Lycée Jean Perrin - Classe de TSI 1
DS de Physique-Chimie 04
Devoir surveillé 04
Physique-Chimie
Correction
I
Premier problème : modélisation d’une suspension de véhicule
1)
Première partie : suspension sans amortissement
1. Effectuons un bilan détaillé des forces :
→
−
−
• force de pesanteur dirigée vers le bas : P = −mg→
uz
• force de rappel élastique de norme k |z(t) − l0 |, dont la direction est également verticale. On détermine le sens
−
en prenant par exemple le cas où le ressort est comprimé, donc z(t) − l0 < 0, et la force est dirigée selon →
u z . Il
→
−
→
−
faut donc que F rappel = −k (z(t) − l0 ) u z
→
− →
−
→
−
→
−
−
−
2. A l’équilibre, on a nécessairement P + F rappel = 0 , soit −k (ze − l0 ) →
u z − mg→
u z = 0 c’est-à-dire après projection
mg
ze = l0 −
k
−
→
− →
−
d→
v
d2 z −
−
3. Appliquons le principe fondamental de la dynamique à la masse : P + F rappel = m→
a =m
= m 2 (t)→
u z soit
dt
dt
→
−
en projetant selon u
z
d2 z
k
k
d2 z
(t)
⇔
(t) + z(t) = ze
d t2
d t2
m
m
r
√
k
= 100 = 10 rad.s−1 , de période associée
4. Il s’agit de l’équation d’un oscillateur harmonique de pulsation ω0 =
m
r
m
2π
T0 =
= 0.63 s. Cette dernière a pour solution :
= 2π
ω0
k
z(t) = A cos (ω0 t + φ) + ze
où A et φ sont des constantes à déterminer à l’aide des conditions initiales. On n’oubliera pas le terme constant ze
correspondant à la solution particulière.
−k (z(t) − l0 ) − mg = m
5. Conditions initiales ? On exprime clairement ce que le sujet veut dire : à l’origine des temps, z(t = 0) = z0 et
dz
(t = 0) = v(t = 0) = 0. Avec la première condition initiale on
dt
aboutit à A cos(φ) + ze = z0 .
dz
D’autre part,
(t) = −Aω0 sin (ω0 t + φ) soit à t = 0,
dt
−Aω0 sin(φ) = 0. Cette dernière équation conduit à φ = 0 ou π.
Choisissons φ = 0, on a alors A + ze = z0 et
z(t) = ze + (z0 − ze ) cos(ω0 t)
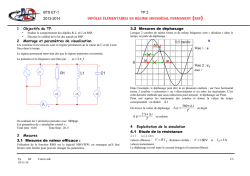
6. L’allure (ci-contre) est triviale, respectez bien les conditions initiales à l’origine des temps, et soignez les schémas... Petit piège
avec le fait que z0 − ze < 0 et il faut donc tracer l’allure de
− cos !
2)
Deuxième partie : suspension avec amortissement
7. Cette constante est homogène à une force divisée par une vitesse, soit [h] =
kg.s−1 dans le système international.
M.L.T−2
= M.T−1 soit exprimée en
L.T−1
dz −
−
8. Au bilan des forces précédent s’ajoute la force de frottements −h→
v = −h (t)→
u z , s’annulant à l’équilibre. Par
dt
conséquent la position d’équilibre déterminée précédemment est inchangée.
1
E. Van Brackel
Lycée Jean Perrin - Classe de TSI 1
DS de Physique-Chimie 04
−
9. En écrivant à nouveau le principe fondamental de la dynamique projeté selon →
u z , on aboutit à
2
h dz
d z
k
k
(t) +
(t) + z(t) = ze
d t2
m dt
m
m
10. Deux raisonnements sont possibles :
√
ω0
km
h
mω0
• soit on applique directement le cours, en identifiant
= , d’où Q =
=
et on connaît alors les
Q
m
h
h
1
1
1
trois régimes : soit Q < , apériodique, soit Q = , critique, soit enfin Q > , pseudo-périodique.
2
2
2
h
k
• soit on cherche le polynôme caractéristique : r2 + r +
= 0, on calcule le discriminant, et les régimes se
m
m
déduisent du signe de ∆. Le résultat obtenu sera bien évidemment le même.
11. Si initialement
on est dans le régime critique, l’ajout d’une charge supplémentaire augmente le facteur de qualité
√
(Q ∝ m), et on passe dans le régime pseudo-périodique dès lors que le véhicule est en charge. Il faut donc choisir
l’amortissement tel que, lorsque la voiture atteint le poids total autorisé en charge (PTAC), on soit dans le régime
critique (et donc dans un régime apériodique lorsque la voiture est à vide).
12. Quel que soit le régime transitoire, on tend en régime permanent à ce que z(t) − zs = ze , c’est-à-dire que la distance
à la route soit la distance à l’équilibre. Pendant le régime transitoire, soit on a une évolution exponentielle (cas
apériodique), soit une évolution pseudo-périodique avec amortissement des oscillations au cours du temps :
II
Deuxième problème : régime forcé pour un circuit électrique
1)
Impédances complexes
1. De manière générale, pour un composant traversé par un courant i et une tension u, on définit par analogie avec la
résistance l’impédance Z telle que
u
Z=
i
De manière générale Z ∈ C. Cette dernière vaut pour un condensateur ZC =
1
et pour une bobine ZL = jLω.
jCω
2. Il faut se rappeler de l’équivalence, après introduction des notations complexes, entre dérivation et produit :
df
↔ jω × f
dt
du
Ainsi, avec la relation i = C , pour un condensateur, on aboutit en complexe à i = Cjωu soit
dt
1
u
=
= ZC
i
jCω
3. La relation du pont diviseur n’est applicable que sous réserve de pouvoir employer les impédances complexes, c’est-àdire uniquement en régime sinusoïdal forcé pour condensateur et bobine, mais tout le temps pour une résistance.
4. Limites à fréquence nulle et fréquence infinie ? A partir des expressions des impédances, on constate que pour ω → 0,
ZC → ∞ et ZL → 0, soit en réfléchissant plutôt en terme de résistances, le condensateur ne laisse passer aucun
courant ("résistance" infinie) et est donc équivalent à un interrupteur ouvert, tandis que la bobine est équivalente à
un fil (ce qu’elle est structurellement, en fait...). Dans la limite ω → ∞, les conclusions sont inversées.
2
E. Van Brackel
Lycée Jean Perrin - Classe de TSI 1
2)
DS de Physique-Chimie 04
Filtre fréquentiel
1. A basse fréquence comme à haute fréquence, l’association parallèle condensateur-bobine est équivalente à un fil,
d’après la question précédente (l’un joue le rôle de fil, l’autre d’interrupteur ouvert). Par conséquent on observe que
s(t) = e(t) dans les limites basses et hautes fréquences. On s’attend donc soit à un coupe-bande, soit éventuellement
à un passe-bande amplificateur (c’est-à-dire que le gain serait très grand uniquement dans une petite bande de
fréquence). On peut penser à un passe-tout, mais quelle utilité ?
2. Etant donné que le système est linéaire car composé d’éléments linéaires (dans le sens où les équations différentielle
obtenues à l’aide de ces composants est linéaire), la pulsation de sortie, en régime forcé, sera la même que celle en
entrée. Le système répondra à la même fréquence, mais avec une amplitude et une phase restant à définir.
3. La fonction de transfert définit comment la sortie s(t) est transformée par rapport à l’entrée e(t) en terme d’amplitude
et de phase, selon la fréquence :
s(t)
H(ω) =
e(t)
On définit alors le gain G = 20 log (|H(ω)|) et le diagramme de Bode consiste à représenter ce gain ainsi que le
déphasage, c’est-à-dire arg(H(ω)), en fonction de la fréquence (ou plutôt le logarithme de la fréquence).
4. On commence déjà par calculer l’impédance équivalente aux deux éléments en parallèle :
1
1
1
1
Yeq =
=
+
= jCω +
Zeq
ZC
ZL
jLω
Puis on applique la relation du pont diviseur de tension en régime sinusoïdal forcé :
Re
Yeq e
s=
=
1
R + Zeq
Yeq +
R
Yeq
s(t)
=
. Avec
1
e(t)
Yeq +
R
j
ω
ω
ω0
1
j
1
1
=
−
LCω −
=
−
=
j
L
ω
L ω02
ω
Lω0 ω0
ω
ω
j
ω
ω0
ω0
j
−
−
Lω0 ω0
ω
ω0
ω
=
H=
ω
1
1
ω
ω0
ω0
Q+j
+j
−
−
R
Lω0 ω0
ω
ω0
ω
5. Ecrivons alors la fonction de transfert : H =
Yeq
on aboutit finalement à
Lω0
avec Q =
après multiplication par Lω0 au numérateur
R
et au dénominateur.
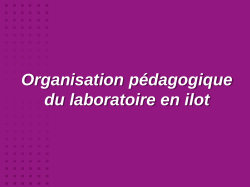
6. Pour ω = ω0 , H(ω0 ) = 0. On s’attend donc à ce
que le filtre soit un coupe-bande, laissant passer les
basses fréquences, les hautes fréquences, mais pas
les fréquences autour de la fréquence propre ω0 .
7. Donnons l’allure du diagramme de Bode en ampliω
tude en fonction de log(x) où x =
:
ω0
8. BONUS : Il est a priori probable que le lien soit le même que pour les résonances en courant d’un circuit RLC, à
ω0
savoir que Q =
. Par conséquent, le filtre sera d’autant plus sélectif que ∆ω est petit, et donc que Q est grand.
∆ω
Cependant, le tracé précédent semble donner un résultat contraire, à savoir que si Q augmente, la courbe devient plus
1
ω0
large. Il semble alors que
∼
, ce qui peut surprendre, mais qui traduit bien la réalité ! La définition du facteur
Q
∆ω
ω0
de qualité est alors à adapter dans le cadre de l’étude des filtres : on prend toujours comme convention que Q =
,
∆ω
mais alors Q n’est certainement plus le même que pour le circuit RLC.
3
E. Van Brackel
© Copyright 2026 Paperzz