システム工学 I
第5回
Lagrange 運動方程式
と状態方程式
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
1
一般化座標の必要性 (1)
• 制御対象はふつう微分方程式によってモデリ
ングされるが, そのためには座標系が必要
• どのような座標系を取るかが問題になる
• 素朴に考えると実験室に固定された直交座標
系で良さそうだが・
・
・
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
2
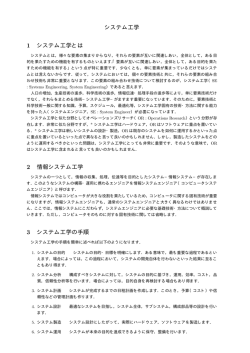
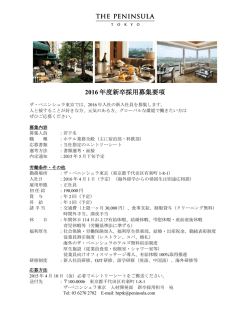
一般化座標の必要性 (2)
• 例として 2 次元の 2 重振り子を考える
θ1
(x1,y1)
(x2,y2)
θ2
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
3
一般化座標の必要性 (3)
• 素朴には, (x1 , y1 ), (ẋ1 , ẏ1 ), (x2 , y2 ), (ẋ2 , ẏ2)
を変数として 8 次元の微分方程式を立てれば
よいが・
・
・
• (θ1 , θ̇1 , θ2 , θ̇2 ) の 4 個の変数で運動は完全に記
述される筈
• 8 次元の微分方程式を立てることは無駄
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
4
一般化座標の必要性 (4)
• 運動を記述するために必要なパラメータ (座
標を一般化したもの) を一般化座標という.
• 一般化座標の時間微分を一般化速度という.
• 一般化座標の次元は, その運動を直交座標系
で表現したときの座標系の次元と同じことも
あれば, そうでないこともある.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
5
一般化座標の必要性 (5)
• 今回の講義以降, 時間に関する 1 階微分をドッ
ト, 2 階微分を 2 重ドットであらわすことが
ある.
d2 x
dx
と ẋ,
と ẍ は同じ意味.
• たとえば,
dt
dt2
... ....
• 稀に x, x などといった記号が使われること
がある.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
6
Lagrangean(1)
• 「力学系の運動を最小限の変数で記述したい」
という要求に答えるのが Lagrangean( Lagrange 関数ともいう) を用いた定式化
• Lagrangean はもともと Newton 力学の再定式
化のために使われたもので, 運動エネルギー
とポテンシャルエネルギーの差として定義さ
れた.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
7
Lagrangean(2)
• 後述するが, Newton 力学は, Lagrangean の
積分が停留値を取るという形で再定式化され
るということが発見された.
• この事実を最小作用の原理という. 最小作用
の原理は Newton 力学の言い換えと解釈する
こともできる.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
8
Lagrangean(3)
• 最小作用の原理は, 物理現象に関する実験事
実を記述した原理であり, 他の物理法則から
導かれるものではない.
• 実は最小作用の原理という名前は不正確. 物
理現象は Lagrangean の積分が停留値を取る
形で実現されるが, 最小であることは保証さ
れない.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
9
Lagrangean(4)
• Lagrangean の積分が停留値を取るための条
件は, 変分法という手法によって導かれ, そ
の結果, Euler の方程式と呼ばれる微分方程
式が出て来る.
• Lagrangean から導かれた Euler の方程式を
Lagrange の運動方程式, Euler-Lagrange
方程式などと呼ぶ.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
10
Lagrangean(5)
• Lagrangean を用いた古典力学の再定式化を解
析力学と呼び, これは量子力学を学ぶために
必須
• 2 足歩行ロボットや多関節マニピュレータの
モデリングの際にも, 変数の数を減らすため
には, Lagrangean を用いた定式化が必須
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
11
Lagrangean(6)
• Lagrangean と, そこから導かれる Hamilton
関数と呼ばれる関数は, 受動性と呼ばれる性
質に基づく制御などに利用されている.
• 古典的な Lagrangean や Hamilton 関数の変数
には物理的な意味があるが (位置, 速度など),
その変数に物理的な意味を与えずに一般化し
たものが最適制御で用いられている
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
12
Lagrangean(7)
• 物理学および最適制御では, ともに Lagrangean
あるいは Hamiltonian が取り扱われるのである
が, その意味合いは異なる:
⊲ 物理学にとって, 物理法則は Lagrangean が
停留値を取る条件として定式化されるとい
うのは, 物理法則
⊲ 最適制御では, Lagrangean が停留値を取る
ような制御入力を求めることが目的
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
13
Lagrangean(8)
• Hamilton 関数の一般化については, van der
Schaft によって port-controlled Hamiltonian system (あるいは port-Hamiltonian
system) という名称で取り纏められた体系が
有名.
• 以下ではまず古典力学における Lagrangean
について説明する.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
14
古典力学における Lagrangean(1)
• 古典力学における Lagrangean(これを L であ
らわす) は, 運動エネルギー (T とする) とポ
テンシャルエネルギー (U とする) の差とし
て定義される. 以下がその定義.
L=T −U
• 続いて, Lagrangean の例を挙げる.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
15
質量 m の物体の自由落下
0 U = −mgx
T = 21 mẋ2
x
L = 21 mẋ2 + mgx
座標軸の原点と
向きに注意
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
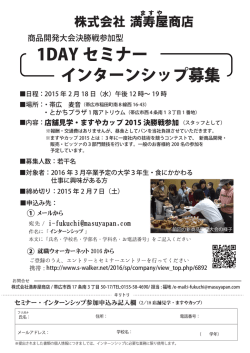
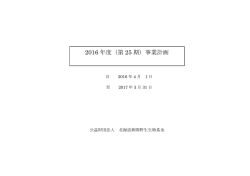
16
長さ l 単振り子 (質量 m)
l
θ
U = mgl(1 − cos θ)
1
T = m(lθ̇)2
2
m
1
L = m(lθ̇)2
2
−mgl(1 − cos θ)
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
17
変分法 (1)
• x, ẋ および t に関する Lagrangean が与えら
れているものとし, これを L(x, ẋ, t) とする.
• 運動開始時刻を ti , 運動終了時刻を tf とし,
Z tf
L(x, ẋ, t)dt が停留値となるための
J =
ti
条件を求めたい. ただし始点と終点を固定す
る: x(ti ) = xi , x(tf ) = xf
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
18
変分法 (2)
• この問題を解くための方法が変分法
Z tf
L(x, ẋ, t)dt の
• 変分法では, x(t) が J =
ti
停留値を与えるための条件を求める.
• x(t) がこの積分の停留値を与えているのであ
れば, x(t) に微小な摂動が加えられても上記
積分はほとんど変動しない.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
19
変分法 (3)
• 変分法では, この「微小な摂動が積分値に影
響を与えない」という条件から, 微分方程式
を導く. このために, x(t) を少しずらして,
x(t) + εh(t) としてみる.
• h(t) は h(ti ) = 0 および h(tf ) = 0 という条
件のみ指定された関数, ε はパラメータ
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
20
変分法 (4)
• 積分値の変動を
∆J とすると・
・
・
Z
tf
∆J =
ti
L(x + εh, ẋ + εḣ, t) − L(x, ẋ, t) dt
• Taylor 展開して,
L(x + εh, ẋ + εḣ, t) = L(x, ẋ, t)
∂L
+ ∂∂L
x εh + ∂ ẋ εḣ + (高次項)
• 高次項は無視する.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
21
変分法 (5)
• 低次項が零となる条件を求めたい
• 任意関数 h の微分が含まれるのは都合が悪い
ので, 部分積分によりこれを消すと・
・
・
Z
tf
ti
tf Z tf
d ∂L
∂L
∂L
ḣdt =
hdt
−
h
∂ ẋ
∂ ẋ
∂ ẋ ti
ti dt
t
ただし f (t) tf は f (tf ) − f (ti ) を意味する.
i
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
22
変分法 (6)
• ここで h(ti ) = h(tf ) = 0 を使うと・
・
・
Z tf ∂L
d ∂L
• ε
hdt が零となる,
−
∂x dt ∂ ẋ
t0
というのが求める条件
• ε, h は任意だったから
d ∂L
∂L
= 0 でなければならない.
−
∂x dt ∂ ẋ
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
23
変分法 (7)
d ∂L
∂L
• 微分方程式
=
を Euler 方程式,
dt ∂ ẋ
∂x
あるいは Euler-Lagrange 方程式という.
• 関数 x(t) が Euler 方程式を満たすことが
,そ
Z
の関数を代入したときの
tf
L(x, ẋ, t)dt の
ti
値が停留値となるための必要条件である.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
24
自由落下の Lagrangean と運動方程式
1
• 自由落下の問題では L = mẋ2 + mgx.
2
∂L
∂L
= mẋ,
= mg を Euler 方程式に代入
•
∂ ẋ
∂x
すると・
・
・
d
•
mẋ = mg, すなわち ẍ = g で, 確かに自由
dt
落下の運動方程式になっている.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
25
単振り子の Lagrangean と運動方程式 (1)
1
• 単振り子では, L = m(lθ̇)2 − mgl(1 − cos θ).
2
∂L
∂L
•
= −mgl sin θ を Euler 方程
= ml2 θ̇,
∂θ
∂ θ̇
式に代入すると・
・
・
• ml2 θ̈ = −mgl sin θ, よって
g
θ̈ = − sin θ
l
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
26
単振り子の Lagrangean と運動方程式 (2)
g
• 微分方程式 θ̈ = − sin θ から単振り子の周期
l
を求めるためには, 楕円積分という手法が必
要になる.
• 初学者向けの議論では, θ が十分小さいと仮
定し, sin θ ≃ θ と近似する. このとき,
g
θ̈ ≃ − θ
l
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
27
散逸関数 (1)
• 物理における Lagrangean は保存則に対応し
たものであり, 摩擦などのエネルギー散逸構
造を持つ系には対応できない
• この問題を解消するために, (Rayleigh の)
散逸関数という関数を Lagrangean に付加す
ることがある.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
28
散逸関数 (2)
• 1 次元の並進運動では, 典型的な動摩擦力モ
デルは, −cẋ.
• 系に摩擦などがある場合には, Euler 方程式
を次のように変更すれば良さそう
∂L
d ∂L
=
− 散逸力の項
{z
}
dt ∂ ẋ
∂x |
追加
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
29
散逸関数 (3)
• 1 次元の並進運動では
, 動摩擦力 −cẋ は,
d 1 2
−
cẋ によって与えられる.
dẋ 2
• 一般化座標および一般化速度で記述された系
∂D(ẋ)
では, 散逸力が
となる関数 D(ẋ) を,
∂ ẋ
何らかの形で構成することを試みる.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
30
散逸関数 (4)
∂D(ẋ)
となる関数 D(ẋ) がうまく
∂ ẋ
見付かったとき, これを (Rayleigh の) 散逸
関数という.
1
• 先に挙げた Q(ẋ) = cẋ2 は Rayleigh の) 散逸
2
関数の一例である.
• 散逸力が
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
31
散逸関数 (5)
• うまく散逸関数 Q(ẋ) が見付かった場合, エ
ネルギー散逸構造を含む系の Euler 方程式は
次のように変わる.
∂L ∂Q(ẋ)
d ∂L
=
−
dt ∂ ẋ
∂x
∂ ẋ
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
32
Lagrange 制御システムと状態方程式 (1)
Lagrangean で記述されたシステムを制御システム
と捉える場合には, もっとも単純には, Euler 方程
式の右辺に入力ベクトル u を追加する. すなわち,
d ∂L
∂L
=
+ u (散逸力なし)
dt ∂ ẋ
∂x
d ∂L
∂L ∂Q(ẋ)
=
−
+ u (散逸力あり)
dt ∂ ẋ
∂x
∂ ẋ
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
33
Lagrange 制御システムと状態方程式 (2)
• Lagrange 制御システムにおいて, 状態変数 z
を z = (z T1 , z T2 )T = (xT , ẋT )T とし, 関数 ψ
を次のように定義する.
d ∂L ∂L ∂Q(ẋ)
ψ(z, ż, u, t) =
−
+
−u
dt ∂ ẋ ∂x
∂ ẋ
• ψ = 0 が ż 2 について解け, ż 2 = η(z, u, t) と
いう形になっていると仮定すると・
・
・
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
34
Lagrange 制御システムと状態方程式 (3)
• 次の (非線形) 状態方程式が得られる.
ż 1 = z 2
ż 2 = η(z, u, t)
• このように解けない場合は以下の形 (ディス
クリプタシステム) を取り扱うしかない:
ż 1 = z 2 ,
0 = ψ(z, ż, u, t)
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
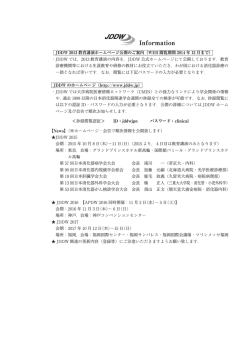
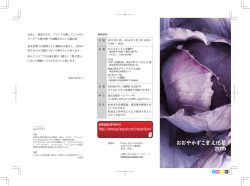
35
Lagrange 制御システムと状態方程式 (4)
• 教科書の例を単純化して, 摩擦のない 2 連の
振動子 (左端固定) の右端に外力 u を加える
問題を考える.
k1
m1
k2
q1
m2
u
q2
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
36
Lagrange 制御システムと状態方程式 (5)
• qi を質量 mi の物体のつり合いの位置からの
変位とし, 各ばねのばね定数を ki とする (i =
1, 2). q = (q1 , q2 )T とする.
1
• 運動エネルギーは
m1 q̇12 + m2 q̇22 , ポテン
2
1
k1 q12 + k2 (q2 − q1 )2
シャルエネルギーは
2
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
37
Lagrange 制御システムと状態方程式 (6)
入力 u は Lagrangean とは無関係なので, Euler 方程式
の導出が終わった後で追加することにして・
・
・
1
1
L=
m1 q̇12 + m2 q̇22 −
k1 q12 + k2 (q2 − q1 )2
2
2
∂L
= m1 q̇1 , m2 q̇2 ,
∂ q̇
∂L
= − (k1 + k2 )q1 − k2 q2 , −k2 q1 + k2 q2
∂q
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
38
Lagrange 制御システムと状態方程式 (7)
d
∂L
= ∂∂L
• 以上を dt
q に代入すると,
∂ q̇
m1 q¨1 = −(k1 + k2 )q1 + k2 q2 , m2 q¨2 = k2 q1 − k2 q2
• 第 2 式には入力 u が追加されているので,
m2 q¨2 = k2 q1 − k2 q2 + u のように変更する. 第 1
式はそのまま.
• 状態変数を (x1 , x2 , x3 , x4 )T = (q1 , q2 , q̇1 , q̇2 )T と
取る
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
39
Lagrange 制御システムと状態方程式 (8)
以上のように変数を取って整理すると・
・
・
ẋ1 = x3
(ẋ1 = q̇1 = x3 だから)
ẋ2 = x4
(ẋ2 = q̇2 = x4 だから)
−(k1 + k2 )
k2
ẋ3 =
x1 +
x2
m1
m1
k1
k2
1
ẋ4 =
x1 −
x2 +
u
m2
mm
m2
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
40
Lagrange 制御システムと状態方程式 (9)
行列を使って書き直すと,
ẋ = Ax + Bu,
0
0
A=
− k1m+k2
1
k1
m2
0
0
k2
m1
k2
−m
2
1
0
0
0
0
1
,
0
0
0
0
B=
0
1
m2
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
41
Lagrange 制御システムと状態方程式 (10)
• 先の式が教科書と違うのは, 教科書と異なり, 摩
擦がない場合を考えているから
• 摩擦を考慮し, 摩擦に対応する散逸関数を D =
1
d1 q̇12 + d2 (q̇2 − q̇1 )2 + d3 q̇22 として計算し直す
2
と教科書の式が得られる.
• 教科書とは大文字の使い方が違うので注意.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
42
Hamilton の運動方程式 (1)
• Lagrangean L(x, ẋ, t) とが与えられていると
いう問題設定に戻る.
• (非線形) 座標変換によって Euler 方程式を別
の形に書き直したい.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
43
Hamilton の運動方程式 (2)
• q = x と書き直し, p =
p を一般化運動量と呼ぶ.
∂L
∂ ẋ
T
と定義する.
• 任意の時刻において (x, ẋ) から (q, p) への変
換が非線形座標変換になっているものと仮定
する. この仮定のもとで, ある関数 η(q, p, t)
が存在し, ẋ = η(q, p, t) である.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
44
Hamilton の運動方程式 (3)
• Hamiltonian H(q, p, t) の定義は次の通り:
H(q, p, t) = pT η(q, p, t) − L(q, η(q, p, t), t)
このようにする理由は, Hamiltonian を使って
Lagrange 形式を表現し直すと (これを Hamiloton の運動方程式という) 見通しが良いこと
(後述). この計算を次に見てゆく.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
45
Hamilton の運動方程式 (4)
∂η ∂L ∂L ∂η
∂H
= pT
−
−
∂q
∂q
∂q
∂ q̇ ∂q
∂η ∂L
∂η
= pT
−
− pT
∂q
∂q
∂q
T
∂L
dp
∂L
d ∂L
=−
=−
=−
=
∂q
∂x
dt ∂ ẋ
dt
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
46
Hamilton の運動方程式 (5)
∂H
∂η ∂L ∂η
= η T + pT
−
∂p
∂p ∂ ẋ ∂p
∂η
∂η
− pT
= η T + pT
∂p
∂p
T
= η = ẋ = q̇
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
47
Hamilton の運動方程式 (6)
• これらをまとめてたものは次の通り. これを
Hamilton の運動方程式という.
T
∂H
q̇ =
∂p
T
∂H
ṗ = −
∂q
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
48
Hamilton 制御システム (1)
• Hamilton 制御システムは, Hamilton の運動
方程式に散逸関数に相当する項と制御入力,
出力関数を付加したもの (以下において D は
定数行列).
• 次のシートには変数を (q T , pT )T のままにし
たものを書くが, x = (xT1 , xT2 ) = (q T , pT )T
と置き直すことが一般的 (xi ∈ Rn , i = 1, 2).
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
49
Hamilton 制御システム (変数 (q T , pT )T )
T
∂H
q̇ =
∂p
T
T
∂H
∂H
−D
+u
ṗ = −
∂q
∂p
T
∂H
y=
∂p
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
50
Hamilton 制御システム: (変数 x)
∂H
∂x
ẋ = J − R
T
∂H
T
y=G
∂x
J =
!
0 In
,R =
−I n 0
T
+ Gu
!
0 0
,G =
0 D
0
In
!
I n は n 次の単位行列
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
51
port Hamiltonian システム (1)
Hamilton 制御システムの行列 J , D , G を x の関数で置
き換えたシステムは port(-controlled) Hamiltonian
システムと呼ばれ, 近年, 活発に研究されている.
∂H T
+ G(x(t))u
ẋ = J (x(t)) − R(x(t))
∂x
T
∂H
T
y = (G(x(t)))
∂x
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
52
port Hamiltonian システム (2)
ただし, 以下の条件が成り立つものとする.
• J (x(t)) は J (x(t)) = −(J (x(t)))T を満たす関
数行列で,
0
0
• R(x(t)) =
0 D(x(t))
• x(t) を固定したとき D(x(t)) は半正定対称行列
とする.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
53
port Hamiltonian システム (3)
• port Hamilton システムの具体例は, メカトロニ
クスや電気回路などで見られる
• 系に自然なエネルギー散逸構造が定まっているた
め, 制御系設計が比較的容易で, ロバスト性が高
いことがメリット
• 一方で, 適用できる対象が限定され, かつ設計の
自由度が低いことがデメリット
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
54
Lagrange の未定乗数法 (1)
• 運動方程式を立てるとき, 運動に束縛条件が付い
た状況を取り扱わなければならないことがある
• たとえば円柱上の物体が斜面を滑らずに転がる,
といった場合
• 一般化座標 q のもとで, ベクトル値関数 C(q) が
与えられ (C(q) ∈ Rl とする), C(q) = 0 を満た
すように運動方程式を立てたい, という状況を考
える.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
55
Lagrange の未定乗数法 (2)
• このような状況で役に立つのが Lagrange の未
定乗数法. 以下ではこの手法について述べる.
• λ ∈ Rl とし, Lagrangean L のかわりに,
LC = L + λT C(q) という関数を考える.
• C(q) = 0 であれば LC = L である.
∂LC
= C(q)T は束縛条件に対応する関数である.
•
∂λ
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
56
Lagrange の未定乗数法 (3)
• したがって, 以下の連立 (微分) 方程式を解けば,
束縛条件がある問題を取り扱うことができる.
∂LC
d ∂LC
=
dt ∂ q̇
∂q
∂LC
=0
∂λ
• このような手法を Lagrange の未定乗数法とい
う.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
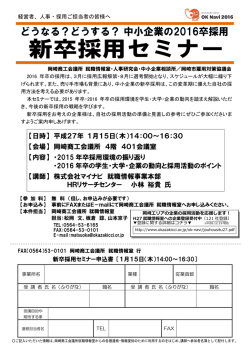
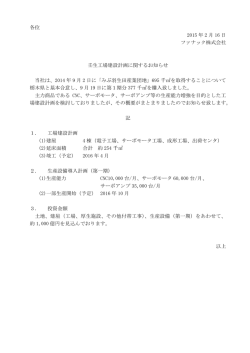
57
Lagrange の未定乗数法 (4)
例として円柱が斜面を転がり落ちる問題を考える.
θ(t)
円柱
質量 m
r
慣性モーメント I
x(t)
α
横から見た図
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
58
Lagrange の未定乗数法 (5)
• 円柱の横滑りは十分小さく無視できると仮定する.
• 円柱の質量は m, 断面の半径は r, 慣性モーメン
トは I とする.
• 斜面の勾配は α とする.
• 運動開始時を基点として, 円柱の設置点の斜面に
沿った移動距離を x(t), 円柱の回転角度を θ(t) と
する. θ(t) は 360 度 (2π) を越えても零に戻さな
いことにする.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
59
Lagrange の未定乗数法 (6)
1
• 時刻 t における円柱の運動エネルギーは mẋ2 +
2
1 2
I θ̇ で, ポテンシャルエネルギーは −mgx sin α
2
• よって, L = 12 mẋ2 + 21 I θ̇ 2 + mgx sin α
• 横滑りしないなら x(t) − rθ(t) = 0.
ゆえに LC = 12 mẋ2 + 21 I θ̇ 2 + mgx sin α + λ(x − rθ)
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
60
Lagrange の未定乗数法 (7)
d
dt
∂LC
∂ ẋ ∂LC
∂ θ̇
∂LC
∂λ
=
=
∂LC
∂x
∂LC
∂θ
=0
⇒ mẍ = mg sin α + λ
⇒ I θ̈ = −rλ
⇒ x = rθ
• 第 2 式から λ = −I θ̈/r,
• 第 3 式を 2 回微分して ẍ = r θ̈
• これらをまとめて λ = −I ẍ/r 2
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
61
Lagrange の未定乗数法 (8)
I ẍ
• λ = − 2 を mẍ = mg sin α + λ に代入すると,
r I
m + 2 ẍ = mg sin α; この微分方程式を解
r
くと円柱の運動が決まる
• I の影響で円柱の移動が遅くなっており, 物理的に
I θ̈
I ẍ
は mẍ = mg sin α + λ における λ = −
=− 2
r
r
の項が摩擦に相当する.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
62
Lagrange の未定乗数法 (9)
• 先に述べた解は「僅かな横滑り」を無視した極限.
• 物体の断面の形状が複雑などの理由で, 物体の回
転軸と質量中心が必ずも一致しない運動には, 「斜
面を滑らずに転がる」という条件が物体の質量中
心の上下動を発生させることがあり得る. この場
合には, 「斜面を滑らずに転がる」という条件を
実現できない可能性がある.
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
63
参考文献
• 畑 (益川監修, 植松, 青山編), 解析力学, 東京図書, 2014
• 原島, 力学, 3 訂版, 裳華房, 1985
• W. M. Haddad and V. Chellaboina, Nonliner Dynamical Systems
and Control, Princeton University Press, 2008
• 野波, 水野 (編集代表), 制御の事典, 朝倉書店, 2015
電 347, 電 397 システム工学 I (2016) 琉球大学工学部電気電子工学科 担当:半塲
64
© Copyright 2026 Paperzz