第 2 章 力学の基礎事項と運動方程式
第 2 章 力学の基礎事項と運動方程式
畔上 秀幸
名古屋大学 情報科学研究科 複雑系科学専攻
December 1, 2016
1 / 39
第 2 章 力学の基礎事項と運動方程式
はじめに
§2.1 はじめに
(目標) ばね系における力のつり合い方程式やばね質点系の運動方程式はある
エネルギーが最小となるあるいは停留する条件によって求められることを理解し
たい.その考え方を用いれば,複雑な力学系の運動方程式も求めることができる
ことをみてみたい.
2 / 39
第 2 章 力学の基礎事項と運動方程式
ポテンシャルエネルギー最小の原理
§2.2 ポテンシャルエネルギー最小の原理
p
k
u
p
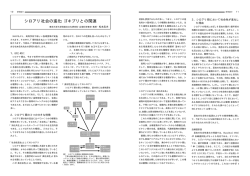
図 2.1: 1 自由度ばね系
3 / 39
第 2 章 力学の基礎事項と運動方程式
ポテンシャルエネルギー最小の原理
例題 2.2.1 (1 自由度ばね系のポテンシャルエネルギー)
図 2.1 のような 1 自由度ばね系に対して,k ∈ R, k > 0, をばね定数,p ∈ R を
外力を表す定数 (R 上のどこにあっても一定の力が発生する保存力),u ∈ R を
変位とする.力の釣合方程式
ku − p = 0
が成り立つとき,u = 0 を基準にしたときのポテンシャルエネルギーを求めよ.
(解答) 力学においてポテンシャルエネルギーは,仕事をする能力を表すエネルギー量と
して定義される.u = 0 を基準にしたときのポテンシャルエネルギーは,力の釣合がとれ
ている 0 の力を変位で積分した
∫ u
1
(2.2.1)
π (u) =
(kv − p) dv = ku2 − pu
2
0
によって与えられる.
□
4 / 39
第 2 章 力学の基礎事項と運動方程式
ポテンシャルエネルギー最小の原理
ポテンシャルエネルギー π を基にすれば,力の釣合方程式はポテンシャルエ
ネルギーの停留条件
dπ
= ku − p = 0
du
によって与えられることになる.そのとき,π が最小になるのは
d2 π
=k>0
d2 u
が成り立つためである.
5 / 39
第 2 章 力学の基礎事項と運動方程式
ポテンシャルエネルギー最小の原理
u1
k1
p1
u2
p2
k2
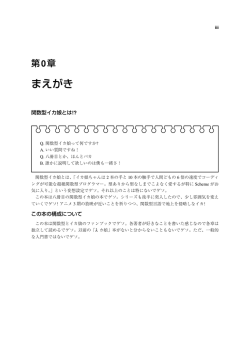
図 2.2: 2 自由度ばね系
例題 2.2.2 (2 自由度ばね系のポテンシャルエネルギー)
図 2.2 のような 2 自由度ばね系を考える.k1 と k2 はばね定数を表す正定数,
T
T
p = (p1 , p2 ) ∈ R2 を外力,u = (u1 , u2 ) ∈ R2 を変位とする.このとき,
u = 0R2 を基準にしたときのポテンシャルエネルギーを求めよ.また,ポテン
シャルエネルギーの停留条件によって力の釣合方程式を求めよ.
6 / 39
第 2 章 力学の基礎事項と運動方程式
ポテンシャルエネルギー最小の原理
(解答) この系のポテンシャルエネルギーは,内部と外部のポテンシャルエネルギーを足
し合わせることにより,
π (u) =
1
1
k1 u21 + k2 (u2 − u1 )2 − (p1 u1 + p2 u2 )
2
2
で与えられる.このとき,ポテンシャルエネルギーの停留条件
∂π
= k1 u1 − k2 (u2 − u1 ) − p1 = 0,
∂u1
∂π
= k2 (u2 − u1 ) − p2 = 0
∂u2
によって力の釣合方程式が得られる.これらの式は,
(
)( ) ( )
k1 + k2 −k2
u1
p1
=
−k2
k2
u2
p2
のようにかくことができる.
(2.2.2)
□
7 / 39
第 2 章 力学の基礎事項と運動方程式
Hamilton の原理
§2.3 Hamilton の原理
k
m
u
p
図 2.3: 1 自由度ばね質点系
8 / 39
第 2 章 力学の基礎事項と運動方程式
Hamilton の原理
時刻 t ∈ (0, tT ) に対して u̇ = ∂u/∂t を速度,κ (u, u̇) を運動エネルギー,
π (u, u̇) をポテンシャルエネルギーとするとき,図 2.3 のばね質点系では,
l (u) = κ (u, u̇) − π (u, u̇) =
1
1
mu̇2 − ku2 + pu
2
2
(2.3.1)
を力学における Lagrange 関数という.さらに,
∫
tT
l (u) dt
a (u) =
0
を作用積分という.Hamilton の原理は時刻 t = 0 と t = tT のときの変位 u (0)
と u (tT ) が与えられているとき,u は a (u) が停留するようにきまることを主張
する.
9 / 39
第 2 章 力学の基礎事項と運動方程式
Hamilton の原理
問題 2.3.1 (Hamilton の原理)
α0 , αT を定数として,U を u (0) = α0 と u (tT ) = αT を満たす u : (0, tT ) → R
の集合,l (u) を (2.3.1) とする.このとき,作用積分
∫
a (u) =
tT
l (u) dt
0
が停留する u ∈ U の条件を求めよ.
10 / 39
第 2 章 力学の基礎事項と運動方程式
Hamilton の原理
u
α0
u+v
u
tT
0
t
βT
図 2.4: Hamilton の原理の変位 u と任意変動 v
11 / 39
第 2 章 力学の基礎事項と運動方程式
Hamilton の原理
(解答) u は u (0) = α0 と u (tT ) = αT の条件を満たす関数の集合 U の要素である.
そこで,u からの任意の変動を表す関数を v : (0, tT ) → R とかくことにすれば,v は
v(0) = 0 および v (tT ) = 0 の条件を満たす必要がある.このような v の集合を V とか
く.このとき,任意の v ∈ V に対して
}
∫ tT {
1
1
m (u̇ + v̇)2 − k (u + v)2 + p (u + v) dt
a (u + v) =
2
2
0
∫ tT
(mu̇v̇ − kuv + pv) dt
= a (u) +
∫
tT
(
+
0
∫
0
1
1
mv̇ 2 − kv 2
2
2
)
dt
tT
= a (u) −
(mü + ku − p) v dt
0
)
∫ tT (
1
1
mv̇ 2 − kv 2 dt
+
2
2
0
12 / 39
第 2 章 力学の基礎事項と運動方程式
Hamilton の原理
が成り立つ.ただし,mu̇v̇ の積分に対して部分積分を行った.この式の右辺を v の次数
ごとにまとめて
a (u + v) = a (u) + a′ (u) [v] +
1 ′′
a (u) [v, v]
2
とかくことにしよう.したがって,a が停留する u ∈ U の条件は
∫ tT
a′ (u) [v] = −
(mü + ku − p) v dt = 0
(2.3.2)
(2.3.3)
0
となる.この条件が任意の v ∈ V に対して成り立つためには,
mü + ku = p
in (0, tT )
(2.3.4)
が成り立たなくてはならない.
□
変分法では a′ (u), a′′ (u) を u における第 1 変分および第 2 変分という.
(2.3.4) は運動方程式である.
13 / 39
第 2 章 力学の基礎事項と運動方程式
Lagrange の運動方程式
§2.4 Lagrange の運動方程式
一般化力と一般化変位を用いて Hamilton の原理を適用すれば Lagrange の運
動方程式を求めることができる.
一般化力と一般化変位はそれらの積がエネルギーとなるように組み合わされ
る.例えば
1
力 と 変位
2
回転モーメント と 角変位
3
トルク と ねじり角変位
などが挙げられる.
14 / 39
第 2 章 力学の基礎事項と運動方程式
Lagrange の運動方程式
時間 (0, tT ) を定義域とする d 次元のベクトル関数
p1
p2
p = . : (0, tT ) → Rd ,
..
pd
u1
u2
u = . : (0, tT ) → Rd
..
(2.4.1)
ud
を一般化力と一般化変位と定義する.
15 / 39
第 2 章 力学の基礎事項と運動方程式
Lagrange の運動方程式
一般化力 p が与えられたとき,一般化変位 u を用いて,
1
2
運動エネルギーを κ (u, u̇),
ポテンシャルエネルギー(一般化保存力による外部ポテンシャルエネルギー
を含む)を π (u, u̇)
とかくことにする.力学における Lagrange 関数を
l (u, u̇) = κ (u, u̇) − π (u, u̇)
(2.4.2)
と定義する.作用積分を
∫
tT
a (u) =
l (u, u̇) dt
0
と定義する.
16 / 39
第 2 章 力学の基礎事項と運動方程式
Lagrange の運動方程式
Hamilton の原理に従って,u (0) = α0 および u (tT ) = αT を固定として,作
用積分 a (u) の第 1 変分を計算すれば,v (0) = 0Rd および v (tT ) = 0Rd を満た
す任意の v に対して
)
∫ tT (
∂l
∂l
a′ (u) [v] =
·v+
· v̇ dt
∂u
∂ u̇
0
)
∫ tT (
d ∂l
∂l
=−
−
· v dt = 0
dt
∂
u̇
∂u
0
が成り立つと仮定する.このとき,
∂l
d ∂l
−
= 0Rd
dt ∂ u̇ ∂u
(2.4.3)
を得る.式 (2.4.3) を Lagrange の運動方程式という.変分法ではこのような汎
関数 f (u) の停留条件を Euler の方程式とよぶ.
17 / 39
第 2 章 力学の基礎事項と運動方程式
Lagrange の運動方程式
保存されない一般化力 h が作用する場合は,
d ∂l
∂l
+
=h
dt ∂ u̇ ∂u
(2.4.4)
のように修正する.さらに,粘性減衰力が作用する場合には,粘性係数
C = (cij )ij ∈ Rd×d を用いて
s (u̇) =
1
u̇ · (C u̇)
2
(2.4.5)
を散逸関数と定義して,
d ∂l
∂l
∂s
+
+
=h
dt ∂ u̇ ∂u ∂ u̇
(2.4.6)
のように修正する.
18 / 39
第 2 章 力学の基礎事項と運動方程式
Lagrange の運動方程式
問題 2.4.1 (1 自由度ばね質点系)
図 2.3 の 1 自由度ばね質点系に対する運動方程式を Lagrange の運動方程式から
求めよ.
(解答)
力学における Lagrange 関数は
l (u, u̇) =
1
1
mu̇2 − ku2 + pu
2
2
(2.4.7)
となる.これを Lagrange の運動方程式に代入すれば,
d ∂l
∂l
d
−
=
(mu̇) + ku − p
dt ∂ u̇
∂u
dt
= mü + ku − p = 0
を得る.
□
19 / 39
第 2 章 力学の基礎事項と運動方程式
Lagrange の運動方程式
問題 2.4.2 (2 自由度ばね質点系)
図 2.5 の 2 自由度ばね質点系に対する運動方程式を Lagrange の運動方程式から
求めよ.
k1
u1
p1
k2
u2
p2
図 2.5: 2 自由度ばね質点系
20 / 39
第 2 章 力学の基礎事項と運動方程式
Lagrange の運動方程式
(解答)
力学における Lagrange 関数は
l (u, u̇) =
1
1
1
1
m1 u̇21 + m2 u̇22 − k1 u21 − k2 (u2 − u1 )2 + p1 u1 + p2 u2
2
2
2
2
(2.4.8)
となる.これを Lagrange の運動方程式に代入すれば,
d ∂l
∂l
d
−
=
(m1 u̇1 ) + k1 u1 − k2 (u2 − u1 ) − p1
dt ∂ u̇1
∂u1
dt
= m1 ü1 + (k1 + k2 ) u1 − k2 u2 − p1 = 0,
d ∂l
∂l
d
−
=
(m2 u̇2 ) + k2 (u2 − u1 ) − p2
dt ∂ u̇2
∂u2
dt
= m2 ü2 − k2 u1 + k2 u2 − p2 = 0
を得る.この連立方程式は
(
)( ) (
m1
0
ü1
k1 + k2
+
0
m2
ü2
−k2
−k2
k2
)( ) ( )
u1
p1
=
u2
p2
とかくことができる.
□
21 / 39
第 2 章 力学の基礎事項と運動方程式
Lagrange の運動方程式
エネルギー原理の歴史
1
Sir Isaac Newton 1642-1727: 第2法則
2
Jean le Rond d’Alembert 1717-1783: 平衡則
3
Johan Bernoulli 1667-1748: 変分法
(流体力学の師は次男 Daniel 1700-1782)
4
Eeonhard Euler 1707-1783: Euler 方程式
5
Joseph Louis Lagrange 1736-1813: Lagrange 関数,Lagrange の運動方程式
6
Willian Rowan Hamilton 1805-1865: Hamilton 関数,Hamilton の原理
22 / 39
第 2 章 力学の基礎事項と運動方程式
Hamilton の運動方程式
§2.5 Hamilton の運動方程式
Hamilton 関数を用いれば,エネルギー保存則を示すことができる.
一般化変位 u に加えて,
q1
q2
q = . : (0, tT ) → Rd
..
(2.5.1)
qd
を一般化運動量と定義する.Hamilton 関数を
h (u, q) = −l (u, u̇) + q · u̇
と定義する.ただし,l (u, u̇) は力学における Lagrange 関数である.また,u̇
は u と q の関数 u̇ = u̇ (u, q) が与えられていると仮定する.
23 / 39
第 2 章 力学の基礎事項と運動方程式
Hamilton の運動方程式
Hamilton 関数 h (u, q) を用いれば,作用積分は
∫
a (u, q) =
∫
tT
tT
l (u, u̇) dt =
0
(q · u̇ − h (u, q)) dt
0
となる.
Hamilton の原理に従って,作用積分 a (u, q) の第 1 変分を計算すれば,次の
ようになる.u (0) = α0 および u (tT ) = αT を固定として,u の変動を表す任
意の関数を v とかき,v (0) = 0Rd および v (tT ) = 0Rd を満たすとする.また,
q の変動を表す任意の関数を r とかくことにする.このとき,Hamilton の原理
では
}
∫ tT {
∂h
∂h
′
a (u, q) [v, r] =
q · v̇ −
· v + u̇ · r −
· r dt
∂u
∂q
0
)
(
) }
∫ tT { (
∂h
∂h
=
− q̇ +
· v + u̇ −
· r dt = 0
∂u
∂q
0
24 / 39
第 2 章 力学の基礎事項と運動方程式
Hamilton の運動方程式
が成り立つと仮定する.これより,
∂h
,
∂u
∂h
u̇ =
∂q
q̇ = −
(2.5.2)
(2.5.3)
を得る.式 (2.5.2) と式 (2.5.3) を Hamilton の運動方程式という.
Hamilton 関数の時間導関数に Hamilton の運動方程式式 (2.5.2) と式 (2.5.3)
に代入すると
dh
∂h du ∂h dq
∂h ∂h ∂h ∂h
=
·
+
·
=
·
−
·
=0
dt
∂u dt
∂q dt
∂u ∂q ∂q ∂u
を得る.したがって,h は定数となる.この関係は,Hamilton の運動方程式が
満たされれば,h は保存されることを表している.すなわち,運動において保存
されるのは Hamilton 関数であることになる.
25 / 39
第 2 章 力学の基礎事項と運動方程式
Hamilton の運動方程式
例題 2.5.1 (1 自由度ばね系の Hamilton 関数)
図 2.1 のような 1 自由度ばね系で p = 0 とおく.この系に対する Hamilton 関数
を求めよ.
(解答)
一般化変位を u とおく.一般化運動量を q = mu̇ とおく.すなわち,
u̇ =
q
m
とおく.このとき,Hamilton 関数は
)
(
1
1
mu̇2 − ku2 + q u̇
h (u, q) = −l (u, u̇) + q u̇ = −
2
2
=−
1 q2
1
q2
1 q2
1
+ ku2 +
=
+ ku2
2m
2
m
2m
2
となる.上式の右辺は運動エネルギーと内部のポテンシャルエネルギーの和を表してい
る.
□
26 / 39
第 2 章 力学の基礎事項と運動方程式
Hamilton の運動方程式
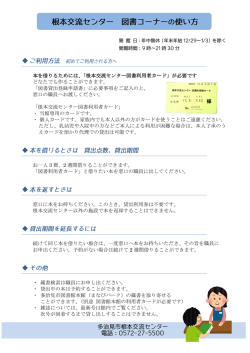
例題 2.5.2 (単振り子の運動方程式)
図 2.6 のような単振り子単振り子の運動方程式を求めよ.
µ
l
l(1–cosµ)
mg
図 2.6: 単振り子
27 / 39
第 2 章 力学の基礎事項と運動方程式
Hamilton の運動方程式
(解答)
一般化変位を θ とおく.このとき,力学における Lagrange 関数は
( )
( )
1 ( )
l θ, θ̇ = κ θ̇ − π (θ) = m lθ̇2 − mgl (1 − cos θ)
2
となる.そこで,Lagrange の運動方程式より,
d ∂l
∂l
−
= ml2 θ̈ + mgl sin θ = 0,
dt ∂ θ̇
∂θ
すなわち
θ̈ +
を得る.
g
sin θ = 0
l
□
28 / 39
第 2 章 力学の基礎事項と運動方程式
Hamilton の運動方程式
例題 2.5.3 (回転円筒の運動方程式)
図 2.7 のような半径 r,奥行き b,密度 ρ の円筒が,半径 l の円筒内面をすべり
なしで転がるときの運動方程式を求めよ.
µ
l
ϕ
r
mg
µ
図 2.7: 回転円筒
29 / 39
第 2 章 力学の基礎事項と運動方程式
Hamilton の運動方程式
(解答)
θ と φ を図のように定義する.このとき,
r (θ + φ) = lθ,
φ̇ =
l−r
θ̇
r
が成り立つ.そこで,この運動系の一般化変位を θ とおき,φ は上式で決定されると考
える.回転慣性モーメントは
∫ r
∫ r
1
j=
ρr2 (2πrb) dr = 2πbρ
ρr3 dr = mr2
2
0
0
となる.ただし,m は円筒の質量である.力学における Lagrange 関数は
( )
( )
1
1
l θ, θ̇ = κ θ̇ − π (θ) = j φ̇2 + m (l − r)2 θ̇2 − mg (l − r) (1 − cos θ)
2
2
1 (l − r)2 2 1
3
= j
θ̇ + m (l − r)2 θ̇2 = m (l − r)2 θ̇2 − mg (l − r) (1 − cos θ)
2
r2
2
4
となる.そこで,Lagrange の運動方程式より,次を得る.
d ∂l
3
∂l
= m (l − r)2 θ̈ + mg (l − r) sin θ = 0
−
dt ∂ θ̇
∂θ
2
□
30 / 39
第 2 章 力学の基礎事項と運動方程式
運動方程式の線形性
§2.6 運動方程式の線形性
定義 2.6.1 (線形性 )
1
関数 u : Rd → Rn が,任意の α, β ∈ R, 任意の x, y ∈ Rd に対して
u (αx + βy) = αu (x) + βu (y)
を満たすとき,u を線形関数 (linear function) , あるいは 線形作用素 (linear
operator) という.
2
同様に,U , V をノルム空間として,写像 D : U → V が,任意の α, β ∈ R,
任意の x, y ∈ U に対して
D (αx + βy) = αDx + βDy
を満たすとき,D を線形作用素 (linear operator) という.
(注)
作用素は,慣例で,D (x) ではなく, Dx とかく.
31 / 39
第 2 章 力学の基礎事項と運動方程式
運動方程式の線形性
微分作用素は線形であることを確認しよう.関数 u : R → R の微分は
du
u (x + ϵ) − u (x)
(x) = lim
ϵ→0
dx
ϵ
で定義される.任意の α, β ∈ R, 任意の関数 u, v に対して
d
αu (x + ϵ) + βv (x + ϵ) − αu (x) − βv (x)
(αu + βv) = lim
ϵ→0
dx
ϵ
αu (x + ϵ) − αu (x)
βv (x + ϵ) − βv (x)
= lim
+ lim
ϵ→0
ϵ→0
ϵ
ϵ
du
dv
=α
+β
dx
dx
が成り立つ.
32 / 39
第 2 章 力学の基礎事項と運動方程式
運動方程式の線形性
線形性の利点: 線形性が成立すれば微分方程式の解を解析的に得ることができ
る.
(第3章)
非線形微分方程式の例
例題 2.5.2 のような単振り子の運動方程式は
l
d2 θ
+ g sin θ = 0
dt2
となる.sin θ は θ = 0 周りで
sin θ = θ −
θ3
θ5
+
+ ···
3!
5!
と展開できる.そこで, θ ≪ π のときには sin θ ≈ θ より,線形化できる.
33 / 39
第 2 章 力学の基礎事項と運動方程式
運動方程式の線形性
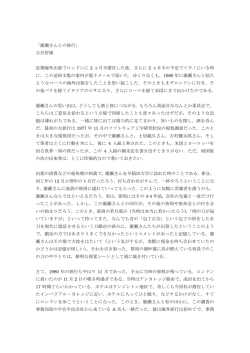
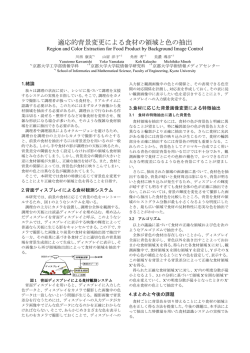
Van der Pol の運動方程式
(
) du
d2 u
− µ 1 − u2
=0
2
dt
dt
を満たす u は,図 2.8 のように,任意の初期条件に対して,あるリミットサイ
クルに落ち込む.この現象は本質的に非線形であると考えられる.
34 / 39
第 2 章 力学の基礎事項と運動方程式
運動方程式の線形性
図 2.8: Van der Pol の運動方程式の解の軌跡
35 / 39
第 2 章 力学の基礎事項と運動方程式
運動方程式の線形性
運動方程式を非線形にする例をいくつか挙げてみる.
f(u)
f(u)
u
u
(a) 硬化ばね
f(u)
(b) 軟化ばね
u
(c) がた
図 2.9: 非線形ばね
36 / 39
第 2 章 力学の基礎事項と運動方程式
運動方程式の線形性
µ
l
l(1–cosµ)
mg
(a) 軟化ばね
(b) 硬化ばね
図 2.10: 大変形による剛性の非線形性
37 / 39
第 2 章 力学の基礎事項と運動方程式
運動方程式の線形性
f(u̇)
f(u̇)
u̇
(a) Coulomb 摩擦
u̇
(b) 動摩擦
図 2.11: 摩擦による減衰の非線形性
38 / 39
第 2 章 力学の基礎事項と運動方程式
まとめ
§2.7 まとめ
力学系に対するエネルギー原理とよばれる考え方についてみてきた.
1
2
3
4
ばね系における力のつり合い方程式やばね質点系の運動方程式はポテンシャ
ルエネルギー最小の原理や Hamilton の原理によって求められることをみて
きた.
さらに,一般化力と一般化変位を用いて,運動エネルギーとポテンシャルエ
ネルギーが求められれば,Hamilton の原理によって,Lagrange の運動方程
式が得られることを確認した.Lagrange の運動方程式を用いれば,ばねと
質点で構成された複雑なシステムであっても,運動方程式を求めることがで
きることをみた.
Hamilton の運動方程式を用いれば,運動方程式を満たすときに保存される
エネルギーは Hamilton 関数であることを確認した.
運動方程式の線形性について,定義といくつかの例をみた.
39 / 39
© Copyright 2026 Paperzz