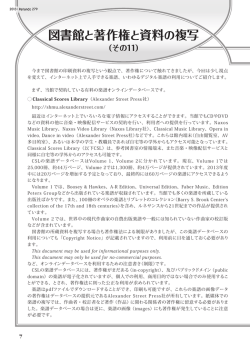
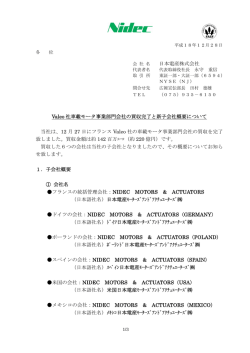
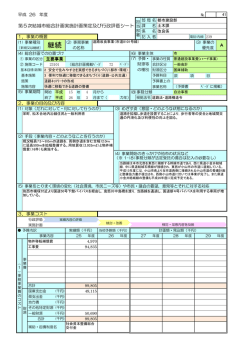
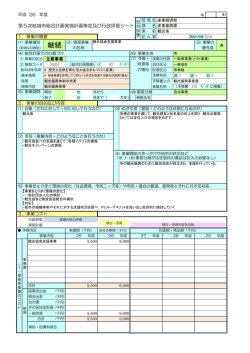
高速高精度位置決め機構(Nano-Motion Actuator:NMA) のダンパ適用による特性変動と制御技術 【研究の特徴】 ・科学技術の急速な発展に伴い、高度情報化社会の進展が目覚ましく、ナノテクノロ ジーを支える基盤技術として、ナノスケールでの位置決め技術がより一層必要とされ ている。このような精密位置決めを実現するアクチュエータとして、積層型圧電素子 (以下PZT)の微小な変位量を拡大する機構について研究を行っている。位置決め機 構の多くは、変位拡大のための機構フレームの弾性変形を利用しており、共振ピー ク値が非常に高く、負荷質量の取り付けなどにより、制御性能を確保できない問題 がある。そこで、粘弾性材と拘束板からなるダンパを機構フレームに張り付けた結果 、共振ピーク値を抑制することが可能となった。しかし、共振周波数より低域側の帯 域に、ゲイン特性が数デシベル低減する現象が見られたため、この現象を改善する 高速高精度制御法を考案した。 【NMA概要、技術内容】 NMA(ダンパ無) NMA(ダンパ有) Gain [dB] 変位方向 ダンパ ダンパ⇒拘束板+粘弾性体 40 30 20 10 0 -10 -20 -30 -40 ゲインの低減部 10 100 1000 10000 Frequency [Hz] ab : ac = 8.3(倍) 周波数特性 NMA ・ダンパ無に比べて、ダンパ有の共振周波数は高くなり、共振ピークも下がり、 高速高精度位置決めの制御性が上がると予想される。 ・しかし、ゲインの低減部が、高速高精度位置決めに影響することが懸念される。 Gain [dB] 0 -10 -20 モデル -30 ダンパ有の周波数応答と モデル化 Displacement [mm] NMA(ダンパ有) 10 1.4 1.2 1 0.8 0.6 0.4 0.2 0 -0.2 目標値 位置決め応答 シミュレーション -0.5 0 0.5 1 1.5 2 Time [ms] 1μmの位置決め結果 ・制御対象のNMAの周波数特性に対しモデル化を行い、PIDコントローラを設計し、 1μmの位置決め制御を行った結果、高速な位置決めは実現したが、位置決めの シミュレーションでは発生しないオーバーシュートが発生した。 ・モデルとの差が発生しているゲインの低減部の影響を検討するために、周波数特 性に合うようにモデルの次数を上げて、シミュレーションを行う。 NMA(ダンパ有) Displacement [mm] Gain [dB] 10 0 -10 -20 高次モデル 初期モデル -30 1.4 1.2 1 0.8 0.6 0.4 0.2 0 -0.2 目標値 高次シミュレーション 初期シミュレーション -0.5 ダンパ有の周波数応答と モデル化の比較 位置決め応答 0 0.5 1 Time [ms] 1.5 2 1μmの位置決めシミュレーションの比較 10 40 0 20 -10 高次モデル -20 -30 高次モデルの周波数特性 Gain [dB] Gain [dB] ・ゲインの低減部のモデル化には部分空間同定法を用い、その結果を高次モデルと し、PIDコントローラを適用した。高次モデルに対する位置決めのシミュレーション結 果は、前述の位置決め応答に合致することを確認した。 ・そこで、高次モデルと初期モデルの比較検証を進めるために、高次モデルの伝達 関数を分子多項式と分母多項式に分け、その周波数分析結果について検討した。 分子多項式 高次モデル =初期モデル × 2次位相進み補償 × 2次位相遅れ補償 0 -20 分母多項式 -40 周波数分析 ・周波数分析結果から高次モデルは、初期モデルに2次の位相進み補償と2次の位 相遅れ補償が、掛け合わせたモデルであることを明らかにした。 ・そこで、 2次の位相進み補償と2次の位相遅れ補償の逆数をPIDコントローラに 適用した改善コントローラにて再度位置決め測定を行う。 改善コントローラ ・PIDコントローラを用いている各種アプリケー ションに対し、本手法を適用することによって 応答改善の可能性があることを示します。 ※詳細は下記へお問い合わせください。 Displacement [mm] ・改善コントローラを用いた位置決め応答は、 高速な応答を損なうこと無く、PIDコントローラ の応答よりもオーバーシュートを抑制できた。 の位置決め応答 目標値 1.2 1 0.8 0.6 0.4 0.2 0 -0.2 高次シミュレーション 初期シミュレーション -0.5 0 0.5 1 1.5 Time [ms] 1μmの位置決め結果の比較 【お問い合わせ先】 秋田県産業技術センター 電子光応用開発部 ナノメカニカル制御グループ 櫻田 陽 TEL:018-866-5800 / FAX:018-866-5803 〒010-1623 秋田県秋田市新屋町字砂奴寄4-21 / http://www.rdc.pref.akita.jp/ 2
© Copyright 2026 Paperzz