座標変換
岡部 洋一
放送大学教授 (東京大学名誉教授)
2013 年 3 月 20 日
起草: 2009 年 6 月 1 日
2
[概要] 一般相対性理論で重要なクリストッフェル記号とか、曲率テンソル
とは何か、曲線座標系における、grad、div、rot などのベクトル微分演算子
はどうなるか、などを統一的に紹介する。また、最後に一般相対性原理につ
いて論じる。
All Rights Reserved (c) Yoichi OKABE 1997-present.
個人の使用以外のコピーを禁じます。また、再コピーおよび再配布は禁止
します。ただし、教育目的に限り、再コピー、再配布は原著者を明示すると
いう条件でのみ許諾します。
[ HTML ファイル ] [ PDF ファイル ] [ 電磁気学 HTML ファイル ] [ 電磁
気学 PDF ファイル ] [ 座標変換の掲示板 ]
[ 岡部の Web に公開の文書 ] [ 岡部のトップページ ]
ii
まえがき
リーマン幾何学という数学の分野がある。これは球面座標系を一般化する
過程で仕上がっていった学問である。球面座標とは地球の表面である球面を
表わすのに使われる緯度経度のことである。数学では、度分秒ではなく弧度
法の θ, φ が使われる。単位ベクトルも、それぞれの角度の 1radian に対応
する接線方向のベクトルで定義されるため、φ 方向の単位ベクトルは、極付
近では赤道付近に比べ極めて短かくなる。つまり、単位ベクトルの長さ 1 も
保証されていない。さらに、ある地点の単位ベクトルと別の地点の単位ベク
トルは、方向も平行ではない。また、球面座標系では直線に相当する線は球
の大円であり、測地線と呼ばれる。二本の大円は必ず二点で交差するから、
平行線が一本も引けないことも知られている。逆に、鞍状の曲面では互いに
交差しない測地線は無数に引ける。
リーマン幾何学は、こうした非ユークリッド空間を扱うのにも便利である
が、それ以外にも電磁場解析などで使われるユークリッド空間である極座標
系や円柱座標系を扱うにも適している。特に、こうした座標における grad、
div、rot などを統一的に扱うことができる。さらに、非ユークリッド空間で
ある相対性理論の理解にも便利であり、特に一般相対性理論を構成する数学
として有名である。
2009 年 6 月 1 日:
座標変換のページを全面書き直し
2009 年 6 月 15 日:
測地線の説明を追加
2009 年 7 月 1 日:
量が増えたため、電磁気学 から分離
2013 年 2 月 23 日:
一般相対性理論の章を完成
iii
目次
第1章
自然基底、反変ベクトル、計量テンソル
1
1.1
自然基底と計量テンソル . . . . . . . . . . . . . . . . . . .
1
1.2
座標変換 . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
1.3
反変ベクトル . . . . . . . . . . . . . . . . . . . . . . . . .
14
双対座標系
20
2.1
双対基底 . . . . . . . . . . . . . . . . . . . . . . . . . . .
20
2.2
双対座標系の計量テンソル . . . . . . . . . . . . . . . . . .
21
2.3
共変ベクトル . . . . . . . . . . . . . . . . . . . . . . . . .
22
2.4
降階、昇階と内積
. . . . . . . . . . . . . . . . . . . . . .
24
第2章
第3章
共変微分
31
3.1
平行移動 . . . . . . . . . . . . . . . . . . . . . . . . . . .
31
3.2
基底の平行移動と接続係数 . . . . . . . . . . . . . . . . . .
33
3.3
計量テンソルと接続係数 . . . . . . . . . . . . . . . . . . .
38
3.4
空間変化するベクトル場と共変微分 . . . . . . . . . . . . .
41
3.5
テンソルの共変微分 . . . . . . . . . . . . . . . . . . . . .
44
3.6
測地線 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
47
曲率
53
第4章
4.1
ベクトル場の二階共変微分商
. . . . . . . . . . . . . . . .
54
iv
目次
4.2
基底のループに沿う移動 . . . . . . . . . . . . . . . . . . .
56
4.3
ベクトルのループに沿う移動
. . . . . . . . . . . . . . . .
58
4.4
曲率テンソルの対称性 . . . . . . . . . . . . . . . . . . . .
60
4.5
リッチテンソル、スカラー曲率とアインシュタインテンソル
62
空間微分演算子
67
5.1
接続係数の計算 . . . . . . . . . . . . . . . . . . . . . . . .
67
5.2
空間微分演算子 . . . . . . . . . . . . . . . . . . . . . . . .
69
5.3
直交曲線座標系における空間微分演算子 . . . . . . . . . . .
71
一般相対性理論
81
6.1
等価原理 . . . . . . . . . . . . . . . . . . . . . . . . . . .
81
6.2
特殊相対性理論の概要 . . . . . . . . . . . . . . . . . . . .
83
6.3
エネルギー運動量テンソル . . . . . . . . . . . . . . . . . .
87
6.4
測地線と重力場中の質点の運動 . . . . . . . . . . . . . . .
93
6.5
アインシュタイン方程式 . . . . . . . . . . . . . . . . . . .
96
6.6
シュバルツシルト解 . . . . . . . . . . . . . . . . . . . . . 100
6.7
ブラックホールはあるのか . . . . . . . . . . . . . . . . . . 105
6.8
その他の相対論の効果 . . . . . . . . . . . . . . . . . . . . 107
第5章
第6章
索引
109
1
第1章
自然基底、反変ベクトル、計
量テンソル
基底 (デカルト座標では単位ベクトルのこと)、座標、距離、内積、座標変
換、ベクトル、テンソル、またリーマン幾何学にとって重要な概念である計
量テンソルについて紹介しよう。
1.1 自然基底と計量テンソル
リーマン幾何学 (Riemanian geometry) で扱う座標系は、デカルト座
標系 (Cartesian coordinate system) のように、座標軸が直線で直交し
ているような単純なものだけでなく、座標軸は直線であるが斜めに交差して
いる直線座標系 (linear coordinate system)、さらに、極座標系のよう
に、座標軸が曲線である曲線座標系 (curvilinear coordinate system)
など、どんな座標系でもよい。なお、実用的な曲線座標系では座標曲線が
直交している直交座標系 (orthogonal coordinate system) が多く、特
に直交曲線座標系 (orthogonal curvilinear coordinate system) とも
呼ばれる。
このようにリーマン幾何学ではかなり自由な座標系を対象とするが、座標
2
第 1 章 自然基底、反変ベクトル、計量テンソル
の変化に連れ、点はゆっくりと移動する、つまり連続性が保証されている空
間しか対象としていない。また各点の近傍で距離が明白に定義されているこ
とが、リーマン幾何学の大前提である。
こ う し た 比 較 的 自 由 な 座 標 系 の 一 点 の 座 標 を (x1 , x2 , · · · , xN ) =
({xm | m = 1, 2, . . . , N }) と表わそう。1,2,N ,m などは上付きサフィッ
クスであり、冪乗ではない。また、何故上付きサフィックスを使うかについ
ては後述する。
また各点で、ある特定の座標 xm だけを 1 増加させたときの点の移動
方向と移動距離を持つベクトル (vector)em を定義し、それを基底ベクト
ルもしくは単に基底 (basis) と呼ぶ。本書では基底と呼ぼう。移動が直線
的でない場合には、基底は微分の概念で定義される。つまり、二点間を結
ぶベクトルの長さを座標の変化分で割ったものを、変化量を限りなく小
さくしたもので定義する。こうしてすべての各座標変化に対応した基底
(e1 , · · · , eN ) = ({em }) が得られる。このように、座標系のクリッドとリン
クした方向と長さを持つ基底を自然基底 (natural basis) と呼ぶ。
デカルト座標系では基底は単位ベクトル (unit vector) と呼ばれる長さ
1 のベクトルとなり、かつ互いに直交する。二次元極座標 (r, φ) では、よく
知られているように、φ = const の放射状の直線群と、r = const の円環状
の曲線群が曲線座標系を構成するが、その上の任意の一点 (原点以外) を中
心に拡大してみると、ほぼ一定の間隔の格子で構成されている。ただし、r
方向の格子間隔は 1 であるのに対し、φ 方向の格子間隔は r と、格子間隔の
方向依存性は明かに存在する。したがって、ある一点における格子の接線方
向を持つ長さ 1 や r のベクトルが自然基底となる。
このように座標系が歪んでいる可能性を持っていても、微小な二点を使っ
て、ベクトルという概念が定義できる。例えば、近接した二つの座標間を結
ぶベクトル ds を
ds = dx1 e1 + · · · + dxN eN =
N
∑
m
dxm em
1.1 自然基底と計量テンソル
3
のように定義しよう。これを線素ベクトル (line element vector) とい
*1
う。dxm は ds の em 方向の成分である。
やや細かい議論となるが、dxm em は長さの単位を持つ。この長さの単位
は em が持つのか dxm が持つのかの議論をしておきたい。例えば二次元極
座標の場合、r 方向は |dx1 e1 | = dr 1 なので、dx1 (= dr) の単位は [m]、e1
の単位は [1] としてよいであろう (もちろん dr の単位を [1]、e1 の単位を [m]
とすることも可能である)。一方、φ 方向は dx2 = dφ として、|dx2 e2 | = dφ r
なので、dx2 (= dφ) の単位は [1](radian は無次元とする)、e2 は単位 [m] と
して r[m] のベクトルとしてよいであろう。つまり、自然基底の単位にも、
ベクトルの成分の単位にも色々あることを理解しておいてほしい。
さて、リーマン幾何学では沢山の
∑
記号が現われる。そこでアインシュ
タイン規約 (Einstein convention) という便利な記法を採用しよう。こ
れは、同じサフィックスが上下に一つずつ現れるときには、総和記号を省略
するというものである。その結果、上式は次のように記載してよいことに
なる。
ds = dxm em
(1.1)
その、長さ ds を線素 (line element) とよぼう。線素の二乗 (以下これ
も簡単に線素とよぶこととする) は次式で与えられる。
ds2 = ds · ds = (dxm em ) · (dxn en ) = (em · en )dxm dxn
ここで、次式で定義される計量テンソル (metric tensor) gmn と呼ばれる
量を定義しよう。
gmn = em · en
(1.2)
右辺の内積は通常の意味の内積であり、|em | などを自然基底の長さ (1 とは限
らない)、θ をこれらベクトルの挟む角度とするとき、em ·en = |em ||en | cos θ
*1
P
右辺は m em dxm と記載してもよい。行列と異なり、積を構成する項の順はどうでも
よい。しかし、これらを行列で表現するときには注意が必要である。
4
第 1 章 自然基底、反変ベクトル、計量テンソル
である。すると、前式は次式のように書くことができる。
ds2 = gmn dxm dxn
何故、線素がよく知られている
∑
m (dx
(1.3)
m 2
) にならないかというと、リー
マン幾何学では、自然基底がいろいろな長さを持ちうるからである。した
がって、gmn とは、自然基底の長さや非直交の補正をしているといってよ
いだろう。em が実数ベクトルであるため、em · en = en · em が成り立ち、
({gmn }) は対称行列となる。
gmn = gnm
(1.4)
なお、詳細は省くが、複素数ベクトルの世界では、({gmn }) はエルミート行
列となる。
em と en が直交している場合、非対角要素は gmn = 0 となり、対角要素
gmm は自然基底 em の二乗長となる。デカルト座標系ではさらに gmm = 1
となる。なお、特殊相対性理論では、線素は ds2 = dx2 + dy 2 + dz 2 − c2 dt2
で定義されるが、dt が大きくなる過去圏や未来圏を向くベクトルでは、ds2
は負となる。その場合には、線素を −ds2 で定義すれば、以後の議論はほぼ
すべて成立する。
空間の各点で定義された一般的なベクトル A(微小ベクトル、微分などで
定義されたベクトル、あるいは場のベクトルなど) は
A = Am em
(1.5)
と成分に展開できる。これから、二つのベクトルの内積 (inner product)
という概念を定義することができる。
A · B = (Am em ) · (B n en ) = (em · en )Am B n = gmn Am B n
(1.6)
B = A とすることで、ベクトルの二乗長を計算することができる。
A · A = (Am em ) · (An en ) = (em · en )Am An = gmn Am An
(1.7)
1.1 自然基底と計量テンソル
5
A = dx とすることで、式 1.3 が得られる。
なお、詳細は省くが、複素ベクトルの場合の内積の定義は次のようになる。
A∗ · B = (Am em )∗ · (B n en ) = (em ∗ · en )Am ∗ B n = gmn Am ∗ B n (1.8)
gmn = em ∗ · en がエルミートテンソルであるので、A · A は常に実数となる。
[例 2.1] [デカルト座標系] デカルト座標系 (x, y, . . . ) では、それ
ぞれの座標軸方向を向く単位ベクトル (ex , ey , . . . ) を基底とすること
により、任意の位置ベクトル x は次式で与えられる。
x = xex + yey + . . .
これから直ちに線素ベクトルは次のように与えらえる。
ds = dxex + dyey + . . .
これより、線素は δmn をクロネッカーのデルタ (Kronecker delta)
として次式で与えらえる。
ds2 = dx2 + dy 2 + · · · = δmn dxm dxn
(1.9)
したがって、デカルト座標系では gmn = δmn である。たとえば、二
次元のデカルト座標系での gmn を行列で書けば、
(
)
1 0
({gmn }) =
0 1
(1.10)
[例 2.2] [二次元極座標系] 二次元極座標系では、r 一定の線は曲
線となり、任意の二点を結ぶベクトルは簡単な式では与えられない。
しかし、微小な領域に限れば、er を動径方向の単位ベクトル、eφ を
円弧方向の接線方向を持つ長さ r のベクトルとして、線素ベクトルは
次式で与えらえる。
s = drer + dφeφ
6
第 1 章 自然基底、反変ベクトル、計量テンソル
eφ の長さが r であることを考慮し、線素は次式で与えられる。
ds2 = dr2 + r2 dφ2
(1.11)
したがって、二次元極座標系の gmn を行列で書けば、
({gmn }) =
(
)
1 0
0 r2
(1.12)
[例 2.3] [三次元極座標系] 三次元極座標系の線素ベクトルは次式
で与えらえる。
ds = drer + dθeθ + dφeφ
であるが、eθ の長さが r 、eφ の長さが r sin θ であるので、線素は次
式で与えられる。
ds2 = dr2 + r2 dθ2 + r2 sin2 θdφ2
(1.13)
したがって、三次元極座標系の gmn を行列で書けば、
1 0
({gmn }) = 0 r2
0 0
0
0
r2 sin2 θ
(1.14)
[例 2.4] [ミンコウスキー空間] 特殊相対性理論で現われるミンコ
ウスキー空間 (Minkowski space) では線素は次式で与えられる。
ds2 = dx2 + dy 2 + dz 2 − c2 dt2
gmn の行列は次のようになる。
1
0
({gmn }) =
0
0
0
1
0
0
0
0
0
0
1
0
0 −c2
(1.15)
(1.16)
となる。通常の相対論の議論では x4 = ct として g44 = −1 とする
が、本章では座標変換の理解を深めるために意識的に x4 = t とし、
1.2 座標変換
7
g44 = −c2 とする。e1 · e1 = 1 などが成立するが、e4 · e4 だけは −c2
となる。長さの絶対値が c と大きいばかりでなく、その二乗長が負と
なるのはやや意外であるが、これは一般的な dx のようなベクトルの
長さに対し、負の寄与をすることを示していると理解すべきである。
また、ベクトル dx の t 成分が大きいと、ベクトルの二乗長も負とな
るが、その場合には、ds2 の代わりに −ds2 を使うとか、時間方向を
重視した二乗時間差 (以下、これも線素と呼ぶ) を使えばよい。
dτ 2 = dt2 − (dx2 + dy 2 + dz 2 )/c2
(= −ds2 /c2 )
これらの例からわかるように、これら直交 (曲線) 座標系における ({gmm })
の対角要素の平方根
√
|gmm | はかなり重要な量である。後に第 5 章「空間
微分演算子」でスケール因子 (scale factor) として詳しく紹介する。
1.2 座標変換
0
元の座標系の上に張られた別の座標系の座標を (xµ |µ0 = 10 , 20 , · · · ) と
し、これらは元の座標系の座標の滑らかな関数で与えらえるとする。多くの
書では、新座標系にはプライムを x0µ のように付すが、本書では、新座標系
のサッフィクスそのものにプライムとを付けることにする。さらにサフィッ
クスが変数である場合には、ギリシャ文字にすることにして区別する。元の
座標系のサフックスはローマンとする。ここでも、サフィックスの上付き、
下付きがあるが、その区別の説明はもう少し先まで待ってほしい。
新たな座標系の方も、デカルト座標系でも直線座標系でも曲線座標系でも
0
構わない。例えば、曲線座標系の場合、xµ = . . . , −1, 0, 1, . . . といった等
座標線 (三次元だと面) を引き、それらによって作られるグリッド (一般には
微小な斜方形や斜方体) に対応して自然基底 eµ0 を定義する。一般には、基
底の長さや方向は場所によってどんどん変化する。
8
第 1 章 自然基底、反変ベクトル、計量テンソル
0
まず、全微分 dxµ を元座標 (x1 , x2 , · · · ) に対して得よう。
dx
µ0
0
∂xµ
=
dxm
∂xm
(1.17)
右辺は m による総和である。分母の上付きは分数全体の下付きとみな
すことになっているので、ここでもアインシュタイン規約を用いている。
0
dxµ と dxm の関係が線形であるとき、その変換をアフィン変換 (affine
0
transform) と言う。∂xµ /∂xm は場所によって緩やかに変化していくの
で、局所的にはアフィン変換と言えるが、大局的にはアフィン変換ではない。
0
0
∂xµ /∂xm はしばしば ∂m xµ と略記されるが、本書ではこれをさらに簡
0
µ
略化し、∂m
と略記することにしよう。
0
0
µ
dxµ = ∂m
dxm
(1.18)
元の座標系の成分から新しい座標系の成分へ変換 (transform) すること
0
µ
を順変換 (forward transform) と呼び、ここに現われた ∂m
を変換係数
(transform coefficient) と呼ぶ。すぐ後に現われるように、この逆数も
変換係数と呼ばれる。そこで、本書ではこの係数を便宜的に反変変換係数
(contravariant transform coefficient) と呼んでおこう。*2
式 1.17 や式 1.18 は行列を使って書きあらわすことができる。 例えば、
式 1.18 は
0
0
µ
({dxµ }) = ({∂m
}) ({dxm })
10 10
1
10
dx
dx
∂1
· · · ∂N
.. ..
.
.
..
.. ...
= . = .
dx
*2
N0
0
∂1N
···
N0
∂N
dx
(1.19)
N
反変ベクトルの順変換の際に用いられるという意味でこう名付けた。この係数の逆数は、
直後に説明するが共変ベクトルの順変換に使われるので共変変換係数と名付ける。反変、
共変の意味については後述。面倒なことに、反変ペクトルの逆変換には共変変換係数が
使われ、共変ベクトルの逆変換には反変変換係数が使われる。
1.2 座標変換
9
プライムのついた方の数字が µ に対応することは、容易に想像できるであろ
う。この変換係数からなる行列はヤコビ行列 (Jacobian matrix) とも言
われる。
0
xm が xµ の関数であるとみなすこともできる。その場合には全微分 xm
0
は xµ の偏微分商を利用して、次式のようになる。
0
dxm = ∂µm0 dxµ
(1.20)
これが dx の逆変換 (reverse transform) である。∂µm0 も変換係数であ
るが、本書ではこの係数を便宜的に共変変換係数 (covariant transform
0
µ
coefficient) と呼んでおこう。以後の座標変換では ∂m
と ∂µm0 の二種類の
変換係数が現われる。
ベクトルそのものは元の座標系でも新しい座標系でも不変である。例え
ば、dx を、変換先の自然基底 eµ0 で展開しよう。
0
dx = dxµ eµ0
(= dxm em )
0
この式の括弧内の dxm に式 1.20 を代入し、両辺から dxµ を消去すると、
変換先の自然基底 eµ0 を生成する式を得ることができる。
eµ0 = ∂µm0 em
(1.21)
この式は eµ0 を em で展開した形にもなっており、∂µm0 は、その展開成分で
あることがわかる。注意して欲しいのは、これは基底ベクトルの座標変換を
やっているのではなく、元の座標系の基底ベクトルから順方向に新しい座標
系における基底ベクトルを生成しているのである。またその際には、共変変
換係数が利用される。
0
逆に dxµ に式 1.18 を代入し、両辺から dxm を消去すると、元の座標系の
自然基底 em を変換先の自然基底で展開したときの式を得ることができる。
0
µ
em = ∂m
eµ0
0
µ
ここでも変換係数が、反変変換係数 ∂m
であることを示している。
(1.22)
10
第 1 章 自然基底、反変ベクトル、計量テンソル
ベクトルの座標変換の際、基底ベクトルの生成則と同じ変換係数、つまり
共変変換係数 ∂µm0 で順変換されることを共変 (covariant) と呼び、反変変
0
µ
換係数 ∂m
により変換されることを反変 (contravariant) と呼ぶ。この意
味で、ベクトル dx の成分 dxm は反変成分である。
リーマン幾何学では、反変の量のサフィックスは上付きにし、共変の量
のサフィックスは下付きにするという規則がある。これで、何故 dxm は上
付きとなるかが分ったであろう。em と eµ0 は互いに異なるベクトルである
が、たまたま、共変的な式で結び付けられるため、下付きサフィックスを付
けている。
さらにアインシュタイン規約では、同じサフィックスが上下に現われたと
きのみ、総和記号
∑
を省略できるとなっているが、今迄の式を振り返って、
これらの事実を確かめてみよう。
なお、今後度々現われる変換係数に関る次の式を確認しておこう。
0
0
∂xn
∂xn ∂xµ
n
=
= δm
0
µ
m
∂x ∂x
∂xm
0
0
∂xν ∂xm
∂xν
ν0
=
=
0
0 = δ µ0
m
µ
µ
∂x ∂x
∂x
µ
∂µn0 ∂m
=
ν0 m
∂µ0
∂m
(1.23)
一言でいえば、順変換して逆変換すれば元へ戻る、逆変換して順変換すれば
元へ戻るということである。
続いて計量テンソル gmn の変換則を求めよう。
gµ0 ν 0 = eµ0 · eν 0 = (∂µm0 em ) · (∂νn0 en ) = ∂µm0 ∂νn0 (em · en ) = ∂µm0 ∂νn0 gmn
(1.24)
つまり、gmn は二つのサフックスに依存しているが、各サフィックスごとに
自然基底と同じ共変変換係数を用いた変換を受ける。
一般に、二つのサフィックスを持ち、それぞれがベクトルの成分と同様に
変換される (共変でも反変でも両者が混ざっていてもよい) 量を持つものを
テンソルと呼ぶ。gmn は、二つのサフィックスとも共変変換を受けることか
ら、テンソルの共変成分と呼ばれる。なお、上式より ({gmn }) が対称行列な
1.2 座標変換
11
ので、({gµ0 ν 0 }) も対称行列であることが誘導できる。逆変換はいうまでも
なく、反変変換係数を用いて計算できる。
0
0
0
0
0
0
µ
µ ν
µ ν
gmn = em · en = (∂m
eµ0 ) · (∂nν eν 0 ) = ∂m
∂n (eµ0 · eν 0 ) = ∂m
∂n gµ0 ν 0
(1.25)
球面座標系は、三次元空間に置かれた球面という部分空間の上で定義され
ている二次元座標系であり、この二つの空間の座標系の次元は明かに異な
る。本書では、このような場合、次元の大きい方の座標系を xM のような大
文字のサフィックスを用いて、区別することとする。今、元の空間を xM 、
0
部分空間を xµ とし、前者の空間の次元の方が大きいとしよう。このとき、
0
0
xM を xµ の関数として与えるのは簡単であるが、逆に xµ を xM の関数と
して得るには、xM に何らかの制約条件を付けない限り不可能である。しか
し、部分空間側に適切な独立な変数を追加して、三次元にすれば、相互に変
換可能となる。例えば、球面座標系 (θ, φ) に r を追加すればよい。以後の議
論でこのようなテクニックを使うことがあるので、若干記憶しておいてほ
しい。
[例 2.5] [二次元極座標系]
0
({xµ }) = (r0 , φ0 )T を、二次元デカル
ト座標系 ({xm }) = (x, y)T の上に考えよう。なお、ここで極座標系
の変数にプライムがついているのは、曲線座標系だからではなく、元
座標系と変換先座標系の二つの座標系が存在するからであり、変換先
にプライムを付した。右上 T は転置を意味し、横ベクトルを縦ベク
トルにする。この間の変換式は次のようになる。
x = r0 cos φ0
y = r0 sin φ0
(1.26)
これより、微小座標ベクトルに対する逆変換式および共変変換係数
12
第 1 章 自然基底、反変ベクトル、計量テンソル
∂µm0 (m 行 µ0 列) が得られる。
0
({dxm }) = ({∂µm0 })({dxµ })
( ) (
) ( 0)
cos φ0 −r0 sin φ0
dr
dx
=
=
dy
sin φ0 r0 cos φ0
dφ0
(1.27)
また、次の順変換式が成立する。
r0 =
√
x2 + y 2
y
φ0 = tan−1
x
(1.28)
0
µ
これから反変変換係数の行列 ({∂m
})(µ0 行 m 列) は次のようになる。
0
0
µ
({dxµ }) = ({∂m
}) ({dxm })
√
( 0) ( √
)( )
dr
dx
x/ x2 + y 2 y/ x2 + y 2
=
=
dφ0
dy
−y/(x2 + y 2 ) x/(x2 + y 2 )
(
)
(
)
cos φ0
sin φ0
dx
=
− sin φ0 /r0 cos φ0 /r0
dy
(1.29)
0
µ
反変変換係数 ({∂m
}) は共変変換係数 ({∂µm0 }) の逆行列としても得ら
れ、その方が簡単である。
これらの変換係数から、次の基底に関する各式が得られる。ただ
し、上記の行列の転置しないものを利用していることに注意してほ
しい。
er0 = cos φ0 ex + sin φ0 ey
eφ0 = −r0 sin φ0 ex + r0 cos φ0 ey
ex = cos φ0 er0 − (sin φ0 /r0 ) eφ0
ey = sin φ0 er0 + (cos φ0 /r0 ) eφ0
(1.30)
(1.31)
gµ0 ν 0 の値はこの場合、デカルト座標系である gmn = δmn から計算
1.2 座標変換
13
できる。
({gµ0 ν 0 }) = ({∂µm0 })T ({gmn }) ({∂νn0 })
(
)T (
)(
1 0
cos φ0
cos φ0 −r0 sin φ0
=
0
0
0
sin φ
r cos φ
0 1
sin φ0
(
)
1 0
=
0 r02
−r0 sin φ0
r0 cos φ0
)
(1.32)
これから、二つの自然基底 er0 および eφ0 は互いに直交し、かつそれ
ぞれの長さは 1 と r 0 であることがわかる。
[例 2.6] [球面座標系] 球面座標系 (spherical coordinate system) と は 、三 次 元 の 基 準 座 標 系 (xM ) = (x, y, z)T に 置 か れ た
半 径 a の 球 面 上 の 位 置 を 、緯 度 経 度 に 相 当 す る 二 次 元 の 座 標
0
(xµ ) = (θ0 , φ0 )T で表したものである。元々、リーマン幾何学は、
球面幾何学を一般化したものである。そのため、これについて議論し
よう。なお、∂µM0 の計算は M の次元数が µ0 の次元数より大きいから
できることに注意してほしい。
微小座標ベクトルの逆変換式は a を定数として、次のようになる。
x = a sin θ0 cos φ0
y = a sin θ0 sin φ0
(1.33)
z = a cos θ0
したがって反変変換係数 ∂µM0 は次式で与えられる。
0
({dxM }) = ({∂µM0 }) ({dxµ })
a cos θ0 cos φ0 −a sin θ0 sin φ0 ( 0 )
dx
dθ
(1.34)
= dy = a cos θ0 sin φ0 a sin θ0 cos φ0
0
dφ
−a sin θ0
0
dz
また、基底は次のようになる。
eθ0 = a cos θ0 cos φ0 ex + a cos θ0 sin φ0 ey − a sin θ0 ez
eφ0 = −a sin θ0 sin φ0 ex + a sin θ0 cos φ0 ey
(1.35)
14
第 1 章 自然基底、反変ベクトル、計量テンソル
µ0
共変変換係数 ∂M は、次元が不足のため計算できない。
gµ0 ν 0 は eµ0 · eν 0 からも計算できるが、デカルト座標系である
gM N = δM N から、座標変換によっても計算できる。
({gµ0 ν 0 }) = ({∂µM0 }) ({gM N }) ({∂νN0 })T
T
a cos θ0 cos φ0 −a sin θ0 sin φ0
= a cos θ0 sin φ0 a sin θ0 cos φ0
−a sin θ0
0
0
0
a cos θ cos φ −a sin θ0 sin φ0
a cos θ0 sin φ0 a sin θ0 cos φ0
−a sin θ0
0
(
)
1
0
= a2
(1.36)
0 sin2 θ0
この結果からわかるように、計量テンソルは元の座標系の次元数では
なく、球面に拘束された緯度経度の二次元という次元を持つ。した
がって、この瞬間、元の座標系の持つ三次元空間という概念は消滅し
たと言っても過言ではなかろう。なお、二つの自然基底 e0θ および e0φ
の長さはそれぞれ a と a| sin θ 0 | で、かつ互いに直交していることが
わかる。
本文でも述べたように、球面座標系側に r なる第三の変数を導入す
れば、もう少し、わかりのよい議論ができるが、その場合は三次元極
座標系の議論と同じになるので、ここでは省略する。一般には、この
ように便利な変数がいつも簡単に得られるとは限らないのが面倒な点
である。
1.3 反変ベクトル
任意のベクトル A の成分の変換則を求めよう。ただし、曲線座標系では
二点間を結ぶ位置ベクトルのような長いベクトルは対象としない。微小ベク
1.3 反変ベクトル
15
トルや微分により得られるようなベクトル、位置だけで値が決まる場のベク
トルなどが対象である。
元の座標系におけるベクトルの展開式に現われる自然基底を eµ0 で展開し
てみよう。
0
0
µ
µ
A = Am em = Am (∂m
eµ0 ) = (∂m
Am )eµ0
0
(1.37)
0
µ
この係数 ∂m
Am は A を eµ0 で展開したときの成分 Aµ であるから、次式
が得られる。
0
0
µ
Aµ = ∂m
Am
(1.38)
0
µ
順変換に、座標ベクトルと同じ反変変換係数 ∂m
を使っている。
前述のように、自然基底と同じ変換式にしたがうことを共変 (covariant)
といって下付きサフィックスを付け、逆変換式にしたがうことを反変 (con-
travariant) といって上付きサフィックスを付ける。このため、Am は、ベ
クトル A の 反変成分 (contravariant component) と呼ばれ、上付き
サッフィクスを用いる。なお、ベクトルの反変成分は、他書では反変ベクト
ル (contravariant vector) と記載されているが、本書ではその意味を考
え、あえて反変成分と表現した。
今度は変換先の座標系の展開式に現われる eµ0 の方を変換してみよう。
0
0
0
A = Aµ eµ0 = Aµ (∂µm0 em ) = (∂µm0 Aµ )em
(1.39)
0
この係数 ∂µm0 Aµ は A を em で展開したときの成分 Am であるから、次式
が得られる。
0
Am = ∂µm0 Aµ
(1.40)
このように反変成分は、逆変換には共変変換係数を使う。
変換先の座標系における内積を、変換先の成分で表してみよう。
0
0
0
0
µ
A · B = gmn Am B n = (∂m
∂nν gµ0 ν 0 ) (∂κm0 Aκ ) (∂λn0 B λ )
0
0
0
0
µ
∂nν ∂κm0 ∂λn0 ) gµ0 ν 0 Aκ B λ
= (∂m
0
0
0
0
0
= (δκµ0 δλµ0 ) gµ0 ν 0 Aκ B λ = gµ0 ν 0 Aµ B ν
0
(1.41)
16
第 1 章 自然基底、反変ベクトル、計量テンソル
つまり、内積は変換先でも同じ形で表現され、座標変換に対する不変量つま
りスカラー (scalar) となっている。ここで、式 1.23 を利用した。
ある量の成分が T mn などのように二つのサフィックスで表現でき、かつ
0
0
µ
その成分が ∂m
∂nν など、二つの変換係数の積で変換できるとき、この量を
2 階のテンソル (tensor) の成分と呼ぶ。二つの自然基底 em および en に
絡んだ量が T mn であるとき、T = T mn em ⊗ en のように書かれる。⊗ は
直積といわれる表示法であり、二つの基底の組に絡んでいることと、全体の
変換係数が、それぞれの変換係数の積になることを示しているが、成分の変
換式で表現する方がわかりやすいかも知れない。
0 0
0
0
µ
T µ ν = ∂m
∂nν T mn
(1.42)
なお、この式は直積の定義より容易に導くことができる。
0
0
0
0
µ
µ
T = T mn em ⊗ en = T mn (∂m
eµ0 ) ⊗ (∂nν eν 0 ) = (∂m
∂nν T mn ) eµ0 ⊗ eν 0
0 0
= T µ ν eµ0 ⊗ eν 0
計 量 テ ン ソ ル g も 、二 つ の 基 底 か ら 定 義 さ れ 、そ の 成 分 が gµ0 ν 0 =
∂µm0
∂νn0 gmn と二つの反変変換係数の組合せで変換できることから、テン
ソルの反変成分の代表例である。また応力テンソル T も 2 階のテンソルで
ある。
サフィックスが三つで、かつ基底の変換係数の組合せで変換できる量、例
えば T = T mnk em ⊗ en ⊗ ek は 3 階のテンソルである。この類推から、ベ
クトルは 1 階のテンソルであり、内積などのスカラー (不変量) は 0 階のテ
ンソルである。そうした用語を使う著者も多い。
[例 2.7] [二次元極座標系] 任意ベクトル A の順変換式は前節の例
3 に示した dx の順変換式と同じ形になる。
0
Ar = cos φ0 Ax + sin φ0 Ay
0
Aφ = −(sin φ0 /r0 ) Ax + (cos φ0 /r0 ) Ay
(1.43)
1.3 反変ベクトル
17
同様に逆変換式は次式で与えられる。
0
0
Ax = cos φ0 Ar − r0 sin φ0 Aφ
0
(1.44)
0
Ay = − sin φ0 Ar + r0 cos φ0 Aφ
[例 2.8] [球面座標系] 任意ベクトル A の変換式は前節の例 4 に
示した dx の変換式と同じ形になる。
0
0
Ax = a cos θ0 cos φ0 Aθ − a sin θ0 sin φ0 Aφ
0
0
Ay = −a cos θ0 sin φ0 Aθ + a sin θ0 cos φ0 Aφ
Az = −a sin θ0 Aθ
(1.45)
0
逆変換はできない。
[例 2.9] [ミンコウスキー空間] 特殊相対性理論における変換先の
座標系は、典型的な直線座標系である。変換先の座標系から元の座標
系への順変換式は次式で与えられる。
x = γ(x0 + βct0 )
y = y0
(1.46)
z = z0
t = γ(t0 + βx0 /c)
これらの式から共変変換係数 ∂µm0 を m 行 µ0 列の行列で表すと次のよ
うになる。
γ
0
m
({∂µ0 }) =
0
γβ/c
0 0
1 0
0 1
0 0
γβc
0
0
γ
(1.47)
これから目標座標系の基底は、次のようになる。なお、以後の議論
ではあまり本質的でない y 、z 成分を省略している。合せて β = 0.6、
√
γ = 1/ 1 − β 2 = 1/0.8 = 1.25、c = 2(本当は 3×108 m/s) を前提と
した数値も示した。
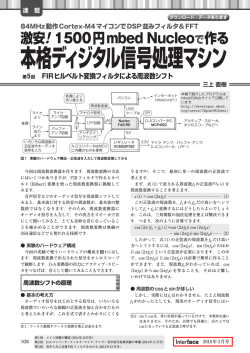
ex0 = γ ex + (γβ/c) et = 1.25 ex + 0.375 et
et0 = γβc ex + γ et = 1.5 ex + 1.25 et
(1.48)
18
第 1 章 自然基底、反変ベクトル、計量テンソル
et0
et
c
A
ex0
ex
0
図 1.1 自然基底の変換とベクトル (反変成分を推定せよ)
これら基底を図 1.1 に示した。
また、順変換式より反変変換係数が得られる (µ 行 m 列)。
(
0
µ
({∂m
}) =
)
γ
−γβc
−γβ/c
γ
(1.49)
図中、基準座標系で (3, 1) の値を持つ A なるベクトルが、直線座標
系で次のような成分を持つことが、おおよそ読み取れよう。
(
0
({Aµ }) =
(
=
0
Ax
0
At
)
) ( x)
A
γ
−γβc
−γβ/c
γ
At
)( ) (
)
−1.5
3
2.25
=
1.25
1
0.125
(
=
1.25
−0.375
(1.50)
gµ0 ν 0 は次のようになる。
({gµ0 ν 0 }) = ({∂µm0 }) ({gmn }) ({∂νn0 })
(
)T (
)(
)
γ
γβc
1
0
γ
γβc
=
(1.51)
γβ/c
γ
0 −c2
γβ/c
γ
(
)T (
) (
)
γ
γβc
γ
γβc
1
0
=
=
γβ/c
γ
−γβc −γc2
0 −c2
結果を見ると基準座標系の gmn と同じ形になる。これは当然の結果
である。元々、ローレンツ変換は、この計量テンソルが維持されるよ
うに選ばれたからである。
基準座標系の計量テンソルとして、これ以外のものを仮定すると、
通常の直線座標系への変換のように、やや複雑な計量テンソルが得ら
1.3 反変ベクトル
れる。例えば、物理的意味はないが、gmn = δmn としてみると、
({gµ0 ν 0 }) = ({∂µm0 }) ({δmn }) ({∂νn0 }) = ({∂µm0 }) ({∂νm0 })
)T (
)
(
γ
γβc
γ
γβc
=
γβ/c
γ
γβ/c
γ
(
)
2
βc + β/c
2 1 + (β/c)
=γ
βc + β/c 1 + (βc)2
と、非対角要素も入ったかなりひどい形となる。
19
20
第2章
双対座標系
リーマン幾何学では、基底の長さが 1 とは限らないため、計量テンソルが
導入され、内積などの定義に、それが利用される。こうした計算を、さらに
楽にするために導入された双対座標系という概念について説明する。
2.1 双対基底
リーマン幾何学では、基底の長さが 1 とは限らない。このため、ベクトル
の内積や長さの計算に計量テンソルが必要であった。この面倒さを省くため
に導入されたのが双対基底という概念である。雰囲気を言えば、自然基底の
逆数の長さを持つような基底である。
双対基底 (dual basis)({em }) は厳密には次のように定義される.なお
({en }) は自然基底である。
em · en = en · em = δnm
(2.1)
em はすべての自然基底 en (n 6= m) に直交した方向をとり、さらに em の
射影の逆数の長さを持つ。この結果、em · en が必ずしも δmn となること
が保証されていなかった自然基底に対し、双対基底 em を利用することによ
り、通常のベクトル空間と同様な式を確立することができたのである。
2.2 双対座標系の計量テンソル
21
0
µ
上式の最左辺と最右辺に、∂m
∂νn0 を掛ける。
0
0
0
0
µ m
µ
µ
(∂m
e ) · (∂νn0 en ) = ∂m
∂νn0 δnm = ∂m
∂νm0 = δνµ0
自然基底の変換則はすでにわかっているので、左辺の ∂νn0 en は eν 0 にして
よい。
0
0
µ m
∂m
e · eν 0 = δνµ0
µ0
0
さて、変換先の座標系でも、eµ · eν 0 = δν 0 が成立するはずであり、この式
0
を満す eµ は一意に決定されるはずである。これと比較すると、
0
0
µ m
eµ = ∂m
e
(2.2)
なる双対基底の順方向の生成式が得られる。順方向なのに、反変変換係数が
使われている。生成規則が反変的な基底であるので、上付きのサフィックス
を付ける。
この式から直ちに、双対基底の逆生成式も得られる。誘導は読者に一任
する。
em = ∂µm0 eµ
0
(2.3)
2.2 双対座標系の計量テンソル
双対基底 em からも新たな計量テンソル g mn を定義することができる。
g mn = em · en
(2.4)
この g mn の変換則は、双対基底の変換則を利用して求めることができる。
0 0
0
0
0
0
0
0
0
0
µ
µ
µ m
∂nν g mn
∂nν (em · en ) = ∂m
e ) · (∂nν en ) = ∂m
g µ ν = eµ · eν = (∂m
(2.5)
この変換則からわかるように、g mn はテンソルの反変成分である。
22
第 2 章 双対座標系
n
計量テンソル gm
も定義できる。
n
n
gm
= em · en = en · em = δm
(2.6)
n
gm
の変換則は、右辺を座標変換より得られる。
0
0
0
0
gµν 0 = eµ0 · eν = (∂µm0 em ) · (∂nν en ) = ∂µm0 ∂nν (em · en )
0
0
n
= ∂µm0 ∂nν gm
(= δµν 0 )
(2.7)
n
ここには、反変変換係数と共変変換係数が混ざって入っているため、gm
は
テンソルの混合成分である。
n
これで、計量テンソル g の共変成分 gmn 、混合成分 gm
、反変成分 g mn が
揃ったことになる。
2.3 共変ベクトル
この双対基底を使って、任意のベクトル A を展開してみよう。
A = A m em
(2.8)
前節と同様な手順で、次の変換則が得られる。
Aµ0 = Am ∂µm0
(2.9)
ベクトル A の em の成分 Am は、自然基底 em と同じ変換を受けるた
め、ベクトルの共変成分 (covariant component) と呼ばれ、下付きのサ
フィックスを付ける。なお、ベクトルの共変成分は、他書では共変ベクトル
(covariant vector) と記載されているが、本書ではその意味を考え、あえ
て共変成分と表現した。
式 2.9 の ∂µm0 を m 行 µ0 列の行列に対応させるとすると、Aµ0 などは横ベ
2.3 共変ベクトル
23
クトルに対応させるべきである。
({Aµ0 })T = ({Am })T ({∂µm0 })
1
∂10
= (A10 , · · · , AN 0 ) = (A1 , · · · , AN ) ...
∂1N0
···
..
.
···
1
∂N
0
..
.
(2.10)
N
∂N
0
どんなベクトルからも、反変成分も共変成分も求めることができる。例え
ば、微小ベクトル dx も自然基底 em で展開せずに、双対基底 em で展開す
れば、共変成分 dxm が得られる。
dx = dxm em
(2.11)
元々、共変成分を使ってベクトルを定義した方がよいものとして、任意の
スカラー関数 f の空間微分商がある。*1 これは、自然基底が分母に入るから
である。∂m f = ∂f /∂xm を変換してみよう。
∂µ0 f =
∂f ∂xm
∂f
=
= (∂m f ) ∂µm0
0
∂xµ
∂xm ∂xµ0
(2.12)
これが、∂m f の順変換である。この式を式 2.9 と比較してみると、同じ形
をしており、変換係数が、共変変換係数になっていることに着目してほし
い。このため、∂m f は共変成分としての変換を受ける。逆変換は次のよう
になる。
0
µ
∂m f = (∂µ0 f ) ∂m
(2.13)
詳細は次節で説明するが、∂m f から反変成分を求めることも可能である。
その場合には ∂ m f と書き、反変成分となる。
*1
ただ微分と呼ぶと、df も df /dx のいずれを指すかがわからないので、df のような微小
量を微分、df /dx のような微分演算の結果を微分商と呼ぶこととする。
24
第 2 章 双対座標系
2.4 降階、昇階と内積
計量テンソルの共変成分 gmn や反変成分 g mn には、便利な機能がある。
それはベクトルやテンソルの共変や反変を自由に変更できるのである。まず
計量テンソルの共変成分 gmn を使うと、ベクトルの反変成分から共変成分
を得ることができる。
n
gmn An = (em · en ) An = em · A = em · (An en ) = δm
An = Am (2.14)
上付きサフィックスを下付きにしたということで、降階 (lowering) ともい
う。さらに、計量テンソルの反変成分 g mn を使うと、ベクトルの共変成分
から反変成分を得ることができる。
g mn An = (em · en ) An = em · A = em · (An en ) = δnm An = Am (2.15)
下付きサフィックスを上付きにしたということで、昇階 (raising) ともい
う。これらの作業はテンソルについても適用可能である。以後の議論で分か
るように、いろいろな計算が、いちいち変換係数を用いないでも計量テンソ
ルからだけできるようになるため、きわめて便利である。
微分商 ∂m f も共変成分であるので、昇階可能であり、∂ m f = g mn ∂n f で
定義される。これを簡略化して、しばしば ∂ m = g mn ∂n と記載されるが、
ベクトルの偏微分などでは、こううまくはいかないので注意して欲しい。
例えば、計量テンソル自身も 2 階のテンソルであるので、g mn や gmn を
n
用いて、昇階や降階ができる。gmn を g mn を用いて一階昇階すると gm
、も
う一階昇階すると g mn が得られる。逆も成立する。最初の昇階の式を見て
n
n
みると、gm
= δm
なので、({g mn }) と ({gmn }) が互いに逆行列であること
0 0
が言える。さらに、({g µ ν }) と ({gµ0 ν 0 }) も互いに逆行列である。これらは
簡単に証明できるので、各人でトライしてほしい。
n
成分の変換のされ方でサフィックスの上下を付けるので、Tmn 、Tm
、T mn
はそれぞれ、テンソルの共変成分、混合成分、反変成分と呼ばれる。次の節
2.4 降階、昇階と内積
25
で示すように、これらのいずれか一つがわかっていると、他の成分は計算可
能である。
任意の二つのベクトルに対し、A を em で、B を en で展開することによ
り、内積を次式の形で求めることができる。
A · B = (Am em ) · (B n en ) = gmn Am B n
(2.16)
となる。同様な手法により、次の式を証明できる。
A · B = g mn Am Bn
(2.17)
A を em で、B を en で展開することにより、同じ内積を次式の形で求める
こともできる。
n
A · B = (Am em ) · (Bn en ) = δm
Am Bn = Am Bm
(2.18)
となる。同様に
A · B = (Am em ) · (B n en ) = δnm Am B n = Am B m
(2.19)
最後の二式には計量テンソルは見掛け現われてこない。*2
B を A とすることで、ベクトルの二乗長の計算式が得られる。
A · A = gmn Am An = g mn Am An = Am Am
(2.20)
以上の内積に関る複数の式は、m, n を µ, ν に置き換えてもすべて成立する。
つまり、内積は座標変換に対し不変となる。
最後に、gµ0 ν 0 の行列式 |{gµ0 ν 0 }| について議論しておこう。
|{gµ0 ν 0 }| = |{∂µm0 ∂νn0 gmn }| = |{∂µm0 }| |{∂νn0 }| |{(gmn )}|
行列式はたった一つの値しか持たないので、厳密にはサフィックスを付ける
のはおかしい。そこで、以後はなるべく g00 のように表現しよう。つまり、
g00 = J02 g
*2
(2.21)
実は内積をこの式のように簡単な形にするために、共変、反変という概念が導入された
のである。
26
第 2 章 双対座標系
ただし、J0 はヤコビ行列 {∂µm0 } の行列式であり、ヤコビアン (Jacobian)
と呼ばれる。これから
√
√
g00 = J0 g
(2.22)
相対論で扱う空間では g00 や g などは負となる。こうした場合には上式の代
わりに次式を用いることとする。
√
√
−g00 = J0 −g
(2.23)
これから、次式で定義される体積要素が不変量であることが示される (必
要に応じ負号を入れる)。
dV 0 =
√
0
0
g00 dx1 · · · dx4 =
√
0
0
gJ0 dx1 · · · dx4 =
√
gdx1 · · · dx4 = dV
(2.24)
ここで、次式に示す関係を利用した。まず 2 次元空間では、dx1 dx2 =
0
0
0
0
J0 dx1 dx2 が成立する。それは dx1 × dx2 の作る四角形の面積が、({xm })
空間に変換されると、平行四辺形となると同時にその面積が J0 倍になるか
らである。これを拡張すると、一般に、多重微分要素間には次式が成立する。
0
0
dx1 dx2 · · · dxN = J0 dx1 dx2 · · · dxN
0
(2.25)
[例 3.1] [二次元極座標系] 自然基底については、例 2.5 に示した
変換式が成立する。
er0 = cos φ0 ex + sin φ0 ey
eφ0 = −r0 sin φ0 ex + r0 cos φ0 ey
双対基底はこれらと正規直交性が成立しないといけない。簡単に言え
ば、同じ方向を向き、長さが逆数のベクトルを定義すればよい。
0
er = cos φ0 ex + sin φ0 ey
0
eφ = −(sin φ0 /r0 ) ex + (cos φ0 /r0 ) ey
(2.26)
2.4 降階、昇階と内積
27
またベクトルの共変成分の変換式は自然基底の変換式と同じになる。
Ar0 = cos φ0 Ax − r0 sin φ0 Ay
(2.27)
Aφ0 = sin φ0 Ax + r0 cos φ0 Ay
0 0
g µ ν を求めてみよう (µ0 , ν 0 は極座標側)。
0 0
0
0
µ
({g µ ν }) = ({∂m
}) ({g mn }) ({∂nν })
)(
(
cos φ0
cos φ0
sin φ0
=
0 0
0 0
− sin φ0 /r0
− sin φ /r cos φ /r
(
)
1
0
=
0 1/r02
0
sin φ0
cos φ0 /r0
)T
(2.28)
0
これは、er の長さが 1 なのに対し、eφ の長さは 1/r0 であること、
それ故、ベクトルの長さに対し、Aφ0 は 1/r0 倍の寄与があることを
示している。
前節の例とこの例に対し、r 0 が極めて大きい場合の略図を描くこと
により、自然基底と双対基底の直交関係や任意ベクトルの成分の概要
を理解することができるので、ぜひトライしてほしい。
[例 3.2] [球面座標系] 自然基底については、例 2.6 に示した変換
式が成立する。
eθ0 = a cos θ0 cos φ0 ex + a cos θ0 sin φ0 ey − a sin θ0 ez
eφ0 = −a sin θ0 sin φ0 ex + a sin θ0 cos φ0 ey
これらの逆変換は存在しない。したがって双対基底については、順変
換はなく、これらの係数で逆変換を受けることとなる。
0
0
0
0
ex = a cos θ0 cos φ0 eθ − a sin θ0 sin φ0 eφ
ey = a cos θ0 sin φ0 eθ + a sin θ0 cos φ0 eφ
ez = −a sin θ0 eθ
(2.29)
0
ベクトルの共変成分については、自然基底の順変換と同じ変換式と
28
第 2 章 双対座標系
0
et
et0
c
A
ex0
0
ex
0
図 2.1 双対基底と自然基底 (ベクトルの共変成分と反変成分に着目)
なる。
Aθ0 = a cos θ0 cos φ0 Ax + a cos θ0 sin φ0 Ay − a sin θ0 Az
(2.30)
Aφ0 = −a sin θ0 sin φ0 Ax + a sin θ0 cos φ0 Ay
これらの逆変換はない。
0
0 0
0
0
µ
µ
ν
g µ ν は ∂M
などが決まらないため、∂M g M N ∂N
からは計算でき
ない。しかし、({gµ0 ν 0 }) の逆行列としては計算可能である。
({g
µ0 ν 0
−1
}) = ({gµ0 ν 0 })
1
= 2
a
(
1
0
0
1/ sin2 θ0
)
(2.31)
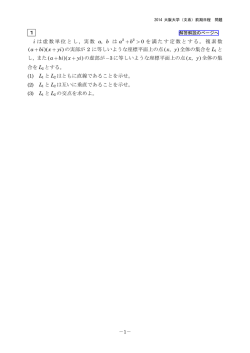
[例 3.3] [ミンコウスキー空間] 図 1.1 に示した相対論の例を使っ
て、双対基底とベクトルの共変成分に対する具体的なイメージを掴も
0
µ m
う。あまり本質的でない y 、z 成分を省略する。双対基底は ∂m
e で
計算できる。
0
ex = γ ex − γβc et = 1.25 ex − 1.5 et
0
et = −(γβ/c) ex + γ et = −0.375 ex + 1.25 et
0
(2.32)
これらを図 2.1 に示すが、(eµ ) が (eµ0 ) に対し直交していることが
よく分かる。
2.4 降階、昇階と内積
29
また、基準座標系で (3, 1) の値を持つ A なるベクトルが、双対座
標系で次のような大きな成分を持つことも、おおよそ読み取れよう。
({Aµ0 }) =
T
({∂µm0
(
Am }) = 3
1
)
(
1.25 1.5
0.375 1.25
)
(
)
= 4.125 5.75
(2.33)
これから A の二乗長を計算することができる。
0
Aµ Aµ0 = 2.25 × 4.125 + 0.125 × 5.75 = 10 = 12 + 32
(2.34)
0 0
g µ ν は次のようになる。
0 0
0
0
µ mn ν
({g µ ν }) = ({∂m
g ∂n })
(
)(
)(
)T
γ
−γβc
1
0
γ
−γβc
=
−γβ/c
γ
0 −1/c2
−γβ/c
γ
(
)(
)T (
)
1
0
γ
−γβ/c
γ
−γβc
=
(2.35)
=
0 −1/c2
−γβ/c −γ/c2
−γβ/c
γ
ということで、g mn と一致する。
0 0
さらに、gµ0 ν 0 の昇階と言ってもよいし、g µ ν の降階と言ってもよ
0 0
0
いが、gµ0 κ0 g κ ν を計算すると、期待通り δµν 0 が得られる。
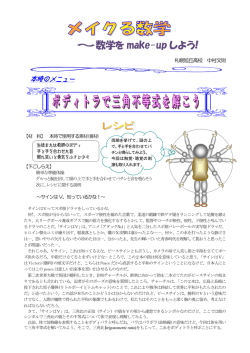
[例 3.4] [勾配ベクトル] 空間微分商の直感的理解を得るために、
図 2.2 を見てほしい。先と同じ直線座標系で、今度は f の等高線が
記載してある。まず、基準座標系では e1 方向に 1 動くと f は 3 増
えるから、∂f /∂x1 = 3、また e2 方向に 1 動くと f は 1 増えるから、
∂f /∂x2 は 1 である。このため基準座標系におけるベクトルは (3, 1)
である。
変換後の直線座標系では、自然基底の e1 方向へ 3 移動すると
f は 4.125 増え、e2 方向へ 3 移動すると f は 5.75 増えるので、
0
0
∂f /∂x1 は 4.125、∂f /∂x2 は 5.75 である。しかし自然基底で見る
と (4.125, 5.75) なるベクトルは元のベクトルとは一致しない。これ
を双対基底系の (4.125, 5.75) ベクトルだと思うと一致するのである。
30
第 2 章 双対座標系
0
et
et0
c
A
ex0
0
6
f =0 3
ex
図 2.2
0
スカラー関数の微分商は共変的である
反変の微分商 ∂ m f (= g mn ∂n f ) は双対基底の方へ移動すること
で、その成分を計算することができ、上記と同様の考察が可能であ
る。作業は読者に任せる。
31
第3章
共変微分
これまでの議論は、固定した一点におけるベクトルやテンソルが、座標変
換によってどう変化するかについて行った。したがって、空間が曲っていよ
うが、直線座標系やデカルト座標系のように真っ直だろうが、余り関係のな
い議論を行なってきた。ところが、位置を移動しはじめると、空間の曲がり
の影響が現われてくる。こうした位置を移動したとき、ベクトルやテンソル
がどう変化するかについて論じよう。これらの微分も位置移動した結果の差
分であるため、位置微分に関する議論であるといってもよいだろう。
3.1 平行移動
リーマン幾何学において重要なのは、与えられた空間を移動することによ
るベクトルの変化である。デカルト座標系では、ベクトルをいくら平行に移
動しても、元の位置へ戻れば元のベクトルに一致する。ところが球面座標系
でベクトルを球面内を出ないように平行移動すると、おかしなことが起る。
例えば地球の中心から北緯 0◦ 、東経 0◦ の方向を x 軸、北緯 0◦ 、東経 90◦ の
方向を y 軸、北極の方向を z 軸としよう。北緯 0◦ 、東経 0◦ にある y 軸を
向いたベクトルを赤道に沿って北緯 0◦ 、東経 90◦ まで球面からベクトルが
飛び出さないように移動すると、ベクトルは −x 軸を向く。次にそれを真北
32
第 3 章 共変微分
に北極まで平行移動すると −x 軸を向いたままである。最後にそれを経線に
沿って北緯 0◦ 、東経 0◦ まで平行移動してくると、ベクトルは z 軸を向く。
つまり、ベクトルを元の位置にまで平行移動しても、平行になるとは限らな
いのである。
こうした議論を正確に行うには、ベクトルの平行移動 (translation) を
厳密に定義しなければならない。二次元の世界である球面座標系は、三次元
のデカルト座標系から見ると、曲り具合がよくわかる。それと同じように、
どんな座標系でも、対象とする点の近傍に限れば、適切にやや多めの次元を
持つ座標系を用意することにより、歪の具合をきれいに記述することができ
ることが知られている。
場所 x で定義された任意のベクトルを A(x) としよう。これを場所 x+dx
まで、対象とする曲線座標系からはみ出さないように平行移動した結果を
A|| (x → x + dx) としよう。このベクトルは明かに元の A(x) を x + dx の
位置にコピーしたもの A(x → x + dx) = A(x) とは僅かに異なる。その差
を A⊥ (x → x + dx) とすると、
A(x → x + dx) = A(x) = A|| (x → x + dx) + A⊥ (x → x + dx) (3.1)
が成立する。A|| (x → x + dx) は対象とする座標系内のベクトルであるか
ら、A⊥ (x → x + dx) は対象とする座標系をはみ出すベクトルである。こ
れが、対象とする座標系に垂直になるとき、A|| (x → x + dx) は平行移動さ
れたベクトルであると定義する。
A⊥ (x → x + dx) · em = 0
(3.2)
A⊥ (x → x + dx) · em = 0
(3.3)
または、
がすべての m に対して成立するとき、A|| (x → x + dx) は平行移動された
ベクトルと言える。つまり、平行移動とは、僅かに離れた位置にベクトルを
コピーし、その射影である。
3.2 基底の平行移動と接続係数
33
なお、平行移動の際、dx を大きくすると、平行移動ベクトルの長さが変
化してしまう。例えば北経 0◦ 東経 90◦ において東を向いたベクトルを、北
経 0◦ 東経 90◦ の位置にコピーし、その射影をとると、長さ 0 のベクトルに
なってしまう。しかし、これを僅かな距離ずつ行なっていけば、期待通りの
平行移動が達成できる。
3.2 基底の平行移動と接続係数
基底もベクトルであるので、平行移動ができる。しかし、移動先の基底は
別の原理で定義されているので、これらは一致しない。なお、本節では、説
明の都合上、x からの移動ではなく、基底を x + dx から x へ平行移動する
場合を考える。例えば、北緯 45◦ 東経 10◦ にある東向きの基底を北緯 45◦ 東
経 0◦ へコピーすると、明かに先端が地表から 10◦ 沈み、さらに、少し北に
向いたベクトルになる。したがって、この射影は、ほぼ東を向いているが、
若干北向きである。一方、この位置における基底は相変わらず東向きに定義
されている。このように、他所から平行移動した基底と、その場所における
基底とは異なるのが一般である。
以後、平行移動した基底と、その場所における基底の関係を式で調べ
てみよう。まず、基底 em (x + dx) を場所 x にコピーしたもの(これも
em (x + dx) である)と、同じ基底を平行移動した e||m (x + dx → x) の関
係は次のようになる。
em (x + dx) = e||m (x + dx → x) + e⊥m (x + dx → x)
(3.4)
e||m (x + dx → x) は、場所 x における基底 em (x) に近いベクトルである
が、若干のずれがある。移動量が少いとき、そのずれは移動量に比例して大
きくなるので、x における基底で展開して次のように表すことができる。一
次の微小量まで書くと、次式のようになる。
e||m (x + dx → x) = em (x) + dxk Γnkm (x) en (x)
(3.5)
34
第 3 章 共変微分
比例係数 Γn
km (x) は、局所的なアフィン変換 (affine transform) を繋い
でいく係数という意味で、アフィン接続係数 (affine connection coeffi-
cient)、または単に接続係数 (connection coefficient) と呼ばれる。
式 3.5 を式 3.4 に代入し、em (x + dx) − em (x) = dxk ∂k em (x) を利用す
ると、
dxk ∂k em (x) = dxk Γnkm (x) en (x) + e⊥m (x → x + dx)
(3.6)
が得られ、両辺に el (x) を掛けて、l → n とすることで次式が得られる。
Γnkm (x) = en (x) · ∂k em (x)
(3.7)
が得られる。これから Γn
km (x) を具体的に計算としても、必ずじも容易では
ない。それは、右辺にベクトルという抽象的な概念の微分商の計算が入って
いるからである。しかし、次節に示すように、この式を手掛かりに、具体的
な計算手法を得ることができる。
何故、こんなややこしい量を導入しなければならないかというと、その
ヒントは式 3.5 にある。例えばベクトルの微分を行うときには、x + dx
における量の処理を x において行うことになる。そのとき、基底として
em (x + dx) を用いると、得られた結果は、対象としている空間を飛び出
してしまい、同じ空間内で処理できなくなってしまう。これを避けるには、
e||m (x → x + dx) を使うのがよく、そのためにこの平行移動した基底を容
易に得られるようにしておく必要があるのである。
つまり、次式で与えられる基底の全微分 (total derivative)
dem (x) = em (x + dx) − em (x) = dxk ∂k em (x)
(3.8)
は ({em (x)}) で表現できないことがあるが、次の量
δem (x) = e||m (x + dx → x) − em (x) = dxk Γnkm (x) en (x)
(3.9)
は ({em (x)}) で表現できるということである。これを基底の完全微分 (ex-
act derivative) と呼ぼう。
3.2 基底の平行移動と接続係数
35
双対基底の位置変化については
0
0
0
0
0
m
k
m
n
em
|| (x + dx → x) = e (x) + dx Γkn0 (x) e (x)
のような展開式を仮定する。この文節では、プライムはもちろん変換先座標
ではなく、双対基底に対するものに付けている。これと式 3.5 との辺々内積
0
0
0
0
n
m
n
をとって一次の微小量までを求める。em
|| · e||m = δm 、e · en = δn を利
用しすると、
0
0
0
0
0
0
m
m
m
n
k n
m
δm
= δm
+ dxk Γkn
0 (x) δm + dx Γkm (x) δn
したがって、両辺からデルタ関数を消し、m → n、m0 → m とすると
0
m
Γkn
(x) = −Γm
kn (x)
(3.10)
が得られる。これから、自然基底の場合と同様に、次の式が得られる。
m
k m
n
δem (x) = em
|| (x + dx → x) − e (x) = −dx Γkn (x) e (x)
(3.11)
さらに、
dem (x) = em (x + dx) − em (x) = dxk ∂k em (x)
(3.12)
を利用して、次式を得、
m
m
dxk ∂k em (x) = em (x + dx) − em (x) = em
|| (x + dx) + e⊥ (x + dx) − e (x)
n
m
= −dxk Γm
kn (x) e (x) + e⊥ (x + dx)
この両辺に el を掛けて後、l → n とすると、次式が得られる。
m
Γm
kn (x) = −en (x) · ∂k e (x)
(3.13)
続いて、式 3.7 を利用して接続係数の座標変換を求めよう。
0
0
0
Γνκ0 µ0 (x) = eν (x) ∂κ0 eµ0 (x) = ∂nν en (x) ∂κ0 (∂µm0 em (x))
0
= ∂nν en (x)(∂κm0 µ0 em (x) + ∂µm0 ∂κk0 ∂k em (x))
0
0
ν
= ∂nν ∂κk0 ∂µm0 Γnkm (x) + ∂m
∂κm0 µ0
(3.14)
36
第 3 章 共変微分
0
0
ここで、∂κm0 µ0 は二階偏微分商 ∂ 2 xm /∂xκ ∂xµ である。右辺第 2 項がある
ため、接続係数はテンソルではない。
この式に、κ0 と µ0 を入替えた式を加減算すると、次の二式が得られる。
]
0
0
1 [ ν0
1
ν0 m
Γκ0 µ0 (x) + Γνµ0 κ0 (x) = ∂nν ∂κk0 ∂µm0 [Γnkm (x) + Γnmk (x)] + ∂m
∂κ0 µ0
2
2
(3.15)
[ 0
]
0
0
Γνκ0 µ0 (x) − Γνµ0 κ0 (x) = ∂nν ∂κk0 ∂µm0 [Γnkm (x) − Γnmk (x)]
(3.16)
つまり、非対称部分はテンソルである。したがって、どこかの系でこれが 0
ならば、その変換先の系では常に 0 となる。幸いにして、我々の扱う多くの
曲線座標系は、非対称部分 0 のデカルト座標系、またはミンコフスキー空間
の中に構築されたものが多いので、以後、非対称部分は 0 の対称性を仮定し
て議論を行う。一方、対称部分はテンソルではない。したがって、系によっ
ては値を有していても、系によっては 0 にできる。もちろん、この話は局所
的であり、大域的に 0 にできる保証はない。
n
例えば、Skm
を 3 階の k と m に関して対称で、さらに場所に依存しない
一定のテンソルとして、次のような変換をしてみよう。
0
0
0
l
3
(xν − xν0 ) = δlν [(xl − xl0 ) + Skm
(xk − xk0 )(xm − xm
0 )+O ]
(3.17)
これから逆変換は
0
0
0
0
0
0
n
δκk0 δµm0 (xκ − xκ0 ) (xµ − xµ0 ) + O3
(xn − xn0 ) = δνn0 (xν − xν0 ) − Skm
(3.18)
となる。これらから、
0
0
0
l
∂nν = δnν + 2δlν Skm
δnm (xk − xk0 )
0
0
n
δκk0 δνm0 (xκ − xκ0 )
∂νn0 = δνn0 − 2Skm
3.2 基底の平行移動と接続係数
37
などが得られ、さらに x = x0 において、
0
0
∂nν = δnν
∂κk0 = δκk0
0
0
n
∂nµ ∂κn0 ν 0 = −2δnµ δκk0 δνm0 Skm
となるので、これらを式 3.15 に代入し、接続係数の対称性を仮定すると、
0
0
n
Γνκ0 µ0 (x) = δnµ δκk0 δνm0 (Γnkm (x) − 2Skm
)
0
n
したがって、Skm
= Γnkm (x0 )/2 とすると、Γνκ0 µ0 (x0 ) = 0 とでき、接続係数
の対称部分を消しさることができる。このような接続係数の対称部分 0 の座
標系を測地座標系 (geodesic coordinate system) と呼ぶ。
なお、式 3.14 と同じ内容を持つ次式は、しばしば利用されるので掲載し
ておく。
0
∂κm0 µ0 = ∂νm0 Γνκ0 µ0 (x) − ∂κk0 ∂µn0 Γm
kn (x)
(3.19)
例えば、これを利用して次のことが示される。基底の全微分を座標変換して
みよう。
0
0
deµ0 = dxκ ∂κ0 eµ0 = ∂kκ dxk ∂κi 0 ∂i (∂µm0 em )
m
= dxk ∂k (∂µm0 em ) = ∂µm0 dxk ∂k em + dxk ∂kµ
0 em
のように、右辺第二項があるため、座標変換に対し不変ではない。しかし、
この右辺第二項をさらに式 3.19 を利用するなどして、変形していこう。
0
0
0
j
m
i
κ
k
m ν
k κ
m
m
dxk ∂kµ
0 em = dx ∂k ∂κ0 µ0 em = ∂k dx (∂ν 0 Γκ0 µ0 − ∂κ0 ∂µ0 Γij ) em
0
0
= dxκ Γνκ0 µ0 eν 0 − ∂µm0 dxk Γnkm en
この式を一つ前の式へ代入し、第二項を左辺へ移項すると、
0
0
0
dxκ ∂κ0 eµ0 − dxκ Γνκ0 µ0 eν 0 = ∂µm0 (dxk ∂k em − dxk Γnkm en )
つまり、dxk ∂k em − dxk Γn
km en = dem − δem (= e⊥m (x + dx → x)) は
座標変換に対し不変なベクトルであることがわかる。
38
第 3 章 共変微分
3.3 計量テンソルと接続係数
式 3.7 により定義された接続係数 Γn
km は、高次元の直線座標系の情報が
わかっていないと計算できず、かなり不便である。幸いにして接続係数の値
は、部分空間の曲線座標系の計量テンソルから計算可能である。なお、接続
係数の対称性を前提に議論を行う。まず式 3.7 の両辺に gnl を掛けて降階し
てみよう。なお、以下の式変形で、(x) は省略して記載する。
gnl Γnkm = el · ∂k em
(3.20)
この式を利用して、次の三式が誘導できる。
∂k gml = ∂k (em · el ) = ∂k em · el + em · ∂k el = gnl Γnkm + gnm Γnkl
∂m glk = gnk Γnml + gnl Γnmk
∂l gkm = gnm Γnlk + gnk Γnlm
(3.21)
これらの式は、後に gmn の変換の際利用されるが、上記 1 式 +2 式 −3 式
を実行し、左右を入れ替えると、次式が得られる。
2gnl Γnkm = ∂k gml + ∂m glk − ∂l gkm
両辺を 2 で割り、左辺の gnl を昇階すると、次の計量テンソルから接続係数
を得る式が得られる。
Γnkm =
1 nl
g (∂k gml + ∂m gkl − ∂l gkm )
2
(3.22)
これにより、いちいち高次元の直線座標系へ戻ることなく、議論ができる基
盤ができたことになる。
な お 、こ の 式 の 右 辺 を 次 式 の よ う に 書 い て 、ク リ ス ト ッ フ ェ ル 記 号
(Christffel symbol) と言う。
{ }
n
km
(= Γnkm )
(3.23)
3.3 計量テンソルと接続係数
39
つまり、対称系では接続係数はクリストッフェル記号と一致する。
ここで、接続係数の具体的な算出方法が確定したので、例を上げておお
こう。
[例 4.1] [二次元極座標系] まず、二次元極座標系の線素と接続係
数の計算式を再掲しておこう。
ds2 = dr2 + r2 dφ2
デカルト座標系に定義された曲線座標系は、デカルト座標系が対称
系であるため、すべて対称系となる。したがって、接続係数はクリス
トッフェル記号で算定できる。二次元空間であるため、接続係数は
2 × 2 × 2 = 8 項しかない。
Γkmn =
1 kl
g (∂m gln + ∂n gml − ∂l gmn )
2
k = r であると、g kl の成分から見て、l = r としてよい。
Γrmn =
1
1
φ φ
φ φ
(∂m grn + ∂n gmr − ∂r gmn ) = − ∂r gφφ δm
δn = −r δm
δn
2
2
k = φ であると、g kl の成分から見て、l = φ としてよい。
Γφmn =
1
1 r φ
φ r
(∂m gφn + ∂n gmφ − ∂φ gmn ) = (δm
δn + δm
δn )
2
2r
r
これらの結果をまとめると、次の 3 項目を除いて残りは 0 であること
がわかる。
Γrφφ = −r
Γφrφ = Γφφr = 1/r
(3.24)
したがって、基底の完全微分は次式で与えられる。
δer = dr (Γrrr er + Γφrr eφ ) + dφ (Γrφr er + Γφφr eφ ) = dφ (1/r) eφ
δeφ = dr (Γrrφ er + Γφrφ eφ ) + dφ (Γrφφ er + Γφφφ eφ )
= dr (1/r) eφ + dφ (−r) er
(3.25)
40
第 3 章 共変微分
er (x + dx)
e||r (x + dx → x)
δer (x)
er (x)
(a)
図 3.1
eφ (x) eφ (x + dx)
(b)
基底の位置による変動
これを図 3.1 に示そう。
(a) は er を dφ 動かした場合で、φ + dφ の位置にある基底と φ の
位置にある基底を比較する際、φ + dφ の位置にある基底を平行移動
し e||r (x + dx → x) とし、それと比較をしている。その差である短
いベクトルが δer (x) である。δer (x) の長さは一定であるが、eφ の
長さが r に比例するため、1/r の係数が付くのが理解できよう。この
場合、r 方向に移動しても、基底は変化しないので、図示していない。
(b) は eφ の変動を示しているが、左の一組は r 方向へ移動したと
きの基底の変動を図示している。いつも φ 方向に一定の差が生じる
が、eφ の長さが r に比例するため、1/r の係数が付く。(b) の右の一
組は eφ を φ 方向に移動した場合で、その差は er の負方向であり、r
に比例する。
[例 4.2] [球面座標系] まず、線素は
ds2 = a2 dθ2 + a2 sin2 θdφ2
この座標系もデカルト座標系の上に定義された対称系であり、クリ
ストッフェル記号が利用できる。二次元空間であるので、接続係数は
2 × 2 × 2 = 8 個ある。k = θ であると、g kl の成分から見て、l = θ
としてよい。
1
1
(∂m gθn + ∂n gmθ − ∂θ gmn ) = − 2 ∂θ gmn
2a2
2a
φ φ
= − sin θ cos θ δm
δn
Γθmn =
3.4 空間変化するベクトル場と共変微分
41
k = φ であると、g kl の成分から見て、l = φ としてよい。
1
(∂m gφn + ∂n gmφ − ∂φ gmn )
sin2 θ
2 sin θ cos θ θ φ
φ θ
=
(δm δn + δm
δn )
2 sin2 θ
Γφmn =
2a2
これらの結果をまとめると、次の 3 項目を除いて 0 であることがわ
かる。
Γθφφ = − sin θ cos θ
Γφθφ = Γφφθ = cot θ
(3.26)
したがって、基底の完全微分は次式で与えられる。
δeθ = dθ (Γθθθ eθ + Γφθθ eφ ) + dφ (Γθφθ eθ + Γφφθ eφ )
= dφ (cos θ/ sin θ) eφ
δeφ = dθ (Γθθφ eθ + Γφθφ eφ ) + dφ (Γθφφ eθ + Γφφφ eφ )
= dθ (cos θ/ sin θ) eφ + dφ (− sin θ cos θ) eθ
θ = 0 の極付近では、二次元極座標に近い結果となるはずである。実
際、二次元極座標の dr を θ に対応させると、同じ結果となる。また
θ = π/2 の赤道付近では、接続係数はすべて 0 となり、比較的平坦な
空間と同様となる。
3.4 空間変化するベクトル場と共変微分
重力場、電磁場などに代表されるベクトル場は場所とともにゆっくり変動
する。こうしたベクトル場 A(x) の位置変動を調べよう。一般ベクトルにつ
いても、差分ベクトルを dA(x) とするのは問題がある。x の場所で差分を
とるとして、A(x + dx) は、考えている空間の次元をはみ出す可能性があ
るからである。そこで、基底の移動と同様に、A(x + dx) を平行移動した
42
第 3 章 共変微分
A|| (x + dx → x) を利用すればよい。これは A(x + dx) を e(x + dx → x)
で基底展開し、その成分を維持したまま、基底を平行移動してくることで求
めることができる。
A|| (x + dx → x) = Am
|| (x + dx → x) e||m (x + dx → x)
= (Am (x) + dAm (x)) (em (x) + δem (x))
= Am (x) em (x) + dAm (x) em (x) + Am (x) δem (x)
= A(x) + dAm (x) em (x) + Am (x) δem (x)
ここで、δA(x) を次式で定義し、A(x) の完全微分 (exact derivative) と
しよう。
δA(x) = A|| (x + dx → x) − A(x) = dAm (x) em (x) + Am (x) δem (x)
= dAm (x) em (x) + dxk Γnkm (x) Am (x) en (x)
(3.27)
この完全微分が自然基底の変動を表す式 3.9 と比較してやや複雑なのは、
A(x) に自然基底の変動に加え、ベクトル場としての空間の変動が加わるか
らである。以後、場所の関数を示す (x) は省略して議論しよう。δA の反変
成分 δAm は次のようになる。
n
δAm = δA · em = dAm + dxk Γm
kn A
(3.28)
第一項は位置変化による A の成分の形式的な変動分であるが、第二項でそ
の中に含まれるベクトルの単純平行移動による変動分を相殺し、全体として
実質的なベクトルの成分の変化を求めている。
ある特定方向 dxk にだけ移動した際の δAm を dxk で除したものを
▽k Am (= δAm /∂xk ) と書き、ベクトルの反変成分の共変微分商 (covariant
differential) と呼ぶ。
▽k Am =
∂Am
δAm
n
m
m
n
=
+ Γm
kn A = ∂k A + Γkn A
dxk
∂xk
(3.29)
共変微分商を含む長い計算をするとき、▽k Am はしばしば Am
:k と記載され
る。本書では可能な限り、▽k を使うこととし、コロンを使う場合には、そ
れを明示することとする。
3.4 空間変化するベクトル場と共変微分
43
∂k Am は 2 階の混合テンソルのように見える。しかし、座標変換してみる
とうまくいかない。
0
0
0
0
µ
µ
∂κ0 Aµ = ∂κ0 (∂m
Am ) = ∂m
∂κ0 Am + ∂κµ0 m Am
0
0
µ
µ
An
= ∂κk0 ∂m
∂k Am + ∂κk0 ∂kn
0
0
0
0
0
µ
µ
µ
ι
ν
n
= ∂κk0 ∂m
∂k Am + ∂κk0 (∂m
Γm
kn − ∂k ∂n Γι0 ν 0 ) A
0
0
µ
µ
n
ν
= ∂κk0 ∂m
(∂k Am + Γm
kn A ) − Γκ0 ν 0 A
0
第三行目の等号には式 3.19 の逆変換を利用した。第一行右辺の第一項だけ
ならばテンソルの混合成分であるが、第二項があるためにうまくいかない
のである。しかし、式変形後の第四行の最終項を左辺へ移動することによ
k
り、∂n Am + Γm
kn A が混合テンソルとなることが直ちにわかろう。それが
式 3.29 に示した ▽n Am なのである。
考えてみれば ▽n は不変量であり、その m 成分である δAm は反変ベクト
ルとなり、さらにその位置ベクトルによる微分商が混合テンソルになること
は容易に想像できる。以後に示す共変ベクトルの微分商やテンソルの微分商
でも δA は共変的であり、このことから、この記号は共変微分 (covariant
derivative) と呼ばれる。
なお、div A はデカルト座標系では ∂m Am であるので、曲線座標系では
次式で定義できる。
n
div A = ▽m Am = ∂m Am + Γm
mn A
(3.30)
ベクトルの共変成分に対しても、反変成分と同様な作業を行うことがで
きる。
δA = A|| (x + dx → x) − A(x) = δ(Am em ) = dAm em + Am δem
n
= dAm em − dxk Γm
kn Am e
δA の共変成分を δAm と書いて、
δAm = δA · em = dAm − dxk Γnkm An
(3.31)
44
第 3 章 共変微分
この結果、ベクトルの共変成分の共変微分商 ▽k Am は次式のようになる。
▽k Am =
δAm
∂Am
=
− Γnkm An = ∂k Am − Γnkm An
dxk
∂xk
(3.32)
▽k Am については、反変成分の微分商のように Am:k と記載されることが
ある。
∂k Am の座標変換もうまくいかない。
∂κ0 Aµ0 = ∂κ0 (∂µm0 Am ) = ∂µm0 ∂κ0 Am + ∂κn0 µ0 An
0
= ∂µm0 ∂κk0 ∂k Am + (∂νn0 Γνκ0 µ0 − ∂κk0 ∂µm0 Γnkm ) An
0
= ∂κk0 ∂µm0 (∂k Am − Γnkm An ) + Γνκ0 µ0 Aν 0
第二行の第一項だけならばテンソルの共変成分であるが、第二項があるた
めにうまくいかないのである。しかし、第三行を見ると、式 3.32 に示した
▽n Am ならば共変テンソルとして、うまく座標変換できることが明かで
ある。
完全微分を dxk で除したものを共変微分商と呼ぶならば、em や em を
dxk で除したものも定義可能である。
▽k em =
▽k em =
δem
= Γnkm en
dxk
(3.33)
δem
n
= −Γm
kn e
dxk
(3.34)
3.5 テンソルの共変微分
任意のテンソルの共変微分や共変微分商はどうなるのであろうか。こうし
た考察を行う際、次の各定理を知っていると便利である。
テンソルの加法
同種のテンソルの和や差は同種のテンソルになる。
テンソルの乗法
テンソルとテンソルの積はテンソルになる。スカラーはそ
の意味で、0 次のテンソルであり、座標変換に対して不変となる。
3.5 テンソルの共変微分
テンソルの縮約
テンソルの商法則
45
センソルを縮約したものはテンソルである。
二つの量の積がテンソルのとき、そのうちの一つがテン
ソルならば、もう一つもテンソルである。
これらの証明はテンソルの種類を仮定すれば、座標変換を使って比
較的簡単にできるので各自に任せるが、参考に商法則のみ示しておこ
う。次のようにテンソルかどうかわからない二次の量 An
m と一次の
テンソル Bk の積がテンソルだったとしよう。その座標変換した結果
0
を Aνµ0 Bκ0 とすると、
0
0
(Aνµ0 Bκ0 ) = ∂µm0 ∂nν ∂κk0 (Anm Bk )
が成立する。一方、Bκ0 = ∂κk0 Bk であるので、この式を左辺へ代入
し、両辺から共通項を削除することにより、次式が得られる。
0
0
Aνµ0 = ∂µm0 ∂nν Anm
これより An
m がテンソルであることが証明された。
さて、まずスカラーの共変微分を求めてみよう。ベクトルの成分の共変微
分が接続係数を含む複雑な変換を受けるのは、基底が変化するからである。
スカラーは基底とは関係ない量であるので、共変微分も偏微分も何ら変らな
い。したがって次式が成立する。
δf = df
(3.35)
▽k f = ∂k f
(3.36)
n
ベクトルの反変成分の共変微分に +dxk Γm
kn A が入り、一方ベクトルの共
変成分の共変微分に −dxk Γn
km An が入ることから、反変でも共変でもない
スカラーについてはこうなることが予測できよう。
46
第 3 章 共変微分
任意のテンソルの共変微分を求める際、テンソルの積の共変微分に対し、
積の偏微分のような部分微分の法則が成り立つことを利用する。例えば、
nk i
nk
i
nk
δ(Tm
Ul ) =T||m
(x + dx → x) U||l
(x + dx → x) − Tm
(x) Uli (x)
nk
nk
nk
=(Tm
(x) + δTm
(dx)) (Uli (x) + δUli (x)) − Tm
(x) Uli (x)
nk i
nk
=δTm
Ul (x) + Tm
δUli (x)
n
それでは、例えば Tm
の共変微分を求めてみよう。これに適切に反変やら
n m
共変ベクトル成分を掛けると Tm
u vn のようなスカラー量を得ることがで
きる。この共変微分を計算してみよう。
n m
n m
n
n m
δ(Tm
u vn ) = δTm
u vn + Tm
δum vn + Tm
u δvn
n m
n
b
n m
a b
= δTm
u vn + Tm
(dum + dxa Γm
ab u ) vn + Tm u (dvn − dx Γan vb )
一方、スカラー量の完全微分は式 3.35 より、全微分と等しいので、次式が成
立する。
n m
n
n m
n m
n m
u dvn
dum vn + Tm
u vn + Tm
u vn ) = dTm
u vn ) = d(Tm
δ(Tm
両式の最右辺を比較し、両辺から等しい項を削除し、さらに両辺を um vn で
割ると、次式が得られる。
l
n
n
− dxk Γlkm Tln + dxk Γnkl Tm
= dTm
δTm
これから、テンソルの共変サフィックスに対しては負号、反変サフィックス
については正号をつけた接続係数を並べればよいことがわかる。サフィック
スはアインシュタイン規約を守るように、適宜配置すればよい。両辺を dxk
で割ることにより、共変微分商をさらに、もっと高次のテンソルの共変微分
も同様に、接続係数を用いて記述できる。
n
n
l
▽k Tm
= ∂k Tm
− Γlkm Tln + Γnkl Tm
(3.37)
この規則を gmn に摘要してみると、
▽k gmn = ∂k gmn − Γlkm gln − Γlkn gml = 0
(3.38)
3.6 測地線
47
この際、接続係数および計量テンソルの対称性と式 3.21 の関係を使った。
n
n
また、gm
= δm
は、
n
n
l
▽k gm
= ∂k gm
− Γlkm gln + Γnkl gm
=0
(3.39)
この際、第一項は 0、第二項と第三項は同じ値で打ち消し合う。さらに、g mn
は、
ln
▽k g mn = ∂k g mn + Γm
+ Γnkl g ml = 0
kl g
(3.40)
この際、式 3.21 に対応する次式を利用した (証明は略す)。
∂k g mn = ∂k (em · en ) = em · ∂k en + en · ∂k em
ln
= −Γnkl g ml − Γm
kl g
(3.41)
3.6 測地線
曲線座標系には測地線 (geodesic line) と呼ばれる概念がある。これは
デカルト座標系における直線のようなもので、通常は、二点間を接続するい
くつかの曲線のうちでもっとも短いものと定義される。より厳密には停留と
いって、ある曲線の付近で曲線を僅かに変形させたとき、その長さがほとん
ど変化しないとき、その曲線を測地線と言う。したがって、長さが最短、極
小、最長、極大、さらには鞍部のような停留も存在する。例えば、球面の任
意の二点を結ぶ曲線で、測地線は大円になることが知られているが、短い方
の円弧は最短の測地線であるが、長い方の円弧はすぐ近傍に作成した小円の
方が短いので、極小でもないし、さらにぐにゃぐにゃと曲げればいくらでも
長くなるので極大でもなく、鞍部のような意味での停留曲線である。
さて、t を媒介変数として、曲線を xm (t) と表わそう。この曲線の長さは
ẋm = dxm /dt として
∫
∫ t1 √
∫
I = ds =
gmn (x) dxm (t) dxn (t) =
t0
t1
t0
√
dt gmn (x) ẋm ẋn
48
第 3 章 共変微分
この被積分関数を L(x, ẋ) とすると、
L(x, ẋ) =
√
gmn (x) ẋm ẋn
である。このようにある量 I が x = ({xm }) や ẋ = ({ẋm }) を含む関数 L
の積分で与えられる場合、これを停留化する条件は、次のオイラー方程式
(Euler equation) で与えられる (証明は他書を参考にされたい)。
(
)
d
∂L
∂L
− k =0
dt ∂ ẋk
∂x
この式へ L(x, ẋ) を代入すると、
d
dt
(
)
gkn ẋn
∂k gmn ẋm ẋn
−
L
2L
n
gkn ẍ
∂m gkn ẋm ẋn
gkn ẋn (dL/dt) ∂k gmn ẋm ẋn
=
+
−
−
=0
L
L
L2
2L
最後の等号の両辺に L を掛け、さらに第二項を半分にして二項に書き換え
ると、
gkn ẍn +
1
(∂m gkn ẋm ẋn + ∂n gkm ẋm ẋn − ∂k gmn ẋm ẋn )
2
gkn ẋn (dL/dt)
=
L
ここで媒介変数 t として、曲線の始点からの距離 s を使うことにすると、
L = ds/dt = 1、dL/dt = 0 となり、式が簡略化できる。さらに、g kl を掛
けて式全体を昇階し、l → k とすると、
d2 xk
dxm dxn
k
+
Γ
=0
mn
ds2
ds ds
(3.42)
が得られる。これが測地線 (geodesic line) の方程式である。なお、証明
は省くが、相対性原理で現われる光線の式は ds2 = 0 を満すが、その場合で
も、s を媒介変数として、光の測地線の式は上式で与えられる。
3.6 測地線
49
測地線は、ベクトルを方向を変えずにどんどん繋いでいって完成する線
でもある。曲線座標系での直線は、s を媒介変数として、s の変化に対し
v k = dxk /ds が一定という条件で記述できる。
δv k
=0
ds
この左辺を変形してみよう。
δv k
dv k + Γkmn v m dxn
dv k
=
=
+ Γkmn v m v n = 0
ds
ds
ds
この式は前出の式 3.42 とまったく同じであり、接続係数を利用したベクト
ルの平行移動という概念が有効であることを示している。
[例 4.3] [二次元極座標系] 例 4.1 より、0 でない接続係数は Γφφr =
1/r、Γφrφ = 1/r、Γrφφ = −r の三つである。これから次の測地線方程
式が得られる。
dv r
− r vφ vφ = 0
ds
dv φ
2
+ vr vφ = 0
ds
r
(3.43)
この後式を r 2 倍すると、下記のように書き直すことができる。
d(r2 v φ )
=0
ds
これから α を定数として、
vφ =
α
r2
が得られる。
これを前式に代入し、両辺に 2v r を掛けると
2v r
dv r
α2
= 2 3 vr
ds
r
(3.44)
50
第 3 章 共変微分
d[(v r )2 ]
d(r−2 )
= −α2
ds
ds
これより
dr
v =
=
ds
√
r
β2 −
( α )2
r
v r を求めるにはもっと簡単な方法が知られている。それは線素の
式 ds2 = dr 2 + r 2 dφ2 を使うのである。この両辺を ds2 で割ると、
1 = (v r )2 + r2 (v φ )2 が得られるので、式 3.44 を代入して直ちに、前
式と同じ式が得られるだけでなく、積分定数も β = 1 と確定できる。
dr
v =
=
ds
√
r
1−
( α )2
r
(3.45)
両辺を逆数にして積分すると、
√
1−
r
( α )2
r
= s − s0
この式から逆に r を s の関数として得ることができる。
r=
√
α2 + (s − s0 )2
(3.46)
さらに、この結果を式 3.44 に代入すると、
vφ =
dφ
α
= 2
ds
α + (s − s0 )2
両辺を積分すると、次の結果が得られる。
tan(φ − φ0 ) =
1
(s − s0 )
α
式 3.46 と 3.47 より
r = α sec(φ − φ0 )
となり、任意の直線が測地線であることがわかる。
(3.47)
3.6 測地線
51
[例 4.4] [球面座標系] 例 4.2 より、0 でない接続係数は Γφφθ =
cos θ/ sin θ、Γφθφ = cos θ/ sin θ、Γθφφ = − sin θ cos θ の三つである。
これから次の測地線方程式が得られる。式 3.42 に上記 Γkmn を代入
する。
dv θ
− sin θ cos θ (v φ )2 = 0
ds
dv φ
+ 2 cot θ v θ v φ = 0
ds
(3.48)
この微分方程式を解けば、測地線が得らえる。まず下の式を sin2 θ 倍
すると、下記のように書き直すことができる。
d(sin2 θ v φ )
=0
ds
これから α を定数として、
vφ =
α
sin2 θ
(3.49)
が得られる。
これを前式に代入し、両辺に 2v θ を掛けることから v θ を求め
ることもできるが、前問のように、線素の式を利用して解こう。
ds2 = a2 dθ2 + a2 sin2 θdφ2 であるので、1 = a2 (v θ )2 + a2 sin2 θ(v φ )2
が成立する。これに式 3.49 を代入すると、
dθ
v =
=
ds
θ
√
( α )2
1
−
a2
sin θ
両辺を逆数にして積分すると、
a cos−1
(
√
cos θ
1 − a2 α2
)
= s − s0
この式から逆に θ を s の関数として得ることができる。
cos θ =
√
1 − a2 α2 cos[(s − s0 )/a]
(3.50)
52
第 3 章 共変微分
さらに、この結果を式 3.49 に代入すると、
vφ =
dφ
α
=
ds
1 − (1 − a2 α2 ) cos2 [(s − s0 )/a]
積分して両辺の tan をとると、次の結果が得られる。
tan(φ − φ0 ) =
tan[(s − s0 )/a]
aα
(3.51)
式 3.50 と 3.51 から (x, y, z) を求めると、測地線が任意の大円で
あることが示される。XY 面に置かれた大円 X = a cos[(s − s0 )/a]、
Y = a sin[(s − s0 )/a] を Y 軸を中心に −θ0 傾けてみよう。
x = a cos θ0 cos[(s − s0 )/a]
y = a sin[(s − s0 )/a]
z = a sin θ0 cos[(s − s0 )/a]
これらを球面座標系に変換すると、
z
= sin θ0 cos[(s − s0 )/a]
a
y
1
tan φ = =
tan[(s − s0 )/a]
x
cos θ0
cos θ =
さらに、φ 方向に φ0 回転してやると、上式の φ を φ − φ0 に置き換え
ればよい。つまり、a α = cos θ0 とすると、これらの式は、式 3.50 お
よび 3.51 に一致するので、大円であることが証明できた。
53
第4章
曲率
球面座標系などを見てみると、地表はほぼ平面に見えることから、局所的
には平行移動の概念は成立しても、大局的には成立していない。例えば地球
の表面で、赤道上の東経 0◦ の位置で南極方向を向いた自然基底 eθ を考え
る。これを球面内に拘束したまま、平行に北極まで移動すると、東経 0◦ に
沿って南極の方を向いたベクトル eθ となる。さらに、そのベクトルを平行
に赤道上の東経 90◦ の位置まで移動すると、赤道に沿って西を向いたベク
トル −eφ となる。さらにそれを、平行に元の位置まで戻しても −eφ のまま
で、元のベクトルと直交する。
つまり、リーマン幾何学では、大局的な平行の概念は存在しない。こうし
た現象は、ベクトル移動の際の dxm の一次の微小量まで見ても説明できず、
二次の微小量まで調べないと明かにできない。そこで、本章は二次微分の話
である。
54
第4章
曲率
4.1 ベクトル場の二階共変微分商
ベクトル場の二階の共変微分商を、テンソルの共変微分商に注意して計算
してみよう。
m
▽k (▽l An ) = ▽k (∂l An + Γn
lm A )
=(∂kl An + (∂k Γnlm ) Am + Γnlm ∂k Am )
+ Γnki (∂l Ai + Γilm Am ) − Γikl (∂i An + Γnim Am )
と、あまり美しくない式が得られる。そこで、この共変微分記号の順番を入
れ替えたものを求めよう。
m
n
m
▽l (▽k An ) =(∂lk An + (∂l Γn
km ) A + Γkm ∂l A )
+ Γnli (∂k Ai + Γikm Am ) − Γilk (∂i An + Γnim Am )
これらの差をとると多くの項が相殺し、比較的美しい式が得られる。
n
[▽k , ▽l ] An = ▽k ▽l An − ▽l ▽k An = Rm,kl
Am
(4.1)
左辺の中括弧は交換子と呼ばれるもので、演算子を入れ替えて差をとること
n
n
を示す。ただし、Rm,kl
は次式で与えられる量である。Rm,kl
のサッフィク
スのコンマは省いて記載されることも多いが、k, l が一体となることが多い
ので本書では入れた。
n
Rm,kl
= Λnm,kl − Λnm,lk
= (∂k Γnlm + Γnki Γilm ) − (∂l Γnkm + Γnli Γikm )
(4.2)
ここで、
Λnm,kl = ∂k Γnlm + Γnki Γilm
(4.3)
であるが、Λn
m,kl は特に本書でのみ導入した非テンソル量である。
n
Rm,kl
はリーマン・クリストッフェル曲率テンソル (Riemann Christof-
fel curvature tensor)、略して曲率テンソル (curvature tensor) と呼
4.1 ベクトル場の二階共変微分商
55
ばれる。何故テンソルであるかというと、式 4.1 の左辺の反変ベクトルの共
変微分はテンソル、その共変微分もテンソル、それらの差もテンソルであ
n
り、さらに右辺で、テンソルの商法則より Rm,kl
はテンソルであるからであ
る。共変微分記号の交換子は後に述べるように、微小ループに沿うベクトル
の平行移動と深い関係にある。そこで、曲率テンソルの定義はこの程度にし
て、話を先に進めよう。
[例 5.1] [二次元極座標系] 二次元極座標系の接続係数を再掲して
おこう。次の 3 項目を除いて残りは 0 である。
Γrφφ = −r
Γφrφ = Γφφr = 1/r
(4.4)
m
曲率テンソル Rn,kl
は、m と n が異なり、k と l が異なる場合しか
存在しない。
r
r
Rφ,rφ
= −Rφ,φr
= ∂r Γrφφ − ∂φ Γrφr = −1
φ
φ
Rr,rφ
= −Rr,φr
= ∂r Γφrφ − ∂φ Γφrr = −1/r2
(4.5)
[例 5.2] [球面座標系] 球面座標系でも接続係数は次の 3 項目を除
いて 0 である。
Γθφφ = − sin θ cos θ
Γφθφ = Γφφθ = cot θ
(4.6)
n
曲率テンソル Rm,kl
は、m と n が異なり、k と l が異なる場合しか
存在しない。
φ
θ
Rφ,θφ
= −Rθ,θφ
= ∂θ Γθφφ − ∂φ Γθφθ = sin2 θ − cos2 θ = 1
φ
θ
Rθ,φθ
= −Rφ,θφ
= ∂θ Γφθφ − ∂φ Γφθθ = sin2 θ
(4.7)
56
第4章
曲率
4.2 基底のループに沿う移動
本章の最初に述べたように、基底を任意のループに沿って平行移動する
と、その結果は元の基底とは異なる。ループとして二つの微小ベクトルで定
義される小さな四辺形を選ぶと、一周した結果は元のベクトルと微小ベクト
ルの長さの二次の効果分ずれてくる。このため、すべての微小量を二次の項
まで求めておこう。まず、移動の際には接続係数が現われるが、接続係数自
身が移動の際の一次変化に関する微係数的なものなので、さらにその一次
までの近似を求めておこう。x 点の近傍の点を x + dx = x + dxk ek とし
よう。
Γnml (x + dxk ek ) = Γnml (x) + dxk ∂k Γnml (x)
(4.8)
これを利用して、僅かに離れた点の自然基底が二次近似でどのように表現さ
れるか求めよう。まず接続係数を用いて、一次の微小量が得られる (式 3.9
の再掲)。
δem (x) = dxk Γnkm (x) en (x)
(4.9)
したがって二次の微小量は次のようになる。計算にあたり、三次以上の項は
無視している。
δ 2 em (x) = δem (x + dxk xk ) − δem (x)
0
=dxl Γnlm (x + dxk ek0 ) en (x + dxk ek ) − dxl Γnlm (x) en (x)
[
][
]
0
0
=dxl Γnlm (x) + dxk ∂k0 Γnlm (x) en (x) + dxk Γnkn (x) en0 (x)
− dxl Γnlm (x) en (x)
0
=dxk dxl ∂k Γnlm (x) en (x) + dxk dxl Γnkn (x) Γnlm (x) en0 (x)
=dxk dxl Λnm,kl en (x)
(4.10)
4.2 基底のループに沿う移動
57
ここで、式 4.3 で示した Λn
m,kl を利用している。 これよりテーラー展開を
利用して、次式が得られる。
[ n
]
e||m (x → x + dxk ek ) = δm
+ dxk Γnkm (x) + dxk dxl Λnm,kl /2 en (x)
(4.11)
次に、小さなほぼ平行四辺形 OP QR を考え、自然基底 em を O → P → Q
と平行移動したものと、O → R → Q と平行移動したものと差を見てみよ
う。先に結論を言ってしまうと、この二つには、平行四辺形の面積に比例し
た差が発生するのである。em を O → P → Q の順に平行移動した基底を
e||m (O, P )、e||m (O, P, Q)、O → R → Q 平行移動した基底を e||m (O, R)、
e||m (O, R, Q) と記載する。本当はすべての位置記号の間には (O → P ) な
どのように、→ を入れるべきであるが、式を縮めて記載するためにコンマ
とした。
平行四辺形の O 点の座標を x、P 点を xP = x + dal el (O)、Q 点が xQ =
xP + dbk ek (P )、R 点が xR = x + dak ek (O)、Q 点が xQ = xR + dbl el (R)
にあるとしよう。Q 点の定義が二種類あるが、これらはほとんど同じ値にな
る。また、Λn
m,kl などは、厳密には場所の関数であるが、その依存性は 4 次
の微小量なので、空間依存性は無視する。
まず、e||m (O, P ) は
]
[ n
+ dak Γnkm (O) + dak dal Λnm,kl /2 en (O)
e||m (O, P ) = δm
(4.12)
e||m (O, P, Q) はこの結果を利用して、
[ i
]
e||m (O, P, Q) = δm
+ dbk Γikm (P ) + dbk dbl Λim,kl /2 e||i (O, P )
]
[ i
+ dbk Γikm (O) + dbk dal ∂l Γikm (O) + dbk dbl Λim,kl /2
= δm
]
[
0
0
0
δin + dak Γnk0 i (O) + dak dal Λni,k0 l0 /2 en (O)
[ n
= δm
+ dbk Γnkm (O) + dal Γnlm (O)
]
+ dbk dbl Λnm,kl /2 + dbk dal Λnm,lk + dak dal Λnm,kl /2 en (O)
ここで式 4.3 を利用している。
58
第4章
曲率
同様に e||m (O, R, Q) は、上式の da と db を入れ替えればよいから、
[ n
e||m (O, R, Q) = δm
+ dak Γnkm (O) + dbl Γnlm (O)
]
+ dak dal Λnm,kl /2 + dak dbl Λnm,lk + dbk dbl Λnm,kl /2 en (O)
最後に、この二つの経路の差は
e||m (O, P, Q) − e||m (O, R, Q) =dak dbl (Λnm,kl − Λnm,lk en (O)
n
=dak dbl Rm,kl
en (O)
経路差の計算結果は、このループを O → P → Q → R → O と一周回った
ときの差とも一致する。これを単に (O, O) と書こう。
n
e||m (O, O) = dak dbl Rm,kl
en (O)
(4.13)
双対基底についても、同様な計算を行うことで、ループに沿う平行移動の
結果を計算することができる。
n
k
l m
em
|| (O, O) = da db Rn,kl e (O)
(4.14)
4.3 ベクトルのループに沿う移動
m
一般のベクトル A に対し、A = Am
|| (O, O) e||m (O, O) = A (O) em (O)
なので、
m
k
l n
A =Am
|| (O, O) e||m (O, O) = A|| (O, O) (em (O) − da db Rm,kl en (O))
m
k
l n
=Am
|| (O, O) em (O) − da db Rm,kl A|| (O, O) en (O)
( = Am (O) em (O) )
これより、括弧内の等号の両辺に共役の単位ベクトルを掛けると次式が得ら
れる。
m
k
l m
n
Am
|| (O, O) = A (O) + da db Rn,kl A (O)
(4.15)
4.3 ベクトルのループに沿う移動
59
n
ただし、An
|| (O, O) を四次の微小量を無視して A (O) に置き換えている。つ
まり、上付きサフィックスを有する反変ベクトルと双対基底は共に正の補正
を受ける。
同様な手法により、
n
A||m (O, O) = Am (O) − dak dbl Rm,kl
An (O)
(4.16)
が得られる。つまり、下付きサフィックスを有する共変ベクトルと自然基底
は共に負の補正を受ける。
ここで、ループに沿った微小移動が二階の共変微分商の交換子に繋がるこ
とを示そう。式 4.15 の左辺は次のように変形できる。
m
m
m
m
m
Am
|| (O, O) − A (O) = [A|| (O, O) − A|| (O, R)] + [A|| (O, R) − A|| (O, Q)]
m
m
m
+ [Am
|| (O, Q) − A|| (O, P )] + [A|| (O, P ) − A (O)]
= δAm (O, R) + δAm (R, Q) + δAm (Q, P ) + δAm (P, O)
= − ▽l Am (R) dbl − ▽k Am (Q) dak + ▽l Am (P ) dbl + ▽k Am (O) dak
= ▽k ▽l Am dak dbl − ▽l ▽k Am dak dbl
= [▽k , ▽l ] Am dak dbl
したがって、式 4.1 と同じ式が得られる。
m
[▽k , ▽l ] Am = Rn,kl
An
(4.17)
したがって、小さなループにおける平行移動が、二階共変微分商の交換子と
対応がとれていることが納得できよう。
同様に、共変成分の二階共変微分商の交換子についても次式が得られる。
n
An
[▽k , ▽l ] Am = −Rm,kl
(4.18)
これらのように、偏微分商は交換可能であるのに対し、共変微分商は一般に
交換不能である。
証明は省略するが、任意のテンソルに対する二階共変微分商の交換子につ
いても、上付きサッフィクスには正号が、下付きサッフィクスについては負
60
第4章
曲率
号がついた曲率テンソルが対応する。例えば、
n
i
[▽k , ▽l ] Anm = Ri,kl
Aim − Rm,kl
Ani
これをリッチの公式 (Ricci formula) と呼ぶ。
4.4 曲率テンソルの対称性
曲率を降階して得られる
i
Rmn,kl = gmi Rn,kl
(4.19)
も曲率テンソルと呼ばれる。
曲率にはいくつかの対称性がある。
1. 後 半 の サ フ ィ ッ ク ス の 入 替 に 関 す る反 対 称 性 (antisymmetricity)。
m
m
Rn,kl
= − Rn,lk
Rmn,kl = − Rmn,lk
(上式を降階したもの)
(4.20)
2. 前 半 の サ フ ィ ッ ク ス の 入 替 に 関 す る反 対 称 性 (antisymmetricity)。
Rmn,kl = −Rnm,kl
(4.21)
3. 前半と後半のサフィックスの入替に関する交換対称性 (commutation)。
Rmn,kl = Rkl,mn
(4.22)
これらの証明は囲みに示す。
式 4.20 の証明: 曲率テンソルの定義式 4.2 が交換子で定義されて
いるため、その一般的性質である。
4.4 曲率テンソルの対称性
61
式 4.21 の証明: リッチの公式を使って、計量テンソルの二階微分
の交換子を計算してみよう。
i
i
[▽k , ▽l ] gmn = − Rm,kl
gin − Rn,kl
gmi
= − Rnm,kl − Rmn,kl
計量テンソルの共変微分は 0 であるから、左辺は 0 なので、証明終り。
式 4.22 の証明: 曲率テンソルの定義式 4.2 の n, k, l を循環入替し
た三つの式を加え合せると、接続係数の対称性を使って第一ビアンキ
恒等式 (Biannki equation) と呼ばれる次式が得られる。
n
n
n
Rm,kl
+ Rk,lm
+ Rl,mk
=0
(4.23)
さらにこれを降階すると、
Rnm,kl + Rnk,lm + Rnl,mk = 0
式 4.22 は、これに式 4.20 と式 4.21 を適用して得られる等価な式で
ある。上式のすべての項で n と m を入れ替える。
Rmn,kl + Rmk,ln + Rml,nk = 0
これら二式を加えると、前半サフィックスの反対称性より第一項が消
滅する。
Rnk,lm + Rnl,mk + Rmk,ln + Rml,nk = 0
すべての項の前半サフィックス入替を行うと、
−Rkn,lm − Rln,mk − Rkm,ln − Rlm,nk = 0
この両側を循環する式で置き換えると、
Rkl,mn + Rkm,nl − Rln,mk − Rkm,ln + Rln,km + Rlk,mn = 0
62
第4章
曲率
第 4 項および第 5 項の後半サフィックス入替を行い、第一項と最終項
を前半サフィックス反対称性を利用して消去し、全体を 2 で割ると、
Rkm,ln − Rln,mk = 0
が得られ、証明が終了する。
4.5 リッチテンソル、スカラー曲率とアインシュタ
インテンソル
以上で、いわゆるリーマン幾何学の説明は終りであるが、最後に一般相対
性理論でしばしば用いられるいくつかの概念を導入しよう。
まず、曲率テンソルを次のように縮約したテンソルをリッチテンソル
(Ricci tensor) と呼ぶ。
l
Rmk = Rm,kl
(4.24)
さらに、これを縮約したものをスカラー曲率 (scalar curvature) と呼ぶ。
l
R = g mk Rmk = g mk Rm,kl
(4.25)
続いてアインシュタインテンソル (Einstein tensor)Gik を導入しよう。
これは次式によって定義される。
Gij = Rij −
1 ij
g R
2
(4.26)
式からわかるように、昇階されたリッチテンソルから計量テンソルの比例項
を引いただけなので、一種の曲率テンソルである。しかし、曲率テンソルと
異なりアインシュタインテンソルの共変微分は 0 となる。
▽i Gij = 0
(4.27)
この性質を利用して、一般相対性理論に利用される。これらの式の導出に興
味のある人は、囲みを見てほしい。
4.5 リッチテンソル、スカラー曲率とアインシュタインテンソル
63
まず、曲率テンソルの微分商に対し、次式で表わされる第二ビアン
キ恒等式、あるいは単にビアンキ恒等式 (Biannki equation) と呼
ばれる対称性が成立する。
n
n
n
▽i Rm,kl
+ ▽k Rm,li
+ ▽l Rm,ik
=0
(4.28)
あるいは、同じ式であるが、次式の表現の方が見易いかも知れない。
n
n
n
Rm,kl;i
+ Rm,li;k
+ Rm,ik;l
=0
(4.29)
この式の証明は以下のようである。
[▽i , [▽k , ▽l ]] Am を計算してみよう。まず、交換子を曲率テンソ
ルに変換せず、そのまま共変微分の形のままで計算してみよう。
[▽i , [▽k , ▽l ]] Am = ▽i [▽k , ▽l ] Am − [▽k , ▽l ] ▽i Am
= ▽i ▽k ▽l Am − ▽i ▽l ▽k Am − ▽k ▽l ▽i Am + ▽l ▽k ▽i Am
ここで、i, k, l を循環して三つの式を加えると、その結果は 0 となる
ことがわかる。
次に [▽i , [▽k , ▽l ]] Am を、交換子を積極的に曲率テンソルへ直し
ながら変形する。
[▽i , [▽k , ▽l ]] Am = ▽i [▽k , ▽l ] Am − [▽k , ▽l ] ▽i Am
n
n
n
▽n Am
▽i An − Ri,kl
An ) − Rm,kl
= − ▽i (Rm,kl
n
n
= −(▽i Rm,kl
) An − Ri,kl
▽n Am
ここで、最初の等号の後の第二項の変形は、▽i Am を二階のテンソ
ルとして、リッチの公式を適用する。この式の i, k, l を循環して三つ
の式を加えた結果は、前半で示したように 0 となるから、次式が得ら
れる。
n
n
n
) An
(▽i Rm,kl
+ ▽k Rm,li
+ ▽l Rm,ik
n
n
n
+ (Ri,kl
+ Rk,li
+ Rl,ik
) ▽n Am = 0
64
第4章
曲率
第二項は式 4.23 を利用して 0 となるから、ベクトル An の任意性を
利用して、証明が完了する。
続いてアインシュタインテンソルを導出しよう。ビアンキ恒等式に
gnl
を掛ける。計量テンソルの共変微分は 0 であるので、これを共変
微分の内部に入れても構わない。
n
n
n
▽i (gnl Rm,kl
) + ▽k (gnl Rm,li
) + ▽l (gnl Rm,ik
)=0
このうち、第一項と二項は縮約になっていて、リッチテンソルに置き
換る。また第三項は単純なサフィックスの置き換えになる。
l
▽i Rmk − ▽k Rmi + ▽l Rm,ik
=0
さらに g mi g kj を掛けて昇階してみよう。
▽i Rij − ▽k g kj R + ▽l Rlj = 0
第二項にはスカラー曲率が現われる。第二項は k → i、第三項は l → i
と置き換え、すべてを ▽i に統一すると、次の関係式が得られ、証明
が終了する。
(
▽i
1
R − g ij R
2
)
ij
= ▽i Gij = 0
m
[例 5.3] [二次元極座標系] 曲率テンソル Rn,kl
は、m と n が異な
り、k と l が異なる場合しか存在しない。
r
r
Rφ,rφ
= −Rφ,φr
= ∂r Γrφφ − ∂φ Γrφr = −1
φ
φ
Rr,rφ
= −Rr,φr
= ∂r Γφrφ − ∂φ Γφrr = −1/r2
したがって、リッチテンソルは
φ
r
Rrr = Rr,rr
+ Rr,φr
= 1/r2
Rrφ = Rφr = 0
φ
r
Rφφ = Rφ,rφ
+ Rφ,φφ
= −1
(4.30)
4.5 リッチテンソル、スカラー曲率とアインシュタインテンソル
65
より、
(
({Rmn }) =
1/r2
0
0
−1
)
(4.31)
これを昇階すると
(
n
({Rm
})
=
1/r2
0
0
−1/r2
1/r2
0
0
−1/r4
)
(4.32)
さらに昇階すると、
(
({Rmn }) =
)
(4.33)
スカラー曲率は
R = Rrr + Rφφ = 0
(4.34)
つまり、実は曲っていない空間であることがわかる。
スカラー曲率が 0 であるので、アインシュタインテンソルはリッチ
テンソルと一致し、
(
({G
mn
}) =
1/r2
0
0
−1/r4
)
(4.35)
n
[例 5.4] [球面座標系] 曲率テンソル Rm,kl
は、m と n が異なり、
k と l が異なる場合しか存在しない。
φ
θ
= −Rθ,θφ
= ∂θ Γθφφ − ∂φ Γθφθ = sin2 θ − cos2 θ = 1
Rφ,θφ
φ
θ
Rθ,φθ
= −Rφ,θφ
= ∂θ Γφθφ − ∂φ Γφθθ = sin2 θ
したがって、リッチテンソルは
φ
θ
+ Rθ,φθ
Rθθ = Rθ,θθ
= sin2 θ
Rθφ = Rφθ = 0
φ
θ
Rφφ = Rφ,θφ
+ Rφ,φφ
=1
(4.36)
66
第4章
曲率
より、
(
({Rmn }) =
sin2 θ
0
0
1
)
(4.37)
これを昇階すると
n
({Rm
})
1
= 2
a
(
sin2 θ
0
0
1/ sin2 θ
sin2 θ
0
0
1/ sin4 θ
)
(4.38)
さらに昇階すると、
({R
mn
1
}) = 4
a
(
)
(4.39)
スカラー曲率は
R = Rθθ + Rφφ = [sin2 θ + (1/ sin2 θ)]/a2
(4.40)
つまり、実際に曲っている空間であることがわかる。
アインシュタインテンソルは、
({Gmn }) =
1 − (1/ sin4 θ)
2a4
(
sin2 θ
0
0
−1
)
(4.41)
67
第5章
空間微分演算子
電磁気学でよく出現する grad、div、rot といった空間微分演算子は曲線
座標系でどのような形になるのであろうか。これらの算出方法を示す。
5.1 接続係数の計算
まず接続係数に関する二つの公式を示しておこう。接続係数を直接算定す
るのは、項目が多く、結構面倒であるが、g を gmn を要素とする行列式と
して、
dg = dgmn g mn g
(5.1)
の関係があることを利用して誘導される次の二式を使うと計算が簡単になる
ことが多い。
(√ lk )
1
Γkmn g mn = − √ ∂l
gg
g
(5.2)
1
√
Γm
mn = √ ∂m g
g
(5.3)
√
なお、g が負となる場合は、 g の代わりに
√
−g を用いる。
68
第5章
空間微分演算子
式 5.1 の証明から始めよう。また、三次元空間での証明を行うが、
これと同じ方法で、もっと多次元空間の証明ができることを認識して
ほしい。
g11 g12 g13 dg = d g21 g22 g23 g31 g32 g33 dg11 g12 g13 g11 dg12 g13 g11
= dg21 g22 g23 + g21 dg22 g23 + g21
dg31 g32 g33 g31 dg32 g33 g31
g12 g13 g22 g23 + ···
− dg21 = dg11 g32 g33 g32 g33 g12
g22
g32
dg13 dg23 dg33 = (dg11 g 11 + dg21 g 21 + dg31 g 31 ) g + · · · + · · ·
= dgmn g mn g
となり、与式が得られる。ここで、下から二番目の等号であるが、
g22
g32
1
g23 = 0
g33 0
g12
g22
g32
g13 g 11 g11
g23 = g 11 g21
g33 g 11 g31
g12
g22
g32
g13 g23 = g 11 g
g33 などの式を利用して変形した。
式 5.2 の証明は以下のようである。
1 mn kl
(g g ∂m gln + g mn g kl ∂n gml − g mn g kl ∂l gmn )
2
1
= g mn g kl ∂m gln − g mn g kl ∂l gmn
2
∂
g
1
l
= −∂l g lk − g kl
2
g
(√ lk )
1
= − √ ∂l
gg
g
Γkmn g mn =
このうち二番目の等号は、その前の式の第二項で m, n を入れ替えて、
第一項と同じ形として 2 倍している。また三番目の等号後の前項は
5.2 空間微分演算子
69
g mn ∂n (g kl gln ) = g mn ∂n δnk = 0 の左辺を部分微分することにより得
られる ∂n g km + g mn g kl ∂n gln = 0 を利用して変更した。また後項は
式 5.1 を利用した。
同様に式 5.3 の証明は以下のようになる。
Γm
mn =
1 ml
1
g (∂m gln + ∂n gml − ∂l gmn ) = g ml ∂n gml
2
2
1 ∂m g
1
√
=
= √ ∂n g
2 g
g
このうち二番目の等号は、その前の式の第三項で m, n を入れ替えて、
第一項と同じ形として相殺している。三番目の等号は式 5.1 を利用
した。
5.2 空間微分演算子
まず grad であるが、デカルト座標系では以下のように定義されている。
ただし、本節ではデカルト座標系と曲線座標系の次元数は等しいとする。
grad f = ∂M f eM = ∂M f g M N eN
(5.4)
これを座標変換すると次のようになる。
∂M f g M N eN = (∂M xm ∂m f ) (∂m xM g mn ∂n xN ) (en ∂N xn )
= ∂m f g mn en
(5.5)
と、曲線座標系においてもデカルト座標系と同じような形に変換されるの
で、これでよいことがわかる。
grad f = ∂m f g mn en
(5.6)
(grad f )n = ∂m f g mn
(5.7)
あるいは
70
第5章
空間微分演算子
div A はデカルト座標系において ∂M AM であるが、これを変換すると、
本節で述べたように同じような形とはならない。結局、▽M AM を変換する
のがよい。ただし、この式は、デカルト座標系では ∂M AM と同じ値をとる。
曲線座標系では次のように、接続係数を必要とする。これを式 5.3 を使って
書き直す。
k
div A = ▽m Am = ∂m Am + Γm
mk A
1
√
= ∂m Am + √ (∂k g) Ak
g
1
√ m
= √ ∂m ( g A )
g
(5.8)
rot A はデカルト座標系において、次のように定義されている。
rot A = M N K ∂M AN eK
(5.9)
ここで、M N K は完全反対称テンソルである。つまり、N, M, K が 1, 2, 3
の偶置換である場合に 1、奇置換である場合に −1、それ以外は 0 という量
である。まず、この変換則を調べておこう。例えば、mnk を変換してみよ
う。なお、行列式中のサフィックス 1, 2, 3 は m, n, k のとる値である。
∂m xM ∂n xN ∂k xK mnk
∂1 xM
= ∂2 xM
∂ xM
3
∂1 xN
∂2 xN
∂3 xN
∂1 xK ∂2 xK ∂3 xK (5.10)
(N, M, K) が (1, 2, 3) の偶置換の場合、右辺は ∂m xM の作る行列式 J =
|{∂m xM }| になる。奇置換の場合、右辺は −J になり、それ以外の場合、右
辺は 0 となる。つまり M N L の J 倍になる。
∂m xM ∂n xN ∂k xK mnk = J M N L
(5.11)
これから mnk /J がテンソルとなることがわかる。∂M AN の変換も共変微
分に変更する必要があり、接続係数を必要とする。この結果、次の式が得ら
5.3 直交曲線座標系における空間微分演算子
71
れる。
rot A =
1 mnk
1
▽m An ek = mnk (∂m An − Γlmn Al ) ek
J
J
(5.12)
しかし、この式で mnk Γlmn は m, n が mnk に対し反対称なのと Γlmn に対
し対称であることから、自己消去する。そこで、次式が得られる。
rot A =
1 mnk
∂m An ek
J
(5.13)
1 mnk
∂m An
J
(5.14)
あるいは、
(rot A)k =
2
最後にラプラシアンを扱おう。証明は略すが、▽ f が不変量となるため
には、共変微分を使った次式のような形でなければならない。
2
▽ f = g mn ▽m ▽n f = g mn ∂mn f + Γkmn g mn ∂k f
(5.15)
2
これから、式変形をしていくことも可能であるが、▽ f = div(grad f ) を利
用し、div A の変換式に A = grad f の変換式を代入する方が簡単である。
2
1
g
√
▽ f = div (grad f ) = √ ∂m ( g g mn ∂n f )
(5.16)
5.3 直交曲線座標系における空間微分演算子
5.3.1 スケール因子
一般に基底の長さは 1 とは限らないが、長さ 1 の単位ベクトル (unit
vector) の方がわかりやすい。そこで、基底 em と同じ方向を持つ単位ベク
トル um を考える。
em = h m u m
(5.17)
72
第5章
空間微分演算子
ここで、hm は基底の長さであり、スケール因子 (scale factor) と呼ばれ
る。また、本節ではアインシュタイン規約は用いないものとする。これよ
り、線素ベクトルは次のようになる。
ds =
∑
dxm em =
m
∑
dxm hm um
(5.18)
m
多くの実用的な曲線座標系では、自然基底が互いに直交しており、直交
曲線座標系 (orthogonal curvilinear coordinate system) となってい
る。このような場合には
um · un = δmn
(5.19)
が成立するので、線素は次式のようになる。
ds2 =
∑
dxm dxn em · en =
mn
∑
dxm dxn hm hn um · un
mn
=
∑
dxm dxn hm hn δmn
(5.20)
mn
したがって計量テンソルは次式で与えられる。
gmn = h2m δmn
(5.21)
また逆に、逆に次式が成立する。
hm =
√
gmm
(5.22)
双対基底 em は em と同じ方向を持つ。um = um としてみよう。直交曲
線座標系では、この結果、um も互いに直交する長さ 1 の正規直交基底とな
る。つまり、um は自己双対である。ここで、双対基底を em = (1/hm ) um
としてみよう。すると、
g mm = em · en =
1 m 1 n
1
u ·
u = 2 δ mn
hm
hn
hm
(5.23)
となり、確かに双対座標系の条件を満足している。これらの結果、em 、um 、
um 、em はすべて同じ方向で、長さが hm 、1、1、1/hm のベクトルである。
5.3 直交曲線座標系における空間微分演算子
73
u
同様に、ベクトルの成分 Am 、Am
u 、Am 、Am は、長さが 1/hm 、1、1、hm
u
m
の比になる。ただし、Am
u 、Am は um 、u を基底としたときのベクトルの
長さである。em を用いると線素ベクトルは次のようになる。
ds =
∑
dxm em =
m
∑
dxm
m
1 m
u
hm
(5.24)
さらに、前式の二乗長を求めると、線素は次式で与えられる。
ds2 =
∑
g mm (dxm )2 =
m
∑ ( dxm )2
m
hm
(5.25)
なお、多くの曲線座標系の変換の議論はデカルト座標を基礎とするが、デ
カルト座標では gM N = δM N であるので、以下の式で計算することがで
きる。
gmn =
∑
∂m xM ∂n xM
(gM N = δM N の場合)
(5.26)
M
また、J = |{∂m xM }| であるから、
|{gmn }| = |{∂m xM }| |{∂n xM }| = J 2 となる。さらに直交曲線座標系では
gmn は非対角要素を有しないため、次式が成立する。
√
∏
∏
√
J = |{gmm }| =
gmm =
hm
(直交曲線座標系の場合)
m
m
(5.27)
一般の曲線座標系での grad、div、rot といった微分演算がどのような形
になるかは前節で詳しく述べたが、実用的には、直交曲線座標系での形がし
ばしば必要となることが多い。
こうした計算でもっとも面倒なのは、目標座標系におけるベクトルの成分
と言った場合、今迄は em を基底とした Am を指したが、本節で成分と言っ
た場合は、em 方向の実の長さを示していることである。つまり、um を基
底とした成分である。これを、今迄の共変成分 Am に対して、Am
u を物理成
74
第5章
空間微分演算子
分 (physical component) という。式で表現すると、次式のようになる。
A = Am em = Am
u um
(5.28)
em = hm um であるので、成分に対しては、次式が成立する。
Am = Am
u /hm
(5.29)
同様に em = um /hm であるので、成分に対しては、次式が成立する。
Am = Aum hm
(5.30)
なお、以下にもこのように hm が入ってくる式が現われるが、これらはす
べてアインシュタイン規約ではないので注意して欲しい。hm が入って、さ
らに総和記号が必要なところは、その都度、総和記号を記載することとする。
[例 6.1]
0
特殊相対性理論の際の座標変換であるが、x = 0 と
0
x = −V t が対応することから、β = V /c として、
x = x0 + β ct0
ct = ct0 + Dx0
という形からスタートできないだろうか。線素は
ds2 = dx2 − d(ct)2 = dx02 + 2β dx0 d(ct0 ) + β 2 d(ct0 )2
− d(ct0 )2 − 2D dx0 d(ct0 ) − D2 dx02
となる。まず、これが直交曲線座標系となるように D = β とすると、
ds2 = (1 − β 2 ) dx02 − (1 − β 2 ) d(ct0 )2
つまり、(x0 , ct0 ) 系の計量テンソルを、
({gµ0 ν 0 }) =
(
1 − β2
0
0
−(1 − β 2 )
)
(5.31)
5.3 直交曲線座標系における空間微分演算子
75
√
1 − β 2 とすれば、自
としたことになる。そこで、hx0 = hct0 =
然基底は正規化される (ミンコウィスキー空間であるため、厳密に
0
0
0
µ
は、ct 成分の二乗長は負のまま)。xµ = xµ
u /hµ0 = γ xu とすると、
0
(xµu ) = (x0u , ct0u ) は、通常の特殊相対性理論で使われる (x0 , ct0 ) と
なる。
5.3.2 勾配
grad f を計算するには、前節に示した grad f = ∂m f g mn en へ em =
hm um を代入する。
grad f =
∑
∂m f g mn hn un =
n
∑
∂m f
m
1
um
hm
(5.32)
この結果、次式が得られる。
(grad f )m =
∂f 1
∂xm hm
(5.33)
5.3.3 発散
発散については、前節の div A =
∑
m
√
√
∂m ( g Am )/ g を利用する。
(
)
∑ 1
√ Am
u
div A =
g
√ ∂m
g
hm
m
(
)
1
∂(h2 h3 A1u ) ∂(h3 h1 A2u ) ∂(h1 h2 A3u )
=
+
+
(5.34)
h1 h2 h3
∂x1
∂x2
∂x3
5.3.4 回転
回転についても、前節の定義を利用する。
rot A =
1 mnk
∂m An ek
J
(5.35)
76
第5章
空間微分演算子
ここで、右辺各項を書き直すと次式が得られる。
rot A =
∑
∂(hn Aun )
1
mnk
hk u k
h1 h2 h3
∂xm
(5.36)
mnk
(rot A)k を求めるには、右辺から uk を外せばよい。また、Aun = Anu であ
るので、A の n 方向の成分の実の長さである。
5.3.5 ラプラシアン
最後にラプラシアンであるが、前節の
√
2
√
▽ f = ∂m ( g g mn ∂n f ) / g を利用する。
2
▽ f =
1
1
∂m (h1 h2 h3 g mn ∂n f ) =
(5.37)
h1 h2 h3
h1 h2 h3
[
(
)
(
)
(
)]
∂
∂
∂
h2 h3 ∂f
h3 h1 ∂f
h1 h2 ∂f
+ 2
+ 3
∂x1
h1 ∂x1
∂x
h2 ∂x2
∂x
h3 ∂x3
以下、代表的な直交曲線座標系に対し、今迄調べたことを示していこう。
[例 6.2] [二次元極座標系] 計量係数は
(
)
1 0
({gmn }) =
0 r2
であるので、
g = r2
J=
√
g=r
(
)
({hm }) = 1 r
(5.38)
5.3 直交曲線座標系における空間微分演算子
77
これらの結果を利用して、各種微分演算を求めることができる。
1
grad f = ∂r f ur + ∂φ f uφ
r
(
)
1 ∂(r Aru ) ∂Aφu
div A =
+
r
∂r
∂φ
( φ
)
1 ∂Au
∂(r Aru )
rot A =
−
r
∂r
∂φ
[ (
)
(
)]
∂f
∂ 1 ∂f
1 ∂
2
r
+
▽ f =
r ∂r
∂r
∂φ r ∂φ
(5.39)
(5.40)
(5.41)
(5.42)
二次元空間なので、rot A の計算では、h3 = 1、u3 = ur · uφ とした。
[例 6.3] [球面座標系]
({m}) = (θ, φ) として、
(
)
1
0
({gmn }) = a2
0 sin2 θ
(5.43)
これより、
g = a4 sin2 θ
J=
√
g = a2 sin θ
(
({hm }) = a
a sin θ
)
これらの結果を利用して、各種微分演算を求めることができる。
)
1
∂θ f uθ +
∂φ f uφ
sin θ
(
)
1
∂(sin θ Aθu ) ∂Aφu
div A =
+
a sin θ
∂θ
∂φ
(
)
φ
1
∂(sin θ Au ) ∂Aθu
rot A =
−
a sin θ
∂θ
∂φ
[ (
)
(
)]
1
∂
∂f
∂
1 ∂f
2
▽ f = 2
sin θ
+
a sin θ ∂θ
∂θ
∂φ sin θ ∂φ
1
grad f =
a
(
(5.44)
(5.45)
(5.46)
(5.47)
78
第5章
空間微分演算子
二次元空間なので、rot A の計算では、h3 = 1、u3 = uθ · uφ とした。
[例 6.4] [三次元極座標系] 三次元の極座標系の順変換に関る諸量
は以下のようである。
x = r sin θ cos φ
y = r sin θ sin φ
z = r cos θ
sin θ cos φ
sin θ sin φ
cos θ
({∂m xM }) = r cos θ cos φ r cos θ sin φ −r sin θ
−r sin θ sin φ r sin θ cos φ
0
1 0
({gmn }) = 0 r2
0 0
0
0
r2 sin2 θ
g = r4 sin2 θ
J=
√
g = r2 sin θ
(
({hm }) = 1 r
r sin θ
)
(5.48)
5.3 直交曲線座標系における空間微分演算子
79
各種微分演算は次のようになる。
∂f
1 ∂f
1
∂f
ur +
uθ +
uφ
(5.49)
∂r
r ∂θ
r sin θ ∂φ
(
)
1
∂(r2 sin θ Aru ) ∂(r sin θ Aθu ) ∂(r Aφu )
div A = 2
+
+
r sin θ
∂r
∂θ
∂φ
[
]
2 r
θ
φ
1 ∂(r Au )
1
∂(sin θ Au ) ∂Au
= 2
+
+
(5.50)
r
∂r
r sin θ
∂θ
∂φ
[(
)
1
∂(r sin θ Aφu ) ∂(r Aθu )
rot A = 2
−
ur
(5.51)
r sin θ
∂θ
∂φ
)
(
) ]
( r
∂(r sin θ Aφu )
∂(r Aθu ) ∂Aru
∂Au
−
uθ + r sin θ
−
uφ
+r
∂φ
∂r
∂r
∂θ
[ (
)
(
)
1
∂
∂f
∂
∂f
2
▽ f = 2
r2 sin θ
+
sin θ
r sin θ ∂r
∂r
∂θ
∂θ
(
)]
∂
1 ∂f
+
∂φ sin θ ∂φ
(
)
(
)
1 ∂
∂f
1
∂
∂f
1
∂2f
= 2
r2
+ 2
sin θ
+ 2 2
r ∂r
∂r
r sin θ ∂θ
∂θ
r sin θ ∂φ2
(5.52)
grad f =
[例 6.5] [円柱座標系] 三次元の円柱座標系の変換則は次式で与え
られる。
x = r cos φ
y = r sin φ
z=z
(5.53)
({m}) = (r, θ, z) として、
cos φ
sin φ 0
({∂m xM }) = −r sin φ r cos φ 0
0
0
1
1 0
({gmn }) = 0 r2
0 0
0
0
1
(5.54)
(5.55)
80
第5章
空間微分演算子
J = |{∂m xM }| = 1/r
(5.56)
(
({hm }) = 1
(5.57)
r
)
1
各種微分演算は次のようになる。
1 ∂f
∂f
∂f
ur +
uφ +
uz
∂r
r ∂φ
∂z
(
)
1 ∂(r Aru ) ∂Aφu
∂(r Azu )
div A =
+
+
r
∂r
∂φ
∂z
grad f =
(5.58)
1 ∂(r Aru ) 1 ∂Aφu
∂Azu
+
+
(5.59)
r
∂r
r ∂φ
∂z
[( z
)
1
∂Au
∂(r Aφu )
rot A =
−
ur
r
∂φ
∂z
( r
)
(
) ]
∂Au
∂Azu
∂(r Aφu ) ∂Aru
+r
−
uφ +
−
uz
∂z
∂r
∂r
∂φ
(5.60)
=
2
[ (
)
(
)
(
)]
1 ∂
∂f
∂ 1 ∂f
∂
∂f
r
+
+
r
r ∂r
∂r
∂φ r ∂φ
∂z
∂z
(
)
2
2
∂f
1 ∂ f
∂ f
1 ∂
r
+ 2
+ 2
(5.61)
=
r ∂r
∂r
r ∂φ2
∂z
▽ f =
81
第6章
一般相対性理論
リーマン幾何学と言えば、最大の応用分野は一般相対性理論である。本章
では、一般相対性理論に限って、リーマン幾何学について述べよう。
6.1 等価原理
一般相対性理論とは重力を扱う理論である。特殊相対性理論で、重要な電
磁気による力を扱っているのに、重力を扱わなかったのは、アインシュタイ
ンの心の中に、当初から重力は一般の力とは別であるという意識があったの
だと思われる。その主たる原因は、重力質量 mG と慣性質量 mI の一致であ
る。何故どんな質量の物体でも、同じ軌跡で落下するのであろうかという疑
問に対し、アインシュタインは、空間の構造に起因するから、こうなると考
えたのである。空間と言っても時間軸を含めた四次元空間である。
本稿をお読みの方はどなたも重力が F = mg で与えられ、ニュートンの
第二法則が F = ma で与えられていることをご存知であろう。しかし、こ
の二つの m が何故共通の値なのかを疑った人は意外に少いのではないだろ
うか。私も疑わなかった者の一人である。生活体験から、重いものや軽いも
のがあることは分っていたので F = mg は簡単に理解できる。一方、私は
ガリレーの落下実験や惑星の運動などから、何故、これらは質量に依らず
82
第6章
一般相対性理論
同じような軌跡を描くのだろうという疑問を感じたことはあった。そして、
F = ma の式を見て、なるほど、だから物体は質量に依らない運動をするの
だと納得してしまったのである。もちろん、その瞬間は何故同じ m を使う
のだろうという疑義は頭をよぎったのであるが、かなり早いうちにその疑問
は維持されることなく消え去ったという気がする。ここにこだわり続けたア
インシュタインは正に凄いとしか評価できない。
より具体的には、重力のある空間で、自由落下しているエレベーターを
考えると、その中では重力は感じられない。つまり、エレベータ内は慣性系
(inertial system) になっている。このエレベーター内にいる人間は、自
分が加速系にいて重力落下をしているのか、慣性系にいるのかを区別する
方法はない。また、エレベーター内で等速度運動をしているどんな質量の物
体も、外から見ると、すべて同じ加速度で落下しているように見える。つま
り、重力とはこれら二つの系の座標変換の結果、現われてくる量であると考
えたのである。エレベータの思考実験の結果、エレベータ内では光も直線運
動するはずである。ということは、重力のある系で観測すると、光も質量の
ある物質と同じように、放物線を描くことになる。光の落下が簡単には観測
できないのは、光が余りにも高速すぎて、落下量よりも水平移動距離の方が
著しく大きいからであろう。
さて、質量があろうとなかろうと重力の影響を受けるとすると、これは球
面座標系のように空間が歪んでいると理解する方が自然である。つまり物体
も光線もこの曲った空間の測地線に沿って移動しているだけではないだろ
うか。こうした大胆な仮説に基づいて、重力と空間歪の関係を求め、さらに
は重力の厳選である質量 (特殊相対性理論の結論から、質量というよりはエ
ネルギーと呼ぶ方がよい) と空間歪との関係を導出したものが、一般相対性
理論である。このように、適切な座標系を選ぶことで、特殊相対性理論が働
く慣性系 (inertial system) が得られることを、等価原理 (equivalence
principle) と呼ぶ。
等価原理とは、重力場のなかで、すべての物体が、質量に依存せず、同じ
重力加速度で運動することであるとも言える。そこで、等価原理の証明には
6.2 特殊相対性理論の概要
83
mG /mI が一定であることを実証すればよい。古くはガリレオのピサの斜塔
での自由落下実験があるが、より正確には振子の錘の質量を変える、あるい
は捻れの平衡などの方法がある。捻れの平衡について、若干説明しよう。地
上の質点には重力以外に遠心力のような加速力が働く。前者は mI に、後者
は mG に比例する。二つの異なる質点を用意し、この二つを棒で繋いで、適
切な位置に支点をとり、下向きに働く重力に対して平衡をとる。これらの質
点には地軸と垂直に加速力も働いているので、もし、重力質量と慣性質量に
差があると、加速力の方では平衡がとれないことになり、この天秤は回転を
初める。この回転のトルクを調べることにより、二つの質点の mG /mI に
差があるかを調べることができる。この実験の結果、現在 11 桁の確度で、
質量比は一定と言える。つまり、等価原理は成立している可能性が高いので
ある。
6.2 特殊相対性理論の概要
本書は相対性理論の書ではないため、極めて簡略に、特殊相対性理論
(special theory of relativity) の概要を紹介しておこう。
二つの慣性系 (inertial system) を考え、S0 系は S 系に対し、x 軸方向
に V の速度で移動しているとする。このとき、いずれの座標系でも光が同
じ c の速度を持つという条件と、両座標系の対等性から、次式の変換式が得
√
1 − β 2 )。
られる (β = V /c、γ = 1/
x0 = γ(x − βct),
y 0 = y,
z 0 = z,
ct0 = γ(ct − βx)
(6.1)
この変換で、次の量が不変量となることがわかる。
ds2 = −c2 dτ 2 = dx02 + dy 02 + dz 02 − d(ct0 )2
( = dx2 + dy 2 + dz 2 − d(ct)2 )
(6.2)
これが、慣性系における線素の定義である。一般の曲線座標系では ds を線
素とするが、相対論では dτ を線素とすることが多いため、両方を併記した。
84
第6章
一般相対性理論
この章では、(xm ) = (x1 , x2 , x3 , x4 ) = (x, y, z, (ct)) としよう。この結果、
計量テンソルに対し、次式が成立する。
1
0
({gµ0 ν 0 }) = ({gmn }) =
0
0
0
1
0
0
0 0
0 0
1 0
0 −1
(6.3)
となる。また、その逆行列から、次式も得られる。
0 0
g µ ν = g mn
(6.4)
言うまでもなく、この空間では、接続係数もリーマン曲率もすべて 0 となる。
四元速度 (four velocity) V m と呼ばれる相対論的速度を次のように定義
する。
(
({V }) =
m
dx
dτ
dy
dτ
dz
dτ
d(ct)
dτ
)
(6.5)
線素の式 6.2 の両辺を dτ 2 で割ることにより、次の不変量が得られる。
gmn V m V n = (V 4 )2 − (V 1 )2 − (V 2 )2 − (V 3 )2 = c2
(6.6)
以後、座標以外の四元量には数字のサフィッスクを付すものとする。これに
対し、古典量には x, y, z などのサフィックスを付すこととする。四元量と
古典量の間の変換には、しばしば dt/dτ が現われる。式 6.2 の両辺を d(ct)2
で除すことにより、次式が得られる。
dτ
=
dt
√
1−
√
1
(v x )2 + (v y )2 + (v z )2
= 1 − βv2 =
2
c
γv
(6.7)
ここで、βv 、γv は座標間の速度 V による β 、γ ではなく、質点そのものの
古典速度 v =
√
(v x )2 + (v y )2 + (v z )2 によるものであることを示している。
γv はおよそ 1 であるが、低速度近似では速度の二乗に比例して増加する。
この γv を用いると、
dx
dt dx
=
= γv v x
dτ
dτ dt
dz
dt dz
V3 =
=
= γv v z
dτ
dτ dt
V1 =
dy
dt dy
=
= γv v y
dτ
dτ dt
d(ct)
dt
V4 =
=c
= γv c
dτ
dτ
V2 =
(6.8)
6.2 特殊相対性理論の概要
85
などが得られる。
また、m0 を質点の静止質量として、四元運動量 (four momentum) P m
を次式で定義する。
(
({P m }) = m0 ({V m }) = m0
dx
dτ
dy
dτ
dz
dτ
d(ct)
dτ
)
(6.9)
これから、古典的運動量との関係は次式のようになる。
P 1 = γv px
P 2 = γv py
P 3 = γv pz
P 4 = γv m0 c
(6.10)
さて式 6.6 を τ で微分すると、
gmn V m
dV n
=0
dτ
という gmn V m (dV n /dτ ) が不変量であることが導かれる。さらにこれから
gmn V m P n = 0
となり、gmn V m P n も不変量であることが導かれる。これは、わざわざ証明
しなくても、座標変換において、スカラー量である内積は不変量であること
を知っていれば自明のことである。
運動量の第四要素 P 4 を少し変形してみよう。
P 4 = γv m0 c = m0 c √
1
1 − βv2
(
)
]
m0 [ x 2
+ m0 c 1 + βv2 /2 = m0 c +
(v ) + (v y )2 + (v z )2 (6.11)
2c
右辺第二項は運動エネルギーを c で除したものであるので、次式の成立する
可能性が高い。
E = cP 4
(6.12)
式 6.6 の両辺に (m0 c)2 を掛け、空間運動量の項を右へ移項することにより、
次式が得られる。
E 2 = (cP 4 )2 = (m0 c2 )2 + (cP 1 )2 + (cP 2 )2 + (cP 3 )2
(6.13)
86
第6章
一般相対性理論
この右辺をまとめて、(mc2 )2 と書くことがある。
E = mc2
(6.14)
m0 を静止質量 (static mass)、m を相対論的質量 (relativistic mass) と
呼ぶ。この場合、式 6.11 の両辺を c 倍し、最初の等号と、式 6.14 を比較す
ると、次式が得られる。
m = γv m0
(6.15)
が成立する。
四元力 (four force) が次式を満すものとしよう。
Fm =
dP m
dτ
(6.16)
これから直ちに V m F m が不変量であることがわかる。この両辺に dτ を掛
けると、
F 4 dct = −F 1 dx − F 2 dy − F z dz
が得られるが、右辺は古典的近似では明かにこの質点が受ける仕事量であ
る。つまり質点の持つエネルギーの変化ということになる。したがって左辺
の cF 4 は単位時間当りの質点のエネルギー増加率ということになる。式で
表すと、
F4 =
dE/c
dτ
両辺を τ で積分すると式 6.12 と矛盾しない結果が得られる。
本節では四元量が初めて登場したので、V m 、P m 、F m などと飾りフォン
トを用いたが、以後の節では、v m 、pm 、F m 、あるいは数字サフィックスに
より表すこととする。古典的量は x、y 、z をサフィックスとする。
6.3 エネルギー運動量テンソル
87
6.3 エネルギー運動量テンソル
エネルギー運動量テンソル (energy momentum tensor) の概念は特
殊相対性原理から導かれるが、一般相対性原理で重要な役割を演ずるため、
ここで説明しておこう。エネルギー運動量テンソルはまず電磁気学から確立
されたため、まずその議論を示そう。
ローレンツ力の四元化をしてみよう。
F = Q(E + v × B)
を四元化しようとすると、まず古典的速度 v が気になる。これを四元速度の
√
1 − v 2 /c2 ) 倍すればよさそうで
成分 v 1 , v 2 , v 3 にするには全体を γv (= 1/
ある (v は古典的速度の絶対値)。こうすると F 、v が四元速度になるだけで
なく、右辺第一項の γv E も、v 4 (E/c) と記載できるようになる。*1
ローレンツ力の式の両辺に v を内積として掛けてみよう。
F · v = Qv · E
これを γv /c 倍すると次式のように四元力の時間項となる。
F 4 = γv F · v/c = Q(v 1 Ex /c + v 2 Ey /c + v 3 Ez /c)
(6.17)
このように、四元力 F m を (γv F , γv F · v/c) とすると、ローレンツ力は
次にようにまとめることができる。
F m = QBnm v n
(6.18)
ただし、Bnm は電磁テンソル (electromagnetic tensor) と呼ばれ、次の
*1
古典的量はベクトルまたは x, y, z のサフィックスを付け、四元量は m や数字のサフィ
クスを付ける。
88
第6章
一般相対性理論
ように定義される。
0
Bz
−By Ex /c
−Bz
0
Bx Ey /c
({Bnm }) =
By
−Bx
0
Ez /c
Ex /c Ey /c Ez /c
0
(6.19)
第四行と四元速度の積は、式 6.17 に対応する。また、これから導かれる反
変テンソル B mn = Bkm g kn 、共変テンソル Bmn = gmk Bnk も、今後使われ
るので示しておこう。
0
Bz
−By −Ex /c
−Bz
0
Bx −Ey /c
({B mn }) =
By
−Bx
0
−Ez /c
Ex /c Ey /c Ez /c
0
(6.20)
この場合には第四列のみが符号反転している。
0
Bz
−By
−Bz
0
Bx
({Bmn }) =
By
−Bx
0
−Ex /c −Ey /c −Ez /c
Ex /c
Ey /c
Ez /c
0
(6.21)
この場合には第四行のみが符号反転している。B mn も Bmn も、反対称テン
ソルになっていることに注意してほしい。このように、反変テンソル、共変
テンソル、混合テンソルと複数存在するのは、やや面倒であるが、第四列か
第四行の符号が反転するだけであり、また式の変形に当たっても、計量テン
ソルを掛けるだけで簡単に変更できるので、慣れてほしい。
さて、このテンソルの各成分には電場や磁場の成分が入っているが、電場
や磁場は、相対論の世界では、どうやってもベクトルで表現することができ
ず、このように 4 × 4 のテンソルになってしまうのである。この後に現れる
ポテンシャルが、簡単なベクトルで表されることを考慮すると、ここでも、
ポテンシャルのほうが根源的な量であることを、感じざるを得ない。
電磁場を四元テンソルで表したが、マクスウェル方程式を、この電磁テン
ソルを使って表してみよう。電荷や電流などの源との関連の div E 式およ
6.3 エネルギー運動量テンソル
89
び rot B 式は、次のようになる。
∂m B mn = −µ0 J n
(6.22)
ただし、J n の成分は (J , cρ) である。一方、源の入っていない rot E 式お
よび div B 式は、やや複雑な表現で与えられる。
∂k Bmn + ∂m Bnk + ∂n Bkm = 0
(6.23)
ローレンツ力の座標変換を考えてみよう。この際、速度もローレンツ変換
されるが、Bnm も変換されるとしないと、うまく行かない。式 6.18 の左か
ら順変換係数を掛けると、左右はローレンツ変換される。
(
)
0
0
µ0 m
µ0 m n
µ0 m
F µ = ∂m
F = Q∂m
Bn v = Q∂m
Bn ∂νn0 ∂kν v k
( 0
)( 0 )
µ
= Q ∂m
Bnm ∂νn0 ∂kν v k
第 三 の 等 号 の 際 、Bnm と v n の 間 に
0
(
∂νn0 ∂kν
0
)
を入れたが、
0
(∂xn /∂xν )(∂xν /∂xk ) = δkn であり、さらに δkn v k = v n となることに
注意してほしい。これより、B に対する変換則が得られる。
0
0
µ
Bνµ0 = ∂m
Bnm ∂νn0
(6.24)
この変換則を利用すると、電磁場の各成分の変換則が次のように誘導で
きる。
Bx0 = Bx
Ex0 /c = Ex /c
By0 = γ(By + βEz /c)
Ey0 /c = γ(Ey /c − βBz )
Bz0
Ez0 /c
= γ(Bz − βEy /c)
(6.25)
= γ(Ez /c + βBy )
点電荷に働く力は、点電荷に運動量を与えるので、その分、電磁場の運動
量が減じたと理解しないと、運動量一定の原理が成立しなくなる。分布した
電荷や電流に働く力 f は、ローレンツ力を拡張した次式で与えられる。
f = ρE + J × B
(6.26)
90
第6章
一般相対性理論
これから、電磁場の運動量を求めることができる。同様に、ローレンツ力の
式と v の内積から、エネルギーの減少が計算できる。
f ·v =J ·E
(6.27)
電磁気学では、これらの式より電磁場の運動量とエネルギーを導出すること
ができる。
√
1 − (v/c)2 倍すると、四元ベクトルでまとめ
これら二つの式を γv = 1/
ることができる。
f n = Bkn J k
(6.28)
この右辺の J k を、式 6.22 を利用して場で置き換える。
fn = −
1 n
B ∂m B mk
µ0 k
(6.29)
すると、この式の右辺は次式のように変形できる。
mn
f n = −∂m Tem
(6.30)
mn
は次式で定義される。また、em は電磁場の意味である。
ただし、Tem
mn
Tem
=
1
µ0
(
)
1
B mk Bkn − g mn B kl Bkl
4
(6.31)
その証明は以下のようである。
mn
∂m (µ0 Tem
) =Bkn ∂m B mk + B mk ∂m Bkn
1
− g mn (B kl ∂m Bkl + Bkl ∂m B kl )
4
(6.32)
まず式 6.32 の第一項は −µ0 f n であり、第二項は次のように変形で
きる。
B mk ∂m Bkn = g nl B mk ∂m Blk =
1 nl mk
g B (∂m Blk + ∂m Blk )
2
1
= − g nl B mk (∂m Bkl + ∂k Blm )
2
6.3 エネルギー運動量テンソル
91
ここで、この式の三番目の等号であるが、第一項については Blk →
−Bkl と置き直している。また、第二項については m ↔ k と置き直
し、さらに B km → −B mk としている。また式 6.32 の第三項は、次
式のように変形できる。
1
1
− g mn (B kl ∂m Bkl + Bkl ∂m B kl ) = − g mn B kl ∂m Bkl
4
2
1
= − g nl B mk ∂l Bmk
2
ここで、まず最初の等号で、第二項の Bkl の昇階と B kl の降階を同
時に行うことで、計量テンソルが残らないようにし、二項を同じもの
にする。二番目の等号では、m ↔ l と置き換える。続いて m ↔ k と
置き換える。g ln → g nl とする。
したがって、式 6.32 は
1
mn
∂m Tem
= −f n − g nl B mk (∂m Bkl + ∂k Blm + ∂l Bmk ) = −f n
2
(6.33)
ここで、最後の括弧内は式 6.23 であることを利用して 0 にしている。
これで証明は終りである。
式 6.31 の Bkm を昇階すると、次式が得られる。
mn
Tem
1
=
µ0
(
)
1 mn kl
mk
ln
B gkl B − g B Blk
4
(6.34)
mn
Tem
は電磁場のエネルギー運動量テンソル (energy momentum ten-
sor) と呼ばれる。各成分は Bi と Ei の積和で与えられるが、それらは、マク
ij
スウェル応力テンソル (Maxwell stress tensor) Tem
の各成分、電磁場の
運動量 (momentum of electro-magnetic field) g i 、ポインティングベ
クトル (Poynting vector) の各成分 S i 、および電気エネルギー (electric
energy) ue と磁気エネルギー (magnetic energy) um の和と一致するこ
92
第6章
一般相対性理論
とが知られているため、これらを使って記載したものを示す。
xx
xy
Tem
Tem
yx
yy
Tem
Tem
mn
({Tem
}) =
zx
zy
Tem
Tem
x
−S /c −S y /c
xz
Tem
yz
Tem
zz
Tem
−S z /c
−cg x
−cg y
−cg z
−(ue + um )
(6.35)
これにより、電磁気的運動量と電磁気的エネルギーの両概念が統合されたこ
とが理解できよう。なお、式 6.28 と式 6.30 から、
mn
Bkn J k = −∂m Tem
(6.36)
が得られる。
続いて、電磁場から力を受ける荷電粒子系を考えよう。これに対し、次の
ようなテンソルを考える。テンソルの下サフィックス mat は物質系という
意味である。
mn
Tmat
=
N
∑
∫
dτi vim (τi )vin (τi )δ(x − xi (τi ))
mi c
(6.37)
i=1
mn
m = 4 としてみると、Tmat
が運動量密度やエネルギー密度になっているこ
とが理解できよう。n 6= 4、m 6= 4 の部分は、古典力学では扱われていない
が、恐らく物質系の応力になるのであろう。これは物質系のエネルギー運動
量テンソル (energy momentum tensor) と呼ばれる。
この両辺を xm で微分してみよう。
mn
∂m Tmat
=
N
∑
∫
mi c
dτi
i=1
=−
N
∑
∫
mi c
i=1
=
N
∑
i=1
n
dxm
i (τi ) dxi (τi )
∂m δ(x − xi (τi ))
dτi
dτi
mi c
dτi
∫
dτi
dxni (τi ) ∂
δ(x − xi (τi ))
dτi ∂τi
d2 xni (τi )
δ(x − xi (τi ))
dτi2
6.4 測地線と重力場中の質点の運動
=
N
∑
93
∫
dτi Bkn (xi (τi ))
Qi c
i=1
= Bkn (x)
N
∑
∫
Qi c
i=1
dτi
dxki (τi )
δ(x − xi (τi ))
dτi
dxki (τi )
δ(x − xi (τi ))
dτi
= Bkn J k
(6.38)
二行目の等号は ∂δ(x − y)/∂xn = −∂δ(x − y)/∂y n を利用している。三行
目の等号は部分積分を利用している。4 行目は荷電粒子の加速度をローレン
ツ力へ置き換えている。以下は容易に推定できると思う。
次式で、全エネルギー運動量テンソル (energy momentum tensor)
を定義する。
mn
mn
T mn = Tmat
+ Tem
(6.39)
式 6.36 と式 6.38 を連立すると、エネルギー運動量保存則 (energy mo-
mentum conservation law) と呼ばれる次の式が導かれる。
∂m T mn = 0
(6.40)
6.4 測地線と重力場中の質点の運動
等価原理から考えると、重力場の影響下における物体の運動は、慣性系
と異なる計量テンソルを持つ空間の測地線で表されそうである。測地線の
式 3.42 を再掲しておこう。
d2 xk
dxm dxn
+ Γkmn
=0
2
dτ
dτ dτ
(6.41)
物体の運動の軌道に沿っては、ds2 < 0 となるため、s の代わりに、dτ 2 =
−ds2 /c2 の関係にある τ を使っている。
測地線の方程式も、重力下におけるニュートンの方程式と同じく二階の微
分方程式であり、同じ数の自由度を持っている。問題を簡単にするために、
94
第6章
一般相対性理論
光速に比べ十分低速の粒子を対象にしよう。この仮定により dτ + dx4 /c と
できる。また、dx1 /dτ などは dx4 /dτ + c に比べ、圧倒的に小さいと言え
る。すると、上式 6.41 の Γkmn の効果は Γk44 のみしか効いてこないことがわ
かる。
4
4
d2 xk
k dx dx
=0
+
Γ
44
dτ 2
dτ dτ
(6.42)
さて、重力が x 方向にしかかからないとして、この式がニュートンの式と
近似的に一致するにはどうしたらよいだろうか。ニュートンの式は、重力
加速度を g とするとき、d2 x1 /dt2 = g である。幸いにして、低速におけ
る dx4 /dτ はほぼ c であるので Γk44 の項は k = 1 に対してだけ存在すれ
ばよい。さらに、Γ144 (dx4 /dτ )2 + c2 Γ144 で、これが −g であることより、
Γ144 = −g/c2 が得られる。*2 この他の空間座標方向には加速はないため、
k = 2, 3 に対して Γkmn = 0 となる。
次に計量テンソルを推定してみよう。gmn は慣性系の値とほとんど等し
く、僅かなずれしかないものとしよう。すると、計量テンソルから接続係数
を求める式 3.22 より、∂1 g44 、∂4 g14 、∂4 g41 、の三項しか値を持ちえない。
gmn は x 軸方向にしか変動していないだろうから、これから、g44 だけが存
在することになる。つまり、
1
g
Γ144 = − g 11 ∂1 g44 (= − 2 )
2
c
(6.43)
が得られる。g 11 がほぼ 1 であるので、g44 = 2g x/c2 + const が得られる。
より一般的には、φ(x) = const − gx を遠方に行くほど値が小さくなる x + 0
付近の重力ポテンシャル、かつ 1 に比べ十分小さい値を持つとして、
g44
*2
)
(
2
= − 1 + 2 φ(x)
c
(6.44)
m にも使われるが、これは δ m 、つまり空間の次
g の記号は、計量テンソルを縮約した gm
m
元数に等しく、余りに自明でかつ簡単に計算できるため、本書では現われないので、混
乱はないだろう。
6.4 測地線と重力場中の質点の運動
95
とすればよい。これ以外の gmn は δmn に等しいので、線素は次式のように
なる。
)
(
2
ds = −c dτ = dx + dy + dz − 1 + 2 φ(x) d(ct)2
c
2
2
2
2
2
2
= dx2 + dy 2 + dz 2 − (1 − 2gx/c2 )d(ct)2
(6.45)
改めて、これらの gmn からスタートして測地線の方程式を解いておく価値
があろう。Γkmn は Γ144 = −g/c2 、Γ414 = Γ441 = −g/[c2 (1 − 2gx/c2 )] を除い
てすべて 0 となる。そこで、k = 1, 4 に対する測地線方程式は、v k = dxk /dτ
として、次式のようになる。
g
dv 1
− 2 (v 4 )2 = 0
dτ
c
(6.46)
2g
1
dv 4
− 2
v1 v4 = 0
dτ
c 1 − 2gx/c2
(6.47)
式 6.47 の両辺を v 4 で割って、τ で積分すると、
d(log v 4 ) d log(1 − 2gx/c2 )
+
=0
dτ
dτ
v 4 (1 − 2gx/c2 ) = v04
(6.48)
積分定数 v04 は x = 0 における v 4 である。
これから得られた v 4 を式 6.46 へ代入すると、x1 (= x) だけの微分方程式
が得られるが、容易には解けない。そこで、今迄の例で度々行ったように、
線素の式を利用しよう。
−c2 = (v 1 )2 + (v 2 )2 + (v 3 )2 − (1 − 2gx/c2 )(v 4 )2
v 2 = v02 、v 3 = v03 なので、
√
v1 =
(v04 )2
− c2 − (v02 )2 − (v03 )2
1 − 2gx/c2
96
第6章
一般相対性理論
残念ながら、この微分方程式は解けない。2gx/c2 が 1 に比べ十分小さい場
合には 1/(1 − 2gx/c2 ) + 1 + 2gx/c2 とすることで、解くことが可能である。
√
τ − τ0 =
(v04 )2 (1 + 2gx/c2 ) − c2 − (v02 )2 − (v03 )2
(v04 )2 g/c2
これを x について解くと、
x = g(v04 /c)2 (τ − τ0 )2 /2 + c2 [c2 + (v02 )2 + (v03 )2 − (v04 )2 ]/2g(v04 )2
これより、質点の運動方程式が得られる。
g
x=
2
(
v04
c
)2
(τ − τ0 )2 + x0
(6.49)
v04 + c であるので、ほぼ、一定重力場の落下の式と一致する。
以上の議論から、質点の運動は重力場の影響を計量テンソルに反映させた
歪んだ空間の測地線で表されることがわかった。以後は、これをより一般化
することで、一般相対性理論に結び付けることになる。
6.5 アインシュタイン方程式
準備が整ったので、一般相対性理論 (general theory of relativity) を
紹介しよう。ニュートンの重力方程式をポアソン方程式で表すと、次式のよ
うになる。
2
▽ φ(x) = 4πGρ(x)
(6.50)
ところで、φ(x) は式 6.44 より、計量テンソルに対応することから、この式
の左辺は恐らく計量テンソルの二次微分になるであろう。また、右辺は質量
密度、つまりエネルギー運動量テンソルになることが予想できる。
第 6.3 節のエネルギー運動量テンソルは慣性系におけるものであるので、
一般相対論では若干の補正が必要である。 δ(x) 関数は体積全体で積分して
√
1 になる必要があるので、一般相対論の世界では δ(x)/ −|{gmn }| に変更
6.5 アインシュタイン方程式
97
mn
mn
する必要がある (式 2.24 参照)。そこで、Tmat
と Tem
は次式のようになる。
mn
Tmat
=√
N
∑
1
−|{gmn }|
mn
Tem
∫
mi c
i=1
1
=
m0
dτi
n
dxm
i (τi ) dxi (τi )
δ(x − xi (τi )) (6.51)
dτi
dτi
(
)
1 mn kl
mk
ln
B gkl B − g B Bkl
4
(6.52)
また、エネルギー運動量の保存則は、空間微分が共変微分に変って、
mn
mn
▽m T mn = ▽m (Tmat
+ Tem
)=0
(6.53)
ここまで準備ができたところで、右辺はエネルギー運動量テンソルとして
みよう。左辺の候補としては、今迄議論した各章から計量テンソルの二次微
分までを含むテンソルということになる。第 3 章の共変微分で現われた接
続係数はテンソルではない。第 4 章の曲率に示したいくつかの量には、計量
テンソルの二次微分が含まれている。曲率テンソルおよびそれを縮約した
リッチテンソルやスカラー曲率である。さらに、計量テンソル自身も 0 次微
分のテンソルである。右辺が 2 階のテンソルであるので、4 階の曲率テンソ
ルは候補とならない。リッチテンソル Rmn は有力な候補である。またスカ
ラー曲率に計量テンソルを掛けた g mn R も候補となる。さらに計量テンソ
ル g mn そのものも候補である。
このため、左辺をこれらの線形結合としてみよう。
c1 Rmn + c2 g mn R + c3 g mn = −c4 T mn
右辺の共変微分が 0 であることから左辺の共変微分も 0 のはずである。
c1 ▽m Rmn + c2 ▽m (g mn R) + c3 ▽m g mn = 0
まず、式 3.40 を縮約して ▽m g mn = 0 である。また、式 4.26 および式 4.27
より、▽m (g mn R) = 2 ▽m Rmn が成立するので、これらを上式に代入す
ると、
(c1 + 2c2 ) ▽m Rmn = 0
98
第6章
一般相対性理論
つまり、c2 = −c1 /2 が得られる。したがって、
1
Rmn − g mn R − Λg mn = −KT mn
2
(6.54)
が得られる。Λ = −c3 /c1 , K = c4 /c1 と置き換えている。Λg mn は宇宙項
(cosmological term) と呼ばれ、宇宙のサイズになると影響が現われてく
るが、アインシュタインも最後まで導入すべきかを迷った項である。またそ
の係数 Λ は、宇宙定数 (cosmological constant) と呼ばれるが、いまだ
に値が定まっていない定数である (もしかすると 0 かも知れない)。一方、K
はニュートンの重力場の方程式との対応から値を決めることができる。
式 4.26 に示したアインシュタインテンソル Gmn = Rmn − g mn R/2 を使
うと、もう少し式を簡単に表すことが可能であるが、だからといって計算が
簡単になるわけではないので、以後はこの形の式を利用する。
m
式 6.54 の両辺に gmn を掛けて縮約を行う。gmn g mn = δm
= 4 であるこ
とに着目すると、
R − 2R − 4Λ = −Kgmn T mn
これから得られた R を式 6.54 へ代入すると、
R
mn
(
)
1 mn
mn
kl
= −K T
− g gkl T
− Λg mn
2
(6.55)
この式は式 6.54 と等価であるため、この式を使って K を求めよう。
まず、重力場は十分小さいとすると、その計量テンソルへの影響も小さい
だろうから、g mn + η mn である。接続係数も次のように近似できるだろう。
Γnkm +
1 nl
η (∂k gml + ∂m gkl − ∂l gkm )
2
さらに、リッチテンソルも次のように近似できる。
n
Rmk = Rm,kn
= (∂k Γnnm + Γnkι Γιnm ) − (∂n Γnkm + Γnnι Γιkm )
+ ∂k Γnnm − ∂n Γnkm
6.5 アインシュタイン方程式
99
1 nl
η (∂k ∂n gml + ∂k ∂m gnl − ∂k ∂l gnm
2
−∂n ∂k gml − ∂n ∂m gkl + ∂n ∂l gkm )
1 nl
= η (∂k ∂m gnl − ∂k ∂l gnm − ∂n ∂m gkl + ∂n ∂l gkm )
2
=
ここで、接続係数は十分小さいということで、その二次の項は削除した。後
述との関係から R44 だけを計算しよう。また、定常状態を考え ∂4 = 0 とし
よう。
1 nl
1
η (∂4 ∂4 gnl − ∂4 ∂l gn4 − ∂n ∂4 g4l + ∂n ∂l g44 ) = η nl ∂n ∂l g44
2
2
(
)
1 2
1 2
2
1 2
= ▽ g44 = ▽ −1 − 2 φ(x) = − 2 ▽ φ(x)
2
2
c
c
R44 =
g44 と φ(x) の関係には式 6.44 を利用した。R44 も R44 = g 4m g 4n Rmn =
g 44 g 44 R44 + R44 なので、同じ式で与えられる。
mn
次に式 6.55 の右辺を考えよう。まず、T mn として Tmat
のみを考える。
粒子の速度が c に対し十分遅い場合、T mn は m = n = 4 を除いてほぼ 0 で
ある。また、T 44 + ρc2 であるので、上式の右辺は −Kρc2 /2 − Λ となる。
これらの結果、式 6.55 で m = n = 4 とした場合の式が得られる。
−
1 2
K
▽ φ(x) = − ρc2 − Λ
c2
2
式 6.50 と比較すると、Kc4 /2 = 4πG および Λ = 0 が得られる。これより
K = 8πG/c4 が得られる。なお、Λ = 0 としたが、重力場に対して無視でき
るぐらい小さな値を持つ可能性までは否定できない。その場合には Λ は残
しておく方がよいであろう。
最終的に得られた方程式はアインシュタイン方程式 (Einstein equa-
tion) と呼ばれ、次式で与えられる。
1
8πG
Rmn − g mn R − Λg mn = − 4 T mn
2
c
(6.56)
改めて、この式を見てみよう。右辺は分布質量を一般化したエネルギー運動
量テンソルである。これにより、空間の曲率に影響が出る。その影響は計量
100
第6章
一般相対性理論
テンソルの g 44 に重力ポテンシャルに対応した曲りを与える。その空間の測
地線で与えられる質点の運動は、重力中の運動と同じになるのである。
式 6.56 に g mn を掛けて縮約してみよう。
1
8πG
R − 4R − 4Λ = − 4 T
2
c
(6.57)
得られた R を式 6.56 へ代入すると、Rmn に対して解きやすい次式が得ら
れる。
Rmn = −
8πG mn 1 mn
(T
− g T ) − Λg mn
c4
2
(6.58)
6.6 シュバルツシルト解
アインシュタイン方程式は g mn に対し非線形であり、条件がよくないと、
簡単には解けない。しかし、中心に質量が固まっている場合、その周辺の領
域に対しては、シュバルツシルトが解を示した。周辺には質量がないため、
T mn = 0 が成立する。また、宇宙定数も 0 としよう。そこで解くべき方程
式は式 6.58 より、
Rmn = 0
となる。
球対称を仮定すると、線素は一般に次式で与えられる。
ds2 = e2g(r) dr2 + r2 dθ2 + r2 sin2 θ dφ2 − e2f (r) c2 dt2
デカルト空間の極座標の線素と比較すると、動径方向と時間方向の計量テン
ソルが異なっている。これらを指数関数にしたのは、単に数学的に扱いやす
くしただけで、物理的に深い意味はない。これから接続係数を計算すると、
6.6 シュバルツシルト解
101
0 でないものは以下のようになる。
Γrrr = g 0
Γrθθ = −re−2g
Γrφφ = −re−2g sin2 θ
Γrtt = e2(f −g) f 0
Γθrθ = Γθθr = Γφrφ = Γφφr =
1
r
Γθφφ = − sin θ cos θ
Γtrt = Γttr = f 0
Γφθφ = Γφφθ = cot θ
ここで、「0 」は r による微分である。さらに、リッチテンソルで 0 でないも
のを拾い出し、それらを 0 とすると次式が得られる。
2
Rrr = −(f 00 − f 0 g 0 + f 02 − g 0 ) = 0
r
Rθθ = 1 + e−2g (rg 0 − rf 0 − 1) = 0
Rφφ = Rθθ sin2 θ = 0
2
Rtt = e2(f −g) (f 00 − f 0 g 0 + f 02 + f 0 ) = 0
r
Rrr と Rtt の式より次式が得られる。
f 0 = −g 0
これを Rrr = 0 と Rθθ = 0 へ代入すると、次式が得られる。
2
g 00 − 2g 02 + g 0 = 0
r
1 + e−2g (2rg 0 − 1) = 0
後式は 1 − r(e−2g )0 − e−2g = 0 と書き換えられるので、簡単に解ける。
e−2g = 1 −
a
r
この式は Rθθ = 0 から得られた前式も充足する。また、f 0 = −g 0 より次式
も得られる。
(
a)
e2f = eb 1 −
r
102
第6章
一般相対性理論
実はここで増えた積分定数 b は dt2 の計量で吸収できるため、0 としても差
し支えない。得られた結果を線素の形に纏めると、次のようになる。
(
(
a )−1 2
a) 2 2
ds2 = 1 −
dr + r2 dθ2 + r2 sin2 θdφ2 − 1 −
c dt
r
r
(6.59)
これがシュバルツシルト解 (Schwarzschild solution) と呼ばれるもので
ある。
ここで重力場との関係から、a を定めることができる。式 6.44 と φ(r) =
−GM/r の関係から、g44 = −(1 − 2GM/c2 r) であるはずである。そこで
式 6.59 と比較して a が得られる。
a=2
GM
c2
(6.60)
a は長さの単位を持ち、シュバルツシルト半径 (Schwarzschild radius)、も
しくは重力半径 (gravitational radius) と呼ばれる。r = a では、g44 = 0
となり、時計が無限に遅れることになり、どんな物体も光ですらそこから外
へ脱出するこができなくなる。そこで、この半径以下のサイズを持つ星はブ
ラックホール (black hole) と呼ばれる。
シュバルツシルト半径の意味をより詳細に調べるために、この空間での測
地線を求めてみよう。まず、得られた gmn を利用して接続係数 Γkmn を求め
てみよう。
a (
a )−1
1−
2
2r(
r
a) 2
= −r 1 −
sin θ
r
1
= Γθθr =
r
1
φ
= Γφr =
r
a (
a )−1
t
= Γrt = 2 1 −
2r
r
Γrrr = −
Γrφφ
Γθrθ
Γφrφ
Γttr
(
a)
Γrθθ = −r 1 −
r )
a (
a
r
Γtt = 2 1 −
2r
r
Γθφφ = − sin θ cos θ
Γφθφ = Γφφθ = cot θ
6.6 シュバルツシルト解
103
これらを利用すると、以下の測地線の方程式が得られる。
( )2
( )2
(
a (
d2 r
a )−1 dr
a ) dθ
−
1
−
−
r
1
−
dτ 2
2r2
r
dτ
r
dτ
( )2
(
)2
(
)
(
)
a
dφ
a
d(ct)
a
2
−r 1−
sin θ
+ 2 1−
=0
r
dτ
2r
r
dτ
(
)
2
d2 θ
2 dr dθ
dφ
+
−
sin
θ
cos
θ
=0
dτ 2
r dτ dτ
dτ
d2 φ 2 dr dφ
dθ dφ
+
− 2 cot θ
=0
2
dτ
r dτ dτ
dτ dτ
d2 (ct)
a (
a )−1 dr d(ct)
=0
+ 2 1−
2
dτ
r
r
dτ dτ
(6.61)
(6.62)
(6.63)
(6.64)
式 6.62 から解こう。軸対称性から、一般性を損なうことなく、θ = π/2
と仮定してよさそうである。初期条件で θ = π/2 かつ dθ/dt = 0 とすると、
d2 θ/dτ 2 = 0 となり、以後 θ は一定のままとなることがわかる。
続いて式 6.63 は、第 3 項が消えるため簡単になり、
d
dτ
(
)
2 dφ
r
=0
dτ
となり、τ に関する面積速度一定の法則 (conservation of areas) (角運動
量保存則) が成立する。
r2
dφ
=h
dτ
(6.65)
続いて式 6.64 は次式の微分を実行し、両辺を (1 − a/r) で除した式になっ
ている。
d
dτ
[
]
d(ct) (
a)
1−
=0
dτ
r
つまり、ct の測地線は次式で与えられる。なお、積分定数は r → ∞ におけ
る γv として決定できる。
(
dt
a )−1
= γv (∞) 1 −
dτ
r
(6.66)
104
第6章
一般相対性理論
ここで、重力半径では dt → ∞ となることがわかる。したがって、どんな物
体も重力半径のところを越えられないことになる。
以上の条件を式 6.61 へ代入しよう。
( )2
d2 r
a (
a )−1 dr
h2 (
a)
−
1
−
− 3 1−
2
2
dτ
2r
r
dτ
r
r
2 (
aγv (∞)
a )−1
+
1−
=0
2
2r
r
これを直接解くことも可能であるが、式 6.59 の左辺を ds2 → −c2 dτ 2 とし、
さらに両辺を d(cτ )2 で除した次式からスタートする方が、積分を一回省略
できる。なお、今迄に得た諸条件を代入してある。
(
)2
(
(
a )−1
dr
h2
a )−1
2
−1 = 1 −
+
−
γ
(∞)
1
−
v
r
d(cτ )
(cr)2
r
(6.67)
これより直ちに次式が得られる。
√
(
)(
h2
dr
a)
2
= − γv (∞) − 1 +
1
−
d(cτ )
(cr)2
r
(6.68)
右辺を負としたのは、時間の経過とともに、r が減少するからである。当然、
質点を放り上げた場合には正となる。これは不定積分不能であるが、h = 0
かつ γv (∞) = 1、つまり、中心線上の運動で、かつ無限遠で質点が静止して
いる場合の運動を計算してみると、
√
dr
a
=−
d(cτ )
r
となり、次の結果が得られる。
)
2 (
cτ = √ r(τ = 0)3/2 − r3/2
3 a
(6.69)
τ = 0 における半径 r(τ = 0) から任意の半径に至る経過時間には、重力半
径における特異性は何も発見できない。γv (∞) > 1 の条件で、複雑な積分
6.7 ブラックホールはあるのか
105
を実行しても、特異性は発見できず、さらに、重力半径の内側からの運動に
も特異性は発見できない。
この結果を式 6.66 へ代入すると、t の τ に関する微分方程式が得られる。
この微分方程式は簡単に解け、
(
)2/3
√
3 a cτ
3/2
r(τ ) = r(τ = 0) −
2
として、
[
√
2
c(t − t0 ) = −aγv (∞) (r(τ )/a)3/2 + 2 r(τ )/a + log
3
(√
)]
r(τ )/a − 1
√
r(τ )/a + 1
(6.70)
となる。τ の増加とともに、r(τ ) は減少するので、右辺は増大することに注
意してほしい。言うまでもないが、r(τ ) = a となったとき、右辺の対数が
発散し、c(t − t0 ) は無限大になる。したがって、ブラックホールが生じるの
は、時間方向の特異性によることとなる。
6.7 ブラックホールはあるのか
ここまで述べたのが、従来のブラックホール説に関する説明であるが、私
自身はこのブラックホール説に、かなり問題を感じている。一つの理由は、
式 6.69 に示したように、固有時間 τ で入りこめる r には重力半径の特異性
が現われないことである。
もう一つは、重力半径で特異性を持つ r や t という座標は、質点の運動
が測地線になるように導入された座標であり、実際の寸法に裏打ちされた
座標ではないからである。実際の寸法を議論するにはスケール因子 (scale
factor) で補正された物差しを用いなければならない。例えば、二次元極
座標で、ある半径における円周を計算するには、dφ の積分では駄目で、ス
ケール因子を含んだ r dφ で計算しなければならない。同様に、シュバルツ
√
1 − a/r、ct 方向
シルト解で、実際の寸法を議論するには、r 方向には 1/
106
第6章
図 6.1
には
一般相対性理論
R(縦軸) と r(a = 1 としている) の関係 (R0 = 0 としている)
√
1 − a/r というスケール因子を考慮しなければならない。その結果、
r = a がどの位置にくるかを知ることによって、初めて、ブラックホールの
ような現象が起るのかを議論しなければならないのである。
実際の半径 R と r の関係は、スケール因子を利用して次式のようになる。
∫
R=
√
√
1 + 1 − a/r
a
dr
√
√
= r 1 − a/r + log
+ R0
2
1 − a/r
1 − 1 − a/r
ここで、積分定数 R0 は r = a における R の値である。試しに R0 = 0 と
してみると、図 6.1 に示すように、r = a は R = 0 に対応する。だとする
と、重力半径は、実空間では観測できないこととなる。この図の十分遠方で、
r → R となっていると大変都合がよいのであるが、右の方を見ると、R − r
は 0.6 ぐらいと、すでに R の方が r を上回って、ほぼ直線的な関係がある
ように見受けられる。それならば、R0 = −0.6 とすればよさそうであるが、
実は差は徐々に開いていくのである。これは、上記変換式に対数が入ってい
るためである。いずれにせよ、重力半径が実世界でどの位置にくるのかを決
定するには、R0 次第なのである。残念ながら、現在の私の能力ではこれ以
上の議論はできないが、いずれにせよ r = a が R = a でないことだけは確
かそうである。こうした結果から、私個人はブラックホール説に十分納得し
6.8 その他の相対論の効果
107
ていないのである。
続いて光の測地線を求めてみよう。光線については、式 6.59 で ds2 = 0
とすればよいので、中心を通る光線については、次式が成立する。
(
dr
a)
= ±c2 1 −
dt
r
またもや、r = a で光速は 0 となるかに見え、多くの書でも、この式により、
光すら重力半径を抜けることができないと記載されている。となるが、ス
ケール因子を考慮すると、次式のように光の速度は c であることがわかる。
√
(1 − a/r)−1 dr
√
= ±c2
1 − a/rdt
つまり、光の速度は断固 c であり、重力半径における特異性はすっかり消え
てしまうのである。この結果からも、実空間の重力半径は特異点でも何でも
ない可能性は十分高いと言えよう。
6.8 その他の相対論の効果
その他の相対論的効果が予測され、観測によりほぼ確認されている。その
概要を述べる。
式 6.67 を変形すると、T + V = E の形に変形することができる。この
際、V に r −3 の項が入ってくる。こうした項はケプラーの惑星の運動方程
式に対する摂動項として働くため、惑星の運動を乱す。その結果、重力ポ
テンシャルの大きなところを動く水星の近日点移動 (perihelion shift) と
なって観測することが可能となる。
光線の式を解く際、ds = 0 とするが、そうなると複数の変数に対しては対
応できなくなる。そこで、媒介変数を入れると作業が続行できる。
(
a )−1
0= 1−
r
(
dr
dσ
)2
(
+r
2
dφ
dσ
)2
(
a) 2
− 1−
c
r
(
dt
dσ
)2
108
第6章
一般相対性理論
光線も測地線方程式を満すので、作業はほとんど同じであるので、σ を τ
のように扱うだけとなる。この計算の結果、重力場による光の湾曲 (light
bending) を導くことができる。
空間に固定された二点間の間の時間間隔は、
−c2 dτ 2 = g44 c2 dt2
√
−g44 の影響を受ける。このため、大きな重力ポテンシャ
√
ルで発射されたパルス間隔 dt に対する dτ は −g44 が小さい分、短くな
が成立するため
る。詳細は省くが、この dτ の差が周波数の差を与える。つまり、重力ポテ
ンシャルの小さいところでは周波数が低く見えることになる。つまり、重力
赤方偏移 (gravitational redshift) を起こす。
この他にもいくつかの効果があるが、詳細は天文学などの書を参照してほ
しい。
109
索引
■ A
affine connection coefficient(アフィン接
続係数) . . . . . . . . . . . . . . . . . . . . . 34
affine transform(アフィン変換) . . . 8, 34
anti-symmetricity(反対称性) . . . . . . . . 60
curvilinear coordinate system(曲線座標
系) . . . . . . . . . . . . . . . . . . . . . . . . . . 1
■ D
dual basis(双対基底) . . . . . . . . . . . . . . . . 20
■ B
■ E
basis(基底) . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Biannki equation(ビアンキ恒等式) . . 61,
63
black hole(ブラックホール) . . . . . . . . . 102
Einstein convention(アインシュタイン規
約) . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Einstein equation(アインシュタイン方程
式) . . . . . . . . . . . . . . . . . . . . . . . . 99
Einstein tensor(アインシュタインテンソ
ル) . . . . . . . . . . . . . . . . . . . . . . . . 62
electric energy(電気エネルギー) . . . . . 91
electromagnetic tensor(電磁テンソル) 87
energy momentum conservation law(エ
ネルギー運動量保存則) . . . . . . . 93
energy momentum tensor(エネルギー運
動量テンソル) . . . . . . . . 87, 91–93
equivalence principle(等価原理) . . . . . 82
Euler equation(オイラー方程式) . . . . . 48
exact derivative(完全微分) . . . . . . 34, 42
■ C
Cartesian coordinate system(デカルト座
標系) . . . . . . . . . . . . . . . . . . . . . . . . 1
Christffel symbol(クリストッフェル記号)
38
commutation(交換対称性) . . . . . . . . . . . 60
connection coefficient(接続係数) . . . . 34
conservation of areas(面積速度一定の法
則) . . . . . . . . . . . . . . . . . . . . . . . 103
contravariant(反変) . . . . . . . . . . . . . 10, 15
contravariant component(反変成分) . 15
contravariant transform coefficient(反変
変換係数) . . . . . . . . . . . . . . . . . . . . 8
contravariant vector(反変ベクトル) . . 15
cosmological constant(宇宙定数) . . . . 98
cosmological term(宇宙項) . . . . . . . . . . 98
covariant(共変) . . . . . . . . . . . . . . . . . 10, 15
covariant component(共変成分) . . . . . 22
covariant derivative(共変微分) . . . . . . 43
covariant differential(共変微分商) . . . 42
covariant transform coefficient(共変変換
係数) . . . . . . . . . . . . . . . . . . . . . . . . 9
covariant vector(共変ベクトル) . . . . . . 22
curvature tensor(曲率テンソル) . . . . . 54
■ F
forward transform(順変換) . . . . . . . . . . . 8
four force(四元力) . . . . . . . . . . . . . . . . . . 86
four momentum(四元運動量) . . . . . . . . 85
four velocity(四元速度) . . . . . . . . . . . . . 84
■ G
general theory of relativity(一般相対性理
論) . . . . . . . . . . . . . . . . . . . . . . . . 96
geodesic coordinate system(測地座標系)
37
geodesic line(測地線) . . . . . . . . . . . 47, 48
gravitational radius(重力半径) . . . . . 102
gravitational redshift(重力赤方偏移) 108
110
■ I
索引
■ J
Ricci tensor(リッチテンソル) . . . . . . . . 62
Riemanian geometry(リーマン幾何学) 1
Riemann Christoffel curvature
tensor(リーマン・クリストッフェ
ル曲率テンソル) . . . . . . . . . . . . . 54
Jacobian(ヤコビアン) . . . . . . . . . . . . . . . 26
Jacobian matrix(ヤコビ行列) . . . . . . . . . 9
■ S
inertial system(慣性系) . . . . . . . . . 82, 83
inner product(内積) . . . . . . . . . . . . . . . . . 4
■ K
Kronecker delta(クロネッカーのデルタ) .
5
■ L
light bending(光の湾曲) . . . . . . . . . . . 108
line element(線素) . . . . . . . . . . . . . . . . . . . 3
line element vector(線素ベクトル) . . . . 3
linear coordinate system(直線座標系) 1
lowering(降階) . . . . . . . . . . . . . . . . . . . . . 24
scalar(スカラー) . . . . . . . . . . . . . . . . . . . . 16
scalar curvature(スカラー曲率) . . . . . . 62
scale factor(スケール因子) . . . 7, 72, 105
Schwarzschild radius(シュバルツシルト半
径) . . . . . . . . . . . . . . . . . . . . . . . 102
Schwarzschild solution(シュバルツシルト
解) . . . . . . . . . . . . . . . . . . . . . . . 102
special theory of relativity(特殊相対性理
論) . . . . . . . . . . . . . . . . . . . . . . . . 83
spherical coordinate system(球面座標系)
13
static mass(静止質量) . . . . . . . . . . . . . . . 86
■ M
magnetic energy(磁気エネルギー) . . . 91
Maxwell stress tensor(マクスウェル応力
テンソル) . . . . . . . . . . . . . . . . . . . 91
metric tensor(計量テンソル) . . . . . . . . . . 3
Minkowski space(ミンコウスキー空間) 6
momentum of electro-magnetic field(電
磁場の運動量) . . . . . . . . . . . . . . . 91
■ T
tensor(テンソル) . . . . . . . . . . . . . . . . . . . . 16
total derivative(全微分) . . . . . . . . . . . . 34
transform(変換) . . . . . . . . . . . . . . . . . . . . . 8
transform coefficient(変換係数) . . . . . . 8
translation(平行移動) . . . . . . . . . . . . . . . 32
■ U
■ N
unit vector(単位ベクトル) . . . . . . . . 2, 71
natural basis(自然基底) . . . . . . . . . . . . . . 2
■ V
■ O
vector(ベクトル) . . . . . . . . . . . . . . . . . . . . . 2
orthogonal coordinate system(直交座標
系) . . . . . . . . . . . . . . . . . . . . . . . . . . 1
orthogonal curvilinear coordinate
system(直交曲線座標系) . . 1, 72
■ あ
アインシュタイン規約 (Einstein
convention) . . . . . . . . . . . . . . . . . 3
アインシュタインテンソル (Einstein
■ P
perihelion shift(近日点移動) . . . . . . . . 107
physical component(物理成分) . . . . . . 73
Poynting vector(ポインティングベクトル)
91
■ R
raising(昇階) . . . . . . . . . . . . . . . . . . . . . . . 24
relativistic mass(相対論的質量) . . . . . . 86
reverse transform(逆変換) . . . . . . . . . . . 9
Ricci formula(リッチの公式) . . . . . . . . 60
tensor) . . . . . . . . . . . . . . . . . . . . 62
アインシュタイン方程式 (Einstein
equation) . . . . . . . . . . . . . . . . . . 99
アフィン接続係数 (affine connection
coefficient) . . . . . . . . . . . . . . . . . 34
アフィン変換 (affine transform) . . . 8, 34
一般相対性理論 (general theory of
relativity) . . . . . . . . . . . . . . . . . 96
宇宙項 (cosmological term) . . . . . . . . . 98
宇宙定数 (cosmological constant) . . . 98
111
エネルギー運動量テンソル (energy
momentum tensor) . 87, 91–93
エネルギー運動量保存則 (energy
momentum conservation law) .
93
オイラー方程式 (Euler equation) . . . . 48
■ か
慣性系 (inertial system) . . . . . . . . . 82, 83
完全微分 (exact derivative) . . . . . . 34, 42
基底 (basis) . . . . . . . . . . . . . . . . . . . . . . . . . 2
逆変換 (reverse transform) . . . . . . . . . . . 9
球面座標系 (spherical coordinate system)
13
共変 (covariant) . . . . . . . . . . . . . . . . 10, 15
共変成分 (covariant component) . . . . 22
共変微分 (covariant derivative) . . . . . . 43
共変微分商 (covariant differential) . . . 42
共変ベクトル (covariant vector) . . . . . 22
共変変換係数 (covariant transform
coefficient) . . . . . . . . . . . . . . . . . . 9
曲線座標系 (curvilinear coordinate
system) . . . . . . . . . . . . . . . . . . . . . 1
曲率テンソル (curvature tensor) . . . . . 54
近日点移動 (perihelion shift) . . . . . . . 107
クリストッフェル記号 (Christffel symbol)
38
クロネッカーのデルタ (Kronecker delta)
5
計量テンソル (metric tensor) . . . . . . . . . 3
降階 (lowering) . . . . . . . . . . . . . . . . . . . . . 24
交換対称性 (commutation) . . . . . . . . . . 60
光の湾曲 (light bending) . . . . . . . . . . . 108
■ さ
磁気エネルギー (magnetic energy) . . . 91
自然基底 (natural basis) . . . . . . . . . . . . . 2
重力赤方偏移 (gravitational redshift) . . .
108
重力半径 (gravitational radius) . . . . 102
シュバルツシルト解 (Schwarzschild
solution) . . . . . . . . . . . . . . . . . 102
シュバルツシルト半径 (Schwarzschild
radius) . . . . . . . . . . . . . . . . . . . 102
順変換 (forward transform) . . . . . . . . . . 8
昇階 (raising) . . . . . . . . . . . . . . . . . . . . . . 24
スカラー (scalar) . . . . . . . . . . . . . . . . . . . 16
スカラー曲率 (scalar curvature) . . . . . 62
スケール因子 (scale factor) . . . 7, 72, 105
静止質量 (static mass) . . . . . . . . . . . . . . 86
接続係数 (connection coefficient) . . . . 34
線素 (line element) . . . . . . . . . . . . . . . . . . 3
線素ベクトル (line element vector) . . . 3
全微分 (total derivative) . . . . . . . . . . . . 34
相対論的質量 (relativistic mass) . . . . . 86
双対基底 (dual basis) . . . . . . . . . . . . . . . 20
測地座標系 (geodesic coordinate system)
37
測地線 (geodesic line) . . . . . . . . . . . 47, 48
■ た
単位ベクトル (unit vector) . . . . . . . . 2, 71
直線座標系 (linear coordinate system) 1
直交曲線座標系 (orthogonal curvilinear
coordinate system) . . . . . . 1, 72
直交座標系 (orthogonal coordinate
system) . . . . . . . . . . . . . . . . . . . . . 1
デカルト座標系 (Cartesian coordinate
system) . . . . . . . . . . . . . . . . . . . . . 1
電気エネルギー (electric energy) . . . . . 91
電磁テンソル (electromagnetic tensor) . .
87
電磁場の運動量 (momentum of
electro-magnetic field) . . . . . 91
テンソル (tensor) . . . . . . . . . . . . . . . . . . . 16
等価原理 (equivalence principle) . . . . 82
特殊相対性理論 (special theory of
relativity) . . . . . . . . . . . . . . . . . 83
■ な
内積 (inner product) . . . . . . . . . . . . . . . . . 4
■ は
反対称性 (anti-symmetricity) . . . . . . . 60
反変 (contravariant) . . . . . . . . . . . . 10, 15
反変成分 (contravariant component) 15
反変ベクトル (contravariant vector) . 15
反変変換係数 (contravariant transform
coefficient) . . . . . . . . . . . . . . . . . . 8
ビアンキ恒等式 (Biannki equation) . 61,
63
物理成分 (physical component) . . . . . 73
ブラックホール (black hole) . . . . . . . . 102
平行移動 (translation) . . . . . . . . . . . . . . 32
ベクトル (vector) . . . . . . . . . . . . . . . . . . . . 2
変換 (transform) . . . . . . . . . . . . . . . . . . . . 8
112
索引
変換係数 (transform coefficient) . . . . . . 8
ポインティングベクトル (Poynting
vector) . . . . . . . . . . . . . . . . . . . . 91
■ ま
マクスウェル応力テンソル (Maxwell
stress tensor) . . . . . . . . . . . . . . 91
ミンコウスキー空間 (Minkowski space) 6
面積速度一定の法則 (conservation of
areas) . . . . . . . . . . . . . . . . . . . . 103
■ や
ヤコビアン (Jacobian) . . . . . . . . . . . . . . 26
ヤコビ行列 (Jacobian matrix) . . . . . . . . 9
四元運動量 (four momentum) . . . . . . . 85
四元速度 (four velocity) . . . . . . . . . . . . . 84
四元力 (four force) . . . . . . . . . . . . . . . . . . 86
■ ら
リーマン幾何学 (Riemanian geometry) 1
リーマン・クリストッフェル曲率テンソル
(Riemann Christoffel curvature
tensor) . . . . . . . . . . . . . . . . . . . . 54
リッチテンソル (Ricci tensor) . . . . . . . 62
リッチの公式 (Ricci formula) . . . . . . . . 60
© Copyright 2026 Paperzz