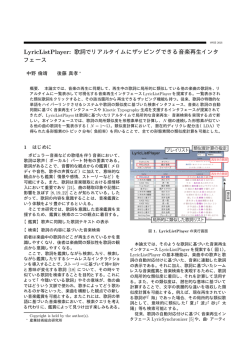
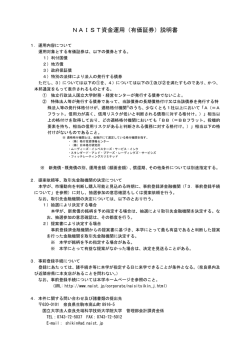
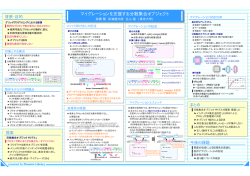
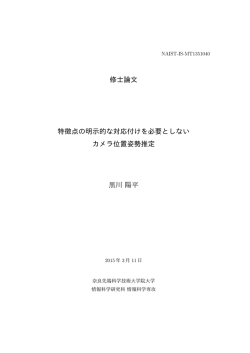
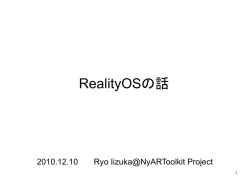
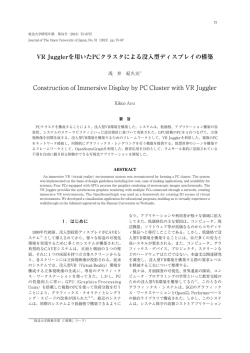
MIRU2014 Extended Abstract 第 17 回画像の認識・理解シンポジウム 画像修復を用いた隠消現実感 河合 紀彦1,a) 佐藤 智和1,b) 横矢 直和1,c) 1. はじめに 隠消現実感 (Diminished Reality) とは,映像中の不要な 物体をリアルタイムで視覚的に取り除く技術であり,映 像中に仮想的な物体を重畳する拡張現実感 (Augmented Reality) の反対に位置付けられ,複合現実感分野において 近年研究が盛んになりつつある.隠消現実感は,例えば図 1 に示すような,現実環境中の家具や看板の除去による屋 内外環境の景観シミュレーションや,マーカを用いた拡張 現実感において現実環境と仮想物体の真の融合を実現する ためのマーカの隠蔽のような目的に応用できる. 隠消現実感は背景画像を除去対象物体の上に重畳するこ とで実現されるが,これまでの研究では背景画像を生成す るために,実際の背景を事前にまたは複数のカメラを用い て取得する手法 [1], [2] と画像修復を用いる手法 [3], [4] が 提案されている.真の背景が必要であるアプリケーション では前者の手法を用いることが必然である.しかし,必ず 図 1 隠消現実感のアプリケーション例 (左列:入力画像,右列:本 しも真の背景が必要でないアプリケーションにおいて,対 手法による結果,上段:家具の除去,中段:看板の除去,下段: 象物体が固定されている,または移動させることが困難な 拡張現実感マーカの隠蔽) ため,その背景を取得することが出来ない場合や,背景の 事前取得等のユーザの負荷を減らしたい場合には,後者の 2.1 対象シーンの解析 手法の方が有効である.本研究では,後者の画像修復を用 処理 (A) では,まず PTAM[6] により初期のカメラ位置 いる手法に着目し,対象シーンを解析することで,三次元 姿勢と特徴点の三次元位置を推定し (a-1),図 3(a) に示す 的なシーンに対応した隠消現実感を実現する [4].ただし, ようにユーザが対象物体を画面上で囲み指定する (a-2).対 本研究では,除去対象物体は静止しており,背景形状は複 象物体を囲み終えた時のフレームを,キーフレームとして 数の局所的な平面で近似できると仮定する. 画像修復処理 (B) で用いる.次に,対象物体周辺の特徴点 2. 画像修復を用いた隠消現実感手法の概要 をドロネー分割により連結することで特徴点の法線ベクト ルを算出し (a-3),得られた法線ベクトルを特徴量とした 図 2 に提案手法の処理の流れを示す.本手法は,まず三 mean-shift クラスタリングにより,各特徴点を任意の数の 次元的なシーンに対応するための対象シーンの幾何学的な グループに分類する (図 3(b)).次に,各グループの特徴点 解析を行い (A),次に,解析結果を利用し,キーフレームに に対し,LMeds により平面を当てはめる (a-4).ここで平 対する画像修復処理 (B) および,フレーム毎の修復画像の 面の数は,基本的にはグループの数とするが,あるグルー 重畳処理 (C) を並列に行う.以下,各処理について述べる. プ内における特徴点の数が他のグループよりも極端に少な い場合は,そのグループは取り除く.次に,当てはめた全 ての平面を画像平面に投影し,カメラと最も近い平面を各 1 a) b) c) 奈良先端科学技術大学院大学情報科学研究科 〒 630–0192 奈良 県生駒市高山町 8916–5 [email protected] [email protected] [email protected] 画素に割り当てる.この割り当てに基づき,図 3(c) に示す ように除去対象領域を含む画像全体を分割する (a-5).次 に,処理 (B) および処理 (C) において,入力画像を各平面 に対して真正面から見たような画像に変換する画像の正対 1 This abstract is opened for only participants of MIRU2014 MIRU2014 Extended Abstract 第 17 回画像の認識・理解シンポジウム (A) 対象シーンの解析 (a-1) 初期カメラ位置・姿勢および特徴点三次元位置の推定 (a-2) ユーザによる除去対象の選択 (a-3) 各特徴点の法線ベクトルを算出 (a) 領域指定 (a-4) 背景に任意の数の平面を検出 (b) グループ化 図 3 (a-5) 画像の領域分割 (c) 画像分割 対象シーン解析 (a-6) 画像正対化のためのパラメータの保存 (a-7) 除去対象の三次元領域の設定 正対化 物体除去の開始 (B) 画像修復 (C)修復画像の重畳 (キーフレーム) (毎フレーム) (b-2) 探索領域の限定 (c-2) カメラ位置姿勢の推定 (b-3) 欠損領域に 初期値の付与 (b-4) 類似テクスチャ パターンの探索 (b-5) 画素値の更新 エネルギーの収束まで反復 図 2 (c-3) 画像の正対化 (c-4) マスク領域の設定 探索領域の限定 次のフレーム (c-1) 画像を取得 (暫定的な)修復画像 (b-1) 画像の正対化 画像修復 (c-5) 修復画像の色調補正 (c-6) 各正対画像の マスク領域に背景重畳 (c-7) 正対画像の結合 提案手法の処理の流れ 図 4 画像修復の流れ ピーしただけでは違和感が生じる場合がある.このため, キーフレームと現フレームの正対画像を比較することで, 化に利用するための,各平面上の 4 点の三次元位置を保存 色調の変化率を算出し,キーフレームの修復画像の色調を する (a-6).最後に,処理 (C) において,修復画像を重畳 調整を行った後,マスク領域に重畳する (c-5),(c-6).最後 するためのマスク領域を設定するための,対象物体を含む に,各正対画像上での重畳結果をもとの入力画像の見え方 三次元領域を設定し保存する (a-7).なお,本処理は,ユー に変換し結合することで,対象物体が除去された画像を出 ザによる対象領域の指定後,数十ミリ秒程度で完了する. 力する (c-7).処理 (C) の処理速度は,検出される平面数 等にも依存するが,おおよそ 20 から 30fps である. 2.2 画像修復 謝辞 本研究の一部は,日本学術振興会科学研究費補助金, 処理 (B) では,高品質な修復結果を得るために,図 4 に 示すように,画像の正対化および,画像の領域分割結果に基 基盤研究 (A),No. 23240024,若手研究 (B),No. 24700118 による. づく探索領域の限定を行う.その後,各画像に対して画像 修復 [5](欠損領域に初期値を付与した後,類似テクスチャ パターンの探索と画素値の更新の反復処理) を行うことで 参考文献 [1] 修復画像を得る.画像修復が完了するまでには数秒程度か かるため,最初の数秒程度は途中結果を用いて処理 (C) に て重畳処理を行うことになるが,数秒後には完全に修復さ [2] れた高品質な修復画像を用いて物体の除去を行うことがで きる. [3] 2.3 修復画像の重畳 処理 (C) では,まず PTAM[6] によりカメラ位置姿勢を [4] 推定し,それを利用し (a-6) で保存した 4 点を画像上に投 影し,ホモグラフィを求めることで画像の正対化を行う (c-3).次に,(a-7) で得られた三次元領域を各平面に投影 することでマスク領域を得る (c-4).次に,修復画像を現フ レームのマスク領域に重畳するが,環境の照明変化やカメ [5] [6] Cosco, F. I., Garre, C., Bruno, F., Muzzupappa, M. and Otaduy, M. A.: Augmented Touch Without Visual Obtrusion, Proc. ISMAR, pp. 99–102 (2009). Enomoto, A. and Saito, H.: Diminished Reality using Multiple Handheld Cameras, Proc. ACCV’07 Workshop on Multi-dimensional and Multi-view Image Processing, pp. 130–135 (2007). Herling, J. and Broll, W.: PixMix: A Real-Time Approach to High-Quality Diminished Reality, Proc. ISMAR, pp. 141–150 (2012). Kawai, N., Sato, T. and Yokoya, N.: Diminished Reality Considering Background Structures, Proc. ISMAR, pp. 259–260 (2013). Kawai, N. and Yokoya, N.: Image Inpainting Considering Symmetric Patterns, Proc. ICPR, pp. 2744–2747 (2012). Klein, G. and Murray, D.: Parallel Tracking and Mapping for Small AR Workspaces, Proc. ISMAR, pp. 225– 234 (2007). ラの光学パラメータの変化により,修復画像をそのままコ 2 This abstract is opened for only participants of MIRU2014
© Copyright 2026 Paperzz