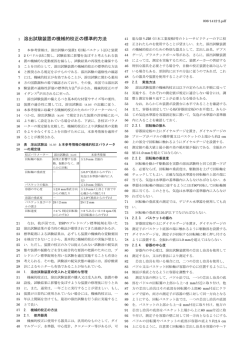
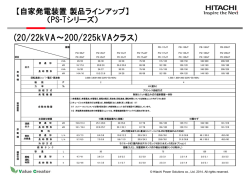
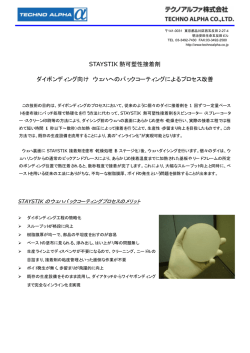
系統連系実験装置の製作 E99071 近田明利 1. はじめに 特定電気事業等新しい形態での電力供給が次々に実現 指導教員 藤田吾郎 ③ 起電力の周波数が等しいこと ④ 起電力の波形が等しいこと ⋅ しつつある。それらの電源には高い総合効率,短い工期, ⋅ ⋅ I = I1+ I2 俊敏な起動特性・負荷追従性,クリーンな排気等の厳し ⋅ Ic ⋅ I1 I2 ⋅ 装置としてガスタービンが広く使用されている。 負荷 い条件が求められるが,そのような条件を満たした発電 ⋅ E1 E2 ⋅ しかしながら,高速(数千∼数万回転min-1)で回転す ⋅ Zs Zs る軸によりエネルギーを伝達するため,慣性モーメント が大きく,発電機の回転子と外部駆動機関の特性は異な るため両者の回転速度に差が生じ軸ねじれ現象が発生す 図1 同期発電機の並行運転 る。また瞬時停電や瞬時電圧降下等の系統外乱(シェア ピンなどの遮断器による開閉のタイミングなど)により 3.同期検定 発生する電気トルクが軸に機械的ストレスを与えてしま 両発電機の位相差を確かめる装置を同期検定装置とい うことがある。このストレスが蓄積すると軸を保護する い,同期検定灯と指針形の同期検定器がある。ここでは, ために設備されているシェアピンによりトルク伝達が遮 同期検定灯を用いる。 断され運転の継続が不可能となることがあるので,この 過渡的な軸ねじれトルクの解明が必要であった。 同期検定灯は図2のように白熱電球3個を接続したも のである。周波数,位相に差異があると左回りまたは右 本研究では実際の系統連系に近づけるために,発電機 回りに電灯が明滅する。その差異が少なくなると,その 並行運転装置の製作とそのときの状態について研究を行 回転速度は遅くなる。周波数と位相が一致したとき,L1 った。 が消え,L2,L3が同じ明るさになる。 2.系統連系 2.1 導入 U2 U1 V1 V2 W1 W2 最近ではますますエネルギー増加が要求され,CGS L1 (コージェネレーションシステム)のような発電システム L2 は産業,ビル,病院のような公共施設に広く広がってい L3 る。そして高速情報社会の発展のため,CGSも電力の 供給源として信頼性の要求が必要である。 一般に,CGSは商業システムに相互連系をして使用 図2 同期検定灯の接続 する。したがって,商業システムで事故が発生する場合, 瞬時電源電圧降下(瞬時電圧降下と呼んでいる)が起こ 4.系統連系モデル り,事故電流は遮断器によって遮断される。そして要求 同期検定灯を用いた実際の系統連系の回路図を図3に される分散型発電システムの相互連系にダメージを与え 示す。この研究は昨年のモデルを利用し,実際の電力系 る。一方,電源系統の信頼性向上のため,商用電源系統 統に少しでも近づけた状態での軸ねじれ現象を見ようと, の事故時に,重要負荷を発電機が背負って解列し,重要 原動機−同期発電機部分を増やし,同期検定を含むスイ 負荷に無停電を継続するシステムの要求のニーズが増え てきている。 2.2 同期発電機の並行運転条件[1] 同期発電機の並行運転は実際の電力系統において実施 さえている。図1のように2台以上の発電機を並行運転さ せるには以下の項目を満足しなければならない。 ① 起電力の大きさが等しいこと ② 起電力が同位相であること ッチ(来年に向けて電力計を接続する部分を含む)を製 作し並行運転を試みた。また誘導電動機の電源にはイン バータを用いて三相誘導電動機として使用している。 5.検討結果とまとめ 実験装置を最悪のタイミングで同期投入したときの軸 への影響と状態の把握について実験を行った。既存の同 期発電機で並行運転の投入タイミングによる軸への影響 は確認できたが、同期投入後の実際の軸への影響とそれ 参考文献 に伴う負荷変動による軸の変化とそれを制御するまでに [1] 図4から図7は,同期検定灯を基準に同期していない時 [2] (L3・L2 が消灯)と,同期している時(L 1が消灯)と,同期運 転から単独運転になった時の軸の状態をグラフで示した。 軸の状態は発電機側と電動機側の速度差で示してある。 [3] [4] 本研究から同期投入の重要性と軸ねじれ解析として発 展の見込みのある装置ができたと思う。今後は同期投入 後の負荷変動による二つの同期発電機への影響とそのと [5] きの軸ねじれ制御回路の製作などがあげられる。 海老原大樹 , 『電気機器』 , 共立出版株式会社 (1998) 井上宇市・水野宏道・高田秋一,『ガスコージェネレ ーション∼計画から運転保守まで』,社団法人日本ガ ス協会(2000) 武田幸男・根岸道明, 『自動電圧調整』,オーム社 坂本光男・壱岐浩幸・横田淳一・村山 寛, 「系統 側の電気的外乱によるガスタービン発電機のシェア ピン保護」,電気学会電力・エネルギー部門大会, No.357(1993) H. Iki and M. Isozaki, “The Investigation of a ShaftTorsional Phenomenon Objecting CGS”, IPST`99 3 3 34 34 2 系統2 系統1 1.5 30 28 回転速度 電圧[V] 32 2.5 回転速度[rps] 1 26 0.5 24 0.5 0 22 0 5000 10000 15000 20000 25000 系統2 系統1 回転速度 1.5 1 0 32 2 24 22 5000 10000 図6 L3 が消灯した時 20000 25000 30000 L1 が消灯した時 3 3 34 34 2 系統2 系統1 回転速度 1.5 30 28 1 26 0.5 24 0 2.5 電圧[V] 32 回転速度[rps] 2.5 電圧[V] 15000 時間[μs] 時間[μs] 図4 28 26 0 30000 30 5000 10000 15000 20000 25000 系統2 系統1 回転速度 1.5 26 24 22 5000 10000 15000 20000 25000 30000 時間[μs] 時間[μs] 図5 28 0.5 0 30000 30 1 0 2 0 32 2 図7 L2 が消灯した時 図3 回路図 on(同期投入)からoff(単独運転)になった時 回転速度[rps] 電圧[V] 2.5 回転速度[rps] いたっていない。
© Copyright 2026 Paperzz