群ロボットにおける
フェロモン・コミュニケーション
藤澤 隆介
電気通信大学大学院電気通信学研究科
博士(工学)の学位申請論文
年 月
群ロボットにおける
フェロモン・コミュニケーション
博士論文審査委員会
主査 松野 文俊
委員 田中 一男
委員 中野 和司
委員
明 愛国
委員 高玉 圭樹
委員 長谷川 晶一
教授
教授
教授
准教授
准教授
准教授
著作権所有者
藤澤 隆介
! "# $ % &' ( $ &'
) * $ + , -. 群ロボットにおける
フェロモン・コミュニケーション
藤澤 隆介
概 要
群ロボット・システムにおけるフェロモン・コミュニケーションに着目して研究を進める.フェ
ロモン・コミュニケーションとは,社会性昆虫であるアリやシロアリで盛んに行われているコミュ
ニケーション方法である.アリやシロアリはカーストなどの社会構造を有し相互にコミュニケー
ションを行うことが求められる.一般的に知られている例として,採餌時のフェロモンを用いた
誘引行動が知られている.餌を発見した個体は,帰巣するときに餌と巣の間にフェロモンの道を
生成し,仲間を大量に誘引し,効率的に採餌を行う.
エージェントがフェロモン場を用いてコミュニケーションを行う研究として,/ による 0
1 2 &012' がある.012 は,巡回セールスマン問題などの組合せ最適化問題を
解くのに用いられている.この最適化手法は,以下のステップを経る3 4' 多数のエージェントが
環境に揮発性のある情報 &フェロモン' を残す,-' 時間経過によってフェロモンが揮発する.解の
経路が短ければフェロモンが蒸発するよりも早く補強されるため,フェロモン濃度が高いまま保
たれる.その結果,短い経路が選択されるという手法である.環境が動的に変化する実世界では,
このように自律分散に問題を解く手法は有効な手法であり,フェロモン・コミュニケーションをロ
ボティクスにおける個体間のコミュニケーション手段として積極的に検討する価値がある.
本研究では,実世界におけるロボット間のコミュニケーション方法としてフェロモン・コミュニ
ケーションを提案し,その有効性を検証する.具体的には,個体数・活動環境の増減に対する「拡
張性」,フェロモンの濃度に関する「濃度依存性」,コロニー・サイズの「拡張性」について計算
機シミュレーションと実機による実験から検証する.
目次
序論
はじめに
群れとは
個体間のコミュニケーション方法
フェロモン・コミュニケーション
ロボティクスとしてのコミュニケーション方法
関連研究
ロボット群に関する研究
センサ・ネットワーク技術に関する研究
ロボットの地図共有に関する研究
蟻に関する研究
群ロボットにおけるフェロモン・コミュニケーションの応用可能性
鉱山におけるフェロモン・コミュニケーションの応用
大規模工事におけるフェロモン・コミュニケーションの応用
人体におけるフェロモン・コミュニケーションの応用
フェロモン・コミュニケーションにおける性質
群れのパフォーマンスに対するエージェント数の拡張性
群れのパフォーマンスに対する活動環境サイズの拡張性
群れのパフォーマンスに対するフェロモンの濃度依存性
群れの規模に対するロバストネス
研究目的
群行動アルゴリズムとシミュレーション・モデル
群行動の設計方法論
環世界 とは
環世界概念の再考
群行動への応用
群行動におけるフェロモン・コミュニケーション
群行動アルゴリズム
環世界を用いたフェロモン・コミュニケーションを行う群行動アルゴリズム
の設計
フェロモン・コミュニケーションを行う群行動アルゴリズム
主体・客体間接触処理
シミュレーション・モデル
エージェント・モデル
フェロモン・モデル
フェロモン・トレイルの敷設と追従のメカニズム
ロボット群の開発
センサ構成
フェロモン・センサ
センサ
受光素子・接触センサ
フェロモン放出機構
全体構成
ハードウェア構成
システム構成
フェロモン・コミュニケーションの実現
計算機シミュレーション実験
計算機シミュレーション設定
計算機シミュレーション結果
ロボット群実験
ロボット群実験設定
ロボット群実験結果
結論
ロボット群におけるフェロモン・コミュニケーションの性質の解明
群れのパフォーマンスに対するエージェント数の拡張性に関する性質
計算機シミュレーション実験
ロボット群実験
議論
結論
群れのパフォーマンスに対する活動環境サイズの拡張性に関する性質
計算機シミュレーション実験
ロボット群実験
議論
結論
群れのパフォーマンスに対するフェロモンの濃度依存性に関する性質
計算機シミュレーション実験
ロボット群実験
議論
群れの規模に対するロバストネス
計算機シミュレーション実験
議論
結論
まとめ
議論
結論
今後の展開
ロボット単体の最適設計
同質 な個体で構成される群れ
静的な環境下での群れ
動的な環境下での群れ
異質 な個体で構成される群れ
謝辞
付録
実験による蒸発係数の導出
フェロモンの時間経過と重量
蒸発係数の導出
図目次
! "
# $ % % $ ! &'
(# ! # ) * ) % +,-$.
/ 0 ) )% 0
(# # % )# ! %
12( 134$
5 ,% 0 #
3#, 0 ."& 0 5 (# ! 2 % 0 ! ! ! % ! # ) (
4 % # .#0 ! 67,
.#0 ! 8 () ! 6 # ! /$- 0 (0
(, ! 9 6 # ! #) * )
() ! 0# % .63 5 " 0 ! & ! 0# %
) ) : ; &0: <=
$># ) : ; &0: <=
. # % #! ! # ) 0 )% ! ) ) : ; &0: <=
) ) :; &0: <=
) ) :; &0: <=
) ) : ; &0: <=
) ) :; &0: <=
. # % #! ! # ) 0 )% ! %
$># ) :; &0: <=
$># ) : ; &0: <=
(# ! ) 0 ># ) . 0) ! #? <=
(# ! ) 0 ># ) . 0) ! #? <=
. # % #! ! # ) 0 )% ! . # % ! Æ 0 )% ! ) &0: ; ; ; ; <=
. # % #! ! # ) 0 @
! &0 ) )
) ) :; &0: <=
) ) :; &0: <=
) ) :; &0: <=
) ) :; &0: <=
) ) :; &0: <=
. # % #! ! # ) 0 @
! &0 $># )
$># ) :; &0: <=
$># ) :; &0: <=
. # % #! ! # ) 0 @
! &0 ) 0 ># )
. # % ! Æ 0 )% ! 90: <=
. # % ! Æ 0 )% ! 90: <=
. # % ! Æ 0 )% ! 90: <=
. # % ! Æ 0 )% ! 90: <=
. # % ! Æ 0 )% ! 90: <=
) :; &0: <=
. # % #! ! # ) 0 # $># ! 0#0 ! # $># ) ! 0#0 ! # ) 0 ># ) ! 0#0 ! # ) ! % ! &0: ; ; ;
; ; ; ; ; ; <= ) ) : ; &0: <=
) ) :; &0: <=
) ) :; &0: <=
) ) : ; &0: <=
) ) ! % ! &0: ; ; ;
; ; ; ; ; ; <= . # % @ 0 ! ! $># ) ! # # * 0 # Æ
表目次
0 ) 4 ) 0 0
) ! # ) ) ) : ; &0: <=
$># ! # ) $># ) : ; &0: <=
) ! % ! )% ! $># ! % ! )% ! ) ! % ! &0 @
) ) ! &0 %
$># ! &0 %
$># ) ! &0 %
) ) ! ! Æ
) ! % ! # $># ! 0#0 ! # $># ) ! 0#0 ! # ) ! % ! * 0 # Æ
第 章
序論
本章では「群れ」の一般的な説明を行う. 節では生物が行う個体間コミュ
ニケーション方法としてのフェロモン・コミュニケーションの性質の説明を行
う.フェロモン・コミュニケーションとは,環境に情報を残すことによって間
接的に他個体に情報伝達を行う手法である.この手法は,社会性昆虫である蟻
や白蟻が行っている.特に,蟻のフェロモン・コミュニケーションは採餌行動
時などに行っていることで知られている.本研究では,蟻が採餌行動時に用い
ている道標フェロモンに注目する.
節では群ロボットにおけるフェロモン・コミュニケーションの応用可能性
を述べる.環境に情報を残すというコミュニケーション手法は,多数の個体の
集団で効果を発揮する.本節では,ロボット群がフェロモン・コミュニケーショ
ンを行うことで期待される効果と応用範囲について言及する.
節では,フェロモン・コミュニケーションに関する関連研究を紹介する.
フェロモン・コミュニケーションに関する研究には, 仮想フェロモン, 化
学物質と 種類の研究手法がある.本節では,その他にもロボット群に関する
関連研究を挙げて本研究と他研究の差別化を行う.
節ではフェロモン・コミュニケーションに関する種々の解明・理解すべき
性質を述る.ロボット群がフェロモン・コミュニケーションを行う上で 個体
数に関する拡張性, 活動環境サイズに関する拡張性, フェロモンの蒸発時
間に対する応答, 群れの規模に対するロバストネスが既知であることが望ま
しい.そのため,本節ではこれらの性質について本研究で行う計算機シミュレー
ション実験,ロボット群実験に関する実験設定を行う.
最後に 節にて研究目的を述べる.
第
章 序論
はじめに
本節では,群れの一般的な性質について述べる.
「群れる」という行為は,生物にとって生存可能
性を上げる.生物は群れることで捕食者に対して対応 対抗 する.また,個体間のコミュニケー
ションを密にすることによって高度な社会構造を構築することすらある.生物の個体間コミュニ
ケーションには,機械的・視覚的・化学的な手段がある.フェロモン・コミュニケーションとは,
化学的なコミュニケーション方法であり,他のコミュニケーションにはない特徴が複数ある.
群れとは
群れは自律分散系である.そして,一般的に以下のような特徴を有していることが知られている.
・ 群れは自律的なエージェントで構成され,中央制御システムを持たない.
・ エージェントは大域的情報を持たず,環境中の局所的情報のみで活動する.
昆虫における例としては,蟻,ハナバチ,社会性狩バチや白蟻などが挙げられ,哺乳類では,人,
サル,ライオンなどの生物の社会システムが該当する.9 に蟻の群れ,9 にニホンザ
ルの群れを示す.
9 ? ! "
9 ? 生物が群れる行為には,個体の生存可能性を上げるという大きなメリットがある.積極的な理
由の例としては,採餌行為が効率的に行われ生存可能性が上昇することが挙げられよう.複数体
で広い範囲を探索し,その位置情報を共有することができれば生存可能性は飛躍的に高まる.蟻,
白蟻,ハナバチの集団は,広い範囲を探索し,フェロモンによって環境に情報を残し,情報共有を
行う.消極的な理由の例としては,外敵からの攻撃に対抗するという理由があろう. 体の個体で
構成される集団が外敵 体と仮定 に襲われるとき,個体の襲撃を受けるリスクは に減じる.
前者のように生物が積極的に群れる場合,集団内で情報を共有する必要がある.
「個体の集まり」
から「群れ」に至るには,個体間の相互作用が必要であろう.このように生物が密に相互作用し,
集団が一個の生物のように振る舞うことは超個体と呼ばれる.次節では,生物における個体間の
コミュニケーション方法について説明する.
第
章 序論
個体間のコミュニケーション方法
前節で述べた個体の集合が密に相互作用を行うためのコミュニケーション方法は複数存在する.
松香ら < = によると,昆虫の他個体とのコミュニケーション方法は,以下の つに分類することが
できる.
・ 化学的コミュニケーション
・ 機械的コミュニケーション
・ 視覚的コミュニケーション
これらのコミュニケーション方法について以下で詳しく説明する.
化学的コミュニケーション
動物はさまざまな化学物質を体外に分泌排出しているが,そうした化学物質が種内あるいは種
間の情報伝達の手段として重要な役割を果たしている場合がある.化学物質による個体間の情報
交換を化学的コミュニケーションといい,一般に,同種間の化学的コミュニケーションに使われ
る化学物質をフェロモンと呼ぶ.フェロモンは動物の体内でつくられ,体外に分泌されて,同種
の他の個体に特定の行動を引き起こす化学物質の総称である.動物の中には,この物質によって
求愛や交尾などの配偶行動を行ったり,仲間に敵の近づいたことを知らせるものもいる.9 に化学的コミュニケーションの例として蟻の道標フェロモンの追従を示す.
9 ? # 機械的コミュニケーション
機械的コミュニケーション方法とは,音,振動,接触によるコミュニケーション方法である.機
械的コミュニケーションの例として,9 にコウモリのエコロケーションを示す.このコミュ
ニケーション方法は,発信者・受信者が接触したり出会ったりする必要がないため,障害物があっ
たり距離的に隔たっていても,暗闇のなかでも有効な通信方法である.また,音は速く通過し,痕
跡も残さない.この点,音によるコミュニケーションは化学的コミュニケーションにはない特性を
第
章 序論
9 ? $ ! &'
9 ? $ % % もつといえる.音のもつこのような特性から,この種のコミュニケーション手段は,水中 魚類,
解散哺乳類など,空中 有翅昆虫,鳥類など などの三次元空間を自由に活発に行動する動物群に
とくに発達している.
視覚的コミュニケーション
動物が視覚的コミュニケーションの信号として使用する形質には,体全体の姿勢や動作・表情,
体色や模様 色彩のパターン,光の点滅のパターンやタイミングなど様々なものがある.動物は
これらの形質を,独立に,または,組み合わせて使用することにより,ほとんど無限に近い数の信
号をつくることができる.9 に,視覚的コミュニケーションの例として,蛍の発光を示す.
さらに," <= は,コミュニケーション方法の分類を化学的,聴覚的,視覚的,触覚的に分
類している 4 % .化学コミュニケーションは,伝達距離が長く ,聴覚的,視覚的,触覚的
チャネルと比較して伝達速度は遅い.夜間の利用に適しているが,風などで拡散してしまうため
発信者の定位は困難であるが,発信者の信号産出のエネルギーコストは少ないと報告している.
4 % ? 0 信号のチャネル
化学的 聴覚的 視覚的
伝達距離
長い
長い
中程度
伝達速度
遅い
速い
速い
夜間の利用
適
適
不適
発信者の定位
困難
容易
容易
発信者の信号産出エネルギーコスト
小
大
小∼中
蛾の雄は数 先から雌の性フェロモンを追従する
触覚的
至近
速い
適
容易
小
第
章 序論
本研究では,個体間の相互作用のためのコミュニケーション方法として,化学的コミュニケー
ションに着目する.次節では,実際の化学的コミュニケーションの情報伝達物質であるフェロモ
ンについて言及する.
フェロモン・コミュニケーション
フェロモン フェロモンとは,生物が体内で生成して体外に分泌後,同種の他個体に一定の行動や発育の変
化を促す化学物質の総称である <=.フェロモンは,リリーサ・フェロモンとプライマ・フェロモ
ンの 種類に大別される < =.以下にフェロモンの種類とその役割をを説明する.
リリーサー・フェロモン 触発フェロモン
性フェロモン 配偶行動に関与するフェロモンで,一般に雌が分泌し,雄がそれを感受して配偶行動が解発
される.
警報フェロモン 集まって生活している昆虫では,その集団の一部の個体が他の動物によって攻撃されると,
その個体はある種の化学物質を分泌発散させて,集団のなかまに危険の迫ったことを知ら
せる.
道標フェロモン 蟻,ミツバチ,白蟻のような社会性昆虫では,食物のある場所を巣内の仲間に知らせるのに,
食物を見つけた個体は,巣への帰り道にある種の化学物質をつけておく.
集合フェロモン 集団を形成するのに必要なフェロモン.
プライマー・フェロモン 引き金フェロモン
女王物質 蜂,蟻,白蟻などの社会性昆虫の集団を構成する女王,王,働きバチなどの階級の分化と維
持をコントロールする物質.交尾の際に雄を誘引する働きや新コロニー形成時に働きバチを
安定させる作用もある.
本研究では,リリーサ・フェロモンである「道標フェロモン」に注目して研究を行う.群れは
多数の個体から構成され,広大な空間を探索し複数の対象物を収集することが可能である.蟻は
道標フェロモンを用いることで群れで効果的に採餌する.道標フェロモンを用いたコミュニケー
ション方法には,化学・可塑・間接・局所的な特徴がある.道標フェロモンは,化学物質で揮発性
物質であり時間と共に蒸散する.また,個体は環境中のすべての他個体と通信するわけではなく
フェロモン・トレイル * ; 道標フェロモンが敷設された経路 上を通過する個体に
情報伝達 コミュニケーション が行われる.群行動とは局所的な情報の相互作用によって全体の
行動が創発される現象である.真社会性昆虫と呼ばれる蟻・ハナバチ・狩バチ・白蟻は,フェロ
第
章 序論
モン * を用いて群れの仲間とコミュニケーションすることで高度な群行動を実現して
いる <=.彼らは,フェロモンによって環境に情報を付加している.また,この情報は,環境に一
様に分布しておらず,生物にとって意味のある箇所に適切に付加される.このフェロモンを用い
て環境に付加された情報分布を「フェロモン場 * &0」と定義する.
コミュニケーション 一般的に,コミュニケーションは「個体 のなんらかの行動変化に対応して,個体 5ないし個
体 (; -… になんらかの行動変化を生じさせる.
」と定義される <=.本論文で考えているフェロモ
ン・コミュニケーションは環境を通して個体間のコミュニケーションが行われる.個体は環境に情
報を出力し,環境から情報が入力される.つまり,9 に示すように,フェロモン・コミュニ
ケーションとは単純なエージェント間のコミュニケーションではなく,環境を含んだエージェント
間のコミュニケーションである.本コミュニケーション手法におけるコミュニケーションの成立
条件を「個体Aが環境に及ぼしたなんらかの変化に対応して,自身を含む他個体 個体A; 5; (…
になんらかの行動変化を生じさせる.
」と定義することができる .
Agent A
Agent A, B or C・・・
Info.
Info.
Environment
9 ? (# ! # ) エージェントがフェロモン場を用いてコミュニケーションを利用する研究として,- によ
る ( 3#@ (3 がある <; =.(3 は,巡回セールスマン問題などの組合せ
最適化問題を解くのに用いられている.巡回セールスマン問題におけるこの最適化手法の手順を
説明する.
多数のエージェントが環境に揮発性のある情報 フェロモン を残す.
時間経過によってフェロモンが揮発する.
フェロモン量に応じてエージェントが経路を選択する.
良質な解 解空間上の経路 にはフェロモンが蒸発するよりも早く補強されるため,フェロモン濃
度が高いまま保たれる.その結果,良質な解 最短経路 が選択されるという手法である.環境が
動的に変化する実世界では,このように自律分散に問題を解く手法は有効な手法であり,フェロ
モン・コミュニケーションをロボティクスにおける個体間のコミュニケーション手段として積極的
に検討する価値がある.
「環境に情報源を残す」という点において,化学物質を用いて環境に情報を残してロボット群に
コミュニケーションさせることは,環境に無線モジュール アクセスポイント を設置することと
フェロモン・コミュニケーションでは,個体 が環境に残した情報を個体 が取得することもあり得る.
第
章 序論
等価である.後者の場合,広い環境を移動するためには非常に多くの無線モジュールを必要とす
る.これに対して,化学物質を用いたコミュニケーションでは物質を環境に撒くだけで済み,情
報の持続時間のコントロールも化学物質の分子量や混合比によって選択可能である.また,フェ
ロモン場は時間が経過することで蒸発・拡散し,消失していく.例えば,採餌行動を考えた場合,
運搬が完了した物体へフェロモン・トレイルを敷設しなければ,環境に残された情報の更新が行
われなくなり,環境の情報は消えて無くなる.これに対し,無線技術を用いる場合は無線モジュー
ルを再配置しない限り無駄になってしまう.本研究では,
「環境に情報を付加し,相互にコミュニ
ケーションを行う」という課題の簡単化のために無線モジュールではなく化学物質を用いる.
ロボティクスとしてのコミュニケーション方法
前述のように,生物では機械・光学・化学的な方法を用いてコミュニケーションを行っている.
しかし,ロボティクスでは電磁波を用いて互いに情報を伝達する手法が発達している.電磁波は,
波長が長い順に電波・赤外線・可視光線・紫外線・7 線・γ線と区別されている.現在,電磁波を
用いた情報伝達手法は高度な発達を遂げており,一般社会の隅々まで普及している.例えば,無
線 / などは非常に成功している例の一つであろう.しかし,これらの情報伝達手段は送信者が
発信しているときのみ受信者は受信可能であり,情報の連続性が全くない.
電波による情報伝達
電波によるコミュニケーション手法は,工学的に最も成功している情報伝達手法である.4 %
に電波による情報伝達手法を示す.
4 % ? ) 略称 周波数
波長
極々超長波
/9 , A@
;" , ;"
極超長波
B/9 , A@
;" , "
超長波
+/9 , "A@
" , "
長波
/9
, "A@
" , "
中波
19
, "A@
" , "
短波
A9
, 1A@
" , 超短波
+A9 , 1A@
, 極超短波
BA9 , 1A@
, センチメートル波 A9 , 6A@
, ミリ波
$A9 , 6A@
, 周波数帯
4 % に示すように,電波は周波数毎に波長が異なる.この特徴を活かして様々な用途に用
いられている.例えば,極々超長波は非常に波長が長いことから潜水艦の通信に用いられている.
また,センチメートル波は波長が短く遠距離の通信には向かないが情報量を多くすることが可能
であるために無線 / などに用いられる.ロボットの個体間通信には,日本国内では電波法に基
づく小電力データ通信システムの無線局の無線設備となるため,法令の基準に適合する機器およ
第
章 序論
び利用法による場合には免許が不要である無線 /(極超短波もしくはセンチメートル波)が用
いられることが多い.しかし,情報の連続性は全くない.唯一,後述するセンサ・ネットワーク
技術のみが情報の連続性を実現可能であるが,致命的な問題点も同時に抱えてしまう.
赤外線・可視光による情報伝達
無線 / の普及以前は 2- 規格に準拠した赤外線通信がケーブルレス通信の主な手段であっ
た.赤外線通信の通信可能距離はおおむね 程度であり,通信可能な角度も 程度である.電
波で通信する方式に比べて,信号が空間的に広がりにくく(回折を起こさず),障害物があると通
信できない欠点はあるものの,それは第三者に傍受されにくいというセキュリティ上の大きな長
所でもある.この赤外線・可視光による通信も情報の連続性は全くない.また,電波を用いたセ
ンサ・ネットワーク技術のような手法もない.
このことから,群ロボット間のコミュニケーション手段として電磁波を用いた通信手法は適さ
ない.次節では,フェロモンを用いたロボット間のコミュニケーション手法に関する研究を紹介
する.
第
章 序論
関連研究
本節では,本研究に関する関連研究を紹介する.本研究では,ロボット群の個体間コミュニケー
ションの手段としてフェロモン・コミュニケーションを提案する.先ず,ロボット群に関する研究
を紹介し,それらの研究と差別化を行う.さらに,
「環境に情報源を残す」という共通点を持つセ
ンサ・ネットワーク技術にも触れ,それらの技術の問題点を指摘し,ロボット・コミュニケーショ
ンにフェロモン・コミュニケーションが有望であることを示す.最後に,最新の蟻に関する研究を
紹介し,ロボティクス分野で昆虫学に貢献可能かどうかを検討する.
ロボット群に関する研究
本研究の最終目標は,群れによる物体の運搬である.このとき,エージェントには以下の機能
が必要である.
物体の探索と他個体の誘引
運搬対象物体や他個体との力学的干渉
エージェントは運搬に必要なエージェント数を * 周辺に呼び集める必要がある.この目的に対
して,蟻が採餌時に用いている道標フェロモンというコミュニケーション方法は非常に有効な手
段である.蟻は,道標フェロモンを使うことによって自己の知能を高度に発達させることなく,環
境に情報を付加することによって問題を解決している.
の研究として,仮想的にフェロモン場を実現した研究と現実のフェロモンを用いた研究があ
る.仮想的なフェロモンを用いた研究として,) ら <
= や ら <= によるプロジェ
クターでフェロモン場を投影し,スクリーン上でロボット群の採餌行動を実現している +,-$.
という研究がある 9 .これらの研究では,仮想的なフェロモン場をうまく設定することに
よって衝突現象にとらわれることなく,ロボット群に仮想フェロモンを用いたコミュニケーション
をさせることに成功している.この手法は,フェロモンの蒸発・拡散を任意に設定できることか
ら計算機シミュレーションと同様に正確な実験条件を与えることができる.しかし,実際の化学
物質のもつ環境依存性の強い揮発・拡散特性を無線・有線通信あるいはプロジェクターにより実
現し,実環境を再現できる仮想フェロモン場として生成するためのソフトウェアやパラメータ設
定は非常に困難である.
Projector
PC
CCD
Camera
Robots
Projected CG image
9 ? * ) % +,-$.
また,実際のフェロモンを用いたロボット研究として,下山ら < = は実際の昆虫の触覚とフェ
ロモンを用いてフェロモン追従行動を単体のロボットで実現した.しかし,群行動については考
第
章 序論
察されておらず,また群ロボットにおいて生体材料を用いることには限界がある.*) 0C C
ら < = は, 種類の化学物質と化学センサ用いて群ロボットを誘引させることに成功している 9
.しかし,残念ながらリーダー・ロボットがフェロモンを発し,スレイブ・ロボットがそのフェ
ロモンをトリガーに行動するという機能分化されたシステムであり,単一の個体で構成される群
がフェロモンによるコミュニケーションを行い相互作用するという機能を有していない.
9 ? / 0 ) )% 0
5 の研究として,ロボット群による協調運搬の研究がある.D)% ら < = は,運搬対象物体を
発光させ,ロボット群に物体を協調して運搬させることに成功している.また,6Eら < = は,
D)% らの研究のように運搬対象物体を発光させるだけでなく,ロボット自身が発光し,他個体に
情報を伝えることによって,ロボットたちが連結して物体を運搬させることに成功している 9
.しかし,これらの研究では,フェロモン場のような化学物質を用いて間接的にコミュニケー
ションする方法をとっていない.
9 ? (# # % )# ! %
センサ・ネットワーク技術に関する研究
フェロモン・コミュニケーションと同じく,
「環境に情報源を残す」研究として,ユビキタス情
報環境やセンサ・ネットワークの研究として無線モジュールなどを環境に設置し環境を知能化す
る研究が複数報告されている.具体的には,12( 134$9 ,1 社の ,5 ,
第
章 序論
欧州における , による F%,東京大学の B,()% などがある < =.これら
の研究は,直接無線モジュールを環境に設置することで環境を知能化する.しかし,これらすべ
てのモジュールには電源という問題が付き纏う.例えば,森林環境の変化を計測する自然科学分
野向けの大規模なセンサ・ネットワーク用デバイスを考える.このとき,バッテリを搭載したセン
サ・ネットワーク用デバイスを万単位で森林に配置することになろう.仮に経年劣化が少なく,エ
ネルギー密度の高い超高性能バッテリをしようして 年間そのセンサ・ネットワークが動き続け
られたとしても,いずれバッテリは消耗する.そのとき,森林に配置された万単位のセンサ・ネッ
トワーク用デバイスのバッテリを交換することが果たして可能であるか,という問題が指摘され
ている.
9 ? 12( 134$
また近年,複数のレスキューロボットによる広大な環境の探索を目指す研究が盛んに行われて
いる.ロボット 台の無線端末からの無線通信のみで運用するとなると,活動領域が限定的なも
のになる.そのため,ロボット同士を経由するネットーワークを構築する研究 < = や無線端末を
環境に敷設したりする研究 < = が行われている.
これらのデバイスに対して,化学物質を用いたコミュニケーションは非常にシンプルなコミュ
ニケーションであり,それゆえ通信可能な情報量は現状の無線モジュールに比べて少ない.しか
し,時間経過とともに情報が揮発するため,環境負荷が少ないという利点もある.複数の化学物
質を検出することのできる化学センサが開発されれば情報量の問題は解決可能であり,そのよう
な研究成果も報告されている < =.このように,ロボット群に関する研究,フェロモン・コミュニ
ケーションに研究は独立して行われており,ロボティクスにおける個体間コミュニケーション方
法としての研究は行われていない.そこで,本研究ではロボット間のコミュニケーション方法と
してフェロモン・コミュニケーションを提案する.
ロボットの地図共有に関する研究
レスキュー・ロボットでは,移動し周辺環境をセンシングし,地図を作成する.作成した地図
を,救助隊員や他のロボット・オペレータと共有することによって救助活動を効率的に行うこと
を目的として研究が進んでいる.佐藤ら < = は,災害現場での利用を考慮した地図として「情報
の共有が容易」,
「現場の状況を簡単に把握」するための地図を提案した 9 .この地図で
は,特徴的な環境における周辺情報と,そこまでの距離と移動方法が分かるように作成されてい
る.この分野の研究は,環境の写像である地図に情報を付加しているという点では,フェロモン・
第
章 序論
コミュニケーションと同じ機能であるが,自律分散的な手法ではなく中央のサーバにある地図を
更新するという手法が用いられている.
9 ? 5 ,% 0 #
蟻に関する研究
蟻に関する研究は,近年進みつつある.そのなかでも,勝又らの報告が詳しい < =.その研究
報告の一部を抜粋して紹介する.蟻は世界で約 種が記載されており,新種の発見が続けば約
万種に到達すると推定されている.この極めて大きなグループは約 億年前にスズメバチ上科か
ら派生したものでいくつかの亜科に分けられ,そこから更に族,属,種へと分化している.蟻は
地理的にもっとも広く分布し,生息環境はツンドラから砂漠まで多様であり,バイオマスにおい
ても最も優先的であるとされている.現在のところ,その生態や行動整理について調べられてい
る種は約 種程度,組織だって徹底的に調べられているものは 種程度であり,他は自然史的
記載にとどまり,生息地と営巣場所以外知られていない.
蟻が用いるコミュニケーション手段として以下の方法が観察されている.地たたき ##,こす
りあわせ 0) ,打撃 ",つかみかかり #,触角でのタッチ ,
脚でのタッチ ,化学物質の放出 #)Æ となすりつけ " などの行動は同種他
個体への通信手段と考えられている.これらの手段は他個体に,視覚,聴覚,触覚,化学感覚を
通して特別な影響を与え,様々な行動を引き起こさせる.また,蟻は嗅覚や味覚に関わる化学的
信号をほとんどすべての通信手段に用いていると考えられているとされている.蟻における重要
なケミカル・コミュニケーションの例を以下に紹介する.
自他の識別
・ 巣仲間識別・血縁識別 ・D ・ カースト識別 ( 第
章 序論
・ 役割識別・個体の生理状態の識別 4 " #&) ・- 0 ! )
また,蟻の社会的な行動として以下のフェロモンを用いたコミュニケーションによる行動の創
発現象が盛んに研究されている.
自他の識別
・ 道しるべフェロモン 4 #
・ 警報フェロモン #
さらに,同一の化学的なシグナルを得たとしても蟻の置かれた状況や整生理状態によって異な
る振る舞いを示すことを指摘している研究もある.
識別感度と行動の調整
・ 感覚神経における識別感度の調整
・ 生体アミンによる行動の調整
上述の研究分野はそれぞれ蟻の化学シグナルが生体にどのような影響を及ぼすかを調査している.
一般的に生物研究では,行動中の生体の内部状態を観測することは非常に困難である.社会性
昆虫である蟻などの生物は,集団行動中の内部状態を観察することはほとんど不可能であると言
われている.対して,ロボットや計算機シミュレーションを用いた研究では,行動中の個体の内
部状態まで観察することが可能である.このことから,ロボティクスを用いて集団行動であるフェ
ロモン・コミュニケーションを検討することは意義がある.
第
章 序論
群ロボットにおけるフェロモン・コミュニケーションの応用可能性
本研究では,ロボット群のコミュニケーション方法としてフェロモン・コミュニケーションを
提案する.9 に示すように,フェロモン・コミュニケーションは個体間のコミュニケーショ
ンではなく,環境を含んだコミュニケーションである.
「環境に情報源を残す」という点において,
化学物質を用いて環境に情報を残してロボット群にコミュニケーションさせることは,環境に無
線モジュール アクセスポイント を設置することと等価である.後者の場合,広い環境を移動す
るためには非常に多くの無線モジュールを必要とする.これに対して,化学物質を用いたコミュ
ニケーションでは物質を環境に撒くだけで済み,情報の持続時間のコントロールも化学物質の分
子量や混合比によって選択可能である.また,フェロモン場は時間が経過することで蒸発・拡散
し,消失していく.例えば,採餌行動を考えた場合,運搬が完了した物体へフェロモン・トレイ
ルを敷設しなければ,環境に残された情報の更新が行われなくなり,環境の情報は消えて無くな
る.これに対し,無線技術を用いる場合は無線モジュールを再配置しない限り無駄になってしま
う.本研究では,
「環境に情報を付加し,相互にコミュニケーションを行う」という課題の簡単化
のために無線モジュールではなく化学物質を用いる.
フェロモン・コミュニケーションの本質は,
「環境に揮発性のある情報を残す」ことである.第
節で述べたように,多数の個体で構成される群れが群れにとって意味のある箇所に揮発性の
ある情報を添加することで間接的に他個体と情報共有を行う.この特殊なコミュニケーションの
特徴は,ロボット群にとって以下のような環境で有用であると考えられる.
鉱山におけるフェロモン・コミュニケーションの応用
ダイアモンドやレアメタルなど付加価値の高い物質は,鉱脈として存在する.つまり,資源は
環境に均一に分布しておらず,偏在している.現在,このような環境で目的の物質を得るために
露天掘りのような大規模な採掘手法が用いられている 9 .
9 ? 3#, しかし,露天掘りのような大規模な掘削作業は環境の植生を壊滅的な状況に追い込んでしまう
ことが広く知られている.このような手法に対し,ロボット群とフェロモン・コミュニケーショ
ンによる解法は有効であろう.鉱脈を発見した個体が鉱脈を発見した箇所に揮発性のある情報を
残し,他個体を誘引する.鉱脈の規模が大きければ,さらなる情報が添加され,大量動員に繋が
り,目的の物質を効率良く得ることができる.また,目的の物質を採取することができなくなれ
ば,環境に情報は添加されなくなり,動員は止まる.
第
章 序論
大規模工事におけるフェロモン・コミュニケーションの応用
鉱山と同様に,大規模な工事などにも応用が可能であろう.例としては,整地,埋め立てが主
なタスクとなるダム建設などが挙げられよう.特に,岩石や土砂を積み上げて建設する型式のダ
ムであるアースダムやロックフィルダム 9 の建設には有用である.
9 ? 0 ."& 0 基準面に対して凹凸があれば,その地点に揮発性のある情報を添加する.その結果,仲間の個
体が誘引され整地,埋め立て作業が行われる.水準面に対して大きな凹凸があれば,その箇所に
は多くの情報が添加されることになり,動員が加速され,多くの個体が動員されることで作業が
加速する.
人体におけるフェロモン・コミュニケーションの応用
ミクロな例としては,人間の体内での応用がある.脳腫瘍などの病巣は摘出する際に人体にとっ
て重要な機能を持つ脳内に存在するために,摘出することが困難なことで知られている 9 .
このようなタスクにもロボット群とフェロモン・コミュニケーションは有用である.血管内にロ
ボットを投入し,ロボットが病巣を発見し,患部に薬剤を添加する.薬剤は,病巣から血管を通っ
て流出する.この薬剤がロボットにとって誘引物質として働けば,体内で他個体を誘引し,病巣
に多くのロボットが動員される.
9 ? 5 上述の例のように,
「環境に情報を残す」,
「情報が時間と共に消失する」というコミュニケーショ
第
章 序論
ン方法は,フェロモン・コミュニケーション特有の特徴であり,工学的にも応用可能性が大きく,
ロボティクスにおける個体間のコミュニケーション方法として真剣に検討する価値がある.
第
章 序論
フェロモン・コミュニケーションにおける性質
本節では,フェロモン・コミュニケーションの諸性質について触れ,問題を設定する.ロボット
群がフェロモン・コミュニケーションを行う上で以下の性質を理解する必要が考えられる.
まず,限定された活動環境に何体の個体を投入すれば,どの程度の成果が得られるかを知る必
要がある.群ロボット系は自律分散系であり,個体の相互作用の結果として全体のパフォーマン
スが決定される.そのため,個体数によって群れの振る舞いが異なるからである.次に,限定さ
れた個体数を任意の環境に投入したときの群れのパフォーマンスを検討する必要がある.前述の
条件では,活動環境が広大な場合,個体が遭遇する機会の減少が想定でき,群れのパフォーマン
スが下がることが考えられる.本研究では,フェロモンの代用にエタノールと水の混合液を用い
る.混合比によって揮発時間を変化させることを実現している.フェロモンが任意の揮発時間の
ときに,群れの挙動がどのように変化するのかを検討することは,実環境で温度・湿度が変化す
る中で群ロボット系を運用するときに必要な知見となるであろう.最後に,群れの規模(個体密
度を固定)を変化させたときの群れの挙動を観測する必要がある.大規模な環境で多数の個体を
運用するとき,事前に小規模な環境で少数の個体を運用するのが等価であれば,大規模な群れを
見積もることが可能になる.
以下にそれぞれの問題の詳細を説明する.
群れのパフォーマンスに対するエージェント数の拡張性
群れは,多数の個体から構成される.構成個体は,同じ機能を有するため,エージェント数の
増減が群れの機能に影響することは無いが,機能の程度には影響を及ぼす.これは,活動環境内
のエージェントの密度の問題であると考えられる.環境内のエージェント密度が低いとエージェ
ント同士が環境内で出会う確率が減少する.その結果,群れに必要な密な相互作用が期待できな
くなり,機能低下することが考えられる.
この問題には, 節で取り組む.具体的には,活動環境のサイズを固定し,エージェント数を
操作する.このアプローチによって,エージェント数と群れのパフォーマンスの関係を調査する.
群れのパフォーマンスに対する活動環境サイズの拡張性
前述のように,活動環境内のエージェント密度が群れのパフォーマンスに影響を及ぼすと考えら
れる.エージェント密度は, 活動環境サイズを固定しエージェント数を操作する, エージェ
ント数を固定し活動環境サイズを操作する.という つのアプローチで調査することができる.こ
こでは,後者の手段を用いて群れのパフォーマンスに与える影響を分析する.
この問題には, 節で取り組む.具体的には,エージェント数を固定し,活動環境サイズを操
作する.このアプローチによって,活動環境サイズと群れのパフォーマンスの関係を調査する.
群れのパフォーマンスに対するフェロモンの濃度依存性
フェロモン・コミュニケーションでは,情報媒体に化学物質を用いる.具体的には,本ロボッ
ト・システムにおいて生物のフェロモンの代用としてエタノール ( A 3A を用い,昆虫の触角
第
章 序論
の代用としてアルコールセンサを用いる.予備実験の結果から,エタノールの混合比によってフェ
ロモン・コミュニケーションにトレード・オフ問題が存在することがわかった.フェロモンに高濃
度エタノールを用いると,センサのシグナル強度は高いが,シグナルの持続時間が短い.フェロ
モンに低濃度エタノールを用いると,センサのシグナル強度は低いが,シグナルの持続時間は長
い.活動環境やエージェント数に応じて適切な濃度のフェロモンを選択する必要があろう.
この問題には, 節で取り組む.フェロモンの濃度差による強度,持続時間を計測し計算機シ
ミュレーションと実機実験から群れにとって適したフェロモン濃度を選択することが可能である
か検討する.
群れの規模に対するロバストネス
一般的にマルチ・エージェントシステムにおいて,個体数に応じてアルゴリズムの設計方法が異
なることが知られている.例えば交通システムなどの場合,エージェント 車両 数が少なければ
渋滞を考慮する必要はないが,エージェント数が多くなれば渋滞を考慮したアルゴリズムを設計
しなければならない. 節, 節では,個体数と活動環境サイズを独立に検討しているが,活
動環境に対する個体密度を固定して計算機シミュレーションにより検討する.
第
章 序論
研究目的
本研究の大目的は,ロボット間のコミュニケーション手法としてフェロモンを用いたコミュニ
ケーション手法を確立することである. 節で指摘したように,ロボット群のコミュニケーショ
ン手段としてフェロモン・コミュニケーションを用いることは,大規模なタスクを局所的なコミュ
ニケーションのみで解決する可能性を持っており積極的に検討する価値がある.そこで,本論文
では 節で指摘した群れによる物体運搬に必要な機能のうち, 物体の探索と他個体の誘引に
ついて注目し,フェロモン場を用いて未知環境でコミュニケーションを行うロボット群の実現を
目的とする.本研究の独創性は,ロボット群がフェロモンを用いて環境を積極的に改変する点に
ある.つまり,9 に示すように,ある個体が環境に残した情報が他個体にとっての情報に
なる.この機能は,シロアリの研究で発見され,6 G によって と呼ばれている <=.
ロボット群は,活動環境を「餌を探す」というタスクに都合の良いようにフェロモン場を生成し,
自身らの活動環境を積極的に改変し,他個体と間接的にコミュニケーションする.群行動アルゴ
リズムを設計し,計算機シミュレーションを用いてアルゴリズムの妥当性を検討し,実際にロボッ
トを開発し群ロボット実験を行うことでフェロモン・コミュニケーションの諸性質に対してアプ
ローチする.
第 章において,計算機シミュレーションによって群行動アルゴリズムの有効性を検討し,実機
を開発し実験的にフェロモン・コミュニケーションを行うロボット群を実現する.第 章では,第
章で開発したフェロモン・コミュニケーションを行うロボット群の諸性質について検討する.
第
章 序論
第章
群行動アルゴリズムとシミュレーション・
モデル
本章では,群行動アルゴリズムの設計,シミュレーション・モデルの構築つ
いて述べる. 節では,群行動アルゴリズムを設計する指針について述べる.
設計指針には環世界 という生物が自己が有する感覚器を用いて自身
を取り巻く世界をどのように認識しているのかという概念を用いる.具体的に
は,単体のアルゴリズム内に他個体からのシグナルを入力として用いることで
他個体との相互作用を個体のアルゴリズム内に組み込んで群行動を創発させる.
節では,前節で述べた設計指針に基づき群行動アルゴリズムを設計する.
本研究では,蟻の採餌行動時の行動アルゴリズムを設計する.具体的には,巣
と餌の間にフェロモン・トレイル フェロモンの道 を生成することで,他個体
を誘引し,集団的に採餌を行うためのアルゴリズムを設計する.
最後に, 節では,計算機シミュレーションに用いるエージェントやフェロ
モンの蒸発モデルについて説明する.エージェントの設計では,実際に設計す
るロボットと同じ機能・仕様のエージェントを設計する.また,フェロモンの
蒸発に関しては予備実験から得られたデータに基づいてモデル化を行う.
第 章 群行動アルゴリズムとシミュレーション・モデル
群行動の設計方法論
群れは「生物や人が集まったさま」と辞書では定義される.本節では,群れという概念を原理
的な点から再考しアルゴリズムの出発点とする.具体的には,環世界という生物学の概念を用い
る.この概念は,生物単体が種固有の感覚器を通してどのように物理世界を認識しているかにつ
いて言及している概念である.この概念を群行動へと拡張することで群行動アルゴリズムを設計
する指針とする.
環世界 とは
群れというシステムは,設計対象は単体であるが,評価対象は総体であるという設計対象と評価
対象間にギャップがあることが指摘されている < =.この問題は,群れの設計を困難なものにして
いる.とくに密に相互作用するような群れを設計する場合,個体の小さな設計変更によって群れ全
体のパフォーマンスが大きく変化することは想像に難くない.この問題に対し,環世界 という概念を用いた群行動アルゴリズムの設計方法を提案する.群れの行動モデルの設計の前に,
) <= の提唱する環世界の概念を用いる.環世界とは,知
個体の行動モデルの設計として,B>"H
覚世界と作用世界で構成される生物の内に存在する世界を示す 9 .
Umwelt
Perceptual world
Effector world
9 ? (# !
知覚世界とは主体 生物 が知覚する全てであり,作用世界とは主体が行う作用全てである.知
覚世界・作用世界は,それぞれ知覚標識・作用標識によって構成されている.知覚標識とは,主体
生物 にとって有意な信号のまとまりを示す.また,作用標識とは,主体が客体 生物の外界に存
在する物 に対して与える意味のある信号のまとまりを意味し,自己の行動も含む.本研究で注目
しているのは,知覚標識とそれによって引き起こされる行動の設定である.以下に知覚標識と作
用標識の定義をまとめる.
知覚標識
・ 主体 生物 にとって有意な信号のまとまり
作用標識
・ 主体が客体 生物の外界に存在する物 に対して与える意味のある信号のまとまり
・ 自己の行動そのものも含む
環世界概念をダニの雌の交尾後の行動を例に具体的に説明する.交尾後に雌ダニは表皮全体の
光受容体を使って適当な潅木の枝先までよじ登る.その後,哺乳類の皮膚腺から分泌される酪酸
第 章 群行動アルゴリズムとシミュレーション・モデル
の匂いという刺激を受けて,枝先から身を投げる.そして,鋭敏な温度感覚によって Iなにか温か
いものJの上に落ちたことを知覚する.あとは,触覚によってなるべく毛のない場所を見つけ温か
な血液を吸血するのである.この例における知覚標識を以下に示す.
ダニの知覚標識
動物の出す酪酸
温かさ
動物の身体からもたらされる触覚
また, ; ; によって引き起こされる行動によってもたらされる作用標識は以下の つである.
ダニの作用標識
落下
体毛の少ない場所への移動
吸血行為
という知覚標識によって,落下するという行動が引き起こされ動物の身体に落下し, とい
う作用標識がもたらされる.その後, という知覚標識によって毛の少ない場所まで移動すると
いう行動が引き起こされ,その行動が という作用標識となる.さらに, という知覚標識に
よって吸血という行動が引き起こされ,その行動が という作用標識になる.ここで注目すべき
は,哺乳類の身体的特徴から雌ダニにとって知覚標識となりえるのが つの特徴のみであり,そ
れらが一定の順序で知覚標識となっている点である.ダニはこの知覚・作用標識の少なさにより
行動の確実性を確保している.
環世界概念の再考
節では,ダニを例に環世界概念を説明した.環世界概念は,
「知覚標識に基づいて行動し外
界に作用標識を与える」という概念である.この概念を群行動アルゴリズムに適用しやすくする
ために,以下のような再考を行う.
エージェントは,外界から知覚標識 #) を得る.
知覚標識によって内部状態を遷移させる.
新たな知覚標識を得るまで内部状態に固定された作用標識 )#) をとり続ける.
このプロセスは決定性有限状態オートマトンと同様である.
上記の環世界概念の再考に基づき,
各エージェントにとっての知覚標識を同定する.
それに対する内部状態決定する.
その内部状態でとるべき作用標識を同定する.
という設計方法が群行動アルゴリズムの設計に有効であると考えられる.この知覚標識・状態遷
移・作用標識という つのまとまりをエージェントの内部状態 以下 とし,群行動アルゴリ
ズムを設計する.
また,群行動アルゴリズムに不可欠な特徴として,以下の つが考えられる.
第 章 群行動アルゴリズムとシミュレーション・モデル
・ エージェントの環世界内に他エージェントが存在する.
・ 行動が他エージェントに依存している.
これらの帰結として,
「他エージェントの作用標識を自己の知覚標識とする.
」という特徴が挙げ
られる 9 参照.この特徴をふまえて群行動アルゴリズムを設計する必要がある.また,こ
の特徴を群の定義として用いる.
Umwelt
Perceptual world
Effector world
Umwelt
Perceptual world
Effector world
9 ? 2 %
0
ダニの例を用いて,環世界概念における知覚標識と作用標識が,どのような意味を持つのかを
主体の目的に基づいて考察する.ダニの行動の目的は,I生存Jつまり I血を吸うJという行為であ
る.ダニの「吸血行為」のためには、
「吸血が可能な場所に居る」ということを知覚できる知覚標
識が必要である.その知覚標識を得るためには,
「障害物 体毛 の少ない場所へ移動する」という
作用標識が必要となる.その作用標識を行うためには,
「他の場所よりも高い温度 生物の体」を
知覚できる知覚標識が必要となる.さらに,その知覚標識を得るためには,そもそも動物に接触
していなければならず,
「高い場所から身を投げる」という作用標識が必要である.この行為を行
うためには,動物が自身の下に存在することを知覚する知覚標識が必要になる.そこで必要にな
る知覚標識が「動物の出す酪酸」を知覚する知覚標識である.このように,主体の最終目的から逆
順に知覚標識と作用標識を同定することにより,行動アルゴリズムを構築することが可能である.
群行動への応用
生物は群れや社会を構成することが可能である <=.9 , にそれぞれムクドリ,イワシ,
ヌーの群れを示す.
上述の生物は「群れている」と言うことができる.この「同種の個体群が群れる」現象をロボ
ティクスの観点から見ると,同一のセンサ構成とアクチュエータを有していると考えることがで
きる.さらに,同種の個体集団であることから,コミュニケーション・プロトコル が共有化され
ていると考えられる.つまり,生物・ロボットに関わらず以下の条件が群れるための必要条件に
なる.
.
ネットワークを介してコンピュータ同士が通信を行なう上で,相互に決められた約束事の集合.通信手順,通信規
約などと呼ばれることもある.
第 章 群行動アルゴリズムとシミュレーション・モデル
9 ? !
9 ? !
9 ? !
同一のセンサ構成
同一のアクチュエータ
コミュニケーション・プロトコルの共有
同種個体で構成される群れは,これらの条件を満たしている .
群行動におけるフェロモン・コミュニケーション
本論文では, 節 コミュニケーション・プロトコルの共有のためにフェロモン・コミュニ
ケーションを用いる.フェロモン・コミュニケーションの優位性としては,以下の項目が考えら
れる.
対多コミュニケーション
節で述べたように,エージェントは環境に情報を残すことで他個体に情報伝達する.その
ため,個別にコミュニケーションを行わずに集団的な振る舞いに適している.一対一のコミュニ
異種個体が集まっている様子は共生や寄生と定義されている.
第 章 群行動アルゴリズムとシミュレーション・モデル
ケーションでは,情報が伝播するまでに長い時間がかかるため群行動を行う上でのコミュニケー
ション手段としては適さない.
揮発性のある情報
フェロモンは時間経過とともに蒸発し,意味消失する.この特徴も集団的な振る舞いには適し
ている.集団にとって意味のある箇所にフェロモンを塗布するアルゴリズムであった場合,意味
がなければ塗布されない.すなわち,意味のある箇所にはフェロモン場がより強化され,意味が
なければフェロモン場は消失する.この特徴は,他のコミュニケーション手段と比較して非常に
優位である.
情報の 濃さ
環境にフェロモンを塗布する場合,複数回塗布すればフェロモン場は強化される.つまり,よ
り I濃いJ情報になる.フェロモン場の強度が高い場合,多数の個体が作業していることを意味し,
低い場合には少数の個体もしくは作業が終了していることを示すことができる.このように,情
報の濃さで活動環境の様子を知ることが可能である.
上述のように,群行動を行う上でフェロモン・コミュニケーションは優位な特徴が多い.次節で
は,このように群行動を行う上で優れた特徴を持つフェロモン・コミュニケーションを行うため
の群行動アルゴリズムについて説明する.
第 章 群行動アルゴリズムとシミュレーション・モデル
群行動アルゴリズム
本節では, 節で提案する手法と 節で定義する群れの必要条件に基づいて群行動アル
ゴリズムの設計を行う.先ず,アルゴリズムには蟻の採餌行動を模する. 節で提案した手法に
基づき,群行動アルゴリズムを構築するのに必要な知覚・作用標識を導出する.そして,内部状
態を定義して群行動アルゴリズムを設計する.また,ロボット群を用いる研究であるため,計算
機シミュレーションでは無視することの多い衝突現象のモデル化を行う.
環世界を用いたフェロモン・コミュニケーションを行う群行動アルゴリズムの設計
本論文では,フェロモン・コミュニケーションを有効に生活に用いている蟻の採餌時の行動を
モデル化する.設定する群れの最終目的は,群れによって餌 * を巣 へ運ぶことであ
る.この目的のために,相互作用する機能はフェロモン・コミュニケーションのみとする.つま
り,フェロモン・コミュニケーションを行えば目的を達成することができる.以下,知覚標識には
,作用標識には という記号を用いる.
フェロモン・コミュニケーションを行うには,フェロモン・トレイルの敷設 が不可欠であ
る.フェロモン・トレイルは ・* 間に敷設されるため,エージェントは * を知覚 と への到着を知覚 する必要がある.また,フェロモン・コミュニケーションを行うには,
敷設されたフェロモン・トレイルを検出 し,そのトレイルと追従する 必要がある.さら
に,フェロモン・トレイルを見失った場合,適当な時間経過 を知覚し追従を諦めることが必
要である.これらの行動の初期状態として,* やフェロモン・トレイルの探索のため,ランダ
ム・ウォーク を行う.
以下に知覚標識と作用標識をまとめる.
知覚標識
! * との接触
への到着
フェロモンの存在
時間経過
作用標識
"# ランダムウォーク
フェロモン・トレイル敷設
フェロモン・トレイル追従
フェロモン・コミュニケーションを行う群行動アルゴリズム
フェロモン・コミュニケーションの実現のために,本研究の群行動アルゴリズムとして車谷 <=
の蟻の採餌行動モデルのうち,主に探索と誘引に関するアルゴリズムを再設計した.以下,本論
文では車谷のモデルと同様に,実験フィールドは有界な平面とし,フィールド内にはエージェン
ト・餌 *・巣 のみが存在するものとする.本研究の群ロボットシステムに適用するた
第 章 群行動アルゴリズムとシミュレーション・モデル
めに車谷モデルを参考に,群行動アルゴリズムは探索・誘引・追跡の つの状態で構成する.前提
条件として,全てのエージェントは 位置を知覚可能であるとする.実際にヒアリの一種 では太陽の方向を知覚し 方向を判断することが知られている <=.
決定性有限オートマトンで記述したアルゴリズムを 9 に示す.アルゴリズム設計のため
,そして つの作用標識 行
に, つの状態 : , つの知覚標識 刺激 : 動 : を設定する.9 に示すように,状態 のエージェントは行動 を選択
する. のエージェントが を知覚すると,エージェントは自己の内部状態を へ遷移させる.
各エージェントの初期位置はランダムに選択され,初期内部状態は であり,ランダム・ウォー
ク を行う.以下に内部状態・知覚標識・作用標識を具体的に説明する.
SS12
E2
Nest arrival
Initial state
Random walk
SS11
E1
P2
P1
Attraction state
Laying down pheromone trail
Contact with prey
Presence of pheromone
P1
Contact with prey
P3
P4
Timeout occurs
SS13
E3
Tracing state
Tracing pheromone trail
9 ? % ! # ) 内部状態 エージェントの内部状態は,以下の 点で構成される.
探索
誘引
追従
初期状態のエージェントは,探索 であり,* に関する情報を持たない.誘引 状態
のエージェントは,* の位置に関する情報を持つ.そして,追従 状態のエージェントは,
* の方向の情報のみを持ち,距離の情報は持たない.
知覚標識 ! 他の状態へ遷移する条件となる知覚標識は以下の 点である.
* との接触
への到着
フェロモンの存在
時間経過
は,* との接触を示す.エージェントは,内部状態が のときに * に接触すると
誘引状態 へ遷移する. は, への到着を示す.エージェントが へ着いたときに
第 章 群行動アルゴリズムとシミュレーション・モデル
作用標識 "# エージェントの行動は,以下の 点である.
ランダムウォーク
K の確率で直進を選択し, K の確率で左超信地旋回を選択,同様に K の確率で左超
信地旋回を選択する.また, K の確率で後進を選択する .
フェロモン・トレイル敷設
方向を検出し,フェロモンを分泌しながら へ移動する.
フェロモン・トレイル追従
フェロモンを検出したとき,エージェントは 方向を検出し, と逆方向に進行方向
を向ける.そして,フェロモンを追従しながら と逆方向,すなわち * 方向へ移動
する.
主体・客体間接触処理
各ロボットがフェロモン・トレイルを生成する機能を有する群れでは,フェロモン・トレイル上
にロボットが誘引される.その結果,多くのロボットがトレイルに集まり,渋滞が発生する.車
谷 <= の研究は,マクロモデル 生成に関する研究であり,実世界でロボット群を運用することを
想定していない.) ら <
= は,この問題を仮想フェロモン・トレイルの幅をロボット本体
の幅と等しくなるよう設定し,トレイルから逸脱し難いシステムにすることによって解決してい
る.しかし,実際のロボットシステムにおいて,太いフェロモン・トレイルを敷設するには大量の
フェロモンを分泌する必要が生じる.そこで本研究では,ロボットは自身の幅の 程度のフェ
ロモン アルコール トレイルを敷設することとし,トレイル上でロボットが渋滞する現象を考慮
し,エージェントが衝突するときの行動をモデル化する.
4 % ? 4 ) 0 ! ! ( %C
! ! #
# #
0 ! # 0 # )0
0 # # #
) ! 0
0 ! #
0 # エージェントが客体との接触を知覚したときの行動を 4 % に示す .エージェントの によって接触後の行動に差異がある.群れの目的は,,* 間にフェロモン・トレイルを敷設
することである.そのため,各 の個体間接触後の行動継続の優先順位は, , , の順
直進,左右超信地旋回,後進の確率は試行錯誤の結果決定された.
対象システムで生じている現象,マクロ挙動を発現させる動的システムとしての構造
状態が同じエージェント同士が接触した場合でもこの規則に従う.
第 章 群行動アルゴリズムとシミュレーション・モデル
とする.この優先順位を決定しないと,フェロモン・トレイル上でエージェントが接触を繰り返
し,群行動アルゴリズムが機能低下する.すなわち,接触後表の規則に従い行動した後に,一定
時間経過後に接触前の行動を再開する.この客体との接触時の行動アルゴリズムにより群れは前
述の群行動アルゴリズムを適切に機能させることができる.以下に各 の個体間接触時の行
動を説明する.
* に関する情報を持たないため,他個体との接触時に回避行動をする.
フェロモン・トレイル敷設中であるため,他個体との接触時には回避行動をせずに他個体が自
身を回避するのを待つ.
フェロモン・トレイル追従中であるため,他個体と接触してもフェロモン・トレイルから大き
く外れないよう後退,一定時間待機後にフェロモン追従行動を開始する.
9 にロボット間の衝突処理の一例を紹介する.内部状態 フェロモン・トレイル敷設
中 のエージェント がフェロモン・トレイルを敷設しているとき,内部状態 フェロモン・ト
レイル追従中 のエージェント 5 が接触したとする * .群れにとって優先度の高い内部状
態であるエージェント はその場で一定時間停止する.エージェント に比べて優先度の低い内
部状態であるエージェント 5 は,接触後に直ちに一定時間後進し,フェロモン追従行動を開始す
る.つまり,エージェント が停止している間にエージェント 5 が接触位置から後進することに
よって離れることになる.エージェント 5 は,後進することで群れにとって最も重要な行動をし
ているエージェント の行動可能な空間を確保している * .フェロモン・トレイルが直線
であった場合でも,エージェント は直線的に移動するのに対して,エージェント 5 はフェロモ
ン・トレイルを追従する場合,左右のフェロモン・センサを用いてジグザグ走行するので後進す
るとトレイルから離れるため再度の衝突は回避され,フェロモン・トレイル上の渋滞も回避され
ることになる * .
Agent B
New
pheromone trail
S3
Old
pheromone trail
Back
S2
S2
Phase 1
S3
Agent A
Recovery
Stop
Phase 2
9 ? (
S2
S3
Recovery
Phase 3
第 章 群行動アルゴリズムとシミュレーション・モデル
シミュレーション・モデル
本節では,エージェント・モデルとフェロモン・モデルの設計を行う. 節で示したように,
エージェントは群れの必要条件として,同一のセンサ構成,アクチュエータ,コミュニケーション・
プロトコルの共有を行う.先ず,エージェント・モデルの設計を行う.エージェント・モデルはロ
ボット群の開発に無理の無い条件とする.
次に,フェロモン・モデルの構築を行う.現実のロボット群を運用するため,フェロモンは蟻の
フェロモンを用いる訳にはいかない.そのため,本研究では,蟻のフェロモンの代用にエタノー
ルを用いる.フェロモン・モデルは,エタノールの蒸発を事前に試験したデータから構築する.
エージェント・モデル
エージェントの外形は円柱型であり,直径は <=,最大速度は <L= とした 4 % .
実際のロボット・システムにおいて,フェロモンの代用にエタノールを用いるのでシミュレーショ
ンではその特性を考慮する.エタノールは,初期状態 のエージェントにとってフェロモンと
して知覚標識となる.そして,エタノールセンサは,フェロモン・トレイルの追従のために用い
られる.
4 % ? 0
$
#
- #0
-
% &
0
<=
<L=
フェロモン・モデル
エージェント群は,有界な平面フィールドで活動するものとする.フィールドは <= <=
の計算格子 グリッド で分けられ,フェロモンの蒸発・拡散現象は中道らの提案する離散方程式 <=
を基に蒸発・拡散現象をモデル化する .フェロモンの蒸発は以下の式によって計算される.
: M N
ここで,
は,ある時刻 のときのグリッド でのフェロモン量であり, は蒸発
係数である.第 項の N
はフェロモン添加量であり,以下の式で定義される.
実ロボットとの比較の結果,フェロモンは水平方向へほとんど拡散しないことが分かったので,本論文では蒸発の
みをモデル化している
第 章 群行動アルゴリズムとシミュレーション・モデル
N
:
2! 0>;
ただし, は実際のフェロモン添加量である.
エージェントのフェロモン・センサの取り付け角は進行方向から に搭載されている.そし
て,フェロモン・センサは,センサ位置 の現在時間のフェロモン量 を検出する.
フェロモン・トレイルの敷設と追従のメカニズム
エージェントは, 誘引 のときにフェロモン・トレイルを敷設する.誘引状態 のエージェ
ントは, 方向を検出し, 方向に向かって移動しながらフェロモン 式 における を分泌する.
追従のメカニズムは実際の蟻の行動を模倣する.蟻は,フェロモン・トレイルを左右の つの触
角で検知する.左 右 の触角がフェロモン・トレイルを検知すると左 右 方へ移動する <=.こ
の行動を模倣するため,フェロモン・センサをエージェントの底面に つ搭載されていると設定
している.9 に示すように,取り付け角は進行方向から に搭載されている.エージェ
ントの進行方向右 左 側のセンサがフェロモンを検知すると左 右 車輪を駆動させる.そして,
エージェントは右 左 へ移動する.この行動アルゴリズムをエージェントに実装した.この行動
は,常に 方向を参照しながら行われ, 方向にフェロモン・トレイルを追従することは
ない.
Driven wheel
Pheromone trail of alcohol
π/6
Robot
9 ? 4 % # 第章
ロボット群の開発
本章では, 章で設計した群行動アルゴリズムを実装するロボットの構成に
ついて述べる.先ず, 節で,知覚標識を実現するためのセンサー構成につい
て述べる.センサは, 節で定義した知覚標識を環境から抽出するために,
フェロモン・センサ, センサ,受光素子・接触センサを設ける.また,同様
に 節で定義した作用標識を実現するために駆動モータと車輪,マイクロ・
ポンプを搭載する.
節では,フェロモン放出機構について説明する.フェロモン エタノール
を環境に放出するために,ロボットには液体用タンクとマイクロポンプを搭載
する.マイクロポンプには,圧力抵抗を設けて求められる排出量を実現する.
最後に, 節で,開発したロボットの全体構成を説明する.システムの構成
には,*( マイコンを用いる.*( マイコンは 2 ( で接続され,センサ群と
情報交換する.
第 章 ロボット群の開発
センサ構成
本節ではロボットに搭載するセンサについて説明する.ロボットには,フェロモン・コミュニ
ケーションを行うためのフェロモン・センサ,帰巣のための センサ,接触対象を判別するた
めの受光素子・接触センサが搭載されている.
フェロモン・センサ
本研究ではフェロモンの代用として,化学的に性質の近い「エタノール ( A 3」を用いる.し
たがって,本研究ではエタノールをフェロモンと呼ぶ.エタノールは高い揮発性を有するため,生
物のフェロモンと同等の特性を発揮すると考えられる.ヒドロキシル基 3A は,酸素原子の電
気陰性度が大きいため強く分極している.この分極によって,水素原子は部分的に陽電荷を持ち,
酸素原子は部分的に負電荷を持つ.したがって,部分的に陽電荷をもつ水素原子が他の酸素原子
に引きつけられ,結合を形成する.これを水素結合という <=.水もまた水素結合をした極性溶
媒である.その水分子の つを低分子量のアルコール分子で置き換えることは容易である.そし
て,アルコール分子は水分子とも水素結合を形成するため,揮発性を抑制することが可能になる.
本研究ではエタノールを検出するセンサとして,日本セラミック社製のアルコールセンサ「67
, 」を用いる.ここで,アルコール検出の原理について説明する.一般にアルコールセンサの材
料には,酸化スズ 3 や酸化鉛 O3 などの 型半導体が用いられる.空気中におかれた半
導体の表面には酸素が吸着する.この吸着酸素は半導体から電子を引き抜き負電荷となって吸着
をしているため,n型半導体の表面には電子空乏層 電子濃度が周囲より小さくなっている層 が
形成され,電気抵抗が高い状態になる.しかし,センサ部にアルコールが接近すると吸着酸素と
アルコールの間で酸化還元反応が起こる.これにより,吸着酸素が減少し,それに伴って電子空
乏層も減少するため,電気抵抗が低下する.したがって,センサ部の電気抵抗値の増減を計測す
ることで,アルコール検出が可能になる.
5
Voltage[V]
4
stimulus duration
3
2
1
0
-1
0
10
20
30
40
50
Time[s]
9 ? .#0 ! 67,
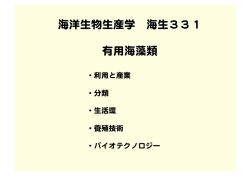
センサ特性を検証するため,実験フィールドにエタノールを塗布し,塗布から 秒後にセンサ
を速度 <L= で通過させる予備実験を行った.9 は,予備実験で得られたセンサの応答
電圧線図である.9 から,このセンサは立ち上がりが良好なのに対し,立下りが悪いこと
がわかる.これはセンサ部の吸着酸素の量が急激に低下し,新たな酸素が流入するのに時間を要
第 章 ロボット群の開発
するのが原因だと考えられる.したがって,応答電圧に対して閾値を設定した場合,応答電圧が
閾値以上になるのは短時間なのに対し,閾値以下になるには時間を要する.その結果,閾値を越
えた状態 飽和状態 が続き,連続的な検出が行えないという問題が生じる.また,応答電圧はエ
タノール水溶液の濃度が高くなるにつれて上昇する.これは,高濃度ではエタノールの分子数が
多いため,吸着酸素とエタノールの間で酸化還元反応が活発に行われるからである.それに対し,
低濃度ではエタノールの分子数が少ないため,応答電圧は高濃度に比べ低い.したがって,濃度
に対する検出可能範囲が閾値設定に大きく依存してしまう.また,応答電圧値はノイズを含んで
いるため,閾値付近で誤検出を招く可能性がある.この特性は,現実の蟻の触角の特性に酷似し
ている 9 .
-1 mV
1 sec
stimulus duration
9 ? .#0 ! 8 本研究では次式を用いることによりこのセンサ特性に対処する.
:
式 の は微小時間 におけるセンサの応答電圧の微分係数を表す. は現在の応答電圧値, は ステップ前の応答電圧値を表す.本研究では微小時間
を予備実験から <= に設定した.微小時間毎に算出される微分係数に閾値を設けることに
より,L 判定が可能になる.また,微分係数の変化に着目しているため,濃度による応答
電圧の差異に依存しない検知が可能になる.これにより,飽和状態やノイズの影響が低減される.
センサ
第章で設計したアルゴリズムを実装する上で,ロボットは 方向を知覚する必要がある.フェ
ロモントレイルの敷設・追従,物体運搬の際,ロボットは 方向を知覚することで進行方向を
決定することができる.また,ロボットは正確に進行方向を決定する必要はない.正確な位置や
方向が要求されるタスクではないので,ロボットは 方向を大まかに知ることができれば十分
である.
本研究では, の代用として東芝製の赤外線電球「2. L + F.」を用いる.赤外線
電球を用いることで,可視光環境下においても実験が可能になる.したがって, から発せられ
る赤外線を検出することで,ロボットは 方向を知覚する.本研究では,赤外線を検出する素
第 章 ロボット群の開発
Front
60°
IR photo transistor
9 ? () ! 子として,A.* 社製のフォトトランジスタ「*4
9」を選定した.*4
9 には可視光カッ
トフィルターが搭載されており,可視光環境下においても赤外線を検出できる.フォトトランジ
スタは,赤外線を受光すると光電効果により抵抗値が変化する.抵抗値の変化に伴い電圧値も変
化するため,L- 変換によりロボットは 方向を知覚することができる.また,フォトトラン
ジスタには受容角 受光可能な角度 が存在する.したがって,全方位を許容するためには設置個
数を決定する必要がある.*4
9 の受容角は Æ であるので,全方位を許容するためには最低 個必要になる.ロボットは大まかな方向を知覚できればよいので,高い分解能は必要ない.した
がって,9 に示すように,同一円周上にロボットの正面から Æ 毎に計 個の素子を搭載
した.また,それぞれの素子は水平面から Æ の向きで固定されている.そして,それぞれの電
圧値を L- 変換し,それらの最大値を参照することでロボットは 方向を知覚することがで
きる.しかし,受容角の関係上,鉛直方向の検出できないため,ロボットは 到着を知覚でき
ない.そこで, 到着検知用に水平面から Æ の方向に素子を つ搭載した.ロボットが に十分接近し, 到着検知用素子の電圧値が全素子の中で最大となったとき,ロボットは への到着を知覚する.
受光素子・接触センサ
本研究では * を押して まで運搬することを想定しているため,ロボットは運搬方向側
の面と反対の面へ回り込む必要がある.したがって,* 周辺で * に接触することなく,*
を知覚する機能が必要である.本研究では,* を青色 /$- により発光させ,ロボットに受光
素子「(0」を搭載することでこの機能を実現した.(0 は光電効果による抵抗値の変化を利用し
た受光素子であり,明暗の区別を得意とする.可視光環境下での使用を考えると,* と可視光
で明暗の区別がつかないため,* を認識することができない.そこで,9 に示すように,
(0 上部に庇を設けることによりこの問題に対処した.また,* を発光させることで,* の
位置情報が大域的な情報になりうる.群れでは局所的な情報によって群れの特性が発揮されるた
め,大域的な情報は群行動を阻害する.この問題に対して,本研究では (0 の応答電圧に閾値を
設定することで,* の位置情報の大域化を抑制し局所的なものにしている.また,* 運搬時,
ロボットが力を作用させる面 以下,力の作用面 には複数のロボットが存在する.しかし,力の
第 章 ロボット群の開発
作用面の面積は有限であるため,力の作用面に接触できるロボット数が制限されてしまう.そこ
で,本研究では * と同色の /$- をロボットにも搭載することでこの問題を解決した.発光す
るロボットを * と誤認識させることで,発光するロボットに対して力を作用させることが可能
になる.これにより,力の作用面に接触できるロボット数の制限がなくなる.
Front
22.5°
Blue LED radius
45°
Cds radius
45°
Center of the robot
Push switch
: Blue LED
Blue LED
Cds
: Cds
9 ? (, ! 9 9 ? 6 # ! /$- 0 (0
ロボットには青色 /$- と (0 がそれぞれ 個ずつロボットの周囲に搭載されている 9 .
しかし,両素子は互いに干渉し合う.そこで,9 , に示すように,ロボット中心からの設置
半径とロボット正面からの角度にオフセットをかけることにより,両素子の干渉問題を解決した.
Front
22.5°
45°
: Push switch
9 ? 6 # ! #) 本研究では,あえて衝突を発生させることでロボットに衝突対象の判別を行わせる.衝突検知
第 章 ロボット群の開発
用の素子として,"" 社製のプッシュ型スイッチ「5 , +」を用いる.ロボットの周囲にこ
のスイッチを計 個等間隔に搭載し, つのダンパを用いて結合する 9 .本研究では,こ
の装置を接触センサと呼ぶ.隣接する両スイッチが反応した場合,接触点は両スイッチの間にな
る.スイッチの搭載個数は 個なのに対して,隣接する両スイッチによる検知も考慮すると 分
解能を持つセンサになる.これにより,全方向の検知が可能になる.
ロボットは (0 と接触センサを組合わせて使用することで衝突対象の判別を行う.本研究では,
* が発光しているのに対し,ロボットと壁は発光しない.したがって,ロボットは接触センサ
により衝突の検知を行い,衝突対象が発光していれば *,発光していなければ他のロボットま
たは壁と判定する.
第 章 ロボット群の開発
フェロモン放出機構
本節では,フェロモントレイル敷設 を実現するための機構について説明する.本研究では,
榎本マイクロポンプ製作所製のマイクロポンプ「(1 , F」流量: <L= と容積 <=
のポリプロピレンタンクを組合わせることでこの機構を実現した.デバイス間はシリコンチュー
ブで接続されている.マイクロポンプは *F1 で制御され,-) 比を変更することで流量調整が
可能である.使用するマイクロポンプはダイヤフラムの往復によって,吸引・吐出を行う.しか
し,-) 比を低く設定し過ぎるとトルクが不足し,ポンプとして機能しなくなってしまう.また,
-) 比を低く設定するとダイヤフラムの往復速度が低下し,フェロモントレイルが不連続になる
問題が発生する.したがって,*F1 制御だけでは流量調整に限界が生じる.エタノールの放出
量は,その揮発時間に影響を及ぼすので,群れの振る舞いにも影響が出る.
Ethanol flow
Second pressure drag
First pressure drag
Ethanol tank
Third pressure drag
Micro pump
PWM control
9 ? * )
そこで,本研究では 9 に示すように,エタノールの進路に圧力抵抗 #) 0 を設
置することでこの問題に対処した.圧力抵抗を設置することで,エタノールの流速が低下し,そ
の結果,流量が低下する.本研究では,デバイス間を接続するシリコンチューブを部分的に潰す
ことで圧力抵抗を実現している.これにより,流量を <L= まで減少させることができる.
第 章 ロボット群の開発
全体構成
本節では,ロボットの全体の構成について説明する. 節で説明したように,ロボットにはフェ
ロモン・センサ, センサ,受光素子・接触センサが搭載されている.また, 節で説明した
ように,フェロモン放出機構が搭載されている.本節では,それらのセンサ・ポンプ・回路など
の配置について述べる.
ハードウェア構成
Nest sensor (IR phototransistor)
Micro pump
for laying down pheromone
Ethanol tank
Internal state transmitter
Touch sensor
& LED – Cds unit
DC Motor & magnetic encoder
Alcohol sensor
9 ? () !
0# % .63 9 は開発したロボット .63 である.開発したロボットの仕様は以下の通りである;
ボディ直径? <=,高さ? <=,重量? <"=,移動速度? <L=.電源には ,1A バッテ
リー + を使用する.予備実験の結果, 分間の連続運転が可能であった.バッテ
リーはロボットの中心に縦置きで搭載されている.ロボットは大きく分けて つの層から構成さ
れ,各層はスペーサで支持される.以下で各層について説明する.
第 層には,キャノンプレシジョン社製の -( モーター「-」磁気式エンコーダを搭載
で構成される駆動部,アルコールセンサ,フェロモン吐出口が搭載されている.モーターは左右
独立に *F1 制御し,それぞれの回転数はエンコーダーで監視されている.エンコーダーによっ
て回転数を監視することで,ロボットは物体運搬の可否を知覚する ことが可能になる.9
にロボットの底面 第 層の裏側 の概略図を示す.正面からそれぞれ Æ の位置にアルコール
第 章 ロボット群の開発
センサを配置した.これにより,フェロモントレイルの蛇行追従が可能になる.フェロモン吐出
口は,アルコールセンサの誤検出を防ぐためにロボット後方に配置した.
第 層には,ロボットのシステム基板, 節で説明したセンサ基板,電源兼無線送信用基板の
計 枚の基板が搭載されている.各基板をオスピンとメスソケットで接続し,配線数を削減した.
また,ロボットの を実験者が視覚的に理解するために, セグメント /$- を搭載した.
第 層には,フェロモン放出機構のタンクとマイクロポンプが搭載されている.フェロモンの
吐出口は第 層に搭載されているので,第 層から第 層までシリコンチューブによる配線を施
した.
第 層には, センサが搭載されている.第 層には センサの他には何も搭載していな
い.重量の重いデバイスを下層部に配置し,かつ上層部への搭載物を減らすことで,転倒の可能
性を低減させている.
Front
30°
30°
Alcohol sensor
Caster
Pheromone release point
9 ? 5 " 0 ! & システム構成
9 に開発したシステムの構成を示す.本システムは ,,<+= の 系統の電源で駆
動する.本研究では (# 0) 社製のマイクロコントローラー「*( (P
(」
以下,マイコン を用いてシステムの制御を行う.ロボットにはマイコンが計 つ搭載されてい
第 章 ロボット群の開発
WirelessUSB
(2.4GHz)
3.3[V] circuit
Linear regulator
TA48033S
7segment LED
C-551SR
PSoC (Transmitter)
CY8C29466
H/L
SPI
WirelessUSB module
CY3630M
I2C
PSoC (Slave2)
CY8C29466
Serial com. module
ADM3202AN
RS232C
5.0[V] circuit
Serial com. module
ADM3202AN
PSoC (Master)
CY8C29466
PSoC (Slave1)
CY8C29466
I2C
Voltage
Voltage
DC to DC convertor
CC3-0505SF-E
H/L
Alcohol sensor
NGSX-03
H/L
Magnetic encoder
on DN22S
Pulse
Nest sensor
PT381F
Touch sensor
AB-15AV
Voltage
H/L
Light receiver
Cds
Light transmitter
LED
Motor driver
TA8440HQ
7.2[V] circuit
H/L
Ni-MH Battery
7.2V 3900mAh
Micro pump
CM-6W
Motor
DN22S
9 ? !
0# %
る.まず,2 ( バス・ラインで接続される つのマイコンについて説明する.*# 社が提唱し
た 2 ( 通信方式は以下に示す特徴を有する.
シリアルデータライン - とシリアルクロックライン (/ の 本のバス・ラインのみ
で構成される
バス・ラインに接続されているデバイスは、マスター とスレーブ に分類さ
れ,それぞれが固有のアドレスを持つ
通信の主導権はマスターが握る
本研究では つのマスター, つのスレーブでシステムは構成される.本論文では,9 に
示すように,2 C通信においてマスターを担うマイコンをマスター,スレーブをそれぞれスレー
ブ ,スレーブ と呼ぶ.また,残りのマイコンはロボットの を無線送信する機能に特化し,
スレーブ に単方向シリアル通信 .( 方式 で接続されている.本論文では,このマイコン
をトランスミッターと呼ぶ.
次に,各マイコンで行われる処理について説明する.スレーブ には センサと接触センサ
が接続されている.したがって,スレーブ は センサの応答電圧の - 変換し, 方向を
検出する処理と接触センサをポーリングによって監視する つの処理を行う.処理によって得ら
第 章 ロボット群の開発
れたデータは 2 Cバス・ラインを介して,マスターに送信される.また,スレーブ はマスター
から送信される データをトランスミッターに一方的に送信する処理も前述の処理と並行し
て行う.
スレーブ には受光素子「(0」と青色 /$- が接続されている.(0 の応答電圧を - 変換し,
* の検出処理を行う.得られたデータはスレーブ と同様にマスターに送信される.また,マ
スターから送信される /$- の発光・消灯命令により,/$- を LQ 処理する.
マスターにはアルコールセンサ,エンコーダー,モータードライバを介して -( モーター,マ
イクロポンプが接続されている.また,2 C通信によって全スレーブからデータを受信する.つ
まり,マスターには全知覚データが集積される.マスター自身は,アルコールセンサの応答電圧
を - 変換し,フェロモンの検出する処理とマイコンの割り込み処理機能によりエンコーダを監
視し,物体運搬の可否を判定する.そして,集積した全知覚データを参照し,ロボットの動作を
決定する.動作が決定されるとモータードライバにパルス信号を送信し,モーター,マイクロポ
ンプを駆動・停止させる.
トランスミッターには無線送信用のデバイスと内部状態表示用の セグメント /$- が接続され
ている.したがって,トランスミッターはスレーブ から 情報を受信し, セグメント /$に表示,内部状態取得用パソコンへ無線送信する.
第 章 ロボット群の開発
第章
フェロモン・コミュニケーションの実現
本章では, 章:群行動アルゴリズムとシミュレーション・モデルで設計した
群行動アルゴリズムと, 章:ロボット群の開発で開発したロボット群を用いて
フェロモン・コミュニケーションの実現を計算機シミュレーション実験と実機
実験から検討する.
節では, 章で設計した群行動アルゴリズムの妥当性について計算機シミュ
レーションを用いて検討する.具体的には,実験環境に合わせた環境を計算機
シミュレータ内に用意し,フェロモン・コミュニケーションを行うのに必要な
個体数を見積もる.
節では, 章で開発したロボット群を用いて開発機が実世界でフェロモン・
コミュニケーションを行うことが可能なのかを検証する.計算機シミュレーショ
ン実験の結果に基づいて,フェロモン・コミュニケーションを十分に行うこと
のできる機体数を用いてロボット群実験を行い,実世界でロボット群がフェロ
モン・コミュニケーションを行うことができることを示す.
第 章 フェロモン・コミュニケーションの実現
計算機シミュレーション実験
本節では, 章で設計した群行動アルゴリズムと 章で開発したロボット群のモデル用いて計算
機シミュレーション実験によって提案した群行動アルゴリズムが有効に働くことを示す.
計算機シミュレーション設定
シミュレーションにおいて,エージェント数は ,<体= とし,フィールドサイズは <=
とする.実験フィールド上の と * は対角に設置する.また,シミュレーション時間は 分間とした.フェロモンの蒸発・拡散は式 に基づく.各パラメーターは,実機実験で用いる
エタノールを想定して以下のように設定した.蒸発係数 は付録 によって導出される.本
シミュレーションのフェロモン濃度は K と設定した.また,計算における刻み時間は <= と
設定した.4 % に本節で行う計算機シミュレーションにおける主要なパラメータをまとめる.
4 % ? ) ! # ) # )% ! &0 @
<=
# K
エージェントが 初期状態 のときに * を発見,フェロモン・トレイルの敷設を行う行動
を I敷設 0Jと定義し,フェロモン・トレイルを発見し,誘引された後に * を発見
しフェロモン・トレイルの再敷設を行う行動を I強化 !Jと定義する.強化が行われる
ことは,エージェントが環境から情報を取得し,その情報に対応したことを示し,フェロモン・コ
ミュニケーションが成立したことを示す.本研究では,敷設・強化回数をフェロモン・コミュニ
ケーションのパフォーマンスの評価値としてカウントする.
計算機シミュレーション結果
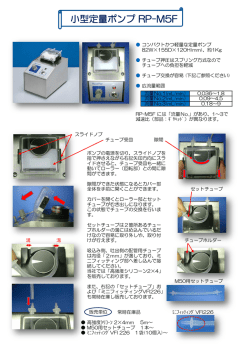
エージェントの初期位置をランダムに変更して 分間 # のシミュレーションを 回行った.9 にエージェント数? 体のときのシミュレーション例を示す.活動環境上の青
いメッシュはフェロモン場を示す. : <= 9 , は,計算機シミュレーションの初
期状態であり,エージェントは実験フィールドにランダムに配置される. : <= 9 ,
では,エージェントが実験フィールド内で * を探索している. : <= 9 , で,エージェント群はフェロモン・トレイルを敷設・強化を行っている. : <= 9
, では,エージェント群がフェロモン・トレイルを強化し, : <= に比べてフェロ
モン・トレイルが強化されていることがわかる.最終的に, : <= 9 , では
フェロモン・トレイルが大きく強化され,エージェント群が相互にフェロモン・コミュニケーショ
ンしていることがわかる.
ロボット数 体のときの 回の計算機シミュレーション実験の結果を 4 % に示す.結果
のばらつきはあるものの,平均して 回のフェロモン・トレイルの敷設を行い, 回の強化
第 章 フェロモン・コミュニケーションの実現
0 min
Prey
Nest
5 min
Agent
10 min Pheromone trail
15 min
20 min
9 ? ) ) : ; &0: <=
第 章 フェロモン・コミュニケーションの実現
フェロモン・コミュニケーション を行った.この結果から,群行動アルゴリズム 9 ,衝
突処理アルゴリズム 4 % は有効に働いたといえる.実機を用いた実験でも同様にフェロモ
ン・コミュニケーションが行われるものと考えられる.
4 % ? ) ) : ; &0: <=
/ 0 .!
+ + L *#) 第 章 フェロモン・コミュニケーションの実現
ロボット群実験
計算機シミュレーション実験の結果から,実ロボット群においてもフェロモン・コミュニケー
ションが実現することが示唆された.本節では,計算機シミュレーションと同様のロボット数,実
験フィールドを用意し実ロボット群におけるフェロモン・コミュニケーションの実証実験を行う.
ロボット群実験設定
計算機シミュレーションと同様に実験フィールドのサイズを <=, と * は実
験フィールドの対角に設置した.また,投入ロボット数は 体とし,ロボットの初期位置を変え
て 回の実験を行った.
まず,実験環境に適切なフェロモン濃度を調べるために,フェロモン・トレイルの追従行動の予
備実験を行った.低濃度エタノールを用いると,フェロモンの持続時間は上がるが,アルコール
センサが十分にフェロモンを検出できず,追従エラーが発生した.高濃度エタノールを用いると,
アルコールセンサがフェロモンを検出するものの,フェロモンの持続時間が短く,情報が環境に
継続して残らなかった .試行錯誤の結果,エタノール濃度を K に設定し,フェロモン・トレイ
ルの持続時間を計算機シミュレーションと同様に 分程度保つことに成功した.4 % に本節
で行うロボット群実験における主要なパラメータをまとめる.
4 % ? $># ! # ) # )% ! &0 @
<=
# K
ロボット群実験結果
ロボットの初期位置をランダムに定め, 分間実験し,環境の状態とロボットの振る舞いを観
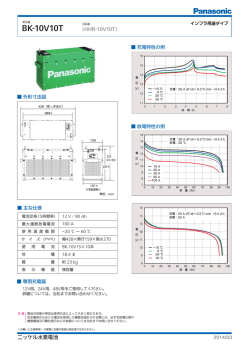
測した.9 に,計算機シミュレーションと同様にロボット数を 体としたときの通常のカ
メラで撮影した画像とサーモグラフィで計測 エタノールが存在する点では気化熱の影響で周辺よ
り温度が低くなることを利用 した : <= のときの実験環境の温度分布を示す .
: <= 9 ,;8 では,実験者がロボットを実験フィールドに設置した初期状態であり,
環境中にフェロモン場は生成されていない. : <= 9 ,5;58 では,群れはトレイルの
敷設・強化を行いフェロモン・コミュニケーションをはじめている. : <= 9 ,(;(8,
: <= 9 ,-;-8 では,群れはトレイルの強化を進め,フェロモン・コミュニケーショ
ンを促進している.最終的に, : <= 9 ,$;$8 では,ロボット群は 体のときよりも
のエタノールではフェロモン・トレイルの追従可能な時間は 未満
本実験では, には赤外線電球を用いており,実験中はフィールド表面温度が上昇する.特に, 直下付近
は放射熱によって温度が上昇し,サーモグラフィでは白く表示されるが,ロボットは センサ頂上の赤外線受光素
子によって を検出している.サーモグラフィによって白く表示されている部分が になっているわけではな
いことに注意しておく.
第 章 フェロモン・コミュニケーションの実現
多くフェロモン・トレイルを敷設・強化することによってフェロモン・コミュニケーションを行っ
ていることがわかる.
ロボット数 体のときの 回の実験結果を 4 % に示す.計算機シミュレーション実験の
結果と同様に結果のばらつきはあるものの,平均して 回のフェロモン・トレイルの敷設を行
い, 回の強化 フェロモン・コミュニケーション を行った.
4 % ? $># ) : ; &0: <=
/ 0 .!
+ + L *#) 第 章 フェロモン・コミュニケーションの実現
A
Robot
Nest
A’
Nest
Prey
Prey
0min
0min
B’
B
Pheromone Trail
5min
5min
C’
C
10min
10min
D’
D
15min
15min
E’
E
20min
9 ? $># ) : ; &0: 20min
<=
第 章 フェロモン・コミュニケーションの実現
結論
計算機シミュレーション実験結果 4 % ,ロボット群実験結果 4 % から,実ロボッ
ト群におけるフェロモン・コミュニケーションの実現に成功したと言える.
本研究では,我々はフェロモン・トレイルを用いて情報の共有を行うロボットのコミュニケー
ション方法に注目し,それを実ロボットで実現することを考えた.フェロモン・トレイルを用い
たコミュニケーションは,化学・可塑・間接・局所的な特徴を有する.その特徴を活かした蟻の振
る舞いに基づいて,フェロモンを用いる行動アルゴリズムを提案した.
計算機シミュレーションにより,群行動アルゴリズムと主体・客体間接触処理の妥当性を検証
し,実機実験を行った.計算機シミュレーション実験の結果,提案したアルゴリズムでフェロモ
ン・トレイルを敷設し複数回に渡って強化することが観測された.計算機シミュレーション結果を
基に,実機を開発し実機実験を行った.実機実験の結果,ロボット群においてもフェロモン・トレ
イルを敷設し複数回に渡って強化 コミュニケーション することが観測された.この結果は,ロ
ボット群においてフェロモン・コミュニケーションが実現したことに他ならない.また,本研究の
成果は,(3 ( 3#@ などで研究されている「多エージェントが環境に揮発
性のある情報を残す」という最適化手法の実ロボット群による実世界での実現可能性を示す.
第章
ロボット群におけるフェロモン・コミュニ
ケーションの性質の解明
本章では, 節:研究目的で述べたフェロモン・コミュニケーションの種々
の性質の解明にアプローチする.具体的には, 群れのパフォーマンスに対す
るエージェント数の拡張性に関する問題, 群れのパフォーマンスに対する活
動環境サイズの拡張性に関する問題, 群れのパフォーマンスに対するフェロ
モンの濃度依存性に関する問題, 群れの規模に対するロバストネスに対して
計算機シミュレーション,ロボット群実験からアプローチする.
節では, 群れのパフォーマンスに対するエージェント数の拡張性に関
する問題に対して計算機シミュレーション実験とロボット群実験を通じてアプ
ローチする.計算機シミュレーション実験では,固定された実験環境に個体数
をパラメータにして投入し,個体数に応じて群れの挙動がどのように変化する
かを検討する.ロボット群実験でも計算機シミュレーション実験と同様に,個
体数をパラメータにして投入し,群れの挙動を検討する.
節では, 群れのパフォーマンスに対する活動環境サイズの拡張性に関
する問題に対して計算機シミュレーション実験とロボット群実験を通じてアプ
ローチする.計算機シミュレーション実験では,群れの個体数を固定し,活動
環境サイズをパラメータにして実験を行う.活動環境のサイズが変化すること
で,群れがどのように変化するのかを観測する.ロボット群実験でも,計算機
シミュレーション実験と同様に,活動環境サイズをパラメータにして実験を行
い,群れの挙動を見る.
節では, 群れのパフォーマンスに対するフェロモンの濃度依存性に関
する問題に対して計算機シミュレーション実験とロボット群実験を通じてアプ
ローチする.計算機シミュレーション実験では,付録 ,$R で導出し
た,フェロモンの蒸発モデルを用いてフェロモン濃度をパラメータとして実験
を行う.ロボット群実験では,実際にフェロモン濃度を変化させて実験を行う.
節では, 群れの規模に対するロバストネスに対して計算機シミュレー
ションを用いてアプローチする.活動環境に対する個体密度を固定し,活動環
境サイズに応じて個体数を増加させ,群れの規模を大きくしたときの規模に対
するロバストネスを検討する.
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
群れのパフォーマンスに対するエージェント数の拡張性に関する性質
本節では,群れのパフォーマンスに対するエージェント数の拡張性について議論する.活動環
境サイズに対して,過少な数のエージェントを投入するとフェロモン・コミュニケーションが実
現できないことが考えられる.そのため,
「どの程度のエージェントが存在すればフェロモン・コ
ミュニケーションが実現するのか」という問いについて議論する.
計算機シミュレーション実験
本節では,計算機シミュレーションによってフェロモン・コミュニケーションの個体数に対する
特性を検討する.計算機シミュレーションを用いて活動環境サイズを固定し,個体数を増加させ
る.個体数を増加させることによって活動環境内の個体密度を増加させたときの群れの振る舞い
を観測する.
計算機シミュレーション設定
シミュレーションにおいて,エージェント数は ,<体= とし,フィールドサイズは <=
とする.実験フィールド上の と * は対角に設置する.また,シミュレーション時間は 分間とした.フェロモンの蒸発・拡散は式 に基づく.各パラメーターは,実機実験で用いる
エタノールを想定して以下のように設定した.蒸発係数 は付録 によって導出される.本
シミュレーションのフェロモン濃度は K と設定した.また,計算における刻み時間は <= と
設定した.4 % に本節で行う計算機シミュレーションにおける主要なパラメータをまとめる.
4 % ? ) ! % ! )% ! # )% ! ,
&0 @
<=
# K
エージェントが 初期状態 のときに * を発見,フェロモン・トレイルの敷設を行う行動
を I敷設 0Jと定義し,フェロモン・トレイルを発見し,誘引された後に * を発見
しフェロモン・トレイルの再敷設を行う行動を I強化 !Jと定義する.強化が行われる
ことは,エージェントが環境から情報を取得し,その情報に対応したことを示し,フェロモン・コ
ミュニケーションが成立したことを示す.本研究では,敷設・強化回数をフェロモン・コミュニ
ケーションのパフォーマンスの評価値としてカウントする.
計算機シミュレーション結果
エージェントの初期位置をランダムに変更して 分間 # のシミュレーションを 回行った.エージェント数? , 体のときの実験を行った.
9 に計算機シミュレーション実験の結果を示す.縦軸は敷設・強化回数の平均を示し,横
軸はエージェント数を表している.黒の実線は敷設回数の平均,灰色の実線は強化回数の平均の計
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
算機シミュレーション結果を示す.9 に示すように,エージェント数の増加に伴い,強化回
数 フェロモン・コミュニケーション回数 は敷設回数と比較して大きく増加することが分かった.
そして,投入とコミュニケーション回数 強化回数 はエージェント数に比例せず,エージェント
を多数投入したとしてもコミュニケーション回数は単純増加しないことがわかる.また,これら
の計算機シミュレーションの結果,エージェント数が , 程度でも十分にフェロモン・コミュニ
ケーションを実現できることを確認できた.
Number of times
50
40
Laying down (sim.)
30
Reinforcing (sim.)
20
10
0
0
5
10
15
20
Number of robots
25
30
35
40
9 ? . # % #! ! # ) 0 )%
! 9 にエージェント数? 体のときのシミュレーション例を示す.活動環境上の青いメッシュ
はフェロモン場を示す. : <= 9 , は,計算機シミュレーションの初期状態であ
り,エージェントは実験フィールドにランダムに配置される. : <= 9 , では,
エージェントが実験フィールド内で * を探索している. : <= 9 , では,
エージェントはフェロモン・トレイルを敷設している. : <= 9 , では,エー
ジェント群がフェロモン・トレイルを強化し, : <= に比べてフェロモン・トレイルが強化
されていることがわかる.最終的に, : <= 9 , ではフェロモン・トレイルが
さらに強化されている.
9 にエージェント数? 体のときのシミュレーション例を示す.活動環境上の青いメッシュ
はフェロモン場を示す. : <= 9 , は,計算機シミュレーションの初期状態で
あり,エージェントは実験フィールドにランダムに配置される. : <= 9 , で
は,エージェントが実験フィールド内でフェロモン・トレイルを敷設している. : <= 9
, では,エージェントはフェロモン・トレイルを敷設・強化することでフェロモン場が
大きくなっていることがわかる. : <= 9 , では,エージェント群がフェロモ
ン・トレイルを強化し, : <= に比べてフェロモン場が強化されていることがわかる.最終
的に, : <= 9 , ではフェロモン・トレイルがさらに強化され,エージェント
群がフェロモン・コミュニケーションを行っている.
9 にエージェント数? 体のときのシミュレーション例を示す.活動環境上の青いメッシュ
はフェロモン場を示す. : <= 9 , は,計算機シミュレーションの初期状態であ
り,エージェントは実験フィールドにランダムに配置される. : <= 9 , では,
エージェントが実験フィールド内で * を探索している. : <= 9 , では,
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
エージェントはフェロモン・トレイルを敷設している. : <= 9 , では,エー
ジェント群がフェロモン・トレイルを強化し, : <= に比べてフェロモン・トレイルが強化
されていることがわかる.最終的に, : <= 9 , ではフェロモン・トレイルが
さらに強化され,エージェント群がフェロモン・コミュニケーションを行っている.
9 にエージェント数? 体のときのシミュレーション例を示す.活動環境上の青いメッ
シュはフェロモン場を示す. : <= 9 , は,計算機シミュレーションの初期状態
であり,エージェントは実験フィールドにランダムに配置される. : <= 9 , で
は,エージェントが実験フィールド内で * を探索している. : <= 9 , で
は,エージェントはフェロモン・トレイルを敷設している. : <= 9 , では,
エージェント群がフェロモン・トレイルを強化し, : <= に比べてフェロモン・トレイルが
強化されていることがわかる.最終的に, : <= 9 , ではフェロモン・トレイ
ルがさらに強化され,エージェント群がフェロモン・コミュニケーションを行っている.
9 にエージェント数? 体のときのシミュレーション例を示す.活動環境上の青いメッ
シュはフェロモン場を示す. : <= 9 , は,計算機シミュレーションの初期状態
であり,エージェントは実験フィールドにランダムに配置される. : <= 9 , で
は,すでにエージェントがフェロモン・トレイルを敷設・強化することによってフェロモン・コ
ミュニケーションを行っている. : <= 9 , ; ; ではフェロモン・ト
レイルがさらに強化され,エージェント群がフェロモン・コミュニケーションを行っている.
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
0 min
Prey
0 min
Nest
5 min
Prey
Nest
Agent
5 min
Agent
Pheromone trail
10 min
10 min
Pheromone trail
15 min
15 min
20 min
20 min
9
? ) ) : ;
&0: <=
9
? ) ) :;
&0: <=
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
0 min
Prey
0 min
Nest
5 min
Prey
Nest
Agent
5 min
10 min
Agent
10 min
Pheromone trail
Pheromone trail
15 min
15 min
20 min
20 min
9
? ) ) :;
&0: <=
9
? ) ) : ;
&0: <=
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
0 min
Prey
Nest
5 min
Pheromone trail
Agent
10 min
15 min
20 min
9 ? ) ) :; &0: <=
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
ロボット群実験
ロボット群実験設定
計算機シミュレーションと同様に実験フィールドのサイズを <=, と * は実
験フィールドの対角に設置した.計算機シミュレーション結果から,少数のロボットで構成され
た群れでもフェロモン・コミュニケーションが実現できることが示唆された.そのため,投入ロ
ボット数は ,,,,, 体とし,それぞれ 回 合計 回 の実験を行った.また,ロボッ
トに搭載するフェロモンの濃度は K とした.4 % に本節で行うロボット群実験における主
要なパラメータをまとめる.
4 % ? $># ! % ! )% ! # )% ! ; ; ; ; ; &0 @
<=
# K
ロボット群実験結果
実機の増加に伴う敷設回数・強化回数を 9 に示す.黒・灰色の実線は,それぞれロボット
群実験における敷設回数の平均,強化回数の平均を示す.計算機シミュレーション実験と同様に
ロボット数の増加に伴ってコミュニケーション回数が増加する振る舞いが観測された.この結果
は,計算機シミュレーション結果と同様の傾向があり,計算機シミュレーションの妥当性も検証
された.計算機シミュレーションとロボット群実験の結果の差異については,後述する.
Number of times
30
Laying down (exp.)
Reinforcing (exp.)
25
20
15
10
5
0
0
2
4
6
Number of robots
8
10
9 ? . # % #! ! # ) 0 )%
! %
9 に,ロボット数を 体としたときの通常のカメラで撮影した画像とサーモグラフィ
で計測 エタノールが存在する点では気化熱の影響で周辺より温度が低くなることを利用 した
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
: <= のときの実験環境の温度分布を示す . : <= 9 ,;8 では,実
験者がロボットを実験フィールドに設置した初期状態であり,環境中にフェロモン場は生成されて
いない. : <= 9 ,5;58 においても,環境に変化はなくロボット群は * を探索して
いる. : <= 9 ,(;(8 では,群れはトレイルの敷設を行う.複数体がフェロモン場を
強化することによって : <= 9 ,-;-8 のようにフェロモン場のフェロモンが濃くなっ
ていることがわかる.最終的に, : <= 9 ,$;$8 では,ロボット群はフェロモン・ト
レイルを敷設・強化することによってフェロモン・コミュニケーションを行っていることがわかる.
9 に,ロボット数を 体としたときの通常のカメラで撮影した画像とサーモグラフィで
計測した : <= のときの実験環境の温度分布を示す : <= 9 ,;8
では,9 ,;8 と同様に実験者がロボットを実験フィールドに設置した初期状態であり,環
境中にフェロモン場は生成されていない. : <= 9 ,5;58 では,群れはトレイルの敷
設・強化を行いフェロモン・コミュニケーションをはじめている. : <= 9 ,(;(8,
: <= 9 ,-;-8 では,群れはトレイルの強化を進め,フェロモン・コミュニケーショ
ンを促進している.最終的に, : <= 9 ,$;$8 では,ロボット群は 体のときよりも
多くフェロモン・トレイルを敷設・強化することによってフェロモン・コミュニケーションを行っ
ていることがわかる.
本実験では, には赤外線電球を用いており,実験中はフィールド表面温度が上昇する.特に, 直下付近
は放射熱によって温度が上昇し,サーモグラフィでは白く表示されるが,ロボットは センサ頂上の赤外線受光素
子によって を検出している.サーモグラフィによって白く表示されている部分が になっているわけではな
いことに注意しておく.
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
9 ? $># ) :; &0: <=
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
9 ? $># ) : ; &0: <=
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
議論
計算機シミュレーションとロボット群実験の比較
エージェント数? , 体における計算機シミュレーション結果とロボット群実験結果を 9 に示す.縦軸は敷設・強化回数の平均を示し,横軸はエージェント・ロボット数を表している.黒・
灰色の実線は,それぞれ計算機シミュレーションの敷設・強化回数を示す.また,黒・灰色の破線
は,それぞれロボット群実験の敷設・強化回数を示す.
Number of times
30
25
Laying down (sim.)
Reinforcing (sim.)
Laying down (exp.)
Reinforcing (exp.)
20
15
10
5
0
0
2
4
6
Number of robots
8
10
9 ? (# ! ) 0 ># ) . 0) ! #? <=
計算機シミュレーション結果と比較してロボット群実験のフェロモン・トレイルの敷設回数が多
い原因として,計算機シミュレーションとロボット群実験の差が考えられる.計算機シミュレー
ションでは I* 接触後に 方向を検出し, 方向へ回頭後に 方向へ移動するJという
行動を行わせている.しかし,この行動を実ロボットで行わせると * に接触した状態で回頭し,
ロボットを破損することが多々発生した.そのため,実ロボットでは一定距離 程度 後進し
てから 方向の検出,フェロモン・トレイル敷設・強化を行わせることした.この設定では,
フェロモン・トレイルと * の間に隙間が生じ,ロボットがフェロモン・トレイルを追従してき
たのにも関わらず * 直前 約 でフェロモン・トレイルを見失うという問題が生じた.こ
の隙間を埋めるために * を発光させ,ロボットが直前で * を見失うことを防いでいる.つ
まり,ロボット群実験において,* は計算機シミュレーションよりもロボットが発光を検出す
る範囲 程度 だけ半径が大きくなっていると解釈することができる.そのため,計算機シ
ミュレーション実験に比べてロボット群実験のフェロモン・トレイル敷設回数が増加していると
考えられ,敷設回数の増加が強化回数の増加をもたらしていると考えられる.
上述の議論を考慮し,* 半径を <= 増加させたときの計算機シミュレーション結果とロ
ボット群実験結果の比較を 9 に示す.縦軸は敷設・強化回数の平均を示し,横軸はエージェ
ント・ロボット数を表している.黒・灰色の実線は,それぞれ計算機シミュレーションの敷設・強
化回数を示す.また,黒・灰色の破線は,それぞれロボット群実験の敷設・強化回数を示す.
9 が示すように,計算機シミュレーション結果とロボット群実験結果は,敷設回数はほぼ
同様の結果であった.ロボット群実験に合わせ,* 半径を <= 大きくしたため,エージェン
ト群が * を発見する機会が増加し,フェロモン・トレイルの敷設回数が 9 に比べて増
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
Number of times
30
25
Laying down (sim.)
Reinforcing (sim.)
Laying down (exp.)
Reinforcing (exp.)
20
15
10
5
0
0
9 2
4
6
Number of robots
8
10
? (# ! ) 0 ># ) . 0) ! #? <=
加している.その結果,前述の議論にあるようにフェロモン・トレイルの強化回数が増加したも
のと考えられる.
Number of times
70
Laying down (sim.)
60
Reinforcing (sim.)
50
Laying down (sim.) fixed
40
30
Reinforcing (sim.) fixed
20
10
0
0
5
10
15
20
Number of robots
25
30
35
40
9 ? . # % #! ! # ) 0 )%
! 9 を基に,9 と同様に計算機シミュレーションを行った.9 に示すように,
* 半径を大きくすることにより * の発見可能性が向上し,敷設回数が増加している.また,
敷設回数の増加に伴いフェロモン・トレイルの強化回数も増加している.
採餌効率に関する考察
本節では,採餌効率について議論する.採餌効率とは以下の $R で定義する.採餌効率が
高いことは個体が効率的に採餌していることを示し,採餌効率が低いことは非効率な採餌を行っ
ていることを示す.
9 Æ : / 0 M .!
)% ! 00) 9 に個体の採餌効率を示す.横軸は個体数を示し,左縦軸は採餌回数 敷設回数M強化回
数,右縦軸は採餌効率を示す.
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
8
7
6
5
4
3
2
1
0
Number of times
70
60
50
Laying down (sim.) fixed
Reinforcing (sim.) fixed
Foraging efficiency
40
30
20
10
0
0
5
10
15
20
Number of robots
25
30
35
40
9 ? . # % ! Æ 0 )% ! 9 が示すように,採餌効率は個体数の増加と共に減少している.本節では,計算機シミュ
レーション内で無限の餌 * を想定しているにも関わらず群れの採餌効率は規模の増加に伴っ
て減少している.これは,群れの規模が大きいほど個体は飢えることを意味する.生物である蟻に
は代謝があるが本論文ではロボットに代謝という概念を想定していない.ロボットのエネルギー
を考慮すれば自ずと最適な個体数が決定できると考えられる.
化学センサ特性と採餌回数に関する考察
実世界でフェロモン・コミュニケーションを行うロボット群を開発するにあたって,エタノール
溶液の濃度によるトレード・オフ問題が存在する.高濃度エタノール溶液は,シグナル強度 セン
サの電圧値 は高いが,持続時間が短い.低濃度エタノール溶液は,シグナル強度は低いが,持続
時間が長い.このトレードオフ問題は,実際の化学物質を用いなければ現れなかった問題であり,
現実の蟻においても同様にフェロモン・コミュニケーションする上でフェロモンの混合比を調整
していることを示唆する研究も複数報告されている <S =.また,) らは,フェロモン・
トレイルの物理的な条件を変化させることで群れのパフォーマンスが変化することを指摘してい
る.我々の研究でも,フェロモン混合比を変化させることによってコミュニケーション回数が変
化することがわかっている <=.活動フィールドのサイズ,エージェント数が決定されれば最大
のパフォーマンスを発揮するフェロモン濃度が存在する可能性がある.環境変化に対してフェロ
モン濃度を適応的に変化させ,コミュニケーションのロバスト性を確保する行動も可能であると
考えられる.
また,本シミュレーション・ロボット群実験における,フェロモン・トレイルの敷設・強化回数
の和は,* に接触した回数であり,それはすなわち採餌回数である.この個体数と採餌回数の
関係は,非線形性を有しており,) らもその特性を報告している <
=.) らの実験
システムでは,仮想フェロモン場を用いておりフェロモン・トレイルの蒸発速度に関する操作を
行うことができる.パラメーターに蒸発係数を与えて実験を行っており,蒸発係数を操作すると
採餌回数が変化することを報告している.
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
結論
本節では,活動環境を固定し,エージェント数を操作するというアプローチでエージェント密度
が群れに与える影響を調査した.計算機シミュレーションの結果,敷設回数 0 はエー
ジェント数の増加にほとんど影響を受けず,強化回数 ! はコロニー・サイズによって
増加することがわかった.強化回数は,フェロモン・コミュニケーションを行った回数であり個体
数の増加はフェロモン・コミュニケーションに大きく影響することがわかった 9 .ただ
し,エージェント数の増加に伴い単純増するわけではなく,非線形な増加をする.
計算機シミュレーションを行った結果を基に,ロボット群実験を行った.計算機シミュレーショ
ン結果から, , 体程度のロボット群でも十分にフェロモン・コミュニケーションを行うことを
確認できたので,ロボット群実験でも , 体のロボットを用いた.実験の結果,ロボット群は計
算機シミュレーションと同様に敷設回数 0 はエージェント数の増加に大きな影響を受
けず,強化回数 ! はコロニー・サイズによって増加することがわかった.
計算機シミュレーションとロボット群実験では,敷設・強化回数それぞれに大きな差があった
9 .計算機シミュレーション内では * 半径を <= としていたが,実際のロボット群
実験では * 周辺でのロボットの破損を考慮して * 自体を発光させて <= 程度から * に
接近することができるようにした.その結果,ロボット群実験では * が見かけより大きくなっ
ている.ロボット群実験の設定を計算機シミュレーションに取り入れた結果,計算機シミュレー
ションとロボット群実験の結果は近づいた 9 .
敷設回数と強化回数の和は,採餌回数である.採餌回数を個体数で割った値を採餌効率と定義
した $R .個体数を増加させた場合,採餌効率は低下するという結果を得た 9 .
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
群れのパフォーマンスに対する活動環境サイズの拡張性に関する性質
本節では,活動環境サイズの大小が群れのパフォーマンスに与える影響について調べる.前節
では,活動環境を固定し,エージェント数を操作した.しかし,本節ではエージェント数を固定
し,活動環境のサイズを操作パラメータとして与える.
計算機シミュレーション実験
本節では,計算機シミュレーションによってフェロモン・コミュニケーションの活動環境の大小
に対する特性を検討する.計算機シミュレーションを用いて個体数を固定し,活動環境サイズを
増加させる.活動環境を増加させることによって活動環境内の個体密度を減少させたときの群れ
の振る舞いを観測する.
計算機シミュレーション設定
シミュレーションにおいて,エージェント数は <体= とし,フィールドサイズは ; ;
; ; <= とする.また,9 に示すように実験フィールド上の と * は短辺
の対面に設置する.また,シミュレーション時間は 分間とした.フェロモンの蒸発・拡散は式
に基づく.各パラメーターは,実機実験で用いるエタノールを想定して以下のように設定し
た.蒸発係数 は付録 によって導出される.本シミュレーションのフェロモン濃度は K
と設定した.また,計算における刻み時間は <= と設定した.4 % に本節で行う計算機シ
ミュレーションにおける主要なパラメータをまとめる.
4 % ? ) ! % ! &0 @
# )% ! &0 @
; ; ; ; <=
# K
エージェントが 初期状態 のときに * を発見,フェロモン・トレイルの敷設を行う行動
を I敷設 0Jと定義し,フェロモン・トレイルを発見し,誘引された後に * を発見
しフェロモン・トレイルの再敷設を行う行動を I強化 !Jと定義する.強化が行われる
ことは,エージェントが環境から情報を取得し,その情報に対応したことを示し,フェロモン・コ
ミュニケーションが成立したことを示す.本研究では,敷設・強化回数をフェロモン・コミュニ
ケーションのパフォーマンスの評価値としてカウントする.
計算機シミュレーション結果
エージェントの初期位置をランダムに変更して 分間 # のシミュレーションを 回行った.活動環境サイズが, ; ; ; ; <= のときの計算機シミュレーション
実験を行った.
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
180㽢180[cm]
Prey
180㽢360[cm]
Prey
180㽢540[cm]
Prey
Nest
Nest
180㽢720[cm]
Nest
180㽢900[cm]
Prey
Nest
Prey
Nest
9 ? ) &0: ; ; ; ; <=
9 に計算機シミュレーション実験の結果を示す.縦軸は敷設・強化回数の平均を示し,
横軸は活動環境のサイズを表している.黒の棒は敷設回数の平均,灰色の実線は強化回数の平均
の計算機シミュレーション結果を示す.9 に示されるように,活動環境サイズの増加に伴
い,強化回数 フェロモン・コミュニケーション回数 は敷設回数と比較して大きく減少すること
が分かった.活動環境サイズが <= のとき敷設・強化回数はそれぞれ 回・ 回,
<= のとき敷設・強化回数は,それぞれ 回・ 回, <= のとき敷設・強
化回数はそれぞれ 回・ 回, <= のとき敷設・強化回数はそれぞれ 回・ 回,
<= のとき,敷設・強化回数は,それぞれ 回・ 回であった 4 % .
4 % ? ) ) ! &0 %
90 @
/ 0 .!
<=
<=
<=
<=
<=
9 に活動環境サイズが <= のときのシミュレーション例を示す. : <=
9 , は,計算機シミュレーションの初期状態であり,エージェントは実験フィール
ドにランダムに配置される. : <= 9 , では,エージェントがフェロモン・ト
レイルを敷設しているのがわかる. : <= 9 , ; では,エージェント群
がフェロモン・トレイルを強化し, : <= に比べてフェロモン・トレイルが強化されているこ
とがわかる.最終的に, : <= 9 , ではフェロモン・トレイルが大きく強化
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
Number of times
50
40
Laying down (sim.)
Reinforcing (sim.)
30
20
10
0
1
2
3
Field size
4
5
9 ? . # % #! ! # ) 0 @ !
&0 ) )
され,エージェント群が相互にフェロモン・コミュニケーションしていることがわかる.
9 に活動環境サイズが <= になったときのシミュレーション例を示す.活動環
境サイズが <= のときと同様に, : <= 9 , は,計算機シミュレーショ
ンの初期状態であり,エージェントは実験フィールドにランダムに配置される. : <= 9
,; では,エージェントは * を探索している. : <= 9 , で
は,エージェント群がフェロモン・トレイルを敷設していることがわかる.最終的に, : <=
9 , ではフェロモン・トレイルが強化され,エージェント群が相互にフェロモン・
コミュニケーションしていることがわかる.しかし,9 と比較して,フェロモン・トレイ
ルは十分に強化されていない.
9 に活動環境サイズが <= のときのシミュレーション例を示す.活動環境サイ
ズが 面のときと同様に, : <= 9 , は,計算機シミュレーションの初期状態
であり,エージェントは実験フィールドにランダムに配置される. : <= 9 ,; では,エージェントは * を探索している. : <= 9 , では,エージェ
ント群がフェロモン・トレイルを敷設していることがわかる.しかし,フェロモン・トレイルは
強化されず : <= 9 , ではフェロモン場が弱くなっている.
9 に活動環境サイズが <= になったとき,9 に活動環境サイズが
<= になったときのシミュレーション例を示す.この条件下では,* を発見するこ
とができずフェロモン・コミュニケーションはおろかフェロモン・トレイルの敷設も行っていない.
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
0 min
0 min
Prey
Prey
Nest
Nest
5 min
5 min
Pheromone trail
Agent
10 min
10 min
15 min
15 min
20 min
20 min
9
? ) ) :;
&0: <=
Pheromone trail
9
? ) ) :;
&0: <=
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
0 min
0 min
Prey
Prey
Nest
Nest
5 min
5 min
10 min
10 min
15 min
Pheromone trail
20 min
9
? ) ) :;
&0: <=
15 min
20 min
9
? ) ) :;
&0: <=
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
0 min
Prey
Nest
5 min
10 min
15 min
20 min
9 ? ) ) :; &0: <=
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
ロボット群実験
ロボット群実験設定
計算機シミュレーションと同様に実験フィールドのサイズを ; <= に変化させた .
また, と * は実験フィールドの対面する辺の中央に設置した.計算機シミュレーションと
同様に投入するロボット数を 体に固定し,実験フィールド・サイズ毎に 回の実験を行った.
4 % に本節で行うロボット群実験における主要なパラメータをまとめる.
4 % ? $># ! &0 %
# )% ! &0 @
; <=
# K
ロボット群実験結果
活動環境サイズの増加に伴う実機の増加に伴う敷設回数・強化回数を 9 に示す.黒・灰
色の棒グラフは,それぞれロボット群実験における敷設回数の平均,強化回数の平均を示す.活動
環境サイズが実験フィールド 面のとき,敷設・強化回数は,それぞれ 回・ 回であった.
活動環境サイズが実験フィールド 面のとき,敷設・強化回数は,それぞれ 回・ 回であった
4 % .計算機シミュレーション実験と同様に活動環境サイズの増加に伴ってコミュニケー
ション回数が減少する振る舞いが観測された.この結果は,計算機シミュレーション結果と同様
の傾向である.活動環境サイズが増加してもロボットの環境に対する探査能力は一定なので,活
動環境サイズが増えると敷設・強化回数は共に減じる.計算機シミュレーションとロボット群実
験の結果の差異については,後述する.
4 % ? $># ) ! &0 %
90 @
/ 0 .!
<=
<=
9 に,ロボット数を 体,実験フィールド 面としたときの通常のカメラで撮影した画像
とサーモグラフィで計測した : <= のときの実験環境の温度分布を示す : <=
9 ,;8 では,実験者がロボットを実験フィールドに設置した初期状態であり,環境中に
フェロモン場は生成されていない. : <= 9 ,5;58 では,白矢印部分にフェロモン・
トレイルが生成されている. : <= 9 ,(;(8 では,群れはフェロモン・トレイルの
強化を行っている.複数体がフェロモン場を強化することによって : <= 9 ,-;-8
のようにフェロモン場のフェロモンが濃くなっていることがわかる.最終的に, : <= 9
これ以上の実験環境は用意することが不可能であった.
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
Number of times
50
Laying down (exp.)
Reinforcing (exp.)
40
30
20
10
0
1
2
Field size
9 ? . # % #! ! # ) 0 @ !
&0 $># )
,$;$8 では,ロボット群はフェロモン・トレイルを敷設・強化することによってフェロモン・
コミュニケーションを行っていることがわかる.
9 に,ロボット数を 体,実験フィールド 面としたときの通常のカメラで撮影した画像
とサーモグラフィで計測した : <= のときの実験環境の温度分布を示す : <=
9 ,;8 では,実験者がロボットを実験フィールドに設置した初期状態であり,環境中に
フェロモン場は生成されていない. : <= 9 ,5;58 においても,フェロモン・トレイル
は敷設されていない. : <= 9 ,(;(8 では,複数のフェロモン・トレイルを敷設して
いる.複数体がフェロモン場を強化することによって : <= 9 ,-;-8 のようにフェ
ロモン場のフェロモンが濃くなっていることがわかる.最終的に, : <= 9 ,$;$8
では,ロボット群はフェロモン・トレイルを敷設・強化することによってフェロモン・コミュニ
ケーションを行っていることがわかる.
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
9 ? $># ) :; &0: <=
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
9 ? $># ) :; &0: <=
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
議論
計算機シミュレーションとロボット群実験の比較
本節では,計算機シミュレーション実験結果とロボット群実験結果の差異について議論する.計
算機シミュレーションとロボット群実験結果の活動環境サイズの変化とフェロモン・コミュニケー
ション回数の関係を 9 に示す.縦軸は敷設・強化回数の平均を示し,横軸は活動環境サイ
ズを表している.黒・灰色の棒グラフは,それぞれ計算機シミュレーションの敷設・強化回数を
示す.また,赤・青色の実線は,それぞれロボット群実験の敷設・強化回数を示す.
Number of times
50
40
30
Laying down (sim.)
Reinforcing (sim.)
20
Laying down (exp.)
Reinforcing (exp.)
10
0
1
2
3
Field size
4
5
9 ? . # % #! ! # ) 0 @ !
&0 ) 0 ># )
9 が示すように,計算機シミュレーション実験,ロボット群実験の両方において敷設回
数に大きな差はない.しかし,特に活動環境サイズが実験フィールド 面のときに強化回数に大き
な差がある.ここでは,この活動環境サイズが実験フィールド 面のときの計算機シミュレーショ
ン実験とロボット群実験の差異について議論する. 節では,活動環境を実験フィールド 面と
し,対角に と * を設置して計算機シミュレーションとロボット群実験を行った.この場
合,9 に示すように,計算機シミュレーション結果とロボット群実験結果には整合性が見
られた. 節で行った計算機シミュレーション実験,ロボット群実験の設定と本節で行った実験
の異なる点は, と * の設置箇所のみである. 節で行った実験に対して,本節で行った
計算機シミュレーション実験・ロボット群実験では,・* 間の距離が短い.故に,フェロ
モン・トレイルの長さも短くなる.以下,・* 間の距離が短くなったときに発生すると考
えられる問題について議論する.
・* 間距離が短くなると,必然的に ・* 間に敷設されるフェロモン・トレイル
の距離も短縮される.フェロモン・トレイルの距離が短縮されるということは,フェロモン・ト
レイルの発見可能性が低下する.そのため,フェロモン・トレイル追従が行われなくなり,強化回
数が低下することが考えられる.9 における,実験フィールド 面のときの計算機シミュ
レーション実験結果とロボット群実験結果の差異は,フェロモン・トレイルの長さが原因である
と考える.計算機シミュレーションと比べ,ロボット群実験では は明確に定義されているわ
けではない.ロボットは, 位置に設置された赤外線ランプを参照し, 位置を推定してい
る.ロボットは個々に 範囲を検出しており,その 範囲には当然個体差が存在する.そ
のため,ロボット が ・* 間に敷設するフェロモン・トレイルと,ロボット 5 がロボット
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
が ・* 間に敷設するフェロモン・トレイルは長さが異なる.このフェロモン・トレイル
の差がトレイルの長さが短いときには顕著になり,ロボット群実験結果の強化回数の低下に影響
しているものと考える.
採餌効率に関する考察
9 から示されるように,活動環境を大きくすると採餌回数が減少する.そのため,大き
な活動環境で採餌回数を増加 維持 させるためには,個体数を大きくする必要があると考えられ
る.しかし, で述べたように,個体数の増加は採餌効率を減じる.ここでは,活動環境が大
きくなったときの群れの採餌効率を検討する.9 , に各活動環境の採餌効率を示す.
Field=180x180
10
Number of times
100
80
8
Laying down (sim.)
Reinforcing (sim.)
Energy/Population
60
6
40
4
20
2
0
0
0
5
10
15
20
Number of robots
25
30
9
?
. # % ! Æ
90: <=
35
40
0 )% !
Field=180x360
3
Number of times
50
2.5
40
Laying down (sim.)
Reinforcing (sim.)
Energy/Population
30
2
1.5
20
1
10
0.5
0
0
0
5
10
15
20
Number of robots
25
9
?
. # % ! Æ
90: <=
30
35
40
0 )% !
横軸は個体数を示し,左縦軸は採餌回数 敷設回数,強化回数,右縦軸は採餌効率を示す.活
動環境サイズが <= のとき 9 ,採餌効率が最大になる個体数は 体である.活
動環境サイズが <= のとき 9 ,採餌効率が最大になる個体数は 体である.活
動環境サイズが <= のとき 9 ,採餌効率が最大になる個体数は 体である.活
動環境サイズが <= のとき 9 ,採餌効率が最大になる個体数は 体である.
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
Field=180x540
40
1.8
1.6
Number of times
35
30
1.4
1.2
Laying down (sim.)
Reinforcing (sim.)
Energy/Population
25
20
1
0.8
15
0.6
0.4
10
5
0.2
0
0
0
5
10
15
20
Number of robots
25
30
9
?
. # % ! Æ
90: <=
35
40
0 )% !
Field=180x720
30
1.2
Number of times
25
1
Laying down (sim.)
Reinforcing (sim.)
Energy/Population
20
15
0.8
0.6
10
0.4
5
0.2
0
0
0
5
10
15
20
Number of robots
25
30
9
?
. # % ! Æ
90: <=
35
40
0 )% !
Field=180x900
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
Number of times
25
20
Laying down (sim.)
Reinforcing (sim.)
Energy/Population
15
10
5
0
0
5
10
15
20
Number of robots
25
9
?
. # % ! Æ
90: <=
30
35
40
0 )% !
活動環境サイズが <= のとき 9 ,採餌効率が最大になる個体数は 体である
4 % .このように,活動環境サイズの増加に従い採餌効率が最大になる個体数は増加する
傾向にある.これは,活動環境サイズの増加に伴って,*, 間の距離が延長し,少ない個体
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
数ではフェロモン・コミュニケーションを行うことが困難になることが考えられる.
4 % ? ) ) ! ! Æ
90 @
1 > ! Æ
<=
<=
<=
<=
<=
結論
本節では,エージェント ロボット 数を固定し,活動環境サイズを操作するというアプローチ
でエージェント密度が群れに与える影響を調査した.計算機シミュレーションから,活動環境サイ
ズを大きくするとフェロモン・トレイルの強化回数が低下することが観測された 9 .計
算機シミュレーションでは,活動環境サイズが <= のとき,敷設・強化回数は,それぞ
れ 回・ 回,活動環境サイズが <= のとき,敷設・強化回数は,それぞれ 回・
回であった 4 % .計算機シミュレーション結果から,エージェント群は活動環境が増
大することでフェロモン・コミュニケーションを行い難くなることがわかった.
計算機シミュレーション結果に基づいて,ロボット群実験を行った.ロボット群実験では,活動
環境サイズが <= のとき,敷設・強化回数は,それぞれ 回・ 回,活動環境サイ
ズが <= のとき,敷設・強化回数は,それぞれ 回・ 回であった 4 % .計算
機シミュレーション結果と同様に,ロボット群実験でも活動環境の増大によってフェロモン・コ
ミュニケーションを行い難くなることがわかった.
計算機シミュレーションとロボット群実験では,活動環境が <= のときの結果に大き
な差が認められた.この結果の差は,活動環境が狭いときのフェロモン・トレイルの長さの差に
起因する問題と考えられる.
9 , に示すように,採餌効率は活動環境の増大に伴って個体数が増加する傾向が見ら
れる.フェロモン・コミュニケーションを行うにはフェロモン・トレイルを維持する必要がある.
フェロモン・トレイルの維持には以下の つの要素が必要になる.
* の発見
フェロモン・トレイルの発見
フェロモン・トレイルの追従
個体数を固定している場合,活動環境が増大するに従ってエージェント単体あたりの探索面積に
変化が無いために * の発見確率が低下するため, を期待することは困難になる.また,活動
環境の増大は *, 間の距離を延長するため, を期待することができるが,*, 間
の距離が長いために蒸発速度が増して を期待できなくなる.
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
群れのパフォーマンスに対するフェロモンの濃度依存性に関する性質
道標フェロモン,昆虫の触覚の代用としてエタノールとアルコール・センサを用いている.高
濃度フェロモンは持続時間が短く,低濃度フェロモンは持続時間が長い.この問題は,現実の蟻に
おいても同様にフェロモン・コミュニケーションする上でフェロモンの混合比を調整しているこ
とを示唆する研究も複数報告されている <S =.我々の研究でも,フェロモン混合比を変化させ
ることによってコミュニケーション回数が変化することがわかっている <=.本節では,群ロボッ
トにおけるフェロモン・コミュニケーションにおけるフェロモンの濃度依存性について議論する.
計算機シミュレーション実験
計算機シミュレーション設定
シミュレーションにおいて,エージェント数は <体= とし,フィールドサイズは <= と
する.実験フィールド上の と * は対角に設置する.9 にシミュレーション環境を
示す.
Prey
Nest
9 ? ) :; &0: <=
また,シミュレーション時間は 分間とした.フェロモンの蒸発・拡散は式 に基づく.各
パラメーターは,実機実験で用いるエタノールを想定して以下のように設定した.蒸発係数 は付録 によって導出される.本シミュレーションのフェロモン濃度は , K において K
毎に設定した.また,計算における刻み時間は <= と設定した.4 % に本節で行う計算機
シミュレーションにおける主要なパラメータをまとめる.
4 % ? ) ! % ! # # )% ! &0 @
<=
# , K .) K エージェントが 初期状態 のときに * を発見,フェロモン・トレイルの敷設を行う行動
を I敷設 0Jと定義し,フェロモン・トレイルを発見し,誘引された後に * を発見
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
しフェロモン・トレイルの再敷設を行う行動を I強化 !Jと定義する.強化が行われる
ことは,エージェントが環境から情報を取得し,その情報に対応したことを示し,フェロモン・コ
ミュニケーションが成立したことを示す.本研究では,敷設・強化回数をフェロモン・コミュニ
ケーションのパフォーマンスの評価値としてカウントする.
計算機シミュレーション結果
エージェントの初期位置をランダムに変更して 分間 # のシミュレーションを 回行った.エージェント数? 体のときの実験を 回行った.9 に計算機シミュレーショ
ン実験の結果を示す.縦軸は敷設・強化回数の平均を示し,横軸はエージェント数を表している.
黒の縦棒は敷設回数の平均,灰色の縦棒は強化回数の平均の計算機シミュレーション結果を示す.
㻺㼡㼙㼎㼑㼞㻌㼛㼒㻌㼠㼕㼙㼑㼟
㻝㻡
㻸㼍㼥㼕㼚㼓㻌㼐㼛㼣㼚
㻾㼑㼕㼚㼒㼛㼞㼏㼕㼚㼓
㻝㻜
㻡
㻜
㻜
㻝㻜
㻞㻜
㻟㻜
㻠㻜
㻡㻜
㻢㻜
㻣㻜
㻼㼔㼑㼞㼛㼙㼛㼚㼑㻌㼏㼛㼚㼏㼑㼚㼠㼞㼍㼠㼕㼛㼚㻌㼇㻑㼉
㻤㻜
㻥㻜
㻝㻜㻜
9 ? . # % #! ! # ) # 0 9 が示すように,フェロモン濃度が K のときと比べてフェロモン濃度が , K のと
きに敷設 0・強化 ! 回数が多い.これは,フェロモン・コミュニケーショ
ンを行って集団採餌を行う方がランダム・ウォークで餌を発見して採餌するよりも効果的である
ことを示す.また,フェロモン濃度を上げるにつれて敷設・強化回数が逆転する現象が見られる.
この現象は,フェロモンの蒸発速度が原因になっている.蒸発速度が上がることによって,環境
中にフェロモンが残り難くなり,フェロモン・トレイルを敷設しても,フェロモンを用いていない
状態とさほど変わらないことになってしまっている.
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
ロボット群実験
ロボット群実験設定
実験フィールドのサイズを <=, と * は実験フィールドの対角に設置した 9
.実験フィールドに投入するロボット数は 体とした.本節の観測対象の現象は,フェロモ
ン・トレイルの濃度が群れのパフォーマンスに与える影響であるので,ロボットに搭載するフェ
ロモン エタノール 濃度を ,,,, K とし,各濃度につき 回の実験を行った. 回
の実験時間は前節までと同様に 分とした.4 % に本節で行うロボット群実験における主
要なパラメータをまとめる.
Nest
Robots
Prey
9 ? $># ! 0#0 ! # 4 % ? $># ! 0#0 ! # # )% ! &0 @
<=
# , K .) K ロボット群実験結果
ロボット群実験の結果を 9 に示す.9 が示すように,ロボット群実験の結果は計
算機シミュレーションの結果 9 と同様の傾向を示している.しかし,計算機シミュレー
ション結果とロボット群実験の結果に差異が大きい.これは,フェロモン濃度に関するモデル化
が限定的ではあるが有効であることを示している.4 % に実験結果の数値を示す.
計算機シミュレーション実験と同様に,9 が示すように,フェロモン濃度が K のとき
と比べてフェロモン濃度が , K のときに敷設 0・強化 ! 回数が多い.
これは,フェロモン・コミュニケーションを行って集団採餌を行う方がランダム・ウォークで餌
を発見して採餌するよりも効果的であることを示す.また,計算機シミュレーションほどではな
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
㻝㻡
㻺㼡㼙㼎㼑㼞㻌㼛㼒㻌㼠㼕㼙㼑㼟
㻸㼍㼥㼕㼚㼓㻌㼐㼛㼣㼚
㻾㼑㼕㼚㼒㼛㼞㼏㼕㼚㼓
㻝㻜
㻡
㻜
㻜㻑
㻞㻡㻑
㻡㻜㻑
㻣㻡㻑
㻝㻜㻜㻑
㻼㼔㼑㼞㼛㼙㼛㼚㼑㻌㼏㼛㼚㼏㼑㼚㼠㼞㼍㼠㼕㼛㼚
9 ? $># ) ! 0#0 ! # 4 % ? $># ) ! 0#0 ! # # 0 !
K
K
K
K
K
いが,フェロモン濃度を上げるにつれて敷設回数が強化回数に迫る現象が見られる.この現象は,
計算機シミュレーションと同様にフェロモンの蒸発速度が原因になっている.蒸発速度が上がる
ことによって,環境中にフェロモンが残り難くなり,フェロモン・トレイルを敷設しても,フェロ
モンを用いていない状態とさほど変わらないことになる.
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
議論
計算機シミュレーションとロボット群実験に関する議論
計算機シミュレーション結果とロボット群実験結果を 9 に示す.
㻸㼍㼥㼕㼚㼓㻌㼐㼛㼣㼚㻔㼟㼕㼙㻚㻕
㻾㼑㼕㼚㼒㼛㼞㼏㼕㼚㼓㻔㼟㼕㼙㻚㻕
㻸㼍㼥㼕㼚㼓㻌㼐㼛㼣㼚
㻸㼍㼥㼕㼚㼓㻌㼐㼛㼣㼚㻔㼑㼤㼜㻚㻕
㻾㼑㼕㼚㼒㼛㼞㼏㼕㼚㼓
㻾㼑㼕㼚㼒㼛㼞㼏㼕㼚㼓㻔㼑㼤㼜㻚㻕
㻺㼡㼙㼎㼑㼞㻌㼛㼒㻌㼠㼕㼙㼑㼟
㻝㻡
㻝㻜
㻡
㻜
㻜
㻝㻜
㻞㻜
㻟㻜
㻠㻜
㻡㻜
㻢㻜
㻣㻜
㻼㼔㼑㼞㼛㼙㼛㼚㼑㻌㼏㼛㼚㼏㼑㼚㼠㼞㼍㼠㼕㼛㼚㻌㼇㻑㼉
㻤㻜
㻥㻜
㻝㻜㻜
9 ? ) 0 ># ) ! 0#0 ! # 9 に示すように,計算機シミュレーション結果とロボット群実験結果は必ずしも一致し
ない.例として, K のフェロモンを用いた実験に注目する 9 の K.計算機シミュ
レーション実験では,敷設 0 が強化 ! を完全に上回っている.これは,フェ
ロモン・コミュニケーションを行った集団採餌よりもランダム・ウォークから * を発見する個
体採餌の回数の方が多いことを示す.この原因としては,以下の 点が考えられる.
計算機シミュレーションにおけるフェロモン・モデルのモデル化誤差
モデル設計時の実験条件とロボット群実験時における室温・湿度の差
ロボットのフェロモン放出量誤差
付録 で行った計測は精密な電子秤で行った.そのため,モデルに誤差は少ないと考えられる.
しかし,モデル設計時に行った実験条件と実際のロボット群実験時では条件が異なる.特に室温・
湿度の差が大きい.予備実験時の室温は ℃であり,湿度は K であった.しかし,ロボット群
の実験を行う部屋は室温 ℃程度,湿度はその日の天気次第であるが K 程度である.つまり,
ロボット群実験を行う部屋の方が室温が高く,フェロモン エタノール は蒸発・消失しやすい.し
かし,9 に示すようにロボット群実験の方がフェロモン・トレイルが残留しやすいという
結果になっている.このことから, ロボットのフェロモンの放出誤差が計算機シミュレーショ
ンとロボット群実験間の誤差を生み出していると考えられる.ロボットに搭載しているマイクロ
ポンプは毎分 <L= の液体を放出する能力がある.このポンプを用いると,必要以上のフェ
ロモンを実験環境に放出してしまい,フェロモン・トレイルが実験時間 分間 以上残留してし
まう.そのため,9 に示すように,タンク・ポンプ間とポンプ・排出間に圧力抵抗を設けて
いる.これはネジ式の圧力抵抗であるが,実験中に圧力抵抗が下がっている可能性がある.この
結果,フェロモンの放出量が増加し,環境中の残留時間が延長していることが考えられる.
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
ロボット群に関する議論
本研究では,エタノールをフェロモンの代用に用いている.エタノールと水の混合はロボット
にとってトレード・オフ問題をもたらす.高濃度フェロモン エタノール はシグナル強度は強い
が持続時間が短い.低濃度フェロモンはシグナル強度は弱いが持続時間が長い.このトレード・オ
フ問題は群れにとって非常に興味深い問題である.動的なタスクに対しては,短い持続時間が求
められる.もし,シグナル持続時間が長ければ,フェロモン・トレイルは可塑性を失い,動的な
問題に対する機能は低下する.この例は,フェロモン・コミュニケーションを行うロボット群には
適切なフェロモン濃度が必要なことを示唆する.ロボット群は K までのフェロモンに対して感
受性を持つようにセンサを設定している.より低濃度のフェロモン 例えば K 以下 のフェロモ
ンを検出することは困難になる.このため,残留時間とシグナル強度の関係はトレード・オフな
問題になる.
昆虫学からの議論
今回構築したシステムは,社会性昆虫のリクルート 召集 行動を模している.リクルート行動
は,集団行動 採餌や巣の移動 が必要な場所に巣仲間を呼び寄せるコミュニケーションのことで
ある <=.典型的な例としては,ヒアリ属 # の一種における,採餌リクルート行動が挙
げられる <=.リクルート行動とそれに続く集団行動の間,道標フェロモンは,集団コミュニケー
ションに重要な役割を果たすことになる.
今回結果の主要なポイントは,道標フェロモンがフェロモン以外の物質と混合して分泌される
ときには,最適な中間的濃度があるということである.アリでは,道標フェロモンは主として毒腺
# 0,デュフール腺 -)!)8 0 や後腸から分泌される.これらの分泌腺は,他
の多くの化学物質を分泌することでも知られている <=.これらの化学物質は,複雑なコミュニ
ケーションシステムを持ついくつかの社会性昆虫において,時として高度に特化したフェロモン
となっている.したがって,道標フェロモンが,道標フェロモンの活性を持たない化学物質とと
もに分泌されることはよくあると考えられる.一般的に,混合状態での化学物質の揮発性は,そ
の溶液の表面に存在する分子数に比例する.よって,そのとき道標フェロモンの揮発性は,フェ
ロモン単独で存在するときよりも低くなっていると考えられる.本システムは,水とエタノール
の混合物を用いており,揮発性は分子間相互作用によっても影響を受けると思われるが,一般的
な傾向はどんな混合物フェロモンにおいても成り立つと考える.
生物における道標フェロモン混合物の物理化学的性質については,生物学の今後の研究課題で
ある.道標フェロモンに関する先行研究では,フェロモン物質は人為的に有機溶媒 アセトンやヘ
キサン;これらは非常に迅速に揮発する に溶解させた状態で研究されており,
「生物溶媒」にさ
まざまな濃度で溶解させたフェロモンの揮発性などは考慮されていないように思われる.いくつ
かの研究において,道標フェロモンの量について,中間的な量が最適であるという結果が得られ
ている <; =.そしてそれらの結果は,昆虫の触角の感度の文脈で議論されている:すなわち,
フェロモン量が多すぎると,道標の両側に拡散してしまい道標を追随するのが困難になってしま
うし,少なすぎると,道標を追随すること自体が困難になってしまうということである.この結
果は,フェロモン濃度の新しい側面に光を当てるものである.私は,社会性昆虫は混合溶液とし
て分泌する道標フェロモンにおいて,最適な中間濃度のフェロモンを進化させていると考えてい
る:すなわち,高すぎる濃度は揮発性の点で問題があり,低すぎる濃度は,感受性の点で問題があ
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
る,ということである.このことは,フェロモン分子そのものがまったく同じ絶対量であっても,
他の非フェロモンとの兼ね合いで 成立するものである.
今回の結果はさらなる示唆をもたらす.第一に,本システムは,変動環境下で柔軟性をもつ可
能性がある.外部の微環境,たとえば温度や湿度,表面物質などは常に変化している.リクルー
ト行動と,それに続く道標追随行動のシステムは,これらの摂動に対してロバストである必要が
ある.道標フェロモンが単独の活性物質で構成されているような種において,混合溶液の中での
フェロモン濃度調節は,変動環境に対処する方法を提供する可能性がある.本ロボットシステム
においても,また実際の生物においても,これは調べる必要がある.
第二に,いくつかの社会性昆虫において,道標フェロモンは複数の構成要素からなる化学物質
であることが知られている.この現象は今のところ,種特異性や相乗効果の観点から論じられて
いる <=.さらにいくつかの種において,最適な道標追随活性をもたらす中間的な混合比がある
ことも知られている <S =.これらの例では,各々の化学物質は単独でも道標活性を持っている
ようであるが,混合溶液の揮発性を考慮したわれわれのシステムは,この現象をあるていど説明
できるかもしれない.
第三に,今回の実験で得た結果は,さまざまな生活史戦略をもつ複数のアリ種が,道標フェロモン
として同一の物質を利用している理由を説明できる可能性がある.フタフシアリ亜科 1 において,毒腺から分泌されるアルキルピラジンは,しばしば道標フェロモンとして利用されて
いる <=.特に,,エチル,;,ジメチルピラジン ,,;,0# @ は頻繁に利用さ
れている.この共通性は系統的制約によっても説明できるかもしれないが,採餌や巣の移動など,
生活史戦略が非常に分化しているそれらの種においては,それに対応したフェロモン活性の微調
整が必要であろう.したがってそれらの種において,物質は同一でも 混合溶液の濃度の違いが
観察される可能性がある.今後の研究において,フェロモン濃度と生活史戦略の比較研究が興味
深い対象となると考えられる.
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
群れの規模に対するロバストネス
一般的に,マルチ・エージェントシステム ), において,個体数の大小によっ
て群れの振る舞いが変化することが知られている.よく知られている例としては,交通渋滞が挙
げられる.狭い環境で車両が少ない場合,交通渋滞はほどんと気にしなくてもよい.しかし,大
規模な交通システムでは交通渋滞を考慮せねばならない.本節では,活動環境における個体密度
を固定し計算機シミュレーションによって群れの規模に対するロバストネスを検討する.個体密
度を固定して活動環境サイズを大きくすることは,実ロボットを用いた実験では物理的な制約か
ら困難であった.本節では,計算機シミュレーションを用いて集団的な振る舞いを検討する.
本節の目的を以下のように設定する.
計算機シミュレーションを用いて,環境の個体密度を固定したときの集団の挙動を観測する.
計算結果に基づき,個体密度が固定されているときの普遍的な振る舞いを検討する.
計算機シミュレーション実験
本節では,計算機シミュレーションによってフェロモン・コミュニケーションの個体数に対する
特性を検討する.計算機シミュレーションを用いて活動環境サイズを固定し,個体数を増加させ
る.個体数を増加させることによって活動環境内の個体密度を増加させたときの群れの振る舞い
を観測する.
計算機シミュレーション設定
シミュレーションにおいて,フィールドサイズは <= を縦横に整数倍した面積とする.
各実験フィールドにおけるエージェントの個体密度を固定するために,個体数は <= あ
たりに 体とし 4 % のように設定する.
4 % ? ) ! % ! 90 @
)% ! <=
<=
<=
<=
<=
<=
<=
<=
<=
<=
また, に示すように実験フィールド上の と * は短辺の対面に設置する.シミュレー
ション時間は 分間とした.フェロモンの蒸発・拡散は式 に基づく.各パラメーターは,実
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
機実験で用いるエタノールを想定して以下のように設定した.蒸発係数 は付録 によって
導出される.本シミュレーションのフェロモン濃度は,K から K まで K 毎に設定した.ま
た,計算における刻み時間は <= と設定した.
エージェントが 初期状態 のときに * を発見,フェロモン・トレイルの敷設を行う行動
を I敷設 0Jと定義し,フェロモン・トレイルを発見し,誘引された後に * を発見
しフェロモン・トレイルの再敷設を行う行動を I強化 !Jと定義する.強化が行われる
ことは,エージェントが環境から情報を取得し,その情報に対応したことを示し,フェロモン・コ
ミュニケーションが成立したことを示す.本研究では,敷設・強化回数をフェロモン・コミュニ
ケーションのパフォーマンスの評価値としてカウントする.
計算機シミュレーション結果
9 , に計算機シミュレーションの実行の様子を示す.9 は,個体数 ,活動
環境サイズ <= のときの計算機シミュレーションの様子である.活動環境上の青いメッ
シュはフェロモン場を示す. : <= 9 , は,計算機シミュレーションの初期状
態であり,エージェントは実験フィールドにランダムに配置される. : <= 9 , では,エージェントが実験フィールド内で *・ 間にフェロモン.トレイルを敷設してい
る. : <= 9 , では,エージェント群はフェロモン・トレイルを強化して
いる. : <= 9 , では,エージェント群がフェロモン・トレイルを強化し,
: <= に比べてフェロモン・トレイルが強化されていることがわかる.最終的に, : <=
9 , ではフェロモン・トレイルがさらに強化されている.同様の傾向が 9 個
体数 ,環境サイズ <=,9 個体数 ,環境サイズ <=,9 個
体数 ,環境サイズ <= においても見られる.
そこで,9 に計算機シミュレーション結果を示す.縦軸は敷設・強化回数を示し,横
軸はフェロモン濃度を示す.黒棒は敷設回数の平均,灰色の棒は強化回数の平均の計算機シミュ
レーション結果を示す.9 ; ; ; ; ; ;
; ; ; <= は,それぞれ個体数 ; ; ; ; ;
; ; ; ; 体,活動環境サイズ ; ; ; ; ;
; ; ; ; <= のときのフェロモン濃度と敷
設・強化回数の関係を示す.
本節の計算機シミュレーションは,環境中の個体密度を一定にしたときの敷設・強化回数の変
化を観測することを目的としている.環境サイズが <= のときは,*, 間の距離
が著しく短く,環境中に占める * 面積が相対的に大きい.そのため,敷設回数が増加し,その
結果強化回数が他のシミュレーション条件のときに比べて多いと考えられる 節参照.この
条件を例外として扱えば,個体密度が固定されていればフェロモン・コミュニケーションを行う
群れはフェロモン濃度を固定した場合,同程度のパフォーマンスを示すことがわかる.
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
Nest
Prey
180㽢180[cm]
Nest
Prey
Prey
1620㽢1620[cm]
Prey
Nest
Prey
1080㽢1080[cm]
Prey
1260㽢1260[cm]
Nest
Nest
720㽢720[cm]
900㽢900[cm]
Nest
Prey
360㽢360[cm]
540㽢540[cm]
Nest
Nest
Nest
Prey
1440㽢1440[cm]
Prey
Nest
Prey
1800㽢1800[cm]
9 ? ) ! % ! &0: ; ; ;
; ; ; ; ; ; <=
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
Nest
Prey
Nest
0min
0min
Pheromone trail
Pheromone trail
5min
Prey
5min
10min
10min
15min
15min
20min
20min
9 ? ) ) : ; 9 ? ) ) :;
&0: <=
&0: <=
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
Nest
Prey
0min
Nest
Prey
0min
Pheromone trail
Pheromone trail
5min
5min
10min
10min
15min
15min
20min
20min
9 ? ) ) :; 9 ? ) ) : ;
&0: <=
&0: <=
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
㻲㼕㼑㼘㼐㻩㻝㻤㻜㼤㻝㻤㻜㼇㼏㼙㼉
㻢㻜
㻺㼡㼙㼎㼑㼞㻌㼛㼒㻌㼠㼕㼙㼑㼟
㻺㼡㼙㼎㼑㼞㻌㼛㼒㻌㼠㼕㼙㼑㼟
㻠㻜
㻞㻜
㻜
㻜
㻝㻜
㻞㻜
㻟㻜
㻠㻜
㻡㻜
㻢㻜
㻣㻜
㻤㻜
㻥㻜
㻲㼕㼑㼘㼐㻩㻟㻢㻜㼤㻟㻢㻜㼇㼏㼙㼉
㻢㻜
㻠㻜
㻞㻜
㻜
㻝㻜㻜
㻜
㻝㻜
㻞㻜
㻲㼕㼑㼘㼐㻩㻡㻠㻜㼤㻡㻠㻜㼇㼏㼙㼉
㻢㻜
㻠㻜
㻞㻜
㻜
㻜
㻝㻜
㻞㻜
㻟㻜
㻠㻜
㻡㻜
㻢㻜
㻣㻜
㻤㻜
㻥㻜
㻜
㻟㻜
㻠㻜
㻡㻜
㻢㻜
㻣㻜
㻤㻜
㻥㻜
㻝㻜
㻞㻜
㻜
㻟㻜
㻠㻜
㻡㻜
㻢㻜
㻣㻜
㻤㻜
㻥㻜
㻝㻜
㻞㻜
㻜
㻟㻜
㻠㻜
㻡㻜
㻢㻜
㻣㻜
㻼㼔㼑㼞㼛㼙㼛㼚㼑㻌㼏㼛㼚㼏㼑㼚㼠㼞㼍㼠㼕㼛㼚㻌㼇㻑㼉
㻸㼍㼥㼕㼚㼓㻌㼐㼛㼣㼚 㻾㼑㼕㼚㼒㼛㼞㼏㼕㼚㼓
㻣㻜
㻤㻜
㻥㻜
㻝㻜㻜
㻟㻜
㻠㻜
㻡㻜
㻢㻜
㻣㻜
㻤㻜
㻥㻜
㻝㻜㻜
㻤㻜
㻥㻜
㻝㻜㻜
㻤㻜
㻥㻜
㻝㻜㻜
㻲㼕㼑㼘㼐㻩㻝㻠㻠㻜㼤㻝㻠㻠㻜㼇㼏㼙㼉
㻢㻜
㻠㻜
㻞㻜
㻜
㻜
㻺㼡㼙㼎㼑㼞㻌㼛㼒㻌㼠㼕㼙㼑㼟
㻺㼡㼙㼎㼑㼞㻌㼛㼒㻌㼠㼕㼙㼑㼟
㻞㻜
㻞㻜
㻢㻜
㻝㻜
㻞㻜
㻟㻜
㻠㻜
㻡㻜
㻢㻜
㻣㻜
㻼㼔㼑㼞㼛㼙㼛㼚㼑㻌㼏㼛㼚㼏㼑㼚㼠㼞㼍㼠㼕㼛㼚㻌㼇㻑㼉
㻸㼍㼥㼕㼚㼓㻌㼐㼛㼣㼚 㻾㼑㼕㼚㼒㼛㼞㼏㼕㼚㼓
㻠㻜
㻝㻜
㻡㻜
㻜
㻝㻜㻜
㻲㼕㼑㼘㼐㻩㻝㻢㻞㻜㼤㻝㻢㻞㻜㼇㼏㼙㼉
㻜
㻠㻜
㻞㻜
㻼㼔㼑㼞㼛㼙㼛㼚㼑㻌㼏㼛㼚㼏㼑㼚㼠㼞㼍㼠㼕㼛㼚㻌㼇㻑㼉
㻸㼍㼥㼕㼚㼓㻌㼐㼛㼣㼚 㻾㼑㼕㼚㼒㼛㼞㼏㼕㼚㼓
㻢㻜
㻟㻜
㻠㻜
㻜
㻺㼡㼙㼎㼑㼞㻌㼛㼒㻌㼠㼕㼙㼑㼟
㻺㼡㼙㼎㼑㼞㻌㼛㼒㻌㼠㼕㼙㼑㼟
㻞㻜
㻞㻜
㻝㻜㻜
㻼㼔㼑㼞㼛㼙㼛㼚㼑㻌㼏㼛㼚㼏㼑㼚㼠㼞㼍㼠㼕㼛㼚㻌㼇㻑㼉
㻸㼍㼥㼕㼚㼓㻌㼐㼛㼣㼚 㻾㼑㼕㼚㼒㼛㼞㼏㼕㼚㼓
㻠㻜
㻝㻜
㻥㻜
㻲㼕㼑㼘㼐㻩㻝㻜㻤㻜㼤㻝㻜㻤㻜㼇㼏㼙㼉
㻢㻜
㻝㻜㻜
㻲㼕㼑㼘㼐㻩㻝㻞㻢㻜㼤㻝㻞㻢㻜㼇㼏㼙㼉
㻜
㻤㻜
㻜
㻼㼔㼑㼞㼛㼙㼛㼚㼑㻌㼏㼛㼚㼏㼑㼚㼠㼞㼍㼠㼕㼛㼚㻌㼇㻑㼉
㻸㼍㼥㼕㼚㼓㻌㼐㼛㼣㼚 㻾㼑㼕㼚㼒㼛㼞㼏㼕㼚㼓
㻢㻜
㻣㻜
㻞㻜
㻜
㻺㼡㼙㼎㼑㼞㻌㼛㼒㻌㼠㼕㼙㼑㼟
㻺㼡㼙㼎㼑㼞㻌㼛㼒㻌㼠㼕㼙㼑㼟
㻞㻜
㻞㻜
㻢㻜
㻼㼔㼑㼞㼛㼙㼛㼚㼑㻌㼏㼛㼚㼏㼑㼚㼠㼞㼍㼠㼕㼛㼚㻌㼇㻑㼉
㻸㼍㼥㼕㼚㼓㻌㼐㼛㼣㼚 㻾㼑㼕㼚㼒㼛㼞㼏㼕㼚㼓
㻠㻜
㻝㻜
㻡㻜
㻠㻜
㻝㻜㻜
㻲㼕㼑㼘㼐㻩㻥㻜㻜㼤㻥㻜㻜㼇㼏㼙㼉
㻜
㻠㻜
㻲㼕㼑㼘㼐㻩㻣㻞㻜㼤㻣㻞㻜㼇㼏㼙㼉
㻢㻜
㻼㼔㼑㼞㼛㼙㼛㼚㼑㻌㼏㼛㼚㼏㼑㼚㼠㼞㼍㼠㼕㼛㼚㻌㼇㻑㼉
㻸㼍㼥㼕㼚㼓㻌㼐㼛㼣㼚 㻾㼑㼕㼚㼒㼛㼞㼏㼕㼚㼓
㻢㻜
㻟㻜
㻼㼔㼑㼞㼛㼙㼛㼚㼑㻌㼏㼛㼚㼏㼑㼚㼠㼞㼍㼠㼕㼛㼚㻌㼇㻑㼉
㻸㼍㼥㼕㼚㼓㻌㼐㼛㼣㼚 㻾㼑㼕㼚㼒㼛㼞㼏㼕㼚㼓
㻺㼡㼙㼎㼑㼞㻌㼛㼒㻌㼠㼕㼙㼑㼟
㻺㼡㼙㼎㼑㼞㻌㼛㼒㻌㼠㼕㼙㼑㼟
㻼㼔㼑㼞㼛㼙㼛㼚㼑㻌㼏㼛㼚㼏㼑㼚㼠㼞㼍㼠㼕㼛㼚㻌㼇㻑㼉
㻸㼍㼥㼕㼚㼓㻌㼐㼛㼣㼚 㻾㼑㼕㼚㼒㼛㼞㼏㼕㼚㼓
㻤㻜
㻥㻜
㻝㻜㻜
㻲㼕㼑㼘㼐㻩㻝㻤㻜㻜㼤㻝㻤㻜㻜㼇㼏㼙㼉
㻢㻜
㻠㻜
㻞㻜
㻜
㻜
㻝㻜
㻞㻜
㻟㻜
㻠㻜
㻡㻜
㻢㻜
㻣㻜
㻼㼔㼑㼞㼛㼙㼛㼚㼑㻌㼏㼛㼚㼏㼑㼚㼠㼞㼍㼠㼕㼛㼚㻌㼇㻑㼉
㻸㼍㼥㼕㼚㼓㻌㼐㼛㼣㼚 㻾㼑㼕㼚㼒㼛㼞㼏㼕㼚㼓
9 ? ) ) ! % ! &0: ; ; ;
; ; ; ; ; ; <=
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
議論
本節の目的は以下の 点であった.
計算機シミュレーションを用いて,環境の個体密度を固定したときの集団の挙動を観測する.
計算結果に基づき,個体密度が固定されているときの普遍的な振る舞いを検討する.
この目的のため,各実験フィールドにおけるエージェントの個体密度を固定するために,個体
数は <= あたりに 体とし 4 % のように設定し,計算機シミュレーションによっ
て環境中の個体密度を固定したときの群れの振る舞いを検討した.計算機シミュレーションの結
果,活動環境サイズが極端に小さくない限り環境中の個体密度が一定であれば,群れは同程度の
パフォーマンスを示すことがわかった.この結果は,当然のように考えられるが説明が困難であ
る.個体密度が同一のため衝突頻度が同程度発生し,最終的なパフォーマンスが同程度になって
いるものと考えられる.個体密度を一定にすることで群れのパフォーマンスを維持できるメカニ
ズムの説明のためには,個体の衝突回数をカウントすることで説明が可能であると考える.この
振る舞いのメカニズムの解明にはより詳細なシミュレーションが必要になるだろう.
実際の蟻の研究でも同様の報告が在る.<=# に蟻の採餌面積と個体数の関係が表として
提示されている.9 に蟻の種別のコロニーサイズと採餌面積の関係を示す.縦軸は採餌を
行う面積を示し,横軸はコロニーの個体数を示す.プロットはそれぞれの蟻の種を示す.蟻の活
動エリアは気候などに影響され一定ではなく,個体数もコロニーによって異なるのでエラーバー
がある.
1000000
Effecvite
100000
ae
ra
gn
ig
rao
F
Moderate
10000
1000
Poor
100
Effecvite
10
Effecvite
Formica polyctena
F. truncorum
F. exsecta
Lasius niger
Camponotus sp.
Formica fusca
1
1
10
100
1000
10000
100000
1000000
10000000
Colony size
9 ? . # % @ 0 ! ! I$QJは動員を効果的に行っていることを示し,I10 Jが中程度であることを示し,
I*Jは動員が行われていないことを示す.9 に示すように,動員が行われているときの環
境中の個体密度はほぼ一定であることがわかる. の動員が中程度であり,
は動員が行われないと報告されている.この 種は,動員を有効に行っている種と比べると
広い環境に対して個体数が少ないと言うことができる.つまり,フェロモン・コミュニケーション
を行うには個体密度を一定に保つことが有効であると言える.
第 章 ロボット群におけるフェロモン・コミュニケーションの性質の解明
結論
冒頭で述べたように,本節の目的は 計算機シミュレーションを用いて環境の個体密度を固定
したときの集団の挙動を観測する. 計算結果に基づき個体密度が固定されているときの普遍的
な振る舞いを検討することであった.研究目的に従って,シミュレーション条件を 4 % の
ように設定した.9 に示すように,計算機シミュレーションの結果,活動環境サイズが極
端に小さくない限り環境中の個体密度が一定であれば群れは同程度のパフォーマンスを示すこと
がわかった.この結果は,蟻が集団採餌を行う上でも同じことが報告されている 9 .
第章
まとめ
本章では,これまでに得られた計算機シミュレーションと実機実験の結果をまとめ,フェロモ
ン・コミュニケーションの実現性と応用可能性について論じる.
議論
本論文では,ロボット群とフェロモン・コミュニケーションに関して論じてきた.ここで,フェ
ロモン・コミュニケーションが万能なコミュニケーション手法であると論じるつもりはない.本節
では,フェロモン・コミュニケーションの適用範囲について論じる.
フェロモン・コミュニケーションは, 節の 9 に示すように,
「環境に情報を残す」と
いう既存の通信技術とは異なる手法で他個体とコミュニケーションを図る.情報は,送信者から
受信者へと直接伝達されるわけではないので,通信の確実性は生物が行っている機械的コミュニ
ケーション,光学的コミュニケーションと比べて低い.また,工学的な手法である無線通信とは
比較にならないぐらいコミュニケーションの成功可能性は低い.このようなコミュニケーション
手法が蟻や白蟻などの社会性昆虫で用いられ,コミュニケーションが成立しているのは,社会性
昆虫が常に多数の個体が集まって群れているからである.フェロモン・コミュニケーションが有効
に働くと考えられる条件を以下に示す.
活動する空間に適切な数の個体が存在すること
フェロモンが適切な揮発時間であること
9 に示すように,活動環境内に適切な数の個体が存在しないと多くのフェロモン・コミュ
ニケーションは期待することができない.また,9 に示すように,活動環境のサイズを大
きくして環境内の個体密度を下げても多くのフェロモン・コミュニケーションは期待できない.こ
のことから,特定の空間内に活動する空間内に適切な数の個体が存在することはフェロモン・コ
ミュニケーションにとって必要不可欠な要素であることは明白である.環境中の個体密度を一定
に保つと群れのパフォーマンスは維持される結果が上述の推論を裏付ける 9 .
また,9 に示すように,フェロモンが高濃度のとき,つまり,フェロモン・トレイルの
持続時間が短い場合は敷設・強化回数が逆転する. 節では,フェロモンとしてエタノールを
用いていたため, K 以上の揮発性を得ることはできなかった.しかし,9 の傾向が示
すように,より揮発性の高い化学物質を用いたとき,フェロモン・トレイルは存在しないも同然
になり,K のフェロモンを用いた場合と同じ結果になることが予想できる.このように,フェロ
モン・コミュニケーションを行う上で,フェロモンが適切な揮発時間であることが重要であろう.
第 章 まとめ
本論文では,群れに探索タスクを与えていた.このタスクは群れは無限の餌を採餌しているの
と等価であり,完全に静的タスクであった.群れに餌が移動するなどの動的タスクを課したとき,
フェロモン濃度 揮発時間 の決定が重要になる.環境が動的な場合は,エージェント ロボット
がフェロモン・トレイルを追従してもトレイルの先に * が無いようなことが想定できる.この
場合,高濃度フェロモン 揮発時間が短い を用いてフェロモン・トレイルの存在時間を短くして
対応することができるだろう.しかし,4 % に示すように,フェロモン・コミュニケーショ
ンは情報の伝達速度が遅い.現実の環境変化に情報伝達が追いつかない状況が考えられる.これ
がフェロモン・コミュニケーションの限界点であると考える.
結論
本論文では,フェロモン・コミュニケーションを行うロボット群について論じてきた. 節
に示すように,フェロモン・コミュニケーションとは生体が行う機械的・光学的・化学的コミュニ
ケーション手法のなかでは,化学的コミュニケーションのカテゴリに属すコミュニケーション方
法である.そのコミュニケーションは,化学的・可塑的・間接的・局所的という特徴がある.化学
物質を情報媒体にしているため,環境に残された情報は時間経過と共に揮発し意味消失していく.
また,送信者は環境に情報を残し,受信者は環境から情報を得る.
次に,フェロモン・コミュニケーションの応用可能性について述べる.前述のように,フェロモ
ン・コミュニケーションは環境を介したコミュニケーション方法である.そのため,コミュニケー
ションするに当たって,情報を重ねることが可能である.つまり,環境の任意の箇所に添加され
たフェロモンにさらにフェロモンを添加するという行動である. 節に示すように,この行動を
行うと,環境中の任意の箇所のフェロモンが強化され,コミュニケーションを継続・増幅するこ
とができる.このような振る舞いは,白蟻の生態で発見され と呼ばれている.この振
る舞いを応用すると,鉱山開発や大規模工事,医療行為に適用することが可能であろう.
このように,広い応用可能性を有するフェロモン・コミュニケーションをロボティクスで実現す
るべく,本研究は進められた. 節に示すように,本論文において解明するべきフェロモン・コ
ミュニケーションにおける性質を以下の つとし,これらの諸問題に対して取り組んだ.
群れのパフォーマンスに対するエージェント数の拡張性に関する問題
群れのパフォーマンスに対する活動環境サイズの拡張性に関する問題
群れのパフォーマンスに対するフェロモンの濃度依存性に関する問題
群れの規模に対するロバストネス
群れのパフォーマンスに対するエージェント数の拡張性に関する問題の解明のため,活動環
境サイズを固定し,エージェント ロボット 数をパラメータとして与えて計算機シミュレーショ
ン・ロボット群実験を行った.計算機シミュレーション実験の結果,エージェント数の増加に伴っ
てフェロモン・コミュニケーションの回数が増加する現象が観測された 9 .また,この計
算機シミュレーションの結果から,少数 , 体程度 の個体数でもフェロモン・コミュニケーショ
ンが成立することを検証した.ロボット群実験の結果,計算機シミュレーション実験と同様に個
体数の増加に伴うフェロモン・コミュニケーション回数の増加が実証された 9 .これは,
活動環境内のエージェント ロボット 数がコミュニケーション回数に重要なパラメータであるこ
とを示唆する.
第 章 まとめ
群れのパフォーマンスに対する活動環境サイズの拡張性に関する問題の解明のため,エージェ
ント ロボット 数を固定し,活動環境サイズをパラメータとして与えて計算機シミュレーション・
ロボット群実験を行った.計算機シミュレーション実験の結果,活動環境サイズの増加に伴って
フェロモン・コミュニケーションの回数が減少することが観測された 9 .また,ロボット
群実験の結果,計算機シミュレーション実験と同様に活動環境サイズの減少に伴ってフェロモン・
コミュニケーションの回数が減る傾向が見られた 9 .これは,活動環境サイズ数がコミュ
ニケーション回数に重要なパラメータであることを示唆する. , の結果から,適切な活動環
境内の適切なエージェント密度がフェロモン・コミュニケーションに重要であることを意味する.
群れのパフォーマンスに対するフェロモンの濃度依存性に関する問題の解明のため,活動環
境サイズとロボット数を固定し,フェロモン エタノール 濃度をパラメータとして計算機シミュ
レーション実験とロボット群実験を行った.計算機シミュレーション実験では,フェロモン濃度を
, K の範囲でパラメータとして与えた.その結果,9 が示すように,フェロモン濃度が
K のときと比べてフェロモン濃度が , K のときに敷設 0・強化 ! 回
数が多い.これは,フェロモン・コミュニケーションを行って集団採餌を行う方がランダム・ウォー
クで餌を発見して採餌するよりも効果的であることを示す.また,フェロモン濃度を上げるにつれ
て敷設・強化回数が逆転する現象が見られる.この現象は,フェロモンの蒸発速度が原因になって
いる.蒸発速度が上がることによって,環境中にフェロモンが残り難くなり,フェロモン・トレイ
ルを敷設しても,フェロモンを用いていない状態とさほど変わらないことになってしまっている.
ロボット群実験では,フェロモン濃度を , K の範囲で K 毎にパラメータとして与えた.そ
の結果,計算機シミュレーション実験と同様の傾向が見られた 9 .
群れの規模に対するロバストネスの解明のため,活動環境サイズとロボット数を固定し,フェ
ロモン エタノール 濃度をパラメータとして計算機シミュレーション実験とロボット群実験を行っ
た.本実験では,環境中の個体密度を一定に保った状態で群れの規模を大きくすることで,規模の
大小で群れの振る舞いがどのように変化するのかを観測した.計算機シミュレーション実験の結
果,環境中の個体密度を保つと集団の振る舞いが保存されることを確認した 9 .この現
象は,実際の蟻でも発生している.9 に蟻の種別のコロニーサイズと採餌面積の関係を示
している.コロニーサイズと採餌面積には相関関係があり,採餌環境中の個体密度が保たれてい
ないとフェロモン・コミュニケーションを用いた集団採餌が発生しないことが報告されている.
第 章 まとめ
第章
今後の展開
本論文で行った研究は,群ロボットにおけるフェロモン・コミュニケーションに関する研究の一
部に過ぎない.群れは完全に同質な個体で構成され,環境は静的であることを前提条件にしてい
た.本章では,これまでに行った研究を俯瞰し,今後の課題や展望について述べる.
ロボット単体の最適設計
本論文では,群ロボットのフェロモン・コミュニケーションに焦点を当てて研究を進めた.その
ため,ロボット単体の行動の最適性は無視している.群行動アルゴリズムにはランダム・ウォー
ク がある.ランダム・ウォークでは,K の確率で直進を選択し, K の確率で左超信地旋
回を選択,同様に K の確率で左超信地旋回を選択する.また, K の確率で後進を選択する.
この確率は,実験的に試行錯誤の結果として導出したものであり,計算機シミュレーションに基
づいていない.個体のランダム・ウォークが集団の最終的なパフォーマンスに影響していること
は容易に想像できるため,今後は計算機シミュレーションを用いてランダム・ウォークの最適化
を行う必要があるだろう.
また,フェロモン・トレイル追従 も最適化できる余地がある.下山ら < = は,カイコガの
触覚を装着したロボットとニューラル・ネットワークを用いて匂い源の同定を行っている.アリ
のフェロモン・トレイル追従に関する生物学の研究は,その個体のサイズの小ささから神経レベ
ルでの研究としては進んでいない.そのため,生物学の知見を本研究に活かすことは困難である.
しかし,本研究で用いた知見を生物学分野に提案することで動物行動学者らの研究領域を活性化
させることが期待できる.
同質 な個体で構成される群れ
本論文では,ロボット群に採餌タスクを課していた.この系において,本論文で研究したこと
は一部であった.以下に静・動的な環境下での群れに対する研究要素を説明する.
静的な環境下での群れ
個体密度による群れの振る舞いに関する研究要素
節では,活動環境サイズを固定し,投入する個体数をパラメータとして操作した. 節で
は,個体数を固定し,活動環境サイズを操作するパラメータとして与えた.この つの検討課題
第 章 今後の展開
では,環境内の個体密度を変化させていた.そこで 節では,個体密度を固定し,活動環境サイ
ズと個体数を操作パラメータとして与えた.その結果,個体密度が同じ群れならば,同様の結果
が得られることがわかった.本論文で扱った課題は,この領域に入る.
フェロモンに関する研究要素
本システムでは,コミュニケーション媒体としてフェロモンを用いている.実世界で化学物質
を環境に散布したとき,温度・湿度,散布面の表面荒さなどによって揮発時間は変化する.そこ
で, 節では,フェロモンの揮発時間が群れに与える影響について検討した.この検討によって,
揮発時間の変化によって単純なアルゴリズムで行動する群れが単体採餌から集団採餌へと採餌戦
略をシフトする様子が観測できた.この知見は,単体・集団採餌のどちらが適しているかを選択
したとき,フェロモンの揮発時間を変えることで採餌戦略を変化させられることを示し,ロボッ
ト群の運用に重要な知見となった.
環境に関する研究要素
本論文では,活動環境中には ・* がそれぞれ つずつ存在するのみであった.しかし,
実世界でのタスクを考慮すると * が複数あることを考慮するのが望ましい.複数 * の収集
に対して群ロボット系を用いるため,計算機シミュレーション・実機実験で検討する必要がある.
また, が複数存在する場合も考慮する必要があろう.多数のロボットを運用するには,複
数の (補給・メンテナンスステーション)があれば,より円滑な運用が期待できる.この課
題に対しても計算機シミュレーション・実機実験を通して検討する必要がある.
内的な外乱に対するロバストネス
ロボット群を運用するとき,全個体が正常に機能するとは考え難い.何体かは,異常動作をし
てしまうことが考え得る.例えば,センサ・エラーによって群れの何割かが異常動作をするとき,
群れが機能するのか検討する必要がある.具体的には, センサ,フェロモン・センサ,接触
センサなどに任意の確率で誤情報を与えて内部状態を遷移させる.このときに,どの程度の内的
な外乱を許容可能であるのかを検討する.
動的な環境下での群れ
個体に対するアプローチ
動的な環境下では,個体に対してなんらかの障害(故障,損傷)を受けることが考えられる.こ
のような環境下でも群れの機能を損ねることなく活動を続けることが望ましい.そのため,活動
中に個体数を操作して振る舞いを観測することによって動的環境下での群れの振る舞いを検討す
ることは有意であろう.
第 章 今後の展開
環境変化に対するアプローチ
本論文では,*, はどちらも固定されていることを前提条件としていた.しかし,実世
界でのタスクでは環境変化により運搬対象物体が動く(坂を転がるなど)場合がある.このよう
な変化にも対応してタスクを解決することが求められる.前述の状況と同じように,(物体
の運搬先)が移動することも考えられる.このときにも自律的に集団が判断を下し,タスクを解
決することが求められるだろう.
フェロモンの揮発時間の自律的調整
静的な環境下では,フェロモンは揮発しない方が良い.・* の位置が固定され * が
無限な場合,フェロモン・トレイルは消失しない方が群れのパフォーマンスが良いシミュレーショ
ン結果からも明白である.しかし,動的な環境下ではフェロモンの持続時間は環境の動的さによっ
て調整が行われた方が良い.* が運搬された後に,*・ 間にフェロモン・トレイルが残
り続けるということは,個体にとっては誤情報になる.なぜならば,フェロモン・トレイルを追
従してもトレイルの先に * が存在しないからだ.このことから,フェロモンの揮発時間を集団
的に決定するメカニズムの導入が求められる.
複数のフェロモンの利用
現在,本論文で扱っているロボット系において,フェロモンを誘引のみに用いている.そのた
め,環境中に存在する情報は一種類だけである.この環境中の情報を増やすことによって,効率
的なロボット群の運用が可能になると考えられる.ロボットが外部から与えられた障害によって
損傷した場合,その位置に忌避フェロモンを散布することによって,同じ障害を加えられる可能
性を減じることができるだろう.実際に,社会性昆虫でも警報フェロモンや忌避フェロモンの存
在が確認されており,群れを危機的な状況から回避させていることがわかっている.
異質 な個体で構成される群れ
異質な個体で構成される群れを制御することは非常に困難な課題である.蟻・白蟻などの真社
会性昆虫は,正にこの異質な個体で構成される群れである <=.ワーカー・大型ワーカー・女王な
どで構成され,それぞれが異なる機能を有していながらも全体としては一個の個体(超個体)の
ように振る舞うことが知られている.動物行動学分野では,ワーカー・大型ワーカー・女王などの
区分はカーストと呼ばれ明確にその役割が区別されている.真社会性昆虫の群れ(社会)は,こ
のカースト制度を持ちながら高度な社会性を獲得している.
このような,群れを設計するためにマルチ・エージェントシステム分野では研究が行われてい
るが明確な手法は確立されているとは言い難い.本論文 節において,個体の集団が群れなす
条件として以下の 点を指摘した.
同一のセンサ構成
同一のアクチュエータ
コミュニケーション・プロトコルの共有
第 章 今後の展開
実際の蟻・白蟻の群れでは,これらが共有されていないことがしばしばある.ワーカ・大型ワー
カでは触角長が異なることが知られているし,そもそも大きさが異なることから同一のアクチュ
エータを有しているとは言い難い. コミュニケーション・プロトコルの共有に関しては,動物
行動学分野の研究を待つ以外にない.以上のことから,実際の生物が前述の つの条件を満たし
ていることはかなり疑わしい.それにもかかわらず,群れているのは研究課題として非常に興味
深い現象であろう.
モデル内にセンサ感度の差をもうけたシミュレーション研究が西森 <= を中心として行われて
いる.西森は,蟻のコロニー内にフェロモンに対して敏感な感受性を持つ蟻と鈍感な感受性を持
つ蟻をモデル化し,その振る舞いをシミュレーションしており,動物行動学者への理学・工学分野
からの知見として注目されている.
参考文献
< = 松香光夫; 大野正男; 北野日出男; 後閑暢夫; 松本忠夫 昆虫の生物学 玉川大学出版部; <= T "
) ; <= * D 0 5) 0 * ; + ; ## S
; <= エドワード・3・ウィルソン 社会生物学 新思索社; <= 鹿取廣人; 斎賀久敬; 篠原彰一; 河内十郎; 鳥居修晃; 下條信輔; 杉本敏夫; 金城辰夫; 丹野義彦;
安藤清志; 末永俊郎 心理学 東京大学出版会; 第 版; <= 1 -; 6- ( ; 0 /1 6 % 0 ! 0 #@ ; + ; ; ## S ; <= 1 - 0 4 H
)@
!"
5 0!0 5"; <
= D ) ; 4 D @ ; 0 4 F % 9 % ! %
) # 2 #
$%& $ $ '
($!)**+,; + ; ## S; <= D ; D ) ; 4 D @ ; 00; 0 - (0) 10
! !,0 # ? 9 0 #0 #
; + ; ## S ;
< = 下山勲; 神崎亮平 生物型マイクロマシン バイオメカニズム学会誌; + ; ; ##
S ; <
= A *) 0C C 0 . .) 6)0 %8 % ) # ,
) ; + ; ; ## S ; < = ( . D)% 0 $ 5 % ) (# # % 0 %
; + ; ,; ## S ; < = . 6E; $ 4); 1 -; 1 5 ; 0 9 10 0 3%C # % 0,
) % !, % 2 #
$ $ ($)**-,; ## S; < = 安藤繁; 田村陽介; 戸辺義人; 南正輝(編) センサネットワーク技術 東京電機大学出版局;
第 版; 参考文献
< = 1 ." 0 5" 1),% ># )0 ! ,
" #
; + ; ; ## S; < = 杉崎隆二; 鈴木剛; 川端邦明; 羽田靖史; 戸辺義人 被災地情報収集を目的とした移動ロボット
による無線センサネットワークの構築と管理 # 6; < = 5 ,5) ; 5 "; 1 ; 0 *(A ( 9 0 .%) 6 20&,
B 2 0 6 4 0 6 ) 1>) 10
$ .! &! . ; + ; ; ## S ; < = 佐藤徳孝; 松野文俊 遠隔操作型ロボットによる簡易な行動地図の作成 # ; < = 勝又綾子; 尾崎まみこ アリのケミカルコミュニケーション 比較生理生化学; + ; ;
## S ; <= 1 -; $ 5 % ); 0 6 4 ) @ 0 0./$!. !1# / 2/1; + ; ; ## S
; / < = 太田順; 新井民夫 群知能ロボットシステム 日本ロボット学会誌; + ; ; ## S;
<= T "% B>"H
) !@H
) 0) 0 ) )0 T # 0 #)%0 ; <= 車谷浩一 蟻コロニーにおける協調採餌行動のマクロモデル ,単純モデルにおけるシミュ
レーションとモデル生成 人工知能学会誌; + ; ; ## S
; <= 中道義之; 有田隆也 フェロモン・コミュニケーションの起源に関する進化シミュレーション
数理モデル化と問題解決シンポジウム論文集; 第 巻; ## S
社団法人情報処理学会;
<= F A #@& )0 ") 0 #)# ) !)) )0 ) 0 % 0)!!0 3
4
#;
+ ; ## S ; <= /$ ( A A 0 -T A T # 5 !)" ; 0; <= .* $0; $- 1 ; 0 1( ( ,,;,0,# @; # ! 0 ! # ! 1
$
5
;
+ ; ## S; <
= + ( %); / (G; T,/ -)%); 0 ( - 0 ! # & 5; + ; ## S; <= 5 0 $- 1 4 # ! /
.
; + ; ## S; 参考文献
<= T 5; F 5" ; 0 $- 1 # #)0 0 ! 6 6 # ; !0 7 ; + ; ## S; H
< = $ T ; $ B%;
/ 5 ); 9 D; AT 5 ; 5 ; ),
D ; 0 B 1 @ 4 # ! # 8 # ? 90 ? )# >) ! 0 #)0 .'
; + ; ## S ; <= . 9)C ; - D)% ; A 2 ) ; 4 A ; 0 9 1 ) -#0 % ,
! # ! )# % 2 #
6 $ !" $
; <= $3 F / $
4 5" # * ! A 0 B * ( ,
%0; 1 ); <= $3 F ( ) " ! & ! 5; + ; ,; ## S ; <= 5 AH
0% 0 $3 F /
( %0; 1 ); '
4 5" # * ! A 0 B *
<= T 5 0 $- 1 * ) ? ) 0
2 D$ $# .D + 0 1; 1- 50 0 1/ F; 0;
# $
; ## S F *; <= 中川寛之 環境変化下での蟻集団のトレイル戦略評価 数理解析研究所講究録; + ; ##
S ; 謝 辞
本研究を進めるにあたり丁寧なご指導と多大なご助言をいただいた電気通信大学知能機械工学
専攻 松野文俊教授,多くのご助言をいただいた長谷川晶一准教授に心から感謝致します.ま
た,他分野の立場から多くの討論をしていただいた東京大学・広域システム科学系 土畑重人
氏に感謝致します.研究する上で様々な刺激を与えてくれた佐藤徳孝氏,根和幸氏,田中基康
氏に感謝致します.また,報告会などで貴重なコメントをいただけた研究室の仲間に感謝致し
ます.特に,群ロボ班として共に研究を行った今村光氏,久保田大輔氏,清水裕亮氏がいなけ
れば私の研究は進んでいなかったでしょう.
最後に,長い学生生活を許容してくれた家族に感謝します.
付録 実験による蒸発係数の導出
計算機シミュレーションにフェロモン濃度をパラメータとして与えるため,実験により蒸発係
数を導出する.
フェロモンの時間経過と重量
各濃度の蒸発係数を測定するために,エタノール ( A 3A・水 A 3 の混合液 フェロモン
を用意する.用意したフェロモンは , ,,,,,,,
,, K である.各
濃度のフェロモンを電子秤に 乗せて重量を <= 毎に計測した.実験時の室温は ℃であ
り,湿度は K であった.各濃度の計測結果を 9 に示す.横軸は時間を示し,縦軸は重量
を示す.
10
0%
10%
Mass [mg]
8
20%
30%
6
40%
50%
60%
4
70%
80%
2
90%
100%
0
0
100
200
300
Time [s]
400
500
600
9 ? $># ) ! # # 9 に示すように,フェロモンは時間経過と共に蒸発し,その重量を減じている.この結果
を基に,各濃度における蒸発係数を導出する.
蒸発係数の導出
フェロモンの重量は, <= 毎に <= 計測された.フェロモンの蒸発係数の導出のため, <=
毎に <= 前の重量と現在の重量を式 $R に基づき比較する.
参考文献
: は現在のフェロモンの重量を意味し, は <= 前のフェロモンの重量を意味す
る.つまり,各濃度のフェロモンは # 前の重量に を掛けた重量となっている. <= 毎に
<= 計測したデータの平均を 4 % に示し,4 % のグラフを 9 に示す .
4 % ? * 0 # Æ
* ! K
K
K
K
K
K
K
K
K
K
K
Evaporation coefficient
1
0.99
0.98
0.97
y = -0.0443x2 + 0.0039x + 0.993
0.96
0.95
0%
20%
40%
60%
Ethanol concentration
80%
100%
9 ? * 0 # Æ
9 が示すように,フェロモン濃度を変えたときの蒸発係数は以下の式で近似可能である
ことがわかった.
: M M は蒸発係数を示し, はフェロモン濃度を示す.
のグラフを作成するに当たって のデータを除外した.
関連論文の印刷公表及び時期
&4'
&-'
&('
全著者名:5 67
!
論文題目:/ 0 * 8 1 印刷公表の方法及び時期:9 0 : 5
; 4(
<
年(月
&第 - 章と関連'
全著者名:藤澤隆介
今村光
橋本敬
松野文俊
論文題目:フェロモン場を用いて誘引を行うロボット群の開発
印刷公表の方法及び時期:情報処理学会誌
数理モデル化と応用(2>)
-
-..= 年
&第 % 章と関連'
全著者名:5
-
-..=
; -
<
67
! !
6 >?
論文題目:1 8 @ 6 > 5
印刷公表の方法及び時期:@ AAAB5*9 -..C 5 *
-..C 年 = 月
&第 % 章と関連'
&%'
全著者名:5
1
67
! !
6 >?
論文題目:* >?5 8 @ 印刷公表の方法及び時期:@ - * >
-..D 年 D 月
&第 % 章と関連'
&E'
全著者名:5
67
* /
/ F
!
6 >
論文題目:/ 1 @ > 5
印刷公表の方法及び次期:@ * 1 0 1
2
-..C 年 = 月
&第 E 章と関連'
参考論文の印刷公表及び時期
参考論文なし
著者略歴
藤澤 隆介 (ふじさわ りゅうすけ)
年 ( 月 4E 日
年(月
-..% 年 % 月
-..G 年 ( 月
-..G 年 % 月
茨城県に生まれる
電気通信大学 電気通信学部 知能機械工学科卒業
北陸先端科学技術大学院大学 知識科学研究科 博士前期課程入学
北陸先端科学技術大学院大学 知識科学研究科 博士前期課程修了
電気通信大学大学院 電気通信学研究科 知能機械工学専攻 博士後
期課程入学
-..= 年 % 月
電気通信大学大学院 電気通信学研究科 知能機械工学専攻 博士後
期課程修了予定
情報処理学会学生会員, AAA 学生会員.
4=C.
-..%
© Copyright 2026 Paperzz