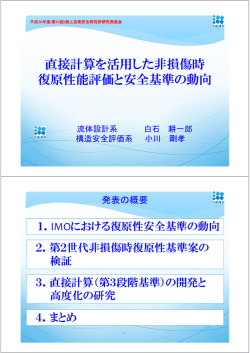
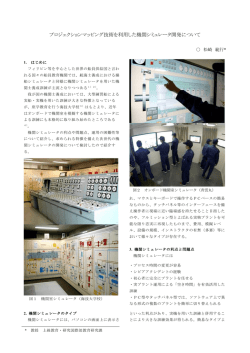
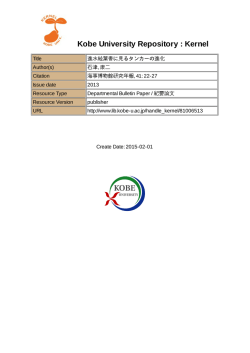
第130回講演会(2014年5月22日,23日) 日本航海学会講演予稿集 2巻1号 2014年4月22日 操船シミュレータにおける操縦性悪化船の作成 学生会員 ○城戸 裕晶(大島商船高等専門学校) 正会員 岩崎 寛希(大島商船高等専門学校) 要旨 「操船」に関する教科書には「操縦性の悪い船」「スパイラル試験での不安定ループ幅」などの項目が出て くる。学校の保有すべき教材として「操縦性の悪い船」の操船体験ができる環境が必要ではないかと考える。 本研究では、本校に導入されているビジュアル型操船シミュレータに内含されている供試船の内、VLCC を対 象にして、更なる操縦性を悪化した船体運動モデルを作成することを目的とする。そして、操船シミュレー タ内の船体運動モデルを今回の悪化船の運動をするように制御することで、操船者が悪化した操縦性の船を 体験できるようなシステムをつくる。 キーワード:操船、操船シミュレータ、操縦性能 1. はじめに 2. 研究の手順 研究方法として、次の手順で行った。 本校に平成 22 年より導入されたビジュアル型操 ① 船シミュレータには、供試船として VLCC から内航 操船シミュレータの構成と、それに内含され ている VLCC モデルについて調査した。 貨物船など計 11 種類の船種が用意されており、今 ② 日までに商船学科学生の操船訓練用として使用さ 本研究の目的の一つである、操縦性悪化船を 作りだすための、パソコンでファーストタイム れてきた。 シミュレーションが行える船体運動モデル(以 供試船の操縦性能は船種によって様々であるが、 現状ではその船種に対してそれぞれ 1 隻の操縦性 下、パソコン版ファーストシミュレーションと 能のみしか操船体験ができない。すなわち、同じ船 記す)を作成した。 ③ 種で、操縦性能が良い船と操縦性能が悪い船の両方 このシミュレータ内含 VLCC モデルをもとに、 を体験することや、また徐々に操縦性能が悪くなっ ほぼ似た動きをするパソコン版ファーストシ た船を体験することなどはできない。 ミュレーションモデルを同定する方法につい ても吟味した。 「操船」に関する教科書には「操縦性の悪い船」 同定された VLCC モデルの操縦性を、3 段階に悪化 「スパイラル試験での不安定ループ幅」などの項目 させる方法について、以下に記述する。 が出てくる。また「IMO の操縦性基準の内容」につ いても記載されている。これらからしても、学校の 本研究には、シミュレータに内含されている VLCC 保有すべき教材として「操縦性の悪い船」の操船体 モデルと、同じ動きをするファーストシミュレーシ 験ができる環境が必要であると考える。 ョン用のパソコン運動モデルが必要となる。その理 由としては、 本研究では供試船の中で元々操縦性能の悪いと ① されている VLCC を例にとって、その VLCC を手本に シミュレータではスパイラル試験や逆スパ して更なる操縦性を悪化した船体運動モデルを作 イラル試験等を行うにあたり、実船と同様に時 成することを目的とする。 間がかかり、作業の進捗に影響をきたす。 ② また、操船シミュレータのパネルには、アナ ログ角速度計しかなく、精度を保った上での、 逆スパイラル試験等が行えない。 ③ 操縦性悪化船モデルの同定のためにも、繰り 返しシミュレーションする必要がある。 などの理由からである。以下、パソコン版ファース トシミュレーション用の運動モデルを作成する手順 図 1 ビジュアル型操船シミュレ を記す。 ータのイメージ ① 22 供試船 VLCC の操船シミュレータによる旋回試 第130回講演会(2014年5月22日,23日) 日本航海学会講演予稿集 2巻1号 2014年4月22日 ② ③ ④ 験、Z 試験の実施 デルマシン(左側)、悪化船追従マシン(右側) から構 供試船と Cb の近い同型船の流体力微係数デー 成されている。まず、特設舵輪はゲーム用のハンド タを用意 ルタイプのジョイスティックとそのジョイスティッ 同型船の流力微係数のチューニングと供試船 クの動きを検知するパソコンを組み合わせ作成した。 への同定 特設舵輪の舵角が生じると、悪化船の動きが計算さ ファーストシミュレーションを用いたスパイ れる。その動きを擬似化追従マシンへ LAN 通信で伝 ラル試験、逆スパイラル試験の実施し、操縦性 える。同追従マシンでは、悪化船の動きになるよう 悪化の具合の調査 その針路を制御する。 なお、今回は、悪化船モデルには同定した悪化船 3. 研究成果 運動モデルを組み込み、悪化船追従モデルには舵に 2.で述べた方法により、シミュレータに内含され 対する応答の速いコンテナ船モデルを組み込んだ。 ている VLCC モデルのパソコンへの移植ができ、パソ そうしたのは、もともとの VLCC を同追従モデルに入 コン上にて同じ動きをするファーストシミュレーシ れると、制御舵に対する応答が遅く、うまくいかな ョンが可能となった。可能となったことで、ファー かったからである。 ストシミュレーションを用いてスパイラル試験、逆 スパイラル試験がパソコン上にて短時間で実施でき るようになった。 ここで船体・機関・プロペラはそのままで操縦性を 悪化した船体運動モデルを作る。その方法は、舵高 さを変えずに、舵面積を縮小することとした。そし て、ファーストシミュレーションを用いてスパイラ ル試験のδ-r 曲線の傾き(舵に対する旋回力の大き さを表す)を悪くする(すなわち小さくする)ように して、操縦性を悪化した船体運動モデルを作成した。 図 3 システム構成図 次に、図 4 に擬似化追従性マシンの入出力関係 のブロック図を用いて、システムを説明する。特設 舵輪の舵角に応じた悪化船の運動諸元を演算し、針 路Po、角速度ro、速力uoを得る。また、悪化船追従 マシン内の船の現針路Pn、現角速度rn、現速力un が計算されている。悪化船の動きに、追従船の動き を合わせるため、PD制御的に舵角δ*を演算する。 悪化船モデルマシン内では、両船の針路差(Pn-Po) と、追従船の旋回角速度rnに応じて、このδ*は決 定される。 図 2 徐々に旋回力を悪化させた VLCC モデルのスパ イラル試験結果 4. 操縦性を悪化したモデルの操縦体験シ ステムの構築 操縦性を悪化したモデルの操縦体験システムの 構築を行うにあたり、その構成を図 3 を使って説明 する。このシステムは、特設舵輪(手前)、悪化船モ 23 第130回講演会(2014年5月22日,23日) 日本航海学会講演予稿集 2巻1号 2014年4月22日 図 4 擬似化制御モデル 操縦性擬似化システムの実証実験を行った。実験 の結果を図 5 ~図 7 に示す。 図 5 は、悪化船の動きに悪化船追従マシンの船の 動きを合わせた旋回試験の航跡結果である。図でわ 図 6 パソコン上における実証実験の Z 試験航跡 かる通り、航跡は完全には、一致しなかった。また 図 6 に示す通り、Z 試験の航跡結果も完全には一致 次に、この図 6 の+10°Z 試験の結果を P-δ(針 しなかった。 路-舵角) タイムヒストリーで見てみる。図 7. を参 図 5 を見ると、悪化船が先行しているが、追従船 照して欲しい。実線が悪化船のもので、破線が追従 の方は、追いついていない。悪化船は舵面積が小さ 船の動きである。操船者は悪化船に+10°Z 試験を いため、旋回性は悪くなっているが、操舵しても船 実施するべく、±10°舵を針路に応じて、きりかえ 速が落ちない。一方、追従船は悪化船の針路変化に している。それに対し、追従船の方は、悪化船の舵 追従しようと、頻繁に舵を取ることで、6~7 割に船 に対する針路の変化に追従すべく、±3~5°で対応 速が落ちてしまう。これらのことから、追従船は、 している。針路変化を見ると、悪化船の舵に対する 悪化船が通っていった航跡をたどりはするが、時間 針路の応答を、追従船は忠実にたどっていることが 的には遅れてしまうものと考える。図 6 の+10°Z わかる。 試験の航跡についても、第一カーブから第二カーブ 舵角に対する針路の応答が、合ってくると、その までは航跡はあっているが、少しずつ悪化船の方が ことを知らない操船者は、本システムが間接的に操 先行し、追従船は後を追っている形である。 しかし、 縦している追従船を「悪化船」と思い込んで、「悪化 第三カーブあたりから、船速の違いが起因して、旋 船をちゃんと乗りこなした」と認識したと思うであ 回性にも差が出てきている。 ろう。しかし、前出したように船速の追従が不全で あるので、航跡については追従船が後追いしてしま うのである。 図 5 パソコン上における実証実験の旋回試験航跡 図 7 パソコン上における実証実験の Z 試験結果 (P-δ曲線) 24 第130回講演会(2014年5月22日,23日) 日本航海学会講演予稿集 2巻1号 2014年4月22日 5. まとめ ① ⑧ 本レポートでは、供試船の中で操縦性能が は悪化船追従モデルの動きを悪化船と思い込 元々悪いとされる VLCC を対象船として、VLCC み、悪化船を操縦体験する。その実証実験とし の更なる操縦性を悪化した船体運動モデルを て旋回試験、+10°Z 試験を行った。その結果、 作成した。そして、操船シミュレータ内の VLCC 本来の悪化船の航跡と、その動きになぞる追従 モデルを今回の悪化船の運動をするように制 船モデルの航跡を比較した。 ⑨ 御することで、操船者が悪化船の操縦性能を体 ② 角) 曲線のタイムヒストリーで見ると、悪化船 はパソコン 2 台による操縦体験システムを試験 の舵に対する針路の応答を、追従船は忠実にな 的につくった。 ぞった。しかし、船速の追従が不全であること が起因して、航跡については追従船が後追いし 本校に導入されているビジュアル型操船シ てしまった。 ⑩ の旋回試験及び Z 試験を実施した。その結果、 ④ 同じく+10°Z 試験の結果を P-δ(針路-舵 得できるようなシステムをつくるために、まず ミュレータ内の操縦性能の悪いとされる VLCC ③ マシン 2 台を連動して動かすことで、操船者 今回は、追従船のモデルを舵の応答の良いコ IMO の操縦性基準は満たしていることが分かっ ンテナ船モデルをパソコンに入れ、悪化船の動 た。 きになるように制御した。今後の課題としては、 次に、この VLCC モデルを加工して、VLCC 操 パソコンシステムにて悪化船の動きを追従船 縦性悪化モデルを作成した。そのために、この になぞらせることが可能であることが確認で VLCC と同じ動きをするファーストシミュレー きたので、次は悪化船の動きを本校にあるビジ ション用のパソコン運動モデルを同定して動 ュアル型操船シミュレータ内の供試船を制御 かせるようにした。 して悪化船の動きを体験できるかを確認した い。 ファーストシミュレーションにて、スパイラ ル試験、逆スパイラル試験を行い、操船シミュ レーション用の VLCC モデル、並びに悪化船モ 参考文献 デルの操縦性を確認した。 ⑤ ⑥ VLCC モデルの操縦性を悪化した船体運動モ (1) 岩崎寛希:初心者のための操船シミュレータを デルの作成方法は、舵面積を縮小することでス 用いた大型船操船訓練に関する研究 ,神戸商 パイラル試験の δ-r 曲線の傾きを悪くするよ 船大学学位論文,2003. うにして操縦性を悪化した船体運動モデルを (2) 日本造船学会:第 3 回操縦性シンポジウム, 1981. 作成した。作成するにあたり、旋回力指数 K’ (3) Kijima, k., Katsuno, T., Nakiri, Y., and を 20%、30%と減少させた場合、それぞれ舵面積 Fukukawa, y.:On the Maneuvering Performance が 48%、58%と減少すれば、操縦性能を悪化する of a Ship with the parameter of loading ことが判明した。 condition,日本造船学会論文集,第 168 号, 1990. 悪化船モデルをパソコンに組み込み、ゲーム 用のハンドルタイプのジョイスティックを特 (4) 芳村康男:浅水域の操縦運動数学モデルの検討 製舵輪として繋いで、リアルタイムシミュレー -MMG モデルの浅水域への適用について-,関西 ションで動く悪化船マシンを構築した。なお、 造船協会誌,第 200 号,1986. (5) 日本造船学会:操縦性研究の設計への応用,運 この悪化船マシン画面には舵角、テレグラフ・ 動性能研究委員会,第 12 回シンポジウム,pp91, オーダしか表示されていない。 ⑦ 1995. 一方、他マシンには、操縦性の良いコンテナ 船モデルを組み込み、悪化船システムから LAN (6) 小瀬邦治,佐伯敏郎: 運動操縦の新しい数学モ 経由で情報が入出力されるような悪化船の旋 デルについて,日本造船学会論文集, 第 146 号, 回運動を忠実になぞる追従性マシンを構築し 1979. た。なお、この追従性マシンには、鳥瞰的に悪 化船に疑似化したコンテナ船の動きを描いた。 25
© Copyright 2026 Paperzz