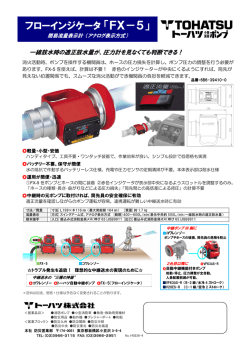
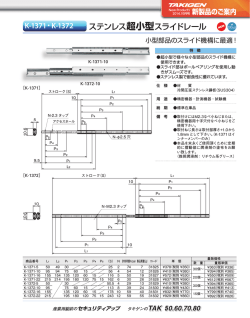
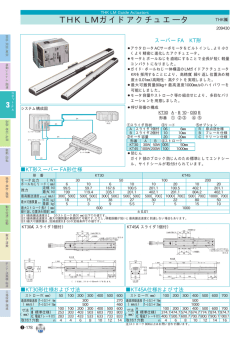
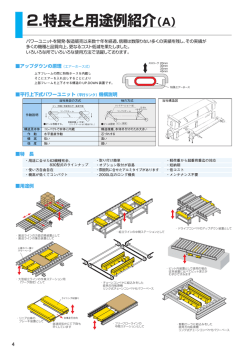
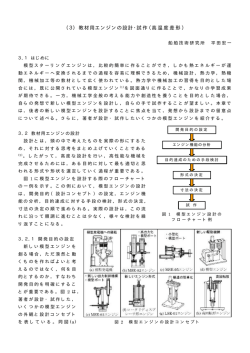
バランスシリンダシリーズ シンテック なめらかな、重量物の昇降作業を可能にしたフルオート・エアバランサ エアバランサは人が重量物を楽に昇降させることのできる補助装置です。 概 シリンダタイプ 自動重量設定 PASCA 手動重量設定 PASCM ドラムタイプ 自動重量設定 ABCP 要 直接ワークを持って軽く昇降することができるバランサです。 非常に滑らかに動作するため、昇降中にワークがノッキングすること はありません。 床等に静粛に据える作業、また微妙な位置合わせ など、組み付け作業や移動作業に幅広く使用できます。 ワークを持ってそっと組み付ける! ワークを持ってそっと下ろす! に最適なバランサです エア配管が切断し エア配管1本 で OK! てもワークは落下 しない 脈動のない、スム ーズな動作 グリップスイッチを自由な位 400Nのワークに対し、約 置に取り付け、これひとつで 20Nの操作力 作業可 ワークを直接持っ て作業可 仕様/形式 タイプ 重量設定方式 シリンダタイプ 【タテ型】 手動設定 自動設定 シリンダタイプ 【ヨコ型】 手動設定 自動設定 シリンダタイプ 【オフセット型】 手動設定 自動設定 ドラムタイプ 自動設定 型 式 PASC□-32V-****-*-** PASC□-50V-****-*-** PASC□-80V-****-*-** PASC□-40H-****-*-** PASC□-63H-****-*-** PASC□-100H-****-*-** PASC□-32G-****-*-** PASC□-50G-****-*-** PASC□-63G-****-*-** ABCP-100-700 ABCP-150-1900 ABCP-225-1800 ABCP-225-2900 ABCP-350-1800 ABCP-500-2000 ABCP-700-1300 0.4MPa 260 640 1800 240 630 1550 240 600 960 200 250 420 420 580 800 1080 吊り荷重 (N) 0.5MPa 330 800 2250 300 790 1940 300 750 1200 250 320 530 530 730 1000 1360 0.7MPa 460 1120 3150 420 1100 2700 420 1050 1680 350 450 740 740 1000 1400 1900 使用圧力範囲 (MPa) ストローク (mm) 質量 (Kg) 8 10 15 200~1000 30 (1100~は特注) 200 400 1000 0.3~0.9 700 1900 1800 2900 1800 2000 1300 ☆ ストローク 200mm 時の質量です。 【シリンダタイプ オフセット型許容偏荷重値について】 オフセットタイプは偏荷重に適応するように設計されているため、昇降するアームはフランジ取り付けとなり、このフランジの許容する偏荷重値を示しています。 例えば、PASC□-32G の場合の 200Nm は、吊り重心より 1m の位置で 200N の重量を吊り下げる事が可能ということになります。 また、同 0.5m の位置では 400N となり、最大吊り荷重は 455N(アーム、ジグ、ワーク等含む)です。 1 許容偏荷重値 トルク(Nm) ☆11.4 ☆15.4 ☆31.0 34 41 47 52 52 61 66 動作原理 シリンダタイプ タテ型 シリンダタイプ ヨコ型 レール ピストンロッド トロリー レール トロリー 天秤 重量感知部 天秤 シーブ エアシリンダ 重量感知部 エアシリンダ ワイヤロープ ピストンロッド ワーク ワーク エアシリンダのピストンロッドの動きをシーブにより倍速させ、ワイ ヤロープによってワークを昇降させます。 ワークを昇降させるときに発生するワイヤロープのテンションの 変化を天秤に伝えることによりバランス圧力を変化させ、ワークを 軽く昇降させることが出来ます。 エアシリンダのピストンロッドに直接ワークを取り付け昇降します。 ワークを昇降させるときに発生するエアシリンダを含む重量の変 化を天秤に伝えることによりバランス圧力を変化させ、ワークを軽 く昇降させることが出来ます。 ドラムタイプ シリンダタイプ オフセット型 重量感知部 エア供給 パイロット 制御箱 重量感知部 中空ピストンロッド 天秤 レール 上昇 ドラム トロリー ローラ ジグ フレーム 角パイプ 下降 エアシリンダ スイベルジョイント ワーク 旋回 押しボタン グリップ アーム ワーク ジグ 軽くて剛性のあるアルミ角パイプにエアシリンダを内装して、重量感知部に より制御されたエアを中空ピストンロッドを介しシリンダ側へ供給します。 ドラム内の大口径エアシリンダで、ボールネジを介したワイヤロ ープ巻き取りスプールが回転し、ワークを昇降させます。 ワークを手で昇降させるときに発生するドラムを含むワイヤロー プのテンション変化を天秤に伝えることによりバランス圧力を変 化させ、ワークを軽く昇降させることが出来ます。 エアシリンダ本体と角パイプをローラにより偏荷重を受ける構造となってい る為、制御されたエアによりシリンダが昇降するとローラは軽く回転しジグと の偏荷重に対して非常に軽く動作します。 さらに、重量感知部の機構によりジグ、アーム等を直接手で持ち、バランス して昇降させることができます。 ワーク取り出し時等のバランス切り換えや昇降動作は、任意位置に設置でき る押しボタン等により制御します。 2 操作方法 手動重量設定タイプ (設定重量数が2つの場合) 重量が定まった数種のワークを取り付け、バランスさせて上下、位置合わせ、あるいは取り外す作業に効果的です。 1 2 3 4 1 1 1 1 2 2 2 2 1 1 2 切換ボタンで 1 の設定にしてお き、ジグのみでバランスするよ うにノブ 1 を調整します。ジグを 持って軽く昇降できます。 ワークを取り付けたあと切換 ボタンで 2 の設定にしてノブ 2 を廻し、ジグ及びワークがバ ランスするように調整します。 ジグまたはワークを持って軽 く昇降できます。 ジグまたはワークを持って着 地させ、切換ボタンで 1 の設定 にします。ジグのみのバランス に戻ってワークを外すことがで きます。 自動重量設定タイプ (標準バランス方法Bの場合) 重量が異なる複数のワークを、持上げるごとにそれらの重量を測定したバランス設定します。 1 3 2 4 ノブ 上昇ボタン バランスボタン 下降ボタン ジグを取り付け、ジグの重 量でバランスし、ジグを持っ て軽く昇降できる様、ノブを 調整します。 ジグを持って下げ、着地さ せます。 ワークをジグに乗せて上昇ボ タンを押し続け、適当なところ でボタンを離します。 ジグおよびワークはその位置 で保たれるので、ジグまたは ワークを持って搬送します。 ワークを所定の位置へ移動 させた後、バランスボタンを 押すとバランス状態になり、 ジグまたはワークを持って 軽く昇降できます。 ジグまたはワークを持って 着地させ、下降ボタンを押し 続けるとワークを外すことが できます。ワークを外した後 バランスボタンを押すとジグ のみのバランスになり、ジグ を持って軽く昇降できます。 上記標準バランス方法Bの他にU,Dの方法もありますので、ご発注の際にそれらバランス方法を御指示ください。 バランス方法 操作方法 U (2ボタン) 上昇ボタンを押してワークを上昇させ、ボタンを離すと0.5秒後に自動的にバランス状態になり、ジグまたはワークを持っ て軽く昇降できます。 次にジグまたはワークを持って着地させた後、下降ボタンを押し続けてワークを取り外します。 D (2ボタン) 上昇ボタンを押してワークを上昇させ、ボタンを離すとワークはその位置で保持されます。所定の位置へ移動し、下降ボタ ンを押して離すと0.5秒後に自動的にバランス状態になり、ジグまたはワークを持って軽く昇降できます。 次にジグまたは ワークを持って着地させた後、下降ボタンを押し続けてワークを取り外します。 3 手動重量設定タイプのエア回路例 手動重量設定タイプのバランス設定は、レギュレータで作り出した圧力を PL ポートに給気して行います。 下記の回路例をご提案いたしますので、目的の仕様にあった回路をお客様にてご用意いただきますようお願い申し上げます。 1種重量設定 切換バルブにより、0kg バランスと一定重量設定を切り替えて使用します。 元圧用レギュレータ IN PL 設定用レギュレータ 切換バルブ オプションでもご用意しております 2種重量設定 切換バルブにより、2種類の重量設定を切り替えて使用します。 元圧用レギュレータ IN PL 切換バルブ 設定用レギュレータ オプションでもご用意しております 3種重量設定 押しボタンにより、3種類の重量設定を切り替えて使用します。 元圧用レギュレータ IN PL 設定用レギュレータ 押しボタンバルブ オプションでもご用意しております 多種重量設定 電空レギュレータを使い、それに入力する電気信号で多種の設定を切り替えます。 IN 入力電気信号 PL 電-空レギュレータ 4 元圧用レギュレータ 外形図 シリンダタイプ タテ型 (V:バーチカル) A B C IN ポート Rc1/4 D G H (PASCM) J A I PASCM PASCA IN ポート Rc1/4 (PASCA) φ16 K F L ボックス M PL ポート Rc1/8 E+ストローク (PASCM) 4-制御ポート φ4 チューブ ※ PASCM(手動設定タイプ)にボック スは付きません 単位:mm N 形 式 PASCA-32VPASCA-50VPASCA-80VPASCM-32VPASCM-50VPASCM-80V- P ストローク ストローク ストローク ストローク ストローク ストローク A B C 15.5 20 30 15.5 20 30 58 58 115 58 58 115 37 52 45 37 52 45 D E F G H I J 90 124 131 90 124 131 182 264 325 182 264 325 269 391 574 269 391 574 82 102 150 82 102 150 115 127 135 57 57 78 40 44 50 40 44 50 20 20 20 20 20 20 19 30 35 19 30 35 L M N P 25 30 30 - 200 200 250 - 19.5 28 36 19.5 28 36 M10x1.25 M18x1.5 M22x1.5 M10x1.25 M18x1.5 M22x1.5 IN ポート Rc1/4 シリンダタイプ ヨコ型 (H:ホリゾンタル) 上昇端時の全長=P+(ストローク) K (PASCA) 下降端時の全長=P+(1/2 ストローク) A+(1/2 ストローク) B+(1/2 ストローク) C K D PASCA PASCM E φ16 M F ボックス G H(最小) I 4-制御ポート φ4 チューブ IN ポート Rc1/4 PL ポート Rc1/8 ※ PASCM(手動設定タイプ)にボック スは付きません (PASCM) (PASCM) 単位:mm 形 式 A B C D E F G H I J K L M N P PASCA-40H- ストローク PASCA-63H- ストローク PASCA-100H- ストローク PASCM-40H- ストローク PASCM-63H- ストローク PASCM-100H- ストローク 194 251 362 194 251 362 145 176 298 145 176 298 115 115 115 115 115 115 25 46 40 25 46 40 20 20 25 20 20 25 91 100 145 91 100 145 240 266 398 240 266 398 350 370 470 350 370 470 406 561 728 406 561 728 40 40 40 40 40 40 172 195 240 127 157 214 40 45 50 40 45 50 22 20.5 27 22 20.5 27 14 13 20 14 13 20 479 588 815 479 588 815 5 J L N 外形図 オフセットタイプ 図のように、本ユニットをお 客様の用途に合わせた固定部 にボルトで取り付けます。 フランジ部にはジグ等を取り付 けます。また、スイベルジョイン トを介せば水平回転機構を加え ることができます。 例では、レール取り付け用の フレームに本ユニットを固定 し、フランジ部にはアームを 取り付けています。 本体側フランジ 鋼球 吊り側フランジ 概要 垂直型はスイベルジョイント(水平回転機 構)が標準化されています。 お客様のアーム等にフランジを取り付 け、それをスイベルジョイントに取り付け れば、簡単に旋回アームが完成します。 鋼球受け A B 4-J 内部構造 G 吊り側フランジは本体側フランジと鋼球 により挟み込まれているため吊り側フラ ンジは軽く旋回することができます。 F H 4-J E C D スイベル寸法/仕様 ※黄色の部分が昇降します 単位:mm 型 式 A B C D E F G H J 許容偏荷重値 トルク(Nm) 許容荷重 (N) 質量 (kg) 32G用 120 100 68 72 15 12 13 45 M10 200 455 2.86 50G用 150 120 83 87 15 12 13 45 M12 400 1155 4.00 63G用 170 140 91 94 19 15 15 58 M14 1000 3250 6.70 単位:mm A B C D E F H J K M N P Q R S T JT JU V W Y JY Z PASC -32G- ストローク 147.5 103 251 98 129 120 100 106 290 90 75 110 140 10.5 6 77 93.7 12 14.7 72 10.5 M10 60 PASC -50G- ストローク 160.5 163 382 158 219 150 120 167 350 100 115 160 200 11 8 94 110.7 12 14.7 87 12.5 M12 90 PASC -63G- ストローク 250 205.5 465 200.5 259.5 170 140 230 410 150 140 200 255 11 6 116 140 15 19 94 15 M14 112.5 形 式 ドラムタイプ 4.5 A B 18 4.5 J D 116 K 145.5 50 145.5 C φ17.5 40 350 27 G H E F I 4-制御ポート φ4チューブ IN ポート Rc1/4 ジグバランス設定 レギュレータ φ21 15 16 単位:mm 11 ストローク 形 式 A B C D E F G ABCP-150-1900 499 66 24 317 648 630 347 ABCP-225-1800 503 70 44 317 703 685 ABCP-225-2900 528 95 44 317 753 735 ABCP-350-1800 528 95 44 317 753 ABCP-500-2000 621 113 26 392 ABCP-700-1300 597 89 50 392 6 H I J K 17.5 165 249 209 400 23 218 262 204 458 35 272 276 204 735 458 35 272 279 200 753 735 458 35 272 335 275 753 735 458 35 272 335 270 応用例 軽い動き スムーズな動き 校正用おもりをそっとはかり に乗せ、はかりの品質を検査 します。ゆっくりとスムーズに 昇降したい場合に有効です。 重量のある完成品を、発泡 スチロールのようなもろい材 質へ正確に挿入する出荷工 程などで使用できます。 校正用おもり 42 被測定はかり 正確な位置合わせ 装置の軽量化 ジグによって吊り下げられた 重い部品を相手に組み付ける 工程等で使用できます。 部品側のボルト穴を相手側の ボルトに位置を確認しながら 組み付けることができます。 簡単な設備で高度な位置決め 作業が可能になります。 重くて大きなシリンダ 軽くて小さなシリンダ のパスハンド パスハンドはシリンダ直動でも操作力が軽いので、従来の ような倍速機構に依存する必要がなく、小さな径のシリンダ で設備の設計が出来、軽量化が図れます。 2本レールタイプ ポールタイプ 横行、走行が可能なフレームに本ユニットを取り付け、スイベル ジョイントにアームを取り付ければ昇降と同時に旋回可能なバラ ンサが完成します。 自動車のインパネ搭載装置など…。 ポール、アーム、スイベルジョイントにより、極座標動作のバ ランサが完成します。 バッテリー移載装置など…。 アーム レール アーム レール ポール フレーム スイベルジョイント アーム 7 スイベルジョイント 型式表示方法 [シリンダタイプ] PASCM-32V-500-2-G2 重量設定方式 記号 PASCM PASCA 重量設定方法 手動設定 自動設定 <タテ型>シリンダサイズ 記号 32V 50V 80V シリンダ径(mm) 32 50 80 <PASCM>の場合 ※オプション バランス切換ボックスの選定 <PASCA><PASKP>の場合 バランス設定の操作方法選定 記号 0 1 2 3 記号 バランス設定重量の数 オプションなし 1 重量 2 重量 3 重量 4 重量以上は特注 <ヨコ型>シリンダサイズ 記号 40H 63H 100H B U シリンダ径(mm) 40 63 100 D ボタン操作内容 U ボタン:上昇し、放すとその位置で固定 B ボタン:バランス D ボタン:下降、またはワーク取り外し U ボタン:上昇し、放すと自動バランス D ボタン:下降、またはワーク取り外し U ボタン:上昇 D ボタン:下降し、放すと自動バランス、 またはワーク取り外し <オフセット型>シリンダサイズ 記号 32G 50G 63G シリンダ径(mm) 32 50 63 必要ストローク(50mm 単位) ~ 必要ストローク(mm) 100 ~ 記号 100 1000 1000 操作スイッチ ※オプション 記号 XX S2 G2 G3 B2 B3 SG SB PASCM 用途 - バランス設定1、2の切換 バランス設定1、2の切換 バランス設定1、2、3の切換 バランス設定1、2の切換 バランス設定1、2、3の切換 バランス設定1、2の切換 バランス設定1、2、3の切換 スイッチ種類 な し 2切換セレクトスイッチ 2ボタングリップスイッチ 3ボタングリップスイッチ 2ボタンボックススイッチ 3ボタンボックススイッチ スライドグリップスイッチ スライドグリップボタン付 PASCA PASKP 用途 - - 操作方式 U、または D 操作方式 B 操作方式 U、または D 操作方式 B 操作方式 U、または D 操作方式 B 1050 以上は特注 [ドラムタイプ] ABCP-150-1900-B-G2 P.4の型式より選択してください PASCM 用バランス切換ボックス(オプション) 2重量 3重量 ボックス寸法 75x150x45 ボックス寸法 75x222x45 (突起部含まず) (突起部含まず) 1重量 重量感知部に直配管となります 操 作 ス イッチ(オプション) セレクトスイッチ 2切換(S2) 80x50x120 グリップスイッチ ボタンスイッチ スライドグリップスイッチ (ストレートチューブ 1000mm 付) (ストレートチューブ 1000mm 付) (ストレートチューブ 1000mm 付) 2ボタン(G2) 46x47x138 2ボタン(B2) 上下アクション(GS) 3ボタン(B3) ボタン付(SB) 3ボタン(G3) 56x47x138 参考寸法 60x110x30 8 参考寸法 55x206x70 各タイプの性能比較 シ リ ー ズ タ イ プ シリンダ ドラム シリンダ ドラム 式 PASE ABC PASC ABCP ワーク持ち昇降 簡易的に可 簡易的に可 可 可 設 置 天 井 高 高い 低い 高い(ヨコ型は低い) 低い 操作部取付場所 吊下げ重心位置 吊下げ重心位置 任意 任意 慣 性 力 感 知 あり あり なし なし 昇 降 ス ピ ー ド 300mm/sec 300mm/sec 150mm/sec 150mm/sec 400N 荷重操作力 15N 15N 20N 20N 1500N 荷重操作力 30N 30N 40N 40N やや波打ち やや波打ち 滑らか 滑らか 形 特 長 ( バ ラ ン ス 時 ) 操 作 感 機種別取付部寸法表 -詳しくは外形図をご覧下さい- -詳しくは外形図をご覧下さい- シリンダタイプ ドラムタイプ A 取付穴 A 単位:mm 取付穴 B A A B 50 115 B B Φ35 12.5 12.5 シリンダタイプ タテ型 シリンダタイプ ヨコ型 サイズ A Φ17 サイズ 取付穴 A B 32□ Φ17 20 58 50□ Φ17 20 80□ Φ17 20 B 取付穴 A B 40□ Φ17 40 115 58 63□ Φ17 45 115 115 100□ Φ17 50 115 A B シリンダタイプ オフセット型 ドラムタイプ サイズ 取付穴 A B A 単位:mm 取付穴 C A C 単位:mm 32□ Φ11 110 90 6 50□ Φ11 160 100 8 63□ Φ11 200 150 6 A B 50 115 B B 9 Φ17 注意事項・安全機構について 次に示す事項を念頭において取り扱いに十分注意し、必要に応じて 二次的または補助安全対策をお願いいたします。 ワークを吊った状態でエア元の供給が遮断された場合、落下防止機構の作動によりワ ークが急激に落下することはありませんが、そのまま放置しておくと徐々に下降します。 落下防止機構は、エアが「瞬時」に切れた時のみ作動します。配管不備による漏れなど、 エアの圧力が徐々に低下した場合は、その漏れ量に従ってワークは下降しますので、エ アの供給や配管の保護には十分注意して下さい。 重量感知部、制御箱周辺のチューブなどが切れたり(外れたり)して、エアの圧力が低下 あるいは停止した場合は、エアの漏れの量に従ってワークは落下しますので、チューブな どの保護には十分注意してください。 重量感知部が常に正しい姿勢でないと、バランス状態が不安定、あるい設定不能となる ので、本体の取り付けには十分注意してください。 エアの供給中に、吊り下がっているジグ、ワークなどが外れた場合は、先端部分が跳ね上 がりますので、ジグ、ワークが外れることがない様、確実に取付けてください。(ドラムタ イプは外れてから 0.02~0.1 秒後にワイヤがロックされます) 使用エアは、水分や油分等が混入していない、乾いた状態で供給して下さい。 10
© Copyright 2026 Paperzz