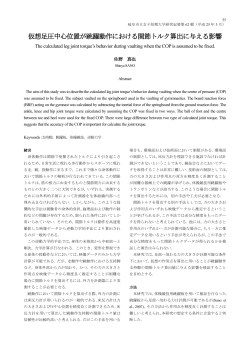
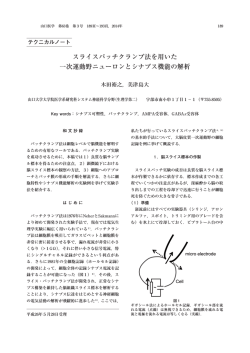
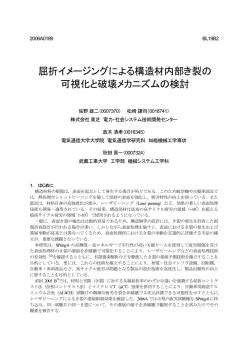
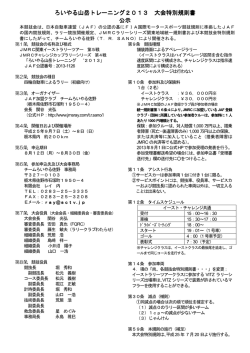
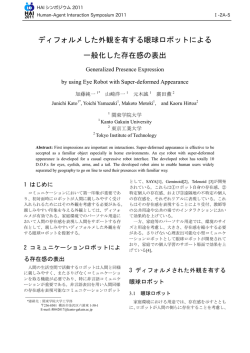
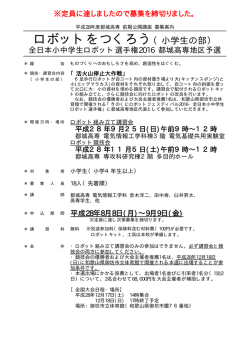
視覚障がい者向け随伴型ロボットによるインタラクティブ行動支援 Interactive Action Support based on a Partner Robot for Visual Impaired people 佐野 睦夫† Mutsuo SANO† †大阪工業大学情報科学部 E-mail: †Osaka Institute of Technology †[email protected] 1. は じ め に した近接センサや距離センサなどにより,障害物や進 中 途 失 明 者 の 多 く は ,今 ま で 取 得 で き た 生 活 環 境 情 路情報に対する情報提供は可能である.しかし,人間 報の多くが取得できなくなり,精神的に不安を抱えて との対話の促進や広範囲な視野が必要となる景色など いる.従来の視覚障がい者ナビゲーション研究では, の環境情報の提供などは困難である.ウェアラブルカ 歩 行 誘 導 に 関 す る 研 究 [1]が 多 く ,歩 行 時 の 周 囲 の 環 境 メラの場合では,太陽光に対するダイナミックレンジ 理解や対話者の状況理解などを支援するインタフェー の問題はあるものの,比較的,広範囲な視野にある対 スに関しては十分に検討されていない.我々の研究グ 象物や人間の発見などの視覚代行は原理的に可能であ ループでは,今まで,屋外で自律移動可能な随伴型ロ ボ ッ ト の 開 発 [2][3][4][5][6]を 進 め て き た . さ ら に , 意 図 推 定 に よ る 行 動 支 援 [7] や コ ミ ュ ニ ケ ー シ ョ ン 仲 介 に 関 す る 研 究 [8]な ど ,人 間・ロ ボ ッ ト 間 の コ ミ ュ ニ ケ ー シ ョ ン 制 御 に 関 す る 研 究 も 進 め て い る .本 研 究 で は , これらの研究成果を活用し,日常的な対話を通して, 随伴型ロボットが能動的に情報取得を行い,インタラ る.しかしながら,対話者への自然な働きかけは困難 である. 一方,提案する随伴型ロボットでは,能動的な自律 移動ができ,対話者への自然な働きかけが原理的に可 能である.また,対象物に対しても積極的な情報取得 ができる能力を有する. クティブに行動支援を行う方式を提案する. 2. 視 覚 障 が い 者 向 け 随 伴 型 ロ ボ ッ ト に よ る 日 常行動支援システムのデザイン 提案する視覚障がい者向け随伴型ロボットによる 日常行動支援システムの機能要素を図1に示す.視覚 障がい者にとって,日常生活における不安により起因 する心的負荷の軽減やモチベーションの維持が重要と なる.提案する随伴型ロボットの機能としては, ・自律移動機能による障害物回避および目的地までの ナビゲーション機能 ・対話によるコミュニケーション促進機能 ・障がい者の意図推定機能 ・困ったときの視覚代行機能 ・コミュニケーション仲介機能 ・景色などの環境情報提供機能 ・医療やリハビリ機関に対する日常行動のログ提供機 能および遠隔での指示受付機能 ・障がい者のモチベーションを向上させる働きかけ が挙げられる. 従来の振動ナビゲーションは,電子白杖などに搭載 図1 提案する視覚障がい者向け随伴型ロボットに よる日常行動支援システムの機能要素 3. イ ン タ ラ ク シ ョ ン ス キ ー マ に 基 づ く 行 動 選 択とコミュニケーション生成 5. ま と め 本報告では,視覚障がい者と日常的な対話を通して, 図2,図3に,提案する支援システムの基盤となっ 随伴型ロボットが能動的に情報取得を行い,インタラ ているコミュニケーション生成方式を示す.具体的に クティブに行動支援を行う方式を提案した.現在,セ は,ダイナミックベイジアンネットワークにより定式 ンシング認識系を含めて,プロトタイプを実装中であ 化された確率的状態遷移モデルに基づき,意図推定を り,視覚障がい者に対して評価実験を計画中である. 行う.推定された障がい者の状態を,図3で定義され たインタラクションスキーマに入力し,ロボットの行 文 動選択およびコミュニケーション生成を行う. [1] [2] [3] [4] [5] 図2 随伴型ロボットによる意図推定とコミュ ニケーション生成 [6] [7] [8] 図3 インタラクションスキーマ 献 村 上 満 佳 子 ,立 石 敏 孝 ,井 村 誠 孝 ,安 室 喜 弘 , 黒 田 知 宏 , 眞 鍋 佳 嗣 , 千 原 國 宏 ,“ 視 覚 障 害 者 の ための状況推定を導入した電子白杖の構築シス テ ム ,” 制 御 情 報 学 会 論 文 誌 , Vol.16, No.6, pp.287-294, 2003. 緩利圭輔,大神仁,橋本和樹,森家大治,小 山晃 司 ,宮 脇 健三 郎 ,西 口 敏司 ,小 松 信 雄 ,井 上 雄 紀 , 佐 野 睦 夫 ,“ 屋 内 外 の セ ン シ ン グ 環 境 に 適 応 で き る ロ ボ ッ ト ナ ビ ゲ ー シ ョ ン ,”第 12 回 計 測 自動制御学会システムインテグレーション部門 講 演 会 SI2011, 2011.12. 緩利圭輔,藤川貴史,星野仁義,石谷孝夫, 濱 邊 良 充 ,諸 隈 功 ,小 山 晃 司 ,角 哲 郎 ,井 上 雄 紀 , 西 口 敏 司 , 小 松 信 雄 , 佐 野 睦 夫 ,“ 実 世 界 に お け る自律移動ロボットの地図生成と自己位置推 定 ,”第 11 回 計 測 自 動 制 御 学 会 シ ス テ ム イ ン テ グ レ ー シ ョ ン 部 門 講 演 会 SI2010, 2010.12. 佐 伯 豪 介 ,佐 野 睦 夫 ,“ 視 覚 障 害 者 の 歩 行 ダ イ ナ ミ ク ス を 考 慮 し た 旋 回 指 示 タ イ ミ ン グ 生 成 ,” 電子情報通信学会 関西支部 学生会 第15回 学 生 会 研 究 発 表 講 演 会 , 2010. 佐 野 睦 夫 ,“ 人 間 と 協 調 歩 行 す る 盲 導 犬 ロ ボ ッ ト の イ ン タ ラ ク シ ョ ン 方 式 ,”第 24 回 人 工 知 能 学 会 全 国 大 会 , 2010. 佐 野 睦 夫 ,宮 脇 健 三 郎 ,井 上 雄 紀 ,西 口 敏 司 , 橋 本 渉 ,“ 生 活 支 援 型 盲 導 犬 ロ ボ ッ ト 「 プ ロ キ オ ン 」の 開 発 ,”日 本 ロ ボ ッ ト 学 会 学 術 講 演 会 ,2011. M.Sano, Kenzaburou Miyawaki, Toshiki Yokote, Ryouji Nishimura, and Yutaka Kimura : “Multi-Aspect Model for Human-Robot Interaction –Mutual Understanding and Estimation”, Proc. of 16 t h IEEE International Symposium on Robot & Human Interactive Communication (RO-MAN 2007),pp.69-74, August 2007. Mutsuo Sano, Kenzaburo Miyawaki, Tomoharu Yamaguchi, Ryouhei Sasama, and Keiji Yamada,” A Robotic Introducer Agent Based on Adaptive Embodied Entrainment Control,” 13 t h International Conference on Human-Computer Interaction (HCI International 2009)
© Copyright 2026 Paperzz