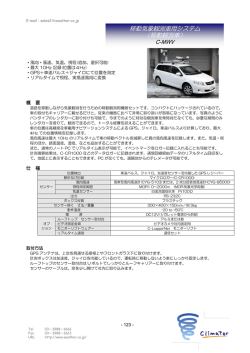
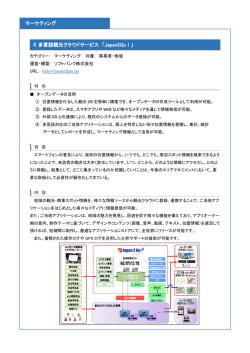
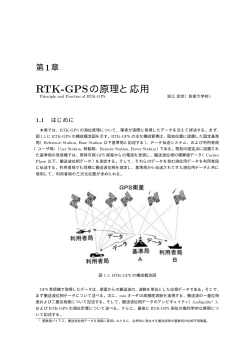
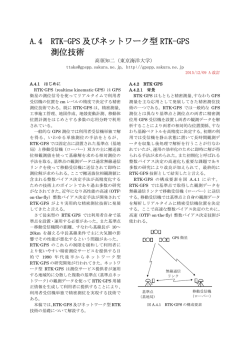
GPS 制御 実車走行試験用ロボット NaviControl 脱着可能な RTK-GPS 制御ロボットによる 完全自動無人走行試験 ステアリングロボット ● ● ● ● ● アクセル / ブレーキロボット ギアロボット ステアリング・アクセル&ブレーキ・ギアロボットで自動運転 脱着可能で簡単に各種自動車に取付可能 RTK-GPS 方式で数 cm の軌道再現性 マップエディタ機能で実際に走行した軌跡をメモリし無人運転で再現可能 様々なトラブルでの緊急停止装置で安全設計 イタリア HI-TEC 社 GPS 制御 実車走行試験用ロボット NaviControl HITEC 社(伊)GPS 制御実車走行試験用ロボット「Navicontrol」 とはテストコース内において各種自動車を完全自動 / 半自動 / 遠 隔操作で定義された軌跡および速度でハンドルブレーキ / アクセ ル / クラッチ、ギアロボットを使いかつ高再現性かつ安全に実走 行試験をする RTK-GPS 制御のロボットです。NaviControl の各 ロボットは脱着可能で簡単に各種自動車に取り付けられます。 NaviControl は RTK-GPS を装備することで極めて高精度かつ 再現性の高い走行を実現します。完全な無人走行も可能ですので、 急ブレーキ / 衝突 / 横転 / ポッドテスト等を ドライバーを危険に さらすことなく行えます。 車両に取り付けられた各ロボット こ の 製 品 は 干 渉 測 位 方 式 と 呼 ば れ る RTK-GPS(Real Time Kinematic GPS)と IMU(慣性計測ユニット:3 軸ジャイロ+ 3 軸加速度計)を使用し、車を動かしたい軌跡で速度制御をしなが ら完全無人自動走行できるものです。RTK-GPS 方式の為、試験 車両(移動局)と地上に設置した基地局(固定局)の 2 か所の GPS 受信アンテナで、受信機から衛星までの正確な距離を搬送 波数と位相差から検出されます。 車両側には、ハンドルを制御するステアリングロボットやアクセ ル / ブレーキ / ギアロボットを装着し速度、位置を制御します。 基地局側では補正用 GPS 信号を受信したり、システムの設定 / 監視 / コントローラ操作を行います。これらは Wi-Fi や LTE な ど無線による指令の通信を行います。 特長 ■高精度・高再現性 1 秒間に 50 回のトラッキング制御を行うことで 位置制御精度 :5cm 速度制御精度 : ± 0.5km/h 加減速制御精度 :0.03G を 実現しています。 ギアロボット ステアリングロボット アクセルロボット ブレーキロボット クラッチロボット ● アクセルロボットは安全上の理由で緊急停止時ガススプリング でアクセルを戻す機能有。 ● ブレーキロボットは 2 シリンダでモータコントロールおよび緊 急ブレーキ用エア方式 NaviControl の基本概念(2 つの GPS アンテナ使用) 基準 GPS アンテナ GPS 衛星 高再現性でスラローム走行等の試験 ■各ロボットの取付が簡単 このような脱着可能なロボットで重要事項の一つに各ロボットの 取付時間を含めたセットアップ時間があります。製品によっては ロボットの取り付け作業だけで 1 日かかり、重要な実走行試験に 支障をきたすのでは効率が悪すぎます。すべてのロボットは小型・ 軽量でねじ締めにより簡単に取り付けられます。特にステアリン グロボットは約 6kg と軽量化に成功し、装着時間は経験にもよ りますがすべてのセットアップを含めても約 2 時間程度です。 RTK-GPS 方式 通信 (WiFi, LTE, etc.) ※ Wi-Fi 周波数帯は 2.4GHz または 4.9GHz(要登録)選択可 2 簡単に各種車両に装着可能 ■車載側のシステムの堅牢さ 主なアプリケーション 当然ですがこのシステムは 急ブレーキ / 衝突 / 横転 / 凸凹衝撃 試験のような過酷な試験を想定しており。とても堅牢に設計され ています。インパクトで 100G、連続で 5G 以下と高耐久 G 性能 を兼ね備えています。 ● ● ● ● ● 高速耐久 / 各種路面での耐久試験 凸凹衝撃試験 急ブレーキ試験 衝突試験 J ターン、フィッシュフック等の規格試験 の高精度 / 高再現性や安全性を重視する試験全般です。 ユニークなアプリケーションとして海外の軍隊等での危険地帯内 の先導車コントロール、爆発物等の危険物処理、無人監視用巡回 車としても使われています 無人での凸凹衝撃試験 衝突試験に耐えうる堅牢さ ■ハードウェア・ソフトウェア特注に柔軟に対応 この製品の製造元のイタリア HI-TEC 社はシステムインテグレー タ会社です。特に自動車のギアシフトには様々な形状があり、 ロッ ク解除ボタンの位置も各車種により異なるため、それに合わせた ギアロボットが必要ですが、このような特注ハードウェアも製作 可能で、建機・フォークリフト等の特殊な形状のハンドルにも対 応できます。またソフトウェアに関しても画面表示や特別なシー ケンスの特注にも対応可能です。 加減速試験 耐久試験 凸凹衝撃試験 衝突試験 フォークリフトの無人運転システム ■ MultiControl で複数車同時走行可能(オプション) ±5 cm 軌道精度 テストコースを高効率で運用する際、' 複数車両で同時走行可能 な機能 ' にも対応可能です。 特にサーキット内で耐久試験・高速走行試験を複数台同時に行う ことで大幅な試験効率向上とコスト削減に貢献します。 堅牢 多種なアプリケーション ■ GPS 状態のあまり良くないテストコースでも対応可能 (オプション) 障害物やトンネルで一時的に GPS 信号が途絶えても慣性計測装 置で自動運転し GPS 信号復帰後通常自動運転ができるシステム にも対応できます。 3 イタリア HI-TEC 社 GPS 制御 実車走行試験用ロボット NaviControl 自動車側の構成 ソフトウェア 自動車側基本構成 GPS&IMU 無線 LAN ステアリングロボット (モータ駆動) コントロール ユニット バッテリ(電源) NaviControl Software は、加減速プロファイルを持ったトラック (軌道)を作成できます。トラック(軌道)の設定時にであらか じめ定義された設定を挿入することができます。 基地局は全てのナビゲーションデータ及び診断システムをモニタ します。ナビゲーションデータ(位置、速度、車首方向)がベー スステーションにログされ、オプションの 64 のアナログ入力チャ ンネル、8 デジタル I/O と 256 × 2 CAN バスチャネルに取得され、 コントロールユニットに保存することができます。 コ ン ト ロ ー ル ユ ニ ッ ト に イ ン ス ト ー ル さ れ た NaviEmbed Software は、車両のステアリングをリアルタイムに補正し、設定 軌道に対する誤差が直線上 5cm 以下およびカーブ約 20cm 以下 になるよう制御します(車両の動的挙動による) 。ブレーキロボッ トは、変位または力制御で駆動することができます。 軌道の作成方法 アクセル ブレーキロボット (モータ駆動) シフトロボット (モータ駆動) その後 座標ベースで速度を定義します ※電源はバッテリより供給 基地局側の構成 基地局側基本構成 GPS &通信アンテナ (Wi-Fi ,LTE,etc.) PC 緊急停止付 コントロールパッド EMERGENCY PUSH BUTTOM 基地局側コントロール BOX 基地局側でも緊急停止が可能 4 ● 実際に走行させその軌道を記憶 ( ラーンモード) ● PC で演算や補間をさせて作成 ● 上記方向で作成したデータを一部分のみ編集可能 コントロールユニット NaviControl の安全性 助手席などに設置するコントロールユニットは、ステアリングロ ボットやアクセル / ブレーキロボットとギアシフトロボットを制 御します。 リモートコントローラを使用することで、軌道に車を移動、シス テムステータスを確認、簡単なシステムセットアップを行うこと ができます。 さらにコントロールユニットには、GPS アンテナ、IMU(慣性 測定ユニット)、車載カメラと Wi-Fi アクセスポイントが接続さ れます。耐久性などの過酷なテストのために耐振動性の高いのペ リカンケースを使用しています。 自動運転ロボットの安全性はとても重要です。この製品を使用 する主なフィールドは、自動車メーカや公共のテストコースで す。無人で走行しているとはいえ、様々なトラブルによる自動車 の暴走、衝突は避けるべき重大事項です。本ロボットは設定ルー トから規定値を逸脱すると自動的にブレーキ機能が働きます。ま た基地局には独立緊急ブレーキシステムを兼ね備えており、緊急 時に人の判断で車を停止できます。さらに、システム電源喪失や GPS 信号の一定時間以上の遮断、車両 - 基地局間の通信遮断等の 様々な想定に基づき安全機能が働きます。 緊急ブレーキ動作させる監視項目 ● 設定軌跡からの逸脱(距離定義可能) ● GPS 信号喪失 ● WiFi 接続切断 ● システム・コンポーネントの不具合 緊急停止時のロボットの挙動 ● 空気圧(緊急停止)ブレーキ ● 電気ブレーキ ● アクセルオフ ( スプリングで強制オフ ) ● ステアリング操舵維持 NaviControl Control ユニット: マニュアルギアロボット付モデル(ロボット接続側) ご発注までの流れ NaviControl Control ユニット: マニュアルギアロボット付モデル(データロガー& CAN バス接続側) この製品は、性格上すべてのお客様がデモンストレーションをご 要求されます。事前にお打ち合わせをさせていただき、ご要望の テストパターン(スラローム走行、定常円旋回、ポッドテスト等) や計測パラメータ(加速度、振動等)を決定します。 次に、お客様の所有のテストコース、または、日本自動車研究所 等の貸出可能なテストコースをスケジューリングしていただき試 験車を確保の上、デモンストレーションを行わせていただきます。 ご発注までの主な流れ ●お打ち合わせ 自動運転の種類・パターンの決定 (S 字、定常円旋回、等) その他内容 (計測パラメータ 等) リモートコントローラ GPS アンテナ 3 軸加速度・3 軸ジャイロセンサ (IMU センサ) ↓ ●ご要望によりデモンストレーション スケジュール、デモフィールド確保等 ↓ ●お見積り 一般仕様 軌道再現精度 速度コントロール精度 加 / 減速精度 ± 5 cm ± 0.03 G 12 VDC 設置時間(オートマチック車 経験による) < 2 時間 耐衝撃(各軸) ●ご発注 ± 0.5 km/h 電源(車のバッテリ使用) 動作温度 ↓ -5 - +55℃ 100 G 5 イタリア HI-TEC 社 GPS 制御 実車走行試験用ロボット NaviControl ステアリングロボットの標準モデル ブレーキ・アクセル・ギアロボットの標準モデル ステアリングロボットは、様々なお客様の要求のために広範囲の ステアリング入力のラインナップがあります。 これらのモデルは、衝撃試験レベルに応じて、運転席やルーフや フロントガラスに固定します ブレーキロボット - BR66P8 最大荷重 最大スピード 可動ストローク 型 番 DR66PS50 DR66H100 DR98PS10 ピークトルク [Nm] 20 @ 38 rpm 28 @ 25 rpm 35 連続トルク [Nm] 8 8 20 @ 200 rpm 最大回転数 [rpm] 60 30 200 モータタイプ 800 N 400 mm/s 50 - 150 mm ステッピング すべてのブレーキロボットモジュールは、緊急停止用圧縮空気アクチュエータ(EB オプション)が追加可能です ※ 400N モデル BR66P4 有 アクセル・クラッチロボット - AR46P4 最大荷重 最大スピード 可動ストローク モータタイプ 450 N 250 mm/s 50 - 150 mm ステッピング 安全上の理由から、アクセルロボットが緊急時、アクセル開度を回復するために 事前ロードされたガススプリング(RS オプション)を供給可。 ギアロボット - AR46P25 最大荷重 最大スピード 可動ストローク モータタイプ 720 N 150 mm/s 50 - 150 mm ステッピング ※車種に合わせて特注可能 軽量型、高耐 G 型等アプリケーションに合わせて特注可能です アクセルロボット(踏力 400N または 800N モデルあり) 各ロボットは簡単に取り付け・取り外 しができるように設計されています。 ブレーキロボット ※各ロボットは特注可能です。お問合せください。 6 ロボットを使用しての計測ソリューション 東陽テクニカでは NaviCntrol を使っての様々な計測器のライナップがございます。一例をご紹介します。 動画解析ソフトウェア TrackImage レポート作成支援ソフトウェア TrackReport 動画から特徴点の変位を、高速・高精度に解析 センサデータと統合してデータの後処理、 レポート出力までを完全サポート ■特長 動画解析ソフトウェア TrackImage レポート作成支援ソフトウェア TrackReport (例:EuroNCAP 用レポート) 指定のターゲット不要で特徴点解析が可能 ● 2D/ 3D 解析に対応 ● 光学ひずみ補正 ● サブピクセル処理(最大 1/20) ● 動画の重ね描き ● 豊富な解析用関数 (基本解析、周波数解析、衝突実験認証用解析まで) ● ASAM-ODS クライアント機能 多チャンネル・小型 モジュール式データロガー imc CRONOS-COMPACT ■特長 ● ● ● ● ● ● ● ● 電圧、電流、温度、ひずみ、ICP センサ、回転パルスなどの入力 最大サンプリングレート :100kHz/ch システム合計サンプリングレート :400kHz 最大アナログ入力チャンネル数 :128ch CAN、LIN、FlexRay、CCP、XCP の計測 最大フィールドバス入力チャンネル数:512ch(アナログとの合計) GPS、動画(カメラを PC に接続)の同期計測 リアルタイム演算機能(統計、FFT 分析、次数分析、頻度処理など) 7 ロボットを使用しての計測ソリューション 東陽テクニカでは NaviCntrol を使っての様々な計測器のライナップがございます。一例をご紹介します。 太陽光・振動に強い動的アライメント測定器 EZ Metrology 社製 EZ Motion 走行中のホイール・エンジンなどの挙動を測定 動的なカメラ制御により、太陽光の影響を排除 飛出し量が少なく、振動に強い ホイール挙動測定セットアップ エンジン挙動測定セットアップ 重量:約 3kg ホイール測定用プローブ 測定用カメラ(モーションキャプチャ方式) エンジン測定用ターゲット 特長 用途に応じたシステムの調整に対応 ■屋外で利用可能なモーションキャプチャシステム ・サンルーフ や車室内の部品挙動の測定に利用可能 ■高精度な測定 変位 ± 0.07mm 角度 ± 0.013 ° ■高速サンプリング: 500Hz ■振動のキャンセル機能(相対変位測定) ■外乱光ノイズ除去フィルタ(太陽光対策) ■アナログ信号入力オプション ■外部機器との同期測定オプション 計測範囲や計測精度の調整が可能です。 たとえば、強度・耐久試験用途と操安・乗り心地試験用途では要 求される仕様が異なってきます。それぞれのニーズに合わせたカ メラシステムを設計し、最適なソリューションをご提案します。 前輪用 後輪用 機械制御計測部 〒103-8284 東京都中央区八重洲1-1-6 TEL. 03-3279-0771 FAX. 03-3246-0645 E-Mail:[email protected] www.toyo.co.jp 大 阪 支 店 〒532-0003 大阪府大阪市淀川区宮原 1-6-1(新大阪ブリックビル) TEL. 06-6399-9771 FAX. 06-6399-9781 名 古 屋 営 業 所 〒465-0095 愛知県名古屋市名東区高社 1-263(一社中央ビル) TEL. 052-772-2971 FAX. 052-776-2559 宇 都 宮 営 業 所 〒321-0953 栃木県宇都宮市東宿郷 2-4-3(宇都宮大塚ビル) TEL. 028-678-9117 FAX. 028-638-5380 電子技術センター 〒103-8284 東京都中央区八重洲 1-1-6 TEL. 03-3279-0771 FAX. 03-3246-0645 〒103-0021 東京都中央区日本橋本石町 1-1-2 TEL. 03-3279-0771 FAX. 03-3246-0645 テクノロジーインターフェースセンター 本カタログに記載された商品の機能・性能は断りなく変更されることがあります。 HIT-4634-01-1605000-146-1.0-S63-CA
© Copyright 2026 Paperzz