東京工業大学大学院理工学研究科
<< 博 士 論 文 >>
交流電動機駆動用
5 レベル PWM インバータの
直流電圧均一回路の研究
平成 24 年 3 月
主指導教員
赤木 泰文
教 授
提 出 者
専 攻
電気電子工学専攻
学籍番号
09D13088
氏 名
長谷川 一徳
i
目次
第 1 章 序論
1
研究背景 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1.1.1
パワーエレクトロニクスの技術発展 . . . . . . . . . . . . . . . . .
1
1.1.2
交流電動機の可変速駆動 . . . . . . . . . . . . . . . . . . . . . . .
3
1.1.3
高圧モータドライブシステムとその技術課題 . . . . . . . . . . . .
4
1.1.4
5 レベルダイオードクランプ PWM インバータ . . . . . . . . . . .
6
1.2
本論文の目的 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
1.3
本論文の構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
1.1
第 2 章 高圧電力変換システムの技術動向
11
2.1
高圧システム用変換器の分類 . . . . . . . . . . . . . . . . . . . . . . . .
11
2.2
マルチレベル変換器 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
2.2.1
ダイオードクランプ形 . . . . . . . . . . . . . . . . . . . . . . . .
13
2.2.2
フライングキャパシタ形 . . . . . . . . . . . . . . . . . . . . . . .
15
2.2.3
モジュラー・マルチレベル・カスケード変換器 (MMCC) . . . . .
16
2.2.4
その他のマルチレベル変換器 . . . . . . . . . . . . . . . . . . . .
19
2.3
高圧モータドライブ基本的な構成と用途 . . . . . . . . . . . . . . . . . .
22
2.4
電源高調波電流の抑制 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
2.4.1
三相多パルスダイオード整流器 . . . . . . . . . . . . . . . . . . .
24
2.4.2
ハイブリッドフィルタ . . . . . . . . . . . . . . . . . . . . . . . .
25
現行の高圧モータドライブ . . . . . . . . . . . . . . . . . . . . . . . . . .
28
2.5.1
3 レベル PWM 整流器・インバータを用いたモータドライブ . . .
28
2.5.2
多巻線・多相変圧器を用いたモータドライブ . . . . . . . . . . . .
28
2.5
目次
ii
マトリクスコンバータを用いた高圧モータドライブ . . . . . . . .
30
次世代高圧モータドライブの研究動向 . . . . . . . . . . . . . . . . . . .
32
2.5.3
2.6
2.6.1
ドライブ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
32
MMCC-DSCC を用いた高圧モータドライブ . . . . . . . . . . . .
33
高圧電力変換システムの技術動向と本論文の位置付け . . . . . . . . . . .
34
2.6.2
2.7
MMCC-SSBC と双方向絶縁型 DC/DC コンバータを用いたモータ
第 3 章 5 レベルダイオードクランプインバータの動作原理と技術動向
35
基本原理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
35
3.1.1
回路構成とスイッチングモード . . . . . . . . . . . . . . . . . . .
35
3.1.2
スイッチング損失とリカバリ損失 . . . . . . . . . . . . . . . . . .
39
3.1.3
PWM 制御法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
39
3.2
分圧不均一の発生原理 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
41
3.3
分圧不均一の抑制法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
43
3.3.1
PWM 整流器を用いる場合 . . . . . . . . . . . . . . . . . . . . . .
43
3.3.2
ダイオード整流器を用いる場合 . . . . . . . . . . . . . . . . . . .
44
直流電圧均一回路 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
45
3.4.1
基本構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
45
3.4.2
チョッパ回路を用いた直流電圧均一回路 . . . . . . . . . . . . . .
46
直流電圧均一回路の電流定格 . . . . . . . . . . . . . . . . . . . . . . . .
47
3.5.1
節点 P1 に流入,節点 N1 から流出する直流電流の解析 . . . . . .
48
3.5.2
2 乗低減トルク負荷における電流定格 . . . . . . . . . . . . . . . .
50
6.6 kV 高圧モータドライブへの応用例 . . . . . . . . . . . . . . . . . . .
51
3.6.1
6.6 kV トランスレス直接受電 . . . . . . . . . . . . . . . . . . . .
51
3.6.2
22 kV 受電モータドライブ . . . . . . . . . . . . . . . . . . . . . .
52
3.1
3.4
3.5
3.6
第 4 章 クランプダイオードを付加した直流電圧均一回路
4.1
55
回路構成と基本原理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
55
4.1.1
回路構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
55
4.1.2
T1 と T3 の決定 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
57
4.1.3
インダクタ電流断続モードにおける動作 . . . . . . . . . . . . . .
58
目次
iii
直流電圧均一回路の制御法 . . . . . . . . . . . . . . . . . . . . . .
58
実験結果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
59
4.2.1
実験システム構成 . . . . . . . . . . . . . . . . . . . . . . . . . . .
59
4.2.2
2 直列 IGBT の電圧分担 . . . . . . . . . . . . . . . . . . . . . . .
60
4.2.3
∆D によるインダクタ電流の増加 . . . . . . . . . . . . . . . . . .
60
4.2.4
誘導電動機駆動時の実験結果 . . . . . . . . . . . . . . . . . . . .
61
第 4 章まとめ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
62
4.1.4
4.2
4.3
第 5 章 結合インダクタを用いた直流電圧均一回路
5.1
5.2
5.3
5.4
5.5
5.6
69
回路構成と基本原理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
69
5.1.1
回路構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
69
5.1.2
漏れインダクタンスの必要性 . . . . . . . . . . . . . . . . . . . .
71
5.1.3
先行回路との比較 . . . . . . . . . . . . . . . . . . . . . . . . . . .
73
5.1.4
結合インダクタの巻き方 . . . . . . . . . . . . . . . . . . . . . . .
73
5.1.5
発電制動時の動作 . . . . . . . . . . . . . . . . . . . . . . . . . . .
73
デューティ比制御 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
74
5.2.1
スイッチングシーケンス . . . . . . . . . . . . . . . . . . . . . . .
74
5.2.2
制御ブロック . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
76
位相シフト制御 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
77
5.3.1
直流電圧均一回路のモデリング . . . . . . . . . . . . . . . . . . .
77
5.3.2
正側・負側間のパワーフローの解析 . . . . . . . . . . . . . . . . .
78
5.3.3
位相シフト制御の導入法 . . . . . . . . . . . . . . . . . . . . . . .
82
実験結果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
82
5.4.1
実験システム構成 . . . . . . . . . . . . . . . . . . . . . . . . . . .
82
5.4.2
位相シフト制御の効果 . . . . . . . . . . . . . . . . . . . . . . . .
83
5.4.3
誘導機駆動時の実験結果 . . . . . . . . . . . . . . . . . . . . . . .
84
5.4.4
漏れインダクタンス変化時のリプル電流幅 . . . . . . . . . . . . .
85
インダクタ体積の比較 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
86
5.5.1
Area Product による評価 . . . . . . . . . . . . . . . . . . . . . . .
87
5.5.2
先行回路と提案回路の比較 . . . . . . . . . . . . . . . . . . . . . .
89
4 レベルダイオードクランプ PWM インバータへの応用 . . . . . . . . .
93
目次
iv
5.7
第 5 章まとめ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
第 6 章 低速・定格トルク運転への応用
6.1
6.2
6.3
6.4
6.5
6.6
6.7
95
低速・定格トルク運転における問題点 . . . . . . . . . . . . . . . . . . .
95
6.1.1
電力回生の不要な定トルク負荷の用途
. . . . . . . . . . . . . . .
95
6.1.2
結合インダクタの磁束脈動 . . . . . . . . . . . . . . . . . . . . . .
96
6.1.3
IGBT モジュール損失不均一 . . . . . . . . . . . . . . . . . . . . .
98
零相電圧重畳による特性改善 . . . . . . . . . . . . . . . . . . . . . . . .
98
6.2.1
結合インダクタの磁束脈動低減 . . . . . . . . . . . . . . . . . . .
99
6.2.2
零相電圧の次数 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
99
6.2.3
9 次零相電圧の振幅と節点電流
. . . . . . . . . . . . . . . . . . . 101
直流電圧均一回路の制御 . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
6.3.1
磁束の振幅低減 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
6.3.2
∆D 増加時の巻線電流 . . . . . . . . . . . . . . . . . . . . . . . . 106
実験結果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
6.4.1
実験条件 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
6.4.2
定常状態における実験結果 . . . . . . . . . . . . . . . . . . . . . . 108
6.4.3
負荷トルク急変時の実験結果 . . . . . . . . . . . . . . . . . . . . 108
9 次零相電圧重畳時のパワーデバイス損失 . . . . . . . . . . . . . . . . . 109
6.5.1
5 レベルインバータの損失解析法 . . . . . . . . . . . . . . . . . . 109
6.5.2
直流電圧均一回路の損失解析法 . . . . . . . . . . . . . . . . . . . 110
6.5.3
5 レベルインバータの IGBT モジュール損失解析結果 . . . . . . . 113
6.5.4
システム全体の損失解析結果 . . . . . . . . . . . . . . . . . . . . 113
過変調域の IGBT モジュール損失 . . . . . . . . . . . . . . . . . . . . . . 114
6.6.1
3 次零相電圧重畳法 . . . . . . . . . . . . . . . . . . . . . . . . . . 114
6.6.2
改良零相電圧重畳法 . . . . . . . . . . . . . . . . . . . . . . . . . 115
6.6.3
シミュレーション結果 . . . . . . . . . . . . . . . . . . . . . . . . 115
第 6 章まとめ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
第 7 章 結論
7.1
94
131
本研究の成果 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
目次
v
7.2
今後の課題 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
付録
135
参考文献
137
発表論文
155
謝辞
159
vii
表目次
2.1
3 レベルフライングキャパシタ変換器の出力電圧とスイッチ S1 ∼ S4 の状態 15
2.2
高圧モータドライブの用途 . . . . . . . . . . . . . . . . . . . . . . . . . .
24
2.3
MMCC-DSCC を用いた 6.6 kV 高圧モータドライブ構成例 . . . . . . . .
34
3.1
出力電圧とスイッチ S1 ∼ S8 の状態 . . . . . . . . . . . . . . . . . . . . .
36
3.2
転流時のスイッチング・リカバリ損失発生素子 (iO > 0) . . . . . . . . . .
40
3.3
転流時のスイッチング・リカバリ損失発生素子 (iO < 0) . . . . . . . . . .
40
4.1
定格と回路定数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
61
4.2
図 4.8–4.10 における各分圧コンデンサ電圧直流平均値 . . . . . . . . . . .
62
5.1
定格と回路定数 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
84
5.2
結合インダクタの定数 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
85
5.3
インバータ出力電力
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
87
5.4
図 5.18–5.20 における各分圧コンデンサ電圧直流平均値 . . . . . . . . . .
87
6.1
損失解析で用いる回路定数 . . . . . . . . . . . . . . . . . . . . . . . . . . 111
ix
図目次
2.1
高圧システム用変換器の分類 [63] . . . . . . . . . . . . . . . . . . . . . .
12
2.2
3 レベルダイオードクランプ (NPC) 変換器 [36] . . . . . . . . . . . . . .
13
2.3
4 レベル・5 レベルダイオードクランプ形変換器 . . . . . . . . . . . . . .
14
2.4
3 レベルフライングキャパシタ変換器 . . . . . . . . . . . . . . . . . . . .
15
2.5
vO = 0 の場合の 2 つの動作モード . . . . . . . . . . . . . . . . . . . . . .
16
2.6
4 レベル・5 レベルフライングキャパシタ形変換器 . . . . . . . . . . . . .
17
2.7
MMCC の用語と分類 [94] . . . . . . . . . . . . . . . . . . . . . . . . . .
17
2.8
モジュラー・マルチレベル・カスケード変換器 (MMCC) Single-Star Bridge-
Cells (SSBC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.9
18
モジュラー・マルチレベル・カスケード変換器 (MMCC) Single-Delta
Bridge-Cells (SDBC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
18
2.10 二重スター結線のモジュラー・マルチレベル・カスケード変換器 (MMCC) 19
2.11 T-type NPC インバータ [36] . . . . . . . . . . . . . . . . . . . . . . . . .
20
2.12 3 レベルアクティブ NPC (ANPC) インバータ [75] . . . . . . . . . . . . .
21
2.13 5 レベルアクティブ NPC (ANPC) インバータ [76] . . . . . . . . . . . . .
21
2.14 3 レベルダイオードクランプ変換器にフルブリッジ変換器を接続した回路
構成 [81] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
2.15 モータドライブの基本構成 . . . . . . . . . . . . . . . . . . . . . . . . . .
23
2.16 三相多パルスダイオード整流器 . . . . . . . . . . . . . . . . . . . . . . .
25
2.17 6 パルスダイオード整流器用ハイブリッドフィルタ [69, 70] . . . . . . . .
26
2.18 12 パルスダイオード整流器用ハイブリッドフィルタ [71] . . . . . . . . .
27
2.19 3 レベル PWM 整流器・インバータを用いたモータドライブシステム . .
28
2.20 多巻線変圧器を用いた高圧モータドライブ [27] . . . . . . . . . . . . . . .
29
2.21 3 レベルインバータを Y 接続した高圧モータドライブ [88–90] . . . . . .
30
図目次
x
2.22 マトリクスコンバータを多重接続した高圧モータドライブ [91, 92] . . . .
31
2.23 MMCC-SSBC と双方向絶縁型 DC/DC コンバータを用いた高圧モータド
ライブ [107] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
32
2.24 MMCC-DSCC を用いた高圧モータドライブ . . . . . . . . . . . . . . . .
33
3.1
5 レベルダイオードクランプインバータの 1 相分の構成 . . . . . . . . . .
36
3.2
iO > 0 の場合動作モード . . . . . . . . . . . . . . . . . . . . . . . . . . .
37
3.3
iO < 0 の場合動作モード . . . . . . . . . . . . . . . . . . . . . . . . . . .
38
3.4
キャリア波と相電圧指令値 e∗ . . . . . . . . . . . . . . . . . . . . . . . .
41
3.5
分圧不均一の原理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
42
3.6
PWM 整流器を使用した場合 (BTB) . . . . . . . . . . . . . . . . . . . . .
44
3.7
ダイオード整流器を使用した場合 . . . . . . . . . . . . . . . . . . . . . .
45
3.8
直流電流均一回路を付加した構成 . . . . . . . . . . . . . . . . . . . . . .
46
3.9
2 台のチョッパ回路を用いた直流電圧均一回路 [50] . . . . . . . . . . . .
47
3.10 節点電流 IP1 の理論解析 . . . . . . . . . . . . . . . . . . . . . . . . . . .
49
3.11 2 乗低減トルク負荷の IP1 -MI 特性 . . . . . . . . . . . . . . . . . . . . . .
50
3.12 6.6 kV 1 MW トランスレス・モータドライブシステムの構成例 . . . . .
52
3.13 6.6 kV 10 MW モータドライブシステム (22 kV 受電) の構成例 . . . . . .
53
4.1
クランプダイオードを付加した直流電圧均一回路 . . . . . . . . . . . . .
56
4.2
直流電圧均一回路のスイッチングシーケンス (正側) . . . . . . . . . . . .
56
4.3
各 period における動作状態 . . . . . . . . . . . . . . . . . . . . . . . . .
57
4.4
直流電圧均一回路制御ブロック . . . . . . . . . . . . . . . . . . . . . . .
59
4.5
200-V 5.5-kW 実験システム . . . . . . . . . . . . . . . . . . . . . . . . .
60
4.6
コレクタ–エミッタ間電圧 vCE1 , vCE2 実験波形 . . . . . . . . . . . . . . .
63
4.7
インダクタ電流直流平均値 – ∆D 特性 . . . . . . . . . . . . . . . . . . .
64
4.8
MI = 1.15 における実験波形 . . . . . . . . . . . . . . . . . . . . . . . . .
65
4.9
MI = 0.8 における実験波形 . . . . . . . . . . . . . . . . . . . . . . . . .
66
4.10 MI = 0.5 における実験波形 . . . . . . . . . . . . . . . . . . . . . . . . .
67
5.1
5.2
結合インダクタを用いた直流電圧均一回路を設置したモータドライブシ
ステム . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
70
直流電圧均一回路の基本的な動作モード . . . . . . . . . . . . . . . . . .
71
図目次
xi
5.3
巻線の印加電圧に着目した結合インダクタの等価回路 . . . . . . . . . . .
72
5.4
インダクタ内の磁束 Φ . . . . . . . . . . . . . . . . . . . . . . . . . . . .
72
5.5
直流電圧均一回路のスイッチングシーケンス . . . . . . . . . . . . . . . .
74
5.6
8 つの period のおける直流電圧均一回路の動作モード . . . . . . . . . . .
75
5.7
デューティ比制御ブロック線図 . . . . . . . . . . . . . . . . . . . . . . .
76
5.8
双方向ハーフブリッジ DC/DC コンバータと見なした回路構成 . . . . . .
78
5.9
IGBT の飽和電圧とダイオードの順電圧降下を考慮した等価回路 (ℓ = ℓP +ℓN ) 78
5.10 位相シフトのない場合のスイッチングシーケンスと理論波形 . . . . . . .
79
5.11 位相シフト導入時のスイッチングシーケンスと理論波形 . . . . . . . . . .
80
5.12 位相シフト制御の導入法 . . . . . . . . . . . . . . . . . . . . . . . . . . .
81
5.13 位相シフト制御ブロック線図 (T = 32 ms, K = 0.05 rad/V) . . . . . . .
81
5.14 200 V 5.5 kW 実験システム . . . . . . . . . . . . . . . . . . . . . . . . .
83
5.15 実験で用いた結合インダクタ
. . . . . . . . . . . . . . . . . . . . . . . .
85
5.16 正側と負側の電圧偏差 Vdif . . . . . . . . . . . . . . . . . . . . . . . . . .
86
5.17 節点 M-N2 間に 500 Ω の抵抗を接続した場合の電圧偏差 . . . . . . . . .
86
5.18 MI = 1.15, f = 57.5 Hz, PO = 4.7 kW における実験波形 . . . . . . . . .
88
5.19 MI = 0.8, f = 40 Hz and PO = 1.6 kW における実験波形 . . . . . . . . .
89
5.20 MI = 0.5, f = 25 Hz and PO = 0.39 kW における実験波形 . . . . . . . .
90
5.21 漏れインダクタンス ℓP = ℓN = 0.7 mH とした場合 . . . . . . . . . . . . .
91
5.22 漏れインダクタンス ℓP = ℓN = 1.4 mH とした場合 . . . . . . . . . . . . .
91
5.23 Area Product の定義 . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
92
5.24 4 レベルインバータを用いたモータドライブシステムと直流電圧均一回路
94
6.1
主回路構成と節点電流の定義
. . . . . . . . . . . . . . . . . . . . . . . .
96
6.2
節点電流と磁束の関係 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
98
6.3
相電圧指令値 e∗ と各節点のデューティ比 DP2 ∼ DN2 . . . . . . . . . . .
98
6.4
節点 P1 の相毎の通電率 . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
6.5
キャリア波と MI = 0.25 における相電圧指令値 e∗ . . . . . . . . . . . . . 101
6.6
重畳可能な 9 次零相電圧振幅の最大値 A9max . . . . . . . . . . . . . . . . 102
6.7
9 次零相電圧重畳時の節点電流 IP1 理論解析 . . . . . . . . . . . . . . . . 103
6.8
直流電圧均一回路のスイッチングシーケンスと各 period の時間幅の定義
6.9
Period 3 と 7 の動作モード . . . . . . . . . . . . . . . . . . . . . . . . . . 105
104
xii
図目次
6.10 巻線電圧 vwind と磁束の関係 . . . . . . . . . . . . . . . . . . . . . . . . . 105
6.11 同期発電機 (SG) と負荷抵抗の接続 . . . . . . . . . . . . . . . . . . . . . 107
6.12 零相電圧を重畳しない場合の定常状態における実験波形 (MI = 0.25,
f = 10 Hz,PO = 920 W,∆D = 0.1) . . . . . . . . . . . . . . . . . . . . 117
6.13 9 次零相電圧を重畳した場合の定常状態における実験波形 (MI = 0.25,
f = 10 Hz,PO = 920 W,∆D = 0.1) . . . . . . . . . . . . . . . . . . . . 118
6.14 9 次零相電圧を重畳した場合の定常状態における実験波形 (MI = 0.25,
f = 10 Hz,PO = 920 W,∆D = 0.5) . . . . . . . . . . . . . . . . . . . . 119
6.15 零相電圧を重畳しない場合の負荷トルク急変時における実験波形 (MI =
0.25,f = 10 Hz,∆D = 0.1) . . . . . . . . . . . . . . . . . . . . . . . . 120
6.16 9 次零相電圧を重畳した場合の負荷トルク急変時における実験波形 (MI =
0.25,f = 10 Hz,∆D = 0.1) . . . . . . . . . . . . . . . . . . . . . . . . 121
6.17 9 次零相電圧を重畳した場合の負荷トルク急変時における実験波形 (MI =
0.25,f = 10 Hz,∆D = 0.5) . . . . . . . . . . . . . . . . . . . . . . . . 122
6.18 損失解析シミュレーション回路 . . . . . . . . . . . . . . . . . . . . . . . 123
6.19 IGBT モジュールとクランプダイオードの名称定義 . . . . . . . . . . . . 124
6.20 直流電圧均一回路の損失解析モデル . . . . . . . . . . . . . . . . . . . . . 124
6.21 IGBT モジュールの損失分布 . . . . . . . . . . . . . . . . . . . . . . . . . 125
6.22 IGBT モジュール S1 & D1 ∼ S4 & D4 合計の損失 . . . . . . . . . . . . . . 126
6.23 クランプダイオードの損失合計 . . . . . . . . . . . . . . . . . . . . . . . 126
6.24 直流電圧均一回路の損失 . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
6.25 インバータと直流電圧均一回路の損失和 . . . . . . . . . . . . . . . . . . 127
6.26 3 次零相電圧重畳時の相電圧指令値 vu∗ , vv∗ , vw∗ . . . . . . . . . . . . . . . 128
6.27 改良零相電圧重畳法適用時の相電圧指令値 vu∗ , vv∗ , vw∗ . . . . . . . . . . . 128
6.28 MI = 1.1, f = 50 Hz におけるシミュレーション波形 . . . . . . . . . . . 129
6.29 過変調域の IGBT モジュール損失分布 . . . . . . . . . . . . . . . . . . . 129
1
第1章
序論
1.1
1.1.1
研究背景
パワーエレクトロニクスの技術発展
1957 年に米国 General Electric 社によって実用化されたサイリスタ (商品名 SCR:
Silicon Controlled Rectifier) の出現は,パワーエレクトロニクスの原点として知られて
いる。サイリスタは電気的にオン制御できるスイッチに過ぎない。このような単純な素
子がパワーエレクトロニクスという分野を開いた理由は,低損失・高速かつ無接点とい
う特長にある [1]。サイリスタ登場以前にオン制御素子として利用されていた水銀整流
器はオン電圧降下が 20 V 程度あるのに対し,サイリスタのオン電圧降下は 1.5 V 程度
であり大幅な損失低減が実現した。また,機械的接点を有する電磁リレーでは,オン電
圧降下は零と見なせるが,オン・オフできる回数に限界があり高速なスイッチングは不
可能である。サイリスタは無接点ゆえにオン・オフの回数に制限がないため,高速動作
が可能であるだけでなく信頼性が高い。このような低損失かつ高速のスイッチングの実
現がパワーエレクトロニクスの発展を導いた。
パワーエレクトロニクスの黎明期はその定義が曖昧であり,1 つの学際分野としては
認知されていなかった。1973 年に開催された第 1 回 IEEE Power Electronics Specialist
Conference (PESC) の基調講演において,W. E. Newell はパワーエレクトロニクスを電
子工学 (electronics)・電力工学 (power)・制御工学 (control) にまたがる技術分野として
技術者・研究者に分野強調を求めた [2]。この提言によって,今日ではパワーエレクトロ
ニクスが学際分野の 1 つとして定着している。彼は電力制御システムの効率・制御性・
信頼性・応答性の向上に電力用パワーデバイスの使用が必要不可欠であると主張してい
第1章
2
序論
る。また,計算機ベースの回路および半導体の解析技術の発展や,自己消弧素子の普及
などを予言している。
Newell の提言を裏付けるかのように,パワーエレクトロニクスは発展を遂げた。特
に,パワーデバイスの高性能化がその発展を推進した。ゲートからアノード電流の一部
を引き抜くことで自己消弧可能とした GTO (Gate Turn-Off) サイリスタの研究・開発が
進められ,1980 年頃には 2.5 kV 2 kA 定格の GTO サイリスタが実用化した [3]。GTO
サイリスタの実用にともない高圧モータドライブ用インバータなどの研究・開発が進
められた [5]。1990 年代中盤には GTO サイリスタを改良した GCT (Gate Commutated
Thyristor) が実用化された [6, 7]。これは,GTO サイリスタに比べ高速なスイッチング
が可能であり,かつスナバ回路を必要としないため低損失である。
GTO サイリスタや GCT などのサイリスタを発展させたパワーデバイスの実用化の一
方で,トランジスタをベースとしたパワーデバイスの研究・開発も進められた。1970 年
代後半には 200 V モータドライブ用に 450 V 50 A 定格のバイポーラトランジスタ (BJT:
Bipolar Junction Transistor) が製品化され [8],その後 1000 V 定格の BJT も実用化され
た [3]。BJT は電流駆動形素子であるため,ベース駆動電力が無視できない場合がある。
一方で,MOSFET(Metal-Oxide-Semiconductor Field-Effect Transistor) もパワーデバイ
スとして利用可能となった。MOSFET は電圧駆動素子であるため,ゲート駆動電力が
BJT のベース駆動電力と比較して極めて小さい。また,BJT よりも高速なスイッチン
グが可能である。しかし,MOSFET のオン抵抗は耐圧の 2 乗に比例するため,高耐圧
化が難しい。現在実用化されている MOSET の耐圧は 30 ∼ 600 V 程度である。
1980 年代中盤には BJT と MOSFET の長所を両立した IGBT (Insulated-Gate Bipolar
Transistor) が実用化された [4, 9]。IGBT は電圧駆動素子であるため,MOSFET と同様
にゲート駆動電力が小さい。また,600 V 以上の高耐圧化も可能である。200 V/400 V
低圧用の汎用インバータを始め,BJT が採用されていた分野は IGBT に取って代わった。
IGBT の高耐圧化が進むにつれて,GCT が採用される大容量の変換器を除き,鉄道車両
駆動や高圧モータドライブなどの GTO サイリスタが利用されていた分野でも IGBT が
使用されるようになった。現在では,数 kVA までの容量では MOSFET が,数 kVA か
ら数 10 MVA の容量では IGBT が,数 10 MVA を超える容量では GCT が用いられて
いる。自己消弧素子の普及にともない,回路方式も主流は他励式から自励式に取って代
わった。
制御工学の分野においては,アナログ制御器から DSP (Digital Signal Processor) や
1.1 研究背景
3
FPGA (Field Programmable Gate Array) を用いたディジタル制御器に置き代わった。
これは,アナログ制御器で課題であったオフセットの除去やノイズ低減を実現しただけ
でなく,汎用性と再現性の向上にも寄与した [10]。ディジタル制御器ではソフトウェア
で容易に制御系を変更できるため,多様な制御法の適用を促進し,パワーエレクトロニ
クス技術の制御性向上に大きく貢献している。
1.1.2
交流電動機の可変速駆動
交流電動機 (同期電動機・誘導電動機) は直流電動機と比較して,ブラシや整流子等の
摩耗・接触通電部分がないため保守が簡単で信頼性が高い。また構造が堅牢であり大容
量化も容易である [11–13]。直流電動機は遠心力や整流子片間の耐圧の制限から,定格
回転数と定格出力の積が 2 ∼ 4 GW · rpm 程度が限界であるのに対して,交流電動機の
定格回転数と定格出力の積の限界は 200 ∼ 400 GW · rpm 程度であるとされる [12]。交
流電動機に適切な制御を導入することで,直流電動機では不可能であった大容量かつ高
速な可変速駆動システムが実現できる。
しかし,直流電動機は電機子電圧または電機子電流を調整することで,回転数または
トルクを容易に制御できる一方で,交流電動機の回転数は一次周波数に依存するため可
変速駆動が困難であった。誘導電動機に関しては,一次電圧制御や二次抵抗制御等に
よって一次周波数固定のまま可変速駆動する手法もあるが,損失が増加するだけでなく
制御性も低く用途が限定されていた。このような理由から,可変速でかつ高速な制御性
を必要とする用途では直流電動機が,固定速駆動の用途では交流電動機が採用されてい
た。直流電動機と同等の優れた制御性を交流電動機,特に誘導電動機によって実現する
ことが理想的であった [14]。誘導電動機の高効率かつ高精度な可変速駆動の実現には周
波数制御による運転が必要不可欠であった。
パワーエレクトロニクスの発展は交流電動機の高精度・高効率な可変速駆動を可能に
した。サイリスタを用いた負荷転流形・強制転流形インバータやサイクロコンバータの
研究・開発が進み,1970 年頃には周波数制御による可変速駆動が実用期を迎えた [14]。
さらに,自己消弧素子 (GTO サイリスタ,GCT,IGBT など) の定格電圧・電流の上昇
によって,自励式インバータを用いた高圧・大容量の交流電動機可変速駆動が実現して
いる。
インバータによる交流電動機可変速駆動の黎明期はオープンループでの電圧/周波数
第1章
4
序論
比 (V /F ) 一定制御や,すべり周波数制御などが採用されていた。しかし,いずれも誘導
電動機の定常状態を仮定した理論式を用いた制御法であり,過渡状態までは考慮されて
いなかった。それゆえ,ファン・ブロワなどの回転数の変化幅が狭く,高速な応答を必
要としない単純可変速用途がほとんどであった。この制約を解消するため,回転数とト
ルクを高速に制御可能なベクトル制御の研究が活発に行われた [14–16]。ベクトル制御
は 1968 年に Hasse がその原理を発表し [15],1971 年に Blaschke が磁束軸基準の概念で
明確にした [16]。日本国内においては,1979 年に抄紙機およびスーパカレンダ設備用と
して初めて誘導電動機のベクトル制御が実用化された [17–19]。さらに,交流電動機の
入力電圧・電流量から回転速度を演算することで,速度検出器を用いずにベクトル制御
を実現する,いわゆるセンサレスベクトル制御も実用化されている [20–22]。
インバータによる周波数制御の実現だけでなく,ベクトル制御の確立によって,交流
電動機は直流電動機と同等の制御特性を有し,かつ大容量の可変速駆動システムを実現
可能となった。この背景には,インバータを構成するパワーデバイスの性能向上だけで
なく,ディジタル制御技術の発展も寄与している。それまで直流電動機が用いられてい
た応用は次第にインバータによる誘導電動機駆動に置き換えられた。例えば,東海道新
幹線の車両駆動は 100 系まで直流電動機が用いられていたが,1990 年に登場した 300 系
では誘導電動機が採用された [13]。現在では新幹線車両のほとんどが誘導電動機を使用
している。一方で,ファン・ブロワ・ポンプ等の風量・水量制御に関しては,従来は誘導
電動機による固定速運転が一般的であった。インバータによる可変速駆動の導入によっ
て,大幅な省エネルギーが実現された。特に,1973 年の石油危機以後は可変速駆動によ
る省エネルギー効果が注目され,新設・既設の誘導電動機のインバータドライブの適用
が進んだ [14]。
1.1.3
高圧モータドライブシステムとその技術課題
高圧モータドライブシステム注 1 の研究・開発の黎明期には電流形インバータが広く採
用された [5, 24–26]。これは,電流形インバータが電圧形インバータに比べ過電流と短絡
時の保護の観点から高い信頼性を有しているためである [26]。1970 年代にはサイリスタ
を用いた強制転流電流形インバータ (直列ダイオード方式) による可変速ドライブシステ
注1
本論文ではことわりのない限り,
「モータ」は交流電動機を,
「モータドライブ」は交流電動機駆動
を指す。
1.1 研究背景
5
ムの研究・開発が進められた [24]。その後 1980 年代には電流形 GTO インバータの研
究・開発が進められた。自己消弧素子である GTO サイリスタの採用によって転流回路
が不要になった。
1990 年代中盤,米国 Robicon 社は商用周波数 (50 Hz/60 Hz) の多巻線・多相変圧器と
複数のパワーセルを用いた高圧モータドライブシステムを開発・実用化した [27]。各パ
ワーセルは三相ダイオード整流器と電圧形単相フルブリッジインバータで構成され,単
相フルブリッジインバータの出力端を Y 結線でカスケード接続することにより出力変
圧器を用いずにモータを駆動する。また多巻線商用変圧器は多相の構造であるため,各
パワーセルの三相ダイオード整流器が発生する電源高調波電流を低減できる。単相フル
ブリッジインバータを構成するパワーデバイスには IGBT が採用されている。国内の電
機各社もこの回路方式を用いた 6.6 kV/3.3 kV モータドライブシステムを製品化してい
る [28–35]。現在ではファン・ブロワ・ポンプの風量・水量制御を始め,回生の必要ない
用途に広く利用されている。2000 年代に入り,鉄鋼圧延主機などの回生の必要な用途を
対象とした 3 レベル整流器・インバータを利用した 3.3 kV モータドライブシステムが
開発された [37, 39]。
高圧モータドライブシステムの技術課題は小型化・軽量化・低コスト化である。商用
周波数変圧器はシステム全体の重量・体積の大部分を占有する。特に,前述の Robicon
社が開発したモータドライブシステムで用いる多巻線・多相変圧器は千鳥結線を必要と
するため,一般的な ∆-∆ や ∆-∆-Y などの巻線構造の単純な変圧器に比べ同一の容量で
もコストが割高となるだけでなく,故障率が上昇する。さらに,変圧器とパワーセルを
接続するケーブル数が変圧器の巻線の数だけ必要であり,ケーブルの重量が増加する。
したがって,高圧モータドライブシステムの小型化・軽量化・低コスト化を実現するた
めには商用周波数変圧器を用いない,
「トランスレス」の構成であることが望ましい。た
だし,6.6 kV 配電系統の容量が 2 MVA 程度に制限されるため,それを超える電力定格
の高圧モータドライブシステムでは 22 kV 以上の送電系統からの受電となる。電圧整
合の観点から商用周波数変圧器が必要不可欠である。トランスレスは実現不可能ではあ
るが,低コスト化・信頼性向上の観点から ∆-∆-Y など単純な巻線構造の変圧器が望ま
しい。トランスレス化,単純な巻線構造の変圧器の採用,どちらの実現においてもイン
バータ (変換器) の高耐圧化が必要不可欠である。それゆえ,高耐圧化が可能なマルチレ
ベル変換器の高圧モータドライブへの適用が期待されている。
第1章
6
1.1.4
序論
5 レベルダイオードクランプ PWM インバータ
1970 年代後半に発明された 3 レベルダイオードクランプ PWM インバータ [36]注 2 は,
マルチレベル変換器の研究・開発の出発点である。3 レベルダイオードクランプ PWM
インバータ (以下,3 レベルインバータと略す。) は従来の 2 レベルインバータと比較し
て,同一の耐圧のパワーデバイスを使用する場合 2 倍の高耐圧化が達成できる。また直
流リンク電圧が同一の条件であれば,出力電圧が 1/2 の電圧ステップとなるため,低歪
みであり,かつサージ電圧の低減が期待できる。現在では,3 レベルインバータの回路構
成・制御法は確立し実用化に至っている。以下に 3 レベルインバータの実用化例を示す。
• 鉄鋼圧延主機ドライブ [37–39]
• 新幹線 (700 系,N700 系) 等の鉄道車両駆動 [40]
• 鉄道車両用静止形補助電源装置 [41, 42]
• UPFC(Unified Power Flow Controller: 統合電力潮流制御装置) [43]
• STATCOM(STATic synchronous COMpensator: 自励式無効電力補償装置) [44,45]
• 風力発電用パワーコンディショナ [46]
• 汎用インバータ [47]
近年,3 レベルを超えるレベル数のマルチレベル変換器の研究・開発が注目されてい
る [50–65, 76–82, 94–106, 109, 110, 113]。レベル数の増加はさらなる高耐圧化と出力電圧
歪みの低減に寄与するため,特に高圧電力変換システムへの応用が期待されている。3
レベルインバータを発展させた回路方式である 5 レベルダイオードクランプ PWM イ
ンバータ [50–65] (以下,5 レベルインバータと略す。) は 3 レベルインバータと比較し
て,同耐圧のパワーデバイスを用いて 2 倍の高耐圧化を達成する。1990 年代には 4.5
kV GTO サイリスタを用いた 5 レベルインバータの研究がなされたが [51, 54],実用化
には至らなかった。この理由の一つに,4.5 kV GTO サイリスタはスイッチング損失・
スナバ損失が大きいため,実用上のスイッチング周波数が低いことが挙げられる。近
年,4.5 kV / 6.5 kV IGBT や 6 kV GCT など GTO よりも高速かつ低損失なパワーデ
バイスの開発・実用化によって 5 レベルインバータが再び注目されている。現行の高耐
圧 IGBT(4.5 kV または 6.5 kV IGBT) を用いて 5 レベルインバータを構成すると,イン
注2
文献 [36] では NPC(中性点クランプ) インバータと呼んでいるが,フライングキャパシタインバー
タ [93] と区別するため,本論文ではダイオードクランプインバータと呼ぶことにする。
1.2 本論文の目的
7
バータを多重化することなく 6.6 kV モータを直接駆動できるだけでなく,6.6 kV 系統
からの直接受電が可能となる [60, 61]。それゆえ,高圧モータドライブシステムのトラン
スレス化あるいは巻線構造の単純な変圧器 (∆-∆-Y など) の採用が実現できる。多巻線・
多相変圧器を用いた現行の高圧モータドライブシステムと比較し [27],大幅な小型化と
低コスト化が期待できる。
しかし,5 レベルインバータでは直流リンク電圧の分圧不均一が問題となる。この分
圧不均一とは,直流リンクの 4 台の分圧コンデンサ電圧の直流平均値が等しくならない
現象であり,周期的な電圧変動を対象としているのではない [52]。5 レベルインバータの
スイッチングモードの自由度を用いて分圧不均一を抑制する方法が報告されているが,
抑制可能な出力電圧範囲 (インバータ変調率) に制約が存在し,特に負荷力率 1 付近で
は変調率 0.55 程度までしか分圧不均一を抑制できない [62]。一方,5 レベル PWM 整流
器・インバータの回路構成では,PWM 制御を工夫することで分圧不均一を抑制する手
法も研究されている [65]。この手法では分圧不均一だけでなく,電源高調波電流の抑制
も可能である。しかし,整流器容量はインバータと等しく,使用するスイッチング素子
数も 2 倍となるため,損失とコストの増加が問題となる。ファン・ブロワ・ポンプなど
多くの負荷では回生動作を必要としないため,PWM 整流器よりも高効率・高信頼かつ
安価なダイオード整流器の使用が望ましい。ダイオード整流器が発生する電源高調波電
流は,トランスレス・ハイブリッドフィルタの併用で抑制可能である [67–71]。しかし,
ダイオード整流器を使用した場合に制約なく分圧不均一を抑制するためには直流電圧均
一回路を必要とする。
1.2
本論文の目的
本論文では,高圧モータドライブシステムの小型化・軽量化・低コスト化を目的とし
て,5 レベルダイオードクランプ PWM インバータを用いたシステムに着目する。5 レ
ベルインバータを高圧モータドライブシステムに応用した場合に必要不可欠である直流
電圧均一回路と,その周辺技術の検討を行う。高圧モータドライブシステムは電力回生
の不要な負荷を対象として,電源側はダイオード整流器を想定する。
直流電圧均一回路の回路方式として 2 台のチョッパ回路を用いた構成が提案されてい
る [50]。しかし,4.5 kV IGBT を用いてチョッパ回路を構成すると,IGBT を 2 直列に
する必要がある。さらに,4.5 kV IGBT のスイッチング周波数が数 100 Hz 程度までに
第1章
8
序論
限定されることから,チョッパインダクタの重量・体積が増大するおそれがある。この
2 つの問題を解決するため,本論文では 2 種類の新しい直流電圧均一回路を提案する。
まず,クランプダイオードを付加した回路構成を提案し,2 直列 IGBT の電圧分担の均
一化を同時スイッチング技術 [114, 115] を用いずに達成する。次に,2 台のチョッパ回路
のインダクタを結合させた回路構成を提案する。これは結合インダクタの各巻線から発
生する直流磁束が相殺することで,インダクタ体積が低減できる点に特長がある。
さらに,ファン・ブロワ等の 2 乗低減トルク負荷だけでなく,定トルク特性の負荷 (以
下,定トルク負荷と称す。) への応用も検討する。定トルク負荷は低速域においても定
格トルクを必要とする点が 2 乗低減トルク負荷とは大きく異なる。そこで,モータ低速
域における定格トルク運転に適した制御法の検討を行う。これよって,本論文で検討す
るモータドライブシステムは回生の不要なすべての負荷に対応可能であることを明らか
にする。
本論文の構成
1.3
本論文は全 7 章で構成されており,各章の内容は以下のとおりである。
第1章
序論(本章)
本論文の背景となる,パワーエレクトロニクスニクスの技術発展と,交流電動機
の可変速駆動および高圧モータドライブシステムの技術動向について述べるとと
もに,本論文の目的を説明する。また,本論文の構成を概説する。
第2章
高圧電力変換システムの技術動向
高圧電力変換システムの技術動向について,変換器と高圧モータドライブの 2 点
から述べる。変換器の高圧化を目的として,マルチレベル変換器の研究が国内外
の研究機関で進められている。マルチレベル変換器の分類と回路構成について述
べ,近年の研究動向について紹介する。次に,高圧モータドライブシステムの回
路構成と実用化例について説明する。特に,米国 Robicon 社が開発した高圧モー
タドライブを始め,多巻線・多相変圧器を用いた既存の高圧モータドライブシス
テムの技術的課題を述べる。マルチレベル変換器・高圧モータドライブ双方の研
究動向・技術的課題と本論文の関連性と相違点について述べ,本論文の位置付け
を明確にする。
1.3 本論文の構成
第3章
9
5 レベルダイオードクランプ PWM インバータの動作原理と技術動向
5 レベルダイオードクランプ PWM インバータの動作原理と分圧不均一の発生原
理について説明するとともに,分圧不均一抑制法の研究動向を概説する。その結
果,電源側にダイオード整流器を用いた場合に制約なく分圧不均一を抑制するた
めには,直流電圧均一回路が必要不可欠であることを示す。また,5 レベルイン
バータを用いた高圧モータドライブの構成例について述べる。
第4章
クランプダイオードを付加した直流電圧均一回路
チョッパ回路を用いた直流電圧均一回路において問題となる,2 直列 IGBT の同
時スイッチングの解消を目的として,クランプダイオードを付加した直流電圧均
一回路を提案する。クランプダイオードを付加した場合のスイッチングモードを
説明し,どの動作モードにおいても 1 つの IGBT の印加電圧が分圧コンデンサ 1
台分となることを示す。200 V 5.5 kW ミニモデル用いた検討によって,その有効
性と分圧不均一の抑制効果を確認する。
第5章
結合インダクタを用いた直流電圧均一回路
直流電圧均一回路の小型化・軽量化を目的として,結合インダクタを用いた直流
電圧均一回路を提案する。基本的な動作原理とスイッチングモードを説明し,結
合インダクタのコア内には直流磁束が生じないことを明らかにする。デューティ
比制御と位相シフト制御を導入することで,定常偏差のない分圧コンデンサ電圧
の均一化を達成できることを示す。特に,位相シフト制御は独立なチョッパ回
路では実現不可能であった中性点電位制御を可能にする。これは,5 レベルイン
バータの制御に頼らず直流電圧均一回路のみですべての分圧コンデンサ電圧を制
御できること意味する。実験により,デューティ比制御と位相シフト制御の有効
性を実証する。また,Area Product を用いたインダクタ体積の定量的な検討を行
い,結合インダクタは 2 台の非結合インダクタに比べ 1/6 程度の体積になること
を明らかにする。
第6章
低速 · 定格トルク運転への応用
定トルク負荷への応用を目的として,5 レベルインバータを用いたモータドライ
ブの低速・定格トルク運転について検討する。低速・定格トルク運転において次
の問題が顕在化する。(1) 直流電圧均一回路の結合インダクタの磁束脈動。(2) 5
第1章
10
序論
レベルインバータの IGBT モジュール損失不均一。この解決のため,5 レベルイ
ンバータに 9 次零相電圧を重畳する手法と,スイッチングシーケンスの自由度を
利用した直流電圧均一回路の制御法を提案する。実験によって磁束脈動の低減効
果を実証し,「PSCAD/EMTDC」を用いたシミュレーションによって IGBT モ
ジュール損失の均一化を確認する。結論として,5 レベルインバータを用いたモー
タドライブシステムは電力回生の不要なすべての負荷に対応できることを明らか
にする。
第7章
結論
本論文における成果を要約し,今後の課題について言及する。
11
第2章
高圧電力変換システムの技術動向
2.1
高圧システム用変換器の分類
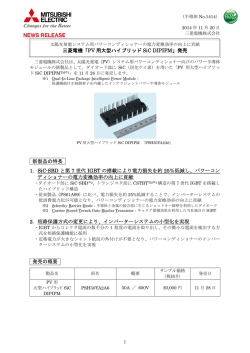
図 2.1 に高圧・大容量変換器の分類を示す [63]。まず,交流/交流直接変換形 (Direct)
と直流リンク (DC-link) を介す間接変換形 (Indirect) の 2 つに分けられる。直接変換形
の代表例としてはサイクロコンバータが挙げられる。サイクロコンバータは高圧・大容
量変換器として最も古くから利用されており,現在でもミルドライブなど 10 MW を超
えるモータドライブに応用されている。サイクロコンバータは原理的に入力力率 1 で運
転できない,高調波電流を流出する,電源周波数の 1/2 ∼ 1/3 程度の周波数までしか運
転できないなどの問題を有する。一方で,マトリクスコンバータも直接形の変換器の 1
つであるが,高圧・大容量の変換器への応用は困難であるため,図 2.1 の分類には含ま
れない。ただし,2.5.3 小節で述べる三相/単相マトリクスコンバータを多重接続した例
を除く。
間接形の変換器は,電流形と電圧形の 2 つに分類できる。電流形変換器 (インバータ)
はサイリスタを用いた負荷転流形 (Load commutated) と,GTO サイリスタなどの自己
消弧素子を用いた PWM 方式に分類できる。負荷転流形は主に同期電動機駆動に用い
られている。これは,同期電動機の誘導起電力によってサイリスタの転流が実現できる
ためである [26]。またサイリスタは自己消弧素子に比べ低コスト・低損失であるため,
負荷転流形は数 10 MW∼100 MW 程度の大容量のモータドライブに応用できる。例え
ば,NASA (the National Aeronautics and Space Administration) の風洞試験装置では
100 MW の同期電動機ドライブに負荷転流形インバータが採用されている [72]。一方で,
自己消弧素子を用いた PWM 方式では,転流を考慮する必要がないため誘導電動機駆
動にも利用される。また入力・出力電流を正弦波に制御可能である。電力定格は単機で
第 2 章 高圧電力変換システムの技術動向
12
Medium-voltage
high-power converter
Indirect
(DC-link)
Direct
Cycroconverter
Current source
Load
commutated
PWM
current source
Diode-clamped
Voltage source
Multilevel
Flying-capacitor
High-power
two-level
Modular-multilevel
cascade (MMCC)
図 2.1: 高圧システム用変換器の分類 [63]
1 ∼ 10 MW であり,並列多重化によってさらなる大容量化が実現できる。
電圧形変換器 (インバータ) は 2 レベルとマルチレベルに分類できる。2 レベル変換器
はパワーデバイスを多直列にすることで高圧・大容量の変換器に応用できるが,多直列
にしたパワーデバイスの電圧分担の均一化が課題となる [114, 115]。また,dv/dt の高い
スイッチング波形を引き起こす。
マルチレベル変換器は 2 レベル変換器と比べ 1 つのパワーデバイスに印加される電圧
が低減できるため,高圧化に適している。次節で述べるようにマルチレベル変換器はダ
イオードクランプ形,フライングキャパシタ形,モジュラー・マルチレベル・カスケー
ド変換器 (MMCC)注 1 に分類できる。
注1
文献 [63] では,カスケード形 (Cascaded H-Bridge) として分類されているが,2.2.3 小節で述べる
理由から,本論文ではモジュラー・マルチレベル・カスケード変換器 (MMCC) という用語で統一
している。
2.2 マルチレベル変換器
13
Vdc P
S1
Dc1
0
S2
Vdc
vO
M
Dc2
vO
∗
(reference)
vO
S3
0
S4
−Vdc N
−Vdc
(a) 回路構成
(b) 出力電圧波形
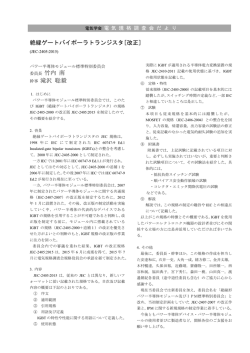
図 2.2: 3 レベルダイオードクランプ (NPC) 変換器 [36]
2.2
2.2.1
マルチレベル変換器
ダイオードクランプ形
図 2.2 に 3 レベルダイオードクランプ変換器 (NPC インバータ) の 1 相分の回路構成
と出力電圧波形を示す。直流リンクには 2 台の分圧コンデンサを設置し中性点 (節点 M)
を設けることで,3 レベルの電圧波形を出力する。上アーム・下アームともに 2 直列の
素子 (S1 と S2 ,S3 と S4 ) で構成されているが,クランプダイオード Dc1 と Dc2 が接続さ
れていることで 1 つの素子の印加電圧を分圧コンデンサ 1 台分にできる。したがって,
1 つの素子の印加電圧は直流リンク電圧の 1/2 であるため,同耐圧の素子を用いた場合
に 2 レベル変換器の 2 倍の電圧定格を実現できる。
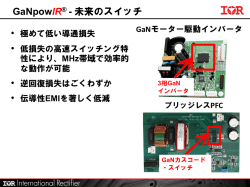
図 2.3 に 3 レベルダイオードクランプ変換器を拡張した,4 レベルおよび 5 レベルダイ
オードクランプ変換器の回路構成を示す。4 レベルの構成では 3 台の分圧コンデンサを,
5 レベルでは 4 台の分圧コンデンサを設置している。分圧コンデンサの増加にともない,
クランプダイオードは必要数が増えるだけでなく,印加電圧も素子によって異なる。4
レベル構成の節点 P1 から接続されるクランプダイオードは,上アーム側に至る Dc1 の
印加電圧が分圧コンデンサ 1 台分であるのに対し,下アーム側へ至る Dc3 の印加電圧は
最大で分圧コンデンサ 2 台分に達する。これは,S5 と S6 がオン状態の場合,Dc3 には
節点 P1–N2 間の電圧が印加されるためである。したがって,スイッチ S1 ∼ S4 と同耐圧
第 2 章 高圧電力変換システムの技術動向
14
P2
S1
Dc1
P1
P2
S1
Dc1
P1
Dc4
×3
S2
Dc2
×2
S3
S2
Dc2
×2
S3
Dc3
×3
M
S4
N1
N1
Dc4
S5
S6
N2
(a) 4 レベル
vO
S5
vO
Dc3
×2
S4
Dc5
×2
S6
Dc6
S7
S8
N2
(b) 5 レベル
図 2.3: 4 レベル・5 レベルダイオードクランプ形変換器
のダイオードを用いるのであれば 2 直列にする必要がある。節点 N1 から接続するクラ
ンプダイオードも同様に,上アーム側に至る Dc2 は 2 直列にする必要がある。つまり,
内側の各節点 P1,N1 からそれぞれ 3 つのクランプダイオードが接続される。5 レベル
の構成も同様に,スイッチ S1 ∼ S4 と同耐圧のダイオードを使用する場合,節点 P1 か
らは上アーム側に単一の素子 (Dc1 ) を,下アーム側に 3 直列の素子 (Dc3 ) を接続する必
要がある。節点 M では上アーム側に 2 直列の素子 (Dc2 ),下アーム側にも 2 直列の素子
(Dc5 ) が必要である。節点 N1 では上アーム側に 3 直列の素子 (Dc3 ),下アーム側に単一
の素子 (Dc6 ) を必要とする。したがって,内側の各節点 P1,M,N1 からそれぞれ 4 つ
のクランプダイオードが接続される。
以上の関係を一般化すると,n レベルのダイオードクランプ変換器では内側の n − 2
箇所の節点からそれぞれ n − 1 個のクランプダイオードが必要となる。したがって,1
レグあたり必要なクランプダイオード数は (n − 2) × (n − 1) となり,レベル数の 2 乗に
比例して増加する。
また,4 レベルを超えるダイオードクランプ変換器ではコンデンサ電圧の分圧不均一
2.2 マルチレベル変換器
15
Vdc
S1
S2
0
vO
Vdc
CF
S3
S4
−Vdc
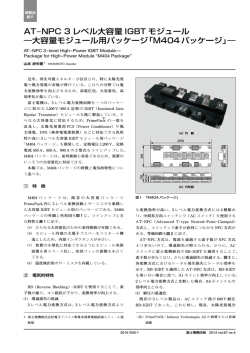
図 2.4: 3 レベルフライングキャパシタ変換器
表 2.1: 3 レベルフライングキャパシタ変換器の出力電圧とスイッチ S1 ∼ S4 の状態
vO
S1
S2
S3
S4
Vdc
ON
ON
OFF
OFF
0
ON
OFF
ON
OFF
OFF
ON
OFF
ON
OFF
OFF
ON
ON
−Vdc
が問題となる [52]。この詳細は第 3 章で述べる。
2.2.2
フライングキャパシタ形
図 2.6 に 3 レベルフライングキャパシタ変換器 (インバータ) の 1 レグの回路構成を示
す [93]。3 レベルダイオードクランプ形と同様に上下アームとも 2 直列の素子で構成さ
れているが,クランプダイオードに代わってコンデンサ (以下,フライングキャパシタと
称す。)CF が接続されている。表 2.1 に出力電圧 vO とスイッチ S1 ∼ S4 の状態を示す。
ここで,vO は直流リンクの中性点 M を基準にし,フライングキャパシタ電圧と 2 台の
直流リンクコンデンサ電圧はすべて Vdc であると仮定している。図 2.5 に示すように,
vO = 0 の場合は 2 つの動作モードが存在する。ここで,出力電流 iO は正 (変換器から流
出している状態) と仮定している。(a)(b) どちらの動作モードも出力電圧 vO は 0 である
第 2 章 高圧電力変換システムの技術動向
16
Vdc
Vdc
0
S1
S1
S2
S2
iO
vO
0
iO
S3
S4
−Vdc
(a) S1 , S3 ターンオン
vO
S3
S4
−Vdc
(b) S2 , S4 ターンオン
図 2.5: vO = 0 の場合の 2 つの動作モード
が,CF に流入する電流は互いに逆方向である。(a) では CF は充電され電圧が上昇する
が,(b) では放電され電圧が低下する。この 2 つの動作モードの期間を調整することで,
CF の電圧を制御できる。また,iO が負の場合は CF の充電・放電の関係が逆となる。
図 2.6 に 4 レベル・5 レベルに拡張したフライングキャパシタ変換器を示す。ここで,
フライングキャパシタはすべて同一の電圧を有するとしている。4 レベルの構成では単
一のフライングキャパシタと 2 直列のフライングキャパシタを必要とする。5 レベルの
構成では単一,2 直列,3 直列のフライングキャパシタを必要とする。ダイオードクラ
ンプ形と異なり,4 レベル以上の構成であってもスイッチングモードの冗長性を用いる
ことで各フライングキャパシタの電圧を制御できる。ただし,レベル数の増加にともな
いキャパシタ数も増加し,ダイオードクランプ形と同様に実装が困難になる。フライン
グキャパシタ数は,3 レベルでは 1,4 レベルでは 1 + 2 = 3,5 レベルでは 1 + 2 + 3 = 6
必要である。この関係を一般化すると,n レベルでは 1 + 2 + · · · n − 2 = 21 (n − 1)(n − 2)
となり,レベル数の 2 乗に比例してフライングキャパシタの必要数は増加する。
2.2.3
モジュラー・マルチレベル・カスケード変換器 (MMCC)
モジュラー・マルチレベル・カスケード変換器 (MMCC: Modular Multilevel Cascade
Converter) は,それまでに使用されていたカスケード変換器 [27,55,57,107,109] とモジュ
2.2 マルチレベル変換器
17
S1
S2
S1
S3
S2
S4
vO
S3
S5
vO
(a) 4 レベル
S4
S6
S5
S7
S6
S8
(b) 5 レベル
図 2.6: 4 レベル・5 レベルフライングキャパシタ形変換器
Modular Multilevel Cascade Converter (MMCC) Family
Single-Star Bridge-Cells (SSBC) (図 2.8)
Single-Delta Bridge-Cells (SDBC) (図 2.9)
Double-Star Chopper-Cells (DSCC) (図 2.10(a))
Double-Star Bridge-Cells (DSBC) (図 2.10(b))
図 2.7: MMCC の用語と分類 [94]
ラー・マルチレベル変換器 [98–101, 103] という用語を統合・整理した名称である [94]。
カスケード変換器は単相フルブリッジ変換器の交流側をカスケード接続した構成として
知られている。一方,モジュラー・マルチレベル変換器は三相インバータの各アームを
単相フルブリッジ変換器または双方向チョッパ回路のカスケード接続で置き換えた回路
構成と見なせる。しかし,どちらの回路構成も「カスケード接続」でありかつ「モジュー
第 2 章 高圧電力変換システムの技術動向
18
図 2.8:
モ ジ ュ ラ ー・マ ル
図 2.9:
モ ジ ュ ラ ー・マ ル
チ レ ベ ル・カ ス ケ ー ド 変 換
チ レ ベ ル・カ ス ケ ー ド 変 換
器
器 (MMCC)
(MMCC)
Single-Star
Bridge-Cells (SSBC)
Single-Delta
Bridge-Cells (SDBC)
ル構成」のマルチレベル変換器である。したがって,
「カスケード変換器」あるいは「モ
ジュラー・マルチレベル変換器」という用語では主回路構成を特定できない。
図 2.7 に 4 種類のモジュラー・マルチレベル・カスケード変換器の用語と分類を示す。
また,図 2.8–2.10(b) にそれぞれの回路構成を示す。モジュラー・マルチレベル・カス
ケード変換器 (MMCC) という用語は 4 種類の回路構成に共通する概念・特長である。こ
れは苗字 (family name) のようなものであり,これだけでは回路構成を特定できないた
め個々の回路に名前 (given name) を導入している。
図 2.8 に示す MMCC-SSBC (Single-Star Bridge-Cells) は,単相フルブリッジ変換
器 (Bridge-Cells) のカスケード接続を単一のスター結線 (Single-Star) で構成した回路
方式である。図 2.9 に示す MMCC-SDBC は Bridge-Cells をデルタ結線 (Single-Delta)
で構成した回路構成である。図 2.10 に示す回路構成は,(a)(b) どちらも 2 重スター
結線 (Double-Star) の MMCC である。(a) は双方向チョッパセル (Chopper-Cells) を用
いているため MMCC-DSCC (Double-Star Chopper-Cells) と命名されている。(b) は
Bridge-Cells を採用しているため MMCC-DSBC (Double-Star Bridge-Cells) と命名され
ている。
SSBC と SDBC は 3 端子回路であるため,そのままでは交流/直流変換に応用できない
が,DSCC・DSBC に比べセル数を低減できる特長がある。そのため,STATCOM [95]
や電池電力貯蔵装置 [96] などへの応用が期待できる。また,SDBC は回路内に循環電流
2.2 マルチレベル変換器
19
DC or
1ϕ AC
DC
3ϕ
AC
3ϕ
AC
(a)
Double-Star
Cells (DSCC)
Chopper-
(b) Double-Star Bridge-Cells (DSBC)
図 2.10: 二重スター結線のモジュラー・マルチレベル・カスケード変換器 (MMCC)
を有するため逆相無効電力補償にも応用できる [97]。一方で,DSCC は交流/直流変換
が可能であるため,モータドライブや BTB システムへの応用が可能である [100–104]。
DSBC は DSCC と同様に交流/直流変換ができるが,直流側の電圧が変動しても交流側
の電圧を一定に維持できる特長を持つ。それゆえ,DSBC は風力・太陽光などの再生可
能エネルギー用パワーコンディショナへの応用が考えられる [105]。また,直流ではな
く単相交流を出力・入力することも可能である。文献 [106] では欧州の一部地域の電気
鉄道向けに,三相 50 Hz から単相 16 2/3 Hz の変換に DSBC の適用を検討している注 2 。
2.2.4
その他のマルチレベル変換器
マルチレベル変換器はダイオードクランプ形,フライングキャパシタ形,モジュラー・
マルチレベル・カスケード変換器に大きく分類できるが,これら 3 つの分類から派生し
た,あるいは組み合わせた回路構成も検討されている。
図 2.11 に T-type 中性点クランプ (NPC) 変換器 (インバータ) を示す [36]。これは,2
レベル変換器に中性点 (節点 M) の電圧を直接出力する双方向スイッチを付加した回路構
注2
ドイツ・スイス・オーストリアの電気鉄道は単相 15 kV,16 2/3 Hz で饋電されている。
第 2 章 高圧電力変換システムの技術動向
20
Vdc P
S1
0
M
vO
S2
−Vdc N
図 2.11: T-type NPC インバータ [36]
成である。S1 と S2 の印加電圧はコンデンサ電圧 2 台分 (2Vdc ) であり,双方向スイッチ
の印加電圧はコンデンサ 1 台分 (Vdc ) である。T-type NPC インバータは 3 レベルの出力
電圧波形を実現するが,高耐圧化には適していない。しかし,図 2.2 に示すダイオード
クランプ形の NPC 変換器に比べ出力電流の通過素子数が少ないだけでなく,S1 と S2 の
還流ダイオード (FWD) の逆電圧がコンデンサ電圧 1 台分でありリカバリ損失を低減で
きる特長を有する。したがって,低圧の用途においては低損失化が期待できる。図 2.11
では双方向スイッチに IGBT とダイオードの直列接続した組みを逆並列としているが,
逆耐圧性能を有する RB-IGBT (Reverse-Blocking IGBT) を用いることで直列接続する
ダイオードを省略可能であり導通損失の低減に寄与する。また,RB-IGBT を双方向ス
イッチに用いた T-type NPC インバータ用 IGBT モジュールが実用化されている [73]。
文献 [74] では,T-type NPC インバータを低圧モータドライブに応用した場合,2 レベ
ルインバータの使用に比べインバータ損失 (パワーデバイス損失) だけでなく,モータ損
失も低減できることが実証されている。モータ損失も低減される理由は,出力電圧の 3
レベル化によってモータ電流の高調波成分が減少するためである。
図 2.12 に 3 レベルアクティブ NPC (ANPC) 変換器 (インバータ) を示す [75]。これ
は,3 レベルダイオードクランプ変換器のクランプダイオードをスイッチ Sc1 , Sc2 で置
き換えた回路構成である。これは,3 レベルダイオードクランプ変換器で問題となるパ
ワーデバイスの損失不均一を低減する特長がある。
図 2.13 に 5 レベル ANPC 変換器 (インバータ) 示す。これは,Sa1 ∼ Sa4 で構成される
3 レベル ANPC 変換器に,Sb1 ∼ Sb4 で構成される 3 レベルフライングキャパシタ変換
器を組み合わせた回路構成である。フライングキャパシタの電圧を Vdc /2 に制御するこ
2.2 マルチレベル変換器
21
Vdc P
Sa1
Vdc P
S1
Sb1
Sa2
Sc1
0
vO
M
Sc2
−Vdc N
S2
Sb2
0
M
Vdc
2
S3
Sb3
Sa3
S4
図 2.12: 3 レ ベ ル ア ク テ ィ ブ
vO
Sb4
−Vdc N
Sa4
NPC (ANPC) インバータ [75]
図 2.13: 5 レ ベ ル ア ク テ ィ ブ
NPC (ANPC) インバータ [76]
とで 5 レベルの電圧を出力する。これは,階調形の変換器と見なせる。Sa1 ∼ Sa4 の印加
電圧は Vdc である一方で,Sb1 ∼ Sb4 の印加電圧は Vdc /2 である。そのため,Sa1 ∼ Sa4 の
スイッチング周波数を低く設計し,Sb1 ∼ Sb4 のスイッチング周波数を高く設計するこ
とで,低歪みの出力電流が得られるだけでなく高効率化が実現できる [77–79]。文献 [78]
では 5 レベル ANPC 変換器を構成する一部の IGBT をダイオードに置き換え,整流器
に特化させた回路構成が提案されている。また,フライングキャパシタ変換器側のレベ
ル数を増加させた回路構成も検討されている [80]。
図 2.14 に 3 レベルダイオードクランプ変換器 (インバータ) に単相フルブリッジ変換
器を接続した回路構成を示す [81]。これは,フルブリッジ変換器のコンデンサ電圧を 3
レベル変換器のコンデンサ電圧よりも低くすることで,階調形の出力電圧波形を実現す
る。5 レベル ANPC 変換器と同様に,3 レベル変換器のパワーデバイスのスイッチング
周波数を低く,フルブリッジ変換器のスイッチング周波数を高く設計できる。文献 [81]
では 3 レベル変換器に 6 kV GCT を,フルブリッジ変換器に 1.7 kV IGBT を使用した
4.16 kV 系統連系変換器を検討している。また,出力レベル数の増加のため,フルブリッ
ジを複数台直列接続した回路構成も検討されている [82]。つまり,図 2.14 の回路構成は
第 2 章 高圧電力変換システムの技術動向
22
Three-level converter
Vdc P
Full-bridge converter
0
M
vO
−Vdc N
図 2.14: 3 レベルダイオードクランプ変換器にフルブリッジ変換器を接続し
た回路構成 [81]
ダイオードクランプ形にモジュラー・マルチレベル・カスケード変換器を組み合わせた
回路構成と見なせる。
2.3
高圧モータドライブ基本的な構成と用途
電圧形インバータを用いた高圧モータドライブシステムの基本的な回路構成は,回生
の有無によって 2 つに分けられる。回生を必要とする負荷の場合,電源側からモータだ
けでなく,モータから電源への,双方向のパワーフローに対応する必要がある。一方で,
回生の必要ない場合は電源からモータへの一方向のパワーフローに対応すればよい。図
2.15 に示すように電圧形変換器を用いたモータドライブシステムは交流/直流変換 (整流
器) と直流/交流変換 (インバータ) から構成される。回生の必要な場合,整流器・イン
バータともに双方向のパワーフローに対応する必要がある。したがって,整流器にはイ
ンバータと同一の回路構成である PWM 整流器注 3 が用いられる。一方で,回生の必要な
い場合は,PWM 整流器よりも安価・高効率かつ信頼性の高いダイオード整流器が一般
的に用いられる。
表 2.2 に回生の有無と負荷のトルク特性に着目した高圧モータドライブの用途を示
す [23]。ここで,定トルク負荷はモータの基底周波数まで定トルクを要求する負荷を意
注3
回生動作に対応できる整流器を英語では “active rectifier” と称すことが一般的である。
2.3 高圧モータドライブ基本的な構成と用途
AC
23
DC
AC
M
PWM inverter
PWM rectifier
(a) 回生の必要な場合
AC
DC
AC
M
Diode rectifier
PWM inverter
(b) 回生の必要ない場合
図 2.15: モータドライブの基本構成
味し,基底周波数を超える高速域では定出力運転となる場合も含む。鉄鋼圧延主機や抄
紙機などの製造ライン用モータドライブでは高い応答・制御性を必要とするため,回生
動作を必要とする。鉄道車両駆動もブレーキ時に架線へ回生を行う。回生を必要とする
用途はそのすべてが定トルク負荷に分類できる。一方,回生の必要ない用途の代表例と
してファン・ブロワ・ポンプ等の風量・水量制御が良く知られている。これらはトルク
が回転数の 2 乗に比例し,駆動電力は回転数の 3 乗に比例する。以下ではこのような負
荷を「2 乗低減トルク負荷」と称す。一方で,押出機やゴムミキサなどの定トルク負荷
も回生を必要としないため,ファン・ブロワ等の 2 乗低減トルク負荷と同様にダイオー
ド整流器を電源側に使用したシステムが採用できる [126–129]。ただし,定トルク負荷
は低速域で定格トルクを必要とする点が 2 乗低減トルク負荷とは大きく異なる。
第 2 章 高圧電力変換システムの技術動向
24
表 2.2: 高圧モータドライブの用途
定トルク負荷
回生あり
回生なし
鉄鋼圧延,抄紙機
ゴムミキサ,キルン,
鉄道車両駆動
押出機,攪拌機
2 乗低減トルク負荷
ファン,ブロワ,
コンプレッサ,ポンプ
電源高調波電流の抑制
2.4
高圧モータドライブシステムの設置にあたっては,電源電流の高調波ガイドライン遵
守が課題となる [66]。PWM 整流器は電源電流を正弦波に制御できるが,ダイオード整
流器は電源高調波電流を発生する。この電源高調波電流の抑制法は,ダイオード整流器
の多パルス化とフィルタとの併用の 2 つに分けられる。本節では多パルスダイオード整
流器の基本的な構成と,電源高調波電流抑制用フィルタの技術動向としてハイブリッド
フィルタについて説明する。
2.4.1
三相多パルスダイオード整流器
図 2.16 に三相多パルスダイオード整流器の回路構成を示す [5, 83–85]。多パルス整流
器は多巻線・多相変圧器と複数台の三相 6 パルスダイオード整流器から構成される。こ
こで,変圧器の一次巻線は Y 結線で示しているが,∆ 結線も可能である。各 6 パルスダ
イオード整流器は 6n ± 1 次 (n = 1, 2, 3 · · · ) の高調波電流を流出するが,移相された変
圧器の巻線によって一次巻線から電源側に流出する低次の高調波電流を相殺できる注 4 。
図 2.16(a) に示す 12 パルスの構成では Y-Y-∆ 変圧器を使用しており,∆ と Y の二次巻
線は 30◦ の位相差を持っている。この位相差によって,12n ± 1 次の高調波成分のみが
電源側に流出し,各 6 パルスダイオード整流器が流出する 5 次,7 次の高調波電流を抑
制できる。(b) の 18 パルスの構成では,3 つの二次巻線は 20◦ 毎に移相させる必要があ
る。しかし,単純な ∆ または Y 結線では 30◦ またはその整数倍の位相差しか実現でき
注4
正確にはダイオード整流器は電源側から高調波電流を「引き込む」ものであるが,高調波電流のみ
に着目した場合ダイオード整流器が高調波電源と見なせるため「流出する」と表現している。
2.4 電源高調波電流の抑制
25
+
−15◦
+
−20◦
0◦
0◦
15◦
+
0◦
30◦
−
20◦
−
(b) 18 パルス
(a) 12 パルス
30◦
−
(c) 24 パルス
図 2.16: 三相多パルスダイオード整流器
ない。それゆえ,二次巻線のうち 2 つを千鳥結線として,20◦ および −20◦ に移相してい
る。また,電源側には 18n ± 1 次の高調波成分のみが流出する。(c) に示す 24 パルスの
構成も同様に,∆ 結線と Y 結線に加え 2 つの千鳥結線を用いることで 15◦ 毎に移相して
いる。電源側には 24n ± 1 次の高調波成分のみが流出する。図には示していないが,24
を超えるパルス数も 2 次巻線の位相を調整することで構成可能である。実用例として,
アルミニウム電解炉用整流設備に 60 パルスダイオード整流器が利用されている [86]。
2.4.2
ハイブリッドフィルタ
18 パルス以上のダイオード整流器は高調波ガイドラインを遵守できることが報告され
ている [83–86],しかし,二次巻線数の増加だけでなく千鳥結線が必要であるため変圧
器の構造が複雑化する。これは,コストの増加と信頼性の低下を招く。さらに,二次巻
線と各 6 パルスダイオード整流器を接続するケーブル数も増加するため,ケーブルの重
量が問題となる。したがって,6 パルスまたは 12 パルスのダイオード整流器が望ましい
が,電源高調波電流の抑制が課題となる。
第 2 章 高圧電力変換システムの技術動向
26
Six-pulse
diode recitifier
Passive filter
250 kVA (25%)
Inverter
6.6 kV
6.6 kV
1 MW
M
Active filter 60 kVA (6%)
1.3 kV
(20%)
図 2.17: 6 パルスダイオード整流器用ハイブリッドフィルタ [69, 70]
高圧用 6 パルスおよび 12 パルスダイオード整流器に適したハイブリッドフィルタが
提案されている [67–70]。ハイブリッドフィルタはパッシブフィルタ (LC フィルタ) とア
クティブフィルタ (PWM 変換器) の直列接続により構成され,以下の特長を有する。
• アクティブフィルタには電源電圧が印加されないため,3.3 kV/6.6 kV 配電系統
に直結可能であり,かつアクティブフィルタの所要容量を大幅低減できる。
• パッシブフィルタは単一の LC フィルタのみであり,一般的なパッシブフィルタ
と比較して重量・体積を低減可能。
• パッシブフィルタの併用によって,アクティブフィルタが発生するスイッチング
リプルを低減可能。
図 2.17 に 6 パルスダイオード整流器用ハイブリッドフィルタの回路構成を示す [69,70]。
ここでは 6.6 kV 1 MW トランスレス・モータドライブシステムへの応用を想定してい
る。パッシブフィルタ 7 次に同調しており,その容量は 250 kVA (25%) である。アク
ティブフィルタの変換器容量は 60 kVA (6%),直流リンク電圧は 1.3 kV (20%) である。
2.4 電源高調波電流の抑制
27
12-pulse
diode recitifier
Inverter
22 kV
6.6 kV
10 MW
M
6.6 kV
Passive filter
800 kVA (8%)
Active filter 80 kVA (0.8%)
0.46 kV
(7%)
図 2.18: 12 パルスダイオード整流器用ハイブリッドフィルタ [71]
アクティブフィルタに 3 レベル変換器を使用した場合,パワーデバイスには流通量の多
い 1.2 kV IGBT が採用できる [69, 70]。
図 2.18 に 12 パルスダイオード整流器用ハイブリッドフィルタの回路構成を示す [71]。
ここで,22 kV 受電の 6.6 kV 10 MW モータドライブシステムを想定している。受電電圧
が 22 kV 以上の場合は電圧整合と保護の観点からハイブリッドフィルタにも降圧変圧器
が必要である。図ではハイブリッドフィルタ用に別の変圧器を導入しているが,Y-Y-∆
変圧器に第 4 巻線を追加することも可能である。パッシブフィルタは 11 次に同調してお
り,容量は 800 kVA (8%) である。アクティブフィルタの変換器容量は 80 kVA (0.8%)
である。パッシブフィルタ・アクティブフィルタとも 6 パルスダイオード整流器を用い
る場合に比べ所要容量が小さい。ハイブリッドフィルタ用の降圧変圧器の二次側電圧を
6.6 kV とした場合,アクティブフィルタの直流リンク電圧は 460 V (7%) である。3 レ
ベル変換器を用いてアクティブフィルタを構成した場合,パワーデバイスには流通量の
多い 600 V IGBT が採用できる。
第 2 章 高圧電力変換システムの技術動向
28
PWM rectifier
PWM inverter
M
3.3 kV
図 2.19: 3 レベル PWM 整流器・インバータを用いたモータドライブシステム
2.5
2.5.1
現行の高圧モータドライブ
3 レベル PWM 整流器・インバータを用いたモータドライブ
鉄鋼圧延主機や抄紙機などは高い応答が要求される反面,定格電圧と電力は比較的小
さい。低圧・数 kW 程度から,3.3 kV 10 MW 超のモータドライブが広く用いられてい
る [23]。図 2.19 に 3 レベル PWM 整流器・インバータを用いた 3.3 kV モータドライブシ
ステムを示す。パワーデバイスには 4.5 kV 級の IGBT・IEGT (Injection Enhanced Gate
Transistor) [87],あるいは GCT が採用されている [39]。PWM 整流器の採用によって,
ダイオード整流器とは異なり電源高調波電流の対策が不要である。また,2 直列の 3.3
kV IGBT を用いて 3 レベル PWM 変換器・インバータを用いたモータドライブシステ
ムも実用化されている [38]。これは,5 レベルインバータと同様に 1 レグあたり 8 つの
IGBT で構成されている。
一方で,3.3 kV 以下の電圧定格のモータドライブでは 2 レベル PWM 整流器・イン
バータを用いたシステムも利用されている [37, 39]。
2.5.2
多巻線・多相変圧器を用いたモータドライブ
1990 年代中盤,米国 Robicon 社は多巻線・多相変圧器と複数のパワーセルを用いた高
圧モータドライブシステムを開発・実用化した [27]。図 2.20 に Robicon 社が開発・実用
化した高圧モータドライブシステムを示す。各パワーセルは 6 パルスダイオード整流器
とフルブリッジインバータから構成されている。したがって,回生の必要ない負荷を対
2.5 現行の高圧モータドライブ
power
cell
power
cell
power
cell
29
power
cell
power
cell
power
cell
power
cell
power
cell
power
cell
M
(a) 主回路構成
(b) パワーセル (power cell)
図 2.20: 多巻線変圧器を用いた高圧モータドライブ [27]
象としている。6 パルスダイオード整流器が接続されている変圧器の各巻線は互いに移
相されているため,多相整流器として動作する [83]。それゆえ各 6 パルスダイオード整
流器が発生する電源高調波電流を抑制可能である。フルブリッジインバータの出力端は
カスケード接続 (Y 結線) され,各フルブリッジコンバータの和の電圧をモータに供給し
ている。これは,MMCC-SSBC の各セルのコンデンサが 6 パルスダイオード整流器に接
続された回路構成である。国内の電機各社もこの回路方式を用いた 6.6 kV/3.3 kV モー
タドライブシステムを製品化している [28–35]。
図 2.21 に東芝三菱電機産業システム株式会社が開発・実用化している単相 3 レベルイ
ンバータを Y 接続した高圧モータドライブを示す [88–90]。この回路は変圧器の各巻線
に単相 3 レベルインバータ (NPC インバータ) を接続した構成である。単相 3 レベルイ
ンバータの Y 結線により相電圧で 5 レベルの電圧波形が得られる。パワーデバイスは
4.5 kV 耐圧の IGBT,IEGT,または GCT を採用している。各単相 3 レベルインバー
30
第 2 章 高圧電力変換システムの技術動向
M
図 2.21: 3 レベルインバータを Y 接続した高圧モータドライブ [88–90]
タには 12 パルス整流器が接続され,システム全体では 36 パルス整流器として動作して
いる。
2.5.3
マトリクスコンバータを用いた高圧モータドライブ
図 2.22 に安川電機株式会社が開発・実用化したマトリクスコンバータを用いた高圧
モータドライブを示す [91, 92]。この回路は変圧器の各巻線に三相–単相マトリクスコン
バータセル (MxC) を接続し,セルの各単相出力をカスケード接続 (Y 結線) した構成で
ある。これは,Robicon 社が開発したモータドライブシステム [27] のパワーセルを三相
2.5 現行の高圧モータドライブ
31
MxC
MxC
MxC
MxC
MxC
MxC
MxC
MxC
MxC
M
(a) 主回路構成
(b) 三相–単相マトリックコンバー
タセル (MxC)
図 2.22: マトリクスコンバータを多重接続した高圧モータドライブ [91, 92]
ダイオード整流器・フルブリッジコンバータからマトリクスコンバータに置き換えた回
路構成と見なせる。図 2.22(b) に三相–単相マトリクスコンバータセル (MxC) の回路構
成を示す。これは,6 つの双方向スイッチからなり,変圧器の漏れインダクタンスを利
用することで入力インダクタを不要としている。
カスケード接続したセルは,3.3 kV システムの場合で 1 相あたり 3 段,6.6 kV システ
ムでは同 6 段としている。また,マトリクスコンバータを使用したことで回生動作も可
能である。
第 2 章 高圧電力変換システムの技術動向
32
Converter Cell No. A-1
10 ∼ 20
kHz
M
Converter Cell No. A-2
Converter Cell No. A-N
図 2.23: MMCC-SSBC と双方向絶縁型 DC/DC コンバータを用いた高圧
モータドライブ [107]
2.6
2.6.1
次世代高圧モータドライブの研究動向
MMCC-SSBC と双方向絶縁型 DC/DC コンバータを用いた
モータドライブ
図 2.23 に MMCC-SSBC と双方向絶縁型 DC/DC コンバータを用いた高圧モータド
ライブを示す [107]。これは,2 台の MMCC-SSBC 間の各ブリッジセルを双方向絶縁
型 DC/DC コンバータ [108] で接続した回路構成である。一方の MMCC-SSBC は電源
(3.3 kV/6.6 kV) に接続され,もう一方の MMCC-SSBC はモータに接続されている。双
方向絶縁型 DC/DC コンバータの採用により電源・モータ間の絶縁が確保できるだけで
なく,回生動作にも対応可能である。また,この回路構成は 6.6 kV 配電系統用 BTB シ
ステムにも応用できる [109]。双方向絶縁型 DC/DC コンバータに用いる変圧器は高周
波 (10∼20 kHz) で駆動できるため,従来の商用周波数 (50 Hz/60 Hz) 変圧器を用いた高
圧モータドライブ [27, 88–90, 92] と比較してシステム全体の大幅な小型化・軽量化が期
待できる。
設計例として 3.3 kV モータドライブを対象とし 1 相あたりの段数 N = 9 とすると,各コ
ンバータセルの直流電圧は 340 V となり 600 V 耐圧の IGBT または SiC-JFET/MOSFET
を採用できる [107]。
2.6 次世代高圧モータドライブの研究動向
cell u, 1
cell u, n2
33
cell v, 1
cell v, n2
cell w, 1
cell w, n2
M
cell u, n2 +1
cell v, n2 +1
cell w, n2 +1
cell u, n
cell v, n
cell w, n
図 2.24: MMCC-DSCC を用いた高圧モータドライブ
2.6.2
MMCC-DSCC を用いた高圧モータドライブ
図 2.24 に MMCC-DSCC を用いた高圧モータドライブの回路構成を示す [99–101]。電
源側はダイオード整流器を想定している。この回路は同一構造の双方向チョッパセルの
カスケード接続から構成されている [98]。それゆえ,セル数 n(双方向チョッパセルの段
数) を増やすことで高耐圧化が実現できる。また,各双方向チョッパセルがコンデンサ
を有し正準セルを構成しているため,ダイオード整流器の出力 (直流リンク) にコンデン
サを必要としない [102]。表 2.3 に 6.6 kV モータドライブの設計例を示す [100]。直流リ
ンク電圧はダイオード整流器を想定し 9 kV としている。IGBT の耐圧は双方向チョッ
パセルのコンデンサ電圧の 2 倍程度としている。1 レグあたりのセル数 n = 8 とした場
合,双方向チョッパ回路のコンデンサ電圧は 2.25 kV 程度となり 4.5 kV IGBT が利用で
きる。同様に n = 10 の場合は 3.3 kV IGBT を,n = 20 の場合は 1.7 kV IGBT を採用
できる。
MMCC-DSCC を用いた高圧モータドライブは多段化が容易である特長の一方で,
モータ低速運転時に双方向チョッパセルのコンデンサ電圧脈動が拡大する問題があ
第 2 章 高圧電力変換システムの技術動向
34
表 2.3: MMCC-DSCC を用いた 6.6 kV 高圧モータドライブ構成例
n
IGBT
line-to-neutral line-to-line voltage step
8
4.5 kV
9 levels
17 levels
1.12 kV
10 3.3 kV
11 levels
21 levels
0.90 kV
20 1.7 kV
21 levels
41 levels
0.45 kV
n: the number of cells per leg
る [101, 103, 104]。この解決のため,モータ駆動周波数を限定して運転する手法や [101],
コンデンサ電圧脈動幅を低減する制御法の検討などが行われている [103,104]。文献 [104]
では零相電圧と MMCC-DSCC 内を流れる循環電流を利用して,低速域だけでなく零速
においてもコンデンサ電圧脈動を一定値以内に抑制している。しかし,この手法は双方
向チョッパセルの電流定格の増大を招くため,低速域における出力電流の小さい 2 乗低
減トルク負荷への応用に限定している。
2.7
高圧電力変換システムの技術動向と本論文の位置付け
本章では,高圧電力変換システムの技術動向について概説し,特にマルチレベル変換器
が次世代の高圧モータドライブシステムに適することを示している。5 レベルダイオー
ドクランプ PWM インバータは,現行の 4.5 kV IGBT を用いて 6.6 kV 直接受電を実現
できる。また,単相のブリッジセルまたは双方向チョッパセルをベースとした MMCC
に比べコンデンサ容量を小さく設計できる。特に,MMCC-DSCC では実現困難な定ト
ルク負荷の駆動も可能である。
一方で,2 直列 IGBT を用いた 3 レベルインバータが実用化している [38]。これは,1
レグあたり 8 つの IGBT で構成されており,5 レベルインバータと同一の素子数である。
それゆえ,クランプダイオードの必要数を除けば,3 レベルインバータと同様の実装技
術で 5 レベルインバータを実用化可能であると考えられる。
以上から,5 レベルダイオードクランプ PWM インバータの採用は,次世代の高圧モー
タドライブシステムにおける有力な候補であると考えられる。
35
第3章
5 レベルダイオードクランプインバータの
動作原理と技術動向
本章では,5 レベルダイオードクランプ PWM インバータの動作原理と,直流リンク
電圧の分圧不均一について述べる。分圧不均一の抑制法について調査を行い,ダイオー
ド整流器を使用する場合に出力電圧の制約なく不均一を抑制するためには,直流電圧均
一回路が必要不可欠であることを示す。また,5 レベルインバータを 6.6 kV 高圧モータ
ドライブに応用した場合の構成例について紹介する。
3.1
3.1.1
基本原理
回路構成とスイッチングモード
図 3.1(a) に 5 レベルインバータの 1 相分の回路構成を示す。上下アームにそれぞれ
4 つのスイッチとクランプダイオードから構成されている。本論文では,5 レベルイン
バータの直流リンクの任意の 2 節点 X–Y 間 (X,Y はそれぞれ P2,P1,M,N1,また
は N2 のいずれかを示す。) の電圧を vX−Y と定義する。例えば,節点 P2–M 間の電圧は
vP2−M である。また,1 台の分圧コンデンサ電圧の直流平均値を Vdc とする。
5 レベルインバータは各節点のいずれかにクランプするスイッチとして動作するため,
図 3.1(b) に示すように 5 極スイッチと見なせる。表 3.1 に 5 レベルインバータの中性点
(節点 M) を基準にした出力電圧 vOM とスイッチ S1 ∼ S8 の状態の関係を示す。これは,
各節点 (node) の電圧を出力するときにオンするスイッチを示している。いずれの出力電
圧においても連続する 4 つのスイッチがオンする。
図 3.2 および 3.3 に各出力電圧における 5 レベルインバータのスイッチングモードを示
第3章
36
5 レベルダイオードクランプインバータの動作原理と技術動向
P2
P2
S1
S2
P1
P1
S3
S4
vOM
M
vOM
M
S5
S6
N1
N1
S7
S8
N2
N2
(a) 1 相分回路構成
(b) 5 極スイッチと見な
した等価回路
図 3.1: 5 レベルダイオードクランプインバータの 1 相分の構成
表 3.1: 出力電圧とスイッチ S1 ∼ S8 の状態
vOM
node
S1
S2
S3
S4
vP2−M (= 2Vdc )
P2
ON
ON
ON
ON
vP1−M (= Vdc )
P1
OFF
ON
ON
0
M
OFF
OFF
vN1−M (= −Vdc )
N1
OFF
vN2−M (= −2Vdc )
N2
OFF
S5
S6
S7
S8
OFF OFF
OFF
OFF
ON
ON
OFF
OFF
OFF
ON
ON
ON
ON
OFF
OFF
OFF
OFF
ON
ON
ON
ON
OFF
OFF
OFF
OFF
ON
ON
ON
ON
す。出力電流 iO の極性によって導通する素子は異なるため,iO > 0 の場合を図 3.2 に,
iO < 0 の場合を図 3.3 にそれぞれ示している。ここで,オン状態の素子を黒色で,オフ
状態の素子を灰色で示している。また,S1 ∼ S8 においてオン信号は与えられているが
電流が通過しない素子をイタリック体で示している。図 3.2(a) では S1 ∼ S4 に出力電流
3.1 基本原理
37
P2
P2
Dc1
D1
S1
D2
S2
D3
S3
D4
D5
S4
vOM
M
iO
S5
D6
S6
P1
Dc2
Dc4
M
Dc3
Dc5
N1
Dc1
D1
S1
D2
S2
P1
N2
D7
S7
D8
S8
Dc2
Dc4
D3
S3
D4
D5
S4
vOM
M
iO
S5
D6
S6
Dc3
Dc5
Dc6
N2
Dc2
Dc4
Dc1
D2
S2
D3
S3
D4
D5
S4
vOM
iO
S5
D6
S6
D7
S7
D8
S8
Dc3
Dc5
D7
S7
D8
S8
Dc6
N2
(b)
P2
S1
N1
(a) vOM = 2Vdc
D1
S1
D2
S2
(c)
P2
Dc1
D1
S1
D2
S2
D3
S3
D4
D5
S4
vOM
iO
S5
D6
S6
D7
S7
D8
S8
P1
P1
Dc2
M
Dc1
D1
P1
N1
Dc6
P2
Dc4
D3
S3
D4
D5
S4
vOM
M
iO
S5
D6
S6
D7
S7
D8
S8
Dc3
Dc5
N1
Dc6
N2
(d)
Dc2
N1
Dc4
Dc3
Dc5
Dc6
N2
(e)
図 3.2: iO > 0 の場合動作モード
iO が通過し,節点 P2 の電圧を出力する。(b) ではクランプダイオード Dc1 と S2 ∼ S4 を
経由して節点 P1 の電圧が出力される。ここで S5 にもオン信号が与えられるが,電流は
流れない。(c) では Dc2 と S3 , S4 を経由して節点 M の電圧が出力される。S5 と S6 にも
オン信号は与えられるが,電流は流れない。(d) では Dc3 と S4 を経由して節点 N1 の電
第3章
38
5 レベルダイオードクランプインバータの動作原理と技術動向
P2
P2
Dc1
D1
S1
D2
S2
D3
S3
D4
D5
S4
vOM
M
iO
S5
D6
S6
P1
Dc2
Dc4
M
Dc3
Dc5
N1
Dc1
D1
S1
D2
S2
P1
N2
D7
S7
D8
S8
Dc1
Dc2
Dc4
D3
S3
D4
D5
S4
vOM
M
iO
S5
D6
S6
Dc3
Dc5
N2
(a)
Dc2
Dc4
D1
S1
D2
S2
S2
D3
S3
D4
D5
S4
vOM
iO
S5
Dc5
D6
S6
D7
S7
D8
S8
Dc6
D7
S7
N2
D8
S8
(c)
P2
Dc1
D1
S1
D2
S2
D3
S3
D4
D5
S4
vOM
iO
S5
D6
S6
D7
S7
D8
S8
P1
P1
Dc2
M
D2
Dc3
(b)
Dc1
S1
N1
Dc6
P2
D1
P1
N1
Dc6
P2
Dc4
D3
S3
D4
D5
S4
vOM
M
iO
S5
D6
S6
D7
S7
D8
S8
Dc3
Dc5
N1
Dc6
N2
(d)
Dc2
N1
Dc4
Dc3
Dc5
Dc6
N2
(e)
図 3.3: iO < 0 の場合動作モード
圧が出力される。S5 ∼ S7 にはオン信号が与えられるが電流は流れない。(e) ではスイッ
チ S5 ∼ S8 にそれぞれ逆並列されている帰還ダイオード D5 ∼ D8 を経由して節点 N2 の
電圧が出力される。
図 3.3(a) では帰還ダイオード D1 ∼ D4 を iO が通過して節点 P2 の電圧が出力される。
3.1 基本原理
39
S1 ∼ S4 はオン信号が与えられているが電流は流れない。(b) では S5 と Dc4 を介して節
点 P1 の電圧が出力される。S2 ∼ S4 はオン信号が与えられているが電流は流れない。(c)
では S5 ,S6 と Dc5 を経由して節点 M の電圧が出力される。S3 と S4 はオン信号が与え
られているが電流は通過しない。(d) では S5 ∼ S7 と Dc6 を通って節点 N1 の電圧が出力
される。S4 はオン信号が与えられているが電流は流れない。(e) では S5 ∼ S8 がオン状
態となり節点 N2 の電圧が出力される。
3.1.2
スイッチング損失とリカバリ損失
表 3.2 と 3.3 にそれぞれ iO > 0 および iO < 0 の場合の,転流時にスイッチング・リカ
バリ損失が発生する素子を示す。P2 → P1 は出力電流 iO が節点 P2 から P1 へ転流を,
P2 ← P1 は P1 から P2 への転流を示し,ほかも同様に矢印の前後が転流する前後の節点
を表している。還流ダイオードについては D1 と D8 のみリカバリ損失が生じ,D2 ∼ D7
ではリカバリ損失が発生しない。iO > 0 において,還流ダイオード D5 ∼ D8 がターンオ
フするのは N2 から N1 への転流時であるが,S5 ∼ S7 にオン信号が与えられているため
D5 ∼ D7 には逆電圧が印加されず,D8 のみリカバリ損失が発生する。iO < 0 において
も同様に,D1 ∼ D4 がターンオフする P2 から P1 への転流時に S2 ∼ S4 にオン信号が与
えられているため,D1 のみリカバリ損失が発生する。これは,3 レベルインバータにお
いても同様である [49, 75]。また,Dc2 ∼ Dc5 は 2 直列または 3 直列になっているが,ク
ランプダイオードのターンオフ時の逆電圧は直列数に関わらず Vdc である。そのため,
Dc2 ∼ Dc5 の 1 つの素子あたりの逆電圧は Vdc /2 または Vdc /3 であり,Dc1 と Dc6 に比べ
1 素子あたりのリカバリ損失は小さい。
3.1.3
PWM 制御法
5 レベルインバータの PWM 制御法は,空間ベクトルを用いる手法と,キャリア波ベー
スの手法に分類できる。5 レベルインバータを含めマルチレベル変換器に空間ベクトル
を適用するとスイッチングパターンが複雑化する。また,キャリア周波数が十分高い場
合,空間ベクトルを用いる手法はキュリア波ベースの手法と比べ性能差が小さい。本論
文では,キャリア波ベースの手法を採用する。
図 3.4 に本論文で採用する PWM 制御法における 5 レベルインバータのキャリア波と
40
第3章
5 レベルダイオードクランプインバータの動作原理と技術動向
表 3.2: 転流時のスイッチング・リカバリ損失発生素子 (iO > 0)
commutation turn-on loss
turn-off loss
recovery loss
P2 → P1
N/A
S1
N/A
P2 ← P1
S1
N/A
Dc1
P1 → M
N/A
S2
N/A
P1 ← M
S2
N/A
Dc2
M → N1
N/A
S3
N/A
M ← N1
S3
N/A
Dc3
N1 → N2
N/A
S4
N/A
N1 ← N2
S4
N/A
D8
表 3.3: 転流時のスイッチング・リカバリ損失発生素子 (iO < 0)
commutation turn-on loss
turn-off loss
recovery loss
P2 → P1
S5
N/A
D1
P2 ← P1
N/A
S5
N/A
P1 → M
S6
N/A
Dc4
P1 ← M
N/A
S6
N/A
M → N1
S7
N/A
Dc5
M ← N1
N/A
S7
N/A
N1 → N2
S8
N/A
Dc6
N1 ← N2
N/A
S8
N/A
相電圧指令値 e∗ を示す。4 つのキャリア波 vtri1 , vtri2 , vtri3 , vtri4 はすべて振幅 (peak-to-
peak) が Vdc であり,分圧コンデンサ 1 台分の電圧に対応する。相電圧 e と指令値 e∗ の
関係は次式で表される。
2Vdc
Vdc
0
e=
−Vdc
−2Vdc
(vtri1 ≤ e∗ )
(vtri2 < e∗ ≤ vtri1 )
(vtri3 < e∗ ≤ vtr2 )
(vtri4 < e∗ ≤ vtri3 )
(e∗ ≤ vtri4 )
(3.1)
3.2 分圧不均一の発生原理
41
e∗
2Vdc
vtri1
Vdc
vtri2
0
vtri3
−Vdc
vtri4
−2Vdc
図 3.4: キャリア波と相電圧指令値 e∗
3.2
分圧不均一の発生原理
5 レベルインバータに有効電力が流入・流出する場合,直流リンク電圧の分圧不均一
が発生する [52]。この分圧不均一とは,直流リンクにおける 4 台の分圧コンデンサ電圧
の直流平均値が等しくならない現象であり,周期的な電圧変動を対象としているのでは
ない。図 3.5 に分圧不均一の発生原理に着目した 5 レベルインバータの等価回路を示す。
ここで,5 レベルインバータは 5 極スイッチで表している。また,電源側を 2Vdc で分圧
し電源中性点 MS を設け,ハーフブリッジの構成としている。5 レベルインバータの出
力には抵抗負荷を接続し,有効電力が流出する状態としている。4 台の分圧コンデンサ
はすべて Vdc で初期充電されているとする。節点 P2,P1,M からインバータへ流出す
る電流をそれぞれ iP2 , iP1 , iM とし,節点 N1,N2 へインバータから流入する電流をそ
れぞれ iN1 , iN2 とする。
5 レベルインバータが節点 P2 にクランプされると,抵抗負荷は節点 P2 と電源中性点
の間に並列に接続される状態となる。この場合,出力電圧 vOM は正でありかつ iP2 = iO
であるため,節点 P2 からインバータ側に直流電流が流出する。節点 P1 にクランプされ
る場合も同様に,抵抗負荷は節点 P1 と電源中性点の間に並列に接続される状態となる。
この場合も出力電圧 vOM は正であり,かつ iP1 = iO であるため,節点 P1 からインバー
タ側に直流電流が流出する。節点 M にクランプされる場合は vOM = 0 であるため,節
点 M からは直流電流は流出しない。節点 N1 にクランプされる場合は,vOM は負であり
かつ −iN1 = iO であるため,節点 N1 にインバータ側から直流電流が流入する。節点 N2
にクランプされる場合も同様に,vOM は負でありかつ −iN2 = iO であるため,節点 N2
にはインバータから直流電流が流入する。したがって,すべての正側の節点 (P2 と P1)
第3章
42
5 レベルダイオードクランプインバータの動作原理と技術動向
Five-level diode-clamped inverter
behaving as a five-pole switch
P2
iP2
Cdc1
iP1
2Vdc
P1
Cdc2
iM
MS
iO
Resistive
load
M
vOMs
Cdc3
iN1
2Vdc
N1
Cdc4
N2
iN2
図 3.5: 分圧不均一の原理
からインバータ側に直流電流が流出し,すべての負側の節点 (N1 と N2) にインバータ側
から直流電流が流入する。一方で,中性点 (節点 M) には直流電流は流入・流出しない。
節点 P2 から流出する直流電流と節点 N2 に流入する直流電流は電源側を経由するた
め,分圧コンデンサ電圧には影響を与えない。しかし,節点 P1 と N1 については電源
が接続されていないため,それぞれに流入・流出する直流電流は分圧コンデンサの充放
電に影響する。この結果,内側の分圧コンデンサ (Cdc2 と Cdc3 ) は常に放電され電圧が
低下し,外側の分圧コンデンサ (Cdc1 と Cdc4 ) は常に充電され電圧が上昇する。最終的
に,内側 2 台の分圧コンデンサ Cdc2 と Cdc3 の電圧は零に達する。これは,3 レベルイ
ンバータの分圧コンデンサと同様の状態である。
3.3 分圧不均一の抑制法
43
以上の検討は他のレベル数のダイオードクランプインバータにおいても同様である。
直流リンクの中性点 (節点 M) と電源が接続されている節点を除いて,各節点の電圧は
変動する。したがって,3 レベルインバータは分圧不均一が生じないが,4 レベル以上
のダイオードクランプインバータでは原理的に分圧不均一が生じる。
3.3
分圧不均一の抑制法
本節では,5 レベルインバータの分圧不均一の抑制法に関する先行研究とその技術課
題について概説する。PWM 整流器とダイオード整流器を電源側に使用した場合の抑制
法と,直流電圧均一回路を設置する手法について述べる。結論として,ダイオード整流
器を使用する場合に制約なく分圧不均一を抑制することが不可能であり,制約を解消す
るためには直流電圧均一回路が必要であることを示す。
3.3.1
PWM 整流器を用いる場合
図 3.6 に 5 レベル PWM 整流器を電源側に使用した場合の回路図を示す。これは,つ
まり BTB(Back-To-Back) の構成である。この構成は回生動作か可能になるだけでなく,
電源高調波電流の抑制も実現する。整流器はインバータと逆方向のパワーフローで動
作するため,整流器から節点 P1・N1 に流入・流出する直流電流も,インバータから流
入・流出する直流電流と逆方向である。したがって,節点 P1 では整流器から直流電流
IRP1 が流入し,インバータへ直流電流 IIP1 が流出する。節点 N1 においてはインバータ
から直流電流 IIN1 が流入し,整流器へ直流電流 IRP1 が流出する。したがって,PWM
整流器を用いる場合に分圧コンデンサ電圧を均一化するためには,IRP1 = IIP1 および
IRN1 = IIN1 を満たす必要がある。
PWM 整流器とインバータの変調率が一致している場合は,IRP1 = IIP1 かつ IRN1 = IIN1
が成り立つ [65]。しかし,モータドライブの場合はインバータの変調率が大きく変化す
る。文献 [65] では,PWM 整流器・インバータ双方に零相電圧を重畳することで,PWM
整流器とインバータの変調率が異なる場合においても各節点から PWM 整流器とイン
バータに流入・流出する直流電流を調整し,変調率 0.95 以下の領域において IRP1 = IIP1
かつ IRN1 = IIN1 を実現できることを実証している。
44
第3章
5 レベルダイオードクランプインバータの動作原理と技術動向
IRP1
IIP1
P1
M
IRN1
IIN1
N1
図 3.6: PWM 整流器を使用した場合 (BTB)
3.3.2
ダイオード整流器を用いる場合
図 3.7 にダイオード整流器を電源側に使用した場合の回路図を示す。PWM 整流器を
使用した場合とは異なり,節点 P1・N1 に流入・流出する直流電流はインバータのみか
ら発生する。したがって,IIP1 = 0 かつ IIN1 = 0 に制御できない限り分圧不均一の抑制
は不可能である。ただし,三相インバータの構成の場合はスイッチングモードの自由度
を利用することで分圧不均一を抑制する手法が検討されている。以下ではその代表的な
例について述べる。
文献 [62] では空間ベクトル変調を用いて分圧不均一を抑制する手法と,その理論限界
について検討している。分圧不均一が抑制できる領域は,インバータの負荷力率と変調
率に依存することが明らかにされている。特に,負荷力率 1 では変調率 0.55 以下の領域
でしか分圧不均一を抑制できない。一方,文献 [64] では空間ベクトル変調を応用した手
法を用いて,分圧不均一を抑制できる範囲に制約のない変調法が提案されている。しか
し,この手法はインバータ出力電圧が分圧コンデンサ 2 台分以上の電圧ステップとなる
スイッチングを許容しているため,出力電圧の THD の悪化とサージ電圧の増加を招く。
結論として,ダイオード整流器を電源側に用いる場合は分圧不均一の抑制に必ず制約
3.4 直流電圧均一回路
45
IIP1
P1
M
IIN1
N1
図 3.7: ダイオード整流器を使用した場合
が発生する。これは,前節で述べたとおり IIP1 と IIN1 は有効電力が流出する際に原理的
に発生するため,制御法の工夫によって解消することが実用上できないことを意味して
いる。
3.4
3.4.1
直流電圧均一回路
基本構成
図 3.8 に直流電圧均一回路の基本構成を示す。直流電圧均一回路は直流リンクに設置
し,節点 P1 からインバータへ流出する直流電流 IIP1 と節点 N1 へインバータから流入
する直流電流 IIN1 を補償するように直流電流 IBP1 と IBN1 を各節点に供給する。直流電
圧均一回路はインバータとは独立に分圧コンデンサ電圧を制御できるため,信頼性が高
く,電圧制御の制約がない点に特長がある。反面,素子数の増加にともない重量・体積・
コスト増大のおそれがある。
5 レベルインバータを無効電力補償装置に応用する場合,直流電圧均一回路は 5 レベ
ルインバータ内で発生する損失分のみを補償する電力を供給する [59]。一方で,モータ
第3章
5 レベルダイオードクランプインバータの動作原理と技術動向
DC-voltage-balancing circuit
46
IBP1
IIP1
P1
M
IBN1
IIN1
N1
図 3.8: 直流電流均一回路を付加した構成
ドライブの場合 5 レベルインバータから流出する有効電力に依存して直流電圧均一回路
の電流定格が定まる [52]。
3.4.2
チョッパ回路を用いた直流電圧均一回路
図 3.9 に 2 台のチョッパ回路を用いた直流電圧均一回路を示す [50]。正側のチョッパ
回路は IIP1 を補償する直流電流 IBP1 を節点 P1 に流入させている。負側のチョッパ回路
は IIN1 を補償する直流電流 IBN1 を節点 N1 から引き抜いている。
このチョッパ回路を構成するパワーデバイスに着目すると,IGBT・ダイオードとも
ターンオフ時に分圧コンデンサ 2 台分の電圧が印加される。それゆえ,5 レベルインバー
タと同一の耐圧のパワーデバイスを用いるのであれば IGBT・ダイオードとも 2 直列に
する必要がある。アクティブゲートコントロール [114] やゲートバランスコア [115] な
ど,多直列 IGBT の同時スイッチング技術も確立している。しかし,同時スイッチング
技術の導入した場合,ゲートドライブ回路のコストが増加するだけでなく,5 レベルイ
ンバータとゲートドライブ回路の共通化ができない。一方で,ダイオードの多直列につ
3.5 直流電圧均一回路の電流定格
47
IBP1
IIP1
P1
M
IBN1
IIN1
N1
図 3.9: 2 台のチョッパ回路を用いた直流電圧均一回路 [50]
いてはスナバ回路の適用により電圧分担の均一化が可能である。
また,チョッパ回路の導入にあたっては,インダクタの重量・体積が問題となる。
チョッパ回路のインダクタは,IGBT がオンしている場合は電磁エネルギーを蓄積し,
オフしている場合はインダクタ電流がダイオードに転流し,蓄積エネルギーを放出する
ことで連続通流を維持する。つまり,インダクタはエネルギー蓄積要素として動作する。
インダクタ体積は蓄積エネルギーに比例するため,インダクタ体積の小型化を達成する
ためには,蓄積エネルギーの低減が必要である。これはスイッチング周波数の高周波化
により実現できるが,現行の 4.5 kV IGBT のスイッチング周波数は 1 kHz 以下である。
それゆえ,スイッチング周波数の高周波化によるインダクタの小型・軽量化は難しい。
一方で,共振形スイッチトキャパシタコンバータを用いた直流電圧均一回路も検討さ
れている [110–113]。
3.5
直流電圧均一回路の電流定格
直流電圧均一回路の導入にあたっては,その電流定格に注意する必要がある。直流電
圧均一回路の電流責務は 5 レベルインバータの出力電流だけでなく変調率にも依存する。
第3章
48
5 レベルダイオードクランプインバータの動作原理と技術動向
そのため,5 レベルインバータが定格の出力電力となる動作点と,直流電圧均一回路の
電流責務が最大となる動作点は異なる。以下では,変調率変化時の各節点に流入する直
流電流を解析し,直流電圧均一回路の電流定格を明らかにする。
3.5.1
節点 P1 に流入,節点 N1 から流出する直流電流の解析
直流電圧均一回路の電流定格は節点 P1 に流入する直流電流 IP1 および節点 N1 から
流出する直流電流 IN1 で決定される。5 レベルインバータは正側・負側で対称であり,
IP1 = IN1 が成立するため,以下では IP1 のみを解析する。節点 P1 の通電率 DP1 ,相電
圧指令値 e∗ ,出力電流 iO から理論的に IP1 を導出する。通電率とはキャリア周波数が
インバータ出力周波数に比べ十分高いと仮定した場合の出力電流 iO が 1 つの節点に流
入・流出する比を表している。したがって,節点 P1 に流入する直流電流 IP1 は DP1 と
iO の積の平均値で求められる。
IP1
3
=
TO
∫
TO
DP1 · iO dt
(3.2)
0
ここで,TO は出力電流の 1 周期である。三相すべてのレグに流入する電流を考慮して
いるため,(3.2) 式には係数 3 を付加している。また,通電率 DP1 は次式で与えられ
る [58–61]。
DP1
(−2Vdc ≤ e∗ < 0)
0
e∗ /Vdc
(0 ≤ e∗ < Vdc )
=
−e∗ /Vdc + 2 (Vdc ≤ e∗ ≤ 2Vdc )
(3.3)
相電圧指定値 e∗ を次式で与える。
e∗ = 2Vdc · MI sin ωO t
(3.4)
ここで,MI は変調率,ωO = 2πfO , fO = 1/TO である。出力電流 iO は有効電流成分 Id
と無効電流成分 Iq に分離して次式で与える。
√
iO = 2IO sin(ωO t + ϕ)
√
√
= 2Id sin ωO t + 2Iq cos ωO t
(3.5)
e∗ ≤ Vdc が常に成り立つ場合,つまり MI ≤ 0.5 において (3.2)–(3.5) 式から IP1 は次
3.5 直流電圧均一回路の電流定格
49
1.2
1.0
0.8
IP1
Id 0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1.0
1.2
Modulation index, MI
図 3.10: 節点電流 IP1 の理論解析
式で表される。
IP1
∫ TO /2 ∗
3
e
=
· iO dt
TO 0
Vdc
∫ TO /2
(√
)
√
3
=
(2MI sin ωO t) ·
2Id sin ωO t + 2Iq cos ωO t dt
TO 0
√
3 2
=
MI Id
2
一方で,MI > 0.5 の場合において,e∗ = Vdc となる時間を Tth とすると,
(
)
1
ωO Tth = arcsin
2MI
(3.6)
(3.7)
ただし,0 ≤ ωO Tth < π/2 とする。(3.2)–(3.5) 式から IP1 は次式で表される。
}
{∫
)
∫ TO /2−Tth (
∫ TO /2
Tth
3
e∗
e∗
e∗
IP1 =
· iO dt +
−
+ 2 iO dt +
· iO dt
TO
Vdc
Vdc
0
Tth
TO /2−Tth Vdc
[√
]
√
3
2
=
MI {4ωO Tth − 2 sin(2ωO Tth ) − π} + 2 2 cos ωO Tth · Id
(3.8)
π 2
(3.6) 式および (3.8) 式は Iq を含まない。これは,5 レベルインバータから流出する有効
電流のみが分圧不均一を引き起こし,無効電流には依存しないことを示している。
図 3.10 に (3.6),(3.8) 式から求めた変調率 MI -IP1 特性を示す。IP1 は Id で規格化し
た値を示している。モータドライブでは過変調域でインバータを運転する場合があるた
第3章
50
5 レベルダイオードクランプインバータの動作原理と技術動向
0.4
0.3
IP1
Idmax 0.2
0.1
0
0
0.2
0.4
0.6
0.8
1.0
1.2
Modulation index, MI
図 3.11: 2 乗低減トルク負荷の IP1 -MI 特性
め,1 < MI < 1.155 において 3 次零相電圧を重畳した場合の解析結果も示している。こ
こで,3 次零相電圧指令値 e∗3rd は次式で与えている [61]。
e∗3rd = 2Vdc · 1.24(MI − 1) sin 3ωO t
(3.9)
ただし,3 次零相電圧を重畳した場合は IP1 を解析的に求めることが困難であるため,
(3.2) 式を数値計算によって算出した。IP1 /Id は MI = 0.55 において最大値 1.09 を取る。
定トルク負荷では Id 一定と見なせるため,この最大値が直流電圧均一回路の電流定格を
決定する。
3.5.2
2 乗低減トルク負荷における電流定格
2 乗低減トルク負荷では,Id が出力周波数 fO の 2 乗に比例すると見なせるため,モー
タの基底周波数を fB として次式で表される。
(
Id =
fO
fB
)2
· Idmax
(3.10)
ここで,Idmax は定格出力電流時の有効電流成分である。V /f 一定制御を用いる場合,変
調率は出力周波数に比例する。そのため (3.11) 式は次式に変形できる。
(
Id =
MI
MIB
)2
· Idmax
(3.11)
3.6 6.6 kV 高圧モータドライブへの応用例
51
ここで,MIB は基底周波数 fB における変調率である。ダイオード整流器を採用する場合
は,3 次零相電圧を重畳し MI = 1.15 としてもインバータ出力電圧は電源電圧の 95%程
度である [61]。そのため,MI = 1.15 において fO = 0.95fB として解析する。
図 3.11 に 2 乗低減トルク負荷の IP1 -MI 特性を示す。MI = 0.85 において最大値
IP1 /Idmax = 0.37 を取る。したがって,直流電圧均一回路の電流定格はインバータの電
流定格の 37%である。
3.6
6.6 kV 高圧モータドライブへの応用例
3.6.1
6.6 kV トランスレス直接受電
図 3.12 に 5 レベルインバータを用いた 6.6 kV 1 MW トランスレス・モータドライブ
の回路構成例を示す。電源側は 6 パルスダイオード整流器を採用している。5 レベルイ
ンバータの直流リンクには第 5 章で提案する結合インダクタを用いた直流電圧均一回路
を設置している。ダイオード整流器が発生する電源高調波電流の抑制のため,ハイブ
リッドフィルタを併用している [69, 70]。
5 レベルインバータの直流リンク電圧は 9 kV 程度であり,電流定格は 87 A (=
√
1MW /6.6kV / 3) である。2 乗低減トルク負荷を駆動する場合,直流電圧均一回路の電流
定格は 32 A (インバータ電流定格の 37%) である。定トルク負荷の駆動では,第 6 章で
述べる 9 次零相電圧重畳を適用する場合,直流電圧均一回路の電流定格は 76 A (87%) で
ある。
5 レベルインバータは 24 の IGBT モジュール (IGBT とその還流ダイオード (FWD)
の一組) と,36 のクランプダイオードから構成されている。直流電圧均一回路は 4 つの
IGBT モジュールと 6 つのダイオードから構成されている。直流電圧均一回路は 5 レベ
ルインバータに比べ電流定格が小さいだけでなく,素子数も大幅に少ない。それゆえ,
直流電圧均一回路を設置する場合に懸念されるコストと損失の増加は十分小さいと予想
できる。
第3章
52
5 レベルダイオードクランプインバータの動作原理と技術動向
DC-Voltage-Balancing
Circuit
6.6 kV
6.6 kV
1 MW
PCC
M
LS
Lac
Passive
Filter
250 kVA
(25%)
1.3 kV
(20%)
Active Filter
60 kVA (6%)
図 3.12: 6.6 kV 1 MW トランスレス・モータドライブシステムの構成例
3.6.2
22 kV 受電モータドライブ
図 3.13 に 6.6 kV 10 MW モータドライブの回路構成例を示す。6.6 kV 配電系統の容量
は 2 MVA 程度に限定されているため,それを超える大容量のモータドライブでは 22 kV
以上の系統から受電する必要がある。この場合,電圧整合のため変圧器が必要であるが,
コストと信頼性の観点から単純な巻線構造の変圧器が望ましい。そのため,∆-∆-Y また
は Y-Y-∆ 変圧器を採用し,12 パルスダイオード整流器としている。この変圧器は千鳥
結線を必要としないため,2 巻線変圧器 (∆-∆ または ∆-Y) とほぼ同等のコスト・信頼
性が期待できる。12 パルスダイオード整流器は電源高調波電流を低減できるため,ハイ
ブリッドフィルタの所要容量は 6 パルスダイオード整流器を用いる場合よりも低減でき
る [71]。
√
5 レベルインバータの電流定格は 870 A (= 10MW /6.6kV / 3) である。2 乗低減トル
ク負荷を駆動する場合,直流電圧均一回路の電流定格は 320 A (インバータ電流定格の
37%) である。定トルク負荷の駆動では,9 次零相電圧重畳を適用すると直流電圧均一回
3.6 6.6 kV 高圧モータドライブへの応用例
53
DC-Voltage-Balancing
Circuit
6.6 kV
10 MW
22 kV
M
LS
6.6 kV
Passive
Filter
800 kVA
(8%)
460 V
(7%)
Active Filter
80 kVA (0.8%)
図 3.13: 6.6 kV 10 MW モータドライブシステム (22 kV 受電) の構成例
路の電流定格は 760 A (87%) である。
55
第4章
クランプダイオードを付加した直流電圧
均一回路
本章では,2 直列 IGBT にクランプダイオードを付加した直流電圧均一回路を提案す
る。提案回路では IGBT の同時スイッチング技術を用いることなく,2 直列 IGBT の電
圧分担を均一化する。それゆえ,インバータ側とゲートドライブ回路の共通化が実現で
きる。まず,提案回路の動作原理を説明し,実験では 200 V,5.5 kW ミニモデルを用い
てその有効性を実証する。
4.1
4.1.1
回路構成と基本原理
回路構成
図 4.1 にクランプダイオードを付加した直流電圧均一回路を示す。これは,正側と負
側の 2 直列 IGBT にそれぞれクランプダイオード DB1 と DB4 を接続した回路構成であ
る。正側と負側のチョッパ回路は対称の構成であるため,以下では正側のチョッパ回路
にのみ着目して説明する。負側のチョッパ回路については,Q1 を Q4 に,Q2 を Q3 に,
DB1 を DB4 に,DB2 を DB3 に,LP を LN にそれぞれ置き換えて考えれば良い。
図 4.2 に直流電圧均一回路のスイッチングシーケンスを,図 4.3 に各 period での動作
を示す。インダクタ電流 iLP が連続通流であるとすると,まず,period 1 では Q2 のみ
がオンしているため,iLP は LP ,DB1 ,Q1 を循環するように流れる。このとき,オフし
ている Q1 のコレクタ‐エミッタ間電圧 vCE1 は分圧コンデンサ 1 台分と等しい。次に,
period 2 では Q1 がターンオンするため P1 へ電流が流れる。また,period 3 は period 1
と同一の動作状態である。最後に,period 4 では Q2 がターンオフするが,Q2 の出力容
56
第4章
クランプダイオードを付加した直流電圧均一回路
P2
Q1
DB1
Q2
P1
LP
DB2
M
DB3
LN
N1
Q3
Q4
DB4
N2
図 4.1: クランプダイオードを付加した直流電圧均一回路
Q1
ON
Q2
ON
period 1
T1
2
T2
3
T3
4
T4
TS
図 4.2: 直流電圧均一回路のスイッチングシーケンス (正側)
量が充電され vCE2 が vP1−M に達するまでは DB1 はターンオフせずに電流を流し続ける。
vCE2 が vP1−M に達した後,DB1 はターンオフし,vCE2 = vP1−M を維持したままインダ
クタ電流は DB2 に転流する。そのため,period 4 において Q1 ,Q2 のコレクタ‐エミッ
タ電位は等しく,分圧コンデンサ 1 台分の電圧となる。
このように,どの period においても Q1 ,Q2 の印加電圧は分圧コンデンサ 1 台分で済
4.1 回路構成と基本原理
57
P2
Q1
vCE1
Q2
vCE2
DB1
iLP
P1
P2
Q1
vCE1
Q2
vCE2
DB1
P1
iCP
LP
LP
iLP
DB2
DB2
iCP
M
M
(a) period 1
(b) period 2
P2
Q1
vCE1
Q2
vCE2
DB1
iLP
P1
P2
Q1
vCE1
Q2
vCE2
DB1
P1
iCP
LP
LP
DB2
DB2
iCP
iLP
M
(c) period 3
M
(d) period 4
図 4.3: 各 period における動作状態
むため,インバータと同耐圧の IGBT を利用できる。
一方で,アクティブゲートコントロール [114] やゲートバランスコア [115] など多直列
IGBT の同時スイッチング技術も確立している。提案回路ではアクティブゲート駆動技
術に比べ,以下の特長を有する。
• 5 レベルインバータのゲート駆動回路と共通化が可能。
• DB2 逆電圧が 1/2 となり,リカバリ電流を低減可能。
4.1.2
T1 と T3 の決定
提案回路が従来のチョッパ回路と大きく異なる点は,インダクタ電流 iLP が節点 P1 に
流入しない期間 T1 と T3 である。ここで,直流リンク電圧が定常偏差なく制御されてい
第4章
58
クランプダイオードを付加した直流電圧均一回路
るとすると,iLP と iP1 それぞれの直流成分 ILP と IP1 には以下の関係が成立する。
TS − (T1 + T3 )
· ILP = IP1
TS
(4.1)
(4.1) 式は直流電圧均一回路から P1 に流入する直流電流が,P1 からインバータに流出
する直流電流と一致することを意味している。ここで,スイッチング 1 周期 T に T1 と
T3 が占める割合を ∆D ≡ (T1 + T3 )/TS と定義する。これは,Q1 と Q2 のディーティ比
の差を意味する。∆D を用いて (4.1) 式を変形すると次式で表わされる。
ILP =
1
· IP1
1 − ∆D
(4.2)
クランプダイオードを接続しない従来のチョッパ回路では ∆D = 0 と考えることがで
きるため,提案回路では ILP が増加する。それゆえ,∆D は可能な限り小さいことが望
まれる。しかし,2 直列 IGBT がターンオン・オフするタイミングに差異があれば電圧
分担を等しくできると考えられるため,T1 ,T3 はそれぞれスイッチング素子のターン
オン・オフ時間と同程度とすれば十分である。4.5 kV IGBT を採用し,スイッチング
周波数を 1 kHz 程度とした場合,ターンオン・オフ時間はそれぞれ 5 µs 程度であるた
め [136], ∆D = 0.01 程度となる。この場合,従来のチョッパ回路に比べ ILP の増加は
1 %程度である。
4.1.3
インダクタ電流断続モードにおける動作
モータの負荷が軽い場合や始動時に,IP1 と IN1 が小さくインダクタ電流断続モードと
なる可能性がある。電流断続モードでの運転では,period 4 の期間中にインダクタ電流
は零に達し,ダイオード DB2 がオフする。このとき,DB2 には分圧コンデンサ 1 台分の
電圧が印加されるため,vCE1 , vCE2 は低下する。したがって,インダクタ電流断続モー
ドにおいても Q1 , Q2 の印加電圧は分圧コンデンサ電圧 1 台分を超過しない。
4.1.4
直流電圧均一回路の制御法
図 4.4 に正側の直流電圧均一回路の制御ブロックを示す。正側と負側の制御は独立に
行う。また,負側の制御系も正側と同様である。電圧制御には PI 制御を用い,インダ
クタ電流の振動を防ぐために電流マイナーループを設けた。キャリア周波数は 3 kHz と
し,一方の IGBT(Q2 または Q3 ) のみがオンする期間を T1 = T3 = 5 µs とした。
4.2 実験結果
59
Voltage
regulator
vP2−P1
+
PI
−
Current
regulator
+
vP1−M
−
iLP
P
Comparators
+
Q1
+
1
v
2 P2−M
T1 , T3
+ +
Carrier signal
(3 kHz)
Q2
図 4.4: 直流電圧均一回路制御ブロック
4.2
実験結果
4.2.1
実験システム構成
図 4.5 に実験システムの回路構成を,表 4.1 に定格と回路定数を示す。パワーデバイ
スは直流電圧均一回路,5 レベルインバータどちらも 600 V IGBT,600 V ダイオード
を使用している。5 レベルインバータは誘導電動機 (IM) に直結し,カップリングした永
久磁石同期発電機 (SG) と Y 結線の負荷抵抗により負荷トルクを調整している。次式に
示すように,ファン・ブロワ (2 乗低減トルク) 負荷を模擬するためインバータ出力電力
PO がインバータ出力周波数 fO の 3 乗に比例するよう負荷抵抗を調整した。
( )3
fO
PO =
× 5.5 [kW]
60
(4.3)
誘導電動機の制御には V /f 一定制御 (200 V/60 Hz) を採用し,変調率指令値 MI∗ から一
意的に出力相電圧指令値と出力周波数指令値を決定する。また,変調率 1 < MI ≤ 1.15
において電圧利用率拡大のため 3 次調波重畳を行なっている [61]。中性点 (節点 M) 電
位は直流零相電圧重畳によって制御している [48, 61]。直流電圧均一回路・5 レベルイン
バータとも制御系は DSP・FPGA をベースとした全ディジタル制御システムを採用し
ている。
図 4.5 には図示していないが,直流リンクに初期充電回路を設置した。4 台の分圧コン
デンサ電圧が 68 V に達した後に初期充電回路を切り離し,実験システムを起動した。
第4章
60
200 V
50 Hz
Lac
クランプダイオードを付加した直流電圧均一回路
DC-voltage-balancing
Diode
circuit
rectifier
P2
Ldc /2
Q1
DB1
Cdc
Q2
LP
P1
iLP
iCP
DB2
Cdc
Five-level diode-clamped
inverter
S1
S2
iP1
S3
200 V
5.5 kW
S4
M
iS
DB3
IM
S5
iLN
Cdc
S6
N1
Q3
Ldc /2
Q4
LN
DB4
SG
iO
iCN
Cdc
iN1
S7
Star-connected
resistive load
S8
N2
4
MI∗
Calculation
(DSP)
24
PWM
(FPGA)
A/D
4
図 4.5: 200-V 5.5-kW 実験システム
4.2.2
2 直列 IGBT の電圧分担
図 4.6 に Q1 ,Q2 のコレクタ–エミッタ電圧 vCE1 , vCE2 とインダクタ電流 iLP の実験波
形を示す。(a) は変調率 MI = 0.5,出力電力 PO = 390 W とし,インダクタ電流連続モー
ドで運転させた場合の実験結果である。一方,(b) は MI = 0.05,PO = 20 W とし,イ
ンダクタ電流断続モード運転させた場合の実験結果である。
インダクタ電流連続モードにおいて,vCE1 ,vCE2 ともに分圧コンデンサ 1 台分 (68 V
程度) の電圧がオフ時に印加された。一方,インダクタ電流断続モードにおいても,vCE1
と vCE2 は分圧コンデンサ 1 台分の電圧を超過しなかった。注 1 。
4.2.3
∆D によるインダクタ電流の増加
図 4.7 に Q1 と Q2 のデューティ比の差 ∆D を変化させた場合のインダクタ電流 ILP の
実験結果と,(4.2) 式から算出した理論曲線を示す。ILP は IP1 で規格化した値を示して
注1
インダクタ電流断続モードでは,スイッチング素子のオフ時の印加電圧は低下する。
4.2 実験結果
61
表 4.1: 定格と回路定数
Power rating
P
5.5 kW
Nominal ac voltage
VS
200 V
Rated ac current
IS
16 A
Inductance of ac link inductior
Lac
1.2 mH (5.2 %)
Inductance of dc link inductior
Ldc
0.56 mH (2.4 %)
Average DC capacitor voltage
Vdc
68 V
Split dc capacitor
Cdc
10 mF
4Vdc
270 V
DC link voltage
Unit capacitance constant [116]
Chopper inductor
H
LP = LN
17 ms (270 V)
4.2 mH
Carrier frequency
fC
3 kHz
on a three-phase, 50-Hz, 200-V, 5.5-kW, 16-A base
いる。実験結果は理論曲線とほぼ一致した。
4.2.4
誘導電動機駆動時の実験結果
図 4.8 に変調率 MI = 1.15,出力周波数 fO = 57.5 Hz,出力電力 PO = 4.7 kW におけ
る実験結果を示す。相電圧は 5 レベルの,線間電圧は 9 レベルの波形であった。インダ
クタ電流に出力周波数の 3 倍の周波数の脈動が発生していたが,これは,各節点に流入・
流出する電流が出力周波数の 3 倍の周波数で脈動することに起因する [48]。各節点に流
入・流出する電流の脈動は,各分圧コンデンサ電圧も脈動を引き起こし,図 4.4 に示す電
圧制御 (PI ゲイン) を介しインダクタ電流指令値にも脈動を誘発する。これは,電圧制御
の比例ゲインを低く設定することで軽減可能である。図 4.9 に MI = 0.8,fO = 40 Hz,
PO = 1.6 kW における実験結果を示す。これは,ファン・ブロワ負荷の場合にインダク
タ電流の直流平均値が最大となる条件である [61]。図 4.10 に MI = 0.5,fO = 25 Hz,
PO = 0.39 kW における実験結果を示す。変調率が低いため,相電圧は 3 レベル,線間電
圧は 5 レベルの波形であった。また,表 4.2 に各実験結果での 4 台の分圧コンデンサ電
圧の平均値を示す。4 台の分圧コンデンサ電圧は均一に制御され,各電圧の偏差は 1%以
第4章
62
クランプダイオードを付加した直流電圧均一回路
表 4.2: 図 4.8–4.10 における各分圧コンデンサ電圧直流平均値
VP2−P1
VP1−M
VM−N1
VN1−N2
MI = 0.5
69.0 V
68.3 V
69.1 V
68.9 V
MI = 0.8
67.3 V
67.2 V
67.6 V
67.5 V
MI = 1.15
64.9 V
64.9 V
65.3 V
65.1 V
下である。
4.3
第 4 章まとめ
本章では,チョッパ回路にクランプダイオードを付加した新しい直流電圧均一回路を
提案した。200 V 5.5 kW ミニモデルを用いた実験によって,2 直列に接続した各 IGBT
の電圧分担が等しく分圧コンデンサ 1 台分の電圧となることを確認した。また,分圧不
均一の抑制効果を実証した。
4.3 第 4 章まとめ
63
6
iLP
[A]
4
2
0
100
vCE1
[V]
50
0
100
vCE2
[V]
50
0
0.2 ms
(a) MI = 0.5, PO = 390 W,インダクタ電流連続モード
6
iLP
[A]
4
2
0
100
vCE1
[V]
50
0
100
vCE2
[V]
50
0
0.2 ms
(b) MI = 0.05, PO = 20 W,インダクタ電流断続モード
図 4.6: コレクタ–エミッタ間電圧 vCE1 , vCE2 実験波形
第4章
64
クランプダイオードを付加した直流電圧均一回路
1.25
Theory
ILP /IP1
1.20
Experiment
1.15
1.10
1.05
1.00
0
0.05
0.10
∆D
0.15
0.20
図 4.7: インダクタ電流直流平均値 – ∆D 特性
4.3 第 4 章まとめ
65
150
vu
[V]
0
−150
300
vuv
[V]
0
−300
30
iO
[A]
0
−30
150
vP2−M
vP1−M
[V]
0
vN1−M
vN2−M
−150
10
iLP
[A]
0
10
iLN
[A]
0
10 ms
図 4.8: MI = 1.15 における実験波形
第4章
66
クランプダイオードを付加した直流電圧均一回路
150
vuM
[V]
0
−150
300
vuv
[V]
0
−300
30
iO
[A]
0
−30
150
vP2−M
vP1−M
[V]
0
vN1−M
vN2−M
−150
10
iLP
[A]
0
10
iLN
[A]
0
10 ms
図 4.9: MI = 0.8 における実験波形
4.3 第 4 章まとめ
67
150
vu
[V]
0
−150
300
vuv
[V]
0
−300
30
iO
[A]
0
−30
150
vP2−M
vP1−M
[V]
0
vN1−M
vN2−M
−150
10
iLP
[A]
0
10
iLN
[A]
0
10 ms
図 4.10: MI = 0.5 における実験波形
69
第5章
結合インダクタを用いた直流電圧均一回路
本章では,ダイオード整流器・5 レベルインバータを採用したモータドライブに適用
する直流電圧均一回路の小型・軽量化を目的とした,新しい直流電圧均一回路を提案す
る。これは,エネルギー蓄積要素として動作しない結合インダクタを採用する点に特長
がある。以下では,結合インダクタを用いた直流電圧均一回路の動作原理を説明し,実
験では 200 V, 5.5 kW ミニモデルによってその有効性を確認する。また,インダクタ体
積について定量的な検討を行い,非結合インダクタを用いる場合と比較してインダクタ
体積を 1/6 程度に低減できることを明らかにする。
5.1
5.1.1
回路構成と基本原理
回路構成
PFC 整流器に用いる多重チョッパの低損失化・小型化を目的として,文献 [117, 118]
では,結合インダクタを採用した回路構成が提案されている。本論文ではこの手法を 5
レベルインバータの直流電圧均一回路に応用する。
図 5.1 に提案する直流電圧均一回路を設置したモータドライブシステムの回路構成を
示す。第 4 章で検討した直流電圧均一回路 (以下,先行回路と称す。) では正側・負側に
独立なチョッパ回路を接続したが,提案回路では正側・負側のチョッパ回路のインダク
タを結合させている点が特長である。この結合インダクタ LC の巻数比は 1 : 1 である。
また,後述する発電制動用の抵抗を接続している。
図 5.2 に提案回路の動作を示す。ここで,結合インダクタ LC は励磁インダクタンス
LM と漏れインダクタンス ℓP , ℓN に分けて表示している。代表的なスイッチングモード
第5章
70
結合インダクタを用いた直流電圧均一回路
Diode DC-Voltage-balancing
circuit
9 kV
rectifier
P2
LC
Five-level Diode-Clamped
inverter
Braking
resistors
Cdc1
P1
Cdc2
M
M
6.6 kV
Cdc3
N1
Cdc4
N2
0
図 5.1: 結合インダクタを用いた直流電圧均一回路を設置したモータドライブシステム
は,正側のスイッチ群 Q1 , Q2 がオンする mode A と,負側のスイッチ群 Q3 , Q4 がオン
する mode B から成る注 1 。まず,mode A では正側のスイッチ群 Q1 , Q2 がオンしてい
るため,ℓP が十分小さいとすれば結合インダクタの正側巻線には vP2−P1 が印加され,
vMP ≈ vP2−P1 である。この電圧は負側巻線にも発生するため,vMN ≈ vP2−P1 である。こ
の場合,DB3 がオンしているため,負側巻線に発生した電圧は Cdc3 を充電する。つま
り,mode A において Cdc1 を放電し,そのエネルギーを結合インダクタを介し負側に伝
達し,Cdc3 を充電する。一方,mode B も同様に,Cdc4 を放電し,そのエネルギーを結
合インダクタを介し正側に伝達し,Cdc2 を充電する。このように,結合インダクタ LC
はトランスとして動作する注 2 。この 2 つのモードを交互に繰り返すことによって,外側
2 台の分圧コンデンサは放電,内側 2 台の分圧コンデンサは充電され 4 台の分圧コンデ
ンサ電圧が均一化される。
注1
注2
図 5.2 において,後述するように実際には DB1 または DB4 がオンし,インダクタ巻線電流が還流
するモードが短期間存在するが,ここでは基本的な原理のみを考えているため省略している。
LC は動作の観点からはトランスであるが,各巻線電流が直流成分を含む点がトランスとは異なる
ため,本論文では結合インダクタと呼ぶ。
5.1 回路構成と基本原理
71
P2
Q1
Q2
vℓP
vMP
P2
Q1
DB1
iLP
Cdc1
DB1
Q2
ℓP
LM
vℓP
vMP
P1
ℓP
LM
DB2
DB2
Cdc1
P1
iLP
Cdc2
Cdc2
M
M
DB3
iLN
DB3
ℓN
Q3
Q4
vMN
Cdc3
ℓN
N1
vℓN
Q3
DB4
Cdc4
Q4
iLN
vMN
N1
vℓN
DB4
Cdc4
N2
N2
(a) mode A
Cdc3
(b) mode B
図 5.2: 直流電圧均一回路の基本的な動作モード
5.1.2
漏れインダクタンスの必要性
図 5.3(a) に mode A における結合インダクタの励磁インダクタンス LM と漏れインダ
クタンス ℓP , ℓN の印加電圧に着目した等価回路を示す。ここで,Q1 と Q2 の飽和電圧
の和を VQsum ,DB3 の順電圧降下の和を VDsum とする。正側には分圧コンデンサ電圧か
ら Q1 と Q2 の飽和電圧を減算した電圧が印加されているが,負側は分圧コンデンサ電
圧に DB3 の順電圧降下を加算した電圧が印加される。これは,mode B においても同様
である。結合インダクタの励磁インダクタンスが十分大きく,理想トランスと見なし,
iLP = iLN と仮定すると,図 5.3(b) の様に正側・負側間は短絡と考えられる。さらに,分
圧コンデンサ電圧の偏差がなく vP2−P1 = vM−N1 であるとすると,
|vℓP + vℓN | = VQ + VD
(5.1)
このように,パワーデバイスの電圧降下は漏れインダクタンスに印加される。もし,漏
れインダクタンスが零とすると,正側・負側間で異なる電圧源の短絡となり過電流を引
き起こす。漏れインダクタンスに素子の電圧降下分を印加させることで過電流を防ぐこ
第5章
72
結合インダクタを用いた直流電圧均一回路
vP2−P1 − VQ
vP2−P1 − VQ
iLP
vℓP
vℓP
iLN
vℓN
vℓN
vM−N1 + VD
vM−N1 + VD
(a)
(b)
iLP
iLN
図 5.3: 巻線の印加電圧に着目した結合インダクタの等価回路
Φ
dc component
Φ
0
t
0
(a) 非結合インダクタ
t
(b) 結合インダクタ
図 5.4: インダクタ内の磁束 Φ
とが可能である。iLP と iLN のリプル電流幅,∆ILP と ∆ILN は次式で与えられる。
∆ILP = ∆ILN =
|VQsum + VDsum |
· τ,
ℓP + ℓN
(5.2)
ここで,τ は mode A または mode B の期間である。リプル電流幅 ∆ILP と ∆ILN は漏れ
インダクタンスに反比例し,パワーデバイスの電圧降下に比例する。(5.2) 式を用いて所
望のリプル電流幅を実現する漏れインダクタンスを決定可能である。ただし,分圧コン
デンサ電圧に偏差が残留している場合は漏れインダクタンスに印加される電圧が大きく
なるため,リプル電流幅は増大する。さらに,次節で述べる 2 種類のフィードバック制
御を行う際にも漏れインダクタンスは必要である。
5.1 回路構成と基本原理
5.1.3
73
先行回路との比較
先行回路では,インダクタがエネルギー蓄積要素として動作するが,提案回路では結
合インダクタがエネルギー蓄積要素として動作しない点が大きく異なる。インダクタ体
積は蓄積エネルギーに比例するため,提案回路ではインダクタ体積の小型化が実現でき
る。また,図 5.4 に先行回路と提案回路におけるインダクタのコア内に生じる磁束の模
式図を示す。先行回路では正側・負側それぞれのインダクタ電流と直流成分が含まれる
ため,コア内に発生する磁束にも直流成分が生じる。一方,提案回路では iLP , iLN に
よって生じる磁束が結合インダクタのコア内で相殺される方向に生じるため,直流磁束
を発生しない注 3 [118–121]。そのため,提案回路では先行回路に比べ磁束の最大値が低
減される。これは,同一の磁束密度・同一巻数でコアを設計するならばコアの断面積を
低減可能であり,インダクタを小型化できる。
5.1.4
結合インダクタの巻き方
結合インダクタの正側と負側の各 巻線間には最大で分圧コンデンサ 3 台分の電圧が印
加される。6.6 kV 直接受電した場合では,この電圧は 6.8 kV に達するため,巻線間の
絶縁を考慮する必要がある。巻線間の絶縁の観点からは分布巻よりも集中巻が適してい
る。さらに,漏れインダクタンスが原理的に必要であることからも,集中巻が望ましい。
一般的に,商用周波数変圧器や高周波変圧器では,絶縁の観点からは集中巻が望ましい
が,漏れインダクタンスの低減の観点からは分布巻が適している。本論文で検討してい
る結合インダクタはこのトレードオフは存在せず,集中巻を採用できる点が特長である。
5.1.5
発電制動時の動作
本論文では回生の不要なモータドライブを対象としているが,緊急停止やモータ減速
時に限り制動を必要とする負荷も存在する。このような負荷では一般的に,インバータ
の直流リンクに制動抵抗を接続しモータが回収した回転体のエネルギーを消費する発電
注3
iLP と iLN は節点 P1 と N1 から 5 レベルインバータに流出・流入する電流 iP1 と iN1 によって決
まるが,これらの直流成分は原理的に等しいため,iLP と iLN の直流成分も同一である。したがっ
て,コア内に生じる磁束の直流成分は完全に相殺される。
第5章
74
Q1
ON
Q2
ON
結合インダクタを用いた直流電圧均一回路
Q3
ON
Q4
ON
period
1
2 3 4
5
6 7 8
図 5.5: 直流電圧均一回路のスイッチングシーケンス
制動が用いられている。
結合インダクタを用いた直流電圧均一回路は外側 2 台の分圧コンデンサから内側 2 台
の分圧コンデンサへ電力を送るため,図 5.1 に示すように内側 2 台の分圧コンデンサの
みに制動抵抗を並列接続すれば発電制動を実現できる。つまり,回生時の電力を内側 2
台の分圧コンデンサに集約できる。ただし,直流電圧均一回路の電流定格を超えない範
囲で動作させる必要があり,回生可能な電力に制限が生じる。この制限を超える場合は,
直流電圧均一回路の電流定格を大きく設計するか,外側 2 台の分圧コンデンサにも並列
に制動抵抗を接続する必要がある。
5.2
デューティ比制御
結合インダクタを用いた直流電圧均一回路は,正側・負側の IGBT を交互にオン・オ
フすることで原理的には分圧コンデンサ電圧の均一化が実現できるが,実際にはパワー
デバイスの電圧降下や結合インダクタの抵抗成分などによって電圧偏差が残留する。そ
のため,電圧フィードバック制御を行う必要がある。
5.2.1
スイッチングシーケンス
図 6.8 に直流電圧均一回路のスイッチングシーケンスを示す。これは 8 つの period か
ら成り,負側のスイッチ群 (Q3 と Q4 ) は正側のスイッチ群 (Q1 と Q2 ) に対しスイッチン
グの位相が 180◦ 移相されている。Q1 と Q2 ,Q3 と Q4 のオン時比率が異なるが,これは
5.2 デューティ比制御
Q1
Q2
Q1
DB1
Cdc1
iLP
DB2
Cdc2
DB3
iLN
Cdc3
Q3
Q2
Cdc4
Q1
DB2
Q4
Cdc3
iLN
Q4
Cdc1
iLP
Cdc2
Cdc3
iLN
Q2
Cdc4
(e) period 5
Cdc2
DB3
Q4
Cdc3
iLN
DB3
(f) period 6
Cdc3
iLN
Q2
Cdc4
Q2
Cdc4
Cdc2
DB3
Q4
Cdc3
iLN
DB3
(g) period 7
Cdc3
iLN
DB4
Q4
Q2
Cdc4
Cdc4
DB1
Cdc1
iLP
DB2
Cdc2
DB3
Q3
DB4
Cdc2
Q1
Cdc1
DB2
Cdc1
(d) period 4
DB1
iLP
DB1
iLP
DB2
Q3
DB4
Q4
Q3
DB4
Cdc2
Q1
Cdc1
iLP
Cdc1
iLP
(c) period 3
DB1
DB2
Q3
DB4
Cdc4
Q1
DB1
DB2
Q3
DB4
Q1
DB3
Q3
Cdc2
Q2
(b) period 2
DB1
Q2
Cdc1
iLP
DB3
(a) period 1
Q1
DB1
DB2
Q3
DB4
Q4
75
Cdc3
iLN
DB4
Q4
Cdc4
(h) period 8
図 5.6: 8 つの period のおける直流電圧均一回路の動作モード
IGBT の電圧分担の均一化だけでなく,後述する電圧フィードバック制御を実現するた
めである。図 5.6 に各 period での動作を示す。まず,period 1 の動作モードは図 5.2 に
示した mode A に対応しているため,Cdc1 を放電,Cdc3 を充電している。一方,period 5
の動作モードは mode B に対応しているため,Cdc4 を放電,Cdc2 を充電している。しか
し,この 2 つのモードだけでは,分圧コンデンサ電圧に偏差が残留し,内側の分圧コン
デンサ電圧に比べ外側の分圧コンデンサ電圧が高い状態となる。この電圧偏差を解消す
るためにはさらに内側の分圧コンデンサを充電,あるいは外側の分圧コンデンサを放電
する必要がある。そこで,period 2 と period 8 の挿入によって,結合インダクタを理想
トランスと見なすと,vP2−P1 が漏れインダクタンス ℓP と ℓN に印加され,Cdc1 は放電さ
れる。一方,period 4 と period 6 の挿入によって,vN1−N2 が漏れインダクタンスに印加
され,Cdc4 が放電される。period 2, 4, 6, 8 の動作モードは,フライバックコンバータの
動作と見なせる。これらの period を分圧コンデンサ電圧のフィードバックにより決定す
第5章
76
結合インダクタを用いた直流電圧均一回路
Comparators
vP2−P1
PI
vP1−M
P
1
v
2 P2−M
iLP
on Q1
1
∆D
2
1
∆D
2
Carrier Signal
VtriP
on Q2
TR TR
(a) 正側
Comparators
vN1−N2
PI
vM−N1
P
iLN
Carrier Signal
VtriN
1
v
2 M−N2
on Q1
1
∆D
2
1
∆D
2
on Q2
TR TR
(b) 負側
図 5.7: デューティ比制御ブロック線図
ることで,分圧コンデンサ電圧を均一に制御可能である。また,period 3 と period 7 は
各分圧コンデンサの充放電に寄与しない。
5.2.2
制御ブロック
図 5.7 にデューティ比制御のブロック図を示す。制御系は正側・負側で独立であるが,
負側のキャリア波 VtriN は正側のキャリア波 VtriP に対して位相が 180◦ 異なる。正側・負
側とも電圧制御に PI 制御を採用し,比例ゲインは 0.5 A/V,積分時定数は 50 ms であ
る。さらに,インダクタ電流の振動を防ぐために電流マイナーループを設けている。電
流制御には P 制御を用い,比例ゲインは 0.15 V/A である。正側・負側のスイッチ群に
おいて,一方の IGBT(Q2 または Q3 ) のみがオン状態となり,インダクタ電流が DB1 ま
たは DB4 を介し流れる還流期間を TR とする。この場合,Q1 と Q2 または Q3 と Q4 の
デューティ比の差 ∆D は次式で表される。
∆D =
5.4 節の実験では,∆D = 0.1 としている。
2TR
TS
(5.3)
5.3 位相シフト制御
5.3
77
位相シフト制御
5 レベルインバータの中性点 (節点 M) 電位は原理的に不均一を生じないが,実用上
はパワーデバイス損失や制御系の誤差等に起因して不均一を生じる可能性がある。5 レ
ベルインバータに零相電圧を重畳することで中性点電位を制御する手法が提案されてい
る [48, 61]。しかし,零相電圧重畳は 5 レベルインバータの制御の自由度を制限する。特
に,変調率 1 付近ではインバータ出力電圧の飽和を引き起こすおそれがある。
本節では,直流電圧均一回路に位相シフト制御を導入することで,中性点電位制御を
実現する。前節で述べたデューティ比制御と組み合わせることで,5 レベルインバータ
の制御に頼らず 4 台すべての分圧コンデンサ電圧の均一化を達成する。以下では,直
流電圧均一回路のモデリングを行い,直流電圧均一回路が正側・負側間において双方向
ハーフブリッジ DC/DC コンバータとして動作することを示す。その際,正側・負側間
に生じるパワーフローが正側・負側間の位相シフト角に比例することを明らかにする。
5.3.1
直流電圧均一回路のモデリング
図 5.8 は直流電圧均一回路を正側と負側に分けて表している。正側の回路は左側に,
負側の回路は右側に移動している。ここで,節点 P1 から 5 レベルインバータに流出する
直流電流を IP1 ,節点 N1 から 5 レベルインバータに流入する電流を IN1 とし,それぞれ
電流源で示している。節点 P2・N2 からインバータに流出・流入する電流は直流電圧均
一回路の動作に影響しないため省略している。ここで,クランプダイオード DB1 と DB4
を無視し,フリーホイールダイオード DB2 と DB3 も IGBT と同様に可制御のスイッチと
見なすと,この回路は双方向ハーフブリッジ DC/DC コンバータと見なせる [122, 123]。
正側の IGBT 群 (Q1 と Q2 ) と負側の IGBT 群 (Q3 と Q4 ) は交互にスイッチングしてい
るため,双方向ハーフブリッジ DC/DC コンバータの 2 つの上アーム (Q1 , Q2 と DB3 )
と 2 つの下アーム (DB2 と Q3 , Q4 ) が交互スイッチングを行っている状態と見なせる。
これは,双方向ハーフブリッジ DC/DC コンバータが位相差零で運転している状態であ
る。正側・負側間に位相シフト制御を導入することで,正側 2 台と負側 2 台の分圧コン
デンサ電圧の均一化,つまり中性点電位制御を実現できる。
第5章
78
結合インダクタを用いた直流電圧均一回路
P2
M
DB1
Q1
DB3
IN1
Q2
P1
N1
Q3
DB2
IP1
Q4
M
DB4
N2
図 5.8: 双方向ハーフブリッジ DC/DC コンバータと見なした回路構成
2VQ
2VD iNM
P2
M
Vdc
Vdc
VD + VQ
P1
ℓ
iℓ
VD + VQ
N1
vℓ
Vdc
Vdc
2VD
M
2VQ
N2
iPM
図 5.9: IGBT の飽和電圧とダイオードの順電圧降下を考慮した等価回路
(ℓ = ℓP + ℓN )
5.3.2
正側・負側間のパワーフローの解析
図 5.9 に IGBT の飽和電圧 VQ とダイオードの順電圧降下 VD に着目した直流電圧均一
回路の等価回路を示す。
ここで,分圧コンデンサは電圧源 Vdc としている。左側のレグは節点 P2,P1,M の
いずれかに,右側のレグは節点 M,N1,N2 のいずれかにクランプするスイッチと見な
せる。結合インダクタは,励磁インダクタが漏れインダクタンスより十分大きく無視出
来ると仮定し,正側・負側の漏れインダクタの和 ℓ (= ℓP + ℓN ) のみで表している。ここ
で,漏れインダクタンスの和 ℓ の印加電圧と流入電流をそれぞれ vℓ ,iℓ としている。ま
5.3 位相シフト制御
79
Q1
α
Q2
β
Q3
β
Q4
α
VℓH
vℓ
0
VℓL
iℓ
Iℓ1
Iℓ7
Iℓ5
Iℓ3
Iℓ1
0
Iℓ4
Iℓ2
iNM
Iℓ8
Iℓ6
Iℓ1
Iℓ1
0
Iℓ2
−Iℓ6
iPM
0
period
ωt
−Iℓ5
π
θ1
θ2 θ3 θ4
θ5
θ6 θ7 θ8
1
2 3 4
5
6 7 8
図 5.10: 位相シフトのない場合のスイッチングシーケンスと理論波形
た,正側・負側から節点 M に流入する電流をそれぞれ iPM ,iNM としている。
IP1 と IN1 は正側・負側間のパワーフローに寄与しないため無視している。
図 5.10 と 5.11 にスイッチングシーケンスと理論波形を示す。ここで,α は Q1 または
Q4 の導通角,β は Q2 または Q3 の導通角である。θn (n = 1, 2, · · · 8) は各 period に対応
第5章
80
Q1
α
Q2
β
結合インダクタを用いた直流電圧均一回路
Q3
β
Q4
α
VℓH
vℓ
0
VℓL
Iℓ1
Iℓ1
Iℓ3
iℓ
Iℓ7
Iℓ5
0
Iℓ2
Iℓ8
Iℓ4
Iℓ6
Iℓ1
Iℓ1
iNM
0
Iℓ2
−Iℓ6
iPM
0
−Iℓ5
ωt
π+ϕ
period
θ1
θ2 θ3 θ4
θ5
θ6 θ7 θ8
1
2 3 4
5
6 7 8
図 5.11: 位相シフト導入時のスイッチングシーケンスと理論波形
する位相角である。図 5.10 に示すように正側・負側間の位相シフト角 ϕ が零の場合注 4 ,
iPM と iNM は直流成分を有していない。つまり,正側・負側間にパワーフローは存在し
ない。一方で,図 5.11 に示すように負側のスイッチングシーケンスが遅れる方向を正に
位相シフト角 ϕ を導入した場合,iPM と iNM に直流成分が発生している。この場合,正
注4
正側・負側のスイッチ群が位相差 π [rad] で運転している場合を ϕ = 0 としている。
5.3 位相シフト制御
81
1
vtri
∆vref
vref
vref ′
0
0
4π
δ
ϕ
δ′
図 5.12: 位相シフト制御の導入法
K
1 + sT
vP2−M
ϕ∗
vM−N2
図 5.13: 位相シフト制御ブロック線図 (T = 32 ms, K = 0.05 rad/V)
側から負側へのパワーフローが生じている。節点 M に流入する電流 iPM と iNM の直流
成分は次式で与えられる。
(Appendix 参照)
INM = IPM
Vdc − 2VQ
=
ωℓ
(
β
1−
2π
)
ϕ
(5.4)
ここで,ω = 2πfCB , fCB は直流電圧均一回路のキャリア周波数 (スイッチング周波数) で
ある。したがって,正側から負側へ流入する電力 PPN は次式で表せられる。
(
)
2Vdc 2 − 4VQ Vdc
β
PPN =
1−
ϕ.
ωℓ
2π
(5.5)
つまり,正側・負側間のパワーフローは漏れインダクタンス ℓ に反比例し,位相シフト
角 ϕ に比例する。正側・負側間のパワーフローによって,結合インダクタの定格電力が
大きくなるが,中性点電位の制御に必要な電力は十分小さいため無視できる。また,位
相シフト角も十分に小さい。
第5章
82
結合インダクタを用いた直流電圧均一回路
位相シフト制御の導入法
5.3.3
位相シフト制御を導入するにあたっては,デューティ比制御に干渉しない必要があ
る。つまり,各 IGBT のデューティ比と正側・負側間の位相差を相互に干渉なく,同時
に制御する必要がある。本論文では各 IGBT の電圧指令値に矩形波を重畳する手法を提
案する。
図 5.12 に位相シフト制御の導入法を示す。ここで,vtri は振幅 1 のキャリア波 (三角
波),vref は分圧コンデンサ電圧で規格化した 1 つの IGBT の指令値電圧,δ は IGBT の
導通角である。電圧指令値 vref に矩形波を重畳した波形を vref ′ とする。この矩形波は,
vtri の傾きが正の場合に正に振れ,負の傾きの場合には負に振れる波形としている。矩
形波重畳によって,vtri が vref ′ と交差する点が,vref と交差する点に対して常に遅れ,位
相シフトが生じる。ただし,δ の幅は変化しないため,各 IGBT のデューティ比には干
渉しない。ここで,重畳する矩形波の振幅を ∆vref とすると,位相シフト角 ϕ は次式で
与えられる。
ϕ = π · ∆vref .
(5.6)
つまり,遅れ位相角 ϕ は矩形波の振幅 ∆vref に比例する。また,∆vref を負で与えれば,
進みの位相シフトが生じる。
図 5.13 に位相シフト制御のブロック図を示す。ここで,ϕ∗ は負側のスイッチ群に与
える遅れ位相シフト角の指令値である。分圧コンデンサ電圧のリプル成分を除去するた
めにカットオフ周波数 5 Hz (T = 32 ms) のローパスフィルタを導入している。また,比
例ゲインは K = 0.05 rad/V としている。
5.4
5.4.1
実験結果
実験システム構成
図 5.14 に 200 V 5.5 kW 実験システムの回路構成を,表 5.1 に定格と回路定数を示す。
5 レベルインバータは誘導電動機 (IM) に直結し,カップリングした同期発電機 (SG) と
抵抗により負荷を模擬している。負荷トルクは,ファン・ブロワ (2 乗低減トルク) 負荷
を模擬している。誘導機の制御には V /f 一定制御 (200 V/60 Hz) を用い,変調率指令値
MI∗ から一意的に出力相電圧指令値の基本波成分と出力周波数指令値 f ∗ を決定する。ま
た,1.0 < MI∗ ≤ 1.15 において電圧利用率拡大のため 3 次調波重畳を行っている [61]。
5.4 実験結果
Diode
rectifier
83
DC-Voltage-balancing
circuit
Q1
Q2
200 V
50 Hz
Five-level diode-clamped
inverter
P2
S1
Cdc1
P1
S2
DB1
LC
iLP
DB2
Lac
iS
S3
Cdc2
M
S4
IM
S5
DB3
iLN
Cdc3
N1
S7
DB4
SG
iO
S6
Q3
Q4
PO 200 V
5.5 kW
Cdc4
N2
Star-connected
resistive load
S8
4
MI∗
Calculation
(DSP)
24
PWM
(FPGA)
A/D
4
図 5.14: 200 V 5.5 kW 実験システム
図 5.15 に実験で用いた結合インダクタを示す。コアには珪素鋼板を採用し,集中巻とし
ている。表 5.2 にこの結合インダクタの定数を示す。励磁インダクタンスは LM = 18 mH
とし,漏れインダクタンスは ℓP = ℓN = 0.7 mH (結合係数 k = 0.96) である。また,最
大磁束密度を 0.3 T としているため,最適設計するとさらに小型化可能である。
5.4.2
位相シフト制御の効果
図 5.16 に 0.4 ≤ MI ≤ 1.15 における正側と負側の電圧偏差 Vdif = |VP2−M − VM−N2 | を
示す。ここで,各変調率における出力電力を表 5.3 に示す。位相シフト制御を適用して
いない場合,電圧偏差は変調率が低下するにつれて拡大し,変調率 MI = 0.4 において
Vdif = 1.4 V (2 台の分圧コンデンサ電圧の 1%) に達した。一方で位相シフト制御を適用
した場合の電圧偏差 Vdif は 0.2 V (0.2%) 以下に抑えられた。
図 5.17 に意図的に電圧不均一を起こすために,節点 M–N2 に 500 Ω (定格電力の 0.7%)
の抵抗を接続した結果を示す。位相シフト制御を適用しない場合の電圧偏差 Vdif は最大
で 10.4 V (7.6%) に達した一方で,制御を適用した場合の電圧偏差は 3 V (2.2%) 以下に
第5章
84
結合インダクタを用いた直流電圧均一回路
表 5.1: 定格と回路定数
Power rating
P
5.5 kW
Nominal ac mains voltage (line-to-line)
VS
200 V
Rated ac current
IS
16 A
Inductance of ac link inductor
Lac
1.2 mH (5.2 %)
Average DC capacitor voltage
Vdc
68 V
Split dc capacitor
Cdc
10 mF
4Vdc
270 V
DC link voltage
Unit capacitance constant [116]
H
17 ms (270 V)
Carrier frequency (inverter)
fCI
1.8 kHz
Carrier frequency (balancing)
fCB
1.25 kHz
on a three-phase, 50-Hz, 200-V, 5.5-kW, 16-A base
抑制できた。
5.4.3
誘導機駆動時の実験結果
図 5.18 にインバータ変調率 MI = 1.15,インバータ出力周波数 fO = 57.5 Hz,インバー
タ出力電力 PO = 4.7 kW とした場合の実験結果を示す。図 5.19 にファン・ブロワ負荷を
想定した場合,インダクタ電流がほぼ最大となる MI = 0.8,fO = 40 Hz,PO = 1.6 kW [61]
における実験結果を示す。図 5.20 に MI = 0.5,fO = 25 Hz,PO = 0.39 kW における実
験結果を示す。各波形は,節点 M から見た u 相電圧 vuM ,線間電圧 vuv ,u 相出力電流
iO ,直流リンク電圧 vP2−P1 ∼ vN1−N2 ,インダクタ巻線電流 iLP ,iLN である。表 5.4 に
各実験結果における 4 台の分圧コンデンサ電圧の平均値を示す。4 台の分圧コンデンサ
電圧は均一に制御され,各電圧の偏差は 1%以下であった。インダクタ電流のリプル電
流幅が出力電流の 3 倍の周波数で脈動していたが,これは,各分圧コンデンサ電圧が出
力電流の 3 倍の周波数で変動することに起因する [48]。分圧コンデンサ電圧の変動は,
漏れインダクタンスの印加電圧にも変動を引き起こし,リプル電流幅が変動する。
5.4 実験結果
85
図 5.15: 実験で用いた結合インダクタ
表 5.2: 結合インダクタの定数
Mutual inductance
LM
18 mH
Leakage inductance
ℓP = ℓN
0.7 mH
Maximum flux density
5.4.4
ΦM
0.3 T
Rated voltage
VL
70 V
Rated current
IL
7A
Rated current density of winding wire
Jw
3.5 A/mm2
Window utilization factor
Ku
0.27
漏れインダクタンス変化時のリプル電流幅
図 5.21 に図 5.20 に示した変調率 MI = 0.5 とした場合の結果の,正側巻線電流 iLP の
拡大波形を示す。ここで,結合インダクタの漏れインダクタンスは ℓP = ℓN = 0.7 mH で
ある。リプル電流幅は 2.1 A であった。
一方で,図 5.22 に結合インダクタの正側・負側巻線にそれぞれ 0.7 mH のインダクタ
を意図的に接続し,等価的に漏れインダクタンスを 2 倍 (ℓP = ℓN = 1.4 mH) に増加さ
せた場合の結果を示す。インバータ側の運転条件は図 5.21 に示した結果と同一である。
ℓP = ℓN = 0.7 mH の場合の結果に比べ,リプル電流幅は 1.1 A に減少した。それゆえ,
(5.2) 式に示しているとおり,リプル電流幅は漏れインダクタンスに反比例することが確
第5章
86
結合インダクタを用いた直流電圧均一回路
2.0
1.5
with control
Vdif [V]
1.0
1.0
0.5
Vdif /2Vdc [%]
without control
0.5
0
0
0.4
0.6
0.8
1.0
1.2
Modulation index: MI
図 5.16: 正側と負側の電圧偏差 Vdif
without control
10
with control
Vdif [V]
10
5
5
0
Vdif /2Vdc [%]
15
0
0.4
0.6
0.8
1.0
1.2
Modulation index: MI
図 5.17: 節点 M-N2 間に 500 Ω の抵抗を接続した場合の電圧偏差
認できた。
5.5
インダクタ体積の比較
本節では,提案回路における結合インダクタの体積と,先行回路における非結合イン
ダクタの体積との比較について述べる。以下では,Area Product を用いた定量的な検討
を行う [124, 125]。
5.5 インダクタ体積の比較
87
表 5.3: インバータ出力電力
Output frequency
fO [Hz]
20
30
40
47.5
57.5
Modulation index
MI
0.4
0.6
0.8
0.95
1.15
PO [W]
210
670 1590
Output power
2670 4730
表 5.4: 図 5.18–5.20 における各分圧コンデンサ電圧直流平均値
5.5.1
VP2−P1
VP1−M
VM−N1
VN1−N2
MI = 0.5
67.9 V
67.9 V
67.8 V
68.2 V
MI = 0.8
65.5 V
65.6 V
65.4 V
65.7 V
MI = 1.15
61.3 V
61.4 V
61.3 V
61.5 V
Area Product による評価
Area Product とは,文献 [124] で提案されたトランスとインダクタの体積を定量的に
評価する手法である。図 5.23 に示すように,トランスあるいはインダクタのコアにおい
て,コア断面積を Acore ,窓の面積を Awindow とすると,Area Product Ap は次式で定義
される。
Ap = Acore Awindow [m4 ]
(5.7)
ここで,Acore と Awindow は直交しているため,Ap はコアの形状により一意的に定まり,
トランス (インダクタ) 体積を評価可能である。Ap とトランス (インダクタ) 体積 V には
以下の関係が成り立つ。
V = KV A3/4
[m3 ]
p
(5.8)
ここで,KV はコアの形状から決定される無次元の定数である。
インダクタの場合,最大蓄積エネルギーを W とすると,Area Product ApL は次式で
求められる [124]。
ApL =
2W
[m4 ]
Ku Bm Jw
(5.9)
ここで,Ku は巻線の窓の占積率,Bm はコアの最大磁束密度,Jw は巻線の電流密度で
ある。つまり,インダクタの Area Product は蓄積エネルギーに比例する。
トランスの場合,定格電力を P とすると,Area Product ApT は次式で求められる [124]。
ApT =
2P
[m4 ]
4Ku fS Bm Jw
(5.10)
第5章
88
結合インダクタを用いた直流電圧均一回路
150
vuM
[V]
0
−150
300
vuv
[V]
0
−300
30
iO
[A]
0
−30
150
vP2−M
vP1−M
[V]
0
vN1−M
vN2−M
−150
10
iLP
[A]
0
10
iLN
[A]
0
10 ms
図 5.18: MI = 1.15, f = 57.5 Hz, PO = 4.7 kW における実験波形
つまり,トランスの Area Product は定格電力に比例する。
本論文で検討している結合インダクタは動作の観点からはトランスであるため,ト
ランスの Area Product を用いて評価可能である。図 5.15 に示している実験で用いた結
合インダクタの場合,Area Product を用いて理論体積を算出すると,(5.8)(5.10) 式と
表 5.2 の定数から,
{
Vexp = KV ·
2P
4Ku fS Bm Jw
}3/4
= 610 cm3
(5.11)
5.5 インダクタ体積の比較
89
150
vuM
[V]
0
−150
300
vuv
[V]
0
−300
30
iO
[A]
0
−30
150
vP2−M
vP1−M
[V]
0
vN1−M
vN2−M
−150
10
iLP
[A]
0
10
iLN
[A]
0
10 ms
図 5.19: MI = 0.8, f = 40 Hz and PO = 1.6 kW における実験波形
ここで,文献 [124] Table 5-2 から KV = 25.6 (カットコア,片側巻線の場合) とした。一
方,結合インダクタ体積の実測値は 440 cm3 であり,理論体積と概ね一致している。
5.5.2
先行回路と提案回路の比較
まず,非結合インダクタを用いた先行回路において,以下のパラメータを用いて検討
する。
第5章
90
結合インダクタを用いた直流電圧均一回路
150
vuM
[V]
0
−150
300
vuv
[V]
0
−300
30
iO
[A]
0
−30
150
vP2−M
vP1−M
[V]
0
vN1−M
vN2−M
−150
10
iLP
[A]
0
10
iLN
[A]
0
10 ms
図 5.20: MI = 0.5, f = 25 Hz and PO = 0.39 kW における実験波形
• 定格インダクタ電流: IL [A]
• スイッチング周波数: fS [Hz]
• 分圧コンデンサ電圧: Vdc [V]
• リプル電流幅: ∆IL [A] (peak-to-peak)
• コアの最大磁束密度: Bm [T]
• 定格巻線電流密度: J w [A/m2 ]
• 巻線占積率: Ku
5.5 インダクタ体積の比較
91
6
4
iLP
[A]
2
0
1 ms
図 5.21: 漏れインダクタンス ℓP = ℓN = 0.7 mH とした場合
6
4
iLP
[A]
2
0
1 ms
図 5.22: 漏れインダクタンス ℓP = ℓN = 1.4 mH とした場合
この非結合インダクタのインダクタンス値 LNC は,
LNC =
Vdc
[H].
2∆IL fS
(5.12)
ここで,インダクタ電流のリプル率 r を次式で定義する。
r=
∆IL /2
.
IL
(5.13)
第5章
92
結合インダクタを用いた直流電圧均一回路
Acore
Awindow
図 5.23: Area Product の定義
ただし,連続通流を保つ場合,0 < r ≤ 1 である。最大蓄積エネルギーを WNC とすると,
(5.13)(5.12) 式から,
WNC
)2
(
1
∆IL
= LNC IL +
2
2
1
Vdc
= ·
· I 2 · (1 + r)2
2 4rIL fS L
Vdc IL (1 + r)2
=
·
[J].
2fS
4r
(5.14)
最大蓄積エネルギー WNC はリプル率 r = 1 において最少となる。これは,インダクタ
電流が連続通流を維持する最大のリプル電流幅である。(5.14) 式から,非結合インダク
タの Area Product ApNC は以下の式で表わされる。
2
Vdc IL (1 + r)2
·
·
Bm Jw Ku 2fS
4r
2
(1 + r)
Vdc IL
=
·
[m4 ].
4r
Bm Jw Ku fS
ApNC =
(5.15)
次に,結合インダクタを用いた提案回路において,先行回路と同一の条件で評価を行
う。ここで,結合インダクタの Area Product を ApC とすると,次式で表わされる。
ApC =
Vdc IL
1
·
[m4 ].
2 Bm Jw Ku fS
(5.16)
非結合インダクタの場合,Area Product はリプル電流幅の設計によって値が変化するの
に対し,結合インダクタの場合は定格電圧・電流のみで定まる。(5.15)(5.16) 式から,結
合インダクタと非結合インダクタの Area Product 比は次式で表わされる。
ApC
2r
=
.
ApNC
(1 + r)2
(5.17)
5.6 4 レベルダイオードクランプ PWM インバータへの応用
93
(5.8) 式と (5.17) 式から,結合インダクタ体積 VC と 2 台の非結合インダクタ体積 2VNC
の比は次式で与えられる。
VC
1
=
2VNC
2
{
2r
(1 + r)2
}3/4
(5.18)
(5.18) 式は,0 < r ≤ 1 において単調増加である。最大のリプル率 r = 1 とした場合で
も,結合インダクタ体積は非結合インダクタ 2 台の 30 %である。図 5.19 に示した実験
結果では,リプル電流幅が 2 A,定格電流が 7 A であるため,リプル率 r = 0.14 である。
この場合,結合インダクタ体積は非結合インダクタ 2 台の 16 %となる。
5.6
4 レベルダイオードクランプ PWM インバータへの
応用
結合インダクタを用いた直流電圧均一回路は,4 レベルダイオードクランプ PWM イ
ンバータ (以下,4 レベルインバータと略す。) にも応用できる。図 5.24 に 4 レベルイン
バータを用いたモータドライブシステムを示す。直流電圧均一回路は Cdc1 と Cdc2 間と,
Cdc2 と Cdc3 間にそれぞれ設置したチョッパ回路のインダクタを結合した構成となって
いる。4 レベルインバータからモータへ有効電力が流出する場合,内側の分圧コンデン
サ (Cdc2 ) が放電され,外側 2 台の分圧コンデンサ (Cdc1 と Cdc3 ) が充電される [50]。直
流電圧均一回路は正側の IGBT 群 (Q1 と Q2 ) と,負側の IGBT 群 (Q3 と Q4 ) が交互に
スイッチングを行うことで,Cdc1 と Cdc3 を放電し,Cdc2 を充電する。これは,図 5.2 に
示している 5 レベルインバータ用直流電圧均一回路の動作原理と同様である。ただし,5
レベルインバータ用直流電圧均一回路は内側 2 台の分圧コンデンサを充電するが,4 レ
ベルインバータ用では内側 1 台の分圧コンデンサを充電する点が異なる。
4 レベルインバータ用直流電圧均一回路に用いるパワーデバイス数は,5 レベルイン
バータ用と同一である。6.6 kV モータドライブを実現する場合,5 レベルインバータ
では 4.5 kV IGBT を使用できるが,4 レベルインバータでは 6 kV 級の IGBT あるいは
GCT が必要である。これは,4 レベルインバータの 1 台の分圧コンデンサ電圧が 3 kV
程度 (直流リンク電圧の 1/3) となるためである。したがって,4 レベルインバータ用直
流電圧均一回路のコストは 5 レベルインバータ用に比べ高いと予想できる。
第5章
94
結合インダクタを用いた直流電圧均一回路
DC-voltage-balancing circuit
Q1
DB1
Cdc1
Q2
DB2
Four-level diode-clamped
inverter
DB3
Cdc2
M
Q3
Q4
DB4
Cdc3
図 5.24: 4 レベルインバータを用いたモータドライブシステムと直流電圧均一回路
5.7
第 5 章まとめ
本章では,ダイオード整流器・5 レベルダイオードクランプ PWM インバータを採用
したモータドライブに必要不可欠である直流電圧均一回路の小型化・軽量化を目的とし
て,結合インダクタを用いた新しい直流電圧均一回路の提案を行った。Area Product を
用いたインダクタ体積の定量的な検討を行い,結合インダクタは 2 台の非結合インダク
タに比べ,1/6 程度の体積となることを明らかにした。実験により,結合インダクタを
用いた直流電圧均一回路の分圧不均一の抑制効果を確認し,その有効性を実証した。
95
第6章
低速・定格トルク運転への応用
本章では,電力回生の不要な定トルク負荷を対象として,ダイオード整流器・5 レベ
ルインバータを用いたモータドライブの低速・定格トルク運転に適した制御法を検討す
る。これは,低速・定格トルク運転において顕在化する以下の問題を解決する。
1. 結合インダクタの磁束脈動
2. 5 レベルインバータの IGBT モジュール損失不均一
以下では,5 レベルインバータを低速・定格トルクで運転した場合の問題点と,提
案する制御法の動作原理を説明する。実験によって提案する制御法の有効性を確認し,
「PSCAD/EMTDC」[135] を用いたシミュレーションによって,5 レベルインバータの各
IGBT モジュール損失を平準化可能であることを明らかにする。
6.1
6.1.1
低速・定格トルク運転における問題点
電力回生の不要な定トルク負荷の用途
本章では,電力回生の不要であり,かつ定トルク負荷向けの高圧モータドライブを対象
としている。これは,ゴムミキサ,キルン,押出機,攪拌機などが該当する [23,126–129]。
これらの定トルク負荷はファン・ブロワ等の 2 乗低減トルク負荷と異なり,低速域にお
いて定格トルクを必要とする。一方で,石油や地熱開発用の掘削リグも電力回生の不要
でありかつ定トルク負荷の 1 つである。現行の掘削リグは 400 ∼ 690 V 程度の低圧モー
タが広く用いられている [130, 131]。しかし,掘削リグは大深度化・大容量化が進められ
ているため [132],インバータとモータ間を接続するロングケーブルの軽量化の観点か
ら,今後はモータの高圧化が期待できる。また,ロングケーブルは数 100 m 以上の長さ
第 6 章 低速・定格トルク運転への応用
96
iP2
iP1
iO
vP2−N2
M
iM
iN1
iN2
図 6.1: 主回路構成と節点電流の定義
に達すると考えられるため,インバータのスイッチング波形に対して分布定数線路とし
て振る舞い,モータ端にサージ電圧を発生させる可能性がある。このサージ電圧によっ
てモータの絶縁劣化を引き起こす例が報告されている [133]。一般的な 2 レベルインバー
タでは,このサージ電圧は最大で直流リンク電圧の 2 倍に達する [134]。5 レベルイン
バータを採用した場合は 1 回のスイッチングの電圧ステップが直流リンク電圧の 1/4 で
済むため,サージ電圧の低減が期待できる。
低速・定格トルク運転では 5 レベルインバータの出力周波数と変調率が低い領域での
動作になり,かつモータ電流 (インバータ出力電流) は定格電流を必要とする。
6.1.2
結合インダクタの磁束脈動
図 6.1 において,節点 P2, P1, M からインバータへ流出する電流をそれぞれ iP2 , iP1 , iM ,
節点 N1, N2 にインバータから流入する電流を iN1 , iN2 とする。三相のダイオードクラ
ンプインバータの場合,これらの節点電流はインバータ出力周波数 fO の 3 倍の周波数の
交流成分を含む [48]。節点電流のうち iP1 , iM , iN1 に含まれる交流成分は 4 台の分圧コ
ンデンサ電圧に脈動を引き起こす。iP2 と iN2 に関してはダイオード整流器を経由するた
め,分圧コンデンサ電圧の脈動には影響しない。これは,ダイオード整流器の出力電圧
6.1 低速・定格トルク運転における問題点
97
vP2−N2 は定電圧源と見なせ,分圧コンデンサよりもインピーダンスが低いためである。
分圧コンデンサ電圧は結合インダクタの各巻線にも印加されるため,結合インダクタ内
の磁束にも脈動を引き起こす。
図 6.2 は各節点電流 iP1 , iM , iN1 ,各分圧コンデンサ電圧,結合インダクタ内磁束 Φ
の関係をブロック線図で示している。ここで,Cdc は 1 台の分圧コンデンサ容量である。
磁束 Φ は各節点電流に対して 1/s2 の周波数特性を有している。これは,各節点から流
入・流出する電流の振幅が一定とすると,磁束脈動が各節点電流の交流成分 3fO の 2 乗
に反比例することを示している。
一方で,図 6.3 に 5 レベルインバータの相電圧指令値 e∗ と, 節点 P2∼N2 の通電率
DP2 ∼ DN2 の関係を示す。ここで,通電率とはキャリア周波数がインバータ周波数と比
較して十分高いと仮定した場合の,出力電流 iO がそれぞれの節点に流入・流出する比を
表している [58–61]。したがって,各節点に流入・流出する電流は通電率と出力電流 iO
の積で表される。ここで,DP2 ∼ DN2 はそれぞれ次式で与えられる。
{
0
(−2Vdc ≤ e∗ < Vdc )
DP2 =
∗
e /Vdc − 1 (Vdc ≤ e∗ ≤ 2Vdc )
(−2Vdc ≤ e∗ < 0)
0
e∗ /Vdc
(0 ≤ e∗ < Vdc )
DP1 =
∗
−e /Vdc + 2 (Vdc ≤ e∗ ≤ 2Vdc )
0
(−2Vdc ≤ e∗ < −Vdc )
∗
e /Vdc + 1
(−Vdc ≤ e∗ < 0)
DM =
∗
−e /Vdc + 1 (0 ≤ e∗ < Vdc )
0
(Vdc ≤ e∗ ≤ 2Vdc )
∗
e /Vdc + 2 (−2Vdc ≤ e∗ < −Vdc )
−e∗ /Vdc
(−Vdc ≤ e∗ < 0)
DN1 =
0
(0 ≤ e∗ ≤ 2Vdc )
{
−e∗ /Vdc − 1 (−2Vdc ≤ e∗ < −Vdc )
DN2 =
0
(−Vdc ≤ e∗ ≤ 2Vdc )
(6.1)
(6.2)
(6.3)
(6.4)
(6.5)
相電圧指令値 e∗ が常に −Vdc ≤ e∗ ≤ Vdc を満たす場合,つまりインバータ変調率 MI < 0.5
では DP2 と DN2 が常に零であり,出力電流 iO は節点 P1,M,N1 のみに流入・流出す
る。これは,インバータ変調率 MI < 0.5 においては節点電流 iP1 , iM , iN1 の交流成分が
増加することを意味している。
以上から,低速・定格トルク運転では出力周波数だけでなく,変調率も低いことに起
因して結合インダクタ内の磁束の脈動が顕著となり,磁束飽和を招くおそれがある。特
に,定トルク負荷では 2 乗低減トルク負荷と比較して低速域の出力電流が大きいため,
第 6 章 低速・定格トルク運転への応用
98
1
sCdc
node currents
(iP1 , iM , iN1 )
capacitor
voltages
1
s
magnetic flux
(Φ)
図 6.2: 節点電流と磁束の関係
DN2
DN1
1
DM
DP1
DP2
D
−2Vdc
−Vdc
0
Vdc
2Vdc
→ e∗
図 6.3: 相電圧指令値 e∗ と各節点のデューティ比 DP2 ∼ DN2
この問題は顕著になる。
6.1.3
IGBT モジュール損失不均一
5 レベルインバータを低変調率で運転する場合,5 レベルインバータを構成する IGBT
モジュール (IGBT とその還流ダイオード (FWD) の一組) の損失に不均一が生じる [61]。
特に,変調率 MI < 0.5 の場合は出力相電圧は 3 レベルに低下し,スイッチングしない
IGBT が発生する [57]。その一方でスイッチングを行う IGBT のスイッチング周波数は
増加し,特定の IGBT モジュール損失が増大する。5 レベルインバータの放熱設計の観
点から,各パワーデバイスの損失は均一であることが望ましい。
6.2
零相電圧重畳による特性改善
本節では,低速・定格トルク運転時の特性改善を目的として,5 レベルインバータに
零相電圧を重畳する。零相電圧を重畳した場合,相電圧指令値の取り得る範囲が拡大す
る。これによって,変調率 MI < 0.5注 1 の場合であってもすべての素子のスイッチングが
注1
本論文では,零相電圧を含まない,基本波のみの振幅について変調率を定義している。
6.2 零相電圧重畳による特性改善
99
実現し [61],特定の IGBT モジュールの損失増大を抑制可能である。ただし,すべての
IGBT モジュール損失を完全に均一にすることは困難であるが,放熱設計の観点からは
1 モジュールあたりの最大値が低減できればよい。さらに,零相電圧重畳は結合インダ
クタの磁束脈動低減にも寄与する。
6.2.1
結合インダクタの磁束脈動低減
結合インダクタの磁束脈動を抑制するためには,節点電流 iP1 , iM , iN1 に含まれる交
流成分を低減する必要がある。零相電圧重畳は相電圧指令値の取り得る範囲を拡大させ
るため,変調率 MI < 0.5 の領域においても出力電流 iO が節点 P2,N2 に流入・流出す
る。その一方で,節点 P1,M,N1 に流入・流出する時間は減少する。したがって,零
相電圧重畳は節点電流 iP1 , iM , iN1 の交流成分を減少させ,結合インダクタの磁束脈動
を低減する。
6.2.2
零相電圧の次数
零相電圧を重畳する際にはその次数に留意する必要がある。まず,三相すべての相電
圧指令値に同一の効果を与えるため,3n 次零相電圧 (n = 1, 2, 3 · · · ) である必要があ
る。次に,偶数次零相電圧は中性点電位に変動を与えるため [48],奇数次零相電圧であ
る必要がある。
さらに,基本波と比較して零相電圧の振幅が大きい場合,零相電圧に起因して節点電
流 iP1 , iM , iN1 に交流成分が生じる問題がある。図 6.4 に (6.2) 式から求めた MI = 0.25
における節点 P1 の各相の通電率の時間関数を示す。ここで,DP1u ,DP1v ,DP1w はそれ
ぞれ u 相,v 相,w 相の通電率を示している。また,TO は相電圧指令値 1 周期 (出力電流
1 周期) である。図 6.4(a) は基本波のみの場合の結果であり,各相の通電率 DP1u ,DP1v ,
DP1w は互いに 120◦ 差異を持つ波形である。それゆえ,各相から節点 P1 に流入・流出す
る電流は平滑され,出力周波数の 3 倍とその整数倍の周波数成分のみを含む。一方で,
図 6.4(b) は 3 次零相電圧を重畳し,相電圧指令値を次式で与えた場合の結果である。
e∗ = 2Vdc (0.25 sin ωO t − 0.65 sin 3ωO t)
(6.6)
この場合,DP1u ,DP1v ,DP1w ともに 120◦ 毎に断続的な波形であり,すべて零になる期
第 6 章 低速・定格トルク運転への応用
100
Duty factor DP1
1.0
0.8
DP1u (t)
0.6
DP1v (t)
DP1w (t)
0.4
0.2
0
0
1
T
2 O
TO
→t
(a) 零相電圧重畳なし
DP1u (t)
DP1v (t)
3
T
2 O
DP1w (t)
Duty factor DP1
1.0
0.8
0.6
0.4
0.2
0
0
1
T
2 O
TO
(b) 3 次零相電圧重畳
→t
3
T
2 O
図 6.4: 節点 P1 の相毎の通電率
間が存在する。これは,節点 P1 に出力周波数の 3 倍の周波数成分を流入・流出させる。
また,相電圧指令値に 9 次零相電圧を重畳した場合,通電率 DP1u ,DP1v ,DP1w は 40◦
毎に断続的な波形となり,節点 P1 に出力周波数の 9 倍の周波数成分を流入・流出させ
る。これは,節点 M と N1 についても同様である。つまり,重畳した零相電圧と同一の
次数の周波数脈動を引き起こす。ただし,節点 P1,M,N1 に出力電流が流入・流出す
る時間は減少しているため,ほかの次数の交流成分は減少している。3 次零相電圧を重
畳した場合は節点電流に内在的に含まれる 3fO の交流成分と一致する脈動を誘発するた
め,磁束脈動を拡大させる可能性がある。しかし,磁束脈動は節点電流に含まれる周波
数の 2 乗に反比例するため,高い次数の零相電圧を適用すれば,零相電圧に起因する脈
動を十分に低減できる。以上の考察から,6n + 3 次零相電圧 (n = 1, 2, 3, · · · ) が適し
6.2 零相電圧重畳による特性改善
101
2Vdc
Vdc
e∗
0
−Vdc
−2Vdc
(a) 零相電圧重畳なし
2Vdc
Vdc
e∗
0
−Vdc
−2Vdc
(b) 9 次零相電圧重畳
図 6.5: キャリア波と MI = 0.25 における相電圧指令値 e∗
ている。ただし,現行の 4.5 kV IGBT のスイッチング周波数は数 100 Hz 程度に限定さ
れているため,5 レベルインバータのキャリア周波数は 1000∼2000 Hz 程度が限界であ
る。そのため,高次の零相電圧,つまり高周波数の零相電圧はインバータの制御性の観
点から望ましくない。そこで,本論文では 9 次零相電圧の重畳を検討する。ただし,9
次零相電圧を重畳する場合は同期 PWM の適用が望ましい。これは,9 次零相電圧を重
畳することで相電圧指令値の周波数成分とキャリア周波数の比が減少するためである。
6.2.3
9 次零相電圧の振幅と節点電流
図 6.5 に 5 レベルインバータのキャリア波と相電圧指令値 e∗ の模式図を示す。(a),
(b) ともに基本波の振幅は同一 (変調率 MI = 0.25) であるが,(b) は 9 次零相電圧重畳に
よって相電圧指令値の振幅が拡大している。9 次零相電圧重畳する際の相電圧指令値 e∗
を次式で与える。
e∗ = 2Vdc (MI sin ωO t + A9 sin 9ωO t)
(6.7)
第 6 章 低速・定格トルク運転への応用
102
allowable maximum
amplitude A9max
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1.0
Modulation index MI
図 6.6: 重畳可能な 9 次零相電圧振幅の最大値 A9max
ここで,ωO = 2πfO である。振幅を拡大させる観点から,9 次成分は基本波成分とピー
クが重なるよう初期位相を一致させている。また,相電圧指令値の飽和を防ぐため,次
式を満たす必要がある。
MI + A9 < 1
(6.8)
さらに,直流電圧均一回路が節点 P1 と N1 に対して一方向にしか電流を流せないため,
節点電流の直流成分 IP1 と IN1 は常に正である必要がある。ここで,IP1 は通電率 DP1
と出力電流 iO から次式で表せる [58–61]。
IP1
3
=
TO
∫
TO
DP1 · iO dt
(6.9)
0
一方で,IN1 も同様に求められる。9 次零相電圧を重畳した場合,通電率 DP1 の低下に
ともない IP1 が減少するが,IP1 < 0 とならないように 9 次零相電圧の振幅を決定する必
要がある。
図 6.6 に (6.8)(6.9) 式から求めた重畳可能な 9 次零相電圧振幅の最大値 A9max を示
す。これは,0 ≤ MI ≤ 0.27 においては (6.9) 式より求まる IP1 = 0 となる振幅であり,
0.27 < MI ≤ 1 においては (6.8) 式によって定まる相電圧が飽和しない最大の振幅であ
る。A9max は変調率 MI から一意的に定まる。この最大値 A9max を超えないように 9 次
零相電圧振幅 A9 を決定する必要がある。後述の実験及びシミュレーションでは余裕を
考慮して,9 次零相電圧の振幅 A9 を次式で与える。
{
A9max − 0.1 (MI < 0.9)
A9 =
0
(MI ≥ 0.9)
(6.10)
6.3 直流電圧均一回路の制御
103
1.2
without ninth injection
with ninth injection
1.0
0.8
IP1
Id 0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1.0
Modulation index, MI
図 6.7: 9 次零相電圧重畳時の節点電流 IP1 理論解析
図 6.7 に (6.9)(6.10) 式から算出した IP1 の理論解析結果を示す。ここで,Id は出力電
流の有効電流成分である。IP1 は Id で規格化した結果を示している。実線は 9 次零相電
圧を重畳せず基本波のみの場合の結果である。IP1 は変調率 MI = 0.55 において最大値を
取り,Id の 1.1 倍程度に達している [110]。一方で,破線は 9 次零相電圧を重畳した場合
の結果を示している。IP1 は 9 次零相電圧を重畳しない場合に比べ低減され,MI = 0.71
において最大値 IP1 /Id = 0.87 を取る。
6.3
直流電圧均一回路の制御
9 次零相電圧重畳は結合インダクタの磁束脈動低減に寄与するが,完全に脈動を除去
することは不可能である。磁束脈動を考慮して結合インダクタを設計すると,コアの断
面積を大きくする必要があり,体積の大型化を招く。
本節では直流電圧均一回路のスイッチングシーケンスの自由度を利用した,磁束の
振幅を低減する手法を提案する。これは,磁束脈動が残留した状態であっても,磁束の
ピーク値を設計値以下に維持できるため,脈動を考慮することなく結合インダクタを設
計可能にする。
第 6 章 低速・定格トルク運転への応用
104
Q1
ON
Q2
ON
Q3
ON
Q4
ON
TS
period
T1
1
T2 T3 T4
2 3 4
T5
5
T6 T7 T8
6 7 8
図 6.8: 直流電圧均一回路のスイッチングシーケンスと各 period の時間幅の定義
6.3.1
磁束の振幅低減
図 6.8 に直流電圧均一回路のスイッチングシーケンスと各 period の時間幅の定義を示
す。スイッチングシーケンスにおいて特記すべき点は,period 3 と period 7 における直流
電圧均一回路の動作モードである。図 6.9 に period 3 および period 7 における動作モー
ドを示す。Q2 と Q3 のみがオンしているため,結合インダクタの巻線は正側・負側とも
にクランプダイオード DB1 または DB4 を介して短絡し,巻線電流 iLP と iLN は還流する。
この期間,直流電圧均一回路は分圧コンデンサの充放電に寄与しない。period 2, 4, 6, 8
はデューティ比制御を実現する上で重要な期間であるが,これらの占める時間は十分小
さく,結合インダクタ内の磁束に与える影響は無視できる。それゆえ,以下の議論では
Tk ≃ 0 (k = 2, 4, 6, 8) とする。
図 6.10 に漏れインダクタンスを無視した場合の巻線電圧 vwind
注2
と結合インダクタ内
の磁束 Φ の模式図を示す。(a) では直流電圧均一回路が period 3 と 7 を経ることなく,
period 1 と 5 のみで動作していると仮定している。これは,図 5.2 に示した直流電圧均
一回路の基本的な動作モード mode A と mode B のみでスイッチングしている状態であ
る。この場合,巻線電圧 vwind は方形波となり,磁束 Φ は三角波となる。これに対して,
(b) に示すように period 3 と 7 を導入すると,vwind は 3 レベルの波形となる。磁束 Φ は
台形波となり,そのピーク値は (a) に示した三角波に比べ小さい。したがって,period 3
注2
つまり,励磁インダクタンスの印加電圧である。
6.3 直流電圧均一回路の制御
105
P2
Q1
DB1
Q2
vwind iLP
P1
Cdc1
DB2
Cdc2
M
DB3
Cdc3
N1
Q3
vwind i
LN
Q4
DB4
Cdc4
N2
図 6.9: Period 3 と 7 の動作モード
vwind
vwind
t
t
Φ
Φ
t
t
(a) Period 3・7 なし
(b) Period 3・7 導入
図 6.10: 巻線電圧 vwind と磁束の関係
と 7 を増加させることで磁束の振幅を低減できる。ここで,磁束のピーク値 Φpeak は次
式で求められる。
Φpeak =
Vdc T1
·
N 2
(6.11)
ここで,N は巻線のターン数である。また,T1 は次式で与えられる。
T1 ≃
TS
− T3
2
(6.12)
第 6 章 低速・定格トルク運転への応用
106
ここで,T2 ≃ 0, T4 ≃ 0 としている。(6.11) 式は (6.12) 式を用いて次式に変形できる。
(
)
Vdc TS
2T3
Φpeak ≃
·
1−
(6.13)
N
4
TS
ここで,(5.3) 式に示している Q1 と Q2 または Q3 と Q4 のデューティ比の差 ∆D は次式
に近似できる。
∆D ≃
2T3
TS
(6.14)
ここで,スイッチングシーケンスの対称性から T3 = T7 としている。(6.14) 式を (6.13)
式に代入すると,
Φpeak ≃
Vdc TS
·
(1 − ∆D) .
N
4
(6.15)
つまり,デューティ比制御において ∆D を増加させることで磁束のピーク値 Φpeak を低
減できる。
9 次零相電圧重畳時の磁束ピーク値が既知であれば,それを設計値以内に収めるよう
に (6.15) 式から ∆D を決定すればよい。磁束脈動を考慮した磁束ピーク値の理論解析は
困難であるが,ある 1 つの動作条件下 (例えば出力周波数 fO = 10 Hz の場合) における
磁束脈動幅が既知であれば,磁束脈動が出力周波数の 2 乗に反比例する関係を用いて磁
束ピーク値を予測できる。
6.3.2
∆D 増加時の巻線電流
4.1.2 小節では非結合インダクタを用いた直流電圧均一回路に関して,∆D が増加する
と,インダクタ電流の直流成分も増加することを明らかにしている。これは,結合イン
ダクタを用いた直流電圧均一回路においても成立する。提案法は磁束の振幅を低減でき
る一方で,巻線電流の直流成分 ILP と ILN の増大を招く。しかし,9 次零相電圧重畳は
IP1 と IN1 を低減する。それゆえ,ILP と ILN は ∆D の拡大に起因して増加しても,定格
電流以内に抑えることが可能である。特に,変調率 MI < 0.27 の領域では 9 次零相電圧
重畳によって IP1 と IN1 を零まで低減できるため,∆D を 1 付近まで増加させることも
可能である。
6.4 実験結果
107
Inverter
PO
IM
SG
MC
Resistive Load
図 6.11: 同期発電機 (SG) と負荷抵抗の接続
6.4
6.4.1
実験結果
実験条件
実験システム構成は第 5 章に示している図 5.14 と同一である。ただし,定トルク負荷
を模擬するため,次式に示すとおり出力電力 PO が出力周波数 fO に比例するように同期
発電機 (SG) に接続した負荷抵抗を調整した。
PO =
fO
× 5.5 [kW]
60
(6.16)
また,定トルク負荷ではファン・ブロワなどと異なり,負荷トルクが急変する動作が予
想される。そのため,図 6.11 に示すように同期発電機 (SG) の出力と負荷抵抗間に電磁
接触器 (MC) を接続し,同期発電機が発生する負荷トルクを零 (MC 開放) から定格 (MC
導通) へ過渡的に変化できるようにした。また,MC 導通時に定格トルク時の出力電力
となるようあらかじめ負荷抵抗を調整した。
結合インダクタの磁束脈動の観測のため,励磁電流 imag を測定する。巻線電流 iLP と
iLN の差を検出することで imag を測定する。ここで,(6.13) 式と同様に励磁電流のピー
ク値 imagpeak は次式で与えられる。
imagpeak ≃
Vdc TS
·
(1 − ∆D)
LM 4
(6.17)
実験で用いる結合インダクタの励磁インダクタンスは LM = 8.9 mH である。また,直
流電圧均一回路のスイッチング周波数は 1.25 kHz であるため,TS = 800 µs である。
∆D = 0.1 を初期値とすると,励磁電流ピーク値は (6.17) 式から bimagpeak = 1.38 A であ
る。本論文では,bimagpeak を「設計値」と定義する。
第 6 章 低速・定格トルク運転への応用
108
6.4.2
定常状態における実験結果
図 6.12 に零相電圧重畳がない場合の出力周波数 fO = 10 Hz,∆D = 0.1 における定常
状態の実験結果を示す。ここで,インバータ変調率 MI = 0.25,出力電力 PO = 920 W
とした。以下の図 6.13 と図 6.14 の実験結果においても,∆D と 9 次零相電圧重畳の有
無を除き同じ条件とした。各波形は,節点 M から見た u 相電圧 vuM ,線間電圧 vuv ,u
相出力電流 iO ,分圧コンデンサ電圧 vP2−M ∼ vN2−M ,結合インダクタの巻線電流 iLP ,
iLN と励磁電流 imag である。励磁電流 imag は出力周波数 fO の 3 倍 (30 Hz) で脈動して
おり,その絶対値は最大 2.55 A( bimagpeak の 185%) であった。また,巻線電流の直流成分
は ILP , ILN とも 10.2 A であった。
一方で,図 6.13 に 9 次零相電圧を重畳し,∆D = 0.1(初期値) とした場合の実験結果
を示す。ここで,9 次零相電圧振幅 A9 = 0.63 とした。励磁電流 imag の脈動は低減され,
その絶対値は最大 1.84 A(133%) であった。また,相電圧 vu は 9 次零相電圧重畳によっ
て振幅が拡大し 5 レベルの波形であった。零相電圧重畳に起因して,巻線電流の直流成
分が ILP = ILN = 2.5 A に減少した。巻線電流 iLP と iLN が出力周波数の 9 倍 (90 Hz) で
脈動していたが,これは 9 次零相電圧重畳によって分圧コンデンサ電圧が 90 Hz の脈動
を有していることに起因する。図 5.7 に示すデューティ比制御の PI ゲインを介し,分圧
コンデンサの脈動が iLP と iLN の指令値に脈動を誘発しているためである。
図 6.14 に 9 次零相電圧を重畳し,period 3 と 7 の拡大のため ∆D = 0.5 に増加させ
た場合の実験結果を示す。9 次零相電圧振幅は図 6.13 に示した結果と同様,A9 = 0.63
とした。励磁電流 imag の脈動は残留しているが振幅は低減しており,その絶対値は最
大 1.25 A(91%) であった。また,巻線電流の直流成分は ∆D の拡大にともない増加し,
ILP = ILN = 4.5 A であったが,図 6.12 に示している 9 次零相電圧を重畳しない場合と
比較すると小さい。
6.4.3
負荷トルク急変時の実験結果
図 6.15 ∼ 6.17 に fO = 10 Hz における負荷トルクを零から定格に急変させた場合の
実験結果を示す。トルク変化にともない出力電力 PO は 200 W から 920 W に変化した。
図 6.15 ∼ 6.17 のトルク急変後の定常状態における実験条件はそれぞれ図 6.12 ∼ 6.14 の
条件と同じである。いずれの波形もトルク急変時に出力電流 iO と巻線電流 iLP , iLN に
6.5 9 次零相電圧重畳時のパワーデバイス損失
109
オーバシュートが見られるが,いずれも 100 ms 程度の短時間であり損失の観点から実
用上は問題ない。また,図 6.17 において imag の絶対値は過渡的に 1.75 A (126%) に達し
たが,∆D をさらに大きく設計することでトルク急変時にも設計値以内に抑えることが
可能である。
6.5
9 次零相電圧重畳時のパワーデバイス損失
本節では,9 次零相電圧を重畳した場合のパワーデバイス損失解析を行う。損失解析
に限っては「PSCAD/EMTDC」[135] によるシミュレーションによって,5 レベルイン
バータを用いた 6.6 kV 高圧モータドライブを模擬する。これは,200 V 5.5 kW 実験シ
ステムはミニモデルであり,使用しているパワーデバイスは耐圧・定格電流ともに大幅
に余裕を持っているため,実験システムによる損失の評価は適切でないためである。
6.5.1
5 レベルインバータの損失解析法
図 6.18 にシミュレーション回路を,表 6.1 に回路定数を示す。5 レベルインバータの
損失解析のみに着目しているため,直流リンクの分圧コンデンサはすべて 2.25 kV の電
圧源で置き換えている。モータは電流源で置き換え,誘導機の定トルク運転を想定し力
率 cos ϕ = 0.8,有効電流 Id = 200 A 一定としている。使用する IGBT モジュールは三
菱電機 CM400HB-90H(定格 4.5 kV,400 A) である [136]。また,クランプダイオード
は IGBT モジュール内の還流ダイオードを使用する。キャリア周波数は 1500 Hz として
いるが,5 レベルインバータでは各 IGBT のスイッチング周波数は最大でキャリア周波
数の 1/2 (750 Hz),平均では同 1/4 (375 Hz) である。また,低速域の運転はトルクブー
ストを必要とするため,出力周波数と変調率の関係は一意的に決定できない。しかし,
キャリア周波数が出力周波数に比べ十分大きい場合,各デバイス損失は出力周波数に依
存しないため,出力周波数 fO = 10 Hz 一定として解析を行う。重畳する 9 次零相電圧
の振幅 A9 は (6.10) 式で与える。
5 レベルインバータは上下アーム対称であるため,片側アームのみのパワーデバイス
の損失を算出すればよい。図 6.19 に示すように,上アームの IGBT,Q1 ∼ Q4 と逆並列
の FWD,D1 ∼ D4 ,およびクランプダイオード,DC1 ∼ DC3 の損失解析を行う。
IGBT は導通損失とスイッチング損失 (ターンオン損失・ターンオフ損失),ダイオー
第 6 章 低速・定格トルク運転への応用
110
ドは導通損失とリカバリ損失に分けて算出する。IGBT の導通損失は,コレクタ–エミッ
タ間電圧 VCE とコレクタ電流 IC の積の,出力電流 1 周期 TO における平均値として求め
る。ダイオードも同様に,順方向電圧 VF と順方向電流 IF の積の平均値として算出する。
IGBT の VCE と IC の関係はデータシートからの直線近似によって次式で与える [136]。
VCE = 1.6 + 4.6 × 10−3 · IC [V]
(6.18)
同様に,ダイオードの VF と IF の関係も直線近似により次式で与える [136]。
VF = 1.1 + 6.6 × 10−3 · IF [V]
(6.19)
IGBT のスイッチング損失は,ターンオン時・ターンオフ時のコレクタ電流 IC を検出
し,スイッチング 1 回あたりの損失を逐一算出する。これを積分し出力電流 1 周期の平
均値を求める。ダイオードのリカバリ損失についても同様の手法で算出する。IGBT の
ターンオン損失 Eon ,ターンオフ損失 Eoff とコレクタ電流 IC の関係はデータシートか
らの直線近似により次式で与える [136]。
Eon = Eoff = 4.4 × 10−3 · IC [J/pulse]
(6.20)
同様に,ダイオードのリカバリ損失 Err についても直線近似により順方向電流 IF との関
係を次式で与える。
Err = 0.75 × 10−3 · IF [J/pulse]
(6.21)
ただし,(6.21) 式はターンオフ時の逆電圧が 2.25 kV の場合の結果である。クランプダ
イオードに関しては,ターンオフ時の逆電圧が素子によって異なる。そのため,リカバ
リ損失が逆電圧 VR [kV] に比例すると仮定し次式を用いる。
Err ′ =
6.5.2
VR
· 0.75 × 10−3 · IF [J/pulse]
2.25
(6.22)
直流電圧均一回路の損失解析法
直流電圧均一回路の損失は巻線電流のリプル率に依存するが,(5.2) 式に示すようにリ
プル率は結合インダクタの漏れインダクタンスと,IGBT とダイオードの電圧降下に依
存するため一般的な議論は困難である。本論文で検討している 200 V 5.5 kW ミニモデ
ルでは 600 V IGBT・ダイオードを採用しているため,1 台の分圧コンデンサ電圧 (68 V)
に対し素子の電圧降下は相対的に大きいが,4.5 kV IGBT・ダイオードを用いた実際の
6.5 9 次零相電圧重畳時のパワーデバイス損失
111
表 6.1: 損失解析で用いる回路定数
Power rating
P
2.3 MW
Nominal ac mains voltage (line-to-line)
VS
6.6 kV
Rated ac current
IS
200 A
Vdc
2.25 kV
4Vdc
9 kV
Carrier frequency (inverter)
fCI
1500 Hz
Carrier frequency (balancing)
fCB
375 Hz
DC capacitor voltage
DC link voltage
6.6 kV システムでは素子の電圧降下が 1 台の分圧コンデンサ電圧 (2.25 kV) に対して十
分小さいと予想される。それゆえ,実際の 6.6 kV システムにおける巻線電流のリプル
率は 200 V 実験システムに比べ大幅に低減できると予想される。この場合,リプル率は
零としても損失解析にほぼ影響しない。
図 6.20 に直流電圧均一回路の損失解析モデルを示す。5 レベルインバータと同様,直
流電圧均一回路も正側・負側で対称な回路構成であるため,正側の回路のみに着目する。
巻線電流はリプル率を零と仮定しているため,定電流源 ILP で置き換えている。ILP は
節点電流の直流成分 IP1 と,Q1 と Q2 のデューティ比の差 ∆D から算出される。そのた
め,図 6.7 の結果と (4.2) 式から ILP を決定する。分圧コンデンサは 2.25 kV の定電圧源
で置き換えている。IGBT のスイッチング周波数は,5 レベルインバータの IGBT の平
均のスイッチング周波数に合わせ fCB = 375 Hz とする。
巻線電流を定電流源 ILP に置き換えた場合,すべてのパワーデバイス (Q1 , Q2 およ
び DB1 , DB2 ) をターンオン時に通過する電流は常に ILP に等しい。この関係を用いるこ
とで,シミュレーションを用いずに損失解析が可能になる。IGBT のスイッチング損失
Pswloss はコレクタ電流が ILP 一定である条件から,(6.20) 式を用いて次式で与えられる。
Pswloss = (Eon + Eoff ) · fCB
= 2 × 4.4 × 10−3 · IC · fCB
= 8.8 × 10−3 · ILP · fCB
(6.23)
第 6 章 低速・定格トルク運転への応用
112
同様に,ダイオードのリカバリ損失も (6.22) 式を用いて次式で与えられる。
Prrloss = Err ′ · fCB
VR
=
· 0.75 × 10−3 · IF · fCB
2.25
VR
=
· 0.75 × 10−3 · ILP · fCB
2.25
(6.24)
ただし,直流電圧均一回路を構成するダイオードは素子によって逆電圧が異なるため,
逆電圧を考慮した (6.22) 式を用いている。
IGBT とダイオードの導通損失はその通電率に依存する。図 6.8 の関係から,Tk ≃
0 (k = 2, 4, 6, 8) と近似し,(6.14) 式を用いると,Q1 , Q2 , DB1 , DB2 それぞれの通電
率 DQ1 , DQ2 , DDB1 , DDB2 は以下の式で表される。
T1
1 T3
= −
TS
2 TS
1
≃ (1 − ∆D)
2
T1 + T3 + T7
1 T3
≃
= +
TS
2 TS
1
≃ (1 + ∆D)
2
T3 + T7
2T3
≃
=
TS
TS
≃ ∆D
T5
1 T3
≃
= −
TS
2 TS
1
≃ (1 − ∆D)
2
DQ1 ≃
DQ2
DDB1
DDB2
(6.25)
(6.26)
(6.27)
(6.28)
以上の通電率の関係を用いることで,IGBT の導通損失は (6.18) 式から次式で与えら
れる。
PQcond = DQn · VCE · IC
(
)
= DQn · 1.6 · IC + 4.6 × 10−3 · IC 2
(n = 1, 2)
(6.29)
同様にダイオードの導通損失は (6.19) 式から次式で表される。
PDcond = DDBn · VF · IF
(
)
= DDBn · 1.1 · IC + 6.6 × 10−3 · IF 2
(n = 1, 2)
(6.30)
6.5 9 次零相電圧重畳時のパワーデバイス損失
6.5.3
113
5 レベルインバータの IGBT モジュール損失解析結果
放熱設計の観点から,IGBT と FWD を含めたモジュール毎の損失が重要であるた
め,以下では S1 と D1 ,S2 と D2 ,S3 と D3 ,S4 と D4 それぞれの損失和で評価する。図
6.21(a) に零相電圧重畳のない場合の解析結果を示す。ここで S1 と S4 の平均スイッチン
グ周波数は 0 ∼ 500 Hz,S2 と S3 の平均スイッチング周波数は 250 ∼ 750 Hz である。特
に,変調率 MI < 0.5 の領域では S1 と S4 がスイッチングを行わない一方で,S2 と S3 の
平均スイッチング周波数は 750 Hz(キャリア周波数の 1/2) である。モジュール毎の損失
には大きな不均一が生じ,S2 と D2 の損失の和は最大で MI = 0.5 において 1.56 kW に
達している。また,MI < 0.5 の領域では出力電流が S1 と D1 を通過しないため,それら
の損失の和は零である。
図 6.21(b) に 9 次零相電圧重畳を行っている場合の解析結果を示す。ここで,S1 と
S4 の平均スイッチング周波数は 220 ∼ 500 Hz,S2 と S3 の平均スイッチング周波数は
250 ∼ 530 Hz である。図 6.21(a) に示した結果に比べ各パワーモジュール損失は均一化
されている。1 つの IGBT モジュール損失の最大値は,MI = 1.0 における S1 と D1 の
1.20 kW である。
図 6.22 に 1 アームすべての IGBT モジュール S1 & D1 ∼ S4 & D4 合計の損失を示す。
9 次零相電圧重畳を導入の有無によって各 IGBT モジュールの損失は大きく変化するが,
合計の IGBT モジュール損失はほとんど変化していない。これは,各 IGBT モジュール
のスイッチング周波数の総和は 9 次零相電圧重畳に依存しないことに起因する。
6.5.4
システム全体の損失解析結果
図 6.23 に 5 レベルインバータにおける三相すべてのクランプダイオードの合計の損失
を示す。これは,1 アームのクランプダイオードの損失和を 6 倍して算出している。ク
ランプダイオードの損失は 9 次零相電圧の有無にほとんど影響していない。図 6.24 に直
流電圧均一回路の全パワーデバイスの合計の損失を示す。これは,直流電圧均一回路の
正側の全パワーデバイス損失を 2 倍して算出している。9 次零相電圧重畳を重畳しない
場合は最大で MI = 0.55 において 6.10 kW に達している。9 次零相電圧重畳を重畳した
場合は損失が低減され,その最大値は MI = 0.7 において 4.65 kW である。これは,IP1
が MI = 0.71 において最大値となることに起因する。
第 6 章 低速・定格トルク運転への応用
114
図 6.25 に 5 レベルインバータの全パワーデバイスと,直流電圧均一回路の全パワーデ
バイスの合計の損失を示す。これは,図 6.22 に示している 1 アームの IGBT モジュー
ル損失の 6 倍 (三相上下アームすべての合計) にクランプダイオードの全損失と直流電
圧均一回路の全損失を加算して算出している。0 < MI < 0.9 において合計の損失は低
減しているが,これは直流電圧均一回路の損失が 9 次零相電圧重畳によって低減されて
いることに起因する。9 次零相電圧重畳を重畳しない場合は最大で MI = 0.55 において
23.6 kW (定格電力の 1.03%) に達しているが,重畳した場合の最大の損失は MI = 0.7 に
おいて 22.2 kW (0.97%) である。
6.6
過変調域の IGBT モジュール損失
モータドライブでは,三相インバータを過変調域 (MI > 1.0) で用いることがあ
る [61, 137, 138]。過変調域の制御法には 3 次零相電圧重畳が広く用いられている。しか
し,3 次零相電圧重畳を 5 レベルインバータに応用した場合,低変調率時と同様に IGBT
モジュールの損失分布の不均一が問題となる。本節では,過変調域の IGBT モジュール
損失低減に適した零相電圧重畳法を導入する。
6.6.1
3 次零相電圧重畳法
3 次零相電圧を重畳する場合の相電圧指令値は次式で与えられる [61]。
e∗ = 2Vdc · MI sin(ωO t) + 2Vdc · A3 sin(3ωO t)
(6.31)
ここで,ωO = 2πfO であり,fO は基本波周波数である。(6.31) 式の右辺第 2 項が 3 次零
相電圧を表している。また,
A3 = 1.24(MI − 1).
(6.32)
図 6.26 に変調率 MI = 1.1 における各相電圧指令値 vu∗ , vv∗ , vw∗ ,零相電圧指令値 v0∗ と
キャリア波を示す。3 次零相電圧重畳によって各相電圧指令値は外側 2 つのキャリア波
と比較する時間が増加する一方,内側 2 つのキャリア波と比較する時間は減少する。こ
の結果,S1 と S4 のスイッチング周波数が増加し,損失分布の不均一が拡大する。
6.6 過変調域の IGBT モジュール損失
6.6.2
115
改良零相電圧重畳法
本論文では,一部の相電圧指令値を飽和させることで過変調を実現する零相電圧
重畳法 (以下,改良零相電圧重畳法と称す。) を導入する [137]。u, v, w 相の電圧
∗
∗
∗
指令値の基本波成分を vfu
, vfv
, vfw
とする。この基本波成分のなかで最大のものを
∗
∗
∗
∗
∗
∗
} と定義する。改良零
, vfw
, vfv
},最小のものを vmin = min{vfu
, vfw
, vfv
vmax = max{vfu
相電圧重畳法において重畳する零相電圧指令値 v0∗ は次式で与えられる。
−vmax + 2Vdc (vmax > 1)
∗
−vmin − 2Vdc (vmin < −1)
v0 =
0
(otherwise)
(6.33)
(6.33) 式は各相の基本波成分がいずれも 2Vdc ∼ −2Vdc の範囲に収まり飽和しない場合は
零相電圧を重畳せず,各基本波成分の中で 1 つが飽和する場合に零相電圧を重畳してい
る。図 6.27 に改良零相電圧重畳法を適用した場合の各相電圧指令値 vu∗ , vv∗ , vw∗ と零相電
圧指令値 v0∗ を示す。例えば,α の期間では基本波成分が飽和しないため v0∗ = 0 である。
一方,β の期間は基本波成分のみでは飽和するため,零相電圧重畳によって vu = 2Vdc と
している。この期間,u 相上アームの IGBT はすべてオンしているためスイッチング損
失・リカバリ損失が発生しない。つまり,β の期間は二相変調である。また,他の期間
も同様に v0∗ = 0 となる期間と二相変調となる期間に分類できる。一般的な二相変調法
では零相電圧にキャリア周波数成分を含むため,モータドライブにおいて高周波の漏洩
電流が問題となる場合がある。改良零相電圧重畳では二相変調となる期間が限定されて
おり,零相電圧にキャリア周波数成分を含まない点が特長である。
6.6.3
シミュレーション結果
図 6.28 に節点 M を基準にした u 相電圧波形 vuM を示す。(a) に示す 3 次零相電圧重
畳を適用した場合は常に PWM 波形が出力されているのに対し,(b) に示す改良零相電
圧重畳法を適用した場合は 2Vdc (= 4.5 kV) または −2Vdc の電圧を出力し,スイッチング
しない期間が生じている。
図 6.29 に過変調域の損失解析結果を示す。損失解析の手法は 6.5 節と同一である。(a)
に示す 3 次零相電圧重畳適用時において,IGBT モジュールの損失最大値は MI = 1.15
において S1 & D1 の 1.40 kW である。一方,(b) の改良零相電圧重畳法を適用した場合
は,IGBT モジュールの損失の最大値は MI = 1.0 において S1 & D1 の 1.20 kW に低減さ
第 6 章 低速・定格トルク運転への応用
116
れている。
6.7
第 6 章まとめ
本章では,5 レベルダイオードクランプ PWM インバータを用いたモータドライブの
低速・定格トルク運転の検討を行った。5 レベルインバータに 9 次零相電圧を重畳する
手法と,スイッチングシーケンスの自由度を利用した直流電圧均一回路の制御法を提案
し,結合インダクタに生じる磁束のピーク値を設計値以内に抑制できることを実証した。
「PSCAD/EMTDC」を用いたシミュレーションによって,9 次零相電圧重畳は低変調率
域における 5 レベルインバータの IGBT モジュール損失分布の平準化にも寄与すること
を明らかにした。また,過変調域の IGBT モジュール損失低減に適した零相電圧重畳法
を導入し,全変調率域における IGBT モジュール損失分布の平準化を実現した。
6.7 第 6 章まとめ
117
150
vuM
[V]
0
−150
150
vuv
0
[V]
−150
40
iO
[A]
0
−40
150
vP2−M
vP1−M
[V]
0
vN1−M
vN2−M
−150
15
iLP
[A]
0
15
iLN
[A]
0
3
imag
[A]
0
−3
50 ms
図 6.12: 零相電圧を重畳しない場合の定常状態における実験波形 (MI = 0.25,
f = 10 Hz,PO = 920 W,∆D = 0.1)
第 6 章 低速・定格トルク運転への応用
118
150
vuM
[V]
0
−150
150
vuv
0
[V]
−150
40
iO
[A]
0
−40
150
vP2−M
vP1−M
[V]
0
vN1−M
vN2−M
−150
15
iLP
[A]
0
15
iLN
[A]
0
3
imag
[A]
0
−3
50 ms
図 6.13: 9 次零相電圧を重畳した場合の定常状態における実験波形 (MI =
0.25,f = 10 Hz,PO = 920 W,∆D = 0.1)
6.7 第 6 章まとめ
119
150
vuM
[V]
0
−150
150
vuv
0
[V]
−150
40
iO
[A]
0
−40
150
vP2−M
vP1−M
[V]
0
vN1−M
vN2−M
−150
15
iLP
[A]
0
15
iLN
[A]
0
3
imag
[A]
0
−3
50 ms
図 6.14: 9 次零相電圧を重畳した場合の定常状態における実験波形 (MI =
0.25,f = 10 Hz,PO = 920 W,∆D = 0.5)
第 6 章 低速・定格トルク運転への応用
120
no torque ⇐⇒ rated torque
150
vuM
[V]
0
−150
150
vuv
[V]
0
−150
40
iO
[A]
0
−40
150
vP2−M
vP1−M
[V]
0
vN1−M
vN2−M
−150
15
iLP
[A]
0
15
iLN
[A]
0
3
imag
[A]
0
−3
500 ms
図 6.15: 零相電圧を重畳しない場合の負荷トルク急変時における実験波
形 (MI = 0.25,f = 10 Hz,∆D = 0.1)
6.7 第 6 章まとめ
121
no torque ⇐⇒ rated torque
150
vuM
[V]
0
−150
150
vuv
[V]
0
−150
40
iO
[A]
0
−40
150
vP2−M
vP1−M
[V]
0
vN1−M
vN2−M
−150
15
iLP
[A]
0
15
iLN
[A]
0
3
imag
[A]
0
−3
500 ms
図 6.16: 9 次零相電圧を重畳した場合の負荷トルク急変時における実験波
形 (MI = 0.25,f = 10 Hz,∆D = 0.1)
第 6 章 低速・定格トルク運転への応用
122
no torque ⇐⇒ rated torque
150
vuM
[V]
0
−150
150
vuv
[V]
0
−150
40
iO
[A]
0
−40
150
vP2−M
vP1−M
[V]
0
vN1−M
vN2−M
−150
15
iLP
[A]
0
15
iLN
[A]
0
3
imag
[A]
0
−3
500 ms
図 6.17: 9 次零相電圧を重畳した場合の負荷トルク急変時における実験波
形 (MI = 0.25,f = 10 Hz,∆D = 0.5)
6.7 第 6 章まとめ
123
2.25 kV
2.25 kV
2.25 kV
2.25 kV
図 6.18: 損失解析シミュレーション回路
第 6 章 低速・定格トルク運転への応用
124
D1
S1
D2
S2
D3
S3
D4
S4
DC1
DC2
×2
DC3
×3
図 6.19: IGBT モジュールとクランプダイオードの名称定義
Q1
DB1
2.25 kV
Q2
DB2
×2
ILP
2.25 kV
図 6.20: 直流電圧均一回路の損失解析モデル
6.7 第 6 章まとめ
125
power losses [kW]
2.0
1.5
S1 & D1
1.0
S2 & D2
0.5
S3 & D3
S4 & D4
0
0
0.2
0.4
0.6
0.8
Modulation index, MI
1.0
(a) 零相電圧重畳なし
power losses [kW]
2.0
1.5
S1 & D1
1.0
S2 & D2
0.5
S3 & D3
S4 & D4
0
0
0.2
0.4
0.6
0.8
Modulation index, MI
(b) 9 次零相電圧重畳
図 6.21: IGBT モジュールの損失分布
1.0
第 6 章 低速・定格トルク運転への応用
126
3.5
without any harmonic
power losses [kW]
3.0
with ninth harmonic
2.5
2.0
1.5
1.0
0.5
0
0
0.2
0.4
0.6
0.8
Modulation index, MI
1.0
図 6.22: IGBT モジュール S1 & D1 ∼ S4 & D4 合計の損失
power losses [kW]
5.0
without any harmonic
with ninth harmonic
4.0
3.0
2.0
1.0
0
0
0.2
0.4
0.6
0.8
Modulation index, MI
図 6.23: クランプダイオードの損失合計
1.0
6.7 第 6 章まとめ
127
7.0
without any harmonic
power losses [kW]
6.0
with ninth harmonic
5.0
4.0
3.0
2.0
1.0
0
0
0.2
0.4
0.6
0.8
Modulation index, MI
1.0
図 6.24: 直流電圧均一回路の損失
30
without any injection
with ninth injection
power losses [kW]
25
20
15
10
5
0
0
0.2
0.4
0.6
0.8
Modulation index, MI
1.0
図 6.25: インバータと直流電圧均一回路の損失和
第 6 章 低速・定格トルク運転への応用
128
vu∗
2Vdc
vv∗
∗
vw
Vdc
π
0
2π
v0∗
−Vdc
−2Vdc
図 6.26: 3 次零相電圧重畳時の相電圧指令値 vu∗ , vv∗ , vw∗
vu∗
2Vdc
vv∗
∗
vw
Vdc
π
0
2π
v0∗
−Vdc
−2Vdc
α
β
図 6.27: 改良零相電圧重畳法適用時の相電圧指令値 vu∗ , vv∗ , vw∗
6.7 第 6 章まとめ
129
5
vuM
[V]
0
−5
10 ms
(a) 3 次零相電圧重畳法
5
vuM
[V]
0
−5
10 ms
(b) 改良零相電圧重畳法
図 6.28: MI = 1.1, f = 50 Hz におけるシミュレーション波形
S1 & D1
power losses [kW]
1.5
1.0
1.5
1.0
S1 & D1
S2 & D2
0.5
S3 & D3
S2 & D2
0.5
S3 & D3
S4 & D4
0
1.00 1.05 1.10 1.15
MI
(a) 3 次零相電圧重畳法
0
1.00 1.05 1.10 1.15
MI
(b) 改良零相電圧重畳法
図 6.29: 過変調域の IGBT モジュール損失分布
S4 & D4
131
第7章
結論
7.1
本研究の成果
本論文では,5 レベルダイオードクランプ PWM インバータとダイオード整流器を用
いた交流電動機駆動システムにおいてに必要不可欠となる直流電圧均一回路と,その周
辺技術の検討を行った。以下,本論文の主要な成果を示す
■クランプダイオードを付加した直流電圧均一回路の提案
5 レベルインバータの直流
電圧均一回路として 2 台のチョッパ回路を採用した場合,使用する IGBT の耐圧は 5 レ
ベルインバータの IGBT の 2 倍必要である。5 レベルインバータと同耐圧の IGBT を用
いるのであれば 2 直列にする必要があるが,IGBT の電圧分担の均一化が課題となる。
本論文では,2 直列 IGBT にクランプダイオードを付加した直流電圧均一回路を提案
した。これは,スナバ回路だけでなく同時スイッチング技術も用いることなく,2 直列
IGBT の電圧分担を均一化できる。実験により 2 直列 IGBT の印加電圧は分圧コンデン
サ 1 台分となることを確認した。結論として,直流電圧均一回路に用いるゲートドライ
ブ回路は 5 レベルインバータ側と共通化できることを示した。
■結合インダクタを用いた直流電圧均一回路の提案
直流電圧均一回路の実用化にあ
たっては,その重量・体積の大部分を占めるインダクタの小型化が必要不可欠である。
本論文では,結合インダクタを用いた新しい均一回路を提案した。これは,直流磁束を
生じない結合インダクタを採用することで,直流磁束を有する非結合インダクタに比べ
小型化できる点に特長がある。Area Product を用いたインダクタ体積の定量的な検討を
行い,結合インダクタは 2 台の非結合インダクタに比べ,1/6 程度の体積となることを
明らかにした。また,結合インダクタの採用によって,2 台の独立なチョッパ回路では
第7章
132
結論
不可能であった中性点電位制御を実現した。これによって,5 レベルインバータの制御
に頼らず,直流電圧均一回路のみで 4 台すべての分圧コンデンサ電圧の均一化を達成し
た。実験により,分圧不均一の抑制効果を確認し,その有効性を実証した。
■低速・定格トルク運転に適した 5 レベルインバータと直流電圧均一回路の制御 ゴム
ミキサ,押出機,石油掘削リグなどはファン・ブロワと同様に回生動作を必要としない
が,定トルク特性であるため低速域においても定格トルクを必要とする点が大きく異な
る。低速・定格トルク運転では,5 レベルインバータの出力周波数と変調率どちらも低
い領域での動作となり,かつ定格の出力電流を必要とする。これに起因して,結合イン
ダクタの磁束脈動と 5 レベルインバータの IGBT モジュール損失不均一が問題となる。
5 レベルインバータに 9 次零相電圧を重畳する手法と,スイッチングシーケンスの自由
度を利用した直流電圧均一回路の制御法を提案し,結合インダクタに生じる磁束のピー
ク値を設計値以内に抑制できることを実証した。また,
「PSCAD/EMTDC」を用いたシ
ミュレーションによって,9 次零相電圧重畳は 5 レベルインバータの各 IGBT モジュー
ル損失の平準化を実現するだけでなく,直流電圧均一回路を含めたシステム全体の損失
低減にも寄与することを明らかにした。低速・定格トルク運転時にも良好な運転特性を
確認し,本論文で検討したモータドライブシステムは回生が不要なすべての負荷に対応
できることを明らかにした。
7.2
今後の課題
今後さらに検討を必要とする課題を以下に挙げる。
■分圧コンデンサ容量の低減
5 レベルインバータの実用化にあたっては,受動素子 (イ
ンダクタ・コンデンサ) の小型化が望まれる。本論文では直流電圧均一回路におけるイ
ンダクタの小型化を実現した。一方で,直流リンクの分圧コンデンサも同様に小型化が
望まれる。5 レベルインバータは 2 レベルインバータとは異なり,節点 P1,M,N1 に
流入・流出する電流が分圧コンデンサ電圧脈動に影響を与える。しかし,分圧コンデン
サ電圧脈動と 5 レベルインバータの動作状態の関係は定量的に検討されていない。分圧
コンデンサの小型化,つまり容量低減を実現するためには,分圧コンデンサ電圧脈動を
解析し設計指針を明らかにする必要がある。
7.2 今後の課題
■発電制動時の動作検証
133
本論文では,直流電圧均一回路の導入によって,内側 2 台の
分圧コンデンサに抵抗を接続することで発電制動を実現できることを示した。今後は,
シミュレーションおよび実験による動作検証が必要である。
■絶縁を考慮した結合インダクタの設計法
結合インダクタの採用は直流電圧均一回路
の重量・体積を低減できる一方で,結合インダクタの 2 つの巻線間には最大で 6.8 kV 程
度の電位差が生じる。直流電圧均一回路の実用化にあたっては,結合インダクタ巻線間
の絶縁性能について検討する必要がある。
■5 レベルインバータの損失解析の一般化 本論文では 6.6 kV 誘導電動機駆動を前提と
して,モータ力率 0.8,現行の 4.5 kV IGBT・ダイオードの使用に限定して損失解析を
行った。しかし,モータ力率が変化した場合や 5 レベルインバータを整流器に使用した
場合などは損失分布の傾向が変化する。このように条件が変わった場合においても,一
般的に損失解析が可能であることが望ましい。
■低圧モータドライブへの応用
ダイオードクランプ形に限らずマルチレベル変換器の
研究は高圧システムへの応用に主眼を置かれていた。一方で,マルチレベル変換器を低
圧モータドライブに応用した場合,電圧ステップの低減にともないサージ電圧の抑制や
モータ損失の低減などが期待できる。それゆえ,5 レベルインバータの低圧モータドラ
イブへの応用も検討の余地がある。低圧への応用にあたっては,5 レベルインバータの
集積化技術も検討する必要がある。
135
付録
位相シフト制御適用時のパワーフローの解析
図 5.11 における 8 つの period の各位相角 θ1 ∼ θ8 は次式で与えられる。
θ1
θ2
θ3
θ4
θ5
θ6
θ7
θ8
=
2π − β
−ϕ
−π + α+β
2
π−α+ϕ
−π + α+β
−ϕ
2
2π − β
−π + α+β
+ϕ
2
π−α−ϕ
+ϕ
−π + α+β
2
ここで,ϕ は位相シフト角である。また,VℓL と VℓH は次式で表される。
(
) (
)
VℓH
Vdc − 3VQ − VD
=
.
VℓL
−2VQ − 2VD
(1)
(2)
漏れインダクタンスの流入電流 iℓ の解析波形から,Iℓn と Iℓn−1 (n = 1, 2, 3, 4, 5, 6, 7, 8)
の関係は以下の式で与えられる。
Iℓ1 =
1
V
ωℓ ℓH
· θ8 + Iℓ8
(3)
Iℓ2 =
1
V
ωℓ ℓL
· θ1 + Iℓ1
(4)
Iℓ3 =
1
V
ωℓ ℓH
· θ2 + Iℓ2
(5)
Iℓ4 =
1
V
ωℓ ℓL
· θ3 + Iℓ3
(6)
Iℓ5 =
1
V
ωℓ ℓH
· θ4 + Iℓ4
(7)
Iℓ6 =
1
V
ωℓ ℓL
· θ5 + Iℓ5
(8)
Iℓ7 =
1
V
ωℓ ℓH
· θ6 + Iℓ6
(9)
Iℓ8 =
1
V
ωℓ ℓL
· θ7 + Iℓ7
(10)
付録
136
iℓ の直流成分は零であるため,Iℓ1 = −Iℓ6 である。ゆえに (3)(9)(10) 式から以下の関係
式が得られる。
1
(VℓH · θ8 + VℓL · θ7 + VℓH · θ6 ) + Iℓ6
ωℓ
1
=
(VℓH · θ8 + VℓL · θ7 + VℓH · θ6 ) − Iℓ1
ωℓ
Iℓ1 =
(11)
(11) 式を変形して,
1
{VℓH (θ8 + θ6 ) + VℓL · θ7 }.
2ωℓ
(12)
1
1
VℓL · θ1 +
{VℓH (θ8 + θ6 ) + VℓL · θ7 }.
ωℓ
2ωℓ
(13)
Iℓ1 =
(4) 式に (12) 式を代入すると,
Iℓ2 =
ここで,iNM の直流成分を INM とすると,
Iℓ1 + Iℓ2 θ1
·
2
2π
VℓH (θ6 + θ8 ) + VℓL (θ1 + θ7 ) θ1
=
·
.
2ωℓ
2π
INM =
(14)
(14) 式に (1) 式を代入すると,
INM
(
)
1
β
=
{VℓH (−2π + α + β + 2ϕ) + VℓL (3π − α − β − ϕ)} · 1 −
.
2ωℓ
2π
(15)
一方で,vℓ のスイッチング 1 周期における直流平均値は零であることから次式が得ら
れる。
VℓH (θ2 + θ4 + θ6 + θ8 ) + VℓL (θ1 + θ3 + θ5 + θ7 ) = 0
(16)
(16) 式に (1) 式を代入して整理すると,
VℓH (−2π + α + β) + VℓL (3π − α − β) = 0.
(17) 式の関係を用いて,(15) 式を整理すると,
(
)
2VℓH − VℓL
β
INM =
1−
ϕ.
2ωℓ
2π
(18) 式に (2) 式を代入すると,INM は次式で表される。
(
)
Vdc − 2VQ
β
INM = IPM =
1−
ϕ
ωℓ
2π
IPM も同様の解析で求まり,IPM = INM である。
(17)
(18)
(19)
137
参考文献
[1] 宮入庄太: 「パワエレクトロニクスとその動向」, 電学誌, vol. 91, no. 10, pp.
1751–1758, 1971.
[2] W. E. Newell, “Power Electronics—Emerging from Limbo,” IEEE Trans. Ind.
Appl., vol. 10, no. 1, pp. 7–11, Jan./Feb. 1974.
[3] 高田育紀・ゴーラブ マジュムダール: 「パワーモジュールの発展と動向 (I) —パ
ワーデバイス発展の歴史—」, 電学誌, vol. 129, no. 12, pp. 817–820, 2009.
[4] 高田育紀・ゴーラブ マジュムダール: 「パワーモジュールの発展と動向 (II) —IGBT
モジュールへの発展—」, 電学誌, vol. 130, no. 1, pp. 32–36, 2010.
[5] B. Wu, High-Power Converters and AC Drives. Piscataway, NJ: IEEE Press, 2006.
[6] 佐藤克己・山元正則: 「GCT サイリスタの開発状況 —ゲート転流形ターンオフサ
イリスタ」, 電学誌, vol. 118, no. 5, pp. 270–273, 1998.
[7] P. K. Steimer, H. E. Grüning, J. Werninger, E. Carrol, S. Klaka, and S. Linder,
“IGCT — a new, emerging technology for high-power, low-cost inverters,” ABB
review, no. 5, pp. 34–42, 1998.
[8] 関谷恒人・古畑昌一・伊藤伸一・春木弘: 「富士大容量トランジスタ」, 富士時報,
vol. 51, no. 6, pp. 282–286, 1978.
[9] IGBT 図書企画編集委員会: 「世界を動かすパワー半導体 —IGBT がなければ電車
も自動車も動かない—」, 電気学会,2008.
参考文献
138
[10] 松井信行:「ディジタルシグナルプロセッサと電動機制御」, 電学誌, vol. 109, no.
5, pp. 305–311, 1989.
[11] 難波江章: 「小特集: 最近の可変速電動機の技術動向 I. 総論」, 電学誌, vol. 103,
no. 9, pp. 869–870, 1983.
[12] 深尾正: 「小特集: 交流可変速ドライブシステムの高性能・大容量化技術 I. 変換装
置と制御技術」, 電学誌, vol. 108, no. 2, pp. 127–132, 1988.
[13] 交流電動機駆動方式およびその応用技術調査専門委員会編: 「交流電動機の可変速
駆動方式の最新技術およびその応用」, 電気学会技術報告, vol. 1073, 2006.
[14] T. Nakano, T. Iwakane, and H. Akagi, “A narrative of development for vector
control,” IEEJ Trans., vol. 114-D, no. 1, pp. 1–7, 1994. (in Japanese)
中野孝良・岩金孝信・赤木泰文: 「ベクトル制御の開発裏話」, 電学論 D, vol. 114,
no. 1, pp. 1–7, 1994.
[15] K. Hasse, “Zum dynamischen verhalten der asynchron maschine bei betrieb mit
variabler ständerfreqenz und ständer spannung,” ETZ-A, 89, 1968. (in Germany)
[16] F. Blaschke,
“Das prinzip der feldorientierung,
die grundlage für die
TRANSVEKTOR-regelung von drehfeldmaschnen,” Siemens-Z, 45, 1971. (in Germany)
[17] 田中博一郎・永谷康雄・平田昭生・田村昇: 「ベクトル制御インバータによる大形
抄紙機駆動システム」, 東芝レビュー, vol. 34, no. 12, pp. 1069–1075, 1979.
[18] 大庭諭・中野孝良・中村和男: 「スーパーカレンダ設備における交流可変速の適
用」, 電気学会産業電力応用研究会資料, IA-80-3, 1980.
[19] 皆元正博・井上保夫・上村猛・阿部義久: 「十條製紙 (株) 納入スーパカレンダ設
備」, 富士時報, vol. 54, no. 10, pp. 678–682, 1981.
[20] 金東海: 「誘導機のセンサレスベクトル制御」, 電学誌, vol. 112, no. 3, pp. 167–175,
1988.
参考文献
139
[21] H. Umida, “The basic theory and the system configuration of vector control for
induction machine III. The system configuration of speed sensorless vector control,”
IEEJ Trans., vol. 117-D, no. 5, 1997. (in Japanese)
海田英俊: 「誘導機のベクトル制御の基礎と制御システムの実際構成 III. 速度セ
ンサレスベクトル制御システムの実際構成」, 電学論 D, vol. 117, no. 5, 1997.
[22] 野村尚史・大沢博: 「永久磁石同期電動機のセンサレス制御技術」, 富士時報, vol.
75, no. 8, 2002.
[23] M. Tsukakoshi and R. Nakamura, “Techinical trend and capacity increasing for ac
motor drive system,” in Conf. Rec. IEEJ IAS Conference, 1-O4-6, pp. I-163–I-168,
2010. (in Japanese)
塚越昌彦・中村利孝: 「AC モータドライブシステムの動向と大容量化技術」,電
気学会産業応用部門大会,1-O4-6, pp. I-163–I-168, 2010.
[24] K. P. Phillips, “Current-source converter for AC motor drives,” IEEE Trans. Ind.
Appl., vol. 8, no. 6 Nov./Dec. 1972.
[25] B. Wu, S. B. Dewan, and G. R. Slemon, “PWM-CSI inverter for induction motor
drives,” IEEE Trans. Ind. Appl., vol. 28 no. 1, Jan./Feb. 1992.
[26] B. Wu, J. Pontt, J. Rodrı́guez, S. Bernet, and S. Kouro, “Current-source converter
and cycloconverter topologies for industrial medium-voltage drives,” IEEE Trans.
Ind. Electron., vol. 55, no. 7, pp. 2786–2797, July 2008.
[27] P. W. Hammond, “A new approach to enhance power quality for medium voltage
ac drives,” IEEE Trans. Ind. Appl., vol. 33, no. 1, pp. 202–208, 1997.
[28] 下浦拓二・塚越昌彦・大柏芳弘:
「省エネルギーダイレクト AC ドライブ装置」
,東
芝レビュー,vol. 54, no. 1, pp. 57–60, 1999.
[29] 土本直秀・磯田昭二・桑田朗子:「省エネルギー高圧インバータ “MELTRAC-F500HV
シリーズ”」, 三菱電機技報, vol. 73, no. 7, pp. 495–498, 1999.
[30] 椙山繁・嶋田恵三・守永大策・門三野洋二:「省エネルギー追求型の可変速ドライ
参考文献
140
ブシステム」,日立評論,vol. 82, no. 4, pp. 273–278, 2000.
[31] Y. Iwaji, T. Okuyama, D. Kaneko, and S. Okamatsu, “PWM control method
suitable for high voltage multilevel inverters,” IEEJ Trans., vol. 121-D, no. 4, pp.
476–483, 2001. (in Japanese)
岩路善尚・奥山俊昭・金子大吾・岡松茂俊: 「高圧ダイレクトインバータの PWM
制御法」, 電学論 D, vol. 121, no. 4, pp. 476–483, 2001.
[32] 園田敬介・大山哲生・井上康成・桑原裕一・坂瀬清之: 「高圧インバータ FSDriveMV1S」, 技報 安川電機, vol. 70, no. 4, pp. 206–210, 2006.
[33] Y. Tadano, S. Urushibata, K. Ogura, A. Shigaki, and M, Nomura, “A multilevel
PWM strategy suitable for high-voltage motor direct drive systems in consideration
of the adverse effect of a deadtime,” IEEJ Trans., vol. 126-D, no. 1, pp. 1–9, 2006
(in Japansese)
只野裕吾・漆畑正太・小倉和也・紫垣 顕・野村昌克:
「デッドタイムの影響を考慮
した高圧電動機直接駆動多重 PWM 制御法」,電学論 D,vol. 126, no. 1, pp. 1–9,
2006.
[34] 藤本潔・花澤昌彦: 「環境改善・省エネルギー用高圧インバータ」, 富士時報, vol.
80, no. 2, 2007.
[35] 金森教明・村上英樹・小倉和也・庄司豊: 「IEC 対応高圧インバータの開発」, 明
電時報, vol. 329, no. 4, 2010.
[36] A. Nabae, I. Takahashi and H. Akagi, “A new neutral-point-clamped PWM inverter,” IEEE Trans. Ind. Appl., vol.17, No.5, pp.518–523, 1981.
[37] 高橋潤一・執行正謙・小林清隆・伊君高志: 「高品質鋼板を作り出す圧延機用イン
バータドライブシステム」, 日立評論, vol. 82, no. 4, pp. 31–36, 2000.
[38] 執行正謙・永田寛・小林健二・加藤修治: 「熱間圧延設備向け 15 MVA 高圧大容量
IGBT インバータドライブシステム」, 日立評論, vol. 90, no. 12, pp. 80–83, 2008.
[39] 吉川忠光・大串恒二・野村純一: 「IEGT 適用による産業用ドライブ装置及び電力
参考文献
141
用変換装置の省エネと小型・高効率化」, 東芝レビュー, vol. 63, no. 11, pp. 21–26,
2008.
[40] 井上亮二・坂本守・神田淳: 「N700 系新幹線車両用主回路システム」, 富士時報,
vol. 79, no. 2, pp. 110–117, 2006.
[41] 鈴木修一・大田一之・上原秀和・大山裕二: 「東日本旅客鉄道株式会社 E217 系用
静止形補助電源装置」, 東洋電機技報, vol. 118, pp. 11–15, 2008.
[42] 吉川賢一・尾谷浩昭: 「鉄道車両用次期補助電源装置と在来線用試験電車への適
用」, 東芝レビュー, vol. 66, no. 6, pp. 53–56, 2011.
[43] C. Schauder, E. Stacey, M. Lund, L. Gyugyi, L. Kovalsky, A. Keri, A. Mehraban,
and A. Edris, “AEP UPFC project: installation, commissioning and operation of
the ±160 MVA STATCOM (phase I),” IEEE Trans. Power Delivery, vol. 13, no.
4, pp. 1530–1535, 1998.
[44] T. Fujii, H. Chisyaki, H. Teramoto, T. Sato, Y. Matsushita, Y. Shinki, S. Funahashi, and N. Morishita, “Coordinated voltage control and continuous operation of
the 80MVA STATCOM under commercial operation ,” in Conf. Rec. IEEJ/IEEE
PCC-Nagoya, pp. 969–974, 2007.
[45] R. Grünbaum, “SVC Light: a powerful means for dynamic voltage and power
quality control in industry and distribution,” in Conf. Rec. 8th International Conference on Power Electronics and Variable Speed Drives, pp. 404–409, Sep. 2000.
[46] Björn Backlund and Stephan Ebner, “The wind power converter for tomorrow is
already here,” ABB Product Guide, 2011.
[47] 古賀宣考・山中克利・今村広己: 「3 レベルインバータの特長と汎用化技術」, 技
報 安川電機, vol. 65, no. 2, pp. 112–115, 2001.
[48] S. Ogasawara, T. Sawada, and H. Akagi, “Analysis of the neutral point potential
variation of neutral-point-clamped voltage source PWM inverters”, IEEJ Trans.,
vol.113-D, No. 1, pp. 41–48, 1993. (in Japanese)
参考文献
142
小笠原悟司・沢田直・赤木泰文:
「中性点クランプ電圧形 PWM インバータの中性
点電位変動の解析」, 電学論 D, vol.113, No. 1, pp. 41–48, 1993.
[49] T. Ikarashi and S. Kondo, “NPC inverter with regenerative passive snubber and
SJ-MOSFET,” in Conf. Rec. IEEJ Technical Meeting on Semiconductor Power
Converter, SPC-08-52, pp. 1–6, 2008. (in Japanese)
五十嵐友一・近藤正示: 「回生パッシブスナバと SJ-MOSFET を併用した NPC イ
ンバータ」, 電気学会半導体電力変換研究会資, SPC-08-52, pp. 1–6, 2008.
[50] N. S. Choi, J. G. Cho, and G. H. Cho, “A general circuit topology of multilevel
inverter,” in Conf. Rec. IEEE PESC, pp. 96–103, 1991.
[51] R. W. Menzies, P. Steimer, and J. K. Steinke, “Five-level GTO inverters for large
induction motor drives,” IEEE Trans. Ind. Appli., vol. 30, no. 4, pp. 938–944, Aug.
1994.
[52] F. Z. Peng, J.-S. Lai, J. McKeever, and J. VanCoevering, “A multilevel voltagesource converter system with balanced DC voltages,” in Conf. Rec. IEEE PESC.,
pp. 1144–1150, 1995.
[53] J. S. Lai, and F. Z. Peng: “Multilevel converters—A new breed of power converters,” IEEE Trans. Ind. Appl., vol. 32, no. 3, pp. 509–517, 1996.
[54] K. Yokota, O. Ichikawa, and T. Fukao: “The singular point of DC voltage control
system of 5-Level inverter for self-commutated SVC”, in Conf. Rec. IEEJ Technical
Meeting on Semiconductor Power Converter, SPC-99-53, 1999. (in Japanese)
横田計仁・市川修・深尾正:「自励式 SVC に用いる 5 レベル変換器の分圧点電位
制御の特異点」, 電学半導体電力変換研資, SPC-99-53, 1999.
[55] L. M. Tolbert, F. Z. Peng, and T. G. Habetler, “Multilevel converters for large
electric drives,” IEEE Trans. Ind. Appl.., vol.35, no.1, pp.36–44, Jan./Feb. 1999.
[56] C. Newton and M. Sumner, “Novel technique for maintaining balanced internal
DC link voltages in diode clamped five-level inverters,” IEE Proc. -Electr. Power
Appl.., vol. 146, no. 3, pp. 341–349, 1999.
参考文献
143
[57] L. M. Tolbert, F. Z. Peng, and T. G. Habetler, “Multilevel PWM methods at low
modulation indices,” IEEE Trans. Power Electron., vol. 15, no. 4, pp. 719–725,
2000.
[58] S. Yonetani, H. Fujita, and H. Akagi: “Feasibility study of a 6.6-kV, 1-MW transformerless BTB-based loop controller — System design and zero-sequence-current
reduction —” , IEEJ Trans., vol.124-B, No. 11, pp. 1349–1356, (2004) (in Japanese)
米谷心助・藤田英明・赤木泰文: 「6.6kV, 1MW トランスレス BTB 方式ループコ
ントローラ —システム設計と零相電流抑制—」, 電学論 B, vol.124, No. 11, pp.
1349–1356, 2004.
[59] Y. Kondo, H. Fujita and H. Akagi, “A 6.6 kV transformerless STATCOM based on
a five-level diode-clamped converter —Experiment by the three-phase laboratory
model rated at 200 V and 10 kVA—,” IEEJ Trans., vol.127-D, No. 5, pp. 493–500,
2007. (in Japanese)
近藤洋介・藤田英明・赤木泰文: 「5 レベル変換器を用いた 6.6 kV トランスレス
STATCOM —三相 200 V 10 kVA ミニモデルによる実験的検討—」, 電学論 D, 127,
5, pp. 493–500 2007.
[60] N. Hatti, Y. Kondo, and H. Akagi, “Five-level diode-clamped PWM converter
connected back-to-back for motor drives,” IEEE Trans. Ind. Appl., vol. 44, no. 4,
pp. 1268–1276, Jul./Aug. 2008.
[61] N. Hatti, K. Hasegawa, and H. Akagi, “A 6.6-kV transformerless motor drive using
a five-level diode-clamped PWM inverter for energy savings of pumps and blowers,”
IEEE Trans. Power Electron., vol. 24, no. 3, pp. 796–803, Mar. 2009.
[62] M. Saeedifard, R. Iravani, and J. Pou, “Analysis and control of DC-capacitorvoltage-drift phenomenon of a passive front-end five-level converter,” IEEE Trans.
Ind. Electron., vol. 54, no. 6, pp. 3255–3236, 2007.
[63] J. Rodrı́guez, S. Bernet, B. Wu, J. Pontt, and S. Kouro, “Multilevel voltagesource-converter topologies for industrial medium-voltage drives,” IEEE Trans.
Ind. Electron., vol. 54, no. 6, pp. 2930–2945, Dec. 2007.
参考文献
144
[64] S. Busquets-Monge, S. Alepuz, J. Rocabert, and J. Bordonau, “Pulsewidth modulations for the comprehensive capacitor voltage balance of n-level three-leg diodeclamped converters,” IEEE Trans. Power Electron., vol. 24, no. 5, pp. 1364–1375,
May 2009.
[65] Z. Pan and F. Z. Peng, “A sinusoidal PWM method with voltage balancing capability for diode-clamped five-level converters,” IEEE Trans. Ind. Appl., vol. 45, no.
63, pp. 1028–1034, 2009.
[66] 資源エネルギー庁公益事業部: 「高圧または特別高圧で受電する需要家の高調波抑
制ガイドライン」,1994.
[67] S. Srianthumrong, Y. Tamai, and H. Akagi, “A proposal of a 3.3-kV/6.6-kV transformerless hybrid filter, and experimental verification based on a 200-V laboratory
system,” IEEJ Trans., Vol.122-D, No.10, pp.989–998, 2002. (in Japanese)
Sunt Srianthumrong・玉井康寛・赤木泰文: 「3.3kV/6.6kV トランスレス・ハイブ
リッドフィルタの提案と 200V ミニモデルによる実験的検討」, 電学論 D, 122, 10,
pp. 989–998, 2002.
[68] Y. Tamai, S. Srianthumrong, and H. Akagi, “Comparisons between a hybrid shunt
active filter and a pure shunt active filter,” IEEJ Trans., Vol.124-D, No. 5, pp.
494–502, 2002. (in Japanese)
玉井康寛・Sunt Srianthumrong・赤木泰文: 「ハイブリッドフィルタとアクティブ
フィルタの比較・検討」, 電学論 D, 124, No. 5, pp. 494–502, 2004.
[69] R. Kondo and H. Akagi, “A voltage-balancing control in a three-level converter
with a transformerless hybrid active filter,” IEEJ Trans., vol.128-D, No. 12, pp.
1388–1395, 2008. (in Japanese)
近藤亮太・赤木泰文: 「トランスレス・ハイブリッドフィルタにおける 3 レベル
PWM コンバータの中性点電位制御」, 電学論 D, 128, 12, pp. 1388–1395, 2008.
[70] R. Kondo and H. Akagi, “A transformerless hybrid active filter capable of complying with harmonic guidelines for medium-voltage motor drives,” IEEJ Trans.,
vol.129-D, No. 9, pp. 899–906, 2009. (in Japanese)
参考文献
145
近藤亮太・赤木泰文: 「電源高調波規制に対応した高圧モータドライブ用トランス
レス・ハイブリッドフィルタ」, 電学論 D, 129, 9, pp. 899–906, 2009.
[71] K. Isozaki and H. Akagi, “Harmonic filtering performance of a hybrid active filter
for a three-phase 12-pulse diode rectifier,” IEEJ Trans., vol.1130-D, No. 12, pp.
1341–1348, 2010. (in Japanese)
磯崎幸平・赤木泰文: 「三相 12 パルスダイオード整流回路用ハイブリッドフィル
タの高調波抑制効果」, 電学論 D, 130, No. 12, pp. 1341–1348, 2010.
[72] R. Bhatia, H. U. Krattiger, A. Bonanini, D. Schafer, J. T. Inge, and G. H. Sydnor,
“Adjustable speed drive with a single 100-MW synchronous motor,” ABB review,
no. 6, pp. 14–20, 1998.
[73] 小松康佑・原田孝仁・中澤治雄: 「アドバンスト NPC 回路用 IGBT モジュール」,
富士時報,vol. 83, no. 6, pp. 362–365, 2010.
[74] M. Schweizer and J. W. Kolar, “High efficiency drive system with 3-level T-type
inverter,” in Conf. Rec. 14th European Conference on Power Electronics and Applications (EPE), Sep. 2011.
[75] T. Brückner, S. Bernet, and H. Güldner, “The active NPC converter and its lossbalancing control,” IEEE Trans. Ind. Electron., vol. 52, no. 3, pp. 855–868, 2005.
[76] P. Barbosa, P. Steimer, J. Steinke, L. Meysenc, M. Winkelnkemper, and N.
Celanovic, “Active Neutral-Point-Clamped Multilevel Converters,” in Conf. Rec.
IEEE PESC, pp. 2296–2301, June 2005.
[77] Y. Kashihara and J. Itoh, “Parametric design of five-level active NPC inverter,”
IEEJ Trans., vol. 131-D, no. 12, pp. 1383–1392, 2011. (in Japanese)
樫原有吾・伊東淳一: 「5 レベルアクティブ NPC インバータのパラメータ設計」,
電学論 D, vol. 131, no. 12, pp. 1383–1392, 2011.
[78] J. Itoh, Y. Noge, and T. Adachi, “A novel five-level three-phase PWM rectifier with
reduced switch count,” IEEE Trans. Power Electron., vol. 26, no. 8, pp. 2221–2228,
Aug. 2011.
参考文献
146
[79] Y. Noge and J. Itoh, “An experimental verification of a simplified five-level PWM
rectifier with twelve switches for use in high-frequency power supply systems,”
IEEJ Trans., vol. 132-D, no. 1, pp. 35–41, 2012. (in Japanese)
野下裕市・伊東淳一: 「12 スイッチで構成する 5 レベル PWM 整流器の高周波電
源下での動作検証」, 電学論 D, vol. 132, no. 1, pp. 35–41, 2012.
[80] J. Li, S. Bhattacharya, and A. Q. Huang, “A new nine-level active NPC (ANPC)
converter for grid connection of large wind turbines for distributed generation,”
IEEE Trans. Power Electron., vol. 26, no. 3, pp. 961–972, Mar. 2011.
[81] P. K. Steimer and M. D. Manjrekar, “Practical medium voltage converter topologies
for high power applications,” in Conf. Rec. IEEE IAS Annu. Meeting, vol.3, pp.
1723–1730, Oct. 2001.
[82] H. Sepahvand, M. Ferdowsi, and K. A. Corzine, “Fault recovery strategy for hybrid cascaded H-bridge multi-level inverters,” in Conf. Rec. IEEE Applied Power
Electronics Conference (APEC), pp. 1629–1633, Mar. 2011.
[83] D. A. Paice, “Power electronic converter harmonics: Multipulse methods for clean
power,” IEEE Press, 1996.
[84] M. Swamy, T. Kume, and N. Takada, “A hybrid 18-pulse rectification scheme for
diode front end variable frequency drives,” in Conf. Rec. IEEE ECCE, pp. 1562–
1568, Sep. 2009.
[85] ABB, “Guide to harmonics with AC drives,” ABB Technical Guide, No. 6, 2011.
[86] 武藤和弘・西條学・森山琴也: 「世界最大級のアルミ電解用整流設備」, 富士時報,
vol. 80, no. 2, pp. 124–130, 2007.
[87] 家坂進・小倉常雄・西谷和展: 「パワーエレクトロニクス用大容量 IEGT」, 東芝
レビュー, vol. 55, no. 7, pp. 7–10, 2000.
[88] D. Yoshizawa, K. Takao, M. Mukunoki, and Y. Shimomura, “The large capacity
5 level GCT inverter for oil & gas plant application,” in Conf. Rec. IEEJ IAS
参考文献
147
Conference, No. 1-79, pp. I-359–I-362, 2008. (in Japanese)
吉沢大輔・高尾健志・椋木誠・下村弥寿仁:「OIL & GAS 向け大容量 5 レベル GCT
インバータ」,電気学会産業応用部門大会, No. 1-79, pp. I-359–I-362, 2008.
[89] Y. Ishida, M. Mukunoki, and O. Tanaka, “The large capacity five-level IGBT
inverter,” in Conf. Rec. IEEJ Annu. Meeting, No. 4-001, pp. 1, 2009. (in Japanese)
石田裕介・椋木誠・田中修:「大容量 5 レベル IGBT インバータ」,電学全大, No.
4-001, pp. 1, 2009.
[90] D. Yoshizawa, M. Mukunoki, and O. Tanaka, “The large capacity five-level IEGT
inverter,” in Conf. Rec. IEEJ Annu. Meeting, No. 4-054, pp. 91, 2010. (in Japanese)
吉沢大輔・椋木誠・田中修:「大容量 5 レベル IEGT インバータ」,電学全大, No.
4-054, pp. 91, 2010.
[91] Y. Ueda, M. Ikeda, R. Suenaga, K. Imanishi, E. Masuda, and E. Watanabe, “Development on medium-voltage matrix converter,” in Conf. Rec. IEEJ Annu. Meeting,
No. 4-103,pp. 163–164,2007. (in Japanese)
上田洋三・池田正規・末永龍二・今西健一・益田英治・渡邊英司: 「高圧大容量マ
トリクスコンバータの開発」,電学全大,No. 4-103,pp. 163–164,2007.
[92] E. Yamamoto, H. Hara, T. Uchino, M. Kawaji, T. J. Kume, J. K. Kang, and H. -P.
Krug, “Development of MCs and its applications in industy,” IEEE Ind. Electron.
Magazine, vol. 5, no. 1, pp. 4–12, 2011.
[93] T. A. Meynard and H. Foch, “Multi-level conversion: high voltage choppers and
voltage-source inverters,” in Conf. Rec. IEEE PESC, vol. 1, pp. 397–403, Jun.
1992.
[94] H. Akagi, “Classification, terminology, and application of the modular multilevel
cascade converter (MMCC),” IEEE Trans. Power Electron., vol. 26, no. 11, pp.
3119–3130, Nov. 2011.
[95] T. Yoshii, S. Inoue, and H. Akagi, “A 6.6-kV transformerless cascade PWM
STATCOM — experimental verification by a 200-V, 10-kVA laboraory system —,”
参考文献
148
IEEJ Trans., vol. 127-D, no. 8, pp. 781–788, 2007. (in Japanese)
吉井剣・井上重徳・赤木泰文:
「6.6 kV トランスレス・カスケード PWM STATCOM
— 三相 200 V,10 kVA ミニモデルによる動作検証 —」,電学論 D,vol. 127, no.
8, pp. 781–788, 2007.
[96] L. Maharjan, T. Yamagishi, and H. Akagi, “Active-Power Control of Individual
Converter Cells for a Battery Energy Storage System Based on a Multilevel Cascade
PWM Converter,” IEEE Trans. Power Electron., vol. 27, no. 3, pp. 1099–1107,
Mar. 2012.
[97] M. Hagiwara, R. Maeda, and H. Akagi, “Application of a modular multilevel cascade converter (MMCC-SDBC) to a STATCOM,” IEEJ Trans., vol. 131-D, no. 12,
pp. 1433–1441, 2011. (in Japanese)
萩原誠・前田亮・赤木泰文: 「モジュラー・マルチレベル・カスケード変換器
(MMCC-SDBC) の STATCOM への応用」, 電学論 D, vol. 131, no. 12, pp. 1433–
1441, 2011.
[98] R. Marquardt and A. Lesnicar, “A new modular voltage source inverter topology,”
in Conf. Rec. European Conference on Power Electronics and Applications (EPE),
2003.
[99] M. Hagiwara and H. Akagi, “PWM control and experiment of modular multilevel
converters,” IEEJ Trans, vol.128-D, no. 7, pp. 957–965, 2008. (in Japanese)
萩原誠・赤木泰文: 「モジュラー・マルチレベル変換器 (MMC) の PWM 制御法と
動作検証」,電学論 D,128,No. 7, pp. 957–965, 2008.
[100] M. Hagiwara, K. Nishimura, and H. Akagi, “A medium-voltage motor drive with
a modular multilevel PWM inverter Part I. Experimental verification by a 400-V,
15-kW downscaled model,” IEEJ Trans, Vol.130-D, No. 4, pp. 544–551, 2010. (in
Japanese)
萩原誠・西村和敏・赤木泰文: 「モジュラー・マルチレベル PWM インバータを用
いた高圧モータドライブ 第 1 報: 400V,15kW ミニモデルによる実験的検証」
,電
学論 D,130,No. 4,pp. 544–551,2010.
参考文献
149
[101] K. Nishimura, M. Hagiwara, and H. Akagi, “A medium-voltage motor drive with
a modular multilevel PWM inverter Part II. Startup method and performance,”
IEEJ Trans, Vol.130-D, No. 4, pp. 544–551, 2010. (in Japanese)
西村和敏・萩原誠・赤木泰文: 「モジュラー・マルチレベル PWM インバータを用
いた高圧モータドライブ 第 2 報: 始動法と始動特性」
,電学論 D,130,No. 4,pp.
552–559,2010.
[102] K. Nishimura, M. Hagiwara, and H. Akagi, “Experimental verification of an
adjustable-speed motor drive by a modular multilevel cascade inverter (MMCIDSCC) without dc-link capacitors,” in Conf. Rec. IEEJ Annu. Meeting, No. 4-046,
pp. 77–78,2010. (in Japanese)
西村和敏・萩原誠・赤木泰文: 「モジュラー・マルチレベル・カスケードインバー
タ (MMCI-DSCC) を用いたモータドライブの実験検証」,電学全大,No. 4-046,
pp. 77–78,2010.
[103] A. J. Korn, M. Winkelnkemper, and P. Steimer, “Low Output Frequency Operation of the Modular Multi-Level Converter,” in Conf. Rec. IEEE ECCE, pp.
3993–3997, Sep. 2010.
[104] I. Hasegawa, M. Hagiwara, and H. Akagi, “Low-frequency operation of a mediumvoltage motor drive using a modular multilevel cascade inverter (MMCI-DSCC),”
in Conf. Rec. IEEJ Technical Meeting on Semiconductor Power Converter, SPC10-043, pp. 91–96, 2012. (in Japanese)
長谷川勇・萩原誠・赤木泰文: 「モジュラー・マルチレベル・カスケードインバー
タ (MMCI-DSCC) を用いたモータドライブの低周波数運転」
,電気学会半導体電力
変換研究会資,SPC-10-043, pp. 91–96, 2012.
[105] W. Kawamura, N. Thitichaiworakorn, M. Hagiwara, and H. Akagi, “Modular
multilevel cascade converters (MMCC) — V. Applications of the DSBC to wind
turbine generation systems,” in Conf. Rec. IEEJ IAS Conference, No. 1-40, pp.
I-255–258, 2011. (in Japanese)
川村弥・Nuntawat Thitichaiworakorn・萩原誠・赤木泰文: 「モジュラー・マル
チレベル・カスケード変換器 (MMCC) — V. DSBC(Double-Star Bridge-Cells) 方
参考文献
150
式の風力発電システムへの応用 —」,電気学会産業応用部門大会,No. 1-40, pp.
I-255–258, 2011.
[106] L. Ängquist, A. Haider, H. -P. Nee, and H. Jiang, “Open-loop approach to control
a modular multilevel frequency converter,” in Conf. Rec. 14th European Conference
on Power Electronics and Applications (EPE), Sep. 2011.
[107] S. Inoue and H. Akagi, “A bi-directional isolated dc/dc converter as a core circuit
for 3.3-kV/6.6-kV power conversion systems in the next generation,” IEEJ Trans.,
vol. 126-D, no. 3, pp. 211-217, 2006. (in Japanese)
井上重徳・赤木泰文: 「次世代 3.3 kV/6.6 kV 電力変換システムのコア回路とし
ての双方向絶縁形 DC/DC コンバータ」,電学論 D,vol. 126, no. 3, pp. 211-217,
2006.
[108] Rik W. A. A. De Doncker, D. M. Divan, and M. H. Kheraluwala, “A threephase soft-switched high-power-density dc/dc converter for high-power applications,” IEEE Trans. Ind. Appl., vol. 27, no. 1, pp. 63–73, Jan./Feb. 1991.
[109] R. Kitada and H. Akagi, “Method for controlling a multilevel cascade BTB system
using bidirectional DC/DC converters,” IEEJ Trans., vol. 130-D, No. 12, pp.1307–
1314, 2010. (in Japanese)
北田 亮平・赤木 泰文: 「複数台の双方向絶縁形 DC/DC コンバータを用いたマ
ルチレベル・カスケード BTB システムの制御法」,電学論D, vol. 130, No. 12,
pp.1307–1314, 2010.
[110] K. Sano and H. Fujita: “A new control method of a resonant switched-capacitor
and the application for balancing of the split DC voltages in a multilevel inverter,”
IEEJ Trans., vol.127-D, No. 3, pp. 330–338, 2007. (in Japanese)
佐野憲一朗・藤田英明: 「共振形スイッチトキャパシタコンバータの新制御法とマ
ルチレベルインバータの直流電圧均一化回路への応用」, 電学論 D, vol. 127, no. 3,
pp. 330–338, 2007.
[111] K. Sano and H. Fujita: “Dynamic control and performance of a resonant switchedcapacitor converter based on phase-shift control,” IEEJ Trans., vol.128-D, No. 10,
参考文献
151
pp. 1190–1197, 2008. (in Japanese)
佐野憲一朗・藤田英明: 「位相シフト制御法を適用した共振形スイッチトキャパシ
タコンバータの過渡特性の改善」, 電学論 D, vol. 128, no. 10, pp. 1190–1197, 2008.
[112] K. Sano and H. Fujita: “Current rating reduction of the RSCC voltage-balancing
circuit for a diode-clamed five-level inverter,” in Conf. Rec. IEEJ IAS Conference,
1-141, pp. 549–552, (2008) (in Japanese)
佐野憲一朗・藤田英明: 「ダイオードクランプ形 5 レベル変換器用 RSCC 直流
電圧均一化回路の電流定格低減の検討」, 電気学会産業応用部門大会, 1-141, pp.
549–552, 2008.
[113] T. Ito, M. Kamaga, Y. Sato, and H. Ohashi, “An investigation of voltage balancing circuit for DC capacitors in diode-clamped multilevel inverters to realize
high output power density converters,” in Conf. Rec. IEEE ECCE, pp. 3675–3682,
2010.
[114] S. Kato, S. Ueda, H. Sakai, and H. Aizawa, “Active-gate-control for snubberless
IGBTs connected in series,” IEEJ Trans., vol. 122-D, No. 8, pp.816–822, 2002. (in
Japanese)
加藤修治・上田茂太・酒井洋満・相澤英俊: 「スナバレス IGBT 直列接続に適した
アクティブゲートコントロール」,電学論 D,vol. 122 , No.8, pp.816–822, 2002.
[115] K. Sasagawa, Y. Abe and K. Matsuse: “Voltage-balancing method for IGBTs
connected in series,” IEEE Trans. Ind. Appl., vol.40, No.4, pp.1025–1030, 2004.
[116] H. Fujita, S. Tominaga, and H. Akagi, “Analysis and design of a dc voltagecontrolled static var compensator using quad-series voltage-source inverters,” IEEE
Trans. Ind. Appl., vol. 32, no. 4, pp.970–977, 1996.
[117] G. V. Torrico-Bascope and I. Barbi, “A single phase PFC 3kW converter using a
three-state switching cell,” in Conf. Rec. IEEE PESC, pp. 4037–4042, 2004.
[118] W. Wen and Y. Lee, “A two-channel interleaved boost converter with reduced
core loss and copper loss,” in Conf. Rec. IEEE PESC, pp. 1003–1009, 2004.
参考文献
152
[119] K. Hasegawa and T. Shimizu, “An analysis of DC magnetization of a coupled
inductor on a boost chopper,” in Conf. Rec. IEEJ Annu. Meeting, No. 4-067, pp.
99 2007. (in Japanese)
長谷川一徳・清水敏久: 「結合インダクタ式チョッパの直流偏磁の解析」, 電学全
大, 4-067, pp. 99, 2007.
[120] M. Hirakawa, M. Nagano, Y. Watanabe, K. Andoh, S. Nakatomi, and S. Hashino,
“High power density dc/dc converter using the close-coupled inductors,” in Conf.
Rec. IEEE ECCE, pp. 1760–1767, 2009.
[121] M. Hirakawa, M. Nagano, Y. Watanabe, K. Andoh, S. Nakatomi, S. Hashino, and
T. Shimizu, “High power dc/dc converter using extreme close-coupled inductors
aimed for electric vehicles,” in Conf. Rec. IEEJ/IEEE IPEC-Sapporo, pp. 2941–
2948, 2010.
[122] H. Li, F. Z. Peng, and J. S. Lawler, “A natural ZVS medium-power bi-directional
DC-DC converter with minimum number of devices,” IEEE Trans. Ind. Appl., vol.
39, no. 2, pp. 525–535, Mar./Apr. 2003.
[123] F. Z. Peng, H. Li, G.-J. Su, and J. S. Lawler, “A new ZVS bi-directional DC-DC
converter for fuel cell and battery application,” IEEE Trans. Power Electron., vol.
19, no. 1, pp. 54–65, Jan. 2004.
[124] W. T. McLyman, Transformer and inductor design handbook. New York: Marcel
Dekker, 1988.
[125] W. J. Gu, R. Liu, “A study of volume and weight vs. frequency for high-frequency
transformers,” in Conf. Rec. IEEE PESC, pp. 1123–1129, 1993.
[126] M. K. Blumenthal, “Variable speed AC drives for cement kilns,” in Conf. Rec.
IEEE Cement Industry Technical Conference, pp. 133–140, 1993.
[127] R. A. Hannna and S. W. Randall, “Medium-voltage adjustable-speed-drive retrofit
of an existing eddy-current clutch extruder application,” IEEE Trans. Ind. Appl.,
vol. 36, no. 6, pp. 1750–1755, Nov./Dec. 2000.
参考文献
153
[128] H. Schreiber, “The application of a vector controlled AC drive for internal batch
mixing of rubber compounds,” in Conf. Rec. IEEE 43rd Annual Conference of
Electrical Engineering Problems in the Rubber and Plastics Industries, pp. 6–9,
Apr. 1991.
[129] K. Nagata, T. Okuyama, H. Nemoto, and T, Katayama, “A simple robust voltage
control of high power sensorless induction motor drives with high start torque
demand,” IEEE Trans. Ind. Appl., vol. 44, no. 2, pp. 604–611, Mar./Apr. 2008.
[130] T. Hoevenaars, I. C. Evans, A. Lawson, “New marine harmonic standards,” IEEE
Ind. Appl. Magazine, vol. 16, no. 1, pp. 16–25, Jan./Feb. 2010.
[131] B. I. Abramov, L. N. Makarov, B. M. Breslav, V. M. Ponomarev, and B. M.
Parfenov, “Asynchronous electric motors for variable-frequency electric drives of
drilling rigs,” Russian Electrical Engineering, vol. 80, no. 1, pp. 10–14, 2009.
[132] 長縄成実:「最新の坑井掘削技術 (その 1)」,石油開発時報, no. 148, pp. 5–13, 2006.
[133] 木村健・匹田政幸: 「インバータサージと国際規格」, 電学誌, Vol. 126, No. 7,
pp.419–422, 2006.
[134] I. Matsumura and H. Akagi, “Modeling and filter design for overvoltage mitigation
in a motor drive system with a long cable,” IEEJ Trans., vol. 129-D, no. 8, pp.
844–851, 2009. (in Japanese)
松村周・赤木泰文: 「ロングケーブルを使用したモータ駆動システムのモデリン
グとサージ電圧抑制フィルタの設計法」, 電学論 D, vol. 129, no. 8, pp. 844–851,
2009.
[135] [Online]. Available: http://pscad.com/
[136] [Online]. Available: http://www.mitsubishichips.com/Global/index.html
[137] M. Depenbrock, “Pulse width control of a 3-phase inverter with nonsinusoidal
phase voltages,” in Conf. Rec. IEEE ISPCC, pp. 399–403, 1977.
[138] A. M. Hava, R. J. Kerkman, and T. A. Lipo, “Carrier-based PWM-VSI overmodu-
参考文献
154
lation strategies: analysis, comparison, and design,” IEEE Trans. Power Electron.,
vol. 13, no. 4, pp. 674–689, July 1998.
155
発表論文
学会誌論文
[1] Kazunori Hasegawa, Nachpong Hatti, and Hirofumi Akagi, “A transformerless
motor drive with a five-level diode-clamped PWM inverter for fan/blower loads”,
IEEJ Transactions on Industry Applications, vol.129-D, no. 4, pp. 438–445, 2009.
(in Japanese)
長谷川一徳・Natchpong Hatti・赤木泰文: 「5 レベルダイオードクランプ PWM
インバータを用いたトランスレス・モータドライブ—ファン・ブロワ負荷への応
用—」, 電気学会論文誌 D(産業応用部門誌), vol.129, no. 4, pp. 438–445, 2009.
[2] Kazunori Hasegawa and Hirofumi Akagi, “A dc-voltage-balancing circuit for a fivelevel diode-clamped PWM inverter intended for motor drives,” IEEJ Transactions
on Industry Applications, vol.130-D, no. 5, pp. 677–684, 2010. (in Japanese)
長谷川 一徳・赤木 泰文: 「モータドライブ用 5 レベルダイオードクランプ PWM
インバータに適した直流電圧均一回路」, 電気学会論文誌 D(産業応用部門誌), vol.
130, no. 5, pp. 677–684, 2010.
[3] Kazunori Hasegawa and Hirofumi Akagi, “A new dc-voltage-balancing circuit including a single coupled inductor for a five-level diode-clamped PWM inverter,”
IEEE Transactions on Industry Applications, vol. 47, no. 2, pp. 841–852,
Mar./Apr. 2011.
[4] Kazunori Hasegawa and Hirofumi Akagi, “Low-modulation-index operation of a
five-level diode-clamped PWM inverter with a dc-voltage-balancing circuit for a
motor drive,” IEEE Transactions on Power Electronics, (accepted, to be published
in 2012).
発表論文
156
国際会議
[1] Kazunori Hasegawa and Hirofumi Akagi, “A new dc-voltage-balancing circuit including a single coupled inductor for a five-level diode-clamped PWM inverter,”
IEEE Energy Conversion Congress & Exposition (ECCE), pp. 2153–2159, Sep.
2009.
[2] Kazunori Hasegawa and Hirofumi Akagi, “Voltage balancing of the four split DC
capacitors for a five-level diode-clamped PWM inverter with a front-end diode rectifier,” IEEJ/IEEE International Power Electronics Conference (IPEC-Sapporo)
–ECCE Asia, pp. 734–739, Jun. 2010.
[3] Kazunori Hasegawa and Hirofumi Akagi, “Low-speed rated-torque operation of a
motor drive using a five-level diode-clamped PWM inverter with a front-end diode
rectifier,” IEEE International Conference on Power Electronics (ICPE) –ECCE
Asia, pp. 1371–1377, Jun. 2011.
国内会議
[1] 長谷川一徳・Natchpong Hatti・赤木泰文: 「5 レベル PWM インバータを用いた省
エネルギー対応モータドライブ」
,平成 20 年電気学会全国大会,4-128,pp.212–213,
2008 年 3 月
[2] 長谷川一徳・Natchpong Hatti・赤木泰文: 「5 レベルダイオードクランプ PWM
インバータを用いたモータドライブ —ファン・ブロワ負荷への応用—」,電気
学会半導体電力変換/産業電力電気応用合同研究会,SPC-08-79/IEA-08-17,pp.
35–40,2008 年 6 月
[3] 長谷川一徳・赤木泰文: 「モータドライブ用 5 レベル PWM インバータに適した
直流電圧均一回路」,平成 21 年電気学会全国大会,4-005,pp.8–9,2009 年 3 月
[4] 長谷川一徳・赤木泰文: 「モータドライブ用 5 レベルダイオードクランプ PWM
インバータに適した直流電圧均一回路」,平成 21 年電気学会産業応用部門大会,
1-56,pp. I-373-I-378,2009 年 8 月
157
[5] 長谷川一徳・赤木泰文: 「5 レベルダイオードクランプ PWM インバータ用直流電
圧均一回路—中性点電位制御への応用—」,平成 22 年電気学会全国大会,4-048,
pp.81–82,2010 年 3 月
[6] 長谷川一徳・赤木泰文: 「絶縁型 DC/DC コンバータを用いた新方式双方向チョッ
パ回路」
,平成 22 年電気学会産業応用部門大会,1-126,pp. I-595-I-598,2010 年 8
月
[7] 長谷川一徳・赤木泰文: 「5 レベルダイオードクランプ PWM インバータを用い
たモータドライブの低速・定格トルク運転」
,平成 23 年電気学会全国大会,4-080,
pp. 147-148, 2011 年 3 月
[8] 長谷川一徳・赤木泰文: 5 レベルダイオードクランプ PWM インバータ用直流電
圧均一回路のモータ低速運転時の制御」,平成 23 年電気学会産業応用部門大会,
1-5, pp. I-115–I-118, 2011 年 9 月
[9] 長谷川一徳・赤木泰文: 「5 レベルダイオードクランプ PWM インバータの過変
調域の IGBT モジュール損失低減」,平成 24 年電気学会全国大会,4-048, (2012
年 3 月発表予定)
共著論文
[1] Nachpong Hatti, Kazunori Hasegawa, and Hirofumi Akagi, “A 6.6-kV transformerless motor drive using a five-level diode-clamped PWM inverter for energy
savings of pumps and blowers,” IEEE Power Electronics Specialist Conference
(PESC), pp. 352–358, Jun. 2008.
[2] Nachpong Hatti, Kazunori Hasegawa, and Hirofumi Akagi, “A 6.6-kV transformerless motor drive using a five-level diode-clamped PWM inverter for energy
savings of pumps and blowers,” IEEE Transactions on Power Electronics, vol. 24,
no. 3, pp. 796–803, Mar. 2009.
発表論文
158
特許
[1] 発明の名称: 電圧均一回路,発明者: 赤木泰文・長谷川一徳,出願番号: 特願
2009-063567,出願日:2009 年 3 月 16 日,整理番号:08T229(公開中)
[2] 発明の名称:DCDC コンバータ,発明者:赤木泰文・長谷川一徳,出願番号:
特願 2010-185066, 出願日: 2010 年 8 月 20 日,整理番号: 10T021,発明届番号:
2010-0022 (申請中)
表彰等
[1] IPEC-Sapporo Student Paper Award (電気科学技術奨励学生賞),(国際会議 [2])
[2] 日本学術振興会特別研究員 DC2(2010 年 4 月 ∼ 2012 年 3 月)
159
謝辞
本論文の完成にあたり,指導教員である赤木泰文教授に心よりお礼申し上げます。ご
多用の中,研究の本質だけでなく,対外発表や論文執筆にいたるまできめ細かにご指導
頂いた結果としてこのように論文を書き上げることができました。パワーエレクトロニ
クス回路に関して鋭敏な視点から数多くの貴重なご意見を頂きました藤田英明准教授に
厚くお礼申し上げます。
電力グループの石井彰三名誉教授,安岡康一教授,千葉明教授,高橋宏治准教授,な
ら び に 漆畑廣明連携教授 (現・三 菱 電 機), 西村正連携教授 ,
冨永真志連携准教授 ,
片岡良彦連携准教授 (現・東京電力) ,高見潤連携准教授に深くお礼申し上げます。ご多
用の中,外部審査員として有益なご指摘を頂きました日立研究所主管研究員 岩路善尚氏
に心よりお礼申し上げます。
研究遂行だけでなく,研究室での生活全般でお世話になりました萩原誠助教にお礼申し
上げます。同じ研究グループのメンバーとして研究活動を共にした Natchpong Hatti 氏
(現・NECTEC, Thiland),平戸貴之氏に深くお礼申し上げます。井上重徳氏 (現・日立製
作所),佐野憲一朗氏 (現・電力中央研究所),近藤亮太氏 (現・三菱電機),松村周氏 (現・
鉄道総合技術研究所),西村和敏氏 (現・関西電力) をはじめ,ともに議論を交わした多
くの先輩,同輩,後輩の諸氏に深く感謝申し上げます。煩雑な事務処理を肩代わりし
て頂くことで円滑な研究遂行を助けて下さいました赤木・藤田研究室秘書 水村直美氏,
遠山佳代子氏,並びに技術職員 福本孝志氏にお礼申し上げます。メンター教員として貴
重なご意見を頂きました,東芝三菱電気産業システム 川上紀子氏,中村利孝氏,富士
電機 松本康氏,三野和明氏,東京工業大学集積システム専攻 國枝博昭教授にお礼申し
上げます。
筆者がパワーエレクトロニクスの研究者を志すきっかけを与えて下さった首都大学東
京 (東京都立大学) 清水敏久教授に厚くお礼申し上げます。研究内容のみならず,研究生
160
謝辞
活全般で多くの助言を頂きました首都大学東京 (東京都立大学) 和田圭二准教授に深く感
謝申し上げます。
3 ヶ月間にわたる海外研修の依頼を快諾していただき,多くの有益な研究指導を賜り
ました米国 Michigan State University, Power Electronics and Motor Drives Laboratory
の Fang Zheng Peng 教授に厚くお礼申し上げます。また,Xi Lu 氏をはじめ多くのご支
援を頂きました同研究室の諸氏に感謝申し上げます。
なお,本研究は,日本学術振興会科学研究費補助金 (課題番号:22・9253) の支援を受
けて行われました。ここに付記し,お礼申し上げます。
最後に,長きに亘り私の学生生活を支えて下さった両親に心より感謝申し上げます。
© Copyright 2026 Paperzz