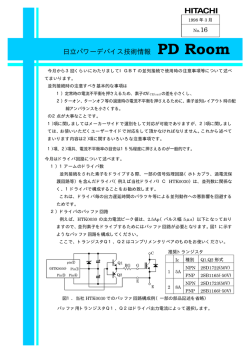
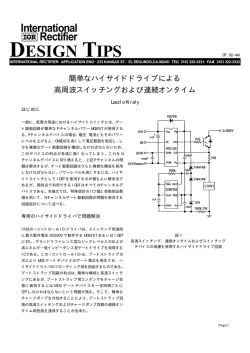
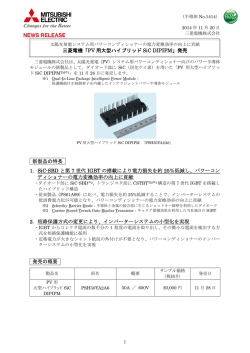
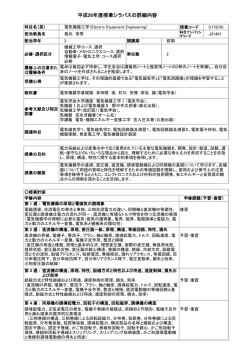
見本 パワーエレクトロニクスシステムの パ クト ク シ ム 基礎と応用 ~ 実践 システム設計 システム設計・モデリング技術 モデリング技術 ~ 長崎大学大学院 工学研究科 電気・情報科学分野 准教授 阿部 貴志 講義概要 パワ エレクトロニクスの概要 パワーエレクトロニクスの概要 直流-直流変換技術と直流電動機への応用 直流 直流変換技術と直流電動機への応用 降圧形,昇圧形,双方向チョッパの原理 直流電動機の原理 直流ドライブシステムと制御 直流-交流変換技術と交流電動機への応用 単相 三相インバータ PWM制御法の原理 単相,三相インバータ,PWM制御法の原理 永久磁石形同期電動機の原理 交流ドライブシステムと制御 見本 見本 パワエレの基礎 ワ の基礎 スイッチングデバイス(IGBT) nチャネル形IGBT 等価回路 構造概略図 ・ バイポーラトランジスタとMOSFETを1チップ上に複合した素子。 ・ nチャネル形において,コレクタに正,エミッタに負の電圧を与え, ゲ トに ミ タに対して正電圧を加えるとオ ゲートにエミッタに対して正電圧を加えるとオン, 負(または0)電圧を加えるとオフ。オン時にコレクタ→エミッタと電流が流れる。 ・ 電圧制御形であり,駆動電力が小さい。 ・ MOSFETと同様に,高速スイッチングが可能。 ・ トランジスタと同様に,オン抵抗が小さく,低損失,大容量。 見本 降圧チョッ の基礎 降圧チョッパの基礎 インダクタは電流の変化に対し,起電力 を生じ,電流の変化を妨げようとする。 IGBT : オン 電流は増加し,それを妨げようとイン ダクタに起電力が生じる。この時,以 下のようになる。 io = is, Ed = eL + eo 誘導性負荷 降圧チョッ の基礎 降圧チョッパの基礎 IGBT : オフ 電流は減少し,インダクタに起電力が生じ, 電流は減少し インダクタに起電力が生じ 電流を保持しようとするが,上図では電流 の経路が無い。そこでダイオードを挿入。 io = iD, 0 = eL + eo 見本 誘導性負荷 降圧チョッ 降圧チョッパ 見本 実際に使用される回路(出力にコンデンサ) 十分に大きな C を挿入すると, を挿入すると LPFとして作用し,出力電圧 eo は 常に一定値 常に 定値 Eo=DEd となる。 となる また,出力電流は iR = Eo / R となる。 R = 5 L = 20H, C = 100F Ed = 10V, T = 10s, D = 0.75 Eo = 7.5V, iR = 1.5A, iL = 0.9375A 昇圧チョッ 昇圧チョッパ 見本 昇圧チョッパの実用回路 昇圧形コンバータとも呼ばれ, 昇圧形コンバ タとも呼ばれ 入力より高い出力電圧が得られる。 十分に大きなCを挿入しており, 出力電圧eoは常に一定値Eoとなる。 R = 10 L = 125H, C = 470F Ed = 24V, T = 10s, D = 0.6 双方向チョッ 双方向チョッパ 見本 A→B 降圧チョッパ Aに電源,Bに負荷を接続。 S2には常にオフ信号を与え,S1に対して スイッチング信号を供給する。 S1に対するスイッチング信号のデューティ比 により出力電圧が決まる。 L = 125H, C1 = 470F, C2 = 100F R = 10 , Ed = 60V, 60V T = 10s, 10 D = 0.4 04 Eo = 24V, io = 2.4A, iL = 1.152A B→A 昇圧チョッパ Aに負荷,Bに電源を接続。 S1に常にオフ信号を与え,S2に対して スイッチング信号を供給する スイッチング信号を供給する。 S2に対するスイッチング信号のデューティ比 により出力電圧が決まる。 L = 125H, 12 C1 = 470F, 4 0 C2 = 100F 100 R = 10 , Ed = 24V, T = 10s, D = 0.6 Eo = 60V, Io = 6A, IL = 15A , iL = 1.152A 直流電動機の原理 Ia 他励式を例に 界磁鉄心 回転速度 界磁巻線 m 見本 電機子電流 電機子鉄心 電機 鉄心 電機子巻線 電源電流 I 界磁電流 If Vf V 電源電圧 電源電 界磁電圧 発生トルク T = KaIa = Kt Ia 誘導起電力 E0 = Kam = Ke n dI a 電圧方程式 V Ra I a La E0 dt d m TL 運動方程式 T J dt ここで,Ka = pNa = pZ / 2a , Kt = 2Ke / 60 ,p:極対数,Na:電機子 有効巻数 Z 電機子全導体数 並 有効巻数,Z:電機子全導体数,a:並 列回路数,n:毎分の回転数[rpm], m :回転角速度[rad/s] ,:1極有効 磁束 磁束[wb],R 電機子抵抗 a:電機 電機 a:電機子抵抗,L 子巻線インダクタンス,TL:負荷トルク, J:慣性モーメント 直流ドライブシ テ 直流ドライブシステム 見本 降圧チョッパ+直流電動機 等価回路 電動機の時定数 La / Ra が十分に大きく, 周期 T も早く,電流が連続とする。 も早く 電流が連続とする 発生トルク T = KaIa = Kt Ia ダイオード両端電圧の平均値は, 誘導起電力 E0 = Kam = Ke n 1 T ED eD dt T 0 dI a 電圧方程式 DEd Ra I a La E0 Ton 1 T Ed dt Ed DEd dt T 0 T Ra 回転角速度 DEd T m 2 L これを電動機への入力電圧とする。 on K aΦ ( K aΦ ) 見本 直流ドライブシ テ 直流ドライブシステム 第2象限までの運転範囲拡大 双方向チョッパの利用 第1象限運転 1 S2に常にオフ信号を与え,S に常にオフ信号を与え S1に対して Ed スイッチング信号を供給する。 S1に対するスイッチング信号のデューティ比 により出力電圧 が決まる により出力電圧Vが決まる。 ia > 0, V > E0 > 0 第2象限運転 S1に常にオフ信号を与え,S に常にオフ信号を与え S2に対して スイッチング信号を供給する。 S2に対するスイッチング信号のデューティ比 により電源 Ed への回生割合が決まる。 の回生割合が決まる ia < 0, E0 > V > 0 1 ia m 2 DCM 2 V E0 イン インバータの基礎 タの基礎 t0 ~ t1:S1とS4をオン, S2とS3をオフ 負荷 負荷Rに正の電源電圧 電 電 Ed ac 1 見本 2 eac d 3 4 t1 ~ t2:S2とS3をオン, をオン S1とS4をオフ 負荷Rに負の電源電圧 -Ed 単相電圧形方形波イン 単相電圧形方形波インバータ タ 見本 出力電圧実効値 2Ta 1 2 ( ) ( 1 ) Veff f t dt E d T 出力電圧 基本波実効値 T 2 2 V1 E d cos( a ) T R = 2 L = 8mH, 8mH = 4ms, Ed = 50V, T = 10ms , Ta = 2/5 三相電圧形方形波インバータ 相電圧形方形波イン タ 180度通電方形波方式 基本構成のレグを3つ並列に 接続し 3相構成とする 接続し,3相構成とする。 各スイッチを180度期間オンし, 各相は120度ずらして点弧する。 平衡三相負荷が接続。 R = 2 L = 2mH, = 1ms Ed = 50V, T = 10ms 見本 三相電圧形正弦波インバータ 相電圧形正弦波イン タ 見本 指令電圧:実効値Vs = 30V,周波数 fs =100Hz u相指令 = 2 Vs /Ed sint, v相指令 = 2 Vs /Ed sin((t – 2/3), ), w相指令 = 2 Vs /Ed sin(t – 4/3), 搬送波:振幅:1, 周波数 fc =900Hz, 入力Ed = 50V 永久磁石形同期電動機 見本 交流電動機には,誘導電動機と同期電動機があるが,高効率, 小型 軽量 制御性能などの理由で 永久磁石形同期電動機が 小型・軽量,制御性能などの理由で,永久磁石形同期電動機が, 家電用,工作機器,ロボット,鉄道車両に多く利用され,最近は, 自動車用の主機として応用されて る。 自動車用の主機として応用されている。 永久磁石形同期電動機の構造 1) 電機子 2/3の位相差を持つ三相固定子電 機子巻線 平衡三相電機子電流を流 機子巻線。平衡三相電機子電流を流 し,図のように,各相巻線軸を定義。 2) 界磁 永久磁石を持つ回転子。円周方向 の磁束密度を正弦波状に工夫。N極 の向きをd軸,回転方向90度先をq軸。
© Copyright 2026 Paperzz