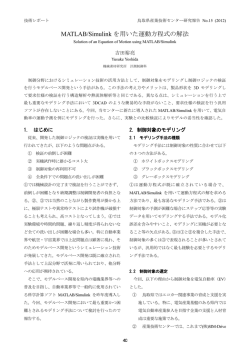
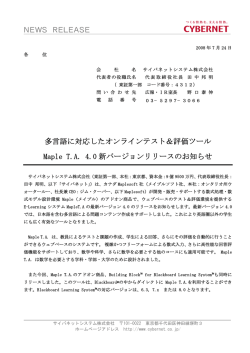
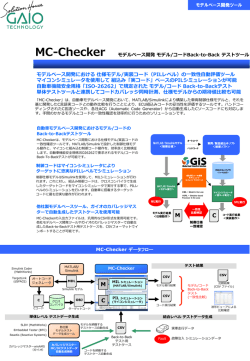
サイバネットニュース NEWS 2009 SPRING 特 集 MATLABを活かした技術開発 数値解析を見直してみよう! 解説「スライディングモード制御」 第1回 CAE ユニバーシティ 特別講座 ハードディスク装置のナノスケールサーボ制御技術と HDD ベンチマーク問題 129 No. CYBERNET NEWS No.129 spring 2009 ご挨拶 代表取締役社長 田中 邦明 既に読者の皆様にはご案内差し上げております通り、当社 モデル生成ツール、状態遷移表作成ツール、回路モデルとの連 は今年の 6 月末を持ちまして MATLAB の販売を取り止めま 携ツール、またハードウェアではラピッドプロトタイプシス す。1988 年の販売以来 21 年に渡り販売及び技術サポートを テム、HILS(Hardware In the Loop System)なども扱って 続けて参りました。そして産業界のみならず教育機関、研究機 おります。また、将来的には MBD(モデルベース開発)にお 関において多数のエンジニア、研究者のご支持をいただき広 ける“ツールチェーン”の形成及びトータルソリューションの く活用されるに至りました。特に制御系設計におきましては、 提供ができる企業を目指し、各製品の開発元との連携を深め その設計手法の主流となっております MBD(モデルベース て参ります。 開発)の中心的なツールとして位置付けられるまでになりま 詳細につきましは以下の URL をご参照ください。 した。これも一重に MATLAB をこよなく愛し続け、時には厳 http://www.cybernet.co.jp/matlab-thirdparty/ しいご指導・ご指摘をいただきましたユーザの方々のご支援 また MATLAB による受託解析・開発・検証及びコンサル の賜物であると存じます。 ティングにおきましては特に自動車業界、通信業界を中心に 改めまして長年に渡り MATLAB をご利用いただきました MATLAB の技術サポートに携わってきた経験豊富な人材を ユーザの方々へお礼を申し上げます。 配置し、プロフェッショナルなサービスを展開して参ります。 さて、当社は MATLAB の販売を終了いたしますが、今後 最後になりますが、 これまで 「MATLAB といえばサイバネッ はこの 21 年間に培って参りました MATLAB に関するノウ ト」と言われる程、 お客様にご支持をいただいておりましたが、 ハウをベースとして、MATLAB 関連製品の販売・サポート、 今後は「MBD(モデルベース開発)といえばサイバネット」 、 MATLAB による受託解析・開発・検証及びコンサルティン 更には「CAE といえばサイバネット」と言われるよう、全力を グ等幅広いエンジニアリングサービスの提供を計画しており あげて取り組んで参ります。 ます。 これからもお客様の声に応え続ける、お客様の求めるサー 現在 MATLAB 関連製品は、10 社の開発元と代理店契約を ビスを提供し続ける会社でありたいと思っております。引き しております。制御設計における物理モデル構築ツール、数式 続きご支援の程、よろしくお願い申し上げます。 Contents ご挨拶 14 2 ◆代表取締役社長 田中 3 ◆執行役員 CAE ユニバーシティ 特別講座 CTO 石塚 真一 ◆ MATLAB 第3章:スライディングモード制御の応用例 邦明 16 ニュース 4 ◆解説「スライディングモード制御」 ユーザをサポートする当社の取り組みについて 6 その 1:スティフ 8 ◆数値解析を見直してみよう! その 2:微分代数方程式 HDD ベンチマーク問題 新製品情報 特集 MATLAB を活かした技術開発 ◆数値解析を見直してみよう! ◆ハードディスク装置のナノスケールサーボ制御技術と ◆3 18 次元ダイレクトモデラー「SpaceClaim Engineer 2009」 ◆解析データ管理ツール 「ANSYS Engineering Knowledge Manager」 10 12 2 ◆ PCB ◆解説「スライディングモード制御」 第1章:スライディングモードとその特徴 ◆解説「スライディングモード制御」 第 2 章:スライディングモード制御の設計 19 ドキュメント自動生成システム「BluePrint-PCB」 ◆マニュアル自動作成ツール「epiplex Documentor」 ◆ファイルサーバアクセスログ収集ツール 「Ci-Audit for File Server(CiA) 」 CYBERNET NEWS No.129 spring 2009 では、モデルとは?大規模シミュレーションの代表である 航空機の流体解析エンジニアにとっては、3D CAD を基にし た、1,000 万要素を遙かに超えるような本物そっくりにメッ シングされた CG のようなモデルをイメージするかも知れま せん。制御エンジニアの方の中には、 具体的に Simulink の 執行役員 CTO 石塚 真一 ブロック線図モデルを思い浮かべる方も多いでしょう。もち ろんどれも間違っていません。しかしここで私が強く意識し 科学技術立国“日本”復活の一助に! たいのは、図 1 に示すようにモデルは「理論と技術を結ぶイン CAE/ シミュレーション技術は、日頃よりサイバネットプロ ターフェイス」であるということです。これは、制御理論でご ダクトをご愛用いただいている皆様の並々ならぬ熱意に支え 活躍された元東京大学の木村英紀先生がおっしゃられた言葉 られ、産業界における開発期間の短縮や性能向上に寄与して であり、講演、および著書でこの話に触れた際、まさにこれが 参りました。皆様の努力の賜物である、このような豊かな社会 CAE/ シミュレーションの成否を決定するものであり、自分た に生活できることに心より感謝しております。 ちが届けたい、と強く思いました。これも木村先生の言葉から CAE/ シミュレーションツールがなしてきた役割を別の側 の抜粋ではございますが、本来、理論と技術は図 2 に示すよう 面から見ると、 「技術の均質化」が挙げられると思います。こ に、互いに対極に位置し、相容れないものですが、モデルを介 れは良い面と悪い面を兼ね備えていると考えます。例えば今 すことにより、個々の技術の世界を理論という普遍的な世界 から約 30 年前に発表された H∞ 制御は、その理論の難解さと で論じることができ、シミュレーション可能になり、その結果 計算の複雑さのため、大学を中心とする一部の研究者にしか は再びモデルを解して現実の技術の世界に還元できる、とい 使うことができませんでした。それが MATLAB の登場により うことです。そのモデルは適用分野に応じて変える必要があ 急速に普及し、多くの方が利用可能となり、その有効性が研究・ ります。先の流体解析では大規模なメッシュモデルかも知れ 検証され、現在では量産製品にも利用されております。 ませんし、制御設計の世界で使われるモデルは通常、微分方程 技術の均質化は、良い言い方をすれば技術の底上げとも言 式系で表現されますが、その次数はせいぜい数十程度です。こ えるので決して悪いことではありません。しかし、今後は底上 のように、問題に合わせた適切なモデルを提案できるように げされた分、他と差別化する、より高度な、より独自性のある、 なることが、当社の非常に重要な使命だと考えます。 社会になじむ技術が望まれ、それが、最近やや陰を落としたと 言われる科学技術立国“日本”復活に必要なことであり、私た 逆引きされる会社「制御といえばサイバネット」 ちサイバネットも、その一助を担いたいと考えています。もち 最近は多くの分野で「MBD:モデルベース開発」といった ろん私たちは直接、ものをつくることができませんので、お客 言葉が聞かれるようになってきました。すでにお話ししたよ 様と共に問題を考えていくことになりますが、その意識が真 うに、現実の世界(技術)と抽象的な世界(理論)を結び付ける の意味での当社のコーポレートメッセージである「つくる情熱 のがモデルであるわけですから、CAE/ シミュレーションそ を、支える情熱。 」であると考えます。 のものが、全てモデルベース開発と言える訳です。実際、図 1 に示す工学分野以外にも、社会科学、自然科学の分野において いまさらながら“モデル” も、モデルは利用されている訳です。しかし産業界で、モデル それでは具体的にそれをどのように実現するか?ですが、 ベース開発を強く意識するようになったのは、制御系設計の それは「適切なモデルを提案する」ということになります。現 「モデルに基づくコントローラ設計」が起点になっていると思 在、様々な分野で CAE/ シミュレーションが使われています います。当社では、長年の MATLAB のビジネス経験を生かし が、その成否の鍵は「モデル」に集約されると考えます。 て、 「制御といえばサイバネット」と言われることを目指して、 当たり前と思われるかも知れませんが、私は今更ながらモ 今期新たに「モデルベース開発推進室」を設置しました。ここ デルを考え直す必要があると思っています。それは、長年の研 では図 3 に示すように、 「理論」 、 「ツールの使い方」 、 「技術」の 究とコンピュータ技術の進歩により、ソルバーが強力になり モデルベース開発の 3 要素に重点を置いています。そしてこ (あまりモデルを考えなくても良い) 、ソルバーへの入力(いわ の考えを様々な分野に展開し、 「○×といえばサイバネット」 ゆるモデル化)がオペレーションレベルで可能になっている と言われるように、CAE/ シミュレーションの世界で逆引き からです(もちろん、全てではありませんが) 。 される会社になるよう邁進して行きたいと思います。 理論と技術を結ぶインターフェイス! 理論 建築 / 構造物 光学 / 精密機器 モデル モデル モデル 自動車 / 輸送機器 理論 モデル 電子 / モデル ディジタル 航空 / 宇宙 モデル 信号処理 電気 / アナログ 高周波 図 1 モデルの役割 技術 抽象的 具体的 (分かりにくい) (分かりやすい) 普遍的 個別的 (何にでも適用できる) (特定のものしか当てはまらない) 論理的 経験的 (誰でも理解できる) (特定の人しか理解できない) 数理的 物理的 (頭の中の世界) (現実の世界) 数学 / 物理 / 工学(理論) ・顧客満足度の 高いサポート ・コンサル タント ツール (How to Use) 対象 (技術) 理論と技術は互いに対極に位置する 図 2 理論と技術 図 3 モデルベース開発の 3 要素 3 CYBERNET NEWS No.129 spring 2009 ニュース MATLAB ユーザをサポートする当社の取り組みについて サイバネットでは、20 年以上にわたる MATLAB の取り扱 「CAE リーディングカンパニーならではのサービス」 いを通じて、お客様の課題と向き合い、活用のご支援を行って さらに、当社は MATLAB の解析機能を広げる関連製品、機 まいりました。その過程でお客様がどのようなことにお困り 械系や電気系など各分野の有力 CAE ツールを取り扱ってお なのか、またどのような関連ツールを必要とされているのか り、非常に広範囲な分野において専門的で高い技術力を有し を常に意識し、当社にできることを模索してまいりました。そ ています。MATLAB と他の解析ツールを複合的に連成した解 の結果、サイバネットは MATLAB ユーザの皆様を多角的に 析など、より高度なサービスもご相談ください。 サポートする体制を整えることができました。今回は、下記 3 つのサポート内容を今後の展開も含めご紹介致します。 ① MATLAB の利用を支援するエンジニアリング(受託)サー ビス ② MATLAB を活用するために必要な基礎知識(各種理論)の 教育プログラム ③ MATLAB の利用範囲、利便性を拡大する関連製品のご提供 MATLAB USER MATLAB USER MATLAB USER CYBERNET CYBERNE ①エンジニアリングサービス 図 2 エンジニアリングサービスのフィールド ②理論教育 ③関連ツール提供 図 1 サイバネットのユーザサポート MATLABを活用するために必要な基礎知識(各種理論) の教育プログラム「CAEユニバーシティ」 CAE ユニバーシティとは、 「CAE ツールを有効活用するた サイバネットだからこその 「エンジニアリングサービス」 めに、実務を意識した理論の習得が必要だ」というお客様の声 サイバネットでは、お客様からの MATLAB に関わる受託業 野 17 講座あり、制御や信号処理といった MATLAB ユーザの 務のご要望にお応えするべく、2007 年 4 月にエンジニアリン 方の業務に直結する講座も充実しています。 グサービス室を設け、MATLAB を利用した受託開発、受託解 今年の夏からは、新たに「制御モデリング講座」を開講する 析のサービスを開始しました。特定分野に限定されない「サイ など、お客様のニーズを受けてカリキュラムの充実を図って バネットにしか出来ない」 「サイバネットだからこそ」の多様 まいりますので、皆様のスキルアップに是非ご活用ください。 から生まれた教育プログラムです。現在、実習も含めると 6 分 な受託サービスを今後もご提供してまいります。 ■ 講座概要 「信頼の実績と技術力」 当社は 1988 年の MATLAB の販売開始以来、日本における ・CAE のための基礎数学 for 制御 開発支援を支えてまいりました。その販売実績とともに技術 数値解析と制御を理解するための数学の講義です。 サポートで蓄積してきた技術力をベースにエンジニアリング MATLAB を用いた数値解析の解説も行います。 サービスを提供いたします。 「広範囲なサービスの提供」 MATLAB は汎用データ解析、シミュレーションツールとし て非常に広範囲な機能を提供しています。サイバネットでは、 ・制御講座 テキストには MATLAB で作成したモデルのアウトプット を使い、分かりやすく説明しています。 ・制御モデリング講座 制御系設計や通信、信号処理分野といった MATLAB のベース 2009 年からの新講座です。講師は東京大学准教授の中野 となる分野だけでなく、画像処理やデータ解析、最適化、シス 公彦先生にご担当いただきます。どうぞご期待ください。 テム構築、コード生成補助、コンサルテーションなどさまざま 4 <制御分野> ・制御実習 なニーズに応えるサービスが提供可能です。お問い合わせい 株式会社 ZMP に協力いただき、実験、シミュレーション ただいたご要望をもとに、熟練したスタッフがソリューショ を通じて制御工学の理解を目指します。シミュレーション ンをご提案します。 では MATLAB/Simulink を利用いたします。 CYBERNET NEWS No.129 spring 2009 <デジタル信号処理分野> ■ 当社取り扱いの関連製品 ・CAE のための基礎数学 for 信号 ・複合領域モデリング環境「MapleSim」 数値解析とデジタル処理信号を理解するための数学を講 ・数式処理/数式モデル設計環境「Maple」 義です。MATLAB を用いた数値解析の解説も行います。 ・自動制御設計支援ツール「ExpertControl」 ・デジタル信号処理講座 ・有限要素法解析、振動解析 ツール MATLAB を用いたデモも行い、判りやすく信号処理の理 論を学ぶ講座です。 (下図はテキスト掲載の MATLAB 上 での LMS アルゴリズム収束例) 「Structural Dynamics Toolbox/FEM Link」 ・MATLAB/Simulink ベース 燃料電池システムライブラリ 「FClib」 ・Simulink を用いた実機検証環境 「Real-time target machine シリーズ」 ・信号処理アルゴリズム開発環境「SignalMaster」 ・PSpice と MATLAB/Simulink のインターフェースツール 「PSpice SLPS Interface」 当社の MATLAB 関連情報サイト 「MATLAB Library」 ・デジタル信号処理実習 株式会社 ZMP のご協力による、MATLAB/Simulink を用 サイバネットでは、当社がご提供している製品、サービスの いたデジタル信号処理技術を理解する実習です。 中から MATLAB ユーザの皆様にお役に立つ内容をまとめた 「MATLAB Library」をご用意しました。 MATLAB の利用範囲、利便性を拡大する関連製品 今回、この場でご紹介した内容の詳細も同サイトからご覧 サイバネットは MATLAB をより広い分野に、より便利に利 いただけます。また、今後も関連製品、サービスの充実を図っ 用するための関連製品を世界各国に求め、日本の皆様にご紹 てまいりますので、最新情報はこちらでご確認ください。 介してまいりました。そして、今後は皆様が特に注目されてい るモデルベース開発※の推進に重点を置き、取り扱い製品の拡 ■ MATLAB Library http://www.cybernet.co.jp/m-library 充とサポート向上を進めてまいります。 ※モデルベース開発:Model-Based Development 数理(数式)モデルに基づき理論的解析・検証を行いながら進 める開発プロセス。数理(数式)モデルを仕様の「正」とすること で実験・実装からの手戻りを削減。 広義制御設計 Step 0: 新製品の構想・企画 Step 1: 制御対象(プラント)のモデル導出 支配方程式からの導出 ツールの利用 実験による導出 (運動方程式、回路方程式、etc) (構造、 機構、 電子回路、 etc) (システム同定、 モード解析、etc) Step 2: 補償器設計 (狭義制御設計) Step 3: シミュレーション 組込みソフト開発 今後も皆様をご支援してまいります 以上、サイバネットが MATLAB ユーザの皆様にご提供して Step 4: 実装・実験 いる多様な製品、サービスと今後の展開についてご紹介いた しました。 図 3 モデルベース開発のプロセスと当社取り扱い製品例 当社は他社に真似の出来ない安定的で先進的なサポートに より、皆様をご支援してまいりますので、引き続き MATLAB の活用などに関するお悩みはサイバネットへお気軽にご相談 ください。 お問い合わせは 事業企画管理室 TEL 03-5297-3608 E-mail [email protected] 5 CYBERNET NEWS No.129 spring 2009 特集 数値解析を見直してみよう! その 1:スティフ 特集:MATLAB を活かした技術開発 はじめに ● 系の減衰に大きな差がある場合 私たちはシミュレーションにおいて、様々な場面で数値解析 の恩恵を受けています。長年の研究成果と技術競争により、商 用化されたツールは普段はその計算の仕組みを意識しなくて も、 “かなり”精度の高い答えを出してくれます。また数値計算 の利点として、入力さえ間違えなければ「基本的には何がしか の答え」を出してくれます。しかしながら、それ故「本当に合っ ているのか?」という視点を持つことが重要なのも事実です。 数値計算の中身を一つ一つ追うのは非常にタフな作業で非現実 的ですが、その性質を理解するだけでも数値解析をより身近に 感じ、これまで以上にうまく付き合うことができると思います。 ここではそのような観点から中身が陽に分かっている問題 具体的な問題としては: ● 機械系と電気系など時定数が大きく異なる系が混在する モータのようなメカトロニクス ● 金属とゴムなどの剛性の大きく異なる複合材料 などが挙げられます。 テストケース 1. テストモデル 図 1 のような固有振動数を任意に変えることができる 2 自 由度振動系を考えます。原点からの距離の差は約 660 倍と なってます。 に対して、数値解析の性質を2回に分けて見直してみようと思 います。話を具体的にするため、ユーザが自由に問題設定でき る数値解析ツールの代表としてMATLABを数式処理(厳密解) ツールとしてMapleを用いますが、両者のツールの優劣を付 けるのではなく数値解析の性質を再考し、より有効に使いこな すことが目的であることを、改めて付記させていただきます。 スティフな系 微分方程式を数値解析で解く場合、いわゆる“スティフな系” と呼ばれる問題に出くわすことがあります。解の安定性やシ ミュレーション速度に注意が必要と言われていますが、この 性質を明らかにします。 スティフな系とは、微分方程式を陽解法で解く場合に重要 な概念となります。定義 1 に陽解法の定義を、定義 2 にスティ フな系の定義を記します。 図 1 スティフな系のテストモデル 2. 数値解析:固定刻みソルバ 図 1 のモデルを Simulink でモデル化すると、図 2 のように なります。各質点に適当な初期変位を与え、代表的な陽解法で ある Runge-Kutta 系列のソルバ Dormand-Prince 法で、刻み 幅変えてシミュレーションした場合の質点 1、2 の変位を図 3 *時間軸シュミレータでは、現時点の情報から未来を計算できる陽解法の方が 都合がよいが、安定性を保証できず刻み幅の設定が重要となる。 定義 1 陽解法と陰解法 定義 2 スティフな系 陽解法は現在と過去の結果から未来の挙動を計算できるた め、時間軸シミュレータでは都合の良い方法です。 反面、たとえ系が安定であってもシミュレーションの安定 性を保証できず、精度上必要な計算刻みより遙かに小さい刻 図 2 2 自由度振動系の Simulink モデル みが必要とされる場合があり、これを“スティフな系”と呼ぶ というのが定義 1、2 の言っているところです。 スティフの概念は非線形システムにも適用できますが、線 形システムでは系の固有値で決定され、固有値の原点からの 距離が大きく離れている場合に相当します。 物理的には: ● 系の固有振動数に大きな差がある場合 6 図3 Dormand-Prince法(陽解法)による固定刻みシミュレーション CYBERNET NEWS No.129 spring 2009 に示します。この系は本来物理的に安定であることは自明で すが、刻み幅が大きくなると解が発散することが分かります。 3. 数値解析:可変刻みソルバ 刻みを調整しながらシミュレーションする可変刻みソルバ には、 スティフな系に対応したものがあります。これは、 スティ フな系では一般にシミュレーションが極端に遅くなることを 改善したものです。しかし、安易に用いて良いものか?につい て考察します。 図 4 の c ) 、d ) はスティフな系に対応したソルバです。ソル 図 6 MapleSim による物理モデリング バにより大きく結果が異なることが分かります。後に説明し ますが、この場合 ode45 が一番精度良い結果を示しています。 この結果から分かるように、スティフなソルバあるいは次数 の低いソルバでは、高周波の減衰が高めに見積もられた結果 図 7 自動生成したシステム方程式 となります。多くの物理系、工学問題では「固有振動数が高い ほど減衰しやすい」ことが多いのでスティフなソルバは有効に テムであるため、Maple の数式処理機能を用いて厳密解を求 機能しますが、本系のように高次の減衰が小さい場合は注意 めることができます。 を要することが分かります。 さらに Maple では厳密解を数値化する際、任意の桁数で 計算できます。ここではハードウェアの倍精度浮動小数点精 図 8 厳密解と数値解の比較 度(10 進換算で約 15 桁)を超える 20 桁で数値化した結果と 図 4 可変刻みシミュレーション(スティフソルバの比較) Simulink の数値解析結果を比較したものを図 8 に示します。 4. 数式処理:厳密解 Maple の結果は厳密解を高精度に数値化しており、ほぼ真 数式処理ツール Maple と、その上で動作する次世代物理モ の解と考えることができるため、ここではこれを厳密解とし デラ MapleSim を用いて、本問題に対する真の解を探ります。 ます。これより Simulink の ode45 はわずかに高周波数で減 Maple/MapleSim によるシミュレーションの流れを図 5 に示 衰するものの、他のソルバと比較(図 4)し大変良好な結果を します。 示していることが分かります。 考 察 以上の結果より以下のことが言えます。 1)スティフな系において固定刻みソルバは解の安定性を左右 するため、刻み幅を慎重に選択する必要があります。 2)可変刻みソルバではトレランスにより刻みはコントロール できるので固定刻みより有効と考えられるが、ソルバによ り解が異なるので注意が必要です。 3)スティフなソルバは高周波の減衰が高めに見積もられるの で、減衰が少ない系に対しては適しません。 4)複雑な系に数値解析を適用するとソルバの性質がわかりに くくなってしまうので、モデルが陽に分かっているシンプ 図 5 Maple/MapleSim によるシミュレーション ルな系に対して厳密解と比較することによりソルバの性質 図 6 に MapleSim で作成した物理モデルを、図 7 にそこか を知ることは、数値解析をより有効に利用するために重要 ら自動生成したシステム方程式を示します。これは線形シス であると考えられます。 お問い合わせは アドバンスドソリューション統括部 モデルベース開発推進室 TEL 03-5297-3255 E-mail [email protected] 7 CYBERNET NEWS No.129 spring 2009 特集 数値解析を見直してみよう! その 2:微分代数方程式 特集:MATLAB を活かした技術開発 1 はじめに ここで、 INDEX(指数)という概念を導入します。INDEX は、 ダイナミックシステムの問題を考えるとき、しばしば“微分 DAE と ODE の間のメトリック(距離の概念:どれくらい離れ 代数方程式(Differential Algebraic Equation: 以下 DAE) ” ているか)で、以下のように定義されます。 と呼ばれる問題に遭遇します。DAE は機構解析など、一部の 分野を除いてはあまり意識されませんでしたが、ダイナミク 一般の多次元 DAE(2) に対して INDEX は、ẏ を y と t に スを表す微分方程式と、動きに拘束を与える代数方程式を同 ついて解くときに(すなわち、ẏ に対する常微分方程式を 時に満足する方程式のことで、図 1 に示すように、機構系以外 定義るすために)必要な、最小の微分回数 p のことである。 にも、流体系、電気系など多くのシステムに自然に存在します。 F (t,y,y ) =0 dF (t,y,y ,y ) =0 dt 図 1 スライダークランク機構では、各リンクは力を受けて運 … 動(ダイナミクス)しますが、各リンクはそれぞれ独立に動く ことはできず、ピン結合により互いの節点を共有しているの (4) d pF (t,y,y ,...,y ( p+1)) =0 dt で、位置が等しい(拘束)必要があります。サーボ弁では、シン ダーの圧力差によりピストンが動き(ダイナミクス)ますが、 シリンダに流入する流体と流出する流体の量(質量)は等しく なる(拘束)必要があります。電気回路でも同様なことが言え ここで、簡単な例により INDEX の概念を具体的に示します。 ます。 (5) 式の DAE(常微分方程式と代数方程式の連立)を考えます。 y1= q ( t ) y2 = y1 このように多くのシステムは、某かの拘束の下に動いてお り、多くの場合は DAE 問題となります。しかしこの DAE 問題 は、数値シミュレーションにおいて注意すべき側面を持って います。ここでは、普段はシミュレーションツールが自動的 に計算している DAE 問題についてもう少し掘り下げるととも (5) y2 に対する陽的形式を得るために、(6) 式のように q(t) を 2 回微分する必要があるので、INDEX は 2 となります。 y2 = y1 = q ( t ) に、数値シミュレーション上の留意点を簡単なベンチマーク で示し、理解を深めます。 (6) 従って、通常の ODE の INDEX は 0 となります。 2 DAE とは? 良く知られた多次元の常微分方程式(Ordinary Differential Equation: 以下 ODE)は、(1) 式のような陽的多次元形式で表 現できます。 3 INDEX リダクション INDEX が 2 以上の DAE を高 INDEX DAE と呼びます。数値 シミュレーションを用いる場合は、INDEX が 0 もしくは 1 ま y =f ( y,t ) (1) で低くすることが望まれます。これは ODE ソルバで高速に解 いたり、あるいは DASSL に代表される多くの DAE ソルバは これは、Runge-Kutta などの陽的解法(現在の値から次の INDEX 1 に対応しており、これを利用して正確にシミュレー ステップの値を逐次的に求める)で容易に答えを得ることがで ションできるからです。これについては次の節で紹介すると きます。これに対し DAE 問題は、一般的に (2) 式のような陰的 して、ここでは高 INDEX DAE を低 INDEX DAE に置き換え 多次元形式で表現されます。 る、 「INDEX リダクション」というテクニックを紹介します。 F ( t ,y,y ) = 0 (2) これは特別な場合、(3) 式のように書き直すことができます。 x =f (t,x,z) 0 = g (t,x,z) 図 2 に示す振り子を用いて、INDEX リダクションのしくみを 説明します。 Lagrange 乗数λを使って直交座標系で Newton の方程式 を立てると (7) 式となります。 (3) これは、半陽的多次元形式または、制約のある ODE と呼ば れます スライダークランク機構 サーボ弁 図 1 実世界の DAE の例 8 電気回路 CYBERNET NEWS No.129 spring 2009 ンし、高精度にシミュレーションします。なお、MapleSim の 詳細についてはここでは触れませんので、以下の URL を参照 下さい。 http://www.cybernet.co.jp/ad/maplesim/ MapleSim で自動実行 MapleSim による 物理モデリング MapleSim でシステム方程式の 自動生成 DAE を直接記述 簡単化 /INDEX リダクションで INDEX 1 DAE 化 ※質量を無視できる長さ 1 の剛体の棒に大きさを 無視できる質量 1 の質点が付いた振り子。 Maple に DAE を定義 図 2 振り子 INDEX 1 DAE ソルバ x1 = x3 x2 = x4 x3 =−λx1 x4 =−λx2−g (7a) x12+x22 =1 (7b) 図3 Maple/MapleSimによるDAE問題のシミュレーション手順 4 ベンチマーク:DAE vs ODE 多くの場合、図 2 に示す振り子は (9) 式のような極座標系で (7b) 式を微分し、(7a) 式を代入すると以下の式を得ます。 回転の運動方程式を立てて、ODE 問題として解かれます。 2x1 x1 = 2x2 x2 = 0 2x1 x3 = 2x2 x4 = 0 ml 2 =−mg sinθ さらに微分(2 回目)し、(7a) 式を代入すると以下の式を 得ます。 (9) しかしこの場合、リンクの長さによる拘束を陽に解いてい ない(回転系の積分演算だけで解く)ため、シミュレーション 時間が長くなると積分誤差が累積し、リンクの長さが変わっ 2 ( x1 x3+x1 x3)+2 ( x2 x4+x2 x4) =0 ( x32+x42 )−λ( x12+x22 )−gx2=0 たように計算されるなど、物理的に矛盾のある結果を導く可 能性があります。 さらに微分(3 回目)し、(7a) 式を代入すると以下の式を得 (9) 式を Simulink で ODE 問題としてモデル化した場合と、 図 2 を MapleSim でモデル化し、INDEX 1 DAE 問題として ます。 2x3 x3+2x4 x4−λ( 2x1 x1+2x2 x2 )−λ( x12+x22)−gx2 =0 λ=−4λ( x1 x3+x2 x4 )−3 gx4 モデル化した場合のシミュレーション結果を図 4 に示します。 3 回の微分後、拘束方程式 (7b) を陽的微分方程式に変更で ODE でも DAE でも大きな差は認められません。しかし、c), d) きました。よってこのシステムは INDEX 3 となります。これ は 0 ∼ 105 秒と長時間シミュレーションした場合の y 位置で より (7) 式は (8) 式の陽的多次元 ODE となります。 すが、ODE では振り子の角度が小さくなっていくのが確認さ x1 x2 d x dt x3 = 4 λ x3 x4 λx1 − λx2−g − −4λ( x1 x3+x2 x4 )−3 gx4 どちらも振り子の初期角度を水平位置とした場合の自由振動 です。a),b) は 0 ∼ 5 秒までの x 位置と y 位置を示しており、 れます。 このように、ODE ソルバでは拘束が陽に計算されないので、 (8) 累積積分誤差に注意を払う必要があります。 この例に示すように、INDEX リダクションは数式処理を伴 います。INDEX リダクションは人手で行ってもできなくはあ りませんが、非常に煩雑な数式処理が伴うため、ツールによる 自動化が望まれます。その代表が Maple/MapleSim で、これ により、数式処理 / 数値解析を融合したシミュレーションを簡 単に実施できます。図 3 に Maple/MapleSim を用いた DAE 問題のシミュレーション手順を示します。MapleSim では高 INDEX DAE 問題を自動的に INDEX 1 まで INDEX リダクショ お問い合わせは 図 4 ODE と DAE のシミュレーション結果 アドバンスドソリューション統括部 モデルベース開発推進室 TEL 03-5978-3255 E-mail [email protected] 9 CYBERNET NEWS No.129 spring 2009 特集 解説「スライディングモード制御」 第1章:スライディングモードとその特徴 特集:MATLAB を活かした技術開発 1.1 はじめに u(t)= 近年、スライディングモード制御は実用性の高い非線形制 御理論の一つとして認知されています。多くの理論的・応用 的な研究が行われており、産業応用もなされています。 { 2, s(t)>0 0, s(t)=0 2, s(t)<0 - (1-3) s(t)=-y(t)+y(t) スライディングモード制御の最大の特徴は、外乱やモデル 化誤差などの不確かさに対し、とても良好なロバスト(頑強) 性を有する制御系を構成できることです。特にスライディン グモード制御を用いてサーボ系を構成した場合には、良好な ロバスト性と、高い追従性を両立することが可能です。 (1-4) これは、図 1 − 3 の点線で入力を切り換えていることになりま す。こうすることで、原点が安定でない二つの系(図 1 − 2 の (a) と (b))がこの線を境に切り換わります。図 1 − 4 はそれぞ れの場合の y(質量の位置)の時間応答です。図 1 − 3 と図 1 − 4 から、原点は安定であり振動が時間とともに収束すること 本解説ではこのようなスライディングモード制御について、 が分かります。さらに図 1 − 3 の原点近傍には直線上を滑るよ Maple や MATLAB を用いた設計例や最近の産業応用的研究 うな軌道がありますが、これがスライディングモードとよば 事例を紹介します。まずこの第一章ではスライディングモー れる状態挙動です。また入力を切り換える線を切換超平面(こ ド制御とはどのようなものか簡単に説明します。なお、設計手 こでは切換線)といい、切換線を定義している式 (1-4) の s(t) 法は次章でも簡単に説明しますが、スライディングモード制 を切換関数とよびます。 御の基本的な設計手法は、ほぼ確立されていますので、文献 (1-1) ∼ (1-4) などもあわせてご参照ください。 y k u m まずは「スライディングモード」について説明します。 1.2 スライディングモードとは? 図 1 − 1 バネ - 質量系 「スライディングモード」とは可変構造系において発生する y 特殊な状態挙動です。可変構造系とはシステムの動特性が不 y 連続に切り換わる系です。例えばPIDコントローラの各ゲイン y y を必要に応じて切換えるような系も、可変構造系の1つです。 ここでは図 1 − 1 のようなバネ - 質量系を用いて簡単に示し ます。ただし質量 m と床面との間の摩擦は無視します。この系 は適当な初期値を与えると(引っ張って離せば) 、振動します。 (a) この振動を外部からの力入力 u(t) により止めることを考えま u=-2 (b) u=2 図 1 − 2 一定値入力に対する位相面軌道 す。入力まで含めた運動方程式は k =1、m=1 とすれば次式と ここを境に,図1−2(a)(b)が切り換わっている なります。 y y(t)=-y(t)+u(t) (1-1) 変位や速度に比例した線形制御入力を用いても、振動を止 y めることができますが、ここでは次のような2種類の一定値 入力を考えます。 u(t)=2, u(t)=-2 (1-2) それぞれの入力に対する系の挙動を調べるために、解軌道 スライディングモード とベクトル場を位相面上にプロットすると図 1 − 2 のように なります(数式処理ソフトウェア Maple を用いて作図してい 図 1 − 3 入力を切り替えたときの位相面軌道 ます。又、同図中の点線は後ほど説明する切換線です。 )振動が 4 止まるためには、位相面上で解軌道が原点へ収束しなければ なりませんが、どちらとも解軌道は円を描いています(一度揺 が釣り合う点を中心として、振動し続けることになります。 2 1 y れだすと止まらない) 。このとき一定値力入力とバネの弾性力 u=2 u=-2 u=式(3) 3 0 -1 -2 次に入力を次式のように切り換えてみます。 -3 -4 0 2 4 6 time 図 1 − 4 時間応答の比較 10 8 10 CYBERNET NEWS No.129 spring 2009 部のパラメータ変動・線形近似誤差などが含まれます (1-1) ∼ (1-4)。 1.3 スライディングモード制御 式 (1-3) の入力は符号関数 sgn を用いて次式で表せます。 さらなる特徴として、制御則を設計するときに不確かさの時 u(t)=-2sgn(s(t)) 間領域における最大値が既知であれば良いという点もありま (1-5) これを次式のように変えます(ゲインを大きくします) 。 u(t)=-10sgn(s(t)) す。例えば、前章の例では sin(ẏ(t)) ≦1ですが、任意の f(t) ll ll ll ll ≦ 1 を満たす外乱 f(t) に対して、同様の結果が得られます。 (1-6) 上述のように、比較的多くの不確かさをカバーしつつ、不確 このとき状態軌道は図 1 − 5(a) のようになり、一度状態が切 かさの取り扱いも容易な設計手法です。これが近年盛んに用 換線に到達するとすぐさまスライディングモードとなります。 いられる理由だと考えられます。 さらに式 (1-1) を次のように変えます。 y(t)=- y(t)+sin(y(t))+u(t) (1-7) このときの軌道は図 1 − 5(b) のようになります。sin(ẏ (t)) という項が加わったにも関わらず、ひとたびスライディング モードとなれば、直線状を原点に向かって進んでいます。つま り、sin(ẏ (t)) を不確かさと考えれば、スライディングモード では不確かさの影響を受けていないことになります。 1.5 切換入力の問題と対処 式 (1-6) の制御入力は、切換関数 s(t) の正負によって瞬時に 一定値入力を切り換えねばならず、現実的ではありません。ま た、これをそのまま実装すると、微小振幅の高周波振動(チャ タリング)が問題となる場合があります。このようなスライ ディングモード制御を実装する場合の問題に関して多くの対 処法が提案されていますが、符号関数を飽和関数などで近似 この特徴をうまく使えば、大変にロバストな制御系を構成す ることが出来そうです。そして実際に制御系設計に取り込み、 設計手法を確立したものがスライディングモード制御です。 する手法 (1-1) ∼ (1-4) が良く用いられます。 マッチング条件を満たす不確かさに関する非常に高いロバ スト性は、実は理想的な切換が成されたときの特徴です。上述 なお、図では判りにくいですが、スライディングモードにな のような対処を行うと、マッチング条件を満たす不確かさで るまでの軌道は sin(ẏ (t)) の影響を受けています。このスライ あっても影響を受けてしまいます。つまりチャタリングの低 ディングモードになるまでの軌道を「到達モード」とよびます。 減とロバスト性の間にはある種のトレードオフが存在します。 不確かさと求める性能、それにアクチュエータの性能を考慮 して適切に対処する必要があります。 1.4 スライディングモード制御の特徴 スライディングモード制御の特徴であるロバスト性につい て、次のことが知られています (1-1) ∼ (1-4)。 スライディングモードでは、マッチング条件を満たす「外乱・ プラントパラメータ変動・モデル化誤差などの不確かさ」の影 響を全く受けない。 1.6 おわりに 本章では、スライディングモード制御について簡単に紹介 しました。スライディングモード制御に関する一般的な参考 書としては文献 (1-1) ∼ (1-3) などがあります。切換超平面や 切換入力の設計手法のような基本的な事項をはじめとして、 マッチング条件とは入力と不確かさの幾何学的な関係に関 スライディングモードオブザーバ (1-2) や出力フィードバックに する条件で、制御対象が次式のような 多入出力系 (1-1) ∼ (1-4) や離散時間系への拡張 (1-1) (1-3) よる構成 (1-2)、 x(t)=Ax(t)+Bu(t)+d(t) (1-8) などが取り上げられています。また文献 (1-4) ではH∞制御や μ 設計と比較し、スライディングモード制御の有効性を示唆す 状態空間表現された線形システムの場合(d(t) は不確かさで る結果が得られています。応用研究は自動車、ロボット、パワ す) 、次式で表されます。 エレなどの分野で多くみられます。これに関する参考文献は d(t)∈range(B) (1-9) このマッチング条件を満たす不確かさには、入力外乱や一 y y 省略しますが、興味を持たれた方は web 上で「スライディン グモード制御 車両」や、 「sliding mode control vehicle」など と検索してみてください。 本章では切換超平面の設計法については何も述べませんで した。ロバスト性に関しては切換超平面設計法の方がより本 質的な鍵を握っています(と筆者は考えています) 。次章では この点も含めて、ツールを用いた設計手法を説明します。 参考文献 y y (1-1) V.Utkin,et al,Sliding Mode Control in Electromecha-nical Systems, Taylor & Francis (1999) (1-2) C. Edwards and S. K. Spurgeon: Sliding Mode Control, theory and applications, Taylor & Francis (1998) (a) 式(1-1)に対する軌道 (b) 式(1-7)に対する軌道 図 1 − 5 ゲインを大きくしたときの軌道 お問い合わせは (1-3) 野波,田:スライディングモード制御,コロナ社(1996) (1-4) 野波,西村,平田:MATLAB による制御系設計,東京電機大学出版局(1998) アドバンスドソリューション統括部 モデルベース開発推進室 TEL 03-5297-3255 E-mail [email protected] 11 CYBERNET NEWS No.129 spring 2009 特集 解説「スライディングモード制御」 第 2 章:スライディングモード制御の設計 特集:MATLAB を活かした技術開発 2. 1 はじめに 2.2.2 SMC設計1『切換超平面設計』 前章でスライディングモード制御(以下 SMC と略記しま 紙面の都合上、導出過程は省略しますが、切換超平面の設計 す)とはどのようなものか概説しました。本章では、SMC の 問題は次の行列 A S : = (I n − B(SB ) − 1 S )A 設計手順を概説します。 SMC設計は、制御対象の状態空間表現に基づいて行われ、多 くの行列計算が必要となります。このような場合MATLABを用 いると簡単に設計できます。SMC設計に特化したToolbox(2-2) も提供されています。そこで以下ではまず設計手順を概説し、 その後MATLABを用いた簡単な設計例を示します。 の固有構造設計問題となります(脚注※ 4)。この行列 AS がスライ ディングモード状態の動特性を決定するためです(脚注※ 2)。A、 B は既定の行列ですので、設計変数は S であり、また式 (2-3) は S を未定係数行列とする線形代数方程式ですので、S の設 計問題は線形制御系の設計問題に帰着できます。実際に、線形 制御理論の知見に基づいた以下のような設計手法が提案され 2.2 スライディングモード制御の設計概説 ています。 2.2.1 設計手順とモデリング 図1は前回の解説で用いたものであり、SMC による典型的 ● 極配置法による手法 ● 最適制御理論による手法 な位相面状態軌道を表しています。このような状態挙動は、次 ● システムの零点を用いる手法 ● 周波数整形による手法 式で定義する σ(t) σ ( t ) = S x (t ) 以下では極配置法による手法を間単に説明します。まず x, y (2-1) A, S, B を次式のように分割します。 Q の正負により、入力を不連 ⎡x ⎤ ⎡A A ⎤ ⎡B ⎤ x = ⎢ 1 ⎥ , A = ⎢ 11 12 ⎥ , B = ⎢ 1 ⎥ , S = [S1 S 2 ] x A A ⎣ 2⎦ ⎣ 21 22 ⎦ ⎣ B2 ⎦ 続に切り換えることで生じ ます。状態は σ =0 で定義さ y P れる超平面に向かい(図中 O P → Q) 、そしてこの超平面 上を滑るように原点へ向か います(図中 Q → O) 。した % 11 ⎡ x& 1 ⎤ ⎡ A ⎢ σ& ⎥ = ⎢ % ⎣ ⎦ ⎣ A 21 % 12 ⎤ ⎡ x1 ⎤ ⎡ 0 ⎤ A ⎥ ⎢ ⎥ + ⎢ ⎥u % A 22 ⎦ ⎣ σ ⎦ ⎣ B% 2 ⎦ % 11 , A % 12 , A % 21 , ここで A % 2 は以下です。 % 22 , B A 図 2 − 1 SMC による位相面軌道 式 (2-1) において x=[ y y&] , S=[1 1] T ち切換超平面の設計」と「それに状態を向かわせ、拘束する入 力の設計」の二つです。 以下では上記二つの設計を順に説明します。そのための準 備として、設計に都合が良いように、制御対象を以下の形でモ デリングします。 x& (t ) = Ax(t ) + Bu (t ) + d(t , x, u ) + 1 f (2 t,3 x) 144424443 1 424 3 公称系 適当な座標変換によって、公称系を次式のように変換するこ とができます。 がって SMC において設計者が行うことは、 「S の設計、すなわ マッチング条件 を満たす摂動 マッチング条件: d∈range(B ) マッチング条件 を満たさない摂動 (2-2) 公称系を線形系とするのは、特に切換超平面を設計しやす いからです。また SMC は、マッチング条件を満たす摂動に対 して非常にロバストです(脚注※ 1)。そこで、マッチング条件を満 たす摂動とそうでない摂動とを分けておきます。例えば入力 外乱、DCモータのインダクタンス変動や、アクチュエータの (2-4) % 11 = A11 − A12 S 2 −1S1 , A % 12 = A12 S 2 −1 A % 21 = (S1A11 + S 2 A 21 ) − (S1 A12 + S 2 A 22 )S 2 −1S1 A % 22 = (S1A12 + S 2 A 22 )S 2 −1 , B% 2 = S 2 B 2 A スライディングモード状態では、σ & = 0 、σ = 0 が成立します ので、式 (2-4) においてこれを考慮すると次式を得ます。 % 11x1 = ( A11 − A12S 2− 1S1) x1 x& 1 = A (2-5) これがスライディングモード状態の動特性を表します(脚注※ 3)。 −1 式 (2-5) の行列 A11 − A12 S 2 S1 が所望の極を持つように設計 −1 パラメータ S 2 S1 を決定します。以上が極配置法による設計 法です。 コンプライアンスなどはマッチング条件を満たす摂動として 2.2.3 SMC設計2『制御入力の設計』 モデル化できます。 次は入力の設計です。基本的なアイデアは、 「切換超平面上 ※ 1. マッチング条件に関するロバスト性は、等価制御入力を導入して説明されることが多 いのですが、ここでは直感的な説明をしてみます。例えば観測外乱の影響をなくした い場合、観測した信号をフィルタリングしてから使うのが妥当な対処法です。つまり、 摂動(外乱)の対処は、それが生じる場所のすぐ近くで行うのが最も効果的です。逆に いうと、対処可能な場所の近くで生じる摂動(外乱)ほど適切に対処できるということ です(手が届く範囲にあるものは動かしやすいです) 。制御系内で生じる摂動は制御入 力で対処するわけですが、このとき制御入力の影響を多く受ける摂動は、対処しやす い摂動なわけです。制御入力は Bu(t) というように行列 B を介して制御系に影響を与 えますので、同様に Bd(t) という形で現れる摂動は最も対処しやすい摂動といえます。 この「Bd(t) の形で表される摂動」がマッチング条件を満たす摂動です。蛇足かもしれ ませんが、制御入力は摂動にばかり対処しているわけには行きません。 「一定の回転数 で回れ」などという指令を与えなければなりません。実はここにトレードオフがあり、 12 (2-3) 指令を適切に与えながら同時に摂動も適切に対処することは難しく、特に線形制御で はこのトレードオフは克服できません。SMC は切換関数に基づく非線形(切換)入力 により、このトレードオフを克服しています(マッチング条件を満たさない摂動にも 有効な場合が多く有りますが、注意が必要です) 。 ※2. スライディングモード状態の動特性は x& (t ) = A S x(t ) で表すことができます。これは σ& = 0 という条件から導かれます。詳細は文献(2-1) p.33-35や文献(2-3)p.44-46 な どをご覧ください。 ※3. この行列は AS よりも次数が少なくなります。実は AS はフルランクではなく、式 (2-5) の行列の固有値と0固有値を持ちます。 ※ 4. 通常はこの行列の固有値だけを考慮しますが、マッチング条件を満たさない摂動に対 するロバスト性を考慮する場合には、固有構造も考慮します。詳しくは文献 (2-1) の p.68 ∼を参照ください。 CYBERNET NEWS No.129 spring 2009 に状態があるとき切換関数は0である。よって切換関数を0 式 (2-10) から、インダクタンスの摂動はマッチング条件を とするように入力を設計すればよい」ということです。そこで 満たす摂動であることが分かります。一方負荷変動はマッチ 以下の条件を使います。 ング条件を満たしませんが、この例の場合は問題はありませ σ ( t ) σ& (t ) < 0 (2-6) これは「切換関数は必ず零に向かって変化せよ」という条件で & (t ) = Sx& (t ) ですので、式 (2-2) の両辺に S を乗じ す。ここで σ て式 (2-6) へ代入すると次式(脚注※ 5)を得ます。 σ(t ) ( SAx(t ) + SB u (t ) ) < −σ(t )SBd% (t , x, u ) ん。モデリングが済むと、次は前述の手順で切換超平面・制御 則を設計します。 ここではEdwardsらによって提供されているSliding Mode Control Matlab Toolbox(2-2) を利用します。設計を行うm-file、 数値シミュレーションのためのSimulinkモデルおよび結果を図 (2-7) 、 2−3に示しました。インダクタンス値は10%増加( ξ = 0.1 ) ただし、Bd̃(t,x,u)=d(t,x,u) です。 負荷は 1.25 秒から2倍になっています。摂動にもかかわらず 上式を満たす入力 u(t) を設計すれば、それが目的の入力で 回転数は目標値によく追従していることが分かります。 す。さまざまな設計法がありますが、良く行われる方法では次 式のように入力の形を決め DCモータのSMC設計 (2-8) u (t ) = −(SB) − 1 SAx(t ) − ρ sgn ( σ(t ) ) 式 (2-7) を満たし、かつ ρ > 0 であるように ρ を決定します。 以上を整理します。式(2-8)を式(2-7)に代入すると ρ の満たす べき条件式 ρ > SBd% (t , x, u ) を得ます。よってこれを満た SlidingModeToolboxのintacコマンド ControlSystemToolboxのackerにより 極配置を行いSを設計 SlidingModeToolboxのcontilaコマンド すρ を用いて式(2-8)の制御入力を与えます。このとき式(2-6) が満たされ、つまりは切換超平面に状態を到達させ、拘束する Simulinkモデル ことができます(脚注※ 7)。 2.3 DCモータの速度制御 例題としてDCモータ(図 2 − 2)の速度制御を行います。 インダクタンスが摂動する場合を考え、これに対してロバス トな制御系を設計します。定常偏差補償のために、積分動作を 用いたスライディングモード追従制御を設計します(脚注※ 6)。 まずDCモータを式 (2-2) の形でモデリングします。インダク 数値シミュレーション結果 L0 − L , L0 : L 公称値 , L : 実値 (2-9) さらに負荷抵抗 b も公称値 b0 と変動 bΔ によって b = b0 + bΔ とします。このとき摂動も含めたDCモータは、式 (2-2) と同 様に次式のモデルで表現できます。 x& (t ) = Ax(t ) + B u (t ) + Bd (t , x, u ) + f (t , x) 14243 123 インダクタンス摂動項 (2-10) 入力 電圧 u L 抵抗 R インダクタンス Ke -1 0 0.5 1 0 0.5 1 1.5 2 2.5 1.5 2 2.5 20 10 0 -10 -20 Time ( sec ) 図2−3 MATLABによるSMC設計と数値シミュレーション結果 Kt J ⎤ ⎡ ω (t ) ⎤ ⎡ −b J ⎡ 0 ⎤ x(t ) = ⎢ ⎥,A = ⎢ ⎥,B = ⎢ ⎥ ⎣ ia (t ) ⎦ ⎣ − K e L0 − R L0 ⎦ ⎣ 1 L0 ⎦ d(t , x, u ) = ξ L ( [ 0 − K e − R ]x(t ) + u (t ) ) ⎡ bΔ 0 ⎤ f (t , x) = ⎢ ⎥ x(t ) ⎣ 0 0⎦ i 0 -0.5 負荷摂動項 上式中の x、A、B、d、f は以下のとおりです。 電流 1 0.5 -1.5 Control Input ( V ) ξL : = Speed ( rad/sec ) 1.5 タンスの摂動率を次式で定義します。 2.4 おわりに 本章では、スライディングモード制御の設計手順を概説し ましたが、紙面の都合上、細かい説明は省略いたしました。特 に不連続入力に起因するチャタリングなどの問題や、状態を 直接観測できない場合のオブザーバを用いた構成などは実用 上重要です。これらの詳細は文献 (2-1) や (2-3) などをご参照 ください。 イナーシャ 次章では実際的な応用例や研究例をいくつか紹介します。 J 回転角速度 Kt:トルク定数 Ke:逆起電力定数 参考文献 (2-1) C. Edwards and S. K. Spurgeon: Sliding Mode Control, theory and applications, Taylor & Francis (1998) 図 2 − 2 DC モーターモデル ※ 6. この場合、積分器の状態も含んだ拡大状態空間モデルに対して前節の手法を適用しま す。詳細は参考文献(2-1) のp.82などを参照ください。 (2-2) C. Edwards and S. K. Spurgeon: Sliding Mode Control Matlab Toolbox: 以下の web ページでダウンロードが可能です(無料)http:// www.le.ac.uk/eg/ce14/vscbook/mfiles.html ※ 7. したがって摂動 d̃(t,x,u) のノルム最大値が既知である必要があります。 (2-3) 野波,田:スライディングモード制御,コロナ社(1996) ※ 5. 簡単のためマッチング条件を満たさない外乱は省略します。 お問い合わせは アドバンスドソリューション統括部 モデルベース開発推進室 TEL 03-5297-3255 E-mail [email protected] 13 CYBERNET NEWS No.129 spring 2009 特集 解説「スライディングモード制御」 第3章:スライディングモード制御の応用例 特集:MATLAB を活かした技術開発 3.1 はじめに 入力の設計が特徴的です。また設計を進める上で最大のポイ 2 章ではスライディングモード制御(以下 SMC と略記しま す)の設計手順を概説し、シンプルな例題を示しました。本章 では、実際的な応用例を紹介します。国内外を問わず多くの応 用研究がありますが、ここでは電動スロットルバルブの制御 に SMC を応用した例 (3-1) を簡単に紹介します。さらにスイッ チドリラクタンスモータの状態推定にスライディングモード オブザーバを応用した例を紹介します。 本解説では、上記応用例について詳述するスペースはあり ントはモデリングですので、以下で説明します。 制御系設計では、何らかの制御系設計手法が使えるように、 使いたい制御系設計手法において標準的な形で、制御対象を モデル化することが第一です。SMC において標準的な形は次 式です。 x& (t ) = Ax (t ) + Bu (t ) + Dd (t ) + Ef (t ) ノミナルモデル ませんが、考え方や設計手順に重きを置いて解説したいと思 マッチング マッチング 条件を 条件を 満たす外乱 満たさない外乱 います。 3.2 応用例:電動スロットルバルブ(横山 2002) 良く知られているように、主に環境問題への配慮から自動 車の電子制御化が著しくなっています。特にスロットルバル ブの電子制御化は、駆動力や空燃費を適切に制御することを 可能とします。この研究 (3-1) では、図 3 − 1 に示すような電動 スロットルバルブを制御対象としています。この系にはフェ イルセーフ(脚注 1)を目的として図 3 − 2 のような特性を持つ非 したがって、本例では図 3 − 1 の系を上記の形式でモデル化す る必要があります。制御するのはスロットルバルブの開度で すが、モータがバネやモデル化誤差などから外乱トルクを受 けると考え、モータ軸の回転角度制御問題として以下のよう にモデル化します。 J d 2θ dθ +D + F (θ ) + d = K f i 2 dt dt (3-2) di dθ + Ri + K v =u dt dt (3-3) 線形バネが用いられています。一方で、制御系にとってはこの L バネの非線形性が問題となってしまいます。このバネの非線 形性の取り扱いとモデル化誤差などにより発生する外乱トル クへの対処がポイントです。 (3-1) θ:回転角、d:外乱トルク、J:慣性モーメント、L:コイルインダクタンス、 :逆起電力定数、D:粘性抵抗定数 R:抵抗、 K f:トルク定数、K v 設計概説 設計の流れを図 3 − 3 に示します。モデリングから始まる大 式 (3-1) のように表すためには不連続な特性を持つ非線形バネ きな流れは通常の制御系設計と同様ですが、切換関数と切換 をどのように取り扱うかがポイントとなりますが、本例では、 図 3 − 2 に示すように線形バネとモデル化誤差として次式の ようにモデル化します。 非線形バネ F (θ) = k{θ + f D (θ ) { 線 形バネ スロットルバルブ (3-4) ギアセット モデル化 誤差 制御対象 DCモータ 物理モデリング 図 3 − 1 電動スロットルバルブシステム 電動スロットシステム制御目的は開度 適切に簡略化 インダクタンス無視 ● モータの回転角度制御とする ● 非線形性:線形近似+近似誤差とする 外乱:マッチング外乱とアンマッチな外乱 で分ける ● 状態空間モデル:サーボ系を構成するため に誤差の積分項を状態として含ませる ● 非線形バネ特性 SMC 設計 のための モデリング F(θ) トルク kθ(ノミナル) シャフト回転角(θ) SMC 設計 ・切換関数 ・切換入力 デフォルト回転角 線形バネとして近似した場合の特性 図 3 − 2 非線形バネ特性 ※脚注1:制御不能になった場合に機械的にバルブ開度を保持します。 14 制御系構成 ● ● スライディングモード状態の動特性が仕 様を満たすように ● スライディングモードが発生し、さらに切 換ゲインを小さく抑えるように ※ 本例ではオブザーバも設計していますが省略 します。 図 3 −3 設計の流れ CYBERNET NEWS No.129 spring 2009 さらにコイルインダクタンスを無視すると、次式のようなモ オブザーバ全体の構成は図 3 − 3 となります。図中の SRM デルを得ます。 モデルでは SR モータの数学モデルに基づいて、推定角度と電 2 JR dθ dθ + (DR + K v K f ) + Rk θ dt 2 dt ⎛ R ⎞ d⎟ + Rf D (θ) = K f ⎜ u − ⎜ K f ⎟⎠ ⎝ 流値から磁束を算出します。磁束オブザーバでは電圧と電流 から磁束を推定します。SMO ではモータモデルを用いて計 (3-5) 算される磁束推定値と磁束オブザーバの磁束推定値とから、 角度と角速度を推定します。 この例では、さらに離散化による実装を考慮して離散時間 これで準備が出来ましたので、あとは制御系を設計するた で定式化しており、実験により有効性を確認しています。 めに上式を状態空間モデルへ変形し、切換関数や非線形入力 また参考文献 (3-3) は SMO をインダクションモータの状態 を設計していきます。詳細は省略しますが結果として入力は 推定器として応用した例です。外乱の構造を考慮した設計法 次式のように構成されます。 を提案しています。外乱やモデル化誤差に対する状態推定の u= ueq { + unl + { 等価 制御入力 切換入力 ul { + uf { 比例到達入力 線形近似 誤 差 補償入 力 (3-6) 上式の入力は、それぞれ目的の異なる 4 つの項から構成され ロバスト性について、従来のオブザーバと比較し、SMO の優 位性を示しています。 3.4 おわりに ています。実は、基本的には、SMC で必要なのは切換入力だ 近年多くの応用例が見られるスライディングモード制御に けです。しかしながら、切換入力だけを用いると非常に大きな ついて解説してきました。スライディングモード制御の特徴 切換ゲインが必要となる場合があります。そこで、線形入力 は、比較的単純な制御則で高いロバスト性が実現できるとこ や、既知のモデル化誤差を補償する入力 (uf ) を切換 ろに在ります。また非線形制御則(脚注3)ですので、線形制御で 入力と共に用います。こうする事で切換ゲインを小さく抑え は難しい「追従性を高めつつ安定性を頑強にする」ことができ ることが出来ます。さらに ul は比例到達入力で、到達モードを ます。スライディングモード制御はシステムの構造を考慮し、 速やかに収束させるための入力です。 非線形入力を用いて積極的に外乱を打ち消す制御手法です。 本応用例では、状態フィードバックを用いるために状態観 現在、制御系設計においては、制御対象のモデルに基づくモデ 測器をスライディングモードオブザーバを用いて構成してい ルベースの設計法が注目されていますが、スライディングモー ます。数値実験、実機実験を通して有効性を検証しており、優 ド制御は制御対象や外乱の構造を考慮し、外乱に積極的に対 れた制御性能を示しています。 処する手法です。線形制御よりも多くの恩恵をモデルから受 (ueq) (脚注2) ける事ができると思います。 3.3 その他の応用例 制御系が満たすべき仕様が厳しくなっている現在、線形制 SMC は高いロバスト性と高周波の非線形入力が特徴です 御のトレードオフを克服できるというスライディングモード が、この特徴はパワエレと相性が良く、多くの応用例がありま 制御の特徴は、さらに注目されていくと考えています。スライ す。ここではスライディングモードオブザーバ(SMO)の応用 ディングモード制御の設計手法はほぼ確立されているといわ 例をいくつか紹介します。 れており、制御系設計に応用する準備は整っています。さらに 参考文献 (3-2) はスイッチドリラクタンスモータ(SR モー は機械系や化学系をはじめとして数学的なモデリング技術が タ)のセンサレス制御を行なうことを目的とし、状態観測器 高まっていますので、これに伴いスライディングモード制御 として SMO を応用しています。SR モータのセンサレス制 の応用も広がっていくのではないでしょうか。 御は有用な技術ですが、モータの非線形性が強いため難しい スライディングモード制御の参考文献として前章まででも 問題です。 いくつか取り上げてきましたが、端的にまとまっている文献 として参考文献 (3-4)、多くの応用研究が網羅されているもの 回転角推定値 として参考文献 (3-5) を挙げて終わりとします(脚注4)。 磁束予測値 ここまで読んでいただき、ありがとうございました。御質問や SRM model 電流 磁束推定値 御指摘などあれば下記お問合せ先まで連絡頂ければ幸いです。 Sliding Mode Observer 参考文献 Flux Observer (3-1) 横山誠:電動スロットルのスライディングモード制御,日本機械学会論文 集(C編)68 巻 670 号(2002-6) 電圧 回転角速度推定値 (3-2) R.A.McCann, M. S. Islam, I. Husan:Application of Sliding-Mode Observer for Position and Speed Estimation in Switched Reluctance Motor Drives, IEEE, Trans. Ind. Applications, 37-1, (2001) 図 3 − 4 SR モータの状態推定 ※脚注2:等価制御入力と呼ばれる線形フィードバック入力です。初期状態によってはこ の入力も過大になる場合があります。 ※脚注3:切換入力を用いず、線形入力だけでSMCを構成する例もあります。チャタリン グ低減などの意味で効果的ですが、線形制御ですので、トレードオフが存在し十 分なロバスト性が得られない場合があります。 ※脚注4: 今回でリレー解説は終わりです。目を通していただき、誠にありがとうございま した。言葉足らずで分かりにくい箇所もあったと思います。何かございましたら 遠慮なくご連絡いただければ幸いです。 お問い合わせは (3-3) Somboon Sangwonwanich,米本,古橋,大熊:スライディングオブザー バを用いた誘導電動機の二次磁束推定とその設計法, 電学論C, 110 巻 4 号, (1990) (3-4) K.D.young, V.I.Utkin, Umit. Ozguner:A Control Engineer's Guide to Sliding Mode Control, IEEE, Trans. Cont. Sys. Tech. 7-3 (1999) (3-5) Special Issue on Variable Structure Systems", ASME, J. Dyn. Syst., Meas., Control, 122-4 (2000) アドバンスドソリューション統括部 モデルベース開発推進室 TEL 03-5297-3255 E-mail [email protected] 15 CYBERNET NEWS No.129 spring 2009 CAE ユニバーシティ 特別講座 CAE ユニバーシティ特別講座 第1回 ハードディスク装置のナノスケールサーボ制御技術と HDD ベンチマーク問題 宇都宮大学 大学院 工学研究科 准教授 平田 光男 先生 サイバネットは、エンジニアのための理論教育講座「CAE ユニバーシティ」を主催しています。このコーナーではその 「特別講座」として、講師の方などに専門分野をわかりやすくご紹介いただきます。 はじめに 50 置として良く用いられてきましたが、最近では、カーナビゲー ションや携帯型音楽プレーヤ、そして、ハードディスクレコー Gain (dB) これまでハードディスク装置はパソコンなどの外部記憶装 ダなど、広く応用されるようになりました。今では、記憶容 0 −50 3 10 4 Full−order model w/ parametric variation Phase (degree) れ、そこに、記録再生ヘッドを高速かつ高精度に位置決めして、 10 180 す。ハードディスク装置では、図 1 に示すように回転している ディスクに数万から数十万のトラックが同心円状に書き込ま 5 10 Frequency (Hz) 量が 1 テラバイトを越えるものが一万円以下で売られていま データの記録や再生を行っています。現在、トラック幅は 200 90 0 −90 −180 3 10 ナノメートル以下であり、隣接するトラックのデータを誤っ 4 5 10 Frequency (Hz) て書き換えないように、ヘッドの追従誤差は 10 ナノメートル 10 図 2 制御対象の周波数応答 以下に抑えられています。これはちょうど、ヘッドアームの全 長を東京タワーにみたてたとき、その先端を 1mm 以下の精 動距離にもよりますが、おおむね数ミリ秒以下です。このよう 0.5 PES [track] 度で制御していることになります。また、位置決め時間は、移 −0.5 に、手の上に乗るハードディスク装置の中でこれほどまでに サーボ制御」と呼んでいます (1)。 PES [track] ナノスケールの精度で高速に制御する技術を「ナノスケール 7 7.005 7.01 7.015 7.02 7.025 7.03 7.035 7.04 7.045 7.05 0.1 Sensor Noise 0 −0.1 7 7.005 7.01 7.015 7.02 7.025 7.03 7.035 7.04 7.045 7.05 0.1 PES [track] 高速かつ高精度な制御が行われています。最近では、対象物を Force Dist at PES 0 Flutter Dist 0 −0.1 7 7.005 7.01 7.015 7.02 7.025 7.03 7.035 7.04 7.045 7.05 PES [track] 0.2 RRO 0 −0.2 7 7.005 7.01 7.015 7.02 7.025 Time [s] 7.03 7.035 7.04 7.045 7.05 図 3 外乱の時間応答 として一般に公開しています。現在、Ver.3.1 が最新版であ り、次の URL からダウンロードすることができます(http:// VCM VC mizugaki.iis.u-tokyo.ac.jp/nss/) 。 以下では、HDD ベンチマーク問題で定義されているモデ 図 1 ハードディスク装置の基本構造 ルを使って、ヘッド位置決め制御系の制御対象と外乱につい て説明します。 HDD ベンチマーク問題 制御対象の伝達関数 最近のハードディスク装置の制御系は 1 チップ化され、完 ヘッドアームを駆動するボイスコイルモータ(VCM)が発 全にブラックボックスになっています。したがって、製品の開 生するトルクからヘッド位置までの伝達関数は、ヘッドアー 発者以外、制御対象の特性を実測したり、新しい制御理論の適 ムが完全に剛体として振る舞う場合、二重積分システムにな 用検証ができません。そこで、電気学会産業計測制御技術委員 ります。しかし、実際には高速に移動させようとして急な加速 会「マスストレージシステムのための次世代サーボ技術調査専 と減速を行うと、機械共振が起こり出力に振動が現れます。つ 門委員会」では、 この障壁を取り除くために、 ワーキンググルー まり、制御対象は弾性体として取り扱う必要があります。この プを組織し、ハードディスク装置のリファレンスモデルの作 とき、伝達関数は 成に取りかかりました。日立、日立 GST、東芝、富士通各社で 実際にハードディスク装置の制御系設計に携わっている企業 研究者がメンバーに加わりました。また、筆者もとりまとめ役 として加わりました。その成果は、 「HDD ベンチマーク問題」 16 と表現でき、第 1 項目を剛体モード、第 2 項目を共振モード CYBERNET NEWS No.129 spring 2009 [FlutterDist.Time,FlutterDist.Data] −K− Flutter Noise g_flutter [SensorNoise.Time,SensorNoise.Data] HDD Benchmark Ver.1.0 Track Following Model PID + Multi−rate Notch Filter Copyright (c) MSS Benchmark WG −K− Sensor Noise g_sensor [RRO.Time,RRO.Data] −K− RRO Noise g_rro [ForceDist.Time,ForceDist.Data] −K− Torque Noise g_torque PESDataT To Workspace 1 sys_C1 sys_C2 PID Controller Notch Filter −K− Ground sysd_P loopgain Discrete−time Plant Zero−Order Hold ControlDataT To Workspace 2 図 4 フォロイング制御系 と呼びます。図 2 に HDD ベンチマーク問題で定義されている NRPE6σ rms=16.26, RPEpp=12.50, TPEpp=33.14 (N=998) 20 制御対象のボード線図を示します。なお、制御対象の特性は、 15 ルモデルだけでなく、変動モデルの特性も合わせてプロット 10 しています。この図から、高周波域にいくつもの共振モードを 5 持ち、ゲイン特性だけでなく位相特性も大きく変動すること がわかります。 PES (%TP) 個体差や温度などの環境条件によって変動するため、ノミナ 0 −5 外乱の特性 −10 ハードディスク装置では、力外乱、観測雑音、フラッタ外乱、 RRO と呼ばれる 4 種類の外乱が存在します。図 3 にHDD ベ −15 −20 0 20 ンチマーク問題で定義されたこれらの外乱の時間応答を示し 40 60 80 100 120 Sector No. 140 160 180 200 220 図 5 フォロイング制御時の追従誤差応答 ます。力外乱はディスクの回転にともなう空気の流れがヘッド アームに作用して起こるもので、主に低周波成分から成ります。 一方、観測ノイズは、正規性白色雑音に近い特性を持ちます。 いては、より高周波域の共振モードに対しても有効になるよう、 フラッタ外乱は、空気流によって励起されたディスク面の振動 その2倍の52.8kHz で動作させています。このように、複数の が、ヘッドとトラックの相対誤差として表れるもので、ディスク サンプリング周波数をもつ制御系をマルチレート制御系と呼 の振動モードから決まる特定の周波数成分を持っています。図 び、ハードディスク装置の制御では良く用いられています。 3 の時間応答からも、特定の周波数成分で振動している様子 この制御器を用いてフォロイング制御を行ったときの追従 が確認できます。RRO(Repeatable Run Out) は、ディスクの 誤差信号(PES:Position Error Signal)を長時間取得し、回転 回転に同期した位置外乱であり、ディスクの偏芯や歪みだけで に同期した成分と非同期の成分に分離してプロットしたもの なく、位置信号の書き込み誤差にも起因しています。 を図 5 に示します。縦軸は PES をトラック幅に対する百分 率で表したもの、横軸はセクタ番号を表します。セクタ番号 ヘッド位置決め制御系 は、ディスク 1 周分の位置信号に割り振られた番号のことで、 ハードディスクのヘッド位置決め制御には、大きく分けて、 HDD ベンチマーク問題では、1 周当たり 220 個の位置信号 トラック間を高速に移動するシーク制御と、データを読み書き が埋め込まれているとしています。図 5 の各線は追従誤差に するために、トラック中心に精度良く追従するフォロイング 関して、最大・最小値(緑) 、非同期成分の最大・最小値(青) 、 制御があります。シーク制御では、制御対象の機械共振を励起 非同期成分の 6 σ 値(紫) 、同期成分(赤)を表しています。こ せずにいかに速く目標のトラックに到達させるかが重要であ の結果から、種々の外乱を抑圧しながら、追従誤差をトラック り、フォロイング制御では、制御対象の変動に対して常に安定 幅の 15%以下に抑えていることがわかります。 性を保ちつつ、トラックに高精度に追従することが求められま す。図4 はHDD ベンチマーク問題に含まれるフォロイング制 御系のSimulink ブロックを表しています。フィードバック制 御器はPID 制御器とノッチフィルタの直列結合で構成されてい ます。位置信号のサンプリング周波数は26.4kHz であり、PID 制御器もその周波数で動作していますが、ノッチフィルタにつ お問い合わせは 参考文献 (1) 山口,平田,藤本:ナノスケールサーボ制御,東京電機大学出版局,2007 次回予告! 今回に引き続き、ハードディスクの制御について具体的な設計 例を交えて解説いただきます。楽しみにお待ちください。 事業企画管理室 TEL 03-5297-3608 E-mail [email protected] 17 CYBERNET NEWS No.129 spring 2009 新製品情報 3 次元ダイレクトモデラー「SpaceClaim Engineer 2009」 SpaceClaim Engineer 概要 解析準備用ツールセット SpaceClaim Engineer は、直感的な操作でダイナミックにモデ 3 次元 CAD データを読み込むと、面が欠落したり、ギャップが ルを作成・編集できる 3 次元ダイレクトモデラーです。プル・移動・ 生じるといった問題が発生し、解析を行う前にモデルを修正しな フィル・組合せの 4 つの基本ツールでほとんどのモデル作成や編 ければならないことがあります。また、解析の準備段階では、モデ 集作業が可能なため、従来のツールのように複雑なコマンドを探 ルの簡略化もしばしば行われます。このような解析準備のための したり覚える必要はありません。 モデル変更要求を補助するために、SpaceClaim Engineer には さらに、各種 CAD とのダイレクトなデータ連携や汎用 FEM 連 次のようなツールが実装されています。 成解析ツール ANSYS との高い親和性により、解析のためのモデ ル修正を行う解析エンジニアに最適なツールです。 ANSYS Workbench との双方向連携 SpaceClaim Engineer には ANSYS Workbench との双方向連 携を可能とするインテグレーション機能が標準装備されており、 SpaceClaim Engineer と ANSYS Workbench を同一環境にイン ● 欠落面、ギャップ、分割エッジ、不正確なエッジ、微小面、干渉 箇所、ラウンドなどの検出と削除 ● ボリューム (内部領域)抽出 ● 中立面の作成 ● 面のマージ ● ボディ間の接触面の検出・定義 ストールするだけで双方向連携を実現できます。この双方向連携 読み込んだ IGES データに 対して欠落面を検出 によって、解析後の CAD データの変更はそのまま Workbench 解 析環境に反映されます。 主要な CAD データフォーマットのサポート SpaceClaim Engineer は、Pro/E、SolidWorks、CATIA V4/ 製品情報、評価利用・無料体験セミナー申し込みはこちらから http://www.cybernet.co.jp/spaceclaim/ V5、ACIS、Parasolid、IGES をはじめ主要な CAD データを直接 読み込んで再編集することができます。これら CAD データを読み アドバンスドソリューション統括部 PLM グループ お問い合わせ 込んだ後は、SpaceClaim で一から作成したモデルと同様に、ダ TEL 03-5297-3247 E-mail [email protected] http://www.cybernet.co.jp/spaceclaim/ イレクトにモデル変更することが可能です。 解析データ管理ツール「ANSYS Engineering Knowledge Manager」 解析技術は個人のスキルによる差が大きく、技術の共有が難し いとお考えの方も多いのではないでしょうか? また、過去に誰かが作ったデータを見て、 『どのように修正した のかわからない。 』 『どのバージョンで作ったデータなのかわから ない。 』 『以前と今回で結果が違う原因がわかない。 』 『以前のデー タに戻したい。 』などと困ったことはありませんか? ANSYS Engineering Knowledge Manager (ANSYS EKM) は、そうした悩みをお持ちのエンジニアの方が、ANSYS 等の解 析データの管理・プロセス管理を効率よく行なうことを可能にす る PDM ツールです。ANSYS EKM を使用することで技術情報の ●ワークフローの作成 図のような解析フローを作成することができ、経験が浅いエン ジニアであっても、あらかじめ決められたフローにそって解析 できる環境を提供します。 また LAN、WAN、インターネットを経由してデータにアクセ スできるため、解析担当者と遠隔地にいる承認者が同じデータ を共有して作業を進めていくことができます。 ●カスタマイズ機能 ANSYS や他社製品のカスタマイズ機能と組み合わせて、ルー チンワークのフローを構築できます。 共有や過去のデータを再利用することができ、開発コストの削減 が実現します。 熟練者A 確認 主な機能 確認 NG 上長 OK 確認 NG OK NG レポート 作成 自動申請 結果評価 構造解析 自動申請 流体解析 モデル 作成 担当者 ●過去のデータ修復 メッシュ 作成 自動申請 ●高度な検索機能 キーワード検索だけでなく、バージョン、データ作成者、節点 要素数、解析タイプ等のクロス検索が可能。データ抽出にかか る時間を大幅に短縮できます。 熟練者B OK Webブラウザ上で解析データを共有 データのアクセス履歴や修正履歴を残すことができます。修正 内容を確認したり、過去のデータに戻して作業可能です。 解析フローの例 ●レポート作成 解析データの詳細や複数データの比較レポート、また、カスタ マイズしたレポートを作成できます。 メカニカル CAE 事業部 マーケティング室 お問い合わせ TEL 03-5297-3208 E-mail [email protected] http://www.cybernet.co.jp/ansys 18 CYBERNET NEWS No.129 spring 2009 PCB 設計者を悩ませる PCB 設計・製造仕様書の作成は、基板開発全 新製品情報 PCB ドキュメント自動生成システム「BluePrint-PCB」 で社内外で簡単に情報共有が出来ます。 体の約 20%を占めるといわれています。 従来、手作業で行っていたこの作業を BluePrint-PCB によって「自 動化」することで、基板開発の効率化を実現します。 PCB ドキュメント作成時間を最大 8 割削減 仕様変更に伴うデータ更新を自動的に反映・リビジョン管理 下記チャートで示されるように、BluePrint-PCB 上でデータの一元 管理が可能です。例えば CAD データの仕様変更が生じた場合、データ の上書きをすることで、自動的に変更箇所が更新されるので、修正の PCB CAD データをインポートするだけで各種図面を自動生成し、 手間を省き、手作業によって生じていたミスも無くなります。 指示書や仕様書などの複雑な PCB ドキュメント作成時間を大幅に削 こ の よ う にBluePrint- 減します。 PCBを 使 用 す る こ と で、 Excel や Word 同様の形式で開発されているため、操作性は親しみ PCB設計者がわずらわし やすく、またハイパーリンク機能などを い間接作業から解放され 使用して図面上で詳細な説明が可能と るだけでなく、製造工程へ なります。回路図の部品情報や、会社ロ の正確且つ迅速な情報伝 ゴ等の画像データもインポートでき、高 達を実現します。 品質なドキュメント作成を実現します。 応用システム第 2 事業部 EDA ソリューション部 作成された図 面 情 報、指 示 書 などは PDF・HTMLファイルでの閲覧、もしく は無料ビューワをダウンロードすること CAD データを読み込み、 図面や層構成を自動生成 お問い合わせ TEL 03-5297-3324 E-mail [email protected] http://www.cybernet.co.jp/eda/blueprint/ マニュアル自動作成ツール「epiplex Documentor」 epiplex Documentor は、Windows アプリケーションの操作画 面を自動でキャプチャ(収録)すると同時に、操作内容も自動で文章 化、あとは自動整形された文書を出力するだけのマニュアル自動作成 ツールです。手作業で行っていたマニュアル作成に比べて、epiplex Documentor を使うとマニュアル作成にかかる時間を約 1 / 3 に削 減することができます。 3 ステップで簡単マニュアル作成 ステップ 1 マニュアルを作成したいアプリケーションを操作して、画 面イメージと操作内容を自動で収録(キャプチャ)します。 豊富な編集機能 「です・ます」調、 「である」調など、文 章を表現する言葉遣いを標準化する機能 や、デザインテンプレートを用いて、生成 される文書スタイルを統一する事ができ ます。また、操作画面のイメージを必要な 部分だけ切り出す、吹き出しや付箋を用 いて注釈を挿入するなど、マニュアル作成に必要な編集機能を豊富に 備えています。 ステップ 2 画面イメージの加工や収録中の操作ミスの修正・削除、操作 内容の文章追加・修正・削除など、収録内容を確認しながら編集します。 IT ソリューション部 DEPI グループ お問い合わせ ステップ 3 完成したマニュアルは、Word・PDF・HTML など、使用 TEL 03-5297-3678 E-mail [email protected] http://www.cybernet.co.jp/epiplex/epidoc/ 目的にあわせたフォーマットで出力することができます。 ファイルサーバアクセスログ収集ツール「Ci-Audit for File Server(CiA)」 「Ci-Audit for File Server (CiA)」はセキュリティ監査で必要となる しての詳細な操作内容を取得します。収集したアクセスログは様々 サーバ上のファイルへのアクセスログを取得するツールです。個人情 な検索条件で抽出でき、特定のファイルに対して操作履歴を簡単に 報保護や内部統制への対応など IT システムのログ監査は企業活動に 把握することも可能です。また、指定した条件に合致するファイルア とって必要不可欠な要件となっていますが、取得したログの管理や活 クセスがあった場合、IT 管理者にメールで通知するアラート機能も 用などは IT 管理者にとって難しい課題です。CiA はログ管理が抱える 実装しています。 問題に対し、以下 3 つのポイントに着目して開発された製品です。 ●監査が必要な対象を絞ってシンプルに ●低価格での導入が可能 従来のファイルサーバアクセスログ取得製品は高額な製品が多く、 ファイルサーバは顧客情報や機密情報など社内の重要な情報が格 予算が潤沢な企業でなければ導入が難しい状況でした。CiA は「1 納される場所です。CiA は監査対象をファイルサーバのみに絞るこ ライセンス」からの購入が可能ですので、部門単位での導入など柔 とで IT 管理者の負荷を軽減します。 軟なログ監査運用を実現します。 ●高精度なアクセスログの収集 監査対象サーバに独自開発のエージェントをインストールすること により、Windowsイベントログだけでは把握できないファイルに対 IT ソリューション部 IT インフラ営業グループ お問い合わせ TEL 03-5297-3487 E-mail [email protected] http://www.cybernet.co.jp/cia 19 設計、研究、開発、解析担当者に役立つ理論教育 CAE ユニバーシティ なぜ、理論教育が必要か? CAE はものづくりにおいて非常に有用なツールです。ツールは「ひと」が必要な知識をもって、正し く活用してこそ、有効活用が可能となります。ツールの性能を引き出すためには理論教育が必要です。 ・入力条件は正しく与えられているか? ・計算結果は本当に信頼できるのか? ・計算結果がおかしいとき何が間違えているのか? Etc. K e d e = Fe :要素剛性方程式 FEM 原理テキスト 一部抜粋 Ke = ∫ B Te D Be d Ω Ω 2 F e = ∫ N Te b d Ω + ∫ N Te T d Γ Ω ∂Ω ⇒上記を解決するためには物理・工学・数学の理論の 2 知識が必要です!! 2 CAE ユニバーシティではツールの有効活用のための理論教育を提供し、 「ものづくりのための、ひとづくり」を応援します。 CAE ユニバーシティとは?! CAE、シミュレーションの中で使われる物理、工学、数学 の理論を座学、実験、シミュレーションを通じて体系的に 身に付けることが可能な教育プログラムです。 2009 年度の CAE ユニバーシティ ・開講期は年 2 回になります。 Ⅰ期(7 月∼9 月)、Ⅱ期(1 月∼3 月) 2009 年度 4 月 講座 5 月 6 月 7 月 8 月 9 10 11 12 1 月 月 月 月 Ⅰ期開講 月 2 月 3 月 Ⅱ期開講 座学による理論学習 新規講座開講 基礎講座 … 数学理論中心 (詳細はホームページでご確認ください) 専門講座 … 物理や工学理論中心 1 流体力学分野の講座ができます !! 従来の FEM、制御、デジタル信号処理、アナログ 回路、光学に加えて 6 分野に対応。開講の 実習 ご要望をたくさんいただき、まずは流体力 学基礎講座を開講いたします! 実験・シミュレーションで「手を 動かして」理論の理解を深める 2 制御分野の講座に制御系モデリングの手法 を学べる「制御モデリング講座」が加わり ます。モデリングでお悩みの方はぜひ、ご 参加ください! 講師・テキストが自慢 !! 講座の詳細情報・ お申し込みは Web にて ! 大学、企業の専門家を招聘して講義を実施。テキストは実務に役立つオリジナル。 お問い合わせ 発行元: 検索エンジンで サイバネットシステム株式会社 CAE ユニバーシティ室 TEL 03-5276-3692(月∼金・9:00∼17:30) E-mail [email protected] サイバネットシステム株式会社 東京本社 〒101-0022 東京都千代田区神田練塀町 3 富士ソフトビル TEL.03-5297-3010(代表) FAX.03-5297-3609 西日本支社 〒540-0028 大阪市中央区常盤町 1 丁目 3 番 8 号 中央大通 FN ビル TEL.06-6940-3600(代表) FAX.06-6940-3601 中部支社 TEL.052-219-5900(代表) FAX.052-219-5970 〒460-0003 名古屋市中区錦 1 丁目 6 番 26 号 富士ソフトビル URL:http://www.cybernet.co.jp/products/magazine/cybernet_news/
© Copyright 2026 Paperzz