3
1
都 市 科 学 研 究 第 1号 2
007
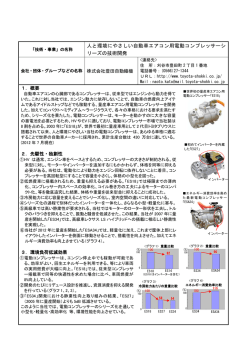
安心安全防災地域情報ネットワークシステムと応用
RegionalNetworkInformationSystemAimedatReliefandSafetyImprovement
andtheApplication
山口亨1)・玉井郁夫.2)・梅田雅士人秋山哲男 4)
2
ToruYamaguchil
)
,
肱uoTamai,
1 MasashiUmeda),TetsuoAkiyama)
3
4
要 約
情報インフラは整い、便利になり、そして高度化してきた。しかし、機器を活用することのできない情報弱者
と呼ばれる人たちが存在し、格差が進んでいるのが現状である。そこで、障害や状況に関わらず必要とする情報
を簡単に入手することができるネットワークシステムが必要である。本稿では、意図や障害を認識する動作認識
モデルとそこから得た知識を共有することができるネットワークインテリジェンスを提案する。そして安心、安
全の向上を目的とする地域情報ネットワークシステムを構築する。
キーワード:安心安全地域ネットワークシステム、ネットワークインテリジェンス、動作認識機構、人間支援シ
ステム
A
b
s
t
r
a
c
t
I
n
f
o
n
n
a
t
i
o
ni
n
企a
s
t
r
u
c
t
u
r
eh
a
sbeenimprovedande
x
p
a
n
d
e
d
. However
,we s
e
et
h
o
s
ewho c
a
l
l
e
d“
i
n
f
o
n
n
a
t
i
o
n
ec
u
r
r
e
n
tproblemi
st
h
a
tt
h
ed
i
g
i
t
a
ld
i
v
i
d
ei
s
s
h
o
r
t
f
a
l
l
"andp
e
o
p
l
ed
o
n
'
tu
t
i
l
i
z
et
h
ei
n
f
o
n
n
a
t
i
o
nd
e
v
i
c
e
sc
o
m
p
l
e
t
e
l
y
.Th
w
i
d
e
n
i
n
gi
nJ
a
p
a
n
.Networks
y
s
t
e
mi
sneededw
i
t
hwhichanyonecang
e
ti
n
f
o
n
n
a
t
i
o
ne
a
s
i
l
yr
e
g
a
r
d
l
e
s
sofc
o
n
d
i
t
i
o
n
s
andd
i
s
a
b
i
l
i
t
y
.I
n也i
spapeζwep
r
o
p
o
s
eamovementr
e
c
o
g
n
i
t
i
o
nmodelandan
e
t
w
o
r
ki
n
t
e
l
l
i
g
e
n
c
e
.Th
emovement
r
e
c
o
g
n
i
t
i
o
nmodeli
sa
b
l
et
or
e
c
o
g
n
i
z
ep
e
o
p
l
e
'
si
n
t
e
n
t
i
o
nandd
i
s
a
b
i
l
i
t
y
.百l
en
e
阿o
r
ki
n
t
e
l
l
i
g
e
n
c
ei
sa
b
l
et
os
h
a
r
e吐l
e
i
n
f
o
n
n
a
t
i
o
nd
e
r
i
v
e
dfrommovementr
e
c
o
g
n
i
t
i
o
nmode
.
lAndwec
o
n
s
t
r
u
c
tr
e
g
i
o
n
a
ln
e
t
w
o
r
ki
n
f
o
n
n
a
t
i
o
ns
y
s
t
e
maimed
a
tr
e
l
i
e
fands
a
f
e
t
yimprovemen
t
.
KeyWords: R
e
l
i
e
fandS
a
f
e
t
yNetworl
くS
ystemo
fArea,NetworkI
n
t
e
l
l
i
g
e
n
c
e,A
c
t
i
o
nR
e
c
o
g
n
i
t
i
o
n Model,
HumanSupportSystem
1)首都大学東京システムデザイン学部, F
a
c
u
l
t
yo
f
S
y
s
t
e
mD
e
s
i
g
n,T
o
k
y
oM
e
t
r
o
p
o
l
i
t
a
nU
n
i
v
e
r
s
i
t
y
NECS
o
f
t
,
L
t
d
3
) 附A
CCESS開発本部, ACCESSC
o
.,Ltd
.,
4
) 首都大学東京都市環境科学研究科, G
r
a
d
u
a
t
eS
c
h
o
o
l
so
f
U
r
b
a
nE
n
v
i
r
o
n
m
e
n
t
a
lS
c
i
e
n
c
e
s,T
o
k
y
oM
e
t
r
o
p
o
l
i
t
a
nU
n
i
v
e
r
s
i
t
y
2
) NECソフト鮒,
都 市 科 学 研 究 第 l号
32
2007
トワーク上にある情報の中から必要な情報を使うことが
1.はじめに
できる。そこでネットワークオントロジーを用いて人間
の必要とする情報を自動的に提示することのできるネッ
現在、 IT技術の著しい発展により様々な情報があふ
トワークインテリジェンスを構築する。
れている。しかし、 IT機器を使用することのできない
ネットワークオントロジーについて説明する。人聞が
人達はこれらの多大な情報を有効に活用することができ
対話によって知識を共有するように、コンビュータが知
ず格差が進んでいるのが現伏である。また、自動車運転
識を共有する際にも知識を共有するためのプロトコルが
時にも IT機器の利用は制限される。そこで運転者に
必要となる。このプロトコルをネットワークオントロ
とって最も必要で、ある見えない箇所の情報を得ることを
ジーと呼ぶ。ネットワークオントロジーによって複数の
可能とするネットワークインテリジェンスと意図認識機
コンピュータは知識を共有することが可能となる。
構における事例ベースの獲得を提案する。しかし情報過
オントロジーとは哲学用語で「存在に関する体系的な
多は運転者の混乱を招いてしまう。そこで情報過多を防
理論(荷主論)
J 品、う意味であるが、本研究におけるオ
ぐため、音声と画像による警告の認知科学的手法に基づ
ントロジーとは、我々の共有する概念体系を工学的に取
いた提示方法の獲得1)、さらにネットワークインテリ
り扱うオントロジーを指す。コンビュータが人間と共通
ジェンスと意図認識機構、認知科学的手法に基づいた提
のオントロジーを持つことで、コンビュータは人間を理
示方法を用いて実車への適用とマルチプラットホームな
解し、この理解に基づいて人間の状況に応じた適切な反
提示方法において有効性を示す。
応の形成が可能となる 2)。
(わ一(ウ品)
2
.ネットワークインテリジェンス
2
.
1 ネットワークインテリジェンス
ネットワークインテリジェンスは機器同士がお互いの
状況や知識を共有することで利用者の必要とする情報を
提示することができる。街中や車に設置するカメラデバ
イス、 PC、無線 LANからなる端末を i
s
p
o
tと呼ぶ。}s
p
o
tにはラスムッセンの知識階層モデ、ルによる知能が
入っており、ここです蔓得したオントロジーはネットワー
クオントロジーによって i
s
p
o
t同士に共有される(図1)。
ネットワークオントロジーを用いることで、端末はネッ
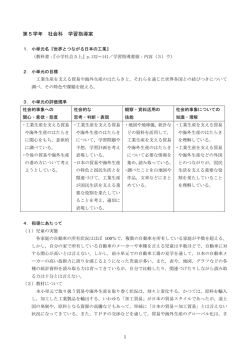
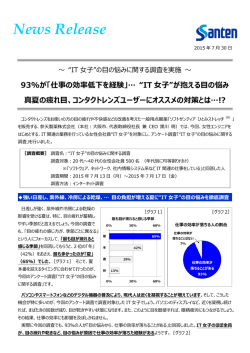
図2 ラスムッセンの知識階層モデル
オントロジーを獲得する手法としてラスムッセンの知
識階層モデ、ルを用いてボトムアップ的にオントロジーを
構築してして。図 2のようにラスムッセンの知識階層モ
デ、ノレは知識、ノレール、スキルの 3つのベースで構成され
る階層構造である。感覚から入力された情報はそれぞれ
の層によって処理され、動作となって出力される。人間
のオントロジーが上位層の群知能に形成されることでコ
ンビュータは人間の動作や状況を理解することができ
る。ボトムアッフ。的に知識を獲得する手法は次節で、説
明する。
図1 ネットワークインテリジェンス
山口・玉井・梅田・秋山:安心安全防災地域情報ネットワークシステムと応用
2
.
2 双方向連想記憶とファジィ連想記憶を用いた意
図認識モデル
3
3
中段の問、及び中段と上段のとの間で反響動作を繰り返
し、活性値分布がコンテキストに矛盾しない状態に収束
本研究ではボトムアッフ。的に知識を構築する事例とし
することで認識結果を得る。ここでコンテキストとは各
て運転者の意図認識に適用する。意図認識機構は図 3に
運転行動の事例から得られた標尊がターンで、パターン
示すように 3層の階層モデルで表される 3---{))
に似た各系統情報の特徴の組み合わせは促進されるのに
対し、パターンに合わない特徴の組み合わせは抑制され
LEFT S1RAlGHTR[GHT
寸一一一一歩
る
。
e
父c
l
t
e釘l
e
n
t
運転行動の学習されていないデータをこの意図認識モ
AZ
うじてで党賢官3
3
T
i
t
i
r
;
騨耕輔瞳朝関静昭輔輔
¥11 ¥1
1 ¥11
匝 : g ] 亙E
直u
エ
仁
平
岩
こ
瓦X
二
市
c
6
i
L
2
R
e
c
o
g
n
i
t
i
o
nR
e
s
u
l
to
fu
s
i
n
gC
o
n
t
e
x
t
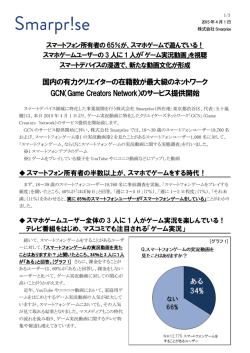
デ、ノレに入力した時に、コンテキストを用いずに得られた
結果が図 4である。この結果では中段ノードの活性値分
布があいまいでどの運転意図かを判断できない。 BAM
の反響動作によりノードi
舌性値分布はLEFT
に収束する。
このように入力値キ最初の活性状態が暖昧な場合も、反
響動作により活性値分布はコンテキストに依存した状態
に収束する叫,へ
LE
;
FT S1RAlGHTR[GHT
寸
一
一
一
一
一
一
'
e
x
口t
e釘l
f
n
t
図3 意図認識結果(コンテキストあり)
以下に顔の動作、車両の速度、位置情報から運転意図
の直進・右折・左折の 3基本運転行動意図の認識を行う
意図認識モデルについて説明する。特徴量として前記へ
3系統(顔の方向情報、車両の速度、車両の位置情報)
の情報から各情報の特徴量をN(Negative),Z(Zero),P
(
P
o
s
i
t
i
v
e
)などのファジィラベルのメンバシップ値で、表
現する。モデ〉レ中段には学習過程で使用する事例を表す
事例ノードを表す。 N個の事例に対し、 3運転行動を学
1
0 1
0Ang
l
e
D
r
i
v
e
r
' h四 d
m
o
t
担岨
,
1
0
勾
益
[
m
!
h
R
e
c
o
g
n
i
t
i
o
nR
e
s
u
l
to
f
u
s
I
n
gC
o
n
t
e
;
.
,
.
i
図4 意図読購結果(コンテキストなし)
習するので、合計 3N
パターン学習する。さらに各系統情
報にわけで事例ノードを配置する。部位ごとに分ける理
2
.
3 事例ベースを用いた意図認識システム実験
由は運転行動意図が一定パターンとして表現されるので
7人分の運転データ(顔の方向情報、スピード、交差
はなく、各系統情報の多様なパターンの組み合わせから
点までの距舶を元にメンバシッフ。関数を生成した。メ
構成されるからである。各系統情報の特徴が入力された
ンバシップ関数を図 5に示す。
時、中段で、はもっとも近い特徴を持つノードがもっとも
強く j
剖割七される。活性値分布により、各パターン毎に
どの事例が近いかわかる。しかし、中段に現れる活性値
だけで運転行動を特定することはできない。この問題は
コンテキストの導入により解決される。最上段は運転行
動を表すレイヤであり、直進・右折・左折に対応する 3
つのノードからなり、中段のすべてのノードと結合して
いる。この結合は学習データを最下段に与え、中段に現
れた活性値及び上段に与えた耕市をもとにへブ学習によ
り得られる。このモデルは事例から運転行動をファジィ
集合として記憶後、入力を与えると下段と中段の下段と
図 5 三角形型メンバシップ関数
都市科学研究
34
第 1号
2007
入力された情報からメンバシップ値を生成する 例え
O
ば、顔の方向情報が 8、スピード 1
5、距離 8の時に、メ
ンバシップ関数からそれぞ、れのメンバシップ値は図 6の
直は中間層へ
ように生成される。ここでのメンバシッフ1
と受け渡される。本稿では表 lに示すように日本人 7パ
ターンの特徴ある基本運転行動データを用いて実験を
行った。これらの事例を図 3に示す中間層に蓄積した。
事例は、 headmotionをさらに左方向に加ge,middle,
s
m
a
l
l
、右方向に l
a
r
g
e
,m
i
d
d
l
e
,s
m
a
l
lと6段階に分割した。
ここでメッパシッブロ値から最も近い事例が適用され、意
電気自動車の
位置情報
図として出力される。
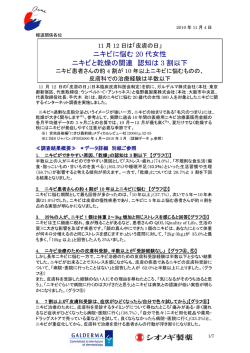
図 6 意図推論モデルと実験構成図
表 1 運転行動と意図
2.
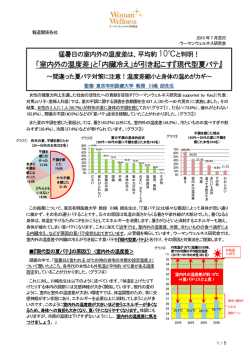
4 事例ベース推論による意図認識実麟課
意図認識実験を行う前に予備真験を行い、特徴のある
7人分の学習事例を得た。これらの学習事例の数と認識
率の結果をグラフ 1に示す。認識率は未学習の運転動作
データを入力した時のものである。 7人分の事例を学習
させた後の認識率は左折88%,直進95%,右折86%で
あった。
ぬs
t
∞
l
制
6
0
4
0
。
泊
、
戸
m
i
d
d
l
e
f
a
s
t
f
a
s
t
m
i
d
d
l
e
m
i
d
d
l
e
m
i
d
d
l
e
r
i
g
h
t
r
i
g
h
t
r
i
g
h
t
r
i
酔t
r
i
g
h
t
r
i
g
h
t
r
i
g
h
t
-HH
m
i
d
d
l
e
f
a
r
n
e
a
r
n
e
a
r
n
e
a
r
m
i
d
d
l
e
m
i
d
d
l
e
ロ
凶
。
。
。
﹄
。5﹄ロ。
6
G
A一
LD-E
一F一
B 戸一
m
i
d
d
l
e
s
m
a
l
l
m
i
d
d
l
e
s
m
a
l
l
m
i
d
d
l
e
m
i
d
d
l
e
s
m
a
l
l
d
2 3 4
6 7
l
1
l
.
l
l
1
U
:
まo
f
i
n
咽I
悶
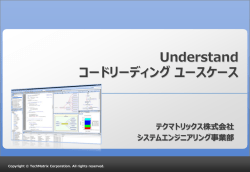
カメラを使ったステレオ視キ涯転者の顔の方向情報、
グラフ 1 認識結果
車両制御用マイコンからの環境情報を取得し意図推論を
行う。今回は見通しの悪い道路で、実験を行った。
車両は交差三転に向かつて直進する。この時の車両の位
置情報は交主転に設置されているステレオ視システムに
3
. 認知科学的手法に基づいた危険警告システム
よって取得する。同時に運転者の顔の方向情報、車両の
速度情報を取得する。これらの情報を入力とし、ファ
自動車に搭載された無線受信システムを交惹有、に設け
ジィ連想記憶システムを用いて意図指命を行う。出力は
た。情報送信システムの範囲内に進入した場合に、交差
運転者が右に曲がろうとしているのか直進しようとして
点付近の自動車側から確認されない物体の状況を運転者
いるのか左に曲がろうとしているのかといった意図を認
に情報提示するシステム(図7)のプロトタイプを作成
識する。また、学習事例を増やすことにより認識率の向
した7),8)。
上を図る。そのシステムを図 6に示す。
危険表示を提示する時間を検証するために次のような
実験を行った。
山口・玉井・梅田・秋山:安心安全防災地域情報ネットワークシステムと応用
1
司
鍵盤醤璽
榊
加
融
竃
、
,
サーバー
図7 探知警告システム
3
5
守
ー
1
図8 シミュレーションのための VTR撮影システム構成図
宇都宮大学の認知科学を専門としている阿山研究室と
似的に運転している環境を作った。自動車が交主点に入
共同実験を行い、シミュレーションと実験により、最適
4,
6秒前に「人が来ますJ という音声を提示す
る 0,2,
な表示内容と提示する時間を検証した。
る
。
実験では「人が来ますj とし、う音声提示を用いて、シ
結果を次項に示す。
ミュレーションと実験により危険提示する時間を評価し
た
。
3.2 シミュレーション実験結果
グラフ 2,3,4からは人の位置によっても提示する時
3
.
1 認知科学的手法による危険警告手法の2
富尋
交差色点に設置された 2台のステレオ視システムから歩
間に影響がある事が分かった。グラフ 3,4からは人の
位置と音声提示時間は比例している事が分かる。
行者と自動車の位置情報を得る。さらに頭上のカメラで
右折
運転者の顔の方向情報、ダッシュボード上のカメラで運
25
転者から見た映像を撮影した。
20
実験内容は見通しの悪し、 L字路で歩行者と自動車(普
通自動車)が出会い頭で、出会ったとき、歩行者が交差点、
から 2m前の地点で、出会ったとき、 4m前の地点、で出
醤
15
叩i
連10
ち
A守
3
開はい
ー
ま
守
一
一
小
E疋
4
日
日
口
一
- tF
影し、シミュレーションによりどのようなタイミングで
﹂
。
会ったときの 3シチュエーションを右左折時について撮
6
危険提示するのが効果的であるかを検証した。
シミュレーション出荷s
宮大判可山研究室で行われた。
左折
スクリーンにダッシュボード上から撮影した映像を流し、
25
3つの人間叫立置において車が交差点に入る 0,2,
4,
6
20
秒前に音声による粗食提示を行い、 2関3
皆(適切である、
適切ではない)の主観評価ドを行った。
図 8に示した人の歩行者の位置が 1,2,3における右
左折時の映像を撮影した。
映像はダッシュボード上のカメラ映像と運転者の頭上
カメラ映像の 2つである。この映像を使い阿山研究室で
シミュレーションを行った。
シミュレーションの内容:スクリーンに撮影した映像
を流し、被験者はハンドノレデバイスを操作することで擬
説得
目
日
を
誌 1
0
5
口
。
2
3
-4
-6
音声提示時間
グラフ 2 右折時、左折時での評価 r
適度」の解答回数
-3、-4、-6秒で音声提示
36
都 市 科 学 研 究 第 1号
2007
グラフ 5,6は基準点を交差点を曲がり始める時聞か
人1(右)
話回出岬睦
富司自白日目
0
人のアクセルを踏んでいる時間
ら9秒前とし、被験者1
とブレーキを踏み始めた時間の平均と標準偏差のグラフ
である。右左折両方とも人 l、人 2、人 3と平均から見
2
3
.
.
I
J
<
l
菅芦提潤寺間
んでいる時間は短くなり、ブレーキを踏み始める時間は
早くなる。
人2
ただし、グラフ 8に示すように 6秒に関しては人に
30
25
2
話2
0
~
ても分かるように、音声を早く与えるほどアクセルを踏
よってばらつきがあり、あまり早く提示し過ぎると運転
1
5
撞"
に影響を及ぼさない人もいる九
2
3
4
6
音声提示時間
.
.
"
n
:均‘、梶本..・ a
.Á' 宇崎・~,ドa ・・ a
巨至E王五三三三~
巨至'??t! I~ 三-'1~-王]
雷同信示腎冊
音図..孝鱒聞
人3(
右)
ぷ
信
00
4
0
.
.
.
.
I
J
~
--
・,
E
e
.
a
ZE 諸国市叩
長田坤盤
~
~
音声埠刊寺間
グラフ 3 右折時の人の位置の違いによる適度以外の回答数
(やや)早い-早いとやや早いの合計数(白田)
(やや)遅い.遅いとやや遅いの合計数(印回)
IOJJH6
長。桝刊
人1(左)
説国帥粧
お泊箆町市市
50
2
3
4
6
グラフ 5 右折時のアクセルを踏んでいる時間とブレーキを
踏み始める時間の平均と標準偏差
音声提示時間
・・
;
f
.
.
.
.
.
.
!
I
!
人2
(左
〉
'^,写闘0
山 町 山 出
4
E豆五亙こ玉三五王]
匡霊王豆互三三五三E
3
5
8
0
揺 25
@]20
~
1
5
"
5
2
3
4
6
4
6
音声提示時間
町叩
e
a
E
議回坤盤
zm押 部 即 時 叩
人3
I
A
J
50
一
宮
3
音声提示開閉
・
.同
・
R
グラフ 4 左折時の人の位置の違いによる適度以外の回答数数
(やや)早い・早いとやや早いの合計数(切回)
(やや)遅い:遅いとやや遅いの合計数(回国)
・
b
・
4
悼
肘 帽
グラフ 6 左折時のアクセルを踏んでいる時間とブレーキを
踏み始める時間の平均と標準偏差
山口・玉井・梅田・秋山:安心安全防災地域情報ネットワークシステムと応用
37
う。そこで歩行者の位置を交差点から 4
m'こ固定し、音
Rブ Lーキ
。
1
1
:
3
1
声提示時間を変化させて実験を行った。
被験者一人当たりに行った 1
2の音声提示パターンを以
O
'
1
0
:
0
S
0:08:~*
6
4
問
置酋品市富
。
下に示す。
0
:
0
'
:1
:
2
:
右折:人なし、出会い頭 (
0秒
)
、 2秒
、 3秒
、 4秒
、
守
'
0
.
0
4
-6秒
0
:
0
1:2~
左折:人なし、出会い頭 (
0秒
)
、 2秒
、 3秒
、 4秒
、
0,00:00
3
春宵蝿示暗闇
ιヌL キ
6秒
6
回行い、
このような実験を 8人の被験者に対して計'9
5段階(早い、やや早い、適度、やや遅い、遅い)の主
観翻面を行った。
0
.
0
8
.
3
3
システムは図 9に示すように、各地点にパイロンを置
証明
5
な
0
画書‘暗躍
0
'
0
7
'
1
2
き、電気自動車の側面に搭載しているカメラがそのパイ
0
:
0
4
:
1
9
ロン(ステレオ視システムから出力されるデータが天候
0
:
0
0
:
0
0
-3
キ輝度によって不安定になるため、より正確な時間に危
畜声蝿宗鶴田
険表示するためパイロンを使用した)をトラッキングし
グラフ 7 右左折時の音声提示時間毎のブレーキを踏み始める
時間
た時、音声提示アプリケーションに信号が送られ音声提
示を行う。
Rアクセル
。
I(
)
.
0
5
0
:0838
69
41
開
Ga
M
mZA留
,膏 戸 jj示 曾 圃
Lア ヴ セ "
。
10'05
。
08:38
h
u
・
岱
4
0
:0
7:12
41
59
00
匝官五時盟
n
.
2ち3
0
:0
1'
2
6
O
:O
(
)
.
O
O
,-
園 9 実機適用実験システム構成図
膏戸銀示野圃
グラフ 8 右左折時の音声提示時間毎のアクセルを踏んでいた
時間
4.2 実機適用実験結果
シミュレーション結果と実験結果が非常に似た軌跡を
描いている。実験結果において一部、シミュレーション
4
.認知科学的危険警告における実機適用実験と
マルチプラットホームな提示システムの実証
結果と右左折データが反転している部分がある。これは
音声提示が適切に行われなかったからで、あると考えられ
る。この点に関してはサンプルを増やしていく事で修正
4
.
1 実機適用実験システム
シミュレーションによる結果をもとに、実験で涯転中
の運転者に音声提示を行った。今回は第二実験結果の人
m)の時に関して検証実験を行
の位置が 2(交差三点から 4
されていくと思われる。
結果から音声提示は電気自動車が交君主点に入る 2
"
"
'
4
秒前に行うのが適切であると分かる。
都 市 科 学 研 究 第 1号
3
8
2007
人 2 右 左 折 fシ 主 ュ レ ー シ ョ シ 〕
玉川田畑
100
80
60
40
20
。
-3
-4
一日
音声提示時間[秒]
人 2右 左 折 〈 実 験 )
i
ヒューメインピーヲル表示システム l
100
80
~
F
Z
E
40
地上の吉田t
こ接続すると歩行者仁
仁ューがンピ寸l
附 倭 乱 てL
、ることを表示
5凶の力r:;<ラの視野内仁入るt
,
tユーメイ'::K--'J)~がきら仁接動力し渇こ庄
2段階で表示し注意を促す
20
-2
-3
-4
盲声提示時間[秒]
-6
回 10 赤汗若手へのマル干ヴ弓吋トホーム t~借除梶宋ごノス子ム
グラフ 9 人 2右左折時において音声提示時間毎の適度と回
答した割合
4.3 ネットワークインテリジェンスを用いたマルチ
フ。ラットホームな危険提示
4
¥
3
.1
>
く4
.1>の音声のみの危険提示では「人聞が交主点
く
歩行者表示システム
付近にいるのは分かるが、どの程度危険なのか分からな
地上の1-:5問主に接続すると運転者仁
コ
い
るLとを表示
歩行者が接近し 1
問問ゆ力I
r:;<'ラの視野内仁入ると
歩行者がき磁こ接近している己とを
2段階で表示し注意を促す
いJ
、「干見覚的な危険提示がないと不安な精神状態になっ
てしまう」とし寸意見があった。そこで音声提示に加え
マルチプラットホームな危険表示を用いて危険提示を行
フ
。
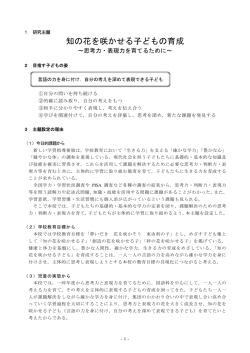
図1
1 運転者へのマルチプラットホームな危険提示システム
システムは図 1
0
、1
1に示すように交主点に i
s
p
o
tを設
・
s
p
o
tと無線し町、 GPSキットを設置する。
置し、車上に i
2に示すように状況に応じてリアルタイムに「大き
図1
歩行者はPDAと無線LAN、GPSユニットで構成される
い画面には周辺の情報Jを「小さい画面には運転者が必
.
3
>の意図推論モデ〉レから出
移動端末を持っている。く2
要としている交差点の詳しい'情報Jが提示される 8),9)。
力される意図は i
s
p
o
tの知能であるラスムッセンの知識
また、歩行者が所持している PDA
へはフォアグラウン
階層モデルの上位層の群知能にオントロジーとして形成
が提示され、自動車の有無
ドとして交惹長の詳しい↑静R
される。 i
s
p
o
tにボトムアッフ。的に形成されたオントロ
と同時に運転者の意図を提示する。
ジーや運転者の状況はネットワークオントロジーによっ
て路上のi
s
p
o
tへ知識共有される。路上の i
s
p
o
tは歩行
-危隆室主
者が接近すると自動的にネットワーク上から必要な情報
を収集し、状況において最適な反応をする。このとき歩
行者へ対して自動車の有無と運転者の意図を提示する。
同様にネットワークオントロジーによって歩行者の状況
を路上の 1s
p
o
tから車上の i
叩o
tへ知識共有を行い、運転
・
者に対しては歩行者の有無を提示するネットワークイン
テリジェンスの構築を行った。
「マルチプラットホームな表示と音声」と「音声の
みJで危険提示した場合の評価実験を行い、それぞれの
危険表示システムの有効性を検証した。
国1
2 マルチプラットホームな提示
山口・玉井・梅田・秋山:安心安全防災地域情報ネットワークシステムと応用
39
さらに危険提示による有効視野の減少を抑えるために
ノミーに警告するシステムを想定し、認知科学的手法にお
比較的に弱い危険を前もって弱く表示しておくことで
ける提示方法をシミュレーションにより獲得した。さら
(状況によって色が変化していく)、パックグラウンド的
にネットワークオントロジーを用いたネットワークイン
に頭に残り、本当に危険な場合にも俊敏な対応がで、きる
テリジェンスを構築し、実車への適応とマルチフ。ラット
ようになる。
ホームな提示による有効性を示した。
次項に音刊面結果を示す。
この研究は東京都傾斜配分哨別研究費によって行われ
たものである。
4.
4
マルチフ。ラットホームな危険提示実樹吉果
被験者 10名に「音声のみJ による危険提示の場合と
「音声とマルチプラットホームな危険表示」による危険
5:有効、 4:やや有効、 3:普通、
提示の場合を 5段階 (
2
:やや有効で、ない、 1:有効で、なし、)で主観評価した、
結果は以下のようになったo
参考文献
1)阿山みよし、池上誠,長谷川光司白藤美恵春日
正男:I
カーブ区間と直線区間での余剰注意容量の比較J
,
シンポジウム「ケータイ・カーナビの利用性と人間工学」
p
p
.
5
5
5
8(
2
0
0
4
/
3
/
1
7
3
/
1
8
)
2
) 山口亨,増田俊輔,村上洋:I
人工オントロジーを用
音声のみ 5:0名
、 4:2名
、 3:7名
、 2:1名
、 1:0名
音声と表示 5:1名
、 4:5名
、 3:3名
、 2:1名
、 1:0
いた人間中心型自律移動エージェントシステム J
, 日本知
能情報ファジィ学会誌, Vo1
.
16,
N
o
2
.,p
p
.
506
0(
2
0
0
4
)
3) 山口
名
亨、武田康宏:I
ヒューマンビークルにおける事
例ベースによる意図認識J
,第四回ファジィシステムシン
音声のみ(平均):3
.1
ポジウム講演論文集, p
p
.
2
792
8
0
(
2
0
0
39
/
8
9
/
1
0
)
音声と表示(平均):3.6
音声のみの平均:3.1、音声と表示 3.6となり車内シ
ステム(音声と表示による)の有効性を示す事ができ
た
。
.Chen
,Y
.TakedaandJ
.J
i
n
g:守n
t
e
n
t
i
o
n
4) 工 Yamaguchi,D
c
¥
e
",
R
e
c
o
g
n
i
t
i
o
nU
s
i
n
gC
a
s
e
b
a
s
eLeamingi
nHumanV
e
h
i
I
S
I
S2
0
0
3,J
e
j
u
,
Kore
,
app.
1
1
O
1
1
3(
2
0
0
39
/
2
5
9
/
2
8
)
.O
h
a
s
h
i
,T.YamaguchiandI
.
Tamai“
:HumaneAutomotive
5) K
音声と表示では運転しずらいという意見もあったが、
交惹長の状況が表示されるのは音声のみの場合と比べ安
心感があり有効であると評価できる。
r
i
v
e
rI
n
t
e
n
t
i
o
nR
e
c
o
g
n
i
t
i
o
n
"
,SICEAnn
u
a
l
S
y
s
t
e
mU
s
i
n
gD
C
o
n
f
e
r
e
n
c
e2
0
0
4,
p
p
. -
(
2
0
0
4
)
6) T
.Yamaguchi,
S
.Matsud
,
aK
.O
h
a
s
h
i
,
1
.Tamai
,
M.Ayamaa
n
d
F
.Harashima:
凶a
nI
n
t
e
n
t
i
o
nR
e
c
o
g
n
i
t
i
o
n
"
,WorldCongresson
a
n
dP
e
d
e
s
(
2
0
0
4
/
3
/
1
7
3
/
1
8
)
図音声のみ(車内シス
テム)
国表示+音声(車内
システム)
斗つリ内乙
議拘固
QU7jhbRJA
i
c
h
ip
p
.1
l5
1
1
8
I
n
t
e
l
l
i
g
e
n
tT
r
a
n
s
p
o
r
tS
y
s
t
e
m Nagoya A
7) T
.Yamaguchi
,
T
.Y
o
s
h
i
f
u
j
i
,
K
.0加 s
h
ia
n
dM.勾r
a
m
a
:唱
,y
e
C
o
n
t
a
c
tCommunicationi
nHumanV
e
h
i
c
¥
e
"
,
I
S
I
S2
0
0
3,J
e
j
u,
K
o
r
l
伺, p
p.
12
2
1
2
5(
2
0
0
39
/
2
5
9
/
2
8
)
41
8) 山口
亨,大橋邦博:I
ヒューマンビークルにおけるア
門)
イコンタクトコミュニケーションJ
,第四回ファジィシス
3
4
5
評価
グラフ 10 マルチプラットホームな危蹴訴システム開画課
5
.結 言
学習事例の増加により認識率が向上し、帰納的学習が
行われたことを示している。このことにより事例ベース
による意図認識樹曹の運転者意図推論の有用性を示し丸
また、見通しの悪い交主点での音声と表示によりドライ
テムシンポジウム講演論文集, pp.
12
1
1
2
2(
2
0
0
39
/
8
9
/
1
0
)
© Copyright 2026 Paperzz