1
システム/制御/情報,Vol. 0, No. 0, pp. 1–??, 0000
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
解
説
動的計画法を用いた動物行動の最適理論
— 親子間闘争の数理モデリング
瀬野
裕美*
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
1.
はじめに
9) を参照)が,動的計画法による数理モデリ
動物の行動を科学的に考察する際の立場は
様々である.それだけ動物の行動は多様な側
面を持ち,科学的探究の対象としておもしろ
い.動物行動の数理的・理論的な研究として
は,ゲーム理論や最適制御理論を応用した数
理モデリングによるものがあるが,本稿で紹
ング,数理モデル解析の枠組みはもう一つの
有効な方針となっている.もちろん,動物行
動の最適性の研究におけるこれら二つのアプ
ローチは,完全に異なるものでも,独立なも
のでもなく,近年,これらを結びつけた理論・
数理生物学の研究も発展しつつある 5) .
この数理モデリングの特徴の一つは,幾度か
介するのは,将来期待される利得を加味して
現在の行動を最適に決める,という観点から,
数理生物学において,動物行動を数理的に考
察する際のダイナミック・プログラミング(動
的計画法)を応用した数理モデリングによる
数理的研究例である.特に,この数理モデリ
ングの具体例として,親の繁殖に関わる行動
である,親の子離れ,つまり,親による子の世
話の終了のタイミングに関して行った数理モ
繰り返される行動の連鎖を扱うところにある.
そして,
「今」の行動の最適化を図る上で,
「将
来」期待される利得を問題にする.それは,た
とえば,現在の持ち金からいくらかをギャン
ブルに投資する場合,その投資額をどう決め
るかについて,それから後のギャンブルから
期待される利得が現在の投資額によってどの
ように変わるかを考慮することに相当する† .
さて,そのような行動の連鎖において,
「今」
デル研究 11) を紹介する.
2.
の行動の「最適化」を考えるわけであるが,常
行動選択の連鎖の数理モデリング
に問題になるのが,
「何を最適の基準に用いる
動物行動に対する,ダイナミック・プログラ
か」である.この「何を最適の基準に用いる
ミング(動的計画法)を応用した数理モデリ
か」に関して,しばしば構成されるのが,いわ
ングは,Mangel と Clark が 1988 年に書いた
ゆる「評価関数」である.動物行動の問題を含
8)
によってその応用手法が整備され,その
む生物学の問題に関しては,しばしば,それ
後,様々な動物行動の適応性に関する考察にお
は適応度関数 (fitness function) と呼ばれるも
いてその数理モデリング,数理モデル解析が応
のになる.そして,この関数の値によって与
本
用されてきた.理論・数理生物学においては, えられる適応度 (fitness)(上で述べた「利得」
動物行動の最適性は,しばしば,ゲーム理論の
にあたる)が生物学的に何を「意味するか」が
枠組みで考察される(たとえば,参考文献 6),
数理モデリングにおいて最重要である.適応
* 奈良女子大学 大学院 人間文化研究科
Key Words: dynamic programming, mathematical biology, animal behaviour, optimal theory.
–1–
†
したがって,ここで「動物行動」の対象となる動物生態に
は,たとえば,繁殖に関する時間的スケジュールや(仔数
などの)量的スケジュールも含まれている.
瀬野:動的計画法を用いた動物行動の最適理論
度は,自然淘汰に対する,個体の有利・不利の
2
進むことができる.
程度を表す尺度で,ある個体のもうけた子の
動物行動それぞれがそれぞれの特異性を有
内,繁殖可能まで成長できた(できると期待
しているため,数理モデルの具体的な構成方
される)ものの数が大抵の場合に用いられる. 法に関しては,一般的な「マニュアル」のよ
実際は,適応度として生物学的な何を取り上
うなものがあるわけではないが,上述のアル
げるかは,研究の対象となる動物行動によっ
ゴリズムに関して,ダイナミック・プログラ
て異なり得るし,同じ動物行動を対象にして
ミングを応用した数理モデリングを採用すれ
行動の最適性を議論している複数の研究にお
ば,特徴的に,連鎖する最適行動を将来から
いてすら扱っている適応度が同じ生物学的意
過去へ向かって(数理的に)決めてゆく後進
味をもつとも限らない.適応度として生物学
漸化式 (backward recurrence equation) がし
的な何を取り上げるかは,対象とする生物現
ばしば現れる(具体的には後述の研究例を参
象の科学的研究における研究上の観点や立場
照).既述のように将来期待される結果を加
を表しているといってもよい.異なる観点や
味して現在の最適行動を決定しようとするわ
立場からのより多様な研究が,動物行動の科
けであるから当然とも思えるが,この後進漸
学的研究をより実り多く発展させてきた.
化式がゆえに数理生物学関連のこのタイプの
数理モデリングにおいて適応度関数を具体
数理モデルの数理的解析はコンピュータによ
的に構成するためには,研究対象とする個々
る数値計算が主流かのように考えられている
の生物現象に関わるいくつかの仮定を整理す
節がある† .実際,Mangel と Clark の本 8) に
ることが必要なのは言うまでもないが,本稿
おいて解説されているダイナミック・プログ
で問題にする動物行動の連鎖の数理モデリン
ラミングによる動物行動に関する数理モデル
グにおいては,
「どのくらいの」長さの連鎖を
の数理的解析のすべてが数値計算によるもの
考えるかが仮定において明確にしておくべき
であり,本稿の数理モデリングのトピックで
最も重要な項目の一つである.数理的研究に
もある親による子の世話期間の問題に関する
おいては,無限の連鎖を考え,構成される数
Clark & Ydenberg による動的計画法を応用し
理モデルの数理的解析を単純化し,より明確
た研究 2) においても,数値計算によるモデル
な数理的結果を導くことによって,本質的な
解析の結果を用いた議論が行われている.数
1)
生物学的考察を展開する方針も可能である . 値計算のためには,数理モデルに含まれる様々
ただし,そのような場合,当然ながら,研究
なパラメータに具体的な数値を与えてやる必
対象の生物個体の年齢や行動期間の長さがど
要がある.しかし,それらの数値を「適切に」
のように最適行動に関わるかについての議論
決めてやることが常に可能とは限らない.そ
はできない.生物個体の年齢や行動期間の長
れは,観測データの欠如または低い信頼性に
さを数理モデルに導入することは,たとえば, よる場合が多い.したがって,数値計算による
繁殖年齢(繁殖活動のできる初齢と終齢)や
解析では,欠如または低い信頼性を有するパ
繁殖期間(季節)を仮定する数理モデリング
ラメータの値について,適宜,広い範囲の値
によってなされうる.数理モデリングにおけ
をあてはめ,そのパラメータ範囲における適
るそのような仮定が準備できれば,適応度関
切な数値計算によって結果を考察する必要が
数,および,その最大(あるいは最小)化に
よって最適行動を決定するアルゴリズム(思
考過程)を具体的に構成する次のステップに
–2–
†
実際には,前進漸化式によって数理モデルを構成すること
ができる場合もあるだろうが,数理的解析が数値計算に流
れがちな理由となる解析上の難しさについては,後進漸化
式の場合と大差ないであろう.
3
瀬野:動的計画法を用いた動物行動の最適理論
ある.そのような不定なパラメータを含む数
理モデルの解析においては,特定のパラメー
af
繁殖可能齢
a σw
af + 1
タの値の組み合わせによる数値計算だけでは
十分に信頼性のある科学的な考察は期待でき
1
ts
2
T–1
T
親による子の世話
ない.一方,パラメータの値を特定しない数
(σ f, σ n)
子の独立
学的な「定性的」解析が全く不可能かという
とそうではなく,生物学的議論に足るだけの
al
繁殖期
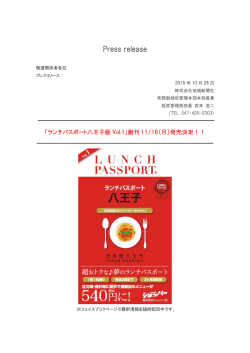
第 1図
(σ p, σ o)
解析結果を得ることも可能である.本稿で例
繁殖期における親による子の世話期間の連鎖に関する
モデリング.
述する数理モデル解析の結果はすべてそのよ
の子自身の適応度に導入すべきであるように
うな定性的解析によるものである.
思われるが,ここでは,ある親による子の世
3.
親の子離れの最適タイミングと親子間
話行動に関わる適応度に着目するが故にこの
対立
ような定義を用いることにする.つまり,子
本稿では,親による子の世話期間の長さに
関する,ダイナミック・プログラミングの考え
方を応用した適応戦略理論的数理モデリング
の具体的な過程を紹介する.
3.1
の適応度については,産まれおちてから繁殖
可能になるまでの生存確率にのみ,その個体
(子)への親の世話が関わると考えて数理モデ
リングを行う.子の生存確率において,親の
世話行動が関わるのは子が産まれおちて独立
適応度と繁殖価
年齢が a 歳の親にとっての適応度 J は,そ
(親離れ)するまでの期間である.
3.2
の齢における繁殖期および非繁殖期における
生存確率 Fp ,a+1 歳以降に期待される繁殖価
†
R,その齢においてもうけた子の適応度 Fo
によって与えられる.ここでは,親にとっての
適応度 J として,その親が残す子のうち繁殖
できるまで生き残る子の数の期待値で与えら
れるものを考える.この適応度の定義は,生
物個体は自分の遺伝子を残すことを目的とし
て行動するという利己的遺伝子†† の立場に基
づくものである.この概念に基づき,子の適
さて,ここで述べる研究で特に問題にする
のは,親の子離れ,つまり,親による子の世
話の終了のタイミング ts である.前述のよう
に,このタイミングは,子の生存率に直接関
わり,ひいては親の適応度に反映される.今,
親の行動の連鎖に関する仮定として,第 1 図
に示されるようなモデリングを考える(この
数理モデリングで用いられる変数・パラメー
タの意味は付録に後掲).
3.2.1
応度 Fo としては,生まれ落ちてから繁殖可能
になるまでの生存確率を用いる.利己的遺伝
子の概念に基づけば,子の将来の繁殖価をそ
親の繁殖価と適応度
まず,a 歳の親の繁殖価 R と a+1 歳におけ
る適応度 J の間には次のような関係式が成り
立つ:
†
繁殖価(reproductive value )は,ある齢の個体の,その
後の生涯に産む子が将来の個体群の大きさに寄与する度合
いを表す指標である.1930 年に R.A. Fisher が提出した
概念である.本稿では,ある齢の親の繁殖価は,その齢に
おいて「将来期待できる」産仔数,もしくは,より一般的
に,
「将来期待できる」繁殖成功として定義する.
††
利己的遺伝子(selfish gene )というのは,自然淘汰の単
位が遺伝子であり,生物の多様な性質は,その性質に影響
している遺伝子の生存や増殖にとって有利であるために進
化したという見方を示す表現で,R. Dokins が 1976 年
に提唱した.
数理モデリング
R(a) = σw J(ts ;R(a + 1))
(1)
すなわち,確率 σw で次の繁殖期まで生存すれ
ば,a + 1 歳における適応度 J(ts ;R(a + 1)) を
獲得できるという意味である.次に,a 歳の
親の繁殖価 R と適応度 J の関係については,
次のように定義できる:
–3–
4
瀬野:動的計画法を用いた動物行動の最適理論
J(ts ;R(a)) = Fo (ts ) + Fp (ts )R(a)
(2)
†
すこと によって,繁殖初齢までの繁殖期毎に
最大適応度を与える子の世話の終了のタイミ
この定義は,a 歳の親の適応度は,その齢にお
ングを決めてやることができる.この手順に
いてもうけた子の適応度からの寄与分 Fo と, おいて最も問題となるのは,Fo (ts ) と Fp (ts )
親がその齢(a 歳)の繁殖期を(生存確率 Fp
の具体的な関数形である.
で)生き延びて獲得する将来の繁殖による適
3.2.3
応度,つまり,繁殖価 R との和によって与え
られることを示している.
なお,a 歳の親の繁殖価 R(a) は,これらの
(1), (2) 式からも明白なように,a+1 歳以降の
期待生存確率
本節で述べる数理モデリングにおいては,
子と親の期待生存確率を与える関数 Fo (ts ) と
Fp (ts ) をつぎのように構成する:
すべての繁殖期における,子の世話の終了タイ
Fo (1)
=
ミング {ts (a + 1),ts (a + 2),...,ts (al − 1),ts (al )}
Fo (ts )
=
σoT φ(Y (T ;1))
(3)
t
s −1
σfj−1 (1 − σf )σnj−1 σoT −j+1
に依存して定まる.
3.2.2
j=1
繁殖終齢
·φ(Y (T ;j))
+σfts −1 σnts −1 σoT −ts +1
·φ(Y (T ;ts ))
ここで,個体の繁殖可能年齢が有限な場合に
ついて,繁殖終齢 al (< +∞) に至った親を考
(4)
える.繁殖終齢の意味は,その次の繁殖期以
Fp (1) = σpT σw
t
s −2
σnj−1 (1 − σn )σf σpT −j σw
Fp (ts ) =
降は繁殖ができない,という状態であるから,
将来期待できる繁殖はありえないので,繁殖
価 R(al ) = 0 である. a = al を (2) 式に代入す
j=1
ると,繁殖終齢 al の親の適応度 J(ts ;R(al ))
+σnts −2 σfts −1 σpT −ts +1 σw
は, Fo (ts ) と等しいことがわかる.したがっ
て, Fo (ts ) を最大にする ts = ts (al ) を繁殖期
(5)
(6)
ただし,これらの期待生存確率 Fo ,Fp は,と
における子の世話の終了のタイミングとして
もに親の齢 a には依存せずに定まると仮定し
選んでやれば,繁殖終齢 al の親の適応度は最
ている.(3) 式は産まれおちてから全く親に世
大にでき,最大適応度 J(ts ;R(al )) を求めるこ
話をされない子の繁殖可能になるまでの生存
とができる.求めた最大適応度を (1) 式右辺に
確率の期待値である.(4) 式の第1項の和の各
代入することにより, al −1 歳の親の(最大つ
項は,子の世話をしている親が繁殖期途中の j
まり最適)繁殖価 R(al −1) が決まることにな
日目で何らかの理由によって死亡してしまった
る.この繁殖価 R(al −1) は, al −1 歳の親の繁
場合についての,第2項は親が子の世話を止
殖期における子の世話の終了のタイミング ts
めるまで生き延びた場合についての繁殖可能
には依存しないことに注意する.この最適化
になるまでの子の期待生存確率への寄与であ
繁殖価 R(al −1) を (2) 式の右辺に代入すれば, る.(5) 式は,全く子の世話をしない親の繁殖
期間および次の繁殖期間までの間隙期間を通
結局,(2) 式の右辺は, Fo (ts ) と Fp (ts ) の線
形結合による ts の関数であるから, ts の関数
しての生存確率を与え,(6) 式の第1項の和の
として最大値を求めれば,それが,al −1 歳の
各項は,親による子の世話期間(繁殖期間の)
親について求めるべき最大適応度を与える子
j 日目において子が死亡した場合(親は子の世
の世話の終了のタイミングを導く.この手順
を(後進漸化式である (1) 式を用いて)繰り返
–4–
†
後進帰納法(backward induction )と呼ばれることがあ
る.
5
瀬野:動的計画法を用いた動物行動の最適理論
Y(t)
Y(t)
φ
Y (T; ts)
0
yc
Y1
ts
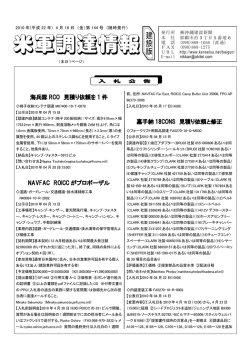
第3 図
子の体重 Y に対する最終適応度関数 φ(Y ).
話をする必要がなくなる!)を考慮にいれて,
親の生存確率への寄与を与えている.(6) 式の
第2項は世話をしている期間を通して,子が
T
Y (T; ts)
Y1
t
1
ts
T
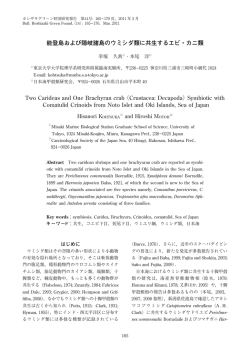
繁殖期 t 日目の子の体重 Y (t).
一般的には,親の各齢における繁殖期毎に親
の最大適応度を与える子の世話の終了のタイ
ミングをパラメータの間の関係式として具体
的に求めるのは困難である.しかしながら,
生存していた場合のそれである.
ある繁殖期に産みおとされた子で,その繁殖
期の終わりにおける体重 Y の子が,繁殖期間
後,繁殖可能個体まで成長できる確率 φ(Y ) は,
最終適応度関数(terminal fitness function)と
呼ばれ 1) ,本稿では,第 2 図で与えられるよ
うなものを考える.繁殖期間の終わりの体重
が閾値 yc を越えられないような子は繁殖可能
個体までは成長できないと仮定している.
さらに,繁殖期における子の体重増加とし
て,第 3 図に示すような,一日における体重
の増加分を定数で与える数理モデリングを考
える.ただし,一日当たりの体重増加分の大
きさが親の世話の有無によって異なる場合を
考慮に入れている.繁殖期の終わりにおける
子の体重 Y (T ;ts ) は親が子の世話を止める日
ts に依存して決まる.したがって,子が繁殖
差分 ∆Fo (n) ≡ Fo (n + 1) − Fo (n) や ∆J(n) ≡
J(n + 1;R(a)) − J(n;R(a)) の正負に関する性
質を調べることにより,任意の齢の親の繁殖
期における最大適応度を与える子の世話の終
了のタイミング t∗p の候補を絞り込むことが可
能である 11) .すなわち,∆J(1) が負の場合に
限り,その最適タイミング t∗p が1となり得,
親は産みおとしただけで子の世話はしない行
動が親の適応度を最大にする場合が起こり得
る.一方,∆J(T −1) が正の場合に限り,最適
タイミング t∗p が T となり得,親は繁殖期の終
わりまで子の世話を続ける行動が親の適応度
を最大にする場合が起こり得る. ∆J(1) が正
で,かつ,∆J(T −1) が負の場合には,繁殖期
の初日でも 最終日でもない中途の日で子の世
話を止める行動が親の適応度を最大にする.
3.4
可能個体まで成長できる確率は,親が子の世
親自身の適応度 J に反映されてくる.
親の立場からみた,子の世話の最適終了タ
イミング
第 3.2 節に述べた段階で Fo (ts ) と Fp (ts ),
J(ts ;R(a)) の数理モデリングにより数理モデ
ルが完成したことになる.この数理モデルに
関しても,
(とりわけ,子の体重増加と関数
φ の数理モデリングに依存するのであるが)
子の立場からみた,子の世話の最適終了タ
イミング
話を止めるタイミング ts に依存し,結果的に,
3.3
t
1
Y
第2 図
親から独立した後の方
が体重増加率が大きい
場合: k1 < k2
親の世話の元にある方
が体重増加率が大きい
場合: k1 > k2
ところで,産みおとされた子自身の(親の
世話行動に関わる)適応度 Fo (ts ) を最大にす
る親の世話停止タイミング t∗o (=繁殖期間に
おける親の世話期間の長さ)はどのように求
められるであろうか.実は,差分 ∆Fo (n) の解
析 11) によって,親から独立した後より親の世
話の下にあるほうが体重増加率が大きい場合
には,子の適応度 Fo は親が繁殖期間中ずっと
–5–
瀬野:動的計画法を用いた動物行動の最適理論
6
世話をしてくれる場合に最大になり,独立し
3.6
た後の方が体重増加率が大きい場合には,パ
第 3.5 節で述べたような親子間対立と適応的
ラメータに依存して,繁殖期間中間での独立
行動との間の関係についての数理モデリング
†
親子間対立の解消
が子の適応度 Fo を最大にする .これらの結
による数理的・理論的研究をさらに展開する
果から,親の適応度 J を最大にする親の世話
ことができる(例えば,参考文献 2)).この対
停止タイミング
t∗p
と,子自身の適応度 Fo (ts )
t∗o
立の結果として,いずれかの妥協が起こると
の間
考える.親の妥協とは,子の世話(授餌,授乳
にはずれがあることがわかり,しかも,その
など)を行うことであり,子の妥協とは,親か
を最大にする親の世話停止タイミング
ずれは,
t∗o > t∗p
というタイプのみであること
も明白に示すことができる
3.5
11)
らの独立を意味する.この妥協による親子間
の対立の解消(resolution)については,次の
.
親子間の対立
ような考え方(モデリング)ができる.
第 3.3 節と第 3.4 節で示された t∗p と t∗o のず
対立が継続している状況では,双方の(累
れは,親子間の対立(conflict)の原因となる. 積)コストは刻々と増加していく.今,親子間
子が世話を親にせがむ一方で,親は子の世話
の対立が起こっている繁殖期 t 日目において,
をしなくなる,という観察例はアヒルなどの
いずれかの妥協が起こった時点までにかかっ
鳥類からアカゲザル(ヒトも?
!)についてま
た子のコストを c とおき,親のコストを αc と
で数多く報告されている.このような対立が
おく.パラメータ α は親と子の立場の違いに
起こっている時期においては,対立のない時
よるコストの大きさの差を表す.本稿で述べ
期,すなわち,親の世話への子の欲求と親の世
てきた数理モデルでは,対立初期に起こる妥
話行動が合致している時期に比べて,子も親
協は親の側であると考えられる.親の妥協が
もその対立関係に対して余分なエネルギーを
起こるということは,対立の継続を選択する
費やしていると考えることができる.子は世
よりも,子の世話をすることによってそれ以
話をしたがらなくなった親に世話をせがむた
上のコストを避ける方を親が選ぶということ
めにより多くのエネルギーを必要とする(雛
であり,親の妥協が起こる時点までは,子は
鳥の親に向かってのさえずりなど).親は,例
対立を継続して親の世話をせがむ行動を選択
えば,子に世話をせがまれることによる余計
している,ということである.このことにつ
なストレスを受ける.これらは親子双方の適
いては,次のような数理モデリングが可能で
応度を下げる(適応度に対するコスト)効果
ある 3),11) .
を持つと考えてよかろう.したがって,この親
今考えている t 日目における妥協が起こった
子間対立の期間に親と子それぞれにかかるコ
時点で,親が妥協しなかった(子の世話の拒否
ストに依存して,実際の子の独立(すなわち, をする)とした場合に親が得ると期待できる
実質的な親の子離れ)が定まると考えられる. 適応度分 Dp (t;a) は次のように与えられる:
次節では,この親子間対立の結果として生起
Dp (t;a) = J(t;R(a)) − J(t + 1;R(a)) − αc (7)
する子の独立タイミングの決定過程の数理モ
デリングについて述べる.
†
第1項は t 日目に子の世話を止めてしまう場
合に期待される親の適応度であり,第2項は t
第 3.2.3 節で述べた数理モデリングでも明示したように,
本節で述べている数理モデリングにおいて,Fo は,親の
齢 a には依存しないので,子の立場からみた,子の世話
の最適終了タイミング t∗
o も親の齢 a には依存せずに定ま
る.
日目は子の世話をして次の日に子の世話を止
めてしまった場合の期待適応度である.対立
にかかったコスト分 αc を差し引く.
–6–
瀬野:動的計画法を用いた動物行動の最適理論
7
一方, t 日目における妥協が起こった時点で, 子の立場からみた最適な世話の終了タイミン
子が妥協して親から独立した場合と比べて,子
グ t∗o と常に一致し,繁殖終齢にある親は,子
が妥協しなかった(親の世話を要求する)場合
にとって最適な期間だけ世話をするのが親に
に子が得ると期待できる適応度分 Do (t;a) は
とっても最適である.なぜならば,第 3.2.2 節
同様な考え方で次のように与えられる:
で述べたように,繁殖終齢の親については,
Do (t;a) = Fo (t + 1;a) − Fo (t;a) − c
(8)
親の妥協が起こる時点では, Do (t;a) > 0 で
ある状況下で Dp (t;a) = 0 が起こっていると
いうことになる.Dp (t;a) と Do (t;a) の解析か
J(ts ;R(al )) = Fo (ts ) であるから,J を最大に
する ts と Fo を最大にするそれが一致するの
である.繁殖週齡の親とその子の間には,子の
世話の期間の長さに関する対立は生じ得ない.
要するに,親の立場からみた子の世話の最
ら,次のような時点 t∗ の一意的な存在性を示
適終了タイミング t∗p (a) は,親の齢 a の増加に
: t∗p ≤ t∗ かつ t∗ < t∗o で
従って,子の立場からみた世話の最適終了タ
すことができる
11)
あり,t < t∗ なる t に対しては, Do (t;a) > 0
かつ Dp (t;a) = 0, さらに,Do (t∗ ;a) = 0 かつ
Dp (t∗ ;a) ≥ 0.この t∗ こそが,実際の子の親離
れの日となるわけである.このとき,差 t∗ −t∗p
は親子間対立の期間の長さを表す.このよう
イミング t∗o に向かって増加してゆく.数理モ
デル解析 11) の結果,親の齢 a について,ある
閾値 ac (≤ al ) が存在し,齢 a が a < ac なる若
い親については,子の世話期間の長さに関し
て,子との対立を引き起こすが,a ≥ ac なる
に,親子間の対立に関するコストを導入する
齢 a を持つ年をとった親については,子にとっ
ことによって,実際に子が親から独立する日
て最適な長さだけ子の世話をすることが親に
が一意的に定まること,その独立までの親子
とっても最適になり,親子間対立は起こらない
間の対立期間では親が妥協することによって, ことが示される.また,第 3.6 節で述べた,対
立の解消の結果として定まる子の世話の終了
親による子の世話が実現することが体系的に
タイミング t∗ = t∗ (a) についても,t∗p (a) と同
理解できる.
3.7
様の傾向をもつ.このことは,親の齢が高け
親の齢への依存性
さて,親の繁殖可能齢が有限であり,繁殖終
れば高いほど,親子間の(子の世話に関する)
齢が存在する場合,前節までの議論は,どのよ
対立の期間の長さがより短くなることを意味
うに親の齢に依存するであろうか.この問題に
する.また,親の齢が高くなるにつれて,子
ついての考察に関しては,親の繁殖価 R(a) が
の実際の独立が遅くなることも意味している.
親の齢 a の減少関数であることが重要なキー
4.
となる.このことは,親の齢の増加に伴って,
将来,繁殖活動できる繁殖期の回数が減少し
てゆくことからも自然な要素である.本稿で
ここまで述べてきた数理モデリングによる数
理モデルの解析 11) の結果,親の齢に依存した,
親の立場からみた子の世話の最適終了タイミ
ング t∗p (a) は,親の齢 a の増加に従って,単調
非減少であることを示すことができる.
とりわけ,繁殖終齢 al の親の立場からみて
最適な子の世話の終了タイミング t∗p (al ) は,
おわりに
ダイナミック・プログラミングによる動物行
動の数理モデリングは決して難しくない.ま
た,複雑でもない.解析は困難が伴うことも
多いが,動物行動の数理的研究の方針のひと
つとして疑うべくもなく有用な数理モデリン
グである.その数理モデルの解析によって導
かれる最適行動選択の連鎖はあまりにも理想
的すぎて現実を「説明できる」ものではない,
と考える向きは,ちょっと浅薄な数理的研究に
–7–
8
瀬野:動的計画法を用いた動物行動の最適理論
対する考え方である.数理モデル解析は必ず
しも現実を「説明できるか」ということで評
価されるべきではなく,得られた結果を現実
と対比させることによって生物学的な議論を
より深めるための材料を提供できるところに
10) 瀬野: 子育てにおける闘争 —親子対立と托卵;シリーズ・
ニューバイオフィジックス 10 数理生態学(日本生物物理学
会シリーズ・ニューバイオフィジックス刊行委員会編),共立
出版 (1997)
11) H. Tokuda and H. Seno: Some mathematical considerations on the parent-offspring conflict phenomenon,
J. theor. Biol., Vol. 170, pp. 145–157 (1994)
大きな意義や面白さがある.
Mangel と Clark の本
8)
付
録
では,体力と相談し
ながらの餌場選択行動(‘patch selection’),ラ
イオンによる狩り行動,昆虫の繁殖行動,プ
数理モデリングの変数とパラメータ一覧:
(1) 主に親に関わるもの
a: 親の齢(単位:繁殖期)
ランクトンの垂直分布の季節変動,鳥類にお
af : 初めて繁殖可能になる齢
ける親の世話と仔数,クモや猛禽類における
al : 繁殖可能である最終齢
移動行動などの具体的な例が取り上げられて
いる.また,Kelly & Kennedy の論文 7) では,
T : 繁殖期の長さ(単位:日)
t: 繁殖期が始まってからの日数(=子の齢)
ts : 親による世話が終了する時の子の齢(単位:日)
動的計画法によるタカにおける子育て放棄行
σf : 子の世話をする親の繁殖期1日あたりの生存確率
動についての考察がなされ,Houston らの論
σp : 子の世話を終了した親の繁殖期1日あたりの生存確率
文
4)
では,小鳥によるさえずり行動について
の考察が動的計画法を用いた数理モデル解析
によって展開されている.本稿の著者も,鳥
類における種内托卵行動に関する動的計画法
を応用した数理モデリングを考察した 10) .
σw : 繁殖可能個体(親)の繁殖期後,次回繁殖期までの生存確率
R(a): a 歳の親の繁殖期の終わりにおける将来の期待繁殖価
Fp (ts ): 繁殖期 ts 日目で子の世話をやめる親の繁殖期間中の
生存確率
J(ts ;R(a)): 繁殖期 ts 日目で子の世話をやめる a 歳の親の適
応度
(2) 主に子に関わるもの
このように,動的計画法を応用した数理モデ
リング,数理モデル解析は,さらに多様な生物
Y (t): 産まれおちてから t 日目の初めにおける子の体重
Y (T ;ts ): 繁殖期 ts 日目で独立した子の独立直前の体重
φ(Y ): 独立時に体重 Y の子が繁殖可能個体まで成長する確率
の動態に関して有効に使えると期待できる.
(1999 年 12 月**日受付)
yc : 子が繁殖可能まで成長するのに最低限必要な繁殖期終了時
の体重
Y1 : 産まれおちた時点での子の体重
参 考 文 献
k1 : 親の世話の下にある子の体重の1日あたりの増分
1) C. W. Clark and R. C. Ydenberg: The risks of parenthood. I. General theory and applications, Evol. Ecol.,
Vol. 4, pp. 21–34 (1990)
2) C. W. Clark and R. C. Ydenberg: The risks of parenthood. II. Parent-offspring conflict, Evol. Ecol., Vol. 4,
pp. 312–325 (1990)
3) M. Higashi and N. Yamamura: What determines animal group size: Insider-outsider conflict and its resolution, Am. Nat., Vol. 142, pp. 553–563 (1993)
4) A. Houston, C. Clark, J. McNamara and M. Mangel:
Dynamic models in beharioural and evolutionary ecology, Nature, Vol. 332, pp. 29–34 (1988)
5) A. I. Houston and J. M. McNamara: Models of Adaptive Behaviour: An Approach Based on State, Cambridge, Cambridge University Press (1999)
6) 巌佐: 数理生物学入門 —生物社会のダイナミックスを探る,
共立出版 (1998)[初版は,1990 年,HBJ 出版局より]
7) E. J. Kelly and P. L. Kennedy: A dynamic state variable model of mate desertion in Cooper’s Hawks, Ecology, Vol. 74, pp. 351–366 (1993)
8) M. Mangel and C. W. Clark: Dynamic Modeling in
Behavioural Ecology, Princeton, NJ, Princeton University Press (1988)
9) 酒井,高田,近: 進化生態学最前線:生物の不思議を解く 生
き物の進化ゲーム,共立出版 (1999)
–8–
k2 : 独立後の子の繁殖期における体重の1日あたりの増分
σn : 親の世話の下にある子の1日あたりの生存確率
σo : 独立後の子の繁殖期における1日あたりの生存確率
Fo (ts ): 繁殖期 ts 日目で独立した子の誕生後繁殖可能までの
生存確率
著 者 略 歴
せ
の
瀬 野
ひろ
み
裕 美
1960 年 7 月 18 日生.1989 年 9 月京
都大学大学院理学研究科博士後期課程研
究指導認定同日退学.1987–1989 年イタ
リアナポリ大学留学後,1989 年日本医科
大学基礎医学情報処理室助手,1992 年広
島大学理学部(数学科)講師,1994 年奈
良女子大学理学部(情報科学科)助教授
を経て,1998 年奈良女子大学大学院(人
間文化研究科)助教授に配置換,現在に至
る.生物数理,数理生物学における生命現象の数理モデリング,
数理モデル解析の研究に従事.理学博士(京都大学).SIAM,
SMB, ESMTB などの会員.
© Copyright 2026 Paperzz






![P1-2 表紙 [PDFファイル/3.13MB]](http://s3.paperzz.com/store/data/005439999_1-955846c23d58ee5b48e3d526f7b3df30-250x500.png)