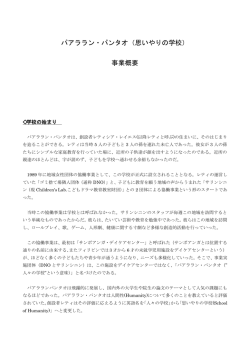
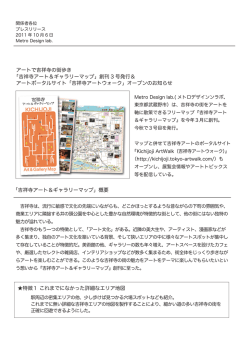
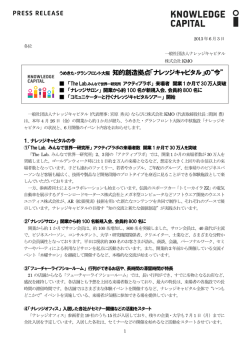
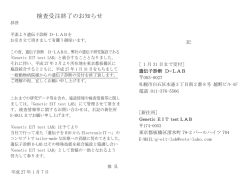
人の生活の場で活躍する ロボットに関する研究 水内郁夫(東京農工大学) http://mizuuchi.lab.tuat.ac.jp/ 2014年6月17日 1 Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ 大きな課題:「人間・生物とロボット」 ⼈間や動物の⾝体構造や運動制御 我々の⽇常における⾼度な知能 Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ 東京農工大学水内研究室の研究 ロボット技術 産業⽤ロボットで成功(定型作業・⾼速・⾼精度) 家庭⽤ロボットはこれから(判断能⼒・複雑操作) 我々のねらい:判断能力・複雑操作能力 人間に学ぶ (身体構造・情報処理・制御) 主な研究 ⾝体構造:筋⾻格、柔軟性、多⾃由度協調、… 情報処理:実世界認識、⽚付け作業、果実収穫、… 制御:動的運動、操縦学習、⾃律⾏動、… Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ (1)柔軟性を持つロボット • 物理的柔軟性 • ⾮線形ばね組み込み筋⾁ユニット 超⼩型コンプレッサ • 空気圧アクチュエータ、柔軟な外装 • 弾性を仮定する構造材によるロボット構成 McKibben型⼈⼯筋 • ⼈や環境との安全な接触 • なじむ。衝撃吸収。 • 外⼒の急変を伴うタスク(クギ打ち、引き出し等) • 構成法・制御法 • 家庭内活動可能な⾃⽴性(紐無し・⾃⼰充電) • 柔軟性の調節法 • 弾性エネルギの蓄積・解放による瞬発⼒ • 構造が弾性を持つヒューマノイドの制御法 筋⾻格型ヒューマノイド Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ コンプレッサ搭載型空気圧駆動筋骨格ヒューマノイドbuEnwa 広範囲,かつ長時間活動可能 後転跳びの実現に向けた後方跳 躍に適した筋配置 *筋肉 (赤, 緑, 紫, 橙) 脊椎の柔軟性によるブリッジ 骨格内がタンクに なっている 空気 大腿,下腿,前腕 上腕の4ヶ所 前腕の断面図 Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ 高圧(低流量)小型コンプレッサ開発 Output pressure [kPa] 1000 The prototype compressor SQUSE MP-2-C 800 600 400 最⼤圧縮圧:958[kPa] 縮 200 0 0 200 400 600 800 Compression time [s] 1000 1200 コンプレッサ搭載型 跳躍ロボット試作 質量:約4[kg] 全⾼:52[cm] タンク容量:約2.8[L] Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ (2) ロボット知能化ソフトウェア ※RT=Robot Technology RTコンポーネント 「RTミドルウェア」に基づくソフトウェア部品 企業単位・研究室単位だったロボットのソフトウェ アを共有可能にする試み NEDO次世代ロボット知能化プロジェクト 2007〜2011年度(5年間) プラットフォーム検証グループとして参画 「⽣活環境情報収集知能モジュール」の開発 研究室ロボットのシステム基盤として利⽤を推進 OpenRTM-aist (産総研) ROS (⽶Willow Garage社) 知能化PJリファレンス OpenCV (Intel ⇒ Willow Garage) ハードウェア(ロボット) Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ (3) 家庭内実証的タスク実現 実証的タスク実現 実際の家庭内のような環境を研究室に⽤意 タスクを試⾏錯誤する過程で実現法を抽出 ロボット知能化PJのプラットフォームを基盤 システムとしてゆく。 タスク例 物品⽚付け⾏動 家庭内物品認識 家庭内⾃律移動ソフトウェア ⽬指す形態 アームとカメラを持つRoomba ⾃由に動き回る柔軟⼦供型ロボット キッチンロボットとの連携 Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ ベルト潜り込み式玄関整理ロボット 平ベルト⽤プーリ モーター タイミング ベルト 1 2 バッテリー 3 平ベルト • ボール ローラー 平ベルト軸 ⼨法[mm]…180W×275D×50H • ⾞輪 タイミング ベルト⽤プーリ つま先から潜り込み,ベルトを逆回転 させることで可能 外部カメラから得られる情報を利⽤ すれば靴の向きも判断可能 試作機外観 Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ (4) キッチン作業支援 画像などで概況を把握した後に、詳細情報をハンド埋め込み型センサによ り得ながら、⾷器を取り扱う。 テーマは「⼿探りアルゴリズム」 壊れやすい⾷器の取り扱いが可能な、敏感なMEMS触覚センサ、⾮接触近 接覚センサ、⼒覚センサ等を複数埋め込み。 ⾷後の⾷器が運ばれてくると、⼀つずつ濯いで⾷洗機に⼊れ、最後に⾷洗 機のふたを閉めてスイッチを⼊れる。 システムの発展:滑り覚・接触⼒の⽅向(摩擦⼒の操作) せん断力計測が可能な MEMS触覚センサ(米粒大) 3軸⼒センサ×2 圧⼒センサ×8 6軸⼒センサ×1 近接覚センサ×5 キッチン据え付け7⾃由度アーム(スライダ含) MEMS触覚センサ×4 多種センサ埋め込み型少⾃由度ハンド Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ 接触力の大きさと「方向」の制御 接触⼒の⼤きさだけでなく、⽅向も制御する必要。 初期滑りを検出して最少⼒把持を実現したい。 うまくつかむためには・・・? 接触力 摩擦円錐 重力 力の大きさ・方向 が重要 Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ 触覚・滑り覚に基づく接触力制御 サーボモータ 滑りセンサ基板 6軸力センサ 光学マウスセンサ 光学マウスセンサを⽤いた 滑り覚センサ基板(新規開発) 接触面 6軸⼒覚・滑り覚 を埋め込んだ指先 接触面(ゴムシート) 24mm 6軸センサ取り付け穴 光学マウスセンサ センサと接触平面 レンズ(裏面) 50mm fx:押し付け力 fz:摩擦力 fx fz 8.0m m アクリル板(1~2mm位) Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ (6) 植物ロボット化、農業ロボット 動物 特徴: ⾃ら⾷料を得るために、移動 能⼒と操作能⼒を有する。そ のための感覚系と情報処理系 も発達している(脳)。 アクチュエーション: 移動、操作、⽣殖 センシング:多様なセンサ、神経細胞、脳の情報処理 植物 特徴: 種⼦や根を介して、世代を超える ことでしか、移動できない。⾷糧 アクチュエーション:世代をまたいだ移動、 に相当するのは、CO2と⽔と光。 わずかな操作、⾃⼒ではない⽣殖 感覚系・情報処理系は、ハードワ イヤードな形のメカニズム。 センシング: 限定的なセンサと固定的な反応系 Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ 植物ロボット化(自律移動植物ポット) ロボット導⼊による⽣産の効率化 農⼯⼤キャンパスファクトリー概略図 春 早春 夏 冬 ⾃律移動植物ポットの開発 秋 晩秋 ・早春 春 夏 晩秋 秋 冬を再現した環境制御室 ・個々のポットを移動させることにより栽培 Sensor 温度 重量 輝度 CO2 カメラ ⽔分計 e.t.c. Pot ・植物や環境情報をセンシング ・状況に応じて自律移動 ・生産の効率化・省力化を実現 Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ 太陽光の時間的空間的有効活用 1.日向への高密度化 2.日向日陰間の入れ替わり So good!! 光合成能力 太陽光を有効活用(光合成能力を高く維持)するには? 温度 Too cold. Sunlight Sunlight Too hot !! ・光合成の温度依存性を考慮 ・光合成に最適な温度となるように自律移動 Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ 植木鉢型ロボット制作・実験環境構築 制御検証⽤植⽊鉢型ロボット 果樹栽培⽤植⽊鉢型ロボット 仕様 幅:120[mm] ⾼さ:80[mm] 仕様 直径:600[mm] ⾼さ:480[mm] ・卓上サイズ ・差動駆動輪型 ・制御アルゴリズム 検証⽤ ・無線通信 ・耐荷重:30kg ・果樹栽培⽤ ・全⽅位移動台⾞ ・ソーラーパネル ⾃⼰発電 ・植物⼯場での実験 ・無線通信 Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ 熟度判定に基づくブルーベリー収穫 RGB値から ⻘⾊抽出 1 蛍光灯 DepthSense311 (RGB & 3D距離カメ ラ) 2 柔かさ測 定 3 ハフ変換 による円検出 距離画像 RGB画像 もぎ取り易さ に基づく収穫 空気圧制御 もぎ取り易い実 もぎ取りにくい実 Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ 果樹の3次元枝構造認識 • 果⽪に特徴がなくても枝には 特徴がある • ⻑さ、⽅向、つながり情報 • 枝構造に基づく個体識別 • 枝の繋がり情報の利⽤ 実A 枝a ・3次元情報 ・画像情報 ・⽅⾓情報 枝b 枝c 枝d 枝e 実B 実A:枝a,枝b,枝d,枝e 実B:枝c,枝d,枝e ・・・ ICタグ付や印字を行わず、果皮に特徴のない実への適用を目指す Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ (7)身体の柔軟性(安全性と瞬発力) 弾性( F kx )、粘性( F cv) 瞬発力利用動作 ゴムやバネ ⼒の急変に対応 衝突時⇒安全性(従来から想定されてきた) 静⽌摩擦から動摩擦に切り替わる瞬間 ⾛る 「しなり」を利⽤した動作(本研究のねらい) 投球,テニスのサーブ,サッカーのキック,… 瞬間的な、⼤きな速さや、⼤きな⼒ 低性能のアクチュエータで瞬間的⾼性能 難しさ 投げる 跳ぶ 適切な弾性(k)は? 適切な⼒の⼊れ⽅は?(テイクバック,投球モーション) 何に依存するか? ⇒ 慣性,弾性,粘性,⼒,… Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ モータ+直列弾性要素⇒瞬間的高速 SMCS: Spring-Motor Coupling System Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ 20 弾性を有する跳躍用装具装着による ヒューマノイドの跳躍運動 ⼈間⽤跳躍⽤装具 Jumping Stilts 研究概要 ヒューマノイドが⾛⾏や跳躍など、⾼速・⾼出⼒な運動を⾏ うためには、⾼出⼒なアクチュエータや頑丈な機構が要求さ れます。これに対し本研究ではヒューマノイドの装具装着に よる⾼い運動能⼒の発揮を⽬指して研究しています。 ヒューマノイド⽤装具の製作 計算モデルによる運動解析 実機による実験 ヒューマノイド k=1304[N/m] 装具 実機での跳躍に成功 Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ (8) 人間の上達に学ぶロボット上達・発達 双⽅向型のロボット操縦環境 ロボットのセンサ・モータ情報の詳細ログが残る。 操縦者がしだいに上達する。 上達過程のデータ センサベーストな動作の発達過程 「上達後の成果をロボットに移植」のみならず、 「ロボットが⾃動的に上達する仕組み」へ タスク例:物体操作、動的動作 Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ ウェアラブルロボット操縦デバイス「腱人」 ⼒覚の提⽰:各種センサ統合⾮線形ばね特性筋型ユニット 姿勢の計測:各部の筋⻑の関係 ヒューマノイド 操縦実験 センサ統合 筋型ユニット 腱人 素体:柔軟なプロテクタ・⼿袋・ベルト 17⾃由度:⽚⼿7(肩3・肘1・⼿⾸3)・背⾻3 28本の筋:⽚⼿12(肩6・肘2・⼿⾸4)・背⾻4 重量:5.5kg (制御⽤PCと電源を除く) Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ まとめ ロボットの⾝体構造の研究 コンプレッサ搭載型空気圧⼈⼯筋駆動ロボット 多関節筋を含む筋配置の最適化 複雑操作能⼒の研究 弾性を活⽤するロボットの⾝体構成法と制御法 弾性・慣性・重⼒エネルギの分配法 ヒトの感覚運動系・上達過程に学ぶ 実⽤的タスク実現 家庭内家事⽀援(⽚付け・物品記憶・物体操作) 農業⽀援(植⽊鉢ロボット、収穫ロボット、⽣育管理) Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ 本技術に関する知的財産権 発明の名称:植物栽培⽅法と植物栽培システム 出願番号:特願2012-116626(特開2013-242777) 出願⼈:国⽴⼤学法⼈東京農⼯⼤学 発明者:⽔内 郁夫、湯浅 雅⼈ 発明の名称:収穫装置と収穫⽅法 出願番号:特願2012-115862(特開2013-240299) 出願⼈:国⽴⼤学法⼈東京農⼯⼤学 発明者:⽔内 郁夫、國芳 隼平 Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/ お問合せ先 東京農工大学 先端産学連携研究推進センター TEL 042-388-7550 FAX 042-388-7553 e-mail [email protected] Mizuuchi Lab. http://mizuuchi.lab.tuat.ac.jp/
© Copyright 2026 Paperzz