Title
Author(s)
大規模電力システムの安定化制御に関する研究
世古口, 雅宏
Citation
Issue Date
URL
2004
http://repo.lib.nitech.ac.jp/handle/123456789/438
Rights
Type
Textversion
Thesis or Dissertation
author
・名古屋工業大学学術機関リポジトリは、名古屋工業大学内で生産された学術情報を
電子的に収集・保存・発信するシステムです。
・論文の著作権は、著者または出版社が保持しています。著作権法で定める権利制限
規定を超える利用については、著作権者に許諾を得てください。
・Textversion に「Author」と記載された論文は、著者原稿となります。
実際の出版社版とは、レイアウト、字句校正レベルの異同がある場合もあります。
・Nagoya Institute of Technology Repository Sytem is built to collect, archive and
offer electronically the academic information produced by Nagoya Institute of
Technology.
・The copyright and related rights of the article are held by authors or publishers.
The copyright owners' consents must be required to use it over the curtailment of
copyrights.
・Textversion "Author " means the article is author's version.
Author version may have some difference in layouts and wordings form publisher
version.
大規模電力システムの安定化制御に関する研究
2004年
世古口
雅宏
大規模電力システムの安定化制御に関する研究
次
目
第1章
緒論
1
1.1
はじめに
1.2
大規模電力系統の現状と問題点
1.3
電力系統の運用状態と安定化対策
1.4
シミュレータ試験装置
10
1.5
本研究の目的
11
1.6
本研究の内容
1 1-
1
●
●
●
●
=
=
…
…
…
‥
●
●
■
●
●
●
■
■
…
…
…
はじめに
2.2
直流送電設備に伴う軸ねじれ振動現象とその発生メカニズム
2.2.1
軸ねじれ振動現象
2.2.2
軸ねじれ振動現象発生メカニズム
2.2.3
発生の主要因
解析手法
ユニット相互作用係数(UIF)
2.3.2
周波数応答法
2.3.3
固有値法
2.3.4
時間額域シミュレーション法
2.3.5
リアルタイムシミュレータ
2.4
抑制対策
2.4.1
軸ねじれ振動検出信号の選定
2.4.2
抑制制御ブロック設計の考え方
2.4.3
軸ねじれ振動抑制制御装置の構成
2.5
2.5.1
…
…
軸ねじれ振動検出器の開発
目標性能
t(1)-
-
●
●
-
●
■
-
●
-
=
●
●
●
●
●
■
■
●
■
●
■
■
●
■
…
2.1
2.3.1
…
‥
第2章発電機の軸ねじれ振動抑制制御
2.3
-
…
…
●
-
●
-
…
…
=
■
2
5
振動検出方法の検討
2.5.2
2.5.3
振動検出遅れ時間の検討
2.5.4
振動検出点の検討
2.5.5
振動検出方式の検証
2.5.6
周波数検出遅れを考慮した制御系の設計
実系統モデルに対する軸ねじれ振動解析結果
2.6
2.6.1
ユニット相互作用係数による評価
(1)解析条件
(2)解析結果
周波数応答法による検討
2.6.2
(1)解析条件
(2)解析結果
時間額域数値シミュレーション、シミュレータ試験による検証
2.6.3
(1)解析条件
(2)解析結果
(3)解析波形例
2.7
実プラントにおける試験
2.8
結言
・2.9
参考文献
第3章
非線形状態方程式の厳密線形化手法による発電機制御
3.1
はじめに
3.2
非線形システム論
仁U
5
ハhU
7
3.2.1
従来の線形化手法
亡じ
3.2.2
厳密線形化手法
仁U00
3.3
7
厳密線形化手法の発電機制御への適用
仁じ
9
3.3.1
電力システムの状態方程式
仁U
3.3.2
厳密線形化によるコントローラの設計
71
3.3.3
電力系統の状態推定
74
9
(1)多機系統のモデリング
系統情報推定による厳密線形化
3.3.4
3.4
74
7 90
モデル系統による検討
3.4.1
77
検討条件
7 00
ー(2)-
検討結果と考察
3.4.2
従来型発電機PSS定数の最適化
3.4.3
シミュレータ試験による検証
3.5
3.5.1
シミュレータ試験の概要
3.5.2
シミュレータ試験条件
3.5.3
シミュレータ試験結果
3
6
結言
3
7
参考文献
3
8
付録
第4章非線形最適制御STATCOMによる系統安定化
4.1
はじめに
4.2
厳密線形化手法のSTATCOM制御への適用
4.2.1
STATCOMを含む電力システムの状態方程式
93
4.2.2
厳密線形化によるコントローラの設計
94
4.2.3
STATCOM制御装置の全体構成
9 仁U
4.3
モデル系統による検討
4.3.1
数値シミュレーション条件
4.3.2
数値シミュレーション結果
4.4
q)OO
q)OO
10O
シミュレータ試験による検証
102
4.4.1
シミュレータ試験装置
10 2
4.4.2
シミュレータ試験の条件
10 3
4.4.3
シミュレータ試験結果と考察
10 3
4.5
結言
1 0 「D
4.6
参考文献
1 0 仁U
4.7
付録
10 7
第5章
系統解析用コンバインドサイクルモデルの開発
5.1
はじめに
5.2
背景
5.3
コンバインドサイクルプラントの概要
5.3.1
多軸型コンバインドプラント
ー(3)-
5.3.2
5.4
1 14
一軸型コンバインドプラント
コンバインドサイクルプラントのモデル化
1 16
5.4.1
モデル化の範囲と特長
1 1仁U
5.4.2
モデル化の考え方
11
5.5
OO
(1)ガスタービン本体
1 1 OO
(2)制御系
124
数値シミュレーションによるモデルの検討
125
5.5.1
プラントモデル静特性
125
5.5.2
プラントモデル動特性
1 2 qU
(1)周波数変動時の応動
12 9
(2)負荷遮断試験
13 0
5.6
ハイブリッド系統シミュレータによる動特性試験
132
5.6.1ハイブリッドシミュレータ発電機モデルの構成
132
5.6.2
プラント演算装置による模擬
132
5.6.3
多軸型コンハ○インドサイクルの模擬方法
13 3
5.7
結言
13 5
5.8
参考文献
13 仁U
5.9
付録
13 7
第6章
結論
6.1
本研究の結論、工学的意義
6.2
残された課題、将来展望
謝辞
14
研究業績
14 5
-(4)-
』1
第1章
1.1
緒論
はじめに
わが国の電力システムは500kVの基幹系統増強整備がはぼ整い、系統間の連系が強
化され電気事業の広域運営体制が完成している。この全国的なネットワークのもとで、電
力設備の効率的な運用が計られ、電力融通が適宜行われている。さらに近年、電力システ
ムには地球環境負荷の低減、コスト低減や電力供給の信頼性確保など社会的な要求が高ま
っている。
地球温暖化の主な原因とされている二酸化炭素(CO2)の削減に向け、発電する時にC
O2を排出しない原子力発電の推進や、化石燃料の中でも比較的CO2排出量の少ないLN
G(液化天然ガス)火力の導入が進められている。このため原子九大容量LNG火力等
の電源の比率が高まり、大容量電力を長距離送電する傾向が高まっている。
一方、電力の自由化による独立発電業者(IPP:Independent
Power
Producer)の参入や
分散型電源に対抗するため、電力業界はコスト低減を求められる状況にある。電力各社は
設備の有効利用、運用の効率化や設備投資の抑制を計っている。また新規事業者の参入や
分散電源の系統への並入は、電力系統の運用に不確定な要素を加えることになる。
このような状況下で電力の供給信頼性を確保しつつ、コスト低減を実現するには、発電
機や系統の電力制御能力を高めて、既存の送電線の送電能力を極限まで活用することが重
要である。送電線の送電容量を熱容量の限界まで増大させるには、パワーエレクトロニク
ス技術を応用した静止型無効電力補償装置や直流送電システムなどいわゆるFACTS機
器(FACTS:Flexible
AC
Transmission
System)の導入が有効である。また発電機の電力制
御能力を高めるには、発電機励磁系やガバナ系を高速に制御することが有効である。
しかしFACTS機器は瞬時な応答特性を持つのに対し、発電プラントにはタービン発
電機系に含まれる機械系や燃焼系のような相対的に遅い応答特性が存在する。このため系
統条件によっては、FACTS機器を含む電力系統と発電プラントが相互に影響し合い、
制御の協調が取れず安定運転に支障をきたす事態も想定される。さらに発電機を限度ぎり
ぎりまで運用すると系統の非線形性が強く現れ、予想しえない現象の発生も懸念される。
従って発電プラントと複雑な非線形システムである電力系統との協調は、今後の電力供給
の安定運用および高信頼化において重要な課題と言える。
電力系統において送電線事故等重大故障が発生すると事故直後は緊急状態となる。この
場合事故部分を速やかに遮断して、ほかへ波及させないような緊急制御が行われる。この
緊急制御では保護システムによる事故除去に引き続き事故波及防止制御が高速に実施され
る。また人間系による緊急操作も実施される。
自由化後の電力系統においては運用の不確実性が大きくなる一方、事故波及範囲の極小
化が要求される。従って不確実性を含む運用の中で、緊急状態に対応するには、これまで
のような事前設定型事故波及防止システムでは対処しきれなく、オンライン演算型や事後
演算型システムなど新しい制御システムの導入の要求が強まっている。しかし事後演算型
システムは故障直後、制御量演算から対応する機器の制御操作までの全所要時間が間に合
うという保証はなく、複雑化した系統での想定外の故障への対応も困難なことなどが問題
点として挙げられる。また電源や負荷遮断のみでは以降継続する過渡的な電力動揺、電圧
動揺や周波数動揺問題の全てを解決できない。そのため発電機やFACTS機器による高
速な系統制御によるそれらの動揺の安定化が求められる。
この巨大な電力システムにおいて発生する緊急状態は一様ではなく、ネットワーク構
成や種類、接続されている各種機器構成によって異なる。また緊急状態の波及範囲も広域
的な場合もあれば、局所的な場合もある。本研究では筆者が長年担当したいくつかの業務
の内、①発電機と直流送電設備の相互作用問題による軸ねじれ振動抑制制御
②潮流限界
まで運用しても安定化効果を期待できる発電機励磁制御系や無効電力補償装置制御系
③コンバインドサイクルプラントによる周波数制御、を緊急状態における動揺安定化制御
方策という観点から論をまとめるものである。
1.2
大規模電力系統の現状と問題点[111川■2J
電力系統は水力、火力および原子力などの発電設備、変電設備、送配電線路、そして一
般の家庭および工場で使う負荷に至るまでの各設備が有機的に組み合わさった巨大なシス
テムである。電力系統の諸設備は広大な地域に広がっている他、雷などに代表される自然
故障に遭遇する可能性も高く、電気エネルギーは生産と消費とが同時であるなどのため従
来から系統運用には高度な技術が採用されてきた。
わが国の電力系統は、図1.1に示すように、主として全国の電力供給を地域的に分割担
当している9電力+沖縄電力によって構築・維持されている。各社電力網はそれぞれ独立
した系統を構成しているが、沖縄電力を除いて各社間は連系しており、供給信頼度向上お
よび電力融通を行っている。500kVまたは275kV系統の交流同期連系が主である
が、北海道一束北電力間では非同期直流連系が、東京一中部電力間では、長野県新信濃お
よび静岡県佐久間にある
2カ所の周波数変換装置(50/60Hz)による東西地域の異
周波直流連系がなされている。また中部一北陸電力間のBTB連系設備(60Hz系統間を
直流に一旦変換してから連系する方式)や関西一四国電力間の大容量直流連系も完成した。
国内全体としては電気的に一つの系統となっている。東京一東北連系系統はループの多い
構成、それ以外の西側連系系統は東西に広がる串型構成となっている。両連系系統とも地
域的な需要密度の違いや土地の利用形態の違いはあるが、電源側系統、負荷側系統とも幹
線の節となる変電所から放射状に枝別れしているのは同じである。
現在、発電設備の増強と送変電設備の拡充強化はほぼ整い、電源の大容量化・遠隔化、
送電線路の大容量化・長距離化した系統構成になっている。これによって、電力供給は充
足し、系統の円滑な運用が確保され、定常的には何ら問題はない。しかし負荷変動や系統
2
故障など系統擾乱に伴なう電力動揺が生じている過渡状態においては、例えば以下のよう
な問題が生ずる恐れがある。
(1)発電機と直流送電設備の相互作用問題【卜3川▼10]
交直連系には接続点の電圧、電流を介しお互いに影響を及ぼし合う相互作用の存在が
知られている。この現象は交流系で発生した原因が直流系に影響を及ぼし、この結果が
交流系にはね返って相互に影響を及ぼし合う現象である。直流系で発生した原因につい
ても同様である。相互作用の過程で生ずる現象として交流系では過渡過電圧、高調波不
安定現象、直流系では電力脈動現象、発電機の軸ねじれ現象などが知られている。
(2)系統の位相角安定度悪化問題【1
4】
送電線の長距離化と大電力輸送は系統の安定度低下をもたらす。電流容量が大きく、
インダクタンスの低い多導体送電方式を用いても、同期機の安定度で左右される運用限
界以上に送電電力を上げることができない。送電限界電力を上げるためには何らかの安
定度確保対策が必要である。特にわが国では位相角安定度が送電可能量の制約となるケ
ースが多い。
(3)系統の電圧安定度悪化問題[1
21】
需要規模の拡大、電源の遠隔・偏在化および広域運営の拡大などに伴って、大電力を
都市部の需要地へ比較的長距離にわたって送電することが一般的となってきている。一
方、負荷側においてもインバータ、誘導電動機などの定電力負荷の増加により、その特
性が変化してきている。
また規制緩和に伴い、今後、独立系発電事業者(IPP)が電力系統に連系され
託送が広く実施されるようになると、これらの発電機が系統に並列してくることによる
電圧変動や電圧安定性に対する影響について十分配慮する必要がある。
(4)系統の周波数安定度の悪化問題【1-5】
原子力、大容量LNG火力等の周波数応動特性の低い電源の比率が高まり、緊急時
の周波数制御能力の低下が懸念されている。このため、電力融通制御能力の高い直流
連系設備を緊急時の電力融通に積極的に活用することで系統周波数動揺の安定化を図
る考えがある。また周波数応動特性の低いLNG火力発電に対しても周波数応動性能
を高める系統周波数制御を実施するニーズがあり、これを実現するためには系統周波
数変動時にプラントがどのように応動するかについて事前に評価しておく必要がある。
3
卸
図1.1わが国の基幹電力系統と連系の状況【1
1】【1
2】
13
電力系統の運用状態と安定化対策
電力系統運用の状態と信頼度制御の定義を表1・1に示す。電力系統運用の状態は平常状
態(NormalState)、緊急状態(Emergency
戒状態(Alert
State)、復旧状態(Restorative
State)、要警
State)に分けて考えることができる【1-6][l・19Hl・20]。電力系統の状態に対
応した信頼度制御として、予防制御、緊急制御と復旧制御が挙げられる。図1.2に電力系
統運用の状態と信頼度制御の関連を示す。
平常状態とは、中央給電指令所のコンピュータの自動調整システムあるいは人間系の補
完操作により、電力供給、周波数、電圧、潮流などが適正に維持されている状態で、系統
に多少の擾乱があっても電力の安定供給に支障のない範囲で運用されている状態をいう。
また、要警戒状態とは現時点では一応安全であるが、電力系統内のある箇所で故障が起
きたときを想定すると、不安全となる故障ケースが少なくとも一つは存在する状態をいう。
予防制御とは、予測されるケースに対して、故障後の波及を最小限度に止めるように、あ
らかじめ発電機出力の配分や系統構成を変更して潮流調整を行い、故障があっても安全な
状態に引き戻せ得る事前措置を施す方法である。
これに対して、緊急状態とは、何らかの原因で発生した故障または異常状態により系統
が不安定になり、そのまま放置しておくと故障が拡大波及し、送電線トリップ、電源や負
荷の脱落など大規模停電に至る系統崩壊に進展する恐れのある非常事態をいう。この状態
においては故障または異常事態を素早く検知し、拡大波及を抑制し、可能な限り供給支障
を少なくする必要がある。この場合は応急処置となるが、少なくとも系統状態を平常状態
あるいは要警戒状態、最悪でも復旧状態に直ちに移行させる操作が必要となる。この操作
を緊急制御と呼ぶ。
復旧状態とは、この緊急制御の結果などにより、系統が一応安定化しているものの、系
統の一部に供給支障、送電線停止などを残している状態である。このとき、供給支障、機
器停止を速やかに解消するための操作が必要となるが、これを復旧制御と呼ぶ。復旧制御
は運用指針に基づき運用者(人間系)により速やかかつ着実に行われるべきものであるが、
緊急度の高いものについては機器保護・系統保護、発電機の励磁系制御などの機械的な自
動制御に委ねられる。
信頼度制御における保護・制御技術の具体的内容を表1.2に示す。緊急制御における保
護技術として保護システムによる事故除去(主保護、後備保護リレー)や保護システムに
よる事故波及防止(SOR,UFR,TSC,SSC)が挙げられる。従来制御技術につ
いては人間系による緊急操作が主体であった。今後、系統が大規模、複雑化し重潮流化す
ると事故除去後に、事故波及防止のために電源制限、負荷遮断や調相制御を事前設定に従
って行うだけでは、位相角、電圧および周波数安定度が維持できない事態も想定される。
この対策としてFACTS機器や発電機による高速な系統制御が有効であると考えられる。
5
表1.1
電力系統運用の状態と信頼度制御の定義【1・20】
信頼度制御
電力系統の状態
平常状態
予防制御
周波数、電圧に異常がなく、停
し、潮流調整、系統構成変更
電も発生していない状態。
要警戒
状態
電力系統の信頼度を評価
を行う制御。
不安全となる故障ケースが少な
くとも一つは存在する状態。
緊急制御
事故発生により、そのまま放置
緊急状態
事故発生後の事故区間の選
すると拡大波及する恐れのある状
択遮断など事故除去、波及防
態。
止までの制御。
復旧状態
復旧制御
緊急制御により系統は一応安定
緊急制御後、停電を解消し早
化したが、一部に停電や発電停止
期に平常時系統に復帰させる
が残っている状態。
ための制御。
(広域停電の恐れあり)
図1.2
電力系統運用の状態と信頼度制御の関連【1・6肛19川・20】
本研究においては、三つの状態のうち主として系統崩壊に進展する恐れのある緊急状態
を扱うものとする。表1.3に電力系統の安定運用を図る手段である緊急制御として直流送
電設備、発電機励磁系、自励式SVC及び発電機ガバナによる系統制御の意義・必要性と
検討課題を示す。
直流送電設備による緊急電力融通制御を有効に活用するためには、発電機と直流送電設
備の相互作用を事前に検討しておくことが重要である。この相互作用の対策としての発電
機軸ねじれ振動抑制対策について詳細に検討した。
6
表1.2
信頼度制御における保護・制御技術【1-20】
保護技術
信頼度制御
制御技術
予防制御
言頼
・供給制御システムによる系統のイ
度監視、評価、表示
系
・主として人間系による潮流調整、
統変更操作
緊急制御
・保護システムによる事故除去
(主保護、後備保護リレー)
・人間系による緊急操作
(負荷 遮断)
・保護システムによる事故波及防.
止(SOR,UFR,
四
ノ
TSC,SSC)
準
復旧制御
・保護システムによる自動復旧
(送電線自動再閉路
・給電制御システムによる復旧支
議
・主として人間系による復旧操作
配変受電回線自動切替)
表1.3
内容
NO.
1
2
緊急時系統制御の意義・必要性と検討課題
意義・必要性
検討課題
直流送電設備による
・系統の位相角安定度向上
系統制御
・系統の周波数安定度向上
・発電機と直流送電設備の相
互作用検討
・系統事故後の電圧、周波数変
動抑制
・直流送電設備による軸ねじ
れ振動抑制制御
発電機励磁制御に
・系統の位相角安定度向上
よる系統安定化
・系統の電圧安定度向上
・重潮流状態における制御性
能向上
・系統事故後の電圧変動抑制
3
4
静止型無効電力補償
・系統の位相角安定度向上
装置による系統安定
・系統の電圧安定度向上
化
・系続事故後の電圧変動抑制
LNG(コンバインド
・系統の周波数安定度向上
サイクル)火力発電
・系統事故後の周波数変動抑制
・重潮流状態における制御性
能向上
・系統周波数変動時のプラン
ト燃焼系安定性評価
機による周波数制御
電力系統におけるFACTS機器や発電機による系統制御により期待される効果を表1.4
に示す。直流送電設備による系統制御の例を図1.3に示す。緊急に電力を融通することによ
り、発電機の停止を避けることができる。電力系統における系統制御の概要を図1.4に示す。
直流送電設備は過渡嶺域位相角安定度向上効果のほかに、電力融通制御によりLFC容量増
大の効果が期待できる。発電機励磁制御による系続安定化では中間領域での位相角安定度向上
効果が期待できる。静止型無効電力補償装置による系統安定化では位相角安定度向上や電圧安
定度向上効果が期待できる。LNG(コンバインドサイクル)火力発電機による周波数制御に
7
より、LFC容量を増大することができる。
表1.4
方策名
要求機能
過渡領域(第一
波脱調防止)
位相角安定度
中間嶺域
系統制御により期待される効果
直流送電設備 発電機励磁制 静止型無効電
による系統制
御による系統
御
安定化
力補償装置
LNG(コン
パインドサイ
(STATC
クル)火力発
OM)による
電機による周
系統安定化
波数制御
◎
○
◎
△
◎
◎
◎
○
◎
○
◎
○
◎
○
◎
○
(電力動揺抑制)
向上
定態領域
電圧安定度向
通常運転領域
○
事故時等領域
○
上(電圧変動
抑制)
LFC容量確保
○
◎
◎
注)要求機能は、◎:効果大、○:効果有り、△:効果小、-:効果無、を示す。
LFC:負荷周波数制御(Load
Frequency
Control)
発電機
励磁系
図1.3
直流送電設備による系統制御の例
8
図1.4
FACTS機器、発電機による系統制御
9
1.4
シミュレータ試験装置
電力系統において発生する電気現象を解析するには、実効値ベースの安定度解析プログ
ラムや瞬時値ベース解析プログラムを用いたディジタルシミュレーションによる場合が多
い。しかし本論文で述べるようなパワーエレクトロニクスを応用した機器を扱う場合や発
電プラントの応動のような長時間の現象を扱う場合においは、装置を試作して制御性能の
検証を行うことが効果的である。このためには試作装置を直接電力系統の縮小モデルに接
続して、実験的に装置の特性を調べる必要がある。
電力系統の縮小モデルである電力系統解析シミュレータは、当初は電力系統を直接模擬
した模擬送電線から始まり、発送変電設備をアナログ素子で模擬した交流計算盤等が使用
されていた。1990年には世界最大級のハイブリッドシミュレータAPSA(Advanced
Power
SystemAnalogue
Simulator)が本格運用に入った【ト7】。またほぼ同時期にリアルタ
イムディジタルシミュレータが製品化され複数のメーカから販売されるようになった。
半導体技術の進歩によりマイクロプロセッサの性能が飛躍的に高まり、さらにきわめて
多数のプロセッサを並列動作させることが可能になり、EMTP(Electro-Magnetic
Transient
Program)のような瞬時値ベースプログラムをリアルタイムで演算させるリアル
タイムディジタルシミュレータ(RTDS)が可能になった[用。図1.5にEMTP等で
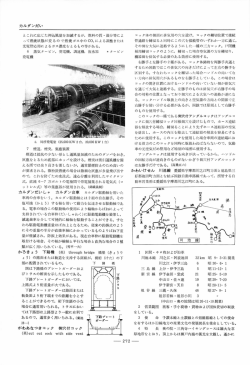
実施する数値シミュレーションの模擬範囲例を示す。図1.6にシミュレータ試験で制御装
置の性能確認を行う場合の装置構成例を示す。図1.7にシミュレータ試験設備の外観例を
示す。本論文で検討した安定化制御方式は、このRTDSを用いて、その有効性を検証し
ている。またLNG火力(改良型コンバインドサイクルプラント)の制御については、ハ
イブリッドシミュレータAPSAでも検証している。
図1.5
数値シミュレーションの模擬範囲例
試作制御装置の模擬範囲
図1.6
シミュレータ試験の装置構成例
10
電力系統シミュレータ
(RTDS)
試作制御装置
図1.7
1.5
シミュレータ装置の外観
本研究の目的
本研究では、FACTS機器や発電機励磁系、ガバナ系の制御により、既存の送電線の
潮流を限界まで高め、発電機の過渡安定度や周波数安定度を限界まで高めることを目的と
する。巨大な電力システムを系統全体として協調して、合理的に運用するという課題を解
決するために緊急状態での信頼度制御に着目し、具体的には、①発電機と直流送電設備の
相互影響として問題となる軸ねじれ振動の抑制制御を実現する、②潮流限界まで運用して
も安定化効果を期待できる発電機励磁制御系や無効電力補償装置制御系を実用化する、③
送電線事故による分離系統でのコンバインドサイクルの発電機による周波数制御を実現す
る、などである。
今後電力自由化が拡大され、新規事業者や分散電源等の供給力の多様化、広域流通の円
滑化が義務付けられるのは確実である。このような系統運用上の不確実性が増大する状況
でも、既存の電力システムには高い供給信頼性や電力品質が要求される。事故波及防止リ
レーシステムのみでは、大規模・複雑化した電力系統における、事故除去後の過渡的な位
相角、電圧および周波数安定度を確保することは困難になりつつある。この対策として交
流電力システムの弱点をその用途に応じて改善するFACTS機器による高速な系統制御
機能を積極的に活用していくことが重要である。
本論文では電力系統の緊急時における系統制御の手法を確立して、その系統安定度改善
効果をディジタルシミュレーションで確認し、シミュレータ試験にて実用化の検証までを
行っている。
1.6
本研究の内容
これまでに述べた観点から、本論文では発電機やFACTS機器による系統安定度向上
を目的として
11
(1)発電機の軸ねじれ振動抑制制御
(第2章)
(2)非線形状態方程式の厳密線形化手法による発電機制御
(第3章)
(3)非線形最適制御STATCOMによる系統安定化
(第4章)
(4)系統解析用コンバインドサイクルモデルの開発
(第5章)
の諸項目を検討し、その安定化制御の具体的手法について論述している。
検討には専ら、ディジタル計算機を使用したが、制御方式の妥当性を検証するためシミ
ュレータ試験を実施した。本論文は5章からなり、第2章以降の内容は以下の通りである。
(1)第2章
発電機の軸ねじれ振動抑制制御【1-9】∼【1・11】
2000年6月に営業運転を開始した紀伊水道直流連系設備は四国の橘湾にある石炭
火力発電所の発生電力の一部を関西に向けて送電するために建設されたものである【1・9】。
タービン発電機には軸系の固有振動が直流送電の定電流制御系との干渉で持続・拡大して
いく現象があり、SSTI(SubsynchronousTorsionalInteraction)と呼ばれている。
この現象は米国の直流送電設備で初めて発生し、対策も可能であることが確認されている。
対象としたタービン系はタンデム型とクロスコンパウンド型という2つのタイプの異
なるもので、これらが直流系と並列に運転した時にも軸ねじれ振動抑制制御を行うことが
要求された。このためこれまでに例のない広範囲の軸系の固有振動(9∼30Hz程度)
に対して軸ねじれ振動抑制制御を行う方式が必要となった。さらに信頼性や実用性の観点
から直流変換所の母線電圧の周波数から軸ねじれ振動を検出して抑制制御に使用するこ
とが求められた。軸ねじれ振動を検出するために、母線電圧から周波数を極めて高速に検
出する必要が発生し、検出精度・耐ノイズ性と検出速度を両立させるという課題に挑み、
実用的に解決している。
(2)第3章
非線形状態方程式の厳密線形化手法による発電機制御【1・12】∼【1・14】
大容量発電機に標準的に設置されている電力系統安定化装置(PSS)は、電力動揺を
抑制するために発電機励磁装置(AVR)に補助入力を与え、系統の安定限界を増大させ
ることができる低コストな装置である。しかし発電機の運転条件や系統構成が変化したり、
運用限度ぎりぎりの非線形な運転領域で運用すると、効果が限定される恐れがあった。こ
のような場合、微分幾何学に基づく厳密な線形化手法を用いた、非線形制御により運用限
界付近でも系統安定度を向上させることが可能となる。
非線形制御はその厳密性のために、モデルパラメータ変動等のモデル誤差に対するロバ
スト性を確保するという課題がある。そこで自端で入手できる発電機有効電力、無効電力
と端子電圧のみから、電力系統の等価モデルを推定し、厳密な線形化のためのパラメータ
に反映させる実用上問題のない手法を開発している。
(3)第4章
非線形最適制御STATCOMによる系統安定化[1-15】
自励式静止型無効電力補償装置(STATCOM)は系統の電圧を制御するもので、電
圧安定度のみでなく、位相角安定度の向上効果もある。このSTATCOMの電圧制御に
非線形制御による補助入力を加えることにより、系統安定度を向上させる検討を行った。
12
近い将来、遠方の発電機の位相角や系統構成の情掛ま比較的容易に入手できるようにな
ると予想される0本章ではこの前提に立って、非線形制御による効果を評価した。系統を
運転点近傍で線形化せずに、非線形を保存したままで制御系を構築する手法は、非線形な
運転領域で今後適用が予想される他のFACTS機器への適用指針を与えるものである。
(4)第5章
系統解析用コンバインドサイクルモデルの開発【1・16】∼【1・18】
ACC(アドバンストコンバインドサイクル発電プラント)は高温ガスタービンと排熱
回収ポイラ・蒸気タービンを組み合わせ、高効率化や高運用性の確保の両立を可能にした
プラントである0従って今後の発電設備に占める比重がますます高くなっていくものと考
えられる。現在、系統周波数変動時のボイラ系を含むプラントモデルの応動についてのプ
ラント挙動解析のニーズが高まっている。そこでACCの電力系統における、動特性を解
析できるAPSA用モデルの開発を進めた。
開発したモデルは大容量プラントをモデルとした大規模なもので、DSP(デジタルシ
グナルプロセッサ)上にソフトウェア模擬している。このDSPで構成されたディジタル
シミュレータをアナログ型シミュレータAPSAと接続してハイブリッドタイプのシミ
ュレータを構成した。今回開発したプラントモデルは、系統事故発生時のACCの応動を
制御系も含め詳細に検討できることを明確にしている。さらにこのモデルは分散電源とし
て普及しているガスタービン電源、コージェネレーションプラントにも応用することがで
きることを示唆している。
1.7
結言
本章では、大規模電力系統の現状と系統安定度上の問題点を述べた。さらに発電機や
FACTS機器を用いた系統制御による安定度向上対策の意義・必要性や検討課題を明ら
かにし、本研究の目的を示した。
第1章の文献
【ト1】電気事業の現状‥「コストダウンと安定供給をめざす、10電力会社のパワーワーク」
電気事業連合会パンフレット(2002.11).
【1-2】正田他
‥
電気工学ハンドブック第6版、p.956(2001.2).
【ト3】電気学会技術報告、第628号:「交直連系系統の相互作用」、
交直連系系統の相互作用調査専門委員会(1997.4).
【1-4】電気学会技術報告、第801号:「系統脱調・事故波及防止リレー技術」、系統脱調・
事故波及防止リレー技術調査専門委員会(2000.10).
【1-5】電気学会技術報告、第869号:「電力系統における常時及び緊急時の負荷周波数制
御」、電力系統における常時及び緊急時の負荷周波数制御調査専門委員会、2002年3月
13
【1-6]藤田:「電力系統運用の柔軟性向上技術に関する研究」学位論文(1995).
rl-7】土井宏祐、後藤益雄、河合忠雄、鈴木智宏、横川純男:「大規模電力系統シミュレー
タの開発」電学論B、110巻9号、平成2年(1990).
【ト8]後藤益雄:「電力系統シミュレーション技術の変遷」電気学会研究会資料
術史研究会
電気技
HEE-02-1(2002).
【1-9]中尾浩之、康瀬昌弘、境武久、川村直樹、宮田博昭、門脇慎、大森隆宏、渡透明彦:「運
用開始となった1400MW紀伊水道直流送電設備」日立評論
Ⅶ1・83No.2(2001.2).
【ト10】山地幸司、田中誠、関田昌弘、真鳥岩男:「大容量火力発電所に連接する交直連系系
統の相互作用と対策」
電学論B,117巻
7号,平成9年(1997).
【1-11]M・Sato,K・Yam再i,K・Kato,M・Sekoguchi,I・Matori,M.Goto:..DampingControlfbr
GeneratorTbrsionalOscillationDuetotheInteractionwithHVDCMInternationalSessionsin
IEEJ-Power&EnergySocietyAnnualConfbrence,No.1140saka(1996).
【1-12】石島辰太郎、島公惰、石動善久、山下祐、三平満司、渡辺敦:「非線形システム論」
計測自動制御学会編(1993.5).
【1-13]J・Wu,A・Yokoyama,Q.Lu,M.Goto,H.Konishi,:,MIMODecentralizedNonlinearC。ntr。l
OfGeneratorandTurbinetoEnhanceTransientStabilityofPowerSystem,"Trans・IEEofJapan,
Vbl.12トB,No.2(2001).
【1-14]M・Sekoguchi,H・Konish,M・Goto,A・Yokoyama,QiangLu:,DecentralizedNonlinear
StabilizingControIUsingState-SpaceLinearization,,inproceedingsoftheIEEEPowerEng・
Soc・WinterMeeting,NewYork,January(2002).
【1-15]M・Sekoguchi,H・Konish,M・Goto,A・Yokoyama,QiangLu:,NonlinearOptimalControI
AppliedtoSTATCOMfbrPowerSystemStabilization,,IEEE/PES
T&DConftrence2002:
AsiaPacific(2002).
【1-16】川内章弘、武蔵貢、広瀬文之‥「アドバンストコンバインド発電プラント」日立評
論
Ⅵ)1.79NO.3(1997.3).
【1-17]ShirouSuzaki,KenichiKawata,MasahiroSekoguchi,MasuoGoto:,MathematicalModel
foraCombinedCyclePlantandItsImplementationinanAnaloguePowerSystemSimulator,,
inproceedingsof
theIEEEPowerEng・Soc・WinterMeeting,Singapore,January(2000).
【1-18】須崎士郎、河田謙一、世古口雅宏、後藤益雄:「系統解析用コンバインドサイクル
発電プラントモデルの開発」電学論B,120巻
8/9号,平成12年(2000).
【1-19]R・RSchulz,W・W・Price‥``Classi丘cationandIdenti丘cationofPowerSystemEmergencies,,,
IEEETrans・PowerApparatuSandsystems,VOl・PAS-103,Pp.3471-3479(1984).
【1-20】電気協同研究会‥「電力系統と機器のシステムコーディネーション」、電気協同研究、
第52巻
第2号、pp.72-75(1997.3).
【1-21]電気学会技術報告、第743号:「電力系統の電圧・無効電力制御」、電力系統の電
圧・無効電力制御調査専門委員会(1999.9).
14
第2章
2.1
発電機の軸ねじれ振動抑制制御
はじめに
直流送電設備との相互作用により引き起こされる直近発電機の軸ねじれ共振の抑制対策
について述べる。大容量直流送電設備近傍で発電機が運転される場合で、大きな負荷変動
等の外乱が生ずると直流変換器の制御特性と発電機の軸ねじれ振動が発生する。その振動
は相互に作用し合い、場合によっては振動が拡大し、機器の揖傷に至る可能性がある。こ
れらの現象は直流系と発電機軸ねじれの相互作用として文献[2-1]の報告をきっかけに各所
でその現象の究明や対策方法が研究され、多くの事柄が解明されてきた[2-2][2-3][2-4]。こ
れらの多くの論文や報告書は解析上の検討が主であり、実機に適用する場合の問題の提起
と解決策については必ずしも十分とは言えない点があった。
この現象はSSTI(Subsynchronous
TorsionalInteraction)と呼ばれる。超高圧直
流送電システム(HVDC)が計画される場合、SSTI発生の可能性を事前に検討する
ことが必要である。SSTI研究を、HVDC(1400MW、±250kV)変換所の
近くに接続された火力発電所(2台の1050MWのクロスコンパウンド型タービン発電
機および1台の700MWのタンデム型タービン発電機)を対象として行った。検討の結
果、タンデム型発電機が単独で直流送電設備に接続された状態で送電する場合にSSTI
が発生することが判明した[2
7]。
本章では、発電機軸ねじれ振動分析の手法を述べ、軸ねじれ抑制制御系設計の考え方を
述べている。軸ねじれ振動の分析には多大な労力と費用を要するため、分析手法を使い分
けて効率的に設計を行っていくことが重要である。さらに制御装置の設計に密接に関係す
る軸ねじれ振動を検出するセンサの開発についても述べている。軸ねじれ振動検出センサ
には以下の特徴があり、これらを開発目標とした。
(1)変換所自端母線の電圧信号のみから検出できる。
(2)5∼30Hzの軸ねじれ振動を小さい無駄時間遅れで検出できる。
(3)5∼30Hzの軸ねじれ振動を小さいゲイン低下で検出できる。
(4)母線電圧に過渡的に直流成分や高調波が重畳しても検出精度の劣化が小さい。
(5)欠相事故やセンサ単体故障に対しても最低限の検出性能を維持する。
直流送電設備に設置する2つの実用的な軸ねじれ振動抑制制御を検討し、変換所の母線
電圧を使用する抑制制御方式が有効であることが、時間領域数値シミュレーションやシミ
ュレータ試験にて確認できた。さらに開発した軸ねじれ振動抑制制御装置は実機に適用さ
れ、タービン軸の軸ねじれ振動を安定化することを確認している。
ー15
2.2
直流送電設備に伴う軸ねじれ振動現象とその発生メカニズム
2.2.1軸ねじれ振動現象
火力や原子力用発電機の軸系はその軸ねじれ振動固有周波数が定格周波数(50、6
frequencyと呼ばれる。
OHz)より低い数Hz∼50Hzにあり、これはSubsynchronous
図2.1に示すように発電機が接続される外部系統の状況によっては、発電機回転子に軸
ねじれ振動の固有周波数に近い脈動軸トルクが発生し、共振条件が加わると大きな軸ね
じれ振動となる。この現象をSSTI(Subsynchronous!orsional!nteraction)と呼んでい
る。場合によっては軸の破損等に至る。
このような現象を引き起こす外部系統としては、
(1)交流送電の直列コンデンサ補償系統
(2)発電機近傍に直流変換器などの高速電力制御機器が設置された系統
で、実系統でいずれも軸ねじれ振動の拡大現象を経験している。直列コンデンサ補償系
統による軸ねじれ共振現象をSSR(Subsynchronous
図2.1
Resonance)と言う[2-5j。
軸ねじれ振動現象の要因
相互作用を起こす構成要因として、発電機PSS、直流送電設備、SVC、高速ガバ
ナ制御系、可変速機が挙げられる。それらは高速で制御または応答するため、50又は
60Hz以下のSubsynchronous
frequencyで変化する発電機電力や回転子速度との共振
がSSTIの潜在的な原因となる。
(1)発電機PSS
発電機PSSは、0.1∼2.OHzの極低周波の動揺を抑制する制御システムである。
PSSの帰還信号や制御パラメータに不整合があると、軸ねじれが増大することがあり
うる。この対策として、PSSループ内に軸ねじれフィルターを設ける。
(2)直流送電変換器制御
直流送電変換器は、広い周波数帯域を含む直流電流を発生する。直流送電変換器は、
交流系の低周波振動(0.1∼2.OBz)に対する安定性を高めるために定電力、定電流、
ー16-
定電圧制御ループを使用しており、これが潜在的にタービン・発電機の軸ねじれ振動モ
ードを含んでいる。変換器制御の特性改善、電流制御への振動抑制制御(SSDC)の
追加によりこの間題は解決できる。
(3)調速機
電気式調速機は、タービン・発電機に低周波振動を起こす場合がある。電気式調速機は
応答速度が速いため、タービン発電機の固有振動数と共振する恐れがある。従来の機械
油圧式調速機は軸ねじれ振動を引き起こさない。
軸ねじれ振動現象発生メカニズム
2.2.2
直流制御系による負制動現象による共振につき、その発生メカニズムを述べる。発電機
回転子の回転速度〟。がゆらぐと、近傍直流変換所の交流側電圧レ∂Cは振幅と位相が変化
する。この交流電圧の過渡的な位相変化が変換器の制御角に与える影響を図2.2に従っ
て説明する【2▼6j[2-14】。
位相変化前〃∂。(定常状態)
α=〃〟変化後の実際の制御遅れ角(α=α/+¢)
α′=〃∂。変化前の定常時の制御遅れ角
β=〃β。変化後の実際の制御進み角(β=β/-¢)
β′=〃。。変化前の定常時の制御進み角
図2.2
変換器交流側電圧位相の変化と制御遅れ角、制御進み角の変化の関係
今、発電機回転子が加速し、変換器交流側電圧すなわち転流電圧の位相が破線のごとく
¢だけ進んだ場合を考える。最近採用されている等間隔パルス制御方式において、位相制
御のための基準電圧は変換器交流側電圧の軸ねじれ振動周波数帯における急激な位相変
化に即応しないので、実際の制御遅れ角αはα=α′[〃β。変化前の制御遅れ角]+¢と
なり¢だけ増大する。その結果、順変換器側の直流電圧g。′が低下する。この直流電圧
が低下すると、直流電流′。も直流系統の特性と順変換器の定電流制御特性に従って低下
する。直流送電電力P。は直流電圧と電流の積として変化し、それに従って発電機回転子
-17-
に加わる電気トルクreが変化する。この間の因果関係を図2.3にまとめる。
電気的ダンピング係数β。
=実数部†』re/』〟Gl
発電機回転子の回転速度変化△〟。
に対する発電機トルク変化』r.の位
相差が90度を越えると電気的ダンピ
ングが負になる。図2.4参照。
負の電気的ダンピングが軸系固有の
機械的ダンピングより大きくなると
SSTl発生。
図2.3
軸系ねじれ振動との共振現象発生の因果関係
発電機回転子の回転速度の変化』〟cに対する発電機電気トルクの変化』reの遅れが
位相的に90度を超えると、発電機と交直連系系統から構成される電気系が負のダンピン
グトルクを発生するようになる。その大きさが軸系固有の機械的ダンピングトルクを打ち
消すほど負側に大きくなると、軸ねじれ振動の負制動現象が発生する。
次に、この間の各状態量の変動の位相関係をベクトル図を用いてさらに詳しく考察す
る。
図2・4は、軸系の低次固有振動数〟(5∼20Hz程度)で発電機に回転数変動
のゆらぎ』〟cを与えたとき、各状態量の変動分のベクトル関係を』〟cを位相の基準に
とってフェーザ表示した例である。
』鳥
』ん
』α
』α¢
図2.4
状態量変動のベクトル図
18-
この』〟cに対し花/2だけ遅れて変換所交流電圧の位相変動』♂√が発生する。この
△♂rが直接変換器の制御角変動』α¢をもたらす0直流電圧変動』g山は』α¢に対し逆
位相になる0直流電流変動』′。は△g。√に対して一花/4∼花/4の範囲内の位相で変
動する0定電流制御はこの』′dに対しほぼ花/2だけ位相が遅れた制御角変動』α。を
もたらす0したがって、実質的な制御角変動』αは』α¢と』αcのベクトル合成である
ので、』αの位相は』〟。に対して0∼一花/2の範囲内にある。一方、発電機の有効電
力変動』Pgは、△αとはぼ逆位相で変動する。この結果、最終的に得られた発電機電気
トルク変動』reは、』〟cに対して花/2∼花の範囲の位相を示す0すなわち』〟cと
』reの位相差が冗/2以上となることから、電気的ダンピングβe(=実数部(』二r。
/』〟c))は負となり、軸ねじれ振動が成長する。
2.2.3
発生の主要因
軸ねじれ振動現象発生の主要な要因について調べてみる。
(1)ユニット相互作用係数(UIF)
EPRI(Electric
Power
ResearchInstitute)の研究プロジェクトによれば、特定
の発電機の軸ねじれ振動に対する直流制御系の影響の度合いをユニット相互作用係数
(UIF‥UnitInteractionFactor)により数量化できるとある。[2-2]これを(2.1)
式と定義する。
吼=畏[ ]
1__竺至
ぶC
(2・1)
れ)r
ただし、〟-㌔。‥直流系統の定格電力、〟Ⅴ月。:発電機の定格容量、
5Cr。T:対象発電機を含んだ短絡容量(直流送電設備交流母線からみた)
5CG:対象発電機を取り除いた短絡容量
この係数U′ダcは、計画中の直流送電(または連系)設備により近傍の発電機に軸ね
じれ振動が発生するかどうかを判断する目安を与える。EPRIにおける多数のケースの
検討結果から、UIFが0.1より小さい場合には、軸ねじれ振動の負制動現象発生の可
能性ははとんどないとしている。したがって、その場合には軸ねじれ振動抑制制御対策の
必要性はまずない。
発電機容量に対し直流送電設備の容量が大きいと係数U′ダcは大きくなり、また対象
発電機の短絡容量がその発電機を含む系統全体の短絡容量に占める割合が大きくなり、条
件が厳しいことがわかる。いい換えれば、発電した電力をすべて直流で送電するような直
流単独送電系統の場合が最も厳しい。
ー19-
(2)逆変換器側における相互作用
逆変換器側では逆変換器の転流失敗を防止するためには、短絡容量の大きな系統に接続
するとともに、直流系統からの受電電力と逆変換器側に接続された発電機の出力とを同時
に消費するために大きな負荷を変換所の近くに設置するとよい。
また、逆変換器は通常定電圧制御(AVR)で運転されているが、このAVRは軸ねじ
れ振動に対してほとんど応答しないので定電圧制御系が軸ねじれ振動に干渉することは
ない。
これらの特性は、逆変換器側の発電機への直流系の影響を少なくする方向である。以上
のような理由で、順変換器側で軸ねじれ振動の負制動現象が問題となる場合があっても逆
変換器側で問題となることはない。
(3)火力・原子力機と水力機
火力・原子力機は発電機よりもタービンのはうの慣性モーメントが大きいため軸ねじれ
固有振動数は低い。一方、水力機は発電機に対してポンプ・水車の慣性モーメントが小さ
いため軸ねじれ固有振動数が高い。したがって、火力・原子力機で軸ねじれ振動の共振現
象が問題となることがあっても、水力機ではほとんどない。
クロスコンパウンド機は軸ねじれ振動特性の異なる2台の発電機が常に並列運転され
るため、互いに正のダンピング効果を発生し、軸ねじれ振動が発生しにくい。
(4)軸系固有振動数
その振動数が低いほど厳しい。特に、火力・原子力機の軸系に存在する低次モード(特
に1次)のねじれ振動周波数が問題になることが多い。周波数が低い領域でのみ負の電
気的ダンピングを生ずるためである。
(5)定電流制御系の特性
定電流制御系の過渡ゲインが大きいはど軸ねじれ振動発生領域が広くなる。これは、直
流電流変動に対する制御角変動が負の電気的ダンピングを増加する方向に動くためであ
る。
(6)直流送電電力
直流送電電力(電流)が大きいはど厳しい。これは、発電機電流が大きいことを意味し、
発電機回転数偏差』〟∫に対する電気トルク変化△r。が大きくなって、負のダンピングト
ルク(』r/』〟c)が大きくなるためである。
(7)制御角
制御角αが大きいほど厳しい。直流電圧変動はsinαに比例するため、同じ制御角変
動でもαが大きいほど直流電圧変動が大きくなることによる。
(8)直流リアクトル
インダクタンスが小さいはど厳しい。これは直流電圧変動に対する直流電流変動が大き
くなるためである。
20-
2.3
解析手法
直流系統とタービン・発電機軸系ねじれ振動との相互作用を解析するための手法と手段
について述べる。表2.1は解析手法、解析内容とそれぞれの特徴をまとめたものである。
ユニット相互作用係数は交流系統の短絡容量から容易に計算することができ、厳しめの
評価となるため軸ねじれ振動発生の有無を予測するために使用される。ユニット相互作用
係数による評価で、軸ねじれ振動発生の可能性がある場合には周波数街域解析を行う。
周波数街域解析では発電機ダンピング特性、励磁系特性や直流送電設備の制御系等の詳
細条件をモデル化して計算するので、より正確な評価となる。ダンピングトルク係数の解
析は周波数変化によるダンピングトルクが表示されるので、制御系の設計が容易になる。
制御ブロックの時定数変化の影響を詳細に評価するような微妙な解析には、固有値解析が
適している。今回のプロジェクトでは基本制御系時定数は既に決定していたため、軸ねじ
れ振動抑制制御系設計のため、周波数領域解析のうちダンピングトルク係数解析を採用し
ている。
時間軸領域の解析では非線形特性を考慮でき、制御系の過渡的な応動も評価することが
できる。ただしモデリングや計算に多大な労力と時間を要するので、周波数領域解析で問
題のあるケースのみに絞った評価を実施するのが実用的である。
表2.1
解析手法
ユニット相互作
用係数(UIF)
軸ねじれ振動解析手法
解
析
内
容
特定の発電機の軸ねじれ振動に対する
直流制御系の影響の度合いを計算する。
特
徴
直流送電設備計画時点で軸ね
じれ振動発生現象の可能性を簡
易に判定できる。
周波数領域解析
(1)軸ねじれ振動に対するダンピングトル
ク係数を求め安定判別を行なう。
軸ねじれ振動周波数と軸ねじ
れ振動安定性の関係が明確にな
る。抑制制御装置の設計に必要。
(2)固有値解析
制御系定数等のパラメータ
固有値より振動周波数と減衰特性(ダン
サーベイに適する。
ビング)を求めて安定判別を行なう。
時間軸領域の
解析
(1)EMTP等のシミュレーションプログ
非線形特性を考慮することが
ラムにより軸ねじれ振動の時間変動をシ
可能。安定性や抑制制御装置の
ミュレーションしその挙動から安定性を
効果確認に必要。
判別する。
(2)シミュレータによる解析
現象をリアルタイムで発生さ
せることができる。試作した制
御装置の検証が可能となる。
ー21-
2.3.1
ユニット相互作用係数(レナダ)
直流変換器の出力を』PβCだけ変化した時、発電機の出力変化が△PJだけ変化する時
の、発電機電流の応答感度を考える。
」上ごし・t・・:′
G00
Glll
」Jご′こ
図2.5
軸ねじれ振動発生の簡略モデル系統
図2・5は軸ねじれ振動発生の簡略モデル系統を示しており、このモデル系統は直流変
換器の至近にある発電機Glと交流系統G∞から構成される。図2.5で直流変換器の出力
変化により、電流が』′βCだけ直流変換器に注入されたとすると、対象発電機Clの電流
変化』′〝ノは
′け(;JJ000
---竺-し・』′βC一面
ぷ壌
(2.2)式より
g2
』JGノ=
ルnl′Ⅳ
7完了----●』JβC
l‥、川ニー1・
一\■′ト.ト
22-
(2.2)
△JGl=
(2.3)
=【/肝云△Jβ。
(2・3)式よりユニット相互作用係数U古㌔は直流変換器の電流変化』′β。に対
する対象発電機の電流変化』′。上の割合であることがわかる。
軸ねじれ発生の可能性をスクリーニングするため、ANSI/IEEE規格1030
-1987ではこのU㌧㌧Fの規定があり、U㌧㌧Fの値が0.1を超える発電機については
更に詳細に検討すべきとされている[2-2]。
2.3..2
周波数応答法
直流系統と発電機軸系の相互作用の等価ブロック図を図2.6に示す。図中に示した2つ
のスイッチを同時に開放した状態での回転速度変化』〟cに対する電気的トルク変化△rど
の伝達関数Ce(S)を求め、角周波数〟に対する周波数応答を求める[Z-1][2-2]。
Gビ(j〟)=』r。(j(リ)/』〟。(j〟)
(2.4)
=βe(j〟)-j(〟5/〟)〝e(j〟)
ここで、βe(j〟)‥電気トルクのダンピング特性
〟∫:系統基準各周波数
吼(j〟):電気トルクの同期化力持性
一方、軸系の機械的ダンピンク係数β皿は蒸気の流れによる摩擦、風損および軸回転損な
どからなり、正のダンピングとなる。軸ねじれ振動は図2.7に示すごとく、これら電気ダ
ンピング係数と機械的ダンピング係数の和(βe+β皿)が負となった場合に、すなわち
βe<-β皿になった場合に軸ねじれ振動は発生する。
この周波数応答法では、各軸ねじれ振動モードの安定性を個別に解析することになり、
どちらかといえば簡単な系統の解析に向いている。
このDmは発電機の負荷状態によって異なり、無負荷時(NL)、全負荷時(FL)、でDm
はそれぞれ最小、最大となる。安定判別は図2・7で縦軸+方向にβ逐、一方向にββを軸
の共振周波数点にてプロットし、ββがβeの曲線の上側に出れば不安定、出なければ安定と
判定する。
23
電気的ダンピング係数βe=実数部(』∴r/』〟。)
図2.6
相互作用の等価ブロック図
NL:無負荷時の機械的ダンピンクβ皿
FL:全負荷時の機械的ダンピンクβ皿
図2.7
2.3.3
電気ダンピングβeの周波数特性
固有値法
直流系統・制御系、交流回路、発電機、発電機制御系を含むタービン発電機軸系の線
形化状態方程式から、状態変数に関する係数行列の固有値を求め、固有値の実部の正負の
符号から安定性を判別する。軸系は、図2.1に示すように、タービン、発電機など複数の
剛体はバネおよびダンパーで接続されているものとする[2-3〕。直流系統は抵抗、インダク
タンスと静電容量による集中定数回路でモデル化される。
この固有値法は、多機系(計算誤差などの関係で10機程度が限界である)における発電
機間の動揺モードの安定性、軸ねじれ振動モードの安定性、電圧安定性などの総合的な安
定性解析に向いている。
-24-
(1)固有値解析と解析結果の例[2【3]
図2・6に示したモデルで機械ダンピングβ〃を与え、電力系統、各種制御系の相互作用
を考慮した形(閉ループ)で固有値を求めた。図2.8aに定電流制御ブロックを示す。
表2・2に示す直流ACR定数によるパラメータサーベイを行ない、固有値軌跡を求めた
結果の例を図2・8bに示す0直流ACRの応答が遅い場合(時定数Tlが0・2秒の場合)
に振動が収束する。
図2.8a
定電流制御ブロック
表2.2
固有値解析条件
直流ACR特性
1+r25
C(㌧ノ
ケースNo.
図2.8b
2.3.4
=10×
1+rJ5
rJ
r2
6
0.1
0.005
2
0.2
0.005
3
0.05
0.005
固有値解析結果の例
時間嶺域シミュレーション法
直流系統・制御系、交流系統、発電機、発電機制御系、タービン発電機軸系に関する
微分方程式を立て、時間額域の数値シミュレーションから安定性を判別する。この解析
には汎用のシミュレーションツールであるEMTP(Electro-Magnetic
Transients
Program)とか、特に直流送電の解析に便利に作られたEMTDC(Electromagnetic
Transients
2.3.5
Simulation
Program)などがよく利用されている。
リアルタイムシミュレータ
交流連系系統の変換器、交流/直流系統、制御装置、発電機、軸系などを実際のミニ
チュアモデルや等価模擬モデルで構成するもので、リアルタイムシミュレータと通称して
いる。実現象に近い応答を実時間で得ることができる。
ー25-
上記の2.3.2∼2.3.4がディジタルコンピュータによるオフライン解析である
のに対し、これはアナログまたはハイブリッドの装置によるリアルタイム解析である。シ
ミュレータにおいては、通常アナログモデルで構成された要素の抵抗成分が実機より相対
的に大きいため、実機に比し損失の割合が大きいとか、その結果、現象の振動減衰が相対
的に速いとかの問題がある。しかし、最近の技術進歩は大きく、抵抗成分の小さな要素の
開発、抵抗分の補償方式の開発、モデル構成・変更・定数設定の自由度向上などが進み、
シミュレータによる解析結果はますます実現象に近づいている。
2.4
抑制対策
2.4.1
軸ねじれ振動成分検出信号の選定
軸ねじれ振動抑制制御は、軸ねじれ振動信号を何らかの方法で検出して、直流系の点
弧角を制御し、図2.7に例示した電気ダンピング係数を正方向に移動させる(ダンピン
グを増大)ことを目的とする。SSDC(SubsynchronousI)amping
Control)に入力する
軸ねじれ信号の検出方式の主要方式を表2.3に、各制御方式の概要を図2.9に示す
【2→7】
表2.3より、SSDCタイプ1は変換所交流母線の電圧周波数より軸ねじれ信号を検
出する方法であり、直流電流制御特性を劣化させず、かつ通信回線を介した遠方端との
信号伝送を必要としない実用化できる最も現実的な方法である。この場合の課題は、発
電所から離れた地点にある変換所母線電圧の周波数から軸ねじれ振動信号を検出出来る
条件を明確にすることと、それを検出する高精度周波数センサの開発にある。
表2.3
方式
S
S
DC
タイプ1
軸ねじれ信号検出方式の比較
長所
検出信号
変換所交流母
線電圧の周波数
・直流電流制御特性に影響
なし
短所
・高速・高精度の周波数検
評価
○(良)
出器が必要
・遠方端との通信回線を経
由した信号伝送は不要
SSDC
直流変換器の点
タイプ2
弧角
従来方式
発電機軸の角速
度
・検出装置が簡単
・電流制御特性が劣化
△(可)
・直流電流制御特性に影響
・軸ねじれ振動成分信号の
△(可)
なし
通信回線を経由した通
・軸ねじれ振動成分を正確
に検出可
信伝送が必要
・ユニット毎にセンサを設
置する必要あり
ー26-
発電機
(a)検出信号:母線電圧の周波数(SSDCタイプ1)
発電機
(b)直流変換器の点弧角(SSDCタイプ2)
発電機
(c)検出信号:発電機軸の角速度(従来方式)
図2.9
軸ねじれ振動の信号検出位置と制御方式
ー27-
2.4.2
抑制制御ブロック設計の考え方t2
7]
(1)SSDCタイプ1
変換器端の交流側電圧の周波数変化A
Fを検出してSSDCの入力信号とする。設計の
考え方は以下の通りである。図2.10は発電機の角速度の微小変化に対する、系の変動状
況を示すブロック図である。国中のスイッチはタービン発電機軸ねじれ系は除いて考える
ことを示している。月(カ、β(カ、C(カ、」D(カは伝達特性で月(カは角速度偏差』(リ。か
ら発電機電気トルク変化』∵re、β(カは制御角』αから』re、C(カは△〟。から変換所
交流母線周波数偏差A
fへの伝達特性を示す。F(s)tまSSDCの
f、D(j)はAαからA
伝達関数である。∠1〟。から』reへの総合伝達特性のうち』〟。と同相成分がダンピングト
ルクとなる。図2.10で△a)。からATeまでのSSDCを含んだ総合伝達関数G(s)は
G(∫)=旦
△のG
(2.5)
ダ(ぶ)
=A(∫)+β(∫)C(ぶ)1+F(∫)β(∫)
F(s)/「1+F(s)・D(s))はSSDC制御系の閉ループゲインを表し、交流系統
との相互干渉により不安定となる恐れがあるため、あらかじめ一巡伝達関数ダ(∫)・β(カ
のゲイン一周波数特性により安定性を確認しておく必要がある。
G(5)の実数部である電気的ダンピングトルク係数βeが+1.0となるためには、
F(∫)
(月(カ+β(カC(カ
)=1.0
(2.6)
1+F(∫)か(∫)
従って、理想的なSSDCの伝達関数F(s)は、
(1-A(∫))
F(∫)=
(2.7)
β(∫)C(∫)-β(∫)(1-A(ぷ))
このようにして得られたSSDCの制御ブロックの例を次式に示す。
5000
F(∫)=∫2+464∫+210251+0.003∫
∫
∫2+94.2∫+222029
∫2+942血+222029
(rad/p.u.Hz)
(2.8)
図2.11は(2.8)式の周波数-ゲイン特性と周波数一位相特性をそれぞれ表している。
この特性は周波数14.7Hz付近でピークを持つバンドパス特性を示している。またノッチ
フィルタにより周波数75HzでゲインがO
dB以下になるようにしている。図2.12にダ
ンピングトルク係数の改善例を示す。SSDCはダンピングトルクカーブを周波数10∼
30Hzの範囲で正方向に移動させてダンピングを改善する作用のあることがわかる。
図2.13はSSDC閉ループ系の一巡伝達関数K(s)・D(s)のゲイン一位相特性
例を示している。位相が-1800
となる周波数におけるゲインのうち最大のゲインが0.
3となっている。これはゲイン余裕が10dB確保できていることを示している。なお
ー28-
伝達関数β(カの周波数特性を図2・14に示す0」D(∫)には周波数75日zにおいてゲイ
ンが3・0のピークがある0
これは変換所母線周波数を用いて軸ねじれ振動抑制制御を実
施する場合、直流送電設備と変換所交流系統との相互作用が周波数75.0日zで大きくなっ
ていることを意味している0この相互作用の結果であるβ(∫)のゲインのピークを抑制
するため、SSDCの伝達関数F(s)に図2.15に示すような周波数特性を持つ、75
Hzのノッチフィルタを挿入している。
図2.10
発電機角速度偏差から電気トルクまでの伝達関数
軸ねじれ振動周波数に対するダ
75・OHz
ンビングを改善する014・7Hz1
20
母線周波数検出による相互作用
(内部 制御ループF(s)→D(s))
を抑制Jする。
ゲイン
0
(dB)
-20
SD
-40
10-1
ヽト
C
6
100
101
102
103
100
101
102
103
100
位相
0
(度)
-100
-180
灯1
周波数(Hz)
図2.11
SSDCの伝達関数F(s)
29-
解析対象モデル
700MW
タービン
ダンピングト
ル
ク
係
数
(p.u.トルク
/p.u.速度)
写器普 家き撃篭曇悪霊虚空夢眉二貰盲屋
の
窃
lT
.ii
■
透
馨り
t
図2.12
Fr叫u亡nCy(日工)
10
周波数(Hz)
SSDCによるダンピングトルク係数の改善例
(タンデム型発電機が直流送電設備に直結の場合)
30-
∵‥.て.:.こ「・〓
.は抽
棚
卸
100
FREQUENCYMヾHz
周波数(H
図2.13
z)
SSDC内部ループ周波数特性
-31-
10
ゲイン
1
(abs)
0.1
0.01
0.001
0.0001
200
位相
(度)100
10
100
周波数(Hz)
図2.14
伝達関数β在ノの周波数特性
ゲイン(dB)
-10
ノッチフィルタの伝達関数_20
∫2+94.2∫+222029
-30
100
∫2+942.如+222029
101
位相(度)100
0
101
102
周波数(Hz)
図2.15
75Hzノッチフィルタの周波数特性
-32-
103
2.4.3
軸ねじれ振動抑制制御装置の構成【2
7〕
図2・18に軸ねじれ振動抑制制御(SSDCタイプ1)の全体構成を示す。SSDC
はタイプ1を採用したo
SSDCは軸ねじれ振動の発生を検出し、さらに交流系統におけ
る送電線のルート断の条件が成立した時にのみ作動する。
変換所母線電圧から周波数を測定し、その主成分周波数である5∼30Hzが設定値を
超過したら、軸ねじれ振動が発生していると判定し、交流系統の条件による軸ねじれ抑制
制御の起動指令とのAND条件で抑制制御を作動する。抑制制御が作動してから一定時間が
経過しても5∼30Hzの振動成分が小さくならない場合には、抑制制御が有効に作用し
ていないと判定して、警報信号を近傍の発電所に送信する。なお周波数に5∼30Ⅲz以
外の成分が現われている場合は他の要因による振動が発生していると判定して、軸ねじれ
抑制制御は作動しない。
タービン一発電機軸系の複数の固有振動モードのうち、不安定モードによる周波数成分
が変換所の母線電圧に重畳し周波数変動として現われる。母線電圧から軸ねじれ振動周波
数成分のみを選択抽出する帯域フィルタを用いて、軸ねじれ振動の発生を検出する。ディ
ジタル解析等によりどの周波数街域でどの発電機に軸ねじれ共振が発生するかをあらか
じめ予測しておけば、感度よく検出するよう帯域フィルタの周波数ゲイン特性等を調整し
ておくことができる。
変換所母線
図2.18
軸ねじれ振動抑制制御装置の構成
33
軸ねじれ振動検出器の開発
2.5
2.5.1
目標性能
周波数帯域が広く、速応性が高く、かつ信頼性の高い軸ねじれ振動周波数検出装置の開
発を目指す。軸ねじれ振動抑制制御及びその作動指令、軸ねじれ振動持続の判定のために
は、5∼30Ⅲzの軸ねじれ振動周波数領域だけでなく、それ以外の領域の周波数も正し
く検出する必要がある。すなわち直流変換所の母線電圧の周波数変化のみから発電機軸ね
じれ振動を検出しようとしても、その振動成分信号は微小であり、かつ一般にはそれ以外
の電力動揺成分や高調波等の周波数成分(0.1∼5.OHz,30∼180日z程度)も含
んでいるからである。
2.5.2
振動検出方法の検討
(1)周期計測による周波数検出方式
発電機の軸ねじれ振動波形と発電機の電圧波形との関係を見る。発電機回転子が回転方
向にねじられる状態では、軸が相対的に加速されるので電圧周波数は定格値(平均値)よ
り高くなり、逆方向にねじられる状態では、相対減速されるので、電圧・周波数は低くな
る。即ち、発電機電圧波形は軸ねじれ周波数でFM変調される。例えば、2極機、60Bz
の発電機の場合、軸ねじれ周波数を15Hzとすれば、軸ねじれ現象は電圧波形の4サイ
クル毎に疎または密波を繰り返す波形となって現れる。
SSDCに用いる軸ねじれ検出センサを開発するに当たり、センサに要求される周波数
検出精度、分解能、応答速度などの性能を決める必要がある。まず周波数検出方法として
周期計測法を採用することとして、その計測の具体的な処理方法を検討する。表2.4に
実用的と考えられる検出処理方法とその特徴を示す。
34-
表2.4
検出方式
NO.
1
周波数検出方式の比較(電源周波数60Hzの場合)
長所
一相全波方式
・直流分
の影響小
←⊥→
〟∂
//\\
」-十・¶m-「一-「一「
短所
・計測遅れ
検出
精度
検出遅
評
限界
限界
れ時間
価
30Hz
15Hz
16.7ms
×
時間大(1
不
サイクルで計
可
1ノ1
u
測)
ノ呈J//今
2
・計測遅
一相半波方式
T
れ時間小
・直流分重
60Hz
30Hz
8.3ms
畳時誤差
○
良
H
大
′′/\
\′′\ノ
戸J//うテ
3
三相半波方式
180Hz
・計測遅
90Hz
8.3ⅢS
れ時間小
◎
優
′=掟+去+完〕
4
三相全波方式(検出値の更新
は半サイクル毎)
・直流分
の影響小
・計測遅れ
時間大
′=程+妄+妄〕
35
90Hz
45Hz
12.5ms
○
良
前述したように軸ねじれ信号は母線電圧周波数をFM変調するので、表2.4の各検出
方法が、FM変調波から軸ねじれ信号を検出する場合の精度を調べた。表2.4の各方式
をEMTPによりモデル化し、この検出器モデルにFM変調波を入力し、シミュレーション
により検出される信号を評価した。変調周波数は軸ねじれ振動検出が必要とされる範囲の
値として、′皿=10、15、30、35,45,130(Hz)について検討した。また、
直流分の影響を評価するため、直流分の重畳も考慮した。
(2)一相全波方式と一相半波検出方式との比較
シミュレーション結果の例を図2.20に示す。図から明らかなように、変調周波数が
30Ⅲzになると、検出方法の違いにより検出波形は大きく異なってくる。一相全波方式
(等価サンプリング周波数60鮎)では振幅1.OHzの変調信号に対し、振幅0.6、4Hz
の動揺信号として検出されるが、精度的には限界である。図2.19(a),(b)に一相全波方
式と一相半波方式の検出原理を示す。一相全波方式は電圧波形の零クロス点から一周期を
求め、周波数を検出する方式である。検出遅れ時間は大きいが母線電圧直流分の影響を受
けにくいという利点がある。
一方、一相半波方式は電圧波形の零クロス点の間隔から周波数を求める方式であり、計
測遅れ時間は小さいが直流分の影響を受け、検出誤差が発生する場合がある。
(3)一相半波と三相半波検出方式の比較
シミュレーション結果の例を図2.21に示す。図から分かるように、変調周波数が
130Hzになると、一相半波方式(等価サンプt」ング周波数120Ⅲz)ではサンプt」ン
グ間隔が粗いため、変調信号を正しく再現できていない。しかし三相半波方式(等価サン
プリング周波数360Hz)では130Hzの変調信号を再現できている。
図2・19(c)に三相半波方式の検出原理を示す。a,b,C各相の周波数を一相半波方式
で検出し、それらの三相平均値を取る。各相の検出値を逐一採用していけば、2.78ms
毎にサンプリングしていることになるが、三相の平均値をとるため等価的に5.56ms
の検出遅れ時間となる。三相の平均値を取ることにより、電圧波形への直流分の影響を緩
和することができる。また欠相事故時や周波数検出器単体故障時にも、健全相の検出器に
より最低限の機能を維持することが可能となる。
36
〃∂(直流成分含有)
石・=1/1
(b)一相半波方式
〃∂(直流成分含有)
〃ム(直流成分含有)
〃。(直流成分含有量少)
(c)三相半波方式
図2.19
周波数検出方式の比較
37
..暮
囁琵(宅き
あこ■
可蔓囁喝卿は
衝撃乙辱j
モー,
、〓い
十∵
■
奄
棋暴攣
弟艶軽薄潜l
為〓‥盲
吾1i!ヾ
j文一メく
長∼蕾ぎ⊥
事さJiま
-り〓
-■.Fi一-・--I-∼芦`¥
Aびノ1鋸ヨ鋸都撃
員拍
…射噸蠍乳用挽
Jト、、
鞋¶!●い・■
/‥ヽ.
変調された
電圧波形
変調信号
…チ去一二=去
ヽ
(軸ねじれ信号)
馬渡敦抱き
芦愉彗離籍
三
章
i
捌鑓鴎
「n鵬
∧■∼'も
㍉-り
検出信号
㍗叫‥
.∴∴∴∴主;
≠
t‥∫■
茎
-i.ミ・さ
一相全波方式
(方式No.り
検出信号
冨鼠‡芸Lヂ
一相半波方式
(方式No.2)
㌔一<
(a)変調周波数=10Ⅲzの場合
変調された
電圧波形
変調信号
(軸ねじれ信号)
き詔濃艶g板き
F軒l髄)諷雲浪ノ!F豊
検出信号
腎㌢競闘諦薫
し章+:L
8ゥあ
一相全波方式
(方式No.1)
一房
切手詩
阿藤●
∴叶∴、∴
〔iミ■-
検出信号
試買
転塾
終慨rぬ
佃
(b)変調周波数=30Ezの場合
図2.20
一相全波と一相半波検出方式の比較
38
一相半波方式
(方式No.2)
(a)変調周波数=30Hzの場合
璧待芳澄諺:、ri7■
■・Jしヽ▲一'▲.
-ヽt
トrl
・_l・
‡】
て
」〟
野撃巧 ∈車重.
t,
検出信号
二…ニi_.∴い.一
幸
一相半波方式
(方式No.2)
●
一
i卓1.●J
㌻
蒙
鎚僻■
島斗一
∴・・●、
検出信号
三相半波方式
掃C
∴、、_
J〆㌔㌧亀,碍瀧㈲
ち還・遠㌃「表㌃「遍㌻「誉
こl、む
ゝ.
気ぎここご∴∵-‥.て・..t
(方式No.3)
(b)変調周波数=30Hzの場合
蓋誓仁転)
・、J/
戸-,一糸秘事ち鰍t岨
検出信号
き∋くi一一一声巨〓L‖巨むをぎ
一相半波 方 式
(方式No.2)
曜査読引☆ラ
検出信号
三相半波方式
ざ凋鞭軸牒一;鞘
章
ヽ1
・ご■!,l-一戸こ亡
-・こ.ニー二
∼
与
(方式No.3)
(c)変調周波数=35Hzの場合
i旨諒こ丁蒜蒜㌻箭㌫蒜芯丁…叫
トふ】應」用
事管
検出信号
一相半波方式
(方式No.2)
3掴率直に毘る喝鮭敷披講培養捧膵級証東き
針iき
検出信号
三相半波方式
(方式No.3)
(d)変調周波数=45Hzの場合
[・・
主将軍艶にヱ基暁番数紋謹園異ほ輯二呼鋼線軌絨
【-・
T_Tコ千:与!-■・・・・・#
二「■Tモニ=ニ」
__
蔓
検出信号
‡
一相半波方式
(方式No.2)
旦一群-"」∴ヰ・〕ニ∫よ‰'㌦.rこ'∼
細▼正t
検出信号
三相半波方式
ユ割印厳によ為萄露敦渓通路凝癖開触拡東〉
(方式No.3)
【◆、)′′`′
(e)変調周波数=130Hzの
1
H
.〇
Z
,コ▼・つ、、・て・T---・・¶・ユーーt・,--[∩れて・ユt・,・・・・Ⅷ-・-=・【-・■-・■・-・・⊥リーJI■・1・・■--・-
二:こ:i玉■片言こ・L
宗石:亭==ご「∵:∴左■ン■■十ご七=≡Ⅳ-・丁--・・一丁・ワ
針_JL_
一札血気鉱一
検出信号
一相半波方式
(方式No.2)
検出信号
三相半波方式
乙・■こ・__._...t
l増車法に孟る喝鏡象托還瀾兼ほ膀:夢茅甫執温泉】
1ュl■p
TrT
l鞘■
き煎季藍㍍よを萄藍急建造撼屋拇周酷鑑出
桝-
(方式No.3)
1.0秒
図2.21一相半波と三相半波検出方式の比較
39
2.5.3
振動検出遅れ時間の検討
周波数検出方式として三相半波方式(一相半波方式で検出した周波数を三相で平均)を
採用すれば、130Hz程度までの軸ねじれ振動成分が検出できることが確認できた。一
相半波検出方式では等価サンプリング周波数が120Hzであることから、その理論的な
検出限界はサンプリング定理から60Hzである。しかし三相電圧に一相半波検出方式を
適用して1/6波ごとに更新していけば、等価サンプリング周波数は360Hzとなり、
理論的な検出限界は180Hzとなる。ただし高調波歪やノイズを考慮して、三相分の平
均(3サンプル値の移動平均)を取る方式を採用した。この場合には移動平均による遅れ
時間が加わるが、検出限界周波数は180Hz程度であることが、ディジタルシミュレー
ションにより確認できた。
一方、検出遅れ時間は電圧零点検出による周期計測方式の原理上、半サイクル(60Hzの
場合8.333ms)となる。三相半波方式では等価サンプt」ング周波数は360Hzとなるが、
移動平均処理を行うため、それによる遅れ時間が加わることになる。そこで三相半波検出
方式と三相全波検出方式について、瞬時値ベースの数値シミュレーションにより、検出時
間遅れを実験的に評価した。次いで軸ねじれ振動が商用周波数電圧を周波数変調するとい
う原理に基づいて、検出周波数の値や遅れ時間について考察を加えた。
(1)瞬時値ベースでの評価
瞬時値ベースの汎用過渡現象解析プログラム(EMTP)による解析結果を表2.5と図
2・22に示す。軸ねじれ振動周波数は14.7Hzと26.8Hzを想定した。周波数検出
方式は三相半波検出方式と三相全波検出方式を比較した。周波数はサンプルホールドされ
た離散的な値として検出されるため、検出値や検出遅れ時間にはバラツキが発生している。
①三相半波検出方式
周波数検出の遅れ時間は半波(約8.3ms)であり、軸ねじれ振動周波数が高くな
るほど、検出値が小さくなる。周波数26.8Hzで検出振幅が86%となる。
②三相全波検出方式(検出値の更新は半サイクル毎)
周波数検出の遅れ時間は3/4波(約12.5ms)であり、軸ねじれ振動周波数が高く
なるはど、検出値が小さくなる。周波数26.8Hzで検出振幅が65%となる。
表2.5
NO.
検出方式
軸ねじれ振動
周波数(Hz)
田
2
軸ねじれ振動周波数検出特性
周波数検出値(最大値)
一相分
三相平均
周波数検出無駄時間(ms)
一相分
三相平均
三相半波
14.7
0.97
0.95
8∼9.1
8.3
方式
26.8
0.92
0.86
7.3∼8.9
8.3
三相全波
14.7
0.90
0.89
11.9∼13.7
12.1∼13.0
方式
26二8
0.70
0.65
12.6∼13.0
11.7∼11.9
40
軸ねじれ振動周波数14.7‖z
検出周波数(三相平均)
g、j抑!
CC巧G
r
r
lY
lヰ本音女声
与/
】
〔M門d一
圭」モ
∴腔早
華ゃ綽童・率転ホ扁忘
kl
■】
'
し
L
I
llノ
蔓寄磨誓 忘去。r
喜]孟詫恵一ラÅ3
S∫
Lノ
l、
1.'・.・
J
検出周波数(一相分)
ー
・-
」
「>「
Iつ
萱「
r蒜1
1/l曳gT
紬
く
‥.1.一】
〉主
rJ
妄1誠之33
泣
琵蕊よ奮苧A岱i音速6
軸ねじれ振動信号
図2.22a
EMTPによる周波数検出方式の評価結果(NO,3三相半波検出方式)
・ケ・ヲーエ
ア、3-S
軸ねじれ振動信号
00〇.【
、」.∴仁.黒
朽〔門¢
ハ∩汽
、Jl・‥・\ノ
打車種キ昼
ち
C〔【?
≠
、∫
き
tJ
l11--1、
〓‥〕
§」
図2.22b
㌣i
〔
t、.、1.1.
l
杓-
′・t
ゝ、一・・-L
J/一一
EMTPによる周波数検出方式の評価結果(NO.3三相半波検出方式)
41
F
検出周波数(三相平均)
軸ねじれ振動周波数14.7日z
一十一圭一・/j、`-ミ
ーーヰJ之.h帰
:予∴こ
・・`-
・・・り
ニ
___L
J
′
ノ
£
忘蒜蒜丁毒品00
/∫事ア筍亨ぎ。L■J/、亨職工
二こ。二二‥1⊥
三三㌫サニ箱■
童
‡
I
I
L・け一
L欄J一久9ク
′′トヂ
図2.22c
EMTPによる周波数検出方式の評価結果(NO.4三相全波検出方式)
検出周波数(三相平均)
「
軸ねじれ振動周波数26.8日z
宅d
り東仁・㌣jJ」"
ト寛一¢
ト馬?
n竃d↑…
岬†'訂銅≠∼
∫上?叫lい
ニ
ー
■・・こ∴-
ー・
ー
ト㌔`ト仁も =≒ =
産壷嘉妾車、軒軒
摘一審卑韓中
をi
図2.22d
J
l
ー∴・・lご
一ニ
∫
EMTPによる周波数検出方式の評価結果(NO.4三相全波検出方式)
42
(2)考察
母線電圧の周波数に含まれる軸ねじれ振動成分を電圧零点検出による周波数検出方
式がどの程度正確に検出するかを検討する。軸ねじれ振動周波数により変調された母線
電圧〃「りは(2.9)式で表すことができる。軸ねじれ振動(変調信号)の変化量を
位相変化に換算して、Sinのargumentにする必要がある【2-8】。
(2・9)
び砂=血〃♭。r…mJ榊′用)
ここで
月:搬送波振幅、dノC:搬送角周波数、♂β:初期位相
化された変調信号
∫用:最大値が正規
〟m:最大角周波数偏移
例えば、搬送周波数を60Hz、振幅を1.0とし、変調波の周波数をfM(Hz)、振
幅を1.0とすると
.、-(/)こ.、イ〟ピ.丁・/■v・/ノ
(2.10)
び砂=血(2方仙+2打J拍はり
周期計測法により検出される復調周波数の振幅の理論値は(2.11)式によった。60
Hzの場合、一相全波方式のA
tは16.7ms、一相半波方式のA
tは8.33msと
なる。
(2・11)
4㌦肌血=去_貪cosか仁め
図2.23からわかるように検出周波数は』J秒間の平均周波数となり、変調波形をサン
プルホールドした波形となる。検出される周波数はサンプルタイミングによりバラツキが
生じる。周波数検出遅れは』Jとなる。
図2.23
検出周波数の理論値(変調信号15Hz,一相全波周波数検出方式の例)
43
搬送波の周波数を60Hz、振幅を1.0と固定して軸ねじれ振動の周波数を変化させた場
合の検出周波数(復調信号)の理論値を計算し、さらに解析プログラム(EMTP)での
解析を行った。結果を表2.6a∼bに示す。
周期計測法では周波数を計測するのに1周期を要する。即ち変調周波数を瞬時に検出し
ないで、1周期を平均して計測することになる。従って、入力される変調周波数の最大、
最小周波数は平均化して検出され、入力信号のピーク値にならない。
表2.6a
一相全波方式の場合の復調信号
変調信号(軸ねじれ振動)
』′(Hz)の振幅
復調信号(検出周波数)
周波数ん用z)
振幅
理論値
周波数ん(Hz)
解析結果
1.0
5.0
0.9886
0.99
5.0
1.0
10.0
0.9549
0.96
10.0
1.0
14.7
0.9041
0.90
14.7
皿
15.0
0.9003
0.90
15.0
1.0
26.8
0.7027
0.70
26.8
1.0
30.0
0.6366
0.64
30.0
1.0
50.0
0.1910
0.095∼0.20
59.9
(ハーラツキあり) (検出限界超過
のため誤差大)
表2.6b
変調信号
』/(Hz)の振幅
一相半波方式の場合の復調信号
復調信号
周波数ん(Hz)
振幅
理論値
周波数ムす用z)
解析結果
皿
5.0
0.9971
5.0
1.0
10.0
0.9886
10.0
1.0
14.7
0.9755
1.0
15.0
0.9745
皿
26.8
0.9200
1.0
30.0
0.9003
30.0
1.0
35.0
0.8658
35.0
1.0
45.0
0.7842
45.0
44
0.97
14.7
15.0
0.92
26.8
2.5.4
振動検出点の検討
系統内の母線電圧波形がどのように観測されるかを考えてみる。図2.24(a)は発電
機が交流無限大系統に接続される場合で、このケースでは左発電機の軸ねじれ振動現象に
とゆらいでも、無限大母線端では周波数変
より、発電機内部誘起電圧周波数が60±1Hz
動は零であり、周波数は60Hzである。従って、送電系統内の各地点における周波数は発
電機内部と無限大母線との間の電気的位置(送電線リアクタンス距離)により定まり、図
2.24(a)の地点Pにおける周波数は60±1・∂Ⅲzとなる。ただし、∂=弟∫/_方由
ズ加工耳卵はそれぞれ無限大母線からP点、P点から発電機内部誘起電圧点までのリアクタ
ンスである。
一方、図2.24(b)は発電機が送電線を介して直流変換器に接続される場合で、この
ケースでは同図(a)のように無限大母線のような電圧位相を固定する作用が無いため、発電
機の内部誘起電圧周波数が外部の電圧周波数として現れる。例えば、直流変換器が一定点
弧角αで理想的に動作する場合は、無負荷時の状況と同様になるので、周波数は内部誘起
電圧周波数に一致するが、変換器が一定αで理想的に動作しない場合は、若干異なってく
る。
図2.25は上述の現象を橘湾火力タンデム型発電機および紀伊水道直流送電設備の定
数でシミュレーションした結果である。同図(a)は図2.24(a)に対応する結果で、∂
=0.5におけるP点での電圧周波数偏移量は内部誘起電圧周波数の偏移量の約1/2と
なっていることが分かる。また、同図(b)は図2.24(b)に対応する結果である。この
場合は、系統電圧周波数偏移量は内部誘起電圧周波数変異量とはぼ同程度になっている。
軸ねじれ抑制が必要とされる直流単独系統の場合に、変換所母線電圧周波数には軸のね
じれ振動周波数とほぼ同じ軸ねじれ振動信号周波数成分が含まれるので、軸ねじれ振動成
分を変換所母線電圧から検出する方法は好適である。
奮艶表替轟
6C=1H∠
ズgs
P∴j∴
ズpg
闘H芸
仰
く盈∋禦箆連発の饗奮こ柑08誠V泉基寒
声,u腰∋
変換溶
撒き 遼ま連斉昭場合
図2.24
∈用80MV良基準
p丑建き
軸ねじれ振動と母線周波数検討系統
-45-
図2.25
2.5.5
軸ねじれ振動検出点シミュレーション(a=0.5の場合)
振動検出方式の検証
開発した軸ねじれ検出方式の構成を図2.26に示す。三相半波検出方式を採用して
いる。母線電圧信号をA/D変換し、周期計測における電圧零点の時刻は図2.26に示
す様に電圧零点の前後の電圧値を内挿して求める。ここにサンプリング周期△√は173.
6′⊥Sである。
(1)定常波に対する検出特性
定常波に対する周波数の検出精度を測定した結果を図2.27に示す。誤差は
0.005Hz以下となっている。
(2)FM変調波に対する検出特性
図2.28は周波数変調波を入力したときの各部の波形を示すオシロの例で、変調周波
数は軸ねじれ振動周波数の1つ14.7Hzである。表2.7の試験ケースNo.4の場合
である。図2.28では14.7Hzの変調周波数で正弦波状に変調しているが、図のオシ
ロに示す変調信号は、装置の都合で変調信号sin∂の位相角♂を記録したものである。
変調周波数に対する検出特性を表2.7に示す(試験ケースNo.4,5,6の周波数は
軸の主要なねじれ固有周波数)。表2.7から分かるように、変調周波数は極めて高精度に
検出されている。一方、周波数偏移の検出量は入力信号の偏移量より小さ目の値となって
いる。この理由は周波数計測に周期計測法を採用しているためで、周波数をある周期で計
測する場合、その期間の平均周波数を計測することになり、原理的に周波数変調波の最大
-46-
偏移周波数より小さい値となる。この差は変調周期と計測期間に依存して決まり、変調周
期に対して計測期間が短くなる程差は小さくなる。
以上に示した軸ねじれ検出センサをSSDCに用いる場合、ねじれ周波数を正確に検出
できるが、検出遅れ時間が存在するためSSDC制御系の位相特性の設計には、位相補償
を考慮した設計が必要となる。一方軸ねじれ振動周波数偏移量の検出値が低くなる点に関
しては、SSDC制御系のゲイン設定にて対応できる。
濁耗計測二て邑
'丁‖
秦▼■ ▼■'
ヰ沫欄卜針討軌靭鮒畿T・:「エペ
‡
璽
ヰや
。1局..一J
'
▼
「___
■■
;
仁一_______「∵‥】
_
畠≡;膏よ:芋コ輿ず臓邦(-3,冒芸亡き
こ■芸
▼
-\\
}管⊇≡
、=p・丁--⊥・、・1ミ
1■l-・:\!
宇-
図2.26
軸ねじれ検出センサブロック図
B[[頭重麺画
;±二
図2.27
定常波に対する検出特性
.●●■■■t■■l乙i-■メモナ†■チ●-ナ■■_■
I■■・●■i-事±,,!‥=!-`一き
ニ::【て:…・妄二三狙三;:諾…宣i;
き:;た,r三宣三
▲■■
笹㌍
■
tl■■●■■i■t■.:●芦亡
-i:霊:r:::ミ!亡i;.;::::
▲ll司-■●■→lI-ナ●・モt▲・■11↓
`て■r■▼一-■■石■■亨ナγ●■・ヨ⊃i
●●1Tl▼■-■′ttl
■‡
薫望茎葉二幸惑
…妻=…≡焉至妻宣夢
呈:三二三;:;:;
さ;一芸i;ニ=:㌻
一t■▼ウ●ナII-…i■=t●-●!亡
き丁▲丁ホ■111ぐ●fこ
:-■三tll■つ・事■・
=▲t■:-〉--華酬■
図2.28
FM変調波形計測試験オシロ
ー47-
表2.7
周波数変調波周波数検出特性
東ゴーミ、主
■:、
.■・.■しっ■
..ノ■■、
拳蟹数儀移
真宗周嚢数
周渡監変熱雷褒詞馬渡数
趣き
義塾
」OG亡
童.諸
亘∴錮尋・
訪1∼昏
._紺:棚二丈搬とこ式;血____
亀.警察寮
帽。昏
…乱撃6鱒
Jも苫
・ぎ:¥食
ザ酬〉モ肌
'…■■‖
や、書善臣 ≡章票 ㌣ヨ
2.5.6
周波数検出遅れを考慮した制御系の設計
以上の検討結果より軸ねじれ振動周波数成分の検出には遅れ時間が発生することがわ
かった。そこでこの検出遅れ時間を考慮した軸ねじれ振動抑制制御系の設計方法について
検討した。
三相半波検出方式と三相全波検出方式それぞれについて、周波数検出器のモデリングを
行い、等価伝達関数の検討を行った。検討の結果、軸ねじれ振動周波数が30Hz程度ま
でなら、三相半波検出方式の場合位相補償により制御系の構築は可能であるという結論に
達した。三相全波検出方式の場合には、軸ねじれ振動周波数が30日z程度になると
位相補償が困難となり、ロバスト性を考えると検出方式としては採用不可と結論付けた。
(1)周波数検出方式の等価伝達関数
検討結果から三相半波検出方式と三相全波検出方式それぞれの等価伝達関数は図2.
29となる。周波数検出器単体のボード線図を図2.30に示す。三相半波検出方式と三
相全波検出方式の検出特性はそれぞれ8.33msと12.5msの無駄時間遅れとなる。
l≡二子
、
(a)三相半波検出方式
図2.29
(b)三相全波検出方式
周波数検出方式の等価伝達関数(60Hzの場合)
-48-
図2.30において実線は三相半波検出方式、破線は三相全波検出方式の特性を示す。
軸ねじれ振動周波数が30日z程度になると、三相半波検出方式での検出遅れを電気角で
表現すると900
となる。また三相全波検出方式での検出遅れは1350
となる。
図2.29では検出遅れを無駄時間で表現したが、三相半波検出方式の周波数検出遅れ
を一次遅れの伝達関数で近似した結果を図2.31に示す。またその近似伝達関数の周波
数特性を図2.32に示す。詳細および簡略近似伝達関数の30Ezにおける検出遅れ電気
角が一致するよう簡略近似伝達関数の時定数を選定した。簡略近似伝達関数は一次遅れ一
段のみであるため、軸ねじれ振動周波数領域(5∼30Hz)でゲインが低下してしまう。
制御系設計において詳細な検討を行う場合は、詳細伝達関数を用いる必要がある。
周波数検出ゲイン特性
1.2
モ0・8
ト0.6
】】
斐0.4
0.2
0
10
軸ねじれ振動周波数(Hz)
周波数検出遅れ特性
三相半波検出方式
0
(世)鱒嘔伊よ埋芝由虫垂
【
6
0
l20
1
80
2 40
軸ねじれ振動周波数(Hヱ)
図2.30
周波数検出器単体の周波数特性
二二_三ヤー
(a)詳細伝達関数
(a)簡略近似伝達関数
図2.31周波数検出方式の近似伝達関数(三相半波検出方式、60Hzの場合)
-49-
周波数検出ゲイン特性
10
軸ねじれ振動周波数(Hz)
30日zにおける位相特性を一
周波数検出位相特性
致させた。
0
60
(堪)玉蝉皿特車
120
・18 0
24 0
検出周波数(Hz)
図2.32
周波数検出器近似伝達関数の特性
(2)周波数検出器の遅れを考慮した軸ねじれ振動抑制制御系の設計
周波数検出器の検出遅れ時間を考慮して、周波数応答法により軸ねじれ振動抑制制御
ブロックを設計した例を示す。クロスコンパウンド型発電機を選定し、制御対象とする軸
ねじれ振動周波数を15Hz付近だけでなく、30Hz付近でも抑制効果を持たせようと
した場合である。軸ねじれ振動周波数が30Hz付近になると、周波数検出遅れが900
程度になるため、抑制制御ブロックで900進み位相補償を行う必要がある。
周波数応答法で用いた系統構成を図2.33に示す。まず発電機と直流系とを切り離し
て考える。直流系に角速度〟。として正弦波状の微小ゆらぎを与えた時の電気トルク変化
』reを求め、両信号の同相成分の振幅比として電気ダンピングトルク係数を求める方法
を採用している。実際には直流系と発電機の間には相互作用が存在するが、発電機は静止
していると仮定し、直流系の応答のみに着目している。検討において周波数検出の遅れ時
間を模擬した。
設計した抑制制御のブロック図を(2.12)式に示す。図2.34は(2.12)式で
表されたブロックの周波数-ゲイン特性と周波数一位相特性をそれぞれ表している。
-50-
6000∫
-2.4
ダ(∫)=∫2+464∫+210251+0・1∫
∫2+10∫+22740
(2.12)
∫2+101∫+22740
S S
DC
周波数特性算出ブロック図
図2.33
SSDC
50
n
川
イ「
0
30
20
-1
0
(コP)∴ヽも
0
10 0
旧
一2 0
一3 0
一4 0
一5 0
一6 0
一
0000000000【U
7531q)7531975311357q)
222211▲l
(諾p)芝望
l
l
E
【
】
l
l
帽
l
【
l】 \
」
音司
l
【
l
l
\J
位ネ
柑円
億
【
l
l
√ヽ
O
O
O
O
l
‡
l
J
n
O∧U
一一-一一
l
l
O
O
図2.34
抑制制御ブロックの周波数特性
-51-
図2.35は設計した抑制制御ブロックによる電気ダンピングトルク係数の変化を表す。
破線は抑制制御なしの場合で、実線は抑制制御ありの場合の電気ダンピングトルク係数を
表す。抑制制御により周波数14∼50Hzの領域において、電気ダンピングトルク係数
が正方向に移動していることがわかる。27.3Hzはクロスコンパウンド機プライマリ機
*の第1モード軸ねじれ固有振動数を表している。50.OHzは第2モードである。同図
中NLは発電機無負荷時機械ダンピング、FLは発電機フル出力時機械ダンピングを示す。
電気的ダンピング係数との比較のため、機械ダンピングは負の値にしてプロットしている。
*:一つのプラントでタービン一発電機軸系が2軸あるものをクロスコンパウンド機と
呼んでいる。2軸のうち一方をプライマリ機もう一方をセカンダリ機と呼んでいる。
一般にプライマリ機のはうがセカンダリ機に比べて慣性定数が小さい。
抑制制御なし
ダンピングト
ル
ク
係
数
(p.u.トルク
/p.u.速度)
周波数(Hz)
図2.35
抑制制御ブロックによる電気ダンピング係数の変化
-52-
2.6
実系統モデルに対する軸ねじれ振動解析結果
紀伊水道直流送電設備は橘湾石炭火力の発生電力の大部分を関西に向けて送電する設備
である。このため火力と直流送電が単独系統となっても送電できることが求められた。そ
こでこれまで述べてきた軸ねじれ振動発生可能性の評価手法や軸ねじれ振動抑制制御系設
計手法を紀伊水道直流送電設備の実機モデルに適用し、有効性を実際面から検討する。
まずユニット相互作用係数(UIF)により、軸ねじれ振動が発生する可能性のある交
流系統の条件を明らかにした。発電機と並列に接続される交流系統の短絡容量が小さいほ
ど軸ねじれ振動が発生する可能性が高いことも明らかとなった。つぎに周波数応答法によ
る検討を行い、クロスコンパウンド機よりもタンデム機のほうが軸ねじれ振動の発生する
可能性が高いことがわかった。最後に時間領域数値シミュレーションとシミュレータ試験
を実施し、軸ねじれ振動発生の有無を確認し、さらに軸ねじれ振動抑制制御の有効性を検
証した。
以上よりユニット相互作用係数による評価は軸ねじれ振動現象発生有無判別のために有
効な手法であると言える。さらに電気ダンピング係数による評価手法が軸ねじれ振動抑制
制御系設計のために有効であることを確認できた。
2.6.1
ユニット相互作用係数による評価【2
9]
(1)解析条件
図2.36に検討に使用した系統構成を示す。検討対象の発電所における発電機はタン
デム機1ユニット(Gl)とクロスコンパウンド機2ユニット(G2,G3)とした。発
電機と並列に交流系統を接続している。この交流系統の短絡容量を変化させて、SSR現
象の発生限界を検討した。図2.36において送電線Aまたは送電線B、Cを開放するこ
とにより、並列交流系統の短絡容量を変化させた。すなわち送電線が全て健全であれば交
流系統の短絡容量は最大であり、送電線Aが開放されると短絡容量は最小となる。
発
図2.36
電
所
ユニット相互作用係数評価対象系統
ー53-
(2)解析結果
解析結果を表2.8に示す。
(a)タンデム機一台運転の場合
送電線の開放に対してUIFが0.1を超過しており、軸ねじれ振動が発生する可能
性がある。特に送電線Aが開放されると、UIFが0.897となり軸ねじれ振動が発
生する。
(b)クロスコンパウンド機一台運転の場合
送電線A,Bの開放に対してUIFが0.1を超過しており、軸ねじれ振動が発生す
る可能性がある。特に送電線Aが開放されると、UIFが0.314となり軸ねじれ振
動発生の可能性を検討する必要がある。
(c)タンデム機一台†クロスコンパウンド機一台運転の場合
(Dタンデム機
送電線A,B、Cの開放に対してUIFが0.1を超過しており、軸ねじれ振動が発
生する可能性がある。特に送電線Aが開放されると、UIFが0.293となり軸ねじ
れ振動発生の可能性を検討する必要がある。
②クロスコンパウンド機
送電線Aの開放に対してUIFが0.156であり、軸ねじれ振動が発生する可能性
がある。
表2.8
UIF解析結果
発生の有無()内は口IF値
直流運転
運転発電機
発電機
電力
700
対象
タンデム機
送電線運用条件
送電線C開放
送電線B開放
送電線A開放
Gl
:・■く}'■
クロスコンパウン
1000
ド機
G2
■■
無し
(Pri)
G2
(Sec)
(0.077)
呑・
衰
無し
無し
無し
(0.018)
(0.025)
(0.071)
Gl
E
1400
タンデム機+クロ
スコンパウンド機
G2
(Pri)
G2
(Sec)
54
草書…
杢
無し
無し
(0.061)
(0.079)
無し
無し
無し
(0.014)
(0.018)
(0.035)
監
田
2.6.2
周波数応答法による検討[2Ⅵ7j
(1)解析条件
1400MW直流送電系統とタンデム機およびクロスコンパウンド機によりなる近接
の火力発電所との相互作用を解析した例を示す0解析系統の構成の概要を図2.37に、
軸系の構成とねじれ振動特性を図2・38に示す0軸ねじれ共振は直流系統と並列される
交流系統の強さにより大きな影響を受けるので、表2・9に示すような火力発電機の並列
状態、線路の運用状態、直流電力などの各運用条件について検討した。
図2.37
電気ダンピングトルク解析対象系統
=÷=十==三ニ÷ニー
妄a;タンデム捧げニl・i.乱雲甘鳥∴鍋」,47.5鉦幻
G毘邦
プラケアぜ靡
けニ3・仁3.4二!,gH三)
聖.キンダヴ鱒
慧藁紅
■,,・・J・-
ミ/=9.3.川.6‖ム
l
、…b.:・アロエコンパウント構
図2.38
表2.9
発電機
タンデム機
700MW(1台)
クロス機
1050MW(1台)
軸系の構成とねじれ振動特性
軸系の構成とねじれ振動特性
系統条件
直流電力
平常系統
1400MW
A送電線ルート停止
700MW
平常系統
1400MW
A送電線ルート停止
1050MW
55
(2)解析結果
周波数応答法を用いて電気的ダンピングトルクと軸系の機械的ダンピングトルクβ爪を
比較する手法で解析を行った。その結果を図2.39に示す(図中、NL、FLはそれぞれ
無負荷時、全負荷時のβ皿を負方向に示したものである。実線はタンデム機(14.8Hz,
24.5Hz,29.1Hz)の、破線はクロスコンパウンド機のプライマリ機(24.3H
Z,43.9Hz)の範囲を示す。セカンダリ機(9.3Hz,16.6Hz)の範囲は省略
している0
図2・39においては実線はタンデム機700MW
l台運転時のβeを示
す。交流系統が健全な場合に比較して、A送電線ルート停止の場合は∂eが大きく負側に移
るため軸振動の一次モードで共振の可能性を示している。
また破線はクロスコンパウンド機1050MWl台運転のときのプライマリ機のβe
を示す。すべての周波数でβe>β皿となり、軸ねじれ共振は発生しないと予想される。ク
ロスコンパウンド機では軸系のねじれ固有振動数が異なるプライマリ機とセカンダリ機が
常に並列されるため、互いにダンピング効果を生じている(互いに交流系統が並列されて
いる状態となる)ので共振が発生しないと考えられる。
惑溺馬首志そ屋〓慧冨主ょや予ぞご嘉顛
濁藍畏
図2.39
服z∋・
ダンピングトルクの解析結果
56
時間領域数値シミュレーション、シミュレータ試験による検証【2一川ト[2-12】
2.6.3
(1)解析条件
(a)シミュレータモデル
アナログ式のシミュレータでは回路損失が大きい等の問題があった。そこで全ディ
ジタルタイプの電力系統シミュレータ(RTDS)にて主回路モデルを構成した。直
流回路は双極構成とし、変換用トランス、サイリスタバルブ、直流ケーブルを詳細に
摸擬している。交流系統は3つの縮約系統で構成している。発電機はPa
r
kモデル
をディジタル演算で模擬しており、AVR、PSS、ガバナも詳細に模擬した。また
タービン発電機軸系についてクロスコンパウンド機のプライマリ(P
リ(Se
ri)、セカンダ
c)側をそれぞれ3質点、タンデム機を4質点で模擬した。制御装置は変換
器制御部、発電機協調制御部、SSR抑制制御部から構成されており、図2.40に示
すように電力系統シミュレータ(RTDS)と信号ケーブルで接続している。直流変換
所の母線電圧をRTDSからアナログ信号によりSSR抑制制御部に入力し、サイリ
スタバルブの制御角αの変更指令を変換器制御部からパルス信号にしてRTDSに出
力している。
図2.40
電力系統シミュレータ(RTDS)と制御装置の接続
(b)試験系統
図2.41にシミュレータ試験に使用した系統構成を示す。検討対象の発電機はタン
デム機とクロスコンパウンド機とした。交流系統を模擬するため、変換所の調相容量を
変化させた場合のf-Z特性が周波数で300Hz付近まで試験系統と合うように調整し
ている。送電線Aが開放され、タンデム型発電機単独となった場合の変換所から見た′
57
ーーZ特性を図2.42(a)に示す。また変換所から交流系統2を見た特性のうち、送
電線が一回線開放されて2次の反共振のインピーダンスが大きくなる例を図2.42
(b)(c)に示す。表2.10∼12にタービン一発電機の固有振動数と軸系の形状を
示す。
発
電
図2.41
シミュレータ試験対象系統
8純忠
柑開王
卵坤¢
朝鳩葺
■、送電線
■■
■■
■l
訳抱腹
鋸受渡義援望匪
職
鵬
O
h
柵
q■
瑚
6台)
叫
送電線
触
ぞ白きタンデ烏撃発電棲
単独宅5∈¢台き
相国銀河放
.
ヽ■ニー■
軋成霊ごご
}
、・{1∧
■′Y:、く、∼
i
〉ノ
一
慧繭舶
宅じき愛護系統慧楳互恵)
図2.42
変換所から見た′-Z特性
58
表2.10
タンデム型発電機固有振動数
タンデム機
ターゼン一発電機
固有振動数(Hz)
HIP
表2.11
ぺ=14・8、ム=24■5、ろ=29.1
ALP
BLP
GEN
クロスコンげウンド型(プライマリ)発電機固有振動数
タービン発電機
クロスコンげウンド型(プライマリ)
固有振動数(Hz)
1=24・3、ろ=43.9
タービン一発電機
クロスコンげウンド型(セカンダリ)
固有振動数伯z)
ぺ=9,3、ろ=16.6
GEN
(2)解析結果
直流運転電力、運転発電機、送電線運用条件を変えた時のSSR発生有無とUIF
の値を表2.13に示す。クロスコンパウンド機の場合一つのボイラに対して、ター
ビン・発電機が二つあるため、プライマリ側、セカンダリ側それぞれについてUIF
を計算した。タンデム機において、以下の3つの条件でSSR現象が発生した。本結
果は電気ダンピングおよびEMTP解析の結果と一致している。
(a)タンデム機のみ運転で送電線Aが開放された場合
(b)タンデム機のみ運転で送電線Bが開放された場合
(c)タンデム機+クロスコンパウンド機運転で送電線Aが開放された場合
表2.13に示す結果について以下の結論が得られた。
(a)タンデム機ではUIFの値が0.224を超えるとSSRが発生した。直流の運
59
転電力により発生限界に差が見られる。これは直流の制御角の違いによる応答の
差によると考えられる。
(b)クロスコンパウンド機のプライマリ側はUIFが0.3を超えてもSSRは発
生していないが、限界に近いと考えられさらに詳細に検討が必要である。セカン
ダリ側はUIFが0.1を超えることはないため、SSR発生の可能性は低いと
いえる。
表2.13
シミュレータ試験結果
発生の有無()内は口IF値
直流運転
運転発電機
対象
発電機
電力
700
タンデム機
Gl
送電線運用条件
送電線C開放
送電線B開放
送電線A開放
無し(図3)
(0.144)
クロスコンパウン
1000
ド機
G2
(Pri)
G2
(Sec)
Gl
1400
タンデム機+クロ
スコンパウンド機
G2
(Pri)
G2
(Sec)
無し
無し
無し
(0.077)
(0.112)
(0.314)
無し
無し
無し
(0.018)
(0.025)
(0.071)
無し
無し
(0.114)
(0.149)
無し
無し
無し
(0.061)
(0.079)
(0.156)
無し
無し
無し
(0.014)
(0.018)
(0.035)
(3)解析波形例
シミュレータ試験の波形例を図2.43∼44に示す。試験条件は以下である。
(a)系統条件
①発電機
:タンデム機一台運転
②直流電力
:1400MW
③並列交流系統事前流出潮流:760MW
(b)事故条件
直流変換所至近端で6LG-0事故が発生後、送電線Aがルート遮断し、タン
デム機が単独運転となるものとした。
シミュレータ試験結果とEMTP解析結果を比較評価し、次の点を検証できた。
(a)交流系統1側でのルート遮断故障後、直流変換所母線周波数の振幅値から抑
60
制制御を起動する起動判定部、SSR抑制制御ソフトスタート回路は正規に動作
した。
(b)発電機角速度はルート断故障直後、1Hz程度まで上昇するが、SSR抑制制御、
直流EPPS制御、直流EFC制御により、発電機は安定に単独系統においても
運転することができた。
図2・43
図2.44
タンデム機単独系統移行試験結果(SSR抑制制御なし)
タンデム機単独系統移行試験結果(SSR抑制制御あり)
61
2.7
実プラントにおける試験侶3]
2000年1月より5月まで実系統を用いた系統連系試験を行い、その試験の一つとし
て発電機・直流単独系統試験が実施された。発電機・直流単独系統とは、南阿波幹線(図
2.45中の阿波変電所一阿南変換所間を結ぶ送電線)のルート断により、橘湾火力機のみ
が直流連系設備と接続されている系統を指す。
発電機・直流単独系統移行時の各機能の動作を実系統において検証した結果、単独移行
EPPS機能により安定に単独系統へ移行できること、移行後の周波数がEFC機能によ
り60.OHzに維持されることを確認した。また、図2.46に示すようにSSDCの
効果によりタービン軸の軸ねじれ振動が安定化することを確認できた。
図2.45
関連電力系統図
62
0.00015‥
-
-・
-▼1・トン・■
、.…軸共振周疎款節lモー;、∵(9..1¢口早)
■
・・.._・
▼・・-・・-・・--■■
ト…‥1
二■■`-
・・・
-・--∴∴∵・■・一・■・■・:′・
】
・▲▲▲--「.・・・・・・■∪.-■_■一一】一一・】
ナ‥・■・ニノーー・-一-=ニーー】・
_
▲・..-__,_止■
邑0.恥000
幸三三三車重
1L__J
慮患家立専㌣由
-0・抑0‡5一‥ま二÷ニf叩二;二二ご二二こ」1ニ:;∴ニノ宗∵ま二言二言完二三∴二三
軸共振周波数第2トド(15.56Hz)
0.¢001
0.00000-■
-0,00015-.
l
l
l
●
l
●
●
tl
R
lt
lJ
ll
ll
M
l†
Il
■
10秒
■
時間(秒)
図2.46
単独系統移行直後のタービン軸ねじれ振動
結言
2.8
直流送電設備近傍の発電機における軸ねじれ振動安定性の評価と軸ねじれ振動抑制制
御方式、軸ねじれ振動検出センサについて検討し以下の結果を得た。
(1)ユニット相互作用係数(UIF)と電気ダンピング係数による評価手法が軸ねじれ振
動現象発生有無判別のために有効な手法であることが確認できた。発電機と並列に接
続される交流系統の短絡容量が小さいほど軸ねじれ振動が発生する可能性が高いこ
とを明らかにした。
(2)クロスコンパウンド機は軸ねじれ振動特性の異なる2台の発電機が並列運転される
ため、軸ねじれ共振が発生しにくいことが明らかとなった。
(3)
軸ねじれ振動抑制装置(SSDC)として2方式を取り上げ、その比較検討を行い、
直流変換所母線電圧の』′を入力とし、制御角補正信号を付加する方式が直流系の
応答性を損なうことなく良好な抑制効果を得られることを明らかにした。
(4)起動方式、監視・警報手段を含めた軸ねじれ振動抑制制御システムを構築し、実シ
ステムに適用した。
(5)直流送電系と発電機の軸ねじれ相互作用を抑制する制御装置のために、軸ねじれ信
号検出用周波数センサについて検討した。軸ねじれ信号検出用センサとして、変換所
交流母線電圧の周波数検出方式を採用した場合、計画している直流送電システムで有
効な軸ねじれ抑制効果を得ることの出来る周波数センサの仕様を理論的考察および
シミュレーション検討から決定した。さらに、上記仕様に基づく周波数センサを開発
し、単体の特性が仕様を満たすことならびにシミュレータを用いた総合試験により、
開発した周波数センサが軸ねじれ振動抑制制御に有効であることを確認した。
(6)軸ねじれ振動抑制制御装置を試作し電力系統シミュレータを使用して、総合試験を実
施し、軸ねじれ振動抑制制御効果を検証した。
63
(7)実系統を用いた系統連系試験を行い、SSDCの効果によりタービン軸の軸ねじれ振
動が安定化することを実際面から確認した。
2.9
参考文献
【2-1]M.Bahrman,E・VLarsen,R・J・Piwko,H・S・Patel:'一ExperiencewithHVDC-Tuebine-Generator
TbrsionalInteractionatSquareButte.r,IEEE,Ⅵ)1・PAS-99・No.3,May〝un,PP966-975(1980).
R・J・Piwko,E・V・Larsen:一■HVDC
【2-2]
System
Controlfbr
Damplng
Subsyncyronous
Of
Osci11ations",EPRIEL-2708,RP1245-1FinalReport(1982.10).
【2-3】堀内進、原築志、小西博雄、天野比佐雄:「発電機と直流送電系統の干渉による低周波
軸ねじれ振動現象の解明と抑制方式の開発」、電学論B、108巻3号(1988).
【2-4】三嶋隆樹、守谷賀鶴雄、真鳥岩男、北村哲、天野雅彦、辻英治:「発電機軸ねじれ
動揺抑制方式の検討」電気学会電力技術研究会
【2-5]Reader'sGuideto
Subsynchronous
PE-96-34(1996.9.9).
ResonanceIEEE
ComitteeReport910SM350T9
PWRSbySubsynchronousResonanceWorkingGroupoftheSystemDynamicPerfbrmance
Subcomittee(1991).
【2-6】電気学会直流送電技術調査専門委貞会「交直連系系統の相互作用」電気学会技術報告、
第628号(1998).
【2-7]M・Sato,K・Yamqii,K・Kato,M・Sekoguchi,I・Matori,M・Goto:■一DamplngControlfbr
GeneratorTbrsionalOscillationDuetotheInteractionwithHVDC一.InternationalSessionsin
IEEJ-Power&EnergySocietyAnnualConftrence,No.1140saka(1996).
【2-8]P,M・Anderson,etal:'SubsynchronousResonanceinPowerSystems,,IEEEPRESS
【2-9】村上弘明、東正樹、関田昌弘、大森隆宏、西村正志:「直流送電における発電機軸ねじ
れ抑制制御のシミュレづ試験検証
その1一軸ねじれ振動の発生限界についての検討」:平
成9年電気学会電力・エネルギー部門大会
平成9年7月(1997).
No.291
【2-10】村上弘明、東正樹、関田昌弘、島村秀彦、世古口雅宏:「直流送電における発電機軸ね
じれ抑制制御のシミュレづ試験検証
気学会電力・エネルギー部門大会
その2一軸ねじれ抑制制御の効果検証」:平成9年電
No.292
平成9年7月(1997).
【2-11】田中誠、植原宣和、関田昌弘、島村秀彦、真鳥岩男、吉栖立格、高浜朗:「紀伊水道H
VDCにおける軸ねじれ抑制制御のシミュレータ検証」:平成10年電気学会電力・エネ
ルギー部門大会
No.280(1998).
【2-12]植原宣和、東正樹、関田昌弘、大森隆宏、西村正亭、世古口雅宏:「直流送電における
発電機軸ねじれ抑制制御の検証」:平成9年電気学会電力技術・電力系統技術合同研究
会
PE-97-162(1997).
【2-13]岡部孝継、佐藤雅一、松原伸二:「紀伊水道直流連系設備の系統連系試験における発電
機・直流単独系統試験結果」‥平成13年電気学会全国大会
[2-14】町田武彦編著‥「直流送電工学」,東京電機大学出版局(1999).
64
Noふ144(2001).
第3章
3.1
非線形状態方程式の厳密線形化手法による発電機制御
はじめに
従来から電力系統では、それ自体の非線形性に対してある運転点での線形近似の制御が
行なわれている0一方、制御理論の分野では、微分幾何学論に基づく「厳密な線形化手法」
という非線形制御理論が構築されてきた。このような状況を踏まえて、本章では対象の非
線形性及びモデル誤差に対する適応性を考慮した非線形制御システムの構成法を開発し、
実際面から検証することを目的としている。
「厳密な線形化手法」は従来の近似手法と異なり、対象のモデルに対して、状態量の非
線形写像と非線形フィードバックの適用により対象を等価的に線形系に変換する手法であ
る0
しかし、電力系統モデルを非線形な微分方程式で表現したまま、直接制御系を構築す
るという手法を採用すると、モデルを多数の状態変数で表記する必要があるという問題が
ある0またモデルパラメータ変動等のモデル誤差に対するロバスト性にも問題がある【3-1】。
この厳密線形化手法の電力分野への適用例が既にいくつか発表されている。例えば発電
機制御系設計では、ガバナ制御への適用例がQing【3-2jらによって、励磁制御系への適用例で
は、M・_D・Ilic【3{3]・【3
4】らが界磁電圧をフィードバック信号に用いた(♂≠〟)入力型PSSの設
計を行い、多機系系統モデルで検証を行っている。
また発電機端子電圧の影響までを考慮した電力動揺方程式の近似式を求め、そのシステ
ムから厳密線形化を行ない、非線形PSSの設計を試みた例[3-5]がある。南部らは発電機の
運動方程式と電圧方程式から1機無限大系統を対象システムとした厳密線形化の適用を試
みている。【3
6】この厳密線形化の適用には、制御すべき変数に発電機の相差角∂が入るこ
とが避けられないため、この♂を精度良く同定することが重要となっている。また多機系
統への適用にあたっては系統構成の変化をどのようにして判断し、その情報を制御系に伝
えるかが実機適用に際し重要なポイントとなる。
参考文献【3-7]では、厳密線形化手法を用いた励磁制御系の多機系統への実用的な適用を
考慮したうえで、発電所の主変圧器の2次側母線の情報を入力信号として取り込むことに
より、この母線の通過潮流の変化、電圧の動きから系統側の擾乱を察知し、発電機の相差
角∂を間接的に制御できる手法を提案している。
本章では発電機励磁系、ガバナ制御装置を含む中間負荷付きの一機無限大母線系統モデ
ルに対し、厳密線形化法を用いてローカル設置の発電機制御装置を設計した。さらに電力
系続の状態変化に追従するために、発電機自端での端子電圧、電流のみから系統の状態を
推定し、厳密線形化のためのゲインを適応的に変化させる方式を採用した。具体的には、
電力系統の状態変化というパラメータ変動を発電機から系統を見た時の等価的な電圧、イ
ンピーダンス変化により検出して、その結果を厳密線形化のためのフィードバックゲイン
65
に反映させている。
厳密線形化手法を適用した発電機制御装置を設計し、デジタル演算処理型非線形制御装
置を試作した。発電機の運用状態が非線形な領域になる場合を想定し、ディジタルシミュ
レーション及びシミュレータ試験により本制御装置の安定度向上効果を検証している。ま
た、従来の(』タ≠』〟)入力型のPSSの効果と非線形制御装置の効果を定量的に比較し
考察を加えている。
電気事業の自由化が進展した場合には、スケジュール値と実際の運用値のずれや異なる
発電事業者間の予期しがたい運用により限界状態に近い電力潮流の発生や運用上の制約が
生じる可能性がある。発電機が系統の非線形特性が強く出てくる領域で運用せざるを得な
くなるため、非線形制御により安定限界潮流を増加させることが期待できる。
本章ではまず非線形システム論の概要を述べ、発電機励磁系、ガバナ系を含む電力系統
での安定化制御設計方法から、ディジタルシミュレーション及びシミュレータ試験による
検証結果までを述べる。
66
非線形システム論【用
3.2
3.2.1
従来の線形化手法
動特性が次式の状態方程式で表わされる非線形システムを考える。
;=仲)+g(ゆ
(3.1)
ただし、ズは状態変数ベクトル、〃は入力変数ベクトル、′←)、g(坤まベクトル場
ある0また、一般性を失うことなく、原点が平衡点であり′(0)=0とする。
従来の線形化手法は非線形状態方程式(3.1)の右辺を平衡点まわりでテーラー展開
する事で、以下のように一次近似するものである。
;=鮎+紳)町02(叫
(3.2)
=血+助+02(ズ,〟)≒血+動
この線形化はほとんどの状態方程式に適用できるため良く用いられているが、一般に
精度はあまりよくない0また、平衡点から大きく離れた場合に制御できなくなる場合も
ある0そのために、非線形状態方程式(3・1)をより広範囲で、より高精度な線形化を
行う事が厳密線形化による非線形制御の考え方である。
コントローラーの設計はこの近似線形化された状態方程式に対して線形制御理論を用
いて行えばよい。例えば状態フィードバックを用いるならば
〟=ダ・g
(3.3)
となり、コントローラは線形である。この制御系の様子を図3.1に示す。
この線形化はイメージ的には図3.2に示すように元の曲線(非線形システム)に対し
て原点の近くで接線を引き、この接線を近似線形化されたシステムと考えることに相当
する0この線形化は原点から離れると近似が悪くなるため原点の近くでしか有効でない
ことが多いが、手法が簡潔であり、またほとんどすべてのシステムに適用できるので広
く用いられている。
線形システムで近似
線形コントローラ
図3.1テーラー展開の一次近似線形化
図3.2
を用いた制御系
テーラー展開の一次近似線形化
のイメージ
67
3.2.2
厳密線形化手法[=]〔3
9j
厳密線形化の方法として(3.1)式で表わされた非線形システムを座標変換とフィード
バックで厳密に線形化することを考える。すなわち(3.4),(3.5)式に示す、新しい
出力Zと新しい入力Ⅴを考える。
ねソ
Z=¢
(3.4)
(3.5)
〟=y/β(ズトα(J)/β(ズ)
状態方程式(3・1)がフロペニウスの定理を満足すれば、関数隼)が必ず存在する0こ
隼)を用いてシステムを線形化する座標変換とフィードバックのひとつは、
Z=叡カ=
(3.6)
y
α(ズ)
(3.7)
〟=---=エgエ1ゐ(ズ)y+上をゐ(ズ)
β(J)β(ズ)
上式のちゐ(g)は仲)に関するゐ(ズ)のリー微分で、(3・8)式で表される。
中(ズ)=塑・拍)
∂芳
(3.8)
1/β(カは入力変換ゲインであり、α(.)/β(.)はダイナミック線形化フィードバックの
ゲインである甘」=3-2】。
図3・3に非線形フィードバックと座標変換による厳密な線形化を用いた制御系を示す。
厳密に線形化されたシステムに対しては線形コントローラで制御すればよく、線形システム
に対しては、既に確立された最適制御やロバスト制御などを実現するコントローラをシステ
マテイツクに設計することが可能となる。ここでは、厳密線形化処理と線形コントローラを
総合して非線形コントローラと呼ぶ。
厳密に線形化されたシステム
l
t
l
l
l
l
I
l
l
■
■
-
■
■1-■
-
-
■
-■■-
●
-■■■■■■■■■■
■
-■■■-
■
一■■-■■-
■
■■-■■■■■■■■■
●
-■■-■
-
■-
-
-
■
-
■■■■-
■
--■■■■-
●
■-
■
-
■
-
■
■■-
■
■
●
■
図3.3
非線形コントローラ
非線形フィードバックと座標変換による厳密な線形化を用いた制御系
68
3.3
厳密線形化手法の発電機制御への適用[3朝
電力システムの状態方程式
3.3.1
一般に発電機の制御系としてAVRとガバナがあり、これらが図3.4に示すようなそれ
ぞれ一次遅れ系で表現されるものとする。また発電機は界磁回路と回転子の運動方程式から
なる3元の状態方程式で表されるモデルを考えて、先の制御系を含めるとこれらの状態方程
式は次式で表される。
∂=〟-〟。
丘)0
ゐ=肩
恒一芸(〟-〟0]
宣トg∴(gd一方れ+㌔]
㌔=一言(㌔-㌔0)+告(㌣0-り)そu′
(3.9)
た=一言+筈〔竺㌘姥+筈・ぴG
ここで、∂:回転子位相角、の:回転子角速度、g-
‥内部電圧、㌔‥界磁電圧、
㌣:発電機端子電圧、た‥発電機への機械入力トルク、
モ:発電機の電気出力トルク、
U′,UG‥それぞれAVR、ガバナヘの制御信号
嶋
図3.4
ガバナ
AVRとガバナのブロック線図
上記の関係式をn機の発電機から構成される電力系統に適用すると状態方程式は(3.10)
式で表される。
ズ=F(ズ)+G・〟
(3.10)
γ=β(ズ)
69
ここで、
ズ`=k一重け・呵一触
■㌔・㌔j㌔」
(3.11)
U。fj
〟i=担β
(3.12)
㌣≠-㌦]=軋(ズ)力2`(ズ)]
ガf=桓∫-や。f
(3.13)
雪(ズ)=佑(ズ)ん(ズ)ム(ズ)ん(ズ)ん捌
(3.14)
Gf=【glig2f]
(3.15)
ん(∬)=のf-α。
(3.16)
叫=宣二p
-モ`一芸(…]
〝〃
(3.17)
用=去トgこf-(Ⅹdf-gニfyd∫+gβf]
ん(中÷(g〝i-㌔車掌堆。f-り
㌔f\ノ"`
}■■1=\′
虎)0
(3.18)
(3.19)
d)f
用=一意+窒
(3.20)
丘)0
gヰ・鰹…]r
g2f=[…賢…]r
(3.21)
J=h
(3.23)
…1…げ
〟=ト1…
(3.22)
〟f
γ=担1… 斗
‥・可r
…
(3.24)
g〃]r
(3.25)
坤)=【雪(J)… 雪(ズ)…机珊
(3.26)
G=didg【Gl… G王・‥
(3.27)
G〃]
70
3.3.2
厳密線形化によるコントローラの設計
元の非線形システムのフィードバックによる厳密線形化のため、ノ番目発電機の出力状態
変数の相対次数をまず確認する必要がある。
ノ番目発電機の最初の出力状態変数に閲し、ん1f(ズ)=亘(り「匁‥
ェgl勧(ズ)=塾・gl上=晶王=0
(3.28)
ェg2肋(ズ)=姐・g2∫=旦-・覧=鮎≠0
2ガ∫ ㌔f
か
ここでエア力(J)=塑.顆)は棚。関するカ似のリー微分を表す。
伊
二番目の出力状態変数に対して、ゐ2i(ズ)=〔f(f)-γ。f:
∂㌣f lg。∫
エglんゐ2f(ズ)=
∂乾7£㌦
=Alf≠0
(3.29)
∂あf(ズ)g。f
エg2んゐ2f(ズ)=
=β22f=0
∂た∫㌔∫
ここで
頼)=巧f=豊美f濁ムf
また
卜 ]
l
A∵A
β∵A
det
l
一山
1
・▼■
g
(3.31)
▼⊥
g 2
・▼`
r山
九1れ`
1
た∵左
卜
det
g
.-■
ニ
(3.30)
勧埴
▼⊥
.▼-
pO
H
吼g。flg。∫∂㌦
]
≠0
2方f㌔fた王㌔f∂乾
式(3・28)t(3.29)および(3.31)から、もし∂γ′∩が満足されれば,i番目の発
≠0
∂焉
電機の二つの出力状態変数に関する非線形システム(式3.10)の次数は3と2である。出
力状態変数に関する非線形システムの次数の総和が5の倍数であるため、線形化フィード
バックの原理により、元の非線形システムは以下に示す座標変換とフィードバックにより、
◎f(ズ)=ト1f(ズ)エアゐ1f(ズ)軌(ズ)ゐ2f(殉ゐ2i(ズ)]
Z=◎(ズ)=[◎l(ズ) ◎∫(ズ)‥・◎〃(わr
得られたアフィン線形システムは次式で表される。
71
(3・33)
Z=A.Z+βル
(3.34)
ここで
トト\.∫
√り一一叫,巾Il`一一r川
Zf=
Z
Vf
り`]‡(3・35)
=LZI,Zコ,Zj,Z_l,Z5,]
Zf
Z〝]r
=Fl…
=卜1f l一
り
り
(3.36)
…
(3.37)
γ
2
y
(3.38)
…
…
=省
A
(3.39)
0
1
0
0
0
0
0
1
0
0
0
0
0
0
0
0
A.=
現β〝
4β
β
=dねg【4
=血g【旦
lJ
0
0
0
0
0
0
0
1
0
0
0
1
0
0
0
0
0
0
1
(3.40)
(3.41)
ノ番目の発電機に対して、状態方程式は次式のように書くことができる。添え字パま省略
している。
二t=こ二
三2=Z3
ち=り=α1(J)・∑動・Uノ=α1(カ+A2・U。
ノ=1
(3.42)
ヱ4=Z5
ヱ5=り=α2(わ+∑β2ノ・Uノ=α2(カ+β21・U′
ノ=1
ここで
α1(J)=一芸・γ一芸偶+芸榊)
(3.43)
(3.44)
α2(ズ)=豊臣塑ム+貰ぃ若ム
∂β
(3.45)
gG
βo
β2=面て
∂nlgd
(3.46)
β二t一二
喝雪。7二
72
式(3.43∼3.46)の誘導と計算は付録に詳細に示した。
最適制御コントローラを設計するため、多入力多出力システム(式3・34)に関して、評価
指標J(式3.47)を選定した。
J=JoIZTわZ+拍呵
(3.47)
評価指標Jを最小にするフィードバック制御入力変数γは(3.48)式により計算できる。
ド=一尺
Jβ′躇
(3.48)
ここでPは次のリカッチ方程式の非負解である。
Aや+翔+e-Pβ打甘p=0
(3.49)
重み行列e,尺を(3.50)式のように選定すると、
e=diag(500,90000,500,500,500)
(3.50)
R=diag(1,1,1,1,1)
以上より、
り=22・4∠4り
+23.3γ′
(3.51)
り =22.4』♂
+302.5』〟
+33.2』〟
最後に(3・10)式に示す元の非線形システムに対する厳密な線形化フィードバック制
御が得られる。
UG=
(り-α1(ズ))
A2
U′=
(3.52)
(り-α2(J))
β21
フィードバック厳密線形化制御は発電機とタービンの局所的な情報のみを使用しており、
他の発電機や系統の情報を使用していないことは、式の誘導からわかる。それゆえ分散型
非線形制御と呼ぶことができる。
73
3.3.3
電力系統の状態推定【3」‖
(1)多機系統のモデリング
系統の外乱により発生する発電機有効電力、無効電力や電圧変動を発電機自端のみで検
出することにより、外部系統の等価抵抗、等価リアクタンスと等価母線電圧を推定する手
法について述べる。また外部系統を基準とした発電機の内部相差角を求める。
長距離大容量送電のような場合には、電力系統を等価リアクタンスと等価母線電圧で縮
約表現し一機無限大モデルを構成して設計することができる。一方発電機と需要地の間に
中間負荷が存在する場合には、中間負荷付の一機無限大系統を想定する必要がある。
図3・5に中間負荷を有する3機系統モデルを示す。発電機G2から系統を中間負荷付の
一機無限大系統と想定すると、図3.5は図3.6のように変換することができる。定イン
ピーダンス特性の中間負荷を有する電力系統は、リアクタンス分と抵抗分を持つ送電線が
無限大母線につながるモデルに等価変換される。従って発電機から無限大母線を見た時の
送電線の抵抗分、リアクタンス分と系統母線電圧が求まればよい。
図3・6は中間負荷を有する電力系統を分散制御の対象となる発電機G2と発電機G2か
らみた外部系統とに分けて考え、外部系統をT型等価回路で表現したものである。
負荷C
十G)
Pヤ0,匂
無限大母線
[
図3.6
中間負荷付一機無限大系統
74
送電線の等価アダミッタンスy12、yl。の間に定インピーダンス特性を持つ局所負荷が
存在すると仮定し等価アドミッタンスy22として表現している。また送電線は定電圧源
Gsに接続されていると仮定する。図3・6に示したモデルにおいて次の式(3.53)が
成り立つ。
:テニニ∴∵∴二こ十i二
〉
(3.53)
(3.53)式でちを消去して整理すると、(3.54)式が得られる。
12(ち2+ち5)′,′ ち3
12+ち2+ち3\`ち2+ち3
l′1、)
わ′
(3・54)
(3・54)式より図3・6の一機一負荷無限大モデルは図3.7に示すような、一機無限
大モデルに等価変換できる。すなわち発電機G2が等価アドミッタンスを介して無限大母
線gβに接続されているモデルに変換できる。たとえば図3.7で負荷の力率を1とし、定
インピーダンス特性と仮定すると、y22は等価コンダクタンスCで表すことができる。
また送電線のコンダクタンス分を無視しサセプタンス分のみと仮定した場合でも、負荷
の大きさが大きくなると、図3.7における伝達インピーダンスの抵抗分や等価定電圧源
の電圧降下が大きくなり無視できない量になる。このため発電機から無限大母線を見た等
価送電線リアクタンス、等価母線電圧の他に等価送電線抵抗を推定する必要がある。
無限大母線
的=汚3W汚2+汚可
図3.7
等価一機無限大系統モデル1
月e+j鬼e
無限大母線
図3.8
等価一機無限大系統モデル2
75
これらの電力系統のパラメータを推定する方法を以下に述べる。図3.8は図3.7をイ
ンピーダンス表現に書きなおしたもので、発電機G2が等価抵抗と等価リアクタンスを介し
て無限大母線gβに接続された回路を示している。
発電機G2の有効電力、無効電力は無効電力を発生する場合の符号を正と定義すると、
(ね:なの共役ベクトル)
タカ優=り*な
(3.55)
=り*(り。-鴨)/(尺g+ノち)
(3.55)式より
P=揉e・(り2-り・鴨・CO∫♂)+ち・り・鴨・血=封/(Re2+ろ2)
(3.56)
e=(ろ・rり2-り・鴨・CO∫♂卜尺e・り・竹■∫i〃の/(Re2+ろ2)
(3.57)
(3.56),(3.57)式より♂を消去し、な2■り2=P2+e2の関係を使用して整理すると、
(Re2+ち2)・ち2-2(針犯げ・札)+り2一鴨2=0
(3.58)
Vb、R。,Ⅹ。が一定と見なせる間に発電機の過渡動揺により三組の計測量が得られたとする
と、
(Rg2+ろ2)有し2(eJちげJ・Re)+竹∫2一鴨2=0
(3.59)
叱2+ろ2)・ち22-2(e2ちげ2・Re)+n22一鴨2=0
(3.60)
叱2+ち2)′ちj2-2(払・ちげj・Re)+nj2-鴨2=0
(3.61)
(3.59)∼(3.61)式より
(3.62)
尺g=A耳e+β
喝(Jg22-{j2ト2Q(Jg∫2-{j2)+喝(Jg′2一名22)
A=
一2叩g2し名∫2)+2研g′2丁{j2)一2榊g∫2-{22)
一軒∫2-ぱ)(Jg22-{j2)+(㌣2しば)(JgJし名22)
β=
2)・2ろ(Jg′し{j2)一2ろ(Jg∫し{22)
-2叩g2し{∫
(3・62)式を(3.59)∼(3.61)式に代入して尺。を消去すると、
dち2-2わち+c=0
α=い2り)(ちJ2-ち22)
あ=(eノーe2)+A(Pノータ2j」月佑ノ2-ち22J
(3.59)∼(3.
(3.63)
c=り∫2-り22+β2(ちJしち22卜2β(Pノータ2)
61)式より等価抵抗推定値尺。.等価リアクタンス推定値ち.母線電圧推定値鴨は
/1
尺ど
ノ1
=
Aち+β
(3.64)
(3.65)
ト′J.=
(尺2+g…)Jg12-2(q・Ⅹg+ギ・彗)+〔.2
(3・64)∼(3・66)式は発電機から系統を見たとき、発電機が抵抗尺e、リアクタンスち
の送電線を経由して電圧鴨の母線に接続されているように見えることを表している。
76
(3.66)
3.3.4
系統情報推定による厳密線形化
電力系統を厳密に線形化するためには、運転条件や系統の状態に応じて(3.52)式で
示されたフィードバックゲインα(方)、β(方)を計算する必要がある。このα(g).
β(ズ)を計算するためには、発電機電流の内部誘起電圧に対する変化率β朋,β勾を求
める必要がある。
提案する方法においては、電力系統を対象発電機から見て等価的に一機無限大系統とみ
なし、直列抵抗分とリアクタンス分としてモデル化している0β押
βdqは系統の等価的な
抵抗分Reとリアクタンス分ろを用いて(3.67)式のように表現することができる。こ
の抵抗分Reとリアクタンス分量は(3.64∼5)式に示したように、対象発電機の有効
電力、無効電力および端子電圧の実測値のみからから計算することができる。
皮ど
∂i甘
‰=
呪'ぢ+(ge+ズ。')2
ズe+Jd,
∂fd
〟./ぐ=
∂g∴
図3.9
尺ご+(gビ+㌔')2
系統情報を用いた厳密線形化
77
(3.67)
3.4
モデル系統による検討[3
12]侶3〕
検討条件
3.4.1
非線形制御を適用した場合の系統安定化効果を評価するため、図3.10に示す中間負
荷付き一機無限大母線系統モデルを使用して数値シミュレーションを行った。図3・10
ではPSSなしの場合における脱調直前の潮流状態を示している。図3.11にAVRブ
ロック図を図3.12にPSSのブロック図を示す。表3.1に発電機定数を示す。
送電線3LG-0故障に対し、以下の3ケースを検討した。
ケース1:PSSなしでの脱調限界
ケース2:(△P+△w)型PSSを適用時の脱調限界
ケース3:非線形制御を適用した場合の脱調限界
無限大母線
中間負荷付き一機無限大母線系統モデル
図3.10
6・0
∨め
+
U′(PSS)
+
a
+
264
4・5
-知
1
1+0.025
1+25
佑
-4.5
-6.0
〟′:非線形制御出力
Io.084ぶ
嘉川・55
PSS:PSS出力
図3.11
AVRブロック
(』タ/』〟)型PS
図3.12
78
S
表3.1
発電機定数
無限大母線
3.4.2
発電機G2
Ⅹd【p.u.]
1.569
1.651
Ⅹd】[p.u.]
0.324
0.232
Ⅹd"【p.u.】
0.249
0.171
Ⅹq[p.u.】
1.548
1.590
Ⅹq,[p.u.]
0.918
0.380
Ⅹq"【p.u.]
0.248
0.171
Ⅹl[p.u.]
0.204
0.102
TdO,[s】
5.140
5.900
TdO"[s】
0.0437
0.033
TqO,[s】
0.500
0.535
TqO"[s]
0.070
0.078
D[p.u.】
2.000
2.000
wO=27tf[rad/s]
B 掴W-Sec/MVA]
120花
120冗
50.00
9.00
Capacity[GVA]
6000
田
検討結果と考察
各検討ケースの発電機内部相差角、制御出力の波形を図3.13に示す。PSSなしの
場合の脱調限界潮流は1070MWである。(AP+Aa))型PSSを適用時の脱調限界
潮流は1080MWである。非線形制御適用時の脱調限界潮流は1120MWで、(AP
+』〟)型PSS適用時の限界潮流より4%程度多い。故障後の電力動揺により発電機内
部相差角が800程度以上になると、系統の非線形性が強くなる。このような場合、(』
P+』〟)型PSSよりも非線形制御を行ったほうが、発電機の動揺抑制に効果がある。
79
覗魯確酵妄瑳窮
■√一人-・∴く■
■l●■
l}.事々
tt-■
∼1、●E
lt.■■
喜一i与
丁上I空J王EJ
鯵叫
こ
●一、■
∴・一世・`・き
鳩
′
-l▲}■
▲
T
-
-
●
1-
-
硯
一■鑓
■-■■
}■一
■
▼…ノ写一矢告ウウ‖■`千慮▼一
●.寸書
■ゝ
ン′
-.「
兄
.
i
き…j_ト/・・-・∴\
†■●●
●i
享 f琶出力
l一-■つ.一一」n一.■
テ㌃、、\
亡・一事■
-■.t・■-1
一麦■l一′′.-●`・
十ハu書‥「「"‥り一号り一.バり`J
l
p■▼_茎,桑○
一-、J-r-L\÷一・J・-\_一一一丁、---4■tソ・い・・・・1一-・エー・-・T-‥一
持「0
一
1
_■.-
▲
一一-▲
ヰ山一一
-【.▼
拙カ1鱒鱒
てd∧潮力P一㌻■
;.り
1こ
■
■丁▼=
て戸
▼
lt●
l■
■
コ
■'■▼
■■
i.■■
I■●
」
,
■l一■■
-
■
ll■●
一
lt.●■
■
「r
「
「■
li.■●
■
▼--
、▼
-
ll_●ヽ
Iしt◆
(a)ケース1:PS
l▲
与
}
●●■
l」.■●
ll.1■
l■.■t
ll■■
t■
■■
■▼.■■
拘
tI暢lき6℡‡
一▼._
一い㌧叫‥
-十T
〓.-
■-王■ _l暮〔▲.`一つ
;・∴tト・・、、蔓
'ご禁聖霊冊㍗仙
皿「'ウ㌻
サ
t
●、■
」_
人けL‖ノ,
__-._._
._
;一-㌣
-
■fl〉
発推触良揖
\
-一
●【、一
帯誹鮪勅P
l.tt
●.■■
l▲.II
▲L■t
l●.1■
l;.●■
2土_A山)型PS
●【【
丁〟
【恥、Y-■
●■.■●
ぎ'
l.■■
I_■
て■
γ■
リu}
L
_Wノ"
:漸津綬嫡て'-
■1■]」■Ui■■
==i==こi
■.■■
●.■●
蛙■l
l尊.義●
tl."
∫l・●a
…
■一;.●■
-
■●
`■
-▼
-■
■
▲-
■-
ヱ.一
l.●l
†
-コ
子きr血以や■■じi∵-1γ・l77=`こ叫"l"
l
夏 至i発濁解凍露排
l.●●
●.●1
1I.▼一
lヽ.■t
l■-
tl.●■
二
●
‡-
発滝梯自転掛蔽Åこ.J
■-・〝一一■■■■■■■■■■■■■■二■
p-a2%〟
30
.■■■■■■■■丁■■■■
■■t‥-
-}・Z===1===こ・・・・・,・・・・・-・■【
■.■.■■■■…■.……■
㌍額日録撞
安定化効果評価結果
80
■ご■二→,ト・【・▼▼▼....._...._
p一
■.■
■.■■■■`,■
叫-▼遥;㌫-一--‥-'‥-‥t▲
(c)ケー′′月、ス3:非線形制御を適用
図3.13
l
零青
■ノ
Jt一=-轟
℡=腫(占コ亡l
時間(棚
血
†
考丁
一一門二∴,_=_..1-一一一
I_■●
■、-i.
‡
葛当量コ
.÷■
一一.▼
▲コ■.己"
■「■
キ斗‡
苧≡
事酌出力112闇都
上
〟
i
巨
「坤晰'ノて仙′
∧■
.▲_,.._.._
l
仰
1...一】.-一I.I`一.一▼一一:,▲▼■_一▲l「■t・-一
l
官二王-壷.透○
ll・lliit・l_t▼I:、l-
0.3
=
t
S
rl,∴・
■`竃…至と
三==±=透過鱒
「
曽晶t■-廟所叫30
ヤ
封測帥挿拾
吉l帆仙1;
●■
ま
一皿-・一r・皿イ瘍冊≠ヰ皿_冊キ
▼〉__
ー1.へ
r▼・-・・・・-・・-■
㌢∵川か「'-
†
t、
韓離岸抑打力
一●
▲`くl†''
Z中■11h
-=一ニー▼・-・----:-・-・・-----=二:こ:二=::■:111H:=:::二:二:=:三;;=...._._:∴:=_‖_=_
'ト'■-
(b)ケー・ス2:
J憂い.昏
冊mこ▲くt
h.■■
m■一郭亡l
1貯
==こ・h◆▼H■1▼ソ=ヾナ■■:■く◆
/
こ=・・・・-・・=・・・=
ltミ
⊥・.こl!書二J
∵
.1
住3%こ′皿勅
∴
‥塩肝徽
勒
は闇打斗∵・‥・
≡
苦戦≠
▼】一l・l●
下二二、ヽ¶rO"γ
-†.一一き・雷¥7至宝と7`ヰ`多≡え毒=
;一一▲
紆蔓・牒軒
l
J
噂鞘耕
Sなし
-
T車
l・▲
■‥-・・ぷ・㍍-・一二‥:∴′:
◆
肇醐純翻珪角」
■n
●●
‥-
,,晶㌫.…l-=lhl'、-●:-11:!ご滝
■■`■.
30
3.4.3
従来型発電機PSS定数の最適化
(1)一機無限大系統モデル
図3・10に示す中間負荷付き一機無限大母線系統モデルを一機無限大母線系に
変換すると、図3.14のようになる。
無限大母線
図3.14
一機無限大系統モデル
(2)状態空間法によるPSSチューニング【3-Ⅰ6】
図3・14に示す簡略系統を使用してPSSチューニング方法を検討する。
図3.14を線形化ブロックで表現すると、図3.15となる。
図3.15
一機無限大系統の線形化ブロック線図
81
図3.15に示したブロック線図において各ブロック要素の入出力関係は以下の
(3.68)式で表される。発電機モデルは1質点の伝達関数モデルとし、界磁回路、
AVR制御ブロック、PSS制御ブロックも伝達関数表現としている。
-(△7セ+∂△の)
△の=
肋
△∂=竺坐
∫
gAgβ
g3g4△∂
△eヴ'=
(1+g3㌦ぶ)(1+g3rニ。∫)
(3.68)
△㌔=gl△∂+g3△e。
△eJ=g5△∂+耳△e9
(1+ち∫)△且。
△たノ.ノ=
(1+r∫)
g。(△e吋-△ピー)
△g。=
(1+ち∫)
ここで
』♂:内部相差角変動分
〟0=2花fo,′0=50
S:ラプラス演算子(=j(D)』〟:発電機角速度変動分』ろ:電気トルク変動分
』助ノ:内部誘起電圧変動分
A‰‥界磁電圧変動分
』P。:有効電力変動分
タ(カ:PSSブロック
』(ぷ:AVRブロック
C(カ:界磁回路伝達関数
(3.68)式は(3.69∼71)式のように行列を用い状態空間表示することができる。
Ⅹ=AX+占〟
(3.69)
Ⅹ′=(』〟,』♂,』g。,出ね∠峨)
(3.70)
が=(0,0,みj,あ4,0)
(3.71)
82
A=
α1β4
0
d2
㌔輿
0
α5
α3
0
㌔り
glの0
(Jl=
0
〃
=0
0
0
000
0
_β/〟
α
1。
肋(笠一方5)
肋r3(竿一方5)
rlr2
(3.72)
α4=
(Jb
r2
rl
gdr3g6
(J9=-
1r2g2
α8=
dl(I=
み3=言 ゎ4=貰
叫吋
PSSゲイン最適値は以下のリカッチ方程式を解くことにより得られる。
ArP+翔一Pみ尺
(3.73)
甘P+e=0
評価関数′を最小にするフィードバック制御入力変数〝を求める。
(3.74)
J=0.5/。Cク仔eg+ぴR〟ノdr
ここで
e=diαg(0.04,0.001,0.001,0・001,0・04)
(3.75)
尺=didg(1,1,1,1,1)
フィードバック制御入力変数〟は(3.76)式により求められる。
U=_虎
以=14・8∠4〟
(3.76)
甘アズ
-0・0130』♂
-0・0315∠4g。
≒14.8』〟-0.1152』㌔
0・0120』ちび -0・1152』㌔
(3.77)
83
3.5
シミュレータ試験による検証【3▲14】[3
15]
3.5.1シミュレータ試験の概要
(1)全体構成
微分方程式で表現された制御系を基にして制御系設計ツールMATLABを用いて
制御ブロックのデータとして作成する。この制御ブロックのデータを任意制御ブロック
構築ツールによりコンパイルすると、発電機制御装置の実行プログラムを作成すること
ができる。発電機制御装置の概略制御ブロックを図3.16に示す。発電機制御装置の
入力は発電機角速度仇有効電力P、無効電力¢、端子電圧V′である。また出力は励
磁系制御信号Ufとガバナ制御信号U。である。発電機の内部電圧等については、発電
機自端のP,¢,VJ,〟のみから演算により求める方式とした。
微分演算ブロックとして単純に微分要素を使用すると、ノイズ等の要因で演算不安定
現象を起こす恐れがある。そこで微分要素は以下のように工夫した。
信号5gを入力して下記の計算式(最小自乗法による直線近似式の勾配*)より、そ
の5gの微分を計算する0
おg
2伊ぶgo+10*∫gノー腔∫gゴー20穣ぶgィ*1
dr
dJ
(3.78)
100
ぶgo………現在鞄
∫g∫………1サげル前の鞄
ちj………3サげル前の鞄
∫g4………4サげル前の鞄
dr………刻み時間(パラメータにて設定)
図3.16
概略制御ブロック
84
*最小自乗法による直線近似式の勾配
最小自乗法による直線フィッティングの考え方を図3.17に示す。
角速度
偏差』〟
切片
ム
0
わ
わ
わ
ね
ね
時刻
」J
<
図3.17
>
最小自乗法による直線フィッティング
』〟が時刻=こ比例すると仮定し傾きをa切片をカと仮定する。
』〟=dJ+b
すなわち
5組の実測データを
(3.79)
〃J,』叫ノ,存2,』〟2ノ,(ら∠れ叫ノ,
〃J.」(カノ,
存5,』〟5ノとする。
観測データに最も近い直線関係を記述するa∂を最小自乗法により選定する。
すなわち
(3.80)
e=∑†』叶(叫+桝)2
i=J
を最小にするような∂とカを求める。(3.80)式は凹の2次式だから、eを最小にす
る∂とカは、(3.80)式をそれぞれ∂と∂に関して偏微分して零点を求めればよい。
これより
8=(n∑ち』叫-∑ち∑』叫)/♂
(3.81)
わ=(∑ff2』叫2-∑ff∑ff』叫)/♂
(3.82)
♂=n∑ff2-(∑が
(3.83)
〃=5,ff=J∫+
糾ノ』′の関係を用いて♂を計算すると、
♂=50∠1r2
d=(20』〟5+10∠4叫-10∠4〟2-20』叫)/100・』′
このαが』〟の変化率を与える。
85
(3.84)
(2)
シミュレータ試験設備
①電力系統シミュレータ
全ディジタルタイプの電力系統シミュレータ(RTDS)にて発電機、交流系
統をモデル化した。シミュレータ試験の装置構成を図3.18に示す。
②非線形制御装置モデル
実効値ベースディジタル解析によって制御動作を確認してから、対話型エンジニ
アリングツール(MATLAB/
SIMULINK)でブロック図としてモデル化
した装置の動特性を、自動的にC言語に変換、コンパイルしてDSPに実装した。
ケーブル接続
ワークステ
-ンヨン
非線形制御装置
図3.18
3.5.2
シミュレータ試験の装置構成
シミュレータ試験条件
非線形制御を適用した場合の系統安定化効果を評価するため、図3.19に示す中間負荷
付き一機無限大母線系統モデルを使用してシミュレーションを行った。図3.19ではPS
Sなしの場合における脱調直前の潮流状態を示している。送電線3LG-0故障に対し、
以下の3ケースを検討した。
ケース1:PSSなしでの脱調限界
ケース2:(』P+』〟)型PSSを適用時の脱調限界
ケース3:励磁補助制御に非線形制御を適用した場合
佑=1.025
V=1.0
jO・108
無限大母線
図3.19
中間負荷付き一機無限大母線系統モデル
86
3.5.3
シミュレータ試験結果
各検討ケースの発電機有効電力、角速度偏差、制御出力の波形を図3.20に示す。PS
Sなしの場合の脱調限界潮流は1070MWである0(AP+A〟)型PSSを適用時の
脱調限界潮流は1080MWである0非線形制御適用時の脱調限界潮流は1100MWで、
(』P+』〟)型PSS適用時の限界潮流より2%程度多い。故障後の電力動揺により発
電機内部相差角が800程度以上になると、系統の非線形性が強くなる。このような場合、
(』P+』〟)型PSSよりも非線形制御を行ったはうが、発電機の動揺抑制に効果があ
ると言える0シミュレータ試験による安定限界(系統事故後脱調する直前の発電機出力)
の評価結果を図3.21に示す。
1070MW
l■■■■■●■-
∠】dノ
八
u
/\
H 凹
H
<
u
和
/ \/
Y
ヽノ
>
t句色■L両州■■■
■
▲
■
時間(秒)
■●■■
30秒
ll・■l■■L_
脈
l山
△山l
帥¢-l.叩-■■●∨■■れ・」■
し
時間(秒)
1100MW
図3.20
シミュレータ試験結果の波形
87
安定
限界
1 14 0
1 12 0
冊椚
1100
こ言:
蚕∃言
璽
弊
蕪
司:■
整
髪・
1 08 0
岩道義・■
寵=誠
喜'
昔
■#
善
第
零・.・
墓
i覇
蛋′
彗宍・・
n
図3.21
3.6
.・皇
n
‡
補助制御
従来型
非線形
なし
PSS
制御
安定限界の比較(シミュレータ試験)
結言
電力系統機器の制御に非線形制御という新しい制御方式を適用することにより送電系統
の送電可能電力を増大することを目的に研究を進め、以下の結果を得た。
(1)発電機励磁制御系へ非線形制御を適用した場合の基本制御アルゴリズムを開発した。
(2)非線形制御はその厳密性のために、モデルパラメータ変動等のモデル誤差に対するロ
バスト性に問題がある。電力系統の状態変化というパラメータ変動を発電機から系統を
見た時の等価的な電圧、インピーダンス変化により検出して、その結果を厳密線形化の
ためのフィードバックゲインに反映させる手法を開発した。このローカルな計測量のみ
から系統モデルを推定する手法は他の制御方式にも適用できるものである。
(3)発電機の非線形制御ブロックを数値シミュレーションにより検討した。さらにデ
ィジタルシグナルプロセッサー(DSP)を用いて制御装置を試作して、非線形制
御の効果をシミュレータ試験により検証した。
(4)非線形制御を実用化する上で問題となる微分演算の代わりに、最小自乗法による
直線近似式の勾配を計算する方式を新規に工夫して採用した。この方式によりノイ
ズ等による演算不安定現象を避けることができ、非線形制御が有効に動作すること
を確認した。
(5)非線形制御は従来型PSSに比べて2%(シミュレータ試験)から4%程度(数
値シミュレーション)安定限界出力が増加することが確認できた。安定限界出力と
は発電機が脱調する直前の出力である。
88
参考文献
3.7
[3-1】電気学会技術報告、第64.8弓:「新世代の制御理論応用」、新世代の制御理論応用
調査専門委員会(1997.8).
[3-2]Qiang
Lu,Yuan
Zhang
Sun:"Nonlinear
Stabilizing
ControlofMulti-maChine
Systems,,'
IEEETransactionsonPowerSystems,Ⅵ)1・4,No・1,February,P236-241(1989).
【3-3]J・W・Chapman,M・D・Ilic,C・A・King,L・Eng,H・Kaufman,"Stabilizing
a
Multi-maChine
PowerSystemviaDecentralizingFeedbackLinearizlngExcitationControl,"IEEETransactions
OnPowerSystems,Vbl.8,No.3,August,P830-839(1993).
【3-4]C・A・King,J・W・Chapman,M・D・Ilic,"Feedback
Linearizing
Excitation
Controlon
Full-ScalePowerSystemModel,''IEEETrans・OnPowerSystems,Vol.9,No.2(1994).
【3-5】高木康夫、曾我部敏明、平山開一郎、重政隆:「空間線形化を用いた電力系統安定化の
設計」計測自動制御学会論文集,Vbl.29No.2194/200(1993).
【3-6】南部雅彦・大澤靖治:「微分幾何学的アプローチによる非線形システムの厳密線形化の
応用」平成6年電気学会全国大会(1994).
【3-7】南部雅彦・大澤靖治:「発電所内情報を利用した非線形補償形系統安定化制御方式の
開発」電気学会論文誌B,116巻6号,平成8年(1996).
[3-8]A・Isidori:"NonlinearControISystems,"SecondEdition,Springer-Verlag,(1989)・
【3-9】石島辰太郎、島公幡、石動善久、山下祐、三平滴司、渡辺敦:「非線形システム論」、
計測自動制御学会編(1993).
【3-10]J.Wu,A.Yokoyama,Q.Lu,M.Goto,H・Konishi,'MIMODecentralizedNonlinearConh・0l
OfGeneratorandTufbinetoEnhanceTransientStabilityofPowerSystem,"Trans・IEEofJapan,
Vol.121-B,No.2(2001).
【3-11】大塚敬、山田祐造、田中裕幸、禰里勝義、横川純男、植木芳照:「電力系統の等価電
圧、等価リアクタンスの推定」、電学論B、61-B93,VOl.1069,793-800,(1986).
【3-12】世古口雅宏、小西博雄、後藤益雄、横山明彦、qiang
Ln:「非線形状態方程式の厳
密線形化手法による発電機励磁制御」平成13年電気学会全国大会(2001).
【3-13]M.Sekoguchi,etal:`NonlinearStabilizingControIUsingState-SpaceLinearization',Bulk
PowerSystemDynamicsandControIV,August26-31,Onomichi,Japan,(2001)・
【3-14]世古口雅宏、小西博雄、後藤益雄、横山明彦、QiangLu:「非線形制御を適用した発
電機励磁制御装置のシミュレータ試験結果」平成13年電気学会電力・エネルギー部
門大会(2001).
【3-15]M.Sekoguchi,H.Konish,M.Goto,A■Yokoyama,QiangLu:'DecentralizedNonlinear
StabilizingControIUsingState-SpaceLinearization,,inproceedingsoftheIEEEPowerEng・
Soc・WinterMeeting,NewYork,January(2002)・
【3-16]P.Kundur,"PowerSystemStabilityandControl,"EPRIPowerSystemEngineeringSeries,
McGraw-Hill,Inc.,NewYork,NYlOO20
89
a
3.8
付録
式(3.43)において、rは以下のように定義される。
γ=gニJ。+gニJ。+gニf。+-ゐ
(付3.1)
の0
Jd,)。の偏微分を計算するため、文献【3,3]tこよれば次の二つの変数(D。。,D。。)
が必要である。
(付3.2)
βd㍉篇か朋=篇
(付3.3)
芸=喜=喜
=βdヴ
哨
∂g∠
(付3.4)
警遡
∂gニ
=_上)
ヴヴ
(付3.5)
型些生=。
∂gニ 錐ニ
式(3・30)において、あ(ズ)=巧は以下のように詳細に表現することができる。
ぶ1(ズ).ぶ2(ズ)・ぶ3(ズ)
わ(ズ)=
+
り+■
(付3.6)
二㍍・㌣
ここで
(付3.7)
埴)=帰一(ズま)2yノ。+が鵠桓一物)
(付3.8)
ぶ2(ズ)=軌β朋・gニー明か勾一丁。亮+(Jま)2J。β。。〉
(付3.9)
帥)=ト焉-(ズ。一項。+㌔]
(付3.1)から(付3.6)を用いて,式(3.44)における
慧,若晋と塑
∂gニ
は以下のように計算できる。
=錘一和い碑。‡
(付3.10)
r
左触ヴ+gこ一脚q-∫ふ棚勾)(付3
∂ム(ズ)1
∂∂
-〔2
聖㌔(わ+ち(ズ)塑
∂∂
∂∂
∂ぶ1(ズ)
+
∂∂
(付3.12)
90
∂あ(ズ)1
∂E三=り2
(付3.13)
ここで
豊北一棚一′言)+岬。]・(〟一吼)
(付3.14)
∂ぶ2
=(硝。+㌔吼。)(ズ言一方ま2)+郁。+g∠β朋)
∂∂
∂ぶ3
(付3.16)
=(ズ。-ズま)J。
∂∂
(付3.15)
而=錦町(現一居直㈲]
(付3.17)
r
∂∫1
叫
珊言-ズ珊如いか。ノ。)+ズニ′。.瑚β朋]・(の-の。)(付
∂ぶ2
(付3.19)
=(ズ言か孟+1-2ズまか勾-ズま2ヱ)孟)
∂gニ
(付3.20)
∂∫3
=-1-(ズ。-ズま)β。。
∂gニ
∂り
叫
錘兢璃一兢)(1一概)】
J
91
(付3.21)
第4章
非線形最適制御STATCOMによる系統安定化
はじめに
4.1
最近電源立地難のため電源は遠隔地に設置する傾向が顕著になってきており、電力系統
は長距離送電線による大容量送電の傾向を持っている。このような動向に対し安定度を向
上するために、電力動揺抑制機能を付加したSVCを発電機端に設置する例が見られる
【4-1]
更に、既存の送電設備は、電力規制緩和の環境のもとで、予期し得ない潮流状態が発生
し、熱容量限界まで有効に利用されることもあり得る。FACTS機器は送電能力を増強
するために計画されるが、この機器は非線形な運転領域でも使用されなければならない。
従来の電力系統では、それ自体の非線形性に対してある運転点での線形近似の制御が行
なわれている。一方、制御理論の分野では、微分幾何学論に基づく「厳密な線形化手法」
という非線形制御理論が構築されてきた。このような状況を踏まえて、本論文では対象の
非線形性を考慮した非線形制御システムの構成法を開発し、実際面から検証することを目
的としている。
「厳密な線形化手法」は従来の近似手法と異なり、対象のモデルに対して、状態量の非
線形写像と非線形フィードバックの適用により対象を等価的に線形系に変換する手法で
ある。しかし、電力系統モデルを非線形な微分方程式で表現したまま、直接制御系を構築
するという手法を採用すると、モデルを多数の状態変数で表記する必要があるという問題
がある。このため非線形制御では電力系統を構成する送電線のリアクタンスや発電機位相
角等の遠隔地の状態量を計測し、制御入力とする必要がある。
近年同期計測技術が電力系統の分野でも導入されつつあり、遠隔・多地点の高精度な位
相角情報等を容易に利用可能となっている。海外の文献[4-18]によれば同期計測で得られ
た情報を電力系統安定化装置(PSS)の入力に使用して系統の動特性を改善する試みが
なされている。そこで本論文では遠隔地点の情報が入手できるものとして、自励式無効電
力補償装置(STATCOM)の非線形制御による系統安定度向上の可能性を定量的に評
価した。
従来からSVCに関してはかなりの文献がある。文献【4-2】[4-3]には自励式無効電力補
償装置(STATCOM)の実用的な構成や設計方法が述べられている。しかしながら、
文献[4-4][4-5][4-6][4-7]にあるようにSVCのコントローラは従来の比例積分(PI)
タイプである。明らかに、PIコントローラの能力は、電力システムの安定性改善の面で
限界を持っていることは知られている。最近では系のロバスト性を実現するため〃00ーア
プローチがSVCの補助制御を設計するために使用されるようになっている【4-8]…。
電力システムは典型的な非線形システムであるので、非線形制御理論を使用して、ST
ATCOMのための補助制御装置を設計することは合理的であると考えられる。しかし筆
92
者の知る限りSTATCOM非線形制御の設計や電力系統安定化のための補助制御装置
の効果についてはほとんど議論されていない。
本稿は以下のように構成されている04・2・1節は、STATCOMを含む一機無限大
システムの非線形状態空間モデルを示す04・2・2節で座標変換および動的なフィードバ
ックによる厳密な線形化技術および線形化されたシステムでの線形コントローラの設計
方法を記述するo4・2・3節ではSTATCOM非線形制御システムの全体構成を示す。
4・3節は数値シミュレーション、4・4節はシミュレータ試験による検証結果を述べる。
4・2
厳密線形化手法のSTATCOM制御への適用
4・2・1STATCOMを含む電力システムの状態方程式
異なる条件下でのSTATCOMの応動を検討するため、単純化されたモデルを採用し
た0図4・1は、その電力システムに対応する等価回路を示す。STATCOMは、一機無
限大母線システムの送電系の中間点に接続されると想定した。このシステムにおいて発電
機内部状態は(4・1)式に示す回転子運動方程式で表される0発電機G2の定数とAVRブ
ロックを4.7付録に示す。
去=△甜ふ=錬-モー芸△]
但し
6‥発電機内部相差角(rad)a):発電機角速度(rad/s)
2H:慣性定数(MW・S/MVA)D:固有ダンピング(p.u.)
jL:機械トルク(p・u.)
ちノ
ろ:電気トルク(p.u.)
無限大母線
佑
図4・1STATCOMを含む一機無限大系統モデル
送電線とSTATCOMの間の電磁気的な過渡現象の発生する時間領域を無視すると、図
4・1より発電機の有効電力は(4.2)式で表現することができる祈10】∩
93
(4.1)
g/リ
焉=
∫
マ
(4.2)
Sin(ぎ
gl+方2+ズ1g2β。
ここでXl,X2はそれぞれ発電機内部誘起電圧からSTATCOM設置点までのリアクタン
スを表しており、発電機、変圧器や送電線のリアクタンスを合計したものである。g。,は発電
機内部誘起電圧、Ttは系統電圧、Bcは設置点から見たSTATCOMの等価サセプタンスで
ある。
さらに発電機内部誘起電圧ち'や機械トルクP,れを一定と仮定した場合、上記の一機無限大
母線システムは式(4.3)に示す非線形状態方程式で記述することができる。
∂=△の
綽一芸
∴一完
P一ニー△の一
肌
ここで、♂帆
J章二、
gl+g2+Ⅹ1g2βc
sin∂])(4・3)
叫研ま状態変数で、βcは制御中間入力である。制御入力を(4.4)式のよ
うに選ぶと、.
1
(4.4)
ズ1+Ⅹ2+ズ1Ⅹ2β。
(4.3)式はアフィン非線形形式として(4.5)式のように書ける。
(4.5)
ズ=′(ズ)+g(ズ)・〟
ここで
g=【の ∂r
隻(P椚_ヱ△の)
2方
′(Ⅹ)=
(4.6)
吼
△丘)
4.2.2
厳密線形化によるコントローラの設計【4
16‖4-17】
(1)座標変換とフィードバックによる厳密線形化
(4.5)式で表わされた非線形システムを座標変換とフィードバックで厳密に線形化する
ことを考える。すなわち(4.7),(4.8)式に示す、新しい出力Zと新しい入力Vを考える。
Z=¢
αノ
(4.7)
(4.8)
〝=l〝β(カーα(カ/β(カ
状態方程式(4・5)がフロペニウスの定理を満足すれば、関数ゐ(X)が必ず存在する。この
ゐ(X)を用いてシステムを線形化する座標変換とフィードバックのひとつは、
94
Z=¢砂=
(4.9)
y
α(ズ)
〟=
β(J)β(ズ)
(4.10)
=エgちゐ(ル+ぢ力(ズ)
上式の′似に関するカ似のリー微分は(4.11)式で表される。
中(ズ)=塑・拍)
∂芳
(4.11)
1/β酬ま入力変換ゲインであり、α(・)/β(.)はダイナミック線形化フィードバックのゲ
インである【州。α(幻,β(Ⅹ)の導出については、4.7付録を参照。
図4.2
(2)
非線形システムの厳密線形化
線形コントローラの設計
線形化されたシステムは(4.12),(4.13)式で表現される。
Z=A・Z
+B・V
(Brunovsky正準系)
Z=[』a血]y=P′,γ2】
(4.12)
(4.13)
A=[Zニ]β=[冒]
上記の線形化されたシステムに対する最適制御則は
l′=
右」′デ
人ご」(ノノ
(4.14)
最適制御コントローラを設計するため、多入力多出力システム(4.12)に関して、評価指
95
標J(4.15)式を選定した。
(4.15)
J=/。∝仔reZ・而り
評価指標Jを最小にするフィードバック制御入力変数rは(4.16)式により計算できる。
l′=
(4.16)
一尺Jβや∬
ここでPは次のt」カッチ方程式の非負の解である。
(4.17)
Aや+翔+e-Pβ灯Jβfp=0
重み行列e,月を(4.18)式のように選定すると、
(4.18)
e=diag(2,0)
尺=diag(1,1)
制御入力変数γとして
γ=-1.0△∂
(4.19)
-J吾』〟
(4.10)式および(4.19)式から、非線形システム(4.5)式の非線形制御入力〟
は(4.20)式で与えられる。
上)
_た+_。の+竺(_。∂_√払β)
Eニ㌔sin∂
d)0
(かo
〟=
(4.20)
(4.20)式を(4.4)式に代入することにより、STATCOMに対する無効電力指令
β。を得る。
gニ㌔sin∂-(gl+ズ2)(た+竺△∂+竺β△の)
d)o
β。=
d)0
(4.21)
Ⅹ1g2(た+竺△∂.竺J払の)
の0
の0
(4.1)式を用いると、(4.21)式は次のように表現できる。
Ⅹ1+ズ2
β
C
=_
i
羊
〟0
キア
α)0
2ガ
二.丁耳さ
〟0
上式がSTATCOMに対する非線形制御による無効電力指令Bcを与える。
96
・
(4.22)
二三ニフ〟二;三
4.2.3
STATCOM制御装置の全体構成
図4・3は非線形制御システムの全体構成を示す。非線形コントローラの入力時ローター
の角速度〟、有効電力P、無効電力e、電機子端子電圧り、系統電圧K、系統リアクタンス
Xl・X2および発電機内部相差角♂である。非線形コントローラの制御出力uはSTATCO
Mに対するq指令である0系統のリアクタンスⅩハズ2はこのe指令を計算するために必要
である0発電機内部相差角』♂は実効的な内部誘起電圧占守,と電機子端子電圧りとの位相
差である。内部相差角』♂は(4.23)式により計算できる。
△¢=arCtan(賢)
(4.23)
拓は電機子端子電圧のd軸成分であり、均はq軸成分である。系統電圧竹を基準とした
発電機の内部相差角は(4.24)式によって計算される。
♂=
¢・ん4♂
(4.24)
ここで剖ま系統電圧覧から発電機端子電圧までの相差角である。得られた内部相差角♂は、
非線形コントローラのために入力信号として使用される。
制御入力
図4.3
制御システムの全体構成
97
4.3
モデル系統による検討【4
4.3.1
12]
数値シミュレーション条件
非線形制御を適用することによる系統安定化効果を評価するために、STATCOMを設
置した1機無限大母線モデル(図4.4)を使用してディジタルシミュレーションを実施した。
図4.4は補助制御が適用されない場合の初期の潮流条件を示す。STATCOMの容量は
100MVAとした。発電機、3つの低圧タービン・セクション(LP)および高圧のタービ
ン・セクション(HP)を5つの質点よって表わした。(図4.6を参照)
図4.5は、電圧制御と系統安定化のための線形補助制御ブロックを示している。非線形
制御では発電機角速度偏差を微分して、制御出力を演算しているため、軸ねじれ振動成分除
去用ノッチフィルタを角速度偏差信号入力回路に設置した。遠隔地からの入力信号の伝送時
間遅れは本稿では考慮されていない。シミュレーションは瞬時値ベース過渡現象解析プログ
ラム(EMTDC)を使用して実行した。大規模な電力系統の相互連結から生じる安定度問
題は低周波動揺現象により引き起こされる。そのような低周波の動揺(約0.5Hz)は、
中間負荷を備えた一機無限大母線モデルで発生させることができる。電力動揺の周期が約2
秒である場合、非線形な運転領域に入る時間は長くなる。この場合、従来の線形補助制御で
は電力動揺抑制効果が小さくなる可能性がある。以上のような理由により、次の3つのケー
スを送電線3LG-0に対し検討した。
ケース1:STATCOMの補助制御なしでの脱調限界
ケース2:線形補助制御STATCOM適用時の脱調限界
ケース3:非線形補助制御STATCOM適用時の脱調限界
無限大母線
図4.4
一機無限大母線モデル系統
98
系統電圧△払
+
送電線潮流△ろ′〝e
角速度偏差』〟
軸ねじれノッチフィルタ
図4.5
定格電気出力
1.Op.は
線形補助制御ブロック図
各タービンの定格機械入力(出力分担比)
0.218p.u.
0.218p.u.
0.218p.u.
十
+
↓
麒2
〟/
+
↓
〟
〝/ク
甜朋
佗タ
LPB
LPC
仰形
LPA
〟/:3.222
〝/ク:78.929
船
彪ワ:58.415
4.777
麒7:4.676
〟こ材:54.094
J〝:4.621
膵:29.658
鹿町 0.了09
図4.6
0.346p.u.
発電機軸系モデル
99
HP
数値シミュレーション結果
4.3.2
発電機ローター速度、発電機有効電力、系統電圧、制御出力の波形を図4.7に示す。補助
制御のない場合の安定限界は960MWである。線形補助制御入力を印加した場合の安定限
界は1040MWである。非線形補助制御入力を印加した場合の安定限界は1100MWで
ある。すなわち、非線形補助制御を付加した場合の安定限界は、約6%程度従来の線形制御
より大きくなっている。発電機内部相差角が系統故障後に約80度以上になる場合、電力シ
ステムの非線形特性は強くなる。このような場合では、非線形制御が従来の線形制御より大
きな効果があると言える。安定限界の比較を図4.8に示す。非線形制御の効果は従来形の
PI制御より良い結果となっている。
3LG-0
発電機角速度
〟
3LG-0
50s
時間(秒)
3しG-0
38s
払
50s
時間(秒)
発電機蒜効電力PG
HH
l
11♂
系統電圧
圭▼ 臼
HH
H
岳
山
960MW宣二二:
.汽…Jい\岨
蓼
【ト
ヨ
○▲
0
箪
0
・…!
38s
ケース1
325
3LG-0
(rad/S)325
820
∩
u川 ⊥
▼
官
発電機角速度
要l
u円
q
補助制御なし
〟
3LG-0
l
1.5p.u.,.ら
系統電圧佑。
Ym
u
l.25
W
P
竿
旦
円
四
l∧
1
き†5
日当。E
300
50s
時間(秒)
仁一ーートー・-
0.乃
8.5
0p.u.0
脚
朋
38S
時間(秒)
50S
輩
●○
▲1
▲2
▲】
●4
ヰ5
▲d
38S
17
鵬
40
S8
50S・
時間(秒)
3LG-0
3LG-0
発電街効電力昂
線形制御出力
1040MW
々58
棚
時間(秒)
ケース2
図4.7a
50s
-0.5
38s
線形補助制御あり
数値シミュレーションの結果1
100
時間(秒)
50s
3LG-0
諏
時間(秒)
39
亜
系統電圧
〃
雌
鳥
小
0・5聖・刑
250
1100MW
0三
-
・258
-0.5
38s
50s
時間(秒)
ケース3
非線形補助制御あり
図4.7b
数値シミュレーションの結果2
′一lヽ
岬50
.1l
安
110 0
脚勧岬
発
一■ノ・'▲'・■・、
ミ≧写=-三`=-ン=
=====≡茎
三き三妻き茎
+■・-ノ・■:'・'く・■▲
三重妻妻
・:・=・=。=重
■・:・:七`写く重
萱写:,.吉シニ・J
天く:て・:七ゝ:蕃
■J・■・、′-'-■.::
:重量言:
、二≠三毒毒;塁:喜;
毒彗票重量
苦言三:豆▲:・:::
==:写:毒=▼=・=;≡
亡、ココニ■=萱.
ーー7三〉・--
喜…書き=`=・鱗:=■=■ン`'・ユ
90 0
:く萱声妻:重宝-ふ.
畳=く:こ:孟春≧蓋:
:二;こ:::▲:蓋:::::
・:
`ン:
ンニ`∧-"‡
コ:ウ÷:くこ・:二こ
,■,:・二≦:・フ=.=
=≦萱萱≡
≡:■圭主
:一二,:亡,:王
看き蔓茎
萱二▼.・:,吾
三毛::ヒ:プ:至.
た・〉:・二■=づ一っ=く▲=
-=・:・:・:・:・:・=・:::___...
王墓雲:::
享毒:くく・:・二く・二
:・・一▼.・、・・・・
,=く壬て堂:ざ:
=…董書
:■弓::こ=≡::誓=:=:
:+∴:▲_こヾコニ:■
図4.8
富
:王立::王事:二:三
95 0
00
:j
・■・■:く■{■く・■.■.
10 00
(
司
nn
q
:::::・云
:
.1
0 50
50
補助制御
従来型
非線形
なし
pI制御
制御
安定限界の比較(数値シミュレーション)
101
心
購
lT
18
時間(秒)50s
38s
50s
佗
n
u
n
ヰ9
封
4.4
シミュレータ試験による検証【4
4.4.1
シミュレータ試験装置
(1)
13】【4
Ⅰ4】【4-15】
電力系統シミュレータ
全ディジタルタイプの電力系統シミュレータ(RTDS)にて発電機、交流系統をモデ
ル化した。
(2)
非線形制御装置モデル
図4.9にシミュレータ試験の装置構成を示す。実効値及び瞬時値ベース数値解析によっ
て制御動作を確認してから、対話型エンジニアリングツール(MATLAB/SIMULINK)でブロッ
ク図としてモデル化した装置の動特性を、自動的にC言語に変換、コンパイルしてDSP
(Digitalsignalprocessor)に実装した。
ケーブル接続
図4.9
シミュレータ試験の装置構成
(3)STATCOM制御ブロック
図4.10に、STATCOMの制御ブロックを示す。PQ非干渉ベクトル・コントロ
ールシテムは、高速DC電圧制御および無効電力制御から成る。非線形最適制御信号は無
効電力制御のために使用される。電圧型自励式変換器(VSC)は、PWM/てルス発生器
の出力によって制御される【4
11】。
らこ有効分電流指令
竹dニd軸電圧指令値
v由了
∂相電圧指令値
Jqニ無効分電流指令
V桓ニq軸電圧指令値
v肋ニ
b相電圧指令値
侮ニ
図4.10
STATCOM制御ブロック
102
C相電圧指令値
非線形コントローラの計算時間刻みは約2ミリ秒である0ディジタル・シミュレータ内の
波形は、雑音やサンプル、ホールドなどによって歪んでいる0このため、サンプリングタイ
ミング毎に、変化率を単に計算するのでは、計算誤差が大きくなる0また、システムは不安
定となる0そこで、微分演算は次のように行った0現在値および4回の過去のサンプル値を
基にして、近似一次直線の傾きを最小二乗法によって求め、信号の変化率を計算した。
4.4.2
シミュレータ試験の条件
非線形コントローラを適用した系のシステム安定化効果を検証するために、シミュレータ
試験でも、数値シミュレーションの条件に合わせて、図4.4で示された中間負荷の存在す
る一機無限大母線系統モデルを使用して検討を行った。シミュレータ・テストでも、数値シ
ミュレーションの初期潮流条件に合わせて試験を実施した。
4.4.3
シミュレータ試験結果と考察
発電機有効電九角速度偏差および制御出力信号の波形をそれぞれ図4.11a∼bに示
す。補助制御のない場合の安定限界は1130MWである。従来形のPI制御の場合は11
50MW、非線形制御を付加した場合の安定限界は1160MWである。非線形制御の効果
は数値シミュレーションの結果ほど顕著ではない。今後シミュレータ試験の条件を変化させ、
さらに評価していく予定である。
安定限界の比較結果を図4.12に示す。非線形制御の効果は線形制御の効果と大きな差
はない。シミュレータ試験では数値シミュレーションほど効果の差が出ていない。
3LG-0
3LG-0
発電機角速度偏差』〟
発電機有効電力島
庄≠■の′llt洲
ヨ
例
\
n
′
n
0
‖
時間(秒)30s
時間(秒)
(a)ケース1
図4.11a
補助制御なし
シミュレータ試験の結果
103
30s
3LG-0
発電機角速度偏差』〟
】tW
3LG-0
レ††ン!き●
H
n
⊇
\
1150MW
」
n
H
l 迦持
f
岳
H
l
n
時間(秒)30s
豪.禁霊
u
l
肌
0
P
i
芦
き 【n
H
H
uナ`ィン1さ1
‖
'1H"
」
発電機有効電力鳥
■■11加
時間(秒)30s
線形岬些
澗
}「コーヨ如
「=
0
i
u
‖
0 l
時間(秒)30s
(b)ケース2
線形補助制御あり
3LG-0
王T▲T
発電機有効電力鳥
Ⅷ
止
.よ,芝≡ご発電機角讐讐差』〟
8
し
u1
Ⅷ
u
u
呵
時間(秒)30s
非線竺禦.讐出力
釘▲⊥tご±≡-0
30s
時間(秒)
(c)ケース3
図4.11b
非線形補助制御あり
シミュレータ試験の結果
2 00
安
脚馴岬
発
15 0
一-0 0
05 0
(
0 〇0
図4.12
補助制御
線形補助
非線形補助
なし
制御
制御
安定限界の比較(シミュレータ試験)
104
4.5
結言
電力系統機器の制御に非線形制御という新しい制御方式を適用することにより送電系統の送
電可能電力を増大することを目的に研究を進め、以下の結果を得た。
(1)自励式SVC(STATCOM)へ非線形制御を適用した場合の基本制御アルゴリ
ズムを開発した。
(2)実用化のための検討を進め、制御装置の試作、及び試作制御装置を用いたシミュレ
ータ試験を行い、非線形制御の有効性を確認した。
(3)非線形制御は線形補助制御に比べて約1%(シミュレータ試験)から約6%程度(数
値シミュレーション)安定限界出力が増加することが確認できた。
(4)制御装置の概念設計を行い、実用化装置の仕様を提案した。
本研究では制御アルゴリズムの開発、制御装置の試作等中心課題は達成したが、効果評価に
ついては限定条件で行っており、種々の条件下での試験等を今後も継続して進めたい。
4.6
4章の参考文献
【4-1】坂野鉱一、佐藤佳彦、斎藤義孝、高橋三幸、千円卓二、広瀬俊一、後藤益雄、中村知
治、佐藤勝男:「静止形無効電力補償装置(SVC)の発電端設置例」日立評論
No.12(1994.12).
【4-2】鈴木健一、中島達人、小西博雄、中村知治:「自励式無効電力補償装置の制御方式の
開発」電気学会論文誌B,112巻,1号(1992).
【4-3】鈴木健一、矢島正士、野原幹也、上田茂太、佐藤博康、江口吉雄:「50MVA自励式
SVCの制御方式」電気学会論文誌B,117巻,7号(1997).
【4-4]A・J・P・Ramos,H・Tyll,"DynamicperfbrmanceofaRadialWeakPowerSystemwithMultiple
StaticVarCompensators,''IEEETrans-OnPowerSystems,Vol.4,October(1989).
【4-5]T・Sawa,etal・,'AFieldTestofPowerSwingDamplngbyStaticVarCompensator,"IEEE
Trans,OnPowerSystems,Vol.4,No.3(1989).
105
VOL.76
【4-6】吉村健司:「SVCによる定態安定度向上対策
一解析プログラムの開発とモデル系統
に対する基礎的検討-」電力中央研究所報告、T88090,平成元年5月(1989.5).
【4-7]吉村健司、高崎昌洋:「SVCによる定態安定度向上対策
一長距離串形系統へのSVC
の導入指針-」電力中央研究所報告、T89049,平成2年4月(1990.4)
【4-8】岡本浩、栗田篤:「ロバスト安定度指定法に基づくSVCの電力動揺抑制制御系の設計
手法」電気学会論文誌B,117巻,4号(1997).
【4-9]FerdiArmanSyah,NaotoYorino,Hiroshisasaki,"PowerSystemOscillationDampingControl
byRobustSVCSupplementaryController,乃IEEJTransactionsonPowerandEnergy,Vol・120-B,
No.8/9(2000)
【4-10]QiangLu:"NonlinearControISystemsandPowerSystemDynamics,"KluwerAcademic
Publishers(2001).
【4-11]小西博雄、後藤益雄、横山明彦、QiangLu:「FACTS機器のリアルタイム解析げルの動作検
討」平成13年電気学会B部門大会119,(2001).
[4-12]小西博雄、後藤益雄、横山明彦、QiangLu:「ST灯COMによる非線形系統安定化
制御」平成14年電気学会全国大会6-206,(2002).
【4-13]小西博雄、後藤益雄、横山明彦、QiangLu:「SmTCOMによる非線形系統安定化制
御のシミュレータ試験」平成14年電気学会B部門大会117,(2002).
【4-14]世古口雅宏、小西博雄、後藤益雄、横山明彦、QiangLu:「非線形最適制御STATCOM
による系統安定化制御」平成14年電気学会電力技術・電力系統技術合同研究会
PE-02-109,(2002).
【4-15]M・Sekoguchi,H・Konish,M・Goto,A・Yokoyama,QiangLu:'NonlinearOptimalControI
AppliedtoSTATCOMforPowerSystemStabilization',IEEE〃ES
T&DConftrence2002:
AsiaPacific,(2002).
【4-16]A・Isidori:"NonlinearControISystems,"SecondEdition,Springer-Verlag,(1989).
【4-17】石島他:「非線形システム論」、計測自動制御学会編,(1993.5).
【4-18]I・Kamwa,R・Grondin,andY・Hebert:"Wide-areaMeasurementBasedStabilizingControlof
LargePowerSystems-ADecentralizednlierachicalApproachn,IEEETrans・OnPowersystems,
VOL・16,NO.1,PP.136-153(2001-2)
106
付録
4.7
4.7.1
発電機定数
付表4.1発電機定数
GeneratorGl
Xd【p.u.】
xd'「D.u.1
.xd"rD.u.1
Xqrロ.u.1
1.651
0.324
0.232
0.249
0.171
1.548
0.918
0.380
xo"rD.u.1
0.248
0.171
xlrD.u.1
0.204
0.102
TdO'rsl
5.140
5.900
TdO''rsl
0.0437
0.033
TqO'「sl
0.500
0.535
TqO"rsl
0.070
0.078
Drt).u.1
2.000
2.000
1207て
120冗
50.00
9.00
6000
2
CaDaCitvrGVAl
発電機
G2AVRブロック図
6.0
付図4.1
4.7.3
(1)
l.590
xq'rt).u.1
wO=27[打rad/sl
HrMW-Sec/MVAl
4.7.2
GeneratorG2
1.569
vb
4.5
AVRブロック図
線形化フィードバックと座標変換の求め方
線形化フィードバック
状態方程式(付4.1)式に対して、原点の座標近傍Uが存在して、U上で(付4.1)式
が可制御線形状態方程式(付4.2)式とフィードバック等価であるための必要十分条件は
次の2つの条件を満たす原点の近傍Ⅴが存在することである【州t4-17】。
1)(α範,α釘g,…,αダ Jg)(カが線形独立
2)(d鵜,dギg,…,dダ Jg)(カがインポリューティブ
(付4.1)
;ム・ハ′ト,?--・りJ
-ニュ上∴叫αわ
ズJ+ズ2+ズJズ2βc
」(U
107
:≡筐∂'諾責買'り】)
(付4.2)
2つのベクトル場/(カ,g(カのリー積は(付4.3)式で定義される新しいベクトル場で
(付4・3)
【/,辟)=空相)一旦g(ズ)
さらにリー積を繰り返し行うことにより定義される(付4・4)式で示すベクトル場叫′g
を用いる。
αdヌg(ズ)=g(ズ),吟1g(J)=レ,叫g](ズ)
(付4・4)
(付4.4)式によりベクトル場を計算すると、(付4.5)式および(付4.6)式となる。
(付4.5)
呵g(J)=g(J)=
叫g(J)=い埠申)
旦塑′(Jト塑g(ズ)
∂方
み
土管話
生㌘詰
り∵川㌣…
十川ハエ.…
聖_(Pm__△の)
]
=[:
完-Eごy∫Sin∂
卜βで「」ト
2ガ
9
ー空⊥g′γcos∂
2g
∫
0
△α〉
0
0
0
一聖坐抑cos∂一芸纂鵜sin∂
(付4.6)
一芸gニ㌔sin∂
(付4.5)式および(付4.6)式より全ての∂に対し新しいベクトル場は線形独立である。
各要素全ての組み合わせのリー積を計算すると、
拘ゎ埠小)=0
(付4.7)
拘制動車)=0
トdヌg,硬直=0
リー積が叫♂g叫ノgの線形結合で表されるので、このベクトル場はインポリューティブで
ある。
以上より(付4.1)式と(付4.2)式がフィードバック等価であることが確認できた。
108
(2)
座標変換
フィードバック等価の条件が満たされるとき、フロペニウスの定理によれば原点の座標
近傍V/とⅤ/上で、
(付4.8)
山dヌgゐ(ズ)=0
(付4.9)
エ1dd÷gゐ(ズ)≠0
を満たす関数カ(カが存在する。
(付4.8)式より、
山榊(ズ)=塑d鱒(ズ)
か
∂〟
∂∂
釘。0
「事一L
莞
ご(細・り〔サり
∂力(J)
)
γ∫ .Sl
n
∫U
(付4.10)
(付4.10)式が0になるためには、関数力伝ソが
塑=0
(付4.11)
∂の
を満たさなければならない。言い換えると∽の関数であってはならない。
次に(付4.9)式より
叫州=誓d榊
空聖)
∂の
=(塑
∂∂
(付4.12)
一竺竺E′γcos∂ト芸芸gニ仁Sin∂
一芸gこ仁Sin∂
(付4.12)式が0であってはならないから、
塑≠0
(付4.13)
∂∂
でなければならない。以上から(付4.8)と(付4.9)式を満たすカ(カを求めると、
カ(カ=』♂
(付4.14)
となる。また
り恒)=塑拍)
=(壁∂の
壁) 三聖(アm-_△の)
2g
戌)0
∂∂
△の
=
△の
(付4.15)
従ってシステムを線形化する座標変換のひとつは
109
◎(J)=
[JJしT)
エ1力(ズ)
(付4.16)
=[三三]
(3)線形化フィードバック
y
α(ズ)
β(ズ)β(ズ)
ぢん(ズ)
エgちゐ(ズ)
エgちゐ(ズ)
1,′
(付4.17)
α(ズ)=エをゐ(ズ)
/Jしr)
=エ′
∂ズ
=い三:三
=エ′△の
詮(P:三三△の
筈)
=(卓仝竺
∂の
(付4.18)
豊(P∽--A〟)
也)0
β(ズ)=エgち九(ズ)
=エg〈筈拍))
=上g(芸
dノ0
△の
=エg△〟
■j生g′ysin∂
箸)
=(慧
2〃`J、
0
(付4.19)
-J、
_上型_g′γsin∂
2〃
110
第5章
系統解析用コンバインドサイクルモデルの開発
はじめに
5.1
現在電源として高効率の面からACC(改良型コンバインドサイクル発電プラント)が
注目され更に効率向上を目指し開発が進められている【5
1】。一方、海外において系統周波
数の大幅な低下を原因としてガスタービン発電機が連鎖トリップし大規模停電に至った事
故が報告されている【5{2】【5【川。
このような背景から、系統周波数変動時のガスタービンプラントの応動解析の必要性が
生じており、このためのモデリング開発ニーズが高まっている。
周波数変動時の発電機の応動解析には一般火力機ではボイラー及びその制御系を含むプ
ラントのモデリングにより解析を行っている。一方、ACCでは出力急変時の燃焼系の安
定性の確保が注目されており、燃焼や燃焼の制御系も含めたガスタービンの動特性を模擬
する必要がある【5-121。
今後、系統の周波数制御能力を確保する観点から、コンバインドサイクルプラントに対
してもガバナフリー運転や負荷周波数制御(LFC:LoadFrequencyControl)を実施する要
求がある。しかしコンバインドサイクルでは、系統擾乱を受けると、排ガス温度上昇によ
るトt」ップや負荷急増に伴う過大な燃料投入による失火などを避けるため、制御系におい
て指令値の急変を制限するような対策を行っている【5・13】。
コンバインドサイクルプラントのガスタービン・蒸気タービンの動特性を模擬した専用
モデルの例は文献に見える【5-71。
しかし、速度・負荷制御、排気温度制御や空気流量制御
を詳細に模擬したモデルはない。周波数変動時のプラント運転の安定性を検討し、制御系
の最適化を実現する上で、プラント本体の他に燃料流量や空気流量制御系を詳細に模擬す
ることが必須である。このような観点から、開発したモデルは、実機プラントの制御ブロ
ックのうち起動・停止を除いた定常運転時に対応する制御ブロックを詳細に模擬するもの
である。
本章では従来のモデルでは考慮していない低出力嶺域から定格出力領域までの広い範囲
に対応できるACCの動特性モデルについて述べるとともに、多軸型ACCに対応するモ
デル化の考え方についても言及している。更に開発したモデルによる応動特性シミュレー
ションと実機試験のそれぞれの結果との比較評価について述べる。
5.2
背景
1996年にマレーシアで周波数低下による大規模停電が発生した。最初に92万kW
の電源脱落により,1.OHz程度周波数が低下した。これを引き金にコンバインドサイク
ル発電機が制御不良で連鎖的にトリップし、さらに周波数が低下し、他の電源が連鎖的に
脱落して大停電に至った【5・2】。
111
火力発電所では、タービン動翼の共振がもっとも過酷であり,共振は周波数低下および
上昇のいずれの場合においても発生する恐れがあり、したがって、連続運転可能な周波数
の範囲はこれによって決まっている。特に低圧タービン最終段用の長翼は、機種によって
は1mを越える長さがあり、タービン軸の回転の接線方向一次振動、軸方向一次振動,軸
方向二次振動などの固有振動数を有する。しかし、この固有振動数、すなわち共振点がタ
ービンの定格回転数ないしはその整数倍から十分に離れておれば、負荷急変などに伴い発
生するタービンの軸振動応力は増大することなく、すぐ減衰する。このような共振による
振動応力と,既知の動翼材の疲労強度データ、すなわち、動翼の強さから動翼の許容共振
振動回数が計算できるため、運転可能時間も求めることができる。このようにして得た運
転可能時間を、横軸:周波数、縦軸:許容時間としてプロットしたものが運転可能時間曲
線である。
運転可能時間曲線の一例を図5.1に示す。図から定格周波数(図では60Hz)近辺
では連続運転可能であり、許容限界より外では運転可能時間が急速に短くなることがわか
る。以上の理由で周波数低下時には、機器保護トリップする。図5.2に示すように周波
数が約2Hz以上低下すると大規模停電の危険性がある【5・13】。
図5.1
運転可能時間曲線
112
ーマレーシアでの停電事故一
日
時:柑96息3
供給支障:576万kW(全停電)
原
因:①母線事故による電線脱落-②周波数低下による
連鎖的電源脱落
周波数が維持きれなければ,発電楔の連銀トリップに
よる系統崩壊の可能性あり
火炎旗失(ミスファイヤ):燃料の絞月込みにより,燃焼器
の火が消える現象
図5.2
マレーシアでの停電事故の状況
113
5.3
コンバインドサイクルプラントの概要
多軸型コンバインドプラント
5.3.1
姫路第一火力発電所第6号機の主要仕様を表5.1に示すr5-1】。最新型の1,300℃
扱高温ガスタービンと高圧,中庄,低圧の圧力の異なる三つのドラムを持つ再熱三重圧
型排熱回収ポイラ,および再熱式混圧蒸気タービンで構成する。ガスタービン,排熱回
収ボイラ3台,および蒸気タービン1台を組み合わせた多軸型システムで構成されてい
る。
プラント出力は670MWで、この内ガスタービン系3ユニットの出力は154.3
MWX3である。プラント効率は、100%負荷で約50%の効率となっている。蒸気
条件は高圧タービンで14.6MPa、538℃である。蒸気条件は経済性評価によって
選定されるが,一般に多軸型コンバインドプラントでは蒸気タービンの大容量化に伴っ
て蒸気圧力を高く選定することができ,蒸気温度は高温ガスタービンの採用によって汽
力と同等の条件が可能となった。
プラント運用性では,起動時間は一軸型が多軸型より短いが,負荷変化率では同等で
ある。運用負荷帯は,ガスタービン空気圧縮機入口案内翼の絞り運用の採用によって多
軸型が有利となっているが,プラント最低負荷は,一軸型が軸数の切替運用によって有
利である。また,多軸型プラント特有の運用として,複数台のガスタービンや排熱回収
ボイラを運転機に対して追加,切り離しを行う台数切替運用を可能としている。多軸型
システム構成(姫路第一第6号機)を図5.3に示す。
5.3.2
一軸型コンバインドプラント
代表的プラントである川越火力発電所第3号系列の主要仕様も表5.1に列記してお
く。最新型の1,300℃扱高温ガスタービンと高圧,中庄,低圧の圧力の異なる三つ
のドラムを持つ再熱三重圧型排熱回収ポイラ、および再熱式混圧蒸気タービンで構成さ
れている。ガスタービン、排熱回収ボイラおよび蒸気タービンを1ユニットおのおの1
台を組み合わせた一軸型システムを独立7ユニットで構成されている。
プラント出力は1,650MW(一軸当たり243MW)とガスタービンの高温大容
量化に伴って大型化の傾向が見られる。一軸型システム構成例を図5.4に示す。
114
表5.1
コンバインドプラント主要仕様
し3000C級高温ガスタービンと再熟三重圧サイクルを組み合わせた多軸型およぴ一軸型のアドバンストコンバインド発電プラントの主要仕
様を示す。プラント効率は,計画値で48・5%以上(高位発熱量基準)となっている。
項
プラ
ント
ガス
ター
ビン
蒸気
ター
ビン
排熱回
収ポイ
フ
運用性
目
姫路第一6号横
プラント定格出力/軸認可出力
プラント計画効率
川越火力3号系列、
670MW=/-
l′650MW*ソ243MW*3
48.55%事I
48.5%■2
開放単純サイクルー軸式/MS700げA(I,288。C)
ほ8MW♯3(151MW■2)×7台
燃焼器
開放単純サイクル一朝式/MS700IFA([,274.C)
154.3MW*4(川0.3MW*l)×,3台
乾式低NOx燃焼器
型式/型名
出力×台数
入口圧力/入口温度
(高・中・低圧)
くし形衝動4涜排気式再熟混庄復水型/TC4ト30
250.1MW■4(249.tMW*l)×l台
14.6・4.3l・0.49MPa/538・538・2500C*1
型式/型名(燃焼温度)
出力×台数
型式/台数
蒸発量(高・中・低圧)
脱硝装置/脱硝装置出口NOx濃度
起動時問(ホット起動時)
負荷変化率
運用負荷帯
プラント最低負荷
営
業
運
転
開
始
排熱回収三重庄自然循環型/3台
17t.8・25.9・3l.Ot/h■1
乾式アンモニア接触還元法/9.7ppm
(16%02換算値)
100分
乾式低NOx燃焼器
くし形衝動2流排気式再熟混圧復水型/TCDF-26
く84.72MW■2〉×7台
10.0・2.16・0.29MPa/538・538・2500C*2
85MW*3
排熱回収三重庄自然循環型/7台
暮79.5・28.6・27.5t/h♯2
乾式アンモニア接触還元法/6ppm
(I6%02換算値)
5%/min(ガスタービン3台時)
45∼100%負荷(ガスタービン3台時)
20%負荷(ガスタービンl台時)*5
70分(ガスタービン点火∼全負荷)
5%/min
60∼川0%負荷(ほ由当たり)
9%負荷*5
1996年5月
1996年6月(3一博由).同年8月(3-2, 3軸).
同年Il月(3-4,5軸),同年t2月(3-6,7軸)
注:*L大気温度22Bc時,*2大気温度150C吼・*3大気温度50C時,*4大気温度40c時.*5プラント定格出力に対する割合
図5.3
多軸型コンバインドサイクルプラントシステムの構成
115
図5.4
5.4
一軸型コンバインドサイクルプラントシステムの構成
コンバインドサイクルプラントのモデル化
5.4.1
モデル化の範囲と特長
ACCが電力系統の周波数大幅変動時にどのような挙動を示すかを数値シミュレーシ
ョンにより評価するには、燃料流量、圧縮機空気流量、排ガス温度の伝達関数を数%以内
の精度で正確に模擬できる必要がある。従来のモデルでは実機の特性を必ずしも正確に模
擬できなかった。その主な理由はタービン翼冷却用空気を無視していたことにある。ガス
タービンではタービン実の冷却に圧縮機の空気が十数%使用されており、これがガスター
ビンでの損失の大半を占めている。
特に軽負荷時には燃焼ガスとタービン翼の摩擦によるロスのため冷却用空気流量の比
率が増大し、タービン入口圧力が低下してタービン効率が低下する。このような冷却用空
気流量の比率やタービン効率の非線形特性を考慮しないと、ガスタービン出力や排ガス温
度を正確に模擬することができない。従来のモデルでは冷却用空気流量やタービン効率の
非線形性は考慮されていなかった。今回開発したモデルはブロック図で表現しているので、
これらの非線形特性を容易に入力することができる[描[5,4】。
(1)
ガスタービン本体
ガスタービンは圧縮機、燃焼器、タービンから構成されている。大気より空気を吸入し、
圧縮機で空気を圧縮し、燃焼器で空気と燃料を混合して燃焼させ、得られた高温高圧の燃
焼ガスをタービンで膨張させ、排気ガスのエネルギーを排熱回収ボイラで回収する。
116
(2)排熱回収ボイラ
最新型の1300℃級ガスタービン用再熱三重圧排熱回収ボイラが模擬可能な構成とし
た。排熱回収ボイラでの回収エネルギーはヒートバランスから求める。ボイラから蒸気に
与えられるエネルギーをガスタービンの排ガス温度、排ガス流量から計算している。
(3)蒸気タービン
多軸型コンバインドサイクルでは高圧タービン、中庄タービン、低圧タービン及び再熱
器をモデル化した。一軸型コンバインドサイクル(図5.5)ではモデル化対象プラントに
おいて蒸気タービンガバナはないが、多軸型(図5.6)では蒸気タービンガバナが存在す
る。
低圧給水ポンプ
図5.5
図5.6
モデル化の範囲(一軸型プラント)
モデル化の範囲(多軸型プラント)
117
5.4.2
モデル化の考え方
最近国内において電力系統の動特性解析に適したコンバインドモデルに関する論文
[5-5]が発表されている。海外の論文【5-6】【5-7】においてもモデルの開発に有用なコンバイ
ンドプラントの基本的な動特性がブロック図にて示されているが、実プラント各部の諸
量を具体的に表現するという視点からは改良の余地がある。特に系統周波数変動時の応
動を評価するためには排ガス温度、燃料流量や空気流量の動特性を高い精度で模擬でき
る必要がある。
そこでプラ.ント内の熱力学的な関係をブロック図で表現しかつ実機の動特性を模擬
できる動特性モデルの開発を進めた。モデル作成にあたっては機器定格、各種設計デー
タを入力データとしモデル定数を設定するようにした。また計算結果の確認を容易にす
るため、出力データもヒートバランスデータ等の設計データと対応するよう留意してい
る。例えばタービン冷却用空気流量やタービン効率のデータがない場合、ヒートバラン
スから特性を自動的に計算し結果を非線形グラフにて表示するようにした。
(1)
ガスタービン本体
ガスタービンサイクルは内部損失、圧力損失がなければ理想的ガスタービンのプレイ
トンサイクルとなる。内部損失、圧力損失を考慮したガスタービンの基本サイクルは図
5.7に示すようになる。ガスタービンサイクルは以下の圧縮→燃焼→膨張→放熱から
形成される【5-3‖5・8】。
すなわち、
(1)圧縮機による大気の断熱圧縮(軌跡1→2)
(2)燃焼器にて圧縮された空気を等圧加熱(軌跡2→3)
(3)タービン部にて断熱膨張してタービンを駆動(軌跡3→4)
(4)排気ガスを等圧放熱(軌跡4→1)
ガスタービンモデルブロックの全体構成を図5.8に示す。ガスタービン発生動力は
タービン部での温度降下分とガスタービン部平均定圧比熱の積であるエンタルピー変
化に燃焼ガス流量を乗じて得られる。ただし圧縮された空気のうち十数%はタービンの
冷却に使用されるので仕事をする燃焼ガス流量が圧縮機出口空気流量に比べて減少す
ることを考慮する。
温度(O K)
エント批㌧(S)(kJ/kgO
図5.7
K)
ガスタービンの基本サイクル
118
図5.8
ガスタービンモデルの全体構成
一方圧縮機損失は圧縮機での温度上昇分と圧縮機部平均定圧比熱との積であるエンタル
ピー変化分に空気流量を乗じて計算できる。軸出力はガスタービン発生動力から圧縮機損
失を差し引いたものである。ローター回転数がタービントルク、圧縮機空気流量、排ガス
温度に影響するのでこれらも考慮している。以下では図5.9に示した変数を用いて特性式
を表現する。変数、定数の説明は付録に記した【5・8】。
燃料肝
ちち/ィ
冷却用空気
ろ′ろ′/′
〝
図5.9
ガスタービンモデルの構成
119
①燃焼器での等圧加熱
燃焼器での温度上昇をより正確に求めるため、燃焼ガスの定圧比熱が燃焼器入口温度に
より変化するものとした。
燃焼はほぼ定圧変化として、燃料の発熱量と燃焼ガスエンタルピー上昇から燃焼器での温
度上昇』rを求めると
(5・1)
』7=′・J・ク。/ちm
fは燃料流量と空気流量の比(燃空比)と呼び、タービン材料の使用限度である1300℃程
度に燃焼室出口温度を抑えるため、最高0.02程度である。Lは燃料の低位発熱量(kcal/kg)、
クbは燃焼効率、Gmは燃焼がスの平均温度での定圧比熱である。燃焼器の出口温度T3ははぼ
一定に保たれるので、入口温度ろにより燃焼ガス平均温度が変化する。
燃焼器入口温度ろにおける比熱を定格出力時の入口温度ろ8と出口温度ろ0における比熱
から内挿補間により求め、燃焼ガスの平均温度(ろ+ろ0)パに対応する比熱を平均比熱Gm
とする。(5・1)式でん℃mをろの関数とすると(5・2)式となる0(5・2)式は入口
温度ろが上昇すると燃焼がスの平均比熱が上昇して燃焼器での温度上昇幅が小さくなる特
性を表す。
』r=席巧ノイ
(5.2)
(席昭=(4-ちろ)・クb・β
4.ちは平均比熱の逆数をろから求めるための係数である。
図5.10(a)は燃焼ガス温度と定圧比熱の関係を示す。図5.10(b)は代表的燃料で燃
焼した場合の燃空比/と温度上昇』rの関係を示している。燃空比が一定の場合燃焼器入
口の温度が高いはど燃焼器での温度上昇が低いことがわかる。
温度上
昇△√
ち
丁20
丁30
燃焼ガス温度(O
燃空比
f
K)
(a)燃焼がス温度と定圧比熱
図5.10
(b)燃空比と温度上昇
燃焼器での温度上昇
120
②タービン冷却用空気流量
高温ガスタービンではタービン翼を圧縮機から吐出された空気により冷却している。文
掛5・7】に示されているモデルではこの冷却用空気が考慮されていないため、ガスタービン出
力が30%程度多く出てしまうという問題点があった。また圧縮機部とタービン部の平均
温度を同一として代表比熱を設定しているため、各部の温度も正確には計算できなかった。
そこで圧縮機部とタービン部を明確に区別してモデル化した。さらにヒートバランスから
ガスタービン出力に対する冷却用空気流量を計算した。この冷却用空気流量特性は非線形
グラフで入力できるようにしてあるので、実機の特性データが入手できればそれを入力す
ることも可能である。
図5・9で圧縮機で圧縮された高圧空気が断熱膨張し、タービン翼との摩擦により熱を奪
って加温された空気を排熱回収ボイラに排出すると考える。タービン内での断熱膨張後の
圧縮空気温度をち,とすると
ぢ=爛ヲ
(5・3)
一方タービン翼と燃焼ガスとの摩擦熱等により冷却用空気が加温されるとすると、以下
のエネルギー方程式が得られる0ここで∫は冷却用空気流量比率、ク〟は空気冷却効率と定
義した。ク′はタービン効率、範はcaトJ換算係数である。
(5.4)
goり▲Cpc(ち-ぢ)肝=goらTち(1-1/g・)(1一扉(隼+Ⅳ(1-F))
上式の左辺は冷却用空気がタービン内で得たエネルギー(エンタルピー変化分と冷却用空
気流量の積)を表す。右辺は燃焼ガスの持つエネルギーのうちタービン翼との摩擦熱等に
より失われたエネルギー(等エントロピー圧縮仕事(付5.9式)と現実の膨張仕事の差)を
表す。
(5.4)式より冷却用空気流量比率Fは(5.5)式で計算できる。
ち(1-1/g.)(隼+Ⅳ)(1-りr)Cpr
(5.5)
【り」Cpc(㌔-ぢ)+CpTち(1-1/gl)(1一ワr)]Ⅳ
ダが変化すると燃焼器出口温度ろが変化するため収束計算が必要になる。タービン効率
クrと冷却用空気流量比率ダを求める具体的手順を図5.11に示す。
ガスタービン出力に対する冷却用空気流量の計算結果例を図5.12(a)に示す。タービン
効率の計算結果例を図5・12(b)に示す0空気冷却効率ク」は100%と仮定した。
121
図5.11
タービン効率、冷却用空気流量比率の補正演算
122
打りJ指令一冷却用空気流量特性
摘
10%
20%
30%
40%
50%
帥%
F■空気流量町
70%
8摘
90%
100%
出力指令
出力指令(%)
(a)冷却用空気流量
タイン入口圧力一夕イン効率特性
タービン効率
6
5
dT
7
8
9
10タイン黒。圧力Ⅰ2Ⅰ3
Ⅰ4
15
16
ター['ン入口圧力(kgf/cm2)
(b)タービン効率
図5.12
特性計算例
123
③燃空比の評価
最新型の実機では低NOx燃焼器を採用しており、二段燃焼方式等の燃焼方式を採用して
いる。ただしプラントにより燃料や空気流量の調整機構が異なっているため、本モデルで
は燃焼器内の燃空比調整機構の詳細までは模擬していない。安定燃焼範囲の簡易評価のた
め燃空比変化幅を検出し、閥値』f以内であれば安定燃焼可と判定することができる。以
上の関係を考慮したガスタービンブロック図を図5.13に示す。太枠で示すブロックが新
規に追加したブロックである。
ロータ回転数偏差
』.Ⅳ
図5.13
(2)
ガスタービンモデル動特性ブロック図
制御系
ACC(改良型コンバインドサイクル発電プラント)モデルの主要制御系の概略
を図5.14に示す。
①速度・負荷制御
ロードリミット運転モードとガバナフリー運転モードを切替可能とした。出力指令に発
電機出力が一致するよう負荷設定が調整され燃料投入量を制御する。ロードリミット運転
124
の場合はガバナ制御信号としてタービン回転数偏差にバイアスを加えて回転数高側の変
動に対して不感帯を設ける。ガバナフリー運転の場合はバイアスを加えないためタービン
回転数に対する不感帯はない。
②排気温度制御
排ガス温度が目標値になるように燃料流量を制御する。
③空気流量制御
燃焼温度は燃料と空気の比率で決まることから、燃料流量が変化しても排ガス温度が目
標値になるよう空気流量を制御する。空気流量は圧縮機入口案内翼(IGV:InletGuideVane)
で調整されるが、この案内巽は燃料調節弁に比べ応答が遅い。
図5.14
5.5
ガスタービン主要制御系概略
数値シミュレーションによるモデルの検討
5.5.1
プラントモデル静特性
電力系統の周波数が大幅に変動しACCの出力が急激に変動した場合、以下の要因でプ
ラントがトリップに至る可能性がある。
・燃料流量と空気流量の比率(燃空比カの大幅変動による燃焼器での失火
・排ガス温度の大幅上昇による制御、保護動作
従ってプラント応勤評価のためには出力指令に対し燃空比と排気ガス温度の応答特性
が正確に模擬できることが必要である。ガスタービン出力指令に対するガスタービン出力
及び排ガス温度の計算結果例を図5.15に示す。従来モデルでは実機より出力が30%程
125
度大きく、排ガス温度も最大で20℃程度低い。
出力指令一ガスタイン出力特使
GT闘岬
出力指令(%)
(a)ガスタービン出力
出力指令▼カースタイン出力特性
38%
40%
5肪
60%
70%
銅鴬
90鴛
川路
出力指令(%)
(b)排ガス温度
図5.15
出力特性計算例(大気温度4℃)
モデルの妥当性を評価するため、出力指令に対する燃空比、排ガス温度データを開発し
たモデルと実機計画値の整合性の観点から評価した。ガスタービンの出力指令値を30%か
ら100ほで変化させた時、プラントモデルが整定状態となる燃料流量、空気流量、排ガス
温度を時間軸数値シミュレーションにより求めた。
図5.16(a)は出力指令に対する燃料流量変化を表わしており、系統解析用モデルの結
果と実機計画値との偏差は1.9%以下である。図5.16(b)は出力指令に対する空気流量変
126
化を表わしており計画値との偏差は1.4%以内である。図5.17(a)に示すように出力指令
に対する燃空比変化の計画値との偏差は2.3%以内である。
図5.17(b)は出力指令に対する排ガス温度の変化を表わしており、系統解析用モデル
の結果と実機計画値との偏差は1.1%以下である。
出力指令一燃料流量特性
3げ%
4㈹
50%
60%
70%
80%
90%
100%
出力指令
出力指令(%)
(a)燃料流量特性
出力指令一がスターヒ■ン出力特性
450
430
410
390
空気流量
370
(kg/s)
350
330
310
290
270
250
30%
40%
50%
60%
70%
80%
90%
出力指令(%)
(b)空気流量特性
図5.16
プラントモデル静特性シミュレーション結果(大気温度4℃)
127
100%
出力指令一燃空比特性
30%
40%
50%
60%
7㈹
80%
90%
川0%
出力指令
出力指令(%)
(a)出力指令一燃空比特性
出力指令一排がス温度特性
620
615
6】0
605
排がス
600
温度
595
(Oc)
590
585
580
575
570
30%
40%
50%
60%
70%
出力指令
80%
90%
出力指令(%)
(b)出力指令一排がス温度特性
図5.17
プラントモデル静特性シミュレーション結果(大気温度4℃)
128
100%
5.5.2
(1)
プラントモデル動特性
周波数変動時の応動
周波数変動時の燃空比、排ガス温度の動特性を評価する
ため、本研究にて開発した系統解析用モデルと既にプラント本体設計部門にて開発済み
の詳細模擬モデルによる時間軸数値シミュレーション結果との比較を行なった。
①評価方法
プラント出力を35%、速度・負荷制御をガバナフリー運転とした。図5.14で
タービン回転数偏差模擬入力としてステップ的に変化する信号を与えた。信号の変化
速度は-0.16Hz/秒とし、-0.24Hzに低下したら一定値となるとした。燃
空比については燃焼器の安定燃焼の評価のために、変動幅として、初期値からの偏差
を%で表わして評価した。排ガス温度については、保護系の動作評価のため変動値を
摂氏温度で表わした。
②評価結果
タービン回転数偏差のステップ的な変化に対する、燃空比の変動状況を図5.18
(a)、排ガス温度の変動状況を図5.18(b)に示す。燃空比変動幅の最大値は系統解
析用モデルでは9.7%、詳細モデルでは8.9%である。系統解析用モデルのほうが
応動はやや遅いが、変動幅はほぼ一致している。
排ガス温度変化幅の最大値は系統解析用モデルでは20.1℃、詳細モデルでは
20.6℃である。系統解析用モデルと詳細模擬モデルの周波数変動直後の応動はは
ぼ一致しており(燃空比変化幅で0.8%、排ガス温度変化幅で0.5℃の偏差)安定
運転の簡易評価が可能である見通しが得られた。
燃空比変動幅
10
8
(辞)
6
璧裔削岩即華
4
2
2
n′」
時刻(秒)
(a)燃空比変動幅
扶力■ス温度の変化
髄要ぺ.五串
209
211
213
215
217
時刻(秒)
(b)排ガス温度の変化
図5.18
プラントモデル動特性シミュレーション結果
129
(大気温度22℃)
(2)
負荷遮断試験
モデルの動特性を評価するため、実機における100%負荷遮断試験との比較を行な
った。対象として3台のガスタービンと1台の蒸気タービンから構成される多軸型AC
Cを選定した。図5.19はガスタービンー軸分の実機での100%負荷遮断試験デー
タを示す。開発したガスタービンモデルに発電機を慣性定数で表わしたモデルを結合し
て、負荷遮断の時間軸数値シミュレーションを行なった結果を図5.20に示す。
(ヨタービン回転数
実機では遮断後約1秒でタービン回転数は最大3724rpmまで上昇しており、約13秒
で定格回転数に回復している。実機とモデルの回転数変動ははぼ一致している。
②発電機出力
実機とモデルとも負荷遮断後発電機出力は定格154MWからOMl‖こ急速に低下している。
図5.19
実機負荷遮断試験データ(大気温度4℃)
130
整定
遮断
110
120
図5.20
130
140
150秒
時間(秒)
モデル負荷遮断シミュレーション結果
(3)排ガス温度
空気流量制御の遅れのため遮断直後は燃料流量に比べて空気流量が過剰になり、排ガス
温度は一時的に低下する。遮断後約28秒で空気流量調節機構の開度は設定値に達するの
で排ガス温度も上昇し一定値に落ち着いている。実機とモデルの結果ははぼ一致している。
タービン冷却用空気流量やタービン効率を一定とすると、図5.20の破線で示すように排
ガス温度が30秒後330℃程度までしか回復していない。
(4)
IGV開度
空気圧縮機入口に設置された入口案内翼の開度は遮断後、初期値84degからゆっくりと
約28秒かかって43degに到達している。実機とモデルの応動はほぼ一致している。
(5)
燃料制御指令
燃料制御指令は負荷遮断後瞬時に88FFD(FFD:FuelFlow
Demand)から最小燃
料流量に相当する指令値12.5FFDまで絞られている。実機ではタービン回転数が定格
値3600rpmに戻ると燃料制御指令は25FFDに回復している。系統解析用モデル
では燃料流量制御弁や圧力制御弁等を模擬していないため遮断直後の燃料制御指令値、排
ガス温度変化に若干差異が見られる。
131
5.6
ハイプt」ッド系統シミュレータによる動特性試験
モデルの動特性を評価するため、実機における100%負荷遮断試験とシミュレータで
の結果の比較を行なった。対象として3台のガスタービンと1台の蒸気タービンから構成
される多軸型コンバインドサイクルプラントを選定した。図5.21に示すように開発した
ガスタービンモデルを発電機及び交流系統を模擬したハイブリッドシミュレータに結合し
て試験を行なった。コンバインドサイクルプラントは増設部に組み込み既設部と信号を取
り合う方式としている。
増設部
既設部
ディシ◆タル演算部
図5.21
5.6.1
アナログ部
シミュレータ試験回路構成
ハイブリッドシミュレータ発電機モデルの構成
ハイブリッドシミュレータAPSA[1-7]の発電機モデルは諸定数などは自由に選定で
き、励磁系、調速系、タービン系はマイクロコンピュータで多種の特性に対応可能となっ
ているが、プラントモデルは模擬対象としていない。
5.6.2
プラント演算装置による模擬
現状モデル装置の改造を最小限にしてプラントモデルを模擬することを考え、新しく模
擬するプラントモデルの演算は既設発電機モデルで行わない。プラント演算装置でプラン
ト部とガバナ部を演算し、既設発電機モデルと結合する方式を採用する。従って既設発電
機モデルではこのプラント演算装置とのインターフェス部のみの改造となる。このような
方法を採用することにより、プラント部を共通部として複数台の発電機で構成する多軸型
コンバインドサイクルを実機と同じ構成で模擬可能としモデリングを容易なものとしてい
る。また、インターフェース信号も少なくなるので既設モデルの改造を極小にする利点も
ある。
132
多軸型コンハ♪インドサイクルの模擬方法
5.6.3
ガスタービン3軸、蒸気タービン1軸で構成する多軸型コンバインドサイクルの模擬方
法の例を図5・22に示す0この例では多軸型コンバインドサイクルをプラント演算装置4
台を用いて多軸型コンバインドサイクル本体および制御系を詳細に模擬しているので、
各々独立して運転することができる0
3台のガスタービンの排熱はそれぞれ排熱回収ボイ
ラにて蒸気として熱エネルギーを回収し、蒸気タービンを駆動して運転する。各プラント
演算装置と発電機モデル間の信号はAI/0で送受信する。
=‥==:■ヽ
:プラントミ富 壮置1
カストヒン1軸出力
がスタービン制御1
======■■…‥-■--●■■一■■●-■-●■■--■■■■■--●-==t●■■●t■■t■■t■■■■
■:▲.二,..二::
ニフラント演算装置2
フ
電機1出力
>0→
>0づ
………芳一祁ごr■ジ■2■軸訂力■`■■■
がストビン制御2
ノ
ラント演算装置3
発 電機3出力
がスタービン3軸出力
〉G
→
排ガス
+ナー`斗l
頭
l
排ガス
廃熱回収
ロ
ガス
廃熱回収
ボイラ2
蒸気
図5.22
電機2出力
ボイラ1
蒸気トビン軸出力
蒸気
」
蒸気
l
ヨタービン
l
電機4出力
・0ご
プラント演算装置による模擬方法
図5・19は大気温度4℃の場合の実機での100%負荷遮断試験データのうちガスタ
ービンー軸分を示す。シミュレータ試験での負荷遮断試験結果を図5.23に示す。負荷遮
断後、速度・負荷制御の負荷設定は無負荷定格速度相当としている。
(1)タービン回転数
遮断後約1秒でタービン回転数は最大3720rpmまで上昇しており、約17秒で定
格回転数に回復している。実機とモデルの変動状況ははぼ一致している。
(2)発電機出力
実機とモデルとも負荷遮断後発電機出力は定格154MWからOMWに瞬時に低下して
いる。
(3)排ガス温度
空気流量制御の遅れのため遮断直後は燃料流量に比べて空気流量が過剰になり、排ガス
温度は一時的に低下する。遮断後約28秒で空気流量調節機構の開度は設定値に達するの
で排ガス温度も上昇し一定値に落ち着いている。実機とモデルの傾向ははぼ一致している。
133
(4)IGV開度
空気圧縮機入口に設置された入口案内翼の開度は遮断後、初期値からゆっくりと約28
秒かかって下限値に到達している。実機とモデルの応動時間は一致している。
(5)燃料制御指令
燃料制御指令は負荷遮断後瞬時に87FFD(FFD:FuelFlow
量に相当する指令値12.5
Demand)から最小燃料流
FFDまで絞られている。タービン回転数が定格値3600
FFDに回復している。実機とモデルの傾向はほ
rpmに戻ると燃料制御指令は39.5
ぼ一致している。
ニ†予十
与≡売手≡㌢言1…:
・三=コす饗rr千丁ニ㌻罠
二わl曇1●■
;て;:●●:
■●■.::■●■●■■
ト■■-■l】.■▲●■■
至モ喜モ…垂≡
l_..:●:三1さ!::!:
▲岩
.._..._..J.■.l
::.:●::l:!:'∴=.!
巨■■
;-■
串≡…草葉宣…
丁℃
虞u■二三5暮
!:・=つ
■■■■■
::_::..1:.‡■.!
ミニ::;;三;に;;=;
■--●●t-●■■い■:
-■
:・立道生薬司
l;●
-≡;
:;て;;::・;:ヽ;;
i!■
・!::;;:・‥・・-●:l亡!・
=斗
■
--▼■;一:・-■‥::・
⊆;-::::I!!:!
■■--::-■-
‖
._..■‥::;●l
ヨ
据猫:
■
・iモ._....
■ヲモモ:::二三三■:こご▲
■
■l.:
●
...'.1:
■
.
l一・
旛緬
三■:三;.1…童苧至至
;l
rTT=T「てTrてT≡.-.
l.
一一
■■●●●
■l
__
q
;;
当
.-●ト
霞■
∵㌧!・t下・;
l■●
こ・;:‥・‥・・・・l‥・…・:・il;
ー●..
ト亡'
.1i=.ざ.=三::l=
:サ;.・‡`ア:
l.
●・・■:
図5.23
n
;萱■三;…:ド≡:さ
.--l
l■.≡
負荷遮断シミュレータ試験結果
134
.'.:
-:!
●l●
:コ
5.7
結言
電力系統動特性解析用のACC(改良型コンバインドサイクル発電プラント)モ
デルを開発し、静特性及び動特性に関し開発モデルと実機計画値、プラント本体設計部
門での詳細モデルによる模擬結果との比較評価結果を述べた。
(1)開発したモデルにて静特性、動特性とも必要な精度が得られることが確認できた。
このシミュレーションモデルで安定燃焼の評価ができる可能性を確認した。
軽負荷時には燃焼ガスとタービン翼の摩擦によるロスのため冷却用空気流量の比率
が増大し、タービン入口圧力が低下してタービン効率が低下する。このような冷却用空
気流量の比率やタービン効率の非線形特性を考慮しないと、ガスタービン出力や排ガス
温度を正確に模擬することができない。従来のモデルでは冷却用空気流量やタービン効
率の非線形性は無視されていた。
(2)従来のモデルでは実プラント各部の諸量を具体的に表現するという視点からは改良
の余地がある。周波数制御時のプラント運転の安定性を検討し、制御系の最適化を実
現するためには燃料流量、空気流量および排気温度制御系を詳細に模擬する必要があ
る。従来のモデルは制御系を簡略的に模擬していた。このような観点から開発したモ
デルは実機プラントの制御ブロックのうち起動・停止を除いた定常運転時に動作する
制御ブロックを詳細に模擬している。
(3)開発したプラントモデルは大容量プラントをモデルとした大規模なもので、(DSP)
上にソフトウェアとして模擬している。このDSPで構成されたディジタルシミュレー
タをシミュレータAPSAと接続してハイブリッドタイプのシミュレータを構成する
ようにしている。今回開発したモデルにより系統事故発生時のACCの応動を詳細に
検討することができる。
(4)ACCは燃料流量制御の応答は速いが空気流量制御の応答は遅いため、排ガス温度、
燃空比の評価が必要である。
(5)プラント内の熱力学的な関係をブロック図で表現しかつ実機の動特性を模擬できる
動特性モデルを開発した。動特性モデルおよび制御系はすべてブロック図で表現してい
るので、容易に作成、修正ができ非線形な特性も入力できる。
(6)このモデルは分散電源として普及しているガスタービンプラントにも応用すること
ができる。
(7)ガスタービンの起動、停止等を含んだ系全体の詳細な挙動解析を行なうには更に精
密なモデルの開発が必要である。今後系統周波数の変動に対するACCの応動特性に
ついて評価していく予定であるが、プラント挙動の解析には更に精密なモデルの開発
が必要であり今後検討を進めていく。
135
参考文献
5.8
【5-1】川内章弘、武蔵貢、広瀬文之:「アドバンストコンバインド発電プラント」目立評
論
Vbl.79NO.3(1997-3)、平成9年(1997)
[5-2】電気協同研究、第55巻、第3号:「電力品質に関する動向と将来唇望」、電気協同研
究会、平成12年1月(2000)
サイクル
【5-3】須崎志郎、河田謙一、世古口雅宏、後藤益雄:「系統解析用コンバインド
発電プラントモデルの開発」、電気学会全国大会、NO.1407、平成11年(1999)
【5-4】須崎志郎、河田謙一、世古口雅宏、後藤益雄:「系統解析用コンバインドサイクル発
電プラントモデルの開発」
電学論B,120巻
8/9号,平成12年(2000)
【5-5】井上俊雄、須藤義也、竹内昭、三谷嘉伸、中地芳紀‥「電力系統動特性解析のためのコ
ンバインドサイクルプラントモデルの開発」電気学会論文誌B、119巻7号、
平成11年(1999)
【5-6]W.I.Rowen:"Simpli丘ed
MathematicalRepresentations
of
Heavy-Duty
Gas
Turbines'',
TransactionsofASME、Ⅵ)1105(l),PP.865-869(1983)
【5-7]"DynamicModelsforCombinedCyclePlantsinPowerSystemStudies",WorkingGroupon
PrimeMoverandEnergySupplyModelsfbrSystemDynamicPerfbrmanCeStudies,94WM
185づPWRS(1994)
【5-8晒野宏著 朝倉機械工学全書「ガスタービン」
朝倉書店(1997)
【5-9]須崎志郎、河田謙一、世古口雅宏、後藤益雄:「系統解析用コンバインドサイクル発
電プラントモデルの開発とアナログ型系統解析シミュレータによる動特性試験」、電気
学会電力技術・電力系統技術合同研究会資料、PE-99-51,pp.69-74(1999)
【5-10]S.Suzaki,K.Kawata,M.Sekoguchi,H.Konish,M.Goto:'MathematicalModelfbr
a
CombinedCyclePlantandItsImplementationinanAnaloguePowerSystemSimulator',in
PrOCeedingsoftheIEEEPowerEng・Soc・WinterMeeting,Singapore,January(2000.1)
【5-11]CIGREThskForce38-02-14:'Large
FrequencyDisturbances:Analysis
andModeling
Needs',Pp.554-558(1998)
【5-12]
A.Bagnasco,B.Delnno,G.B.Debegri,S.Massuco:'Management
and
Dynamic
PerformanCeOfCombinedCyclePowerPlantsDuringParallelandIslandingOperation',IEEE
TransactionsonPowerSystems,Vol.13,No・2,June(1998・6)
【5-13】電気学会技術報告、第869号:「電力系統における常時及び緊急時の負荷周波数制
御」、電力系統における常時及び緊急時の負荷周波数制御調査専門委員会、(2002.3)
136
付録
5.9
ガスタービンモデルブロック線図の導出(図5.13参照)
完全ガスの等エントロピー変化の式は、ポアソンの法則より
(付5.1)
ク′責=CO那′(:;≡≡γ=ヨ
Cpcは圧縮機における代表定圧比熱、Cvcは代表定積比熱。
等エントロピー変化時の終点温度T2*は付5.1式より
号=Ⅹ(瑠〕写
(付5.2)
±)
従って等エントロピー圧縮仕事は、ⅠいⅠ2*を全エンタルピーとして
A・W。・=J2.一丁l=㌦(ち.-1)=㌦・1・(ズー1)
(付5.3)
(A:仕事と熱エネルギーの換算定数(1/426.9kcal/kgm)
以降*印は等エントロピー
変化であることを示すものとする。)
また現実の圧縮仕事は
(付5.4)
A・W。=J2一丁l=㌦(ち.-1)
圧縮機等エントロピー効率77c=Wc./wcより
(付5.5)
ち=里1+(Ⅹ-1)/両
Ⅹ=(ア凡・Ⅳ′耶・(1+△〃))ヲ
用βは圧縮機圧力比で、彫偶(〟』〟の項は無次元解析による軸流圧縮機性能曲線から近
似的に求めたものである。圧縮機フィルタの圧力損失をg'とすると、
/)′ザり〃-ダノ
(付5.6)
空気流量伊時のろは4℃での定格空気流量を喝として
(付5.7)
ろ=ギ珊1-g′)貰(1十△〃)
等エントロピー変化時の終点温度㌔*は付5.1式より
≒=去(ズ1=(号〕甘,gr=告)
(付5.8)
ら′は燃焼器・タービンにおける代表定圧比熱、r■7は燃焼器・タービンにおける代表定積比
熱である。
137
従って等エントロピー圧縮仕事は、んんを全エンタルピーとして
(付5.9)
A・≠=ち一左・=C〆(ち-ち*)=C〆・ち・(1一言)
(A:仕事と熱エネルギーの換算定数(1/426.9kcal/kgm)
また現実の圧縮仕事は
(付5.10)
んwr=J3一丁。=C〆(ち-㌔)
タービン等エントロピー効率刀T=Ⅳァ/lりより
可-(1一言)′竹)灯=吾
(付5.11)
耳=‡代・町/‰・(1+㌦)‡甘
ら′はタービンにおける代表定圧比熱、r汀は代表定積比熱。燃焼器での圧力損失率をg':
タービン排気部の圧力損失率をg",とする。圧縮機、燃焼器、タービン排気部の合計の圧
力損失率をEとすると、
タJ乎2/ノーg"ノ
ア4ニ〃ナg,=ノアβ
ぢ ろ(1一宮′)
雪(1+g′′)馬
(付5.12)
(付5.13)
圧縮機空気流量が定格値の場合、付5.6∼7式により
ぢ_昂・代(1-g)(1-g′)
(1+△Ⅳ)
ぢ
(1+g′′)昂
(付5.14)
=巧,(1一句(1+dⅥ(E⊆g+g′+g′′)
燃焼がス流量埠時のP3は定格燃焼ガス流量を‰として
ぢ=用(1一蠍+購
(付5.15)
タービンでの燃焼ガスの仕事はそのエンタルピー変化分』〟と燃焼がス流量の積である
から、ガスタービンでの発生動力‰は
㌔G=goC打ち(1-1/gl)りr(隼・町-F))
(付5.16)
一方圧縮機での仕事ろは、空気のエンタルピー変化分』〟と空気流量の積であるから、
ろ=g。Cタ。1(ズー1)/恥Ⅳ
(付5・17)
ガスタービン出力ちは、ら=ん甥として得られる。定数C12,bllは実機でのタービン
回転数偏差に対するトルク、温度の補正係数である。
138
第6章
6.1
結論
本研究の結論、工学的意義
電力系統の安定度の向上を目指し、発電プラントやFACTS機器への高度な系統制御
技術適用により、高品質な電力供給システムを実現する新技法について論じた。
第1章の緒論に続き、第2章では軸ねじれ振動安定性の評価と軸ねじれ抑制制御方式に
ついて検討し以下の結果を得た。
(1)ユニット相互作用係数(UIF)と電気ダンピング係数による評価手法が軸ねじれ
振動現象発生有無判別のために有効な手法であることを確認した。直流系統と並列に
接続される交流系統の短絡容量が小さいはど、軸ねじれ振動が発生する可能性が高い
ことを明らかにした。クロスコンパウンド機は軸ねじれ振動特性の異なる2台の発電
機が並列運転されるため、軸ねじれ共振が発生しにくいことを数値シミュレーション
により明らかにした。
(2)軸ねじれ振動抑制装置(SSDC)の方式として有効と考える2方式について、比
較検討を行い、変換所交流母線電圧の』′を入力とし、制御角補正信号を付加する方式
が直流系の応答性を損なうことなく良好な抑制効果を得られることを明らかにした。
(3)周波数検出器の検出遅れ特性をモデル化し、複数の軸ねじれ振動共振周波数制御に
対応できるSSDCの制御ブロックを構築した。
(4)A
Fを入力とするS
SDCでは変換所交流系統と直流系統との相互作用が懸念され
たため、SSDCの制御ブロックに相互作用を抑制させる対策を実施し、その有効性を
検証した。
(5)実システムに適用するため抑制制御起動方式、監視・警報手段を含めた軸ねじれ振
動抑制制御システムを構築した。
(6)直流送電系と発電機の軸ねじれ相互作用を抑制する制御装置のために、軸ねじれ振動
検出用周波数センサについて検討した。軸ねじれ振動検出用センサとして、変換所交流
母線電圧の周波数検出方法を採用した場合、計画している直流送電システムで有効な軸
ねじれ振動抑制効果を得ることの出来る周波数センサの仕様を理論的考察およびシミ
ュレーション検討から決定した。
(7)母線電圧から周波数を極めて高速に検出する必要が発生し、検出精度・耐ノイズ性
と検出速度を両立させるという課題が発生した。周波数検出の原理は電圧波形のゼロク
ロス間の時間を検出してその逆数から求める手法を採用した。交流電圧一相分のみでは
等価的なサンプリング間隔が粗いため、周波数検出精度の限界が発生し、軸ねじれ振動
抑制制御に用いるには不適であることが判明した。そこで三相の電圧を用いることにし、
139
軸ねじれ振動周波数よりも高い130Hz程度までの振動数を検出可能なことを確認
した。また定常波に対する周波数の検出誤差は0.005Hz以下であることを確認し
た。
(8)周波数検出器の開発に当たっては、周波数検出のアルゴリズムを忠実に瞬時値ベー
スの解析プログラムで模擬し、軸ねじれ振動の抑制効果を検討した。さらに軸ねじれ
振動抑制制御装置を試作して、その効果を電力系統シミュレータによる総合試験を実
施して検証した。
(9)実系統を用いた系統連系試験を行い、SSDCの効果によりタービン一発電機軸の
軸ねじれ振動が安定化することを確認できた。
今回開発した周波数検出器は高い信頼性が要求され、高速な応答性が要求される他の
パワエレ機器にも適用が可能な技術である。
第3章では発電機励磁系の制御に非線形制御という新しい制御方式を適用することによ
り送電系統の送電可能電力を増大することを目的に研究を進め、以下の結果を得た。
(1)発電機励磁制御系へ非線形制御を適用した場合の基本制御アルゴリズムを開発した。
(2)非線形制御はその厳密性のために、モデルパラメータ変動等のモデル誤差に対する
ロバスト性に問題がある。電力系統の状態変化というパラメータ変動を発電機から系統
を見た時の等価的な電圧、インピーダンス変化により検出して、その結果を厳密線形化
のためのフィードバックゲインに反映させる手法を開発した。このローカルな計測量の
みから系統モデルを推定する手法は他の制御方式にも適用できるものである。
(3)発電機の非線形制御ブロックをディジタルシミュレーションにより検討した。さ
らにディジタルシグナルプロセッサー(DSP)を用いて制御装置を試作し、非線
形制御の効果をシミュレータ試験により検証した。
(4)非線形制御を実用化する上で問題となる微分演算の代わりに、最小自乗法による
直線近似式の勾配を計算する方式を新規に工夫して採用した。この方式によりノイ
ズ等による演算不安定現象を避けることができ、非線形制御が有効に動作すること
を確認した。
(5)非線形制御は従来型PSSに比べて2%(シミュレータ試験)から4%程度(数
値シミュレーション)安定限界出力が増加することが確認できた。
第4章ではSTATCOMの制御に非線形制御という新しい制御方式を適用すること
により送電系統の送電可能電力を増大させることを目的に研究を進め、以下の結果を得
た。
140
(1)自励式SVC(STATCOM)の系統制御に非線形制御を適用した場合の基本制
御アルゴリズムを開発した0この考え方は他のFACTS機器にも適用できる汎用的
なものである。
(2)実用化のための検討を進め、制御装置の試作、及び試作制御装置を用いたシミュレ
ータ試験を行い、非線形制御の有効性を確認した。
(3)非線形制御は従来型PI制御に比べて約1%(シミュレータ試験)から約6%程度
(数値シミュレーション)安定限界出力が増加することが確認できた。
(4)制御装置の概念設計を行い、実用化装置の仕様を提案した。
本研究では制御アルゴリズムの開発、制御装置の試作等中心課題は達成したが、効果評価
については限定条件で行っており、種々の条件下での試験等を今後も継続して進めたい。
第5章では電力系統動特性解析用のACC(改良型コンバインドサイクル発電プラ
ント)モデルを開発し、静特性及び動特性に閲し開発モデルと実機計画値、プラント本体
設計部門での詳細モデルによる模擬結果との比較評価結果を述べた。
(1)開発したモデルにて静特性、動特性とも必要な精度が得られることが確認できた。こ
のシミュレーションモデルで安定燃焼の評価ができる可能性を確認した。
軽負荷時には燃焼ガスとタービン翼との摩擦によるロスのため冷却用空気流量の比
率が増大し、タービン入口圧力が低下してタービン効率が低下する。このような冷却用
空気流量の比率やタービン効率の非線形特性を考慮しないと、ガスタービン出力や排ガ
ス温度を正確に模擬することができない。従来のモデルでは冷却用空気流量やタービン
効率の非線形性は無視されていた。
(2)従来のモデルでは実プラント各部の諸量を具体的に表現するという視点からは改良
の余地がある。周波数制御時のプラント運転の安定性を検討し、制御系の最適化を実
現するためには燃料流量、空気流量および排気温度制御系を詳細に模擬する必要があ
る。従来のモデルは制御系を簡略的に模擬していた。このような観点から開発したモ
デルは実機プラントの制御ブロックのうち起動・停止を除いた定常運転時に動作する
制御ブロックを詳細に模擬している。
(3)開発したプラントモデルは大容量プラントをモデルとした大規模なもので、ディジ
タルシグナルプロセッサー(DSP)上にソフトウェアとして模擬している。このDS
Pで構成されたディジタルシミュレータをシミュレータAPSAと接続してハイブリ
ッドタイプのシミュレータを構成するようにしている。今回開発したモデルにより系
統事故発生時のACCの応動を詳細に検討することができる。
(4)ACCは燃料流量制御の応答は速いが空気流量制御の応答は遅いため、排ガス温度、
141
燃空比の評価が必要である。
(5)プラント内の熱力学的な関係をブロック図で表現しかつ実機の動特性を模擬できる
動特性モデルを開発した。動特性モデルおよび制御系はすべてブロック図で表現してい
るので、容易に作成、修正ができ非線形な特性も入力できる。
(6)このモデルは分散電源として普及しているガスタービンプラントにも応用すること
ができる。
(7)ガスタービンの起動、停止等を含んだ系全体の詳細な挙動解析を行なうには更に精
密なモデルの開発が必要である。
電気事業の自由化が進展していけば、今後電力系統が複雑化し、運用面で不確実性が増
大すると予想される。このような状況下にあって本研究の成果が、電力系統の安定運用に
適合した発電機制御系、FACTS機器制御系の設計に何らかの貢献をするところがあれ
ば筆者の最も幸いとするところである。
142
残された課題、将来展望
6.2
(1)発電機の軸ねじれ振動抑制制御
(第2章)
第2章で述べた発電機軸ねじれ抑制制御は既に実プラントに適用されており、現地で
の検証試験も完了している。軸ねじれ振動を変換所母線周波数にて検出するが、電圧波形
の零クロス点を計測して周波数を検出する場合、検出遅れ時間が発生する。FACTS機器
の瞬時的な応答を活用し、制御系設計を容易にするために、周波数検出の高速化が必要で
ある。
(2)非線形状態方程式の厳密線形化手法による発電機制御・非線形最適制御
STATCOMによる系統安定化
(第3章、第4章)
第3章と第4章で示した非線形状態方程式の厳密線形化手法による安定化制御につ
いては、制御の効果を定量的に評価した。この効果評価については限定条件で行ってお
り、種々の条件下での試験等を今後も継続して進めたい。また過渡的な位相角動揺、電
圧動揺及び周波数動揺を同時に抑制するため、発電機励磁系とガバナ系へ非線形制御と
ロバスト制御を組み合わせて適用した場合の制御系設計手法を確立していきたい。
今後電力系統の監視・制御のために同期計測技術が導入されていけば、遠隔地の多数
の情報が入手可能となり、非線形制御の実用化が容易になるものと考えられる。さらに
発電機やFACTS機器の協調的な制御も可能になる。
サイリスタ制御直列コンデンサ(TCSC)、高速移相器(HSPS)、自励式移相調
整器(UPFC)などのFACTS機器にも非線形制御適用を検討する予定である。さ
らに配電系続や分散電源の制御にも非線形制御の適用を検討していきたい。
(3)系統解析用コンバインドサイクルモデルの開発
(第5章)
第5章で示した系統解析用コンバインドサイクルモデル(ACCモデル)は大容量プ
ラントをモデルにしたもので、非常に大規模なものである。今後実機のガバナフリー制御
をモデル化し、系統周波数の変動に対するACCの応動特性について評価していく予定で
ある。プラント挙動の解析には更に精密なモデルの開発が必要であり今後検討を進めてい
く。
またマイクロガスタービンやコージェネプラントのような分散電源の応動解析にも応
用を検討していきたい。
143
謝辞
本研究の遂行ならびに本論文の作成にあたり、終始懇切丁寧なる御指導を賜った名古屋工
業大学大学院
中村光一教授、神藤久教授および平井洋式教授に甚大なる感謝の意を表しま
す。
また、本論文の作成にあたり、有益なる御助言と御指導を賜った名古屋大学理工科学総合
研究センター
後藤益雄教授に厚く感謝いたします。
本論文を進めるにあたり、教育の機会を与えていただき、また多大の御指導、御助言をい
ただいた日立製作所電機システム事業部岩谷二三夫変電システム本部長、大山一浩送変電エ
ンジニアリング部部長に深く感謝の意を表します。
本研究は、著者が日立製作所において携わった紀伊水道直流送電プロジェクト、NEDO
国際共同研究「非線形制御適用による電力系統の安定度向上と送電容量増大の研究」および
「APSA発電機プラントモデルの開発研究」の中で得られた成果の一部をまとめたもので
ある。
この論文の作成において、懇切な御指導と励ましをいただいた日立製作所電機システム事
業部牧野淳一博士、小西博雄主管技師、柏崎博主任技師、真鳥岩男主任技師、その他関係す
る多くの上司、先輩各位に心より御礼申し上げます。また、本研究は関西電力株式会社、四
国電力株式会社、電源開発株式会社、東京大学、中国清葦大学の方々にも共同研究の中で御
協力いただいており、東京大学横山明彦教授、中国清華大学LuQiang教授をはじめ多くの
方々に御礼申し上げます。
末筆ながら、本研究の遂行にあたり御協力いただいた多くの職場の関係の方々に感謝いた
します。
144
研究業績
学会誌掲載論文
(1)須崎士郎、河田謙一、世古口雅宏、後藤益雄:「系統解析用コンバインドサイクル
発電プラントモデルの開発」
年(2000).
電気学会論文誌B,120巻
8/9号,平成12
(第5章と関連)
(2)天野雅彦、世古口雅宏、禰里勝義、河田謙一:「ブローニー解析法による電力系統
実測データの動揺モード検出」
年(2000).
電気学会論文誌B,120巻
2月号,平成12
(第3章と関連)
国際学会発表論文
(1)MasakazuSato,KoqiiYam年ii,KazuoKato,Masahiro
"Damplng
Controlfor
Sekoguchi,IwaoMatori,MasuoGoto
GeneratorTbrsionalOsci11ation
Due
to
theInteraction
with
HVDC"
InternationalSessionsinIEEJ-Power&EnergySocietyAnnualConftrence,No.1140saka
(1996).
(第2章と関連)
(2)ShirouSuzaki,KenichiKawata,MasahiroSekoguchi,MasuoGoto:,MathematicalModelfbr
aCombinedCyclePlantandItsImplementationinanAnaloguePowerSystemSimulator',1n
PrOCeedingsoftheIEEEPowerEng・Soc・WinterMeeting,Singapore,January(2000).
(第5章と関連)
(3)MasahiroSekoguchi,HirooKonish,MasuoGoto,Akihiko
Stabilizing
ControIUsing
Yokoyama,QiangLu:`Nonlinear
State-SpaceLinearization',BulkPower
SystemDynamics
and
ControIV,August26-31,Onomichi,Japan,(2001).
(第3章と関連)
(4)Masahiro
Sekoguchi,Hiroo
'Decentralized
Nonlinear
Konish,
Stabilizing
Masuo
ControI
Goto,Akihiko
Using
Yokoyama,Qiang
State-Space
Lu
Linearization,,in
PrOCeedingsoftheIEEEPowerEng・Soc・WinterMeeting,NewYork,January(2002).
(第3章と関連)
(5)MasahiroSekoguchi,HirooKonish,MasuoGoto,Akihiko
Yokoyama,QiangLu:'Nonlinear
OptimalControIAppliedtoSTATCOMforPowerSystemStabilization,,IEEE/PES
Conftrence2002:AsiaPaci丘c,(2002).
(第4章と関連)
145
T&D
関連する特許
(1)世古口雅宏、後藤益雄、兵鳥岩男、吉栖立格、東正樹、村上弘明、加藤和男:「直流
送電制御装置」
特許番号特許第3184812号、
登録日
(2001.4.27)
(第2章と関連)
(2)東正樹、植原宣和、加藤和男、世古口雅宏、後藤益雄、田能村顕一、荒井純一、
鈴江武彦:「交直変換器の制御装置」
公開日
公開番号特許公開2001-333534
(2001.11.30)
(第2章と関連)
(3) 世古口雅宏、後藤益雄、天野雅彦、柴田勝彦、禰里勝義、西垣内秀俊:「発電機励
磁制御装置」
公開番号特許公開2002-34298、
公開日
(第3章と関連)
■
146
(2002.1.31)
© Copyright 2026 Paperzz