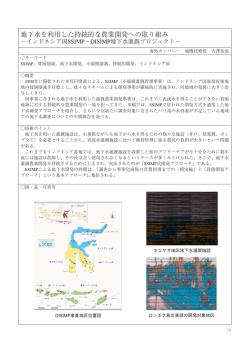
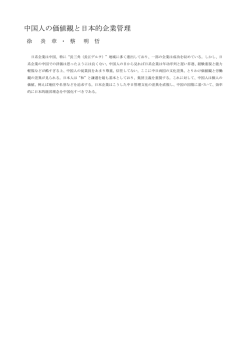
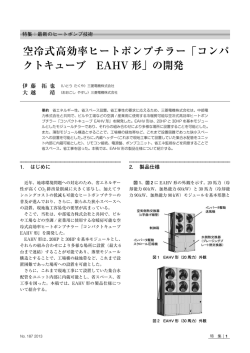
位置フィードバックループと力フィードバックループの 弱干渉を用いたハイブリッド制御法 永田寅臣 ∗1 渡辺桂吾 ∗2 楠本幸裕 塚本 治 ∗4 尾本正明 ∗5 ∗3 安田仁徳 ∗4 津田邦博 芳賀善九 ∗5 長谷哲夫 ∗4 ∗5 An Open-Architecture-Based Hybrid Control Method with a Weak Coupling between Position Feedback-Loop and Force Feedback-Loop Fusaomi Nagata, Keigo Watanabe, Yukihiro Kusumoto, Kiminori Yasuda Osamu Tsukamoto, Masaaki Omoto, Zenku Haga and Tetsuo Hase 本稿では,まず,デカルト座標系における位置制御系と力制御系を弱く干渉させるハイブリッド制御法を提案した。 このハイブリッド制御法では,位置制御系の閉ループゲインを小さく設定することで力制御系に対して微妙に干渉 させている。これにより,力に関する3自由度の拘束に加えて位置に関する最大3自由度の弱い拘束を同時に満たす ことができるようになった。つぎに,提案手法をオープンアーキテクチャ型の産業用ロボット MOTOMAN UP-6 を ベースに開発した磨きシステムに適用し,ジュラルミン製のペットボトル金型の磨き実験を通して性能を評価した。 その結果,磨き力の安定性に加えて目標軌道への追従性 (ピックフィード制御) についても良好な結果が得られた。 1 はじめに これまでに提案されている位置と力のハイブリッド・ 制御則によりワーク表面をジグザグ軌道などに沿って移 動する。このとき,砥石とワーク間に作用する磨き力 コントローラでは,例えばツール座標系などの拘束フ は力 FB 制御則 (3 方向への力の拘束) により目標値に追 レームに沿って 3 自由度すべてに関する位置の目標軌道 従させる。この力 FB 制御則からの操作量により,ジグ と 3 自由度すべてに関する力の目標値が設定できるよう ザグ軌道に沿った位置 FF 制御則だけでは正確なピック に構成されている。この場合,これら 6 つの拘束を同時 フィードを刻めなくなるため,ピックフィード方向にの に満たすことはできないが,作業内容に応じてスイッチ み緩やかな位置 FB 制御系 (1 方向以上の位置の拘束) を 行列を設定することで 3 自由度の各方向において位置と 構成するこで弱干渉させることとした。ただし,力制 力のどちらかのモードが選択できるようになっている。 御系と位置制御系の各 3 方向のゲインは,力制御系が砥 しかしながら,このことは金型磨きのように自由曲面 石の経路を乱さないような,また位置制御系が磨き力 を有するワークに対して指定された磨き力を安定的に の安定性に大きく影響しないような程度で実用上問題 発生させながらピックフィード方向に沿った倣い制御を とならないように注意深く選定されなければならない。 行う必要がある作業,すなわち同時に 4 つ以上の拘束 (3 方向への力の拘束と 1 方向以上の位置の拘束) を満足さ せる必要がある作業には適用できないことを意味する。 3 まとめ 本稿では,ロボットベース座標系においてあえて力制 御系と位置制御系を弱く干渉させたハイブリッド制御法 2 研究内容 を提案した。提案手法をオープンアーキテクチャ型の 自由曲面を有する金型の磨き作業をロボットに行わせ 産業用ロボットに適用することで,ボールエンド形状 る場合に必要となる「3 方向への力の拘束と 1 方向以上 の軸付き砥石に作用する磨き力を目標値に追従させる の位置の拘束」を実現するための位置/力ハイブリッド と同時に CL データで与えられるピックフィードに沿っ 制御法について検討した。このハイブリッド制御法は, た送りを実行できる金型磨きロボットを実現した。 デカルト座標系で構成している。まず,アーム先端に装 着するボールエンド砥石は CAD データに基づく位置 FF ∗1 機械電子研究所 *2 佐賀大学 ∗ 3 インテリア研究所 *4 (株) エーエスエー・システムズ ∗ 5 (株) メイホー R&Dセンター 4 掲載論文 日本機械学会論文集 C 編, Vol. 71, No. 701, p. 178, (2005)
© Copyright 2026 Paperzz