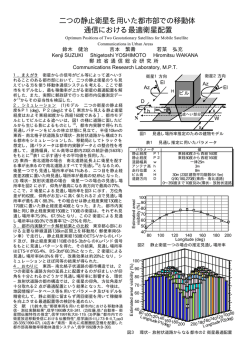
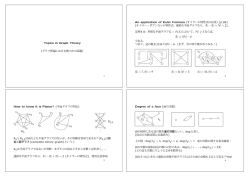
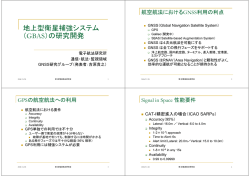
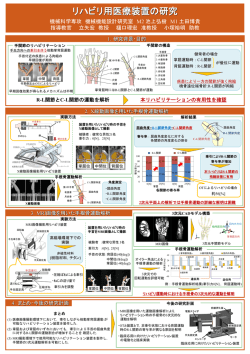
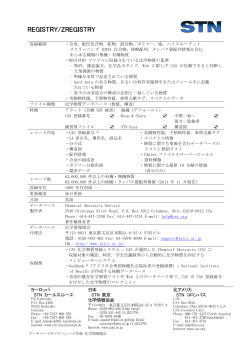
平成24年度 卒業研究 走行システムに着目した車輪型探査 ローバの最適化設計 高知工科大学 機械システム工学群 航空宇宙工学専攻 知能制御工学研究室 学籍番号 1130170 氏名 村上遼 目次 1. はじめに・・・・・・・・・・・・・・・1 2. 実験システム・・・・・・・・・・・・・2 3. ホイールベースと姿勢変化に関する静力学解析・・12 4. 正規化エネルギー安定余裕による安定性解析・・・15 5. まとめ・・・・・・・・・・・・・・・・18 6. 参考文献・・・・・・・・・・・・・・・19 1.はじめに 1.1 月・惑星探査の意義 月・惑星探査の意義として,科学的意義が挙げられる.宇宙,太陽系の起源 を解明することは人類共通の意志であり,科学的に重要である.また,将来の 月面基地建設や資源の活用を行う上で,月・惑星探査は必要不可欠である. 1.2 月・惑星探査の方法 月・惑星探査はその探査方法により,フライバイ,オービタ,ランダ,ロー バの4種類に分けることが出来る.フライバイ,オービタとは,衛星を用いたリ モートセンシングである.フライバイは,惑星近傍を衛星が通過する際に,観 測を行い,オービタは衛星を惑星周回軌道上に乗せ,継続的に観測を行う.ラ ンダ.ローバとは,惑星表面に探査機を着陸させ,直接探査を行うというもので ある.ランダによる探査は,着陸地付近でのみ探査を行うが,ローバによる探 査では,惑星表面を移動して,ランダと比較して広範囲の探査が可能であると いう違いがある.従って,詳細な地質調査やサンプル収集を行ううえで,ロー バによる探査は重要であると考えられる. 1.3 過去のローバに関する研究 現在に至るまで様々なローバが開発されている.例えば,はやぶさに搭載さ れたミネルバや火星探査のために開発されたアメリカのスピリットやオポチュ ニティなど多岐にわたる.火星探査を目的としたスピリット,オポチュニティ が車輪型ローバであるのに対し,小惑星イトカワを目的としたミネルバは飛び 跳ねて移動するローバである.その技術は探査対象の天体に適したものとなっ ている[1]. 月や火星の表面は砂で覆われた軟弱な地盤や急な坂など不整地となっている. そのため,一旦スタックに陥ると地球上とは異なり,人の手によって抜け出す ことが不可能である.その結果,探査を続けることが不可能となることも考え られる.そのため,ローバには高い走行性能が求められることになり,走行性 能を向上させるための研究が過去行われてきた.不整地走破性能を表す物理量 として,車輪の路面粘着性,車体の転倒安定性を用いた研究[2][3]が行われてい る.その他に,軟弱地盤上の車輌の力学解析であるテラメカニクスを用いて, ローバの斜面における走行力学を解析し,ローバの不整地走破性能向上を試み る研究[4]や,シミュレーションを用いた不整地移動ロボットの構造最適化を行 う研究[5]などがある.このように,走行システムの設計についてのアプローチ は多岐にわたるが,確立したアプローチは提案されていない. 1 そこで,本研究では,砂地や散在した岩石のような不整地踏破に最適なロー バの走行システムの設計指針を明らかにすることを目的とする.本稿では,車 両パラメータ(ホイールベースと受信位置高さ)と不整地走行時のローバの姿 勢変化について実験的考察を行う.ローバの姿勢変化に対して,静力学的解析 を行い,土壌と車輪に関する力学的解析であるテラメカニクスを用いて,より 正確なローバの姿勢角の推定を行う.また,正規化エネルギー安定余裕を用い て,ローバの安定性解析を行い,ローバのロール方向の転倒限界角の導出を行 う. 2.実験システム 不整地走行時のローバの姿勢変化を計測するため,実験を行った.以下,本 実験について述べる. 2.1. ローバテストベッド 本実験に用いたローバ(図 1)について説明する.本ローバの左右の脚部は, ディファレンシャルリンクによって連結されており,障害物乗り越えに高い能 力を示す.ホイールベースおよび重心位置は,車輪取り付け治具を前後および 上下に動かすことで調整が可能である.ローバの寸法を表1に示す.頭頂部に はカメラ 2 台とレーザ距離計が取り付けられており,ローバ周囲の地形認識を 行うことも可能である. 表 1 ローバテストベッド寸法 ホイールベース[mm] 600~1000 重心位置[mm] 400~560 トレッド[mm] 600(固定) 図 1 ローバテストベッド 2 図 1 ローバテストベッド 2.2 実験環境 本実験は図 2 に示す環境で行った.実験場(6.5x5.0 m)は珪砂で覆われてい る.また,実験場を取り囲んでいるフレームには 8 台の赤外線カメラが取り付 けられている.観測対象に赤外線を反射するマーカを付けることにより,位置 や姿勢の変化を高精度で計測することも可能である.計測分解能は約 0.1 mm で ある. 図 2 テストフィールド 2.3 実験内容 本実験の様子を図 3,図 4 に示す.前述した実験場にローバと障害物を設置し, 表 2 に示すようにローバのホイールベースと重心位置高さを変化させた.表 2 に示したすべてのホイールベースと受信位置高さの組み合わせで実験を行い, ローバが障害物を片輪で乗り越える際の姿勢変化の計測をモーションキャプチ ャで行った.このとき各条件において 3 回同様の実験を行い,全体では計 18 回 実験を行った.障害物は高さ 200 [mm],登坂角度 60 [deg]の金属とアクリル板で 構成された三角柱であり,表面に研磨布を張り付けた.ローバと障害物の距離 は 1200 [mm]で一定である.以下,実験手順を示す. 1.表 2 に示すホイールベース,重心の組み合わせをもつローバを障害物から 1200 [mm]の位置に設置する. 2.ローバの車輪速度を 100 [mm/s]で一定となるように制御する. 3.モーションキャプチャにより,サンプリング周期 100 [Hz]でローバの位置・ 姿勢を計測する. 3 4.走行終了後,ローバのロールやピッチについて姿勢変化の解析,評価を行う. 5.実験場の砂をならし,実験に影響が生じないようにする 図 3 実験の様子 図 4 実験風景 4 表 2 ローバテストヘッド変更寸法 ホイールベース[mm] 600,800,1000 重心位置[mm] 400,560 2.4 実験結果 実験結果を表 3,図 5,図 6 に表す.図 5 より,ピッチ方向,ロール方向の姿 勢変化について考察を行う.最初にピッチ方向の姿勢変化について考える.ホ イールベースが長くなるにつれ,ピッチ方向の最大姿勢変化が増加することが 確認できた.また,重心位置高さが高くなるにつれて,ピッチ方向の最大姿勢 変化が減少することが確認できた. 次に最大ロール角について考える.図 5 より,ホイールベースが長くなる程, 最大ロール角が増加していることがわかる.ホイールベースが長くなるとディ ファレンシャルリンクが動きやすくなり,地面に接地している側のタイヤによ る地面の轍が深くなる.その結果,ローバのロール方向の傾きが大きくなった と考えられる.また,ローバの前輪,後輪によって,ロール角の最大変化量が 異なることが実験結果よりわかった. 表 3 各条件における最大回転角度の絶対値 Yaw[deg] Roll[deg] Pitch[deg] WB600,CG400 7.31 14.21 11.63 WB800,CG400 4.80 15.41 8.27 WB1000,CG400 2.98 15.69 7.14 WB600,CG560 9.44 13.01 10.27 WB800,CG560 5.82 13.26 8.01 WB1000,CG560 4.99 14.01 7.14 ※ホイールベース(Wheeled base(WB)) ,重心位置(Center of Gravity(CG)) 5 図 5.1 WB600 mm,CG400 mm 時のピッチ角 図 5.2 WB800 mm,CG400 mm 時のピッチ角 6 図 5.3 WB1000 mm,CG400 mm 時のピッチ 図 5.4 WB600 mm,CG560 mm 時のピッチ角 7 図 5.5 WB800 mm,CG560 mm 時のピッチ角 図 5.6 WB1000 mm,CG560 mm 時のピッチ角 8 3 1 angle of rotation[deg] -1 -3 -5 -7 -9 trial1 -11 trial2 -13 trial3 -15 -17 0 10 20 30 40 time[s] 図 6.1 WB600 mm,CG400 mm 時のロール角 図 6.2 WB800 mm,CG400 mm 時のロール角 9 図 6.3 ホイールベース 1000 mm,400 mm 時のロール角 図 6.4 WB600 mm,CG560 mm 時のロール角 10 図 6.5 WB800 mm, CG560 mm 時のロール角 図 6.6 WB1000 mm,CG560 mm 時のロール角 11 3.ホイールベースと姿勢変化に関する静力学解析 実験結果を元に,ローバのピッチ方向とロール方向の最大姿勢変化について 静力学解析を行った.また,テラメカニクスを用いて,正確な姿勢変化の推定 を行った. 3.1 ピッチ方向の最大姿勢変化に関する静力学的解析 ここで,ディファレンシャルリンクの影響を考慮しない場合,ローバの最大 ピッチ角は以下の式より求めることが可能である. h θ= sin-1 L o …(1) wb θ[deg]は最大ピッチ角,ho[mm]は障害物高さ,Lwb[mm]はホイールベース長さを 表す(図 7).また,本実験に用いたローバテストベッドにはディファレンシャ ルリンクが搭載されている.これは,ワイヤーを介して左右のリンクを連結す ることにより,左右のリンクの回転角𝜃1 ,𝜃2 とローバのボディの角度𝜃0 が以下の 式の関係になるように設計されている[6]. 𝜃1 = −𝜃2 … (2) 𝜃1 + 𝜃2 … (3) 2 従って,ディファレンシャルリンクの影響を考慮すると,ローバの最大ピッチ 角は以下の式で表される. 𝜃0 = 1 -1 ho θ= sin … (4) 2 Lwb 次に,車輪による沈下量について述べる.図7より,軟弱地盤上のローバの車 輪に生じる力 F は, F= Mg (L 2L cosθ cosθ + h0 sinθ) … (5) となる.また,軟弱地盤上の車輪による沈下量𝑍0 は下式から求められる. 𝐾 + 𝑏𝐾 √𝐷𝑍0 𝑍0 (3 − 𝑛) … (6) 3 ここで,M[kg]はローバ質量,b[m]は車輪幅,D[m]は車輪直径,𝐾 , 𝐾 , 𝑛 は土壌 F= パラメータを表す.実験場の砂が珪砂であることから,今回は,せん断試験で 珪砂とほぼ同じ値を取った砂のパラメータを採用した[7].以上より,車輪によ る沈下を考慮した最大ピッチ角は以下のようになる. 1 -1 ho + 𝑍0 θ= sin … (7) 2 lwb 12 これらの理論式と実験値を比較したグラフを図 8 に表す.図 8 より,車輪によ る沈下量を考慮することで,実験値との差が減少していることがわかる.以上 より,軟弱地盤上においても,ホイールベース長が増加するにつれて,ピッチ 角が減少していることが確認できた. 図7 WB と最大ピッチ角 図 8 ピッチ角 13 3.2 ロール方向の最大姿勢変化に関する静力学解析 次に,ロール方向の最大姿勢変化に関して静力学解析を行った結果について 述べる.3.1 においてピッチ方向の最大姿勢変化の推定を行ったが,ロール方向 に関して同様に行った結果を図 8 に示す.ピッチ方向と比較して実験値と理論 値の差が大きいことがわかる.これは,静力学解析を行う際,2 次元で行ったこ とが原因と考えられる. 図 9 ホイールベースに対する最大ロール角 14 4.正規化エネルギー安定余裕による安定性解析 ローバが障害物を片輪で乗り越える際に考慮する必要がある問題の一つにロ ール方向への転倒が挙げられる.ここでは,重心位置高さの変化によるローバ のロール方向への転倒安定性の評価を行う.正規化安定エネルギーは,移動ロ ボットが転倒する際に,重心が描く軌跡の最大高さhmaxと初期位置h0との鉛直方 向距離の差SNE で安定性を示すものである[8]. =h − h0 このSNEが大きいほど移動ロボットは安定であり,SNEが0となる時,移動ロボッ トは転倒するというものである. 過去の研究では,クローラ型ロボットの安定性評価を行うため,正規化エネ ルギー安定余裕が用いられている[9][10].本研究では,車輪型ローバのロール 方向への姿勢変化について正規化エネルギー安定余裕を求め,安定性について 考察を行う. 4.1 正規化安定エネルギーの導出 図8 のようにローバのロール方向への姿勢変化を考えると,hmaxは線分の長さ で表される.このとき障害物高さに対するSNEを考えると,次式で表される. た だし,h0 は転倒開始時の障害物高さである. =h − h0 L =√ 2 −h 4 + (h + h 2 0 2 ) − (h + h ) 2 ここで幾何学的に考えると,ロール角φと障害物高さhobの間には以下の関係が ある. L sin φ = h0 従って,ロール角を用いて正規化エネルギー安定余裕を次式のように表すこと ができる. L 2 − L sin =√ 4 + (h + 15 L sin 2 0 2 ) − (h + L sin ) 2 4.2 ロール方向の姿勢変化に対する安定性解析 図10 にローバのロール方向の姿勢変化角φ [deg] に対する正規化エネルギ ー安定余裕SNEを示す.図10より,CG400 時の転倒限界角度は25.5 [deg],CG560 時 の転倒限界角度は24.8 [deg] であることがわかる.また,本実験で計測した各 重心位置におけるロール角はすべて転倒限界角度以下となっている.実験では ローバの転倒が生じなかったことから,実験結果とも矛盾していないことがわ かった.以上から,正規化エネルギー安定余裕は転倒限界角を求める上で,有 用であることがわかった.また,本実験結果から,ホイールベースが長くなる ことでロール方向の姿勢変化が増加することが確認されている.従って,ホイ ールベースに対しても,今回の安定性解析を利用することが可能であると考え られる. 図 10 正規化エネルギー安定余裕 16 80 70 SNE [mm] 60 50 CG400 40 CG560 30 20 10 0 10 15 20 25 30 35 roll angle [deg] 図 11 ロール角に対する正規化エネルギー安定余裕 17 5.まとめ 本研究では,ローバの走行システムに着目し,最適化設計の指針の提案を行 うことを目的とした. そして実験結果より,ホイールベースを長くすることでピッチの変化量が減 少することが実験的にわかった.また,車輪の沈下量を考慮することで,理論 式と実験値の差を減少させると共に軟弱地盤上においてもホイールベースとピ ッチ方向の姿勢変化の関係が成り立つことが確認できた.また,複雑な動力学 シミュレーションを行わずに,比較的シンプルな静力学解析によって,ローバ のピッチ角を求めることが可能であることを確認でき,設計に利用できること も確認できた. しかし,ホイールベースを長くすることで,ロールの変化量が増加すること もわかった.従って,ディファレンシャルリンクを搭載したローバが軟弱地盤 を走行する際は,ホイールベースを長くすることがローバの姿勢変化を抑制さ せるとは必ずしも言えないとわかった. また,正規化エネルギー安定余裕を用いた不整地走行時のローバのロール方 向の安定性解析を行った.解析結果より,転倒限界角を求めることが出来た. また,この結果を用いてローバの設計指針をより明示することが可能であると 推察する. 今後は,本実験結果からスリップ率や安定性を導出し,ホイールベースや車 高の変化によってそれらにどのような変化が生じるのか考察を行う.また,最 適化設計を行う上での評価指標となるか,検討を行う予定である. 18 6.参考文献 [1]Aravind Seeni,Bernd Schafer and Gerd HIrzinger : Robot Mobility Systems for Planetary Surface Exploration-State-of-the-Art and Future Outlook:A Literature Survey, Aerospace Technologies Advancements, 2010 [2]中村壮亮:重心移動可能な車輪型ロボットにおける不整地走破性,東京大学大 学院工学系研究科電子工学専攻修士論文, 2007 [3]内木孝将:アクティブサスペンションを有する惑星探査ローバの不整地走破 性能に関する研究,東京大学大学院工学系研究科電気系工学専攻修士論文,2010 [4]三輪章子,石上玄也,永谷圭司,吉田和哉:テラメカニクスに基づく月・惑星探 査 ロ ー バ ー の 登 坂 性 能 解 析 , 第 11 回 ロ ボ テ ィ ク ス ・ シ ン ポ ジ ア , 6A2,pp.514-519,2006 [5]佐藤正紀,神田敦司,石井和男:動力学シミュレーションと進化型アルゴリ ズムを用いた不整地移動ロボットの構造最適化,ロボティクス・メカトロニク ス講演会講演概要集,”2A2-E11(1)”-“2A2-E11(4)”,2009 [6]石上玄也:月・惑星探査ローバーのステアリング特性に基づく走行力学の解 析,東北大学大学院工学研究科航空宇宙工学修士論文,2005 [7] J.Y.WONG:THEORY OF GROUND VEHICLS, 2008 [8] 広瀬茂男 塚越秀行 米田完,不整地における歩行機械の静的安定性評価基 準,日本ロボット学会誌,16(8),pp1076-1082,1998 [9] 山崎文仁,永谷圭司,吉田和哉,不整地走行機構を有する移動ロボットの 自律走行の実現,第13 回ロボティクスシンポジア予稿集,pp277-282,2008 [10] 秋山健,木下宏晃,長谷圭司,吉田和哉,多田隈建二郎,西田信一郎,軟 弱かつ急斜面の不整地走行を目的とした単純脚・クローラハイブリット型移動 ロボットの開発,日本機械学会ロボティクス・メカトロニクス講演会 ROBOMEC2011,2A2-L4, 1-4,2011 19 謝辞 本研究を進めるにあたり,指導教官の岡宏一教授にはご多忙の中,的確なご 指導して頂きました.また,私の希望を尊重して JAXA 宇宙科学研究所で研究 を行う機会を設けて頂き,深く感謝いたします. 久保田孝教授には研究に関し丁寧なご指摘,ご指導を頂きました.本研究を 行う機会を与えて頂き,御礼申し上げます. 橋本樹明教授には,研究発表の際鋭いご指摘を頂き,深く感謝いたします. 大槻真嗣助教には,研究を行う上でご支援,ご指摘頂きました.大槻助教の ご支援がなければ,本研究を行うことは出来ませんでした.深く感謝いたしま す. 石上玄也研究員には,研究全般に関してご指導,ご指摘頂きました.初めて 研究活動を行うにあたり,研究に対する姿勢や取り組み方,考え方を学ばせて 頂き,とても感謝しております. 高知工科大学岡研究室,JAXA 宇宙科学研究所久保田研究室の両研究室の先 輩の皆様,同期のみなさんには,研究を行うにあたり大変お世話になりました. 大学から離れて研究を行う中ご迷惑をお掛けすることもありましたが,立花さ ん,岡崎さん,坂本さん,中村さん,山脇さん,藤田さんをはじめとする岡研 究室の皆様には助けて頂き,ありがとうございました.4 年次に急にお世話にな ったにも関わらず温かく迎え入れて頂いた,内木さん,前田さん,大津さん, 清水さん,梶原さん,関口さん,茂渡さん,宮田さん,藤井さんをはじめとす る久保田・橋本研究室の皆様にはとても感謝しております.ありがとうござい ました. 最後に大学に進学させて頂き,4 年間支援して頂いた家族に深く感謝いたしま す. 20
© Copyright 2026 Paperzz