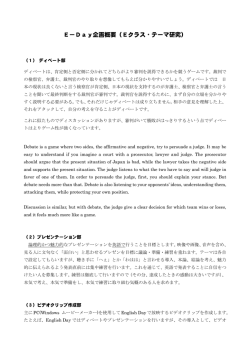
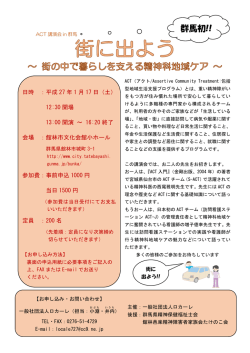
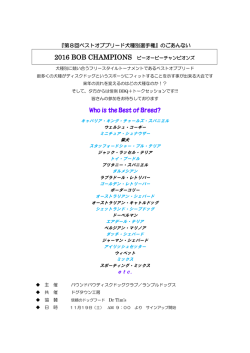
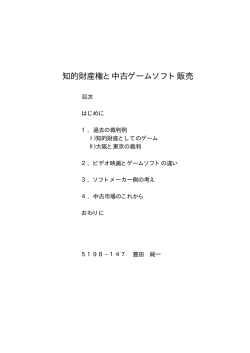
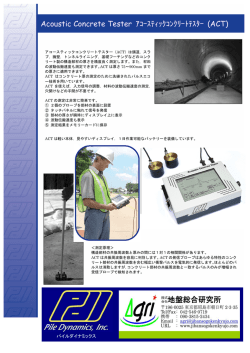
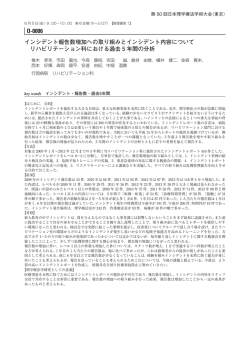
第 73 回 月例発表会( 2004 年 10 月) 知的システムデザイン研究室 人工物における知的性質の調査及び知的照明システムへの適応 ∼Survey on the Level of Systems Intelligence in Artifacs and Adjustment to Intelligent lighting system∼ 佐野僚 Ryo SANO Abstract: For recent systems, ”Making intelligent” has become fixated, and high-level technology is required. In our laboratory the concept of intelligence is devise. Such as increase the performance artificial material, convenience of the user improves, and raising environmental affinity.Furthermore, also the meaning, purpose and the level etc. in intelligent characteristic are devised.However, it is not considered whether concept has been adapted concretely, in the artificial material, which exists right now. In this research, the artificial material is picked up concretely and adaptability of concept is shown.In addition, this paper proposes the fact that it improves intelligent characteristic in the intelligent lighting system, which is in under development. 1 Judge はじめに 最近のシステムは, 「 インテリジェント化」が定着し ており,高レベルな技術が求められている.本研究室で は,現存する人工物が性能を上げ,ユーザの利便性を向 Sense 上し,環境親和性を高めるための,知的という概念を考 Act 案している.さらに,知的性における意味,目的,水準 Fig. 1 知的人工物における知的構造 なども考案されている.しかし,存在する人工物におい て,具体的に概念が適応されているか考察されていない. センサによって得られた環境変化に関する情報を基 本発表では,人工物を具体的に取り上げ,概念の適応 に人工物のパラメータを変えるには,判断のための基準 性を示す.また,開発中の知的照明システムにおいて, が必要である.この基準が人工物の設計者もしくは利用 さらに知的性を向上させた新たな照明システム案を提案 者によって与えられる知的人工物は最も水準の低いもの する. 2 と考えることができる.これをレベル -1 とする.レベ ル -1 では,与えられた判断基準は一通りしかなく固定的 知的人工物の定義 である.例えば,人感センサーによって開閉する自動ド 人工物は人為的に作られた「もの」の総称である.本 アは,判断基準として熱線量しかなく,ある一定の熱線 研究では,その中でも,建物,機械,自動車,航空機, 量を超えると開閉し,判断は固定であるため,レベル -1 計算機,通信網といった工学的人工物を対象とする.こ の知的人工物であると考えられる. れらの人工物は明確な目的を持ち,その機能や性能が評 設計者や利用者が与える人工物の下位の目標によって, 価できるからである. 複数ある判断基準の中から適切な判断基準が自動的に導 人工物が利用者を含む広義の環境条件の変化に対応し 出あるいは選択される場合,その知的人工物はレベル -2 て自身のパラメータを自律的に変化させるには,その環 とする.また,学習機能を持った知的人工物は,学習に 境条件の変化をセンスするための各種のセンサが必要で より判断基準を複数個作成し使い分けると考えることか ある (認知:Sence).次に,センサで得た情報を基に人工 ら,レベル-2 の知的人工物である. 物の機能や性能を最適化する計画を立て (判断:Judge), さらに,設計者や利用者が上位の目標を与えれば,複 それに沿って人工物のパラメータを変化させること (動 数ある下位の目標の中から適切な下位の目標が自動的に 作:Act) ができなくてはならない.この3つの要素は 導出あるいは選択されるならその知的人工物はレベル -3 Fig. 1 で表すことができる. 3 である.知的性質の水準を Fig. 2 に示す. 4 知的人工物の水準 具体例の解析 4.1 人工物の知的性質の水準,すなわち,賢さは,判断動 作のための基準の設定を階層構造として考えることがで 資料の収集 本研究では,解析する資料対象として特許データベー きる. スを利用している.具体的には,特許庁発行の広報や企 1 Act:センスした情報はサーバーに送信されているため, PDA,携帯電話,PC で情報を閲覧できる. 最終目標 これらから,判断している要素がないため,知的人工物 下位目標 Level-3 ではない. 解析:知的性質の動作からもわかるように,判断基準が 判断基準 存在しない.例えば ,ショッピングセンターなどの大型 Level-2 の駐車場にて,車を探すのは困難である.この時に,携 Judge 帯電話で知らせてくれる機能がある.これは,車両のエ Level-1 ンジンを停止しようとすると,常に現在位置を記憶しま すか,とカーナビが問い掛けてくる.そして,記録する とサーバーに情報を送信する.その結果,携帯端末など Sense Act で情報が閲覧できる.よって,知的性質としては,レベ ル -0 である.もし ,車両が停車を感知して駐車と判断 し ,サーバーに送信してくれれば ,判断要素が生まれ, Fig. 2 知的性質の目標と判断基準 知的人工物となる. 業発行の技術情報を インターネット 上で情報を公開し 【例 2 】LV − 1 インテリジェント パークアシスト 提供している野村総合研究所による特許情報・技術情報 会社名:TOYOTA サービス「 NRI サイバーパテントデスク」を利用し,公 商品の概要:新型プリウスに世界で初めて搭載された自 開特許を検索対象としてキーワード 検索することにより 動バック装置である.縦列駐車,車庫入れをアシストし 情報を収集している. てくれる.駐車スペースをセンサで認識しながら,車の 角度や位置に応じて,運転手に音声で知らせてくれる. 4.2 調査例 音声と共に,自動でハンド ル操作を行ってくれる. 人工物の知的性に関する情報を収集し,詳しい解析を 知的性:現在位置と駐車位置を暗視カメラによりセンス 行った.ここでは,その中から 3 件について示す. する.ハンドルを何度,左右ど ちらに切り返すかを判断 【例 1 】LV − 0 WILLCYPHA する.後退しながら,ハンドル操作を行い,目的の位置 会社名:TOYOTA に駐車する. 商品の概要:”育てるクルマ”をコンセプトに,TOYOTA 知的化の目的:車両の駐車は困難である.速度によりハ が発売している自動車であり,G-BOOK と呼ばれる情 ンドルの回転角度が変化するからである. さらに,後退 報ネットワークサービスの車載端末を標準搭載している. の駐車であれば ハンド ル操作は,前進時と反対になる. 専用通信モジュールを搭載しており,携帯電話などを接 この負担を軽減するのが目的である. 続する必要なく,ネットワークに接続が可能である. 判断基準:現在位置,駐車位置 知的性:ユーザが,端末を利用してレストランを始めと 知的性質の動作: する趣味・娯楽に関する検索情報を端末に蓄積する.そ Sence:現在位置と駐車位置を 暗視カメラによりセンス する. れらの情報を基に端末が学習を行い,以後ユーザが趣 味・娯楽に関する検索を行った際,ユーザの好みにあわ Judge:ハンド ルを何度,ど ちらに切り返すかを判断す せて候補を端末が教えてくれる.この機能により,全く る. 何も知らない状態から好みを検索することなく,ユーザ 好みの情報を得られるようになる. Act:後退しながら,ハンドル操作を行い,目的の位置 に駐車する. 知的化の目的:車内でどこか行きたい,おいしいものが これらから,知的人工物であることがいえる.しかし , 食べたい,もっと車内で楽しみたい.メールが読みたい, 駐車位置を映像をもとにユーザーが 設定する必要があ 現在位置を人に伝えたいと感じた際に,車両にネット る. そのような点までも車側が,判断してくれるとよ ワークを持たせることによって, 「したい」を現実にする り高い水準の知的人工物となる. ことを目的とする. 解析:知的性質の動作からもわかるように,判断基準と 判断基準:なし なる位置パラメータを認知し ,予め定義された制御ロ 知的性質の動作:Sence:現在位置を GPS によりセンス ジックにより判断し ,プロセス制御という動作をとる. する. その制御ロジックは組み込まれたもので,状況に応じて Judge:なし . 使い分けられることはない.このハンドル操作は,きわ 2 めて複雑な動きは行われているが,知的性質としてはレ バッテリーへの充電を行うところに,レベル -2 の知的性 ベル -1 であると考えられる. が存在する. 【例 3 】LV − 2 ハイブリットシステム 4.3 会社名:TOYOTA 解析結果 商品の概要:電力を動力とするモーターとガソリンを動 現在までの調査では,レベル -1 の知的人工物がその多 力とするエンジンを状況に応じて使い分けることでエネ くを占めている.これらの人工物を人間にとってより有 ルギー効率の向上,省エネルギー,環境問題に対して有 効となるレベル -2 の知的人工物にするには,複数個の判 効である. 断基準を持つ必要がある. 知的性:燃費の良い通常走行時にはガソリンエンジンを また,これまでの調査ではレベル-3 の知的人工物は 使い,低速走行時にはエンジンを停止してモーターを用 発見することはできなかった.レベル -3 の人工物は設 いる.また,パワーが必要な全開加速時には,エンジン 計者や利用者が上位の目標を与えれば,複数の下位の目 とモータを両方用いて,最適なエネルギー効率を実現し 標から自動的に適切な目標を選択または導出するもの ている点が知的である. である.つまり,人工物を操作するユーザの意図を推測 知的化の目的:ガソリンに対する省エネルギー, 排気 して,人工物自身が下位の目標を設定するものである. ガスの減少に対する環境問題を実現する. 例えば,自動車のカーナビシステムでいえば,ユーザが 判断基準:バッテリー充電量,速度,スリップ,ブレー 行き先を映画館と設定した際に,天気や運転パターンか キ・アクセルの踏み込み角度. ら,アクション映画を好んでいるのか,ストーリー映画 知的性質の動作: を好んでいるのかなどの違いを見分け,それに応じて適 切な映画館へと導くような知的動作を行うものが考えら ・停車時 Sence:スピード ・バッテリー充電量をセンスする. Judge:エンジンを止めてよいか判断する. れる.将来的にはこのようなレベル -3 の知的人工物が出 Act:バッテリー充電量が十分であれば,エンジン停止. バッテリー充電量が少ない場合,エンジン運転. また,省エネルギー,ユーザビリティー,ユニバーサ 現するものと考えられる. ルデザインに対するアプローチが多く見受けられた.例 えば,洗濯機に関しては,洗濯物の量をセンスして,そ ・通常運転中 Sence:スピード をセンスする. の量に応じて水量を調節により省エネルギーを図ってい Judge:エンジン・モーターど ちらによる走行を実現す るのかを判断する. る.さらに,最近では斜めド ラム構造に設計して,ユー ザビ リティー,ユニバーサルデザインを実現している. Act:低速時にはバッテリーによる走行を行う. 冷蔵庫に関しても,食材にあわせた温度調節,外部液晶 通常にはガソリンによる走行をすると同時に,モーター から内部情報が確認できることにより省エネルギーを実 動力でバッテリーを充電を行う. 現している.また,食材の重さに適応して,収納場所が 設計されており,ユーザビリティー・ユニバーサルデザ ・全開加速時 インを実現している. Sence:スピード をセンスする. このように,現在の人工物は「省エネルギー」「 , ユー Judge:エンジン・モーターを両方利用するか判断する. Act:エンジン・バッテリーを両方利用して,フルパワー ザビ リティー」「 , ユニバーサルデザイン 」の向上がキー を実現する. ワードとして挙げられている.さらに,レベル -1 の知的 人工物が普及し,レベル -2 の人工物へ動向していること ・雪,雨道での走行 から,本研究室が定義する知的の概念を用いて,上記の Sence:前輪のセンサーにおいてタイヤのスリップ状況 をセンスする. 3 点を実現することが望ましいと考えられる. Judge:後輪モーターを稼動走行するか判断する. Act:後輪モーターを駆動して,4WD にする. 5 ・減速時 知的照明システムへの適応 知的照明システムは,蛍光灯を自律分散制御すること Sence:ブレーキ・アクセルの踏み状況をセンスする. により,適応的に照度をコントロールするシステムであ Judge:制動エネルギーが発生しているか判断する. り,実現に向けて開発されている. 現在,タッチパネル・携帯電話・音声認識など 様々な Act:モーターにより,バッテリー充電をする. 解析:抵抗力に従って判断基準を変化させることで適切 インターフェイスの開発が行われており,知的照明シス な動きをとる.速度により,単純に走行方法を変化させ テムは高度な知的化が図られている. 社会における人工物の動向を調査しながら,さらに知 るのではなく,抵抗力を考慮した走行方法に設定して, 3 認識できる知的照明システムを提案する. 的なシステムとする必要性がある.前節までで調査した 現在,知的照明システムはタッチパネル,携帯電話, 人工物の解析結果を基に,知的照明システムが最新シス テムとしてさらにどのような機能が必要であるかを提案 音声認識による制御を開発中であり,ユーザビリティが する. 向上している.しかし,インタフェースが多く存在する 5.1 と操作性で多くの知識を身に付けなくてはならない.し 省エネルギーを考慮した知的照明システム たがって,このようなインタフェースを統合した新たな 近年,環境問題への取り組みが高まり,省エネルギー インタフェースを提案する. への取り組みが重要視されている.照明の分野にも省電 SONY が開発したペットロボット AIBO が発売され 力を考慮した開発が多く見受けられる.したがって,知 ている.AIBO は,音声認識,画像認識,位置認識など 的に省エネルギーを行う照明システムを提案する. が可能である.したがって,AIBO をインタフェース統 現在,我々の研究室が開発している知的照明システム 合マシンとすることで,操作性の問題が解決できると考 は,蛍光灯を利用している.最近,省電力である LED える. .下記に知的性の動作の一例を示す. を利用した照明が開発されている.LED の寿命は照明 用に使われる高輝度 LED や白色 LED で約 4∼6 万時間 • Sence : AIBO に搭載の音声センサーにより,音声 データをセンスする. であり,白熱電球の約 40 倍、蛍光ランプの約 7 倍の寿 命と言われている.しかし,蛍光灯に比べ照度が少ない • Judge : 音声認識により,照明を明暗したいのか判 などの問題点もある. この LED を利用して省エネルギーをはかると共に, 断する. 焦光点が適応的に変化する知的照明システムを提案す • Act : 明るくというと明るくなり,暗くといったら る. 暗くなる. 家庭やオフィスの照明は,部屋全体を明るくするため に広い範囲に照度が保たれる設計となっている.もし , 6 手元を明るくしたい時は,卓上ライトを利用する.必要 まとめと課題 以上の照度を利用しているなど ,非効率である.LED 本研究では,社会における人工物が知的性に属してい ランプをコンピュータ制御により,焦光点を調節し,部 るのかを調査し ,レベル-1 の知的人工物が多くを示し 屋の照明がスポットライトのようにピンポイントを照ら ていることを示した.また現在,レベル -1 の知的人工 すことにより,さらなる省エネルギーを可能とする.下 物は,省エネルギー,ユーザビ リティ,ユニバーサルデ 記に知的性の動作の一例を示す. ザインに対するアプローチを考慮している.この結果か ら,知的に上記の 3 点を考慮した知的照明システムを提 • Sence : 音声センサーにより,ユーザの音声をセン スする. 案した. 現在,人工物における知的人工物の考察データを増や すことと得られた解析から知的照明システムへの適応案 • Judge : ユーザがど のような照明パターンにした を提案している.2 点の適応案を提案したが,いずれに いのかを判断する. おいても実現性に問題があり,良い案と考えられない. • Act : プレゼンモードになった場合,スクリーン周 辺の照明を消灯する.人間がいる場所は,部屋全体 今後,実現性を考慮した適応案を考えていく. を照らしていた照明がスポットライトのように,人 間の手元を照らす.また,必要な場合は,消灯した 参考文献 照明が角度を変化させて,部屋全体の照度をカバー 1) 三木光範, 進化する人工物, オーム社出版局, 1999 日 本機械学会論文集「第 8 回設計工学・システム部門」 する. 5.2 No.98-32, pp253-256(1998) ユーザビリティを考慮した知的照明システム 高度経済成長時など における,若くて行動に制約の 2) 三木光範, 廣安知之, 香西隆史, 「 知的人工物にお ない大人を基準としてきたわが国のものづくりを反省 けるシステム知能の水準について 」, 日本機械学会 し,最近各分野において,ユニバーサルデザインの視点 論文集「第 8 回設計工学・システム部門」No.98-32, からの設計や基準の見直しが活発になってきている.ま pp253-256(1998) た,ユーザビ リティの向上をはかり,ユニバーサルデザ インへと導かれている例も数多く存在する.したがって, 3) 野村総合研究所, NRI サイバーパテントデスク http://www.patent.ne.jp ユーザビリティを考慮し,ユニバーサルデザインとして 4
© Copyright 2026 Paperzz