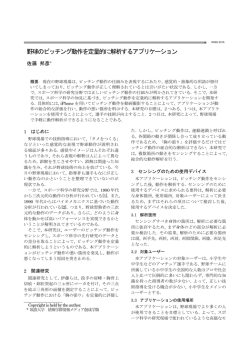
Kinect を用いた人体の関節位置情報取得システム 信州大学 工学部 情報工学科 井澤研究室 08T5044B 佐別当 義剛 1. まえがき 用の信号処理プロセッサ,ユーザ追尾用の自動チルト 近年,モーションキャプチャ技術はテレビや映画, 機構が内蔵されている. ゲーム等の映像制作分野に留まらず,スポーツ科学や 2-2 奥行き方向距離画像の取得 医療等の領域にも幅広く利用されつつある.しかし, 図 2 に,奥行き方向の距離画像を抽出する原理を示 従来のモーション・キャプチャシステムは一般に高価 す.本体前部に設置された赤外線照射機からレーザ光 であり,計測のための特殊なマーカーを必要とするな を照射すると,対象物表面の凹凸による乱反射により, ど,撮影環境等に様々な制約がある.一方,ゲーム用 スペックルパターンと呼ばれるドット状の斑点(一種 の入力デバイスとして開発された Microsoft 社の の干渉縞)が発生する.このパターンを赤外線カメラ 『Kinect』は,ユーザの体に特殊なマーカーを装着す を用いて読み取り,内蔵した信号処理用プロセッサを ることなく,人体の各部位を識別して姿勢を推定する 用いて,事前に取得したパターンのデータベースと比 ことにより,骨格の動き(スケルトン・トラッキング) 較・照合することにより,画面内の人物等の距離画像 をリアルタイムに計測することができる.最近は,一 を取得している. 般的な PC (Windows)に接続して利用する基本ソフト (ミドルウェア・ライブラリ)が公開されている[1][2]. 今回,簡易型のモーション・キャプチャシステムを目 指し,『Kinect』が取得した人体の関節を含む各部位 の 3 次元情報をリアルタイムに抽出するソフトウェ アを開発し,奥行き方向の精度等について評価した. 2.『Kinect』とは 2-1 概要 Kinect は,2010 年に Microsoft 社によって開発さ 図2 距離画像の抽出原理 れた非接触式のゲーム用コントローラであり,人物の 動作をリアルタイムに計測することができる. 2-3 人体の各部位の識別と計測 Kinect では,人体の肘,肩,膝の関節や頭,手, 足等の各部位を識別し,それらの 3 次元座標を計測し ている.その詳細は明らかにされていないが,事前に 人体の各部位の形状やサイズ,姿勢に関する膨大な量 の人物画像サンプルを機械学習させることにより,認 識基準データを作成する.このデータと取得した距離 画像を比較することにより,人体の各部位の認識,識 図1 Kinect の外観 図 1 に示すように,本体には RGB カメラ,赤外線 照射機,赤外線カメラの 3 つの光学系素子が組み込ま れており,その他音響センサや3軸加速度センサ,専 別を行っているものと考えられる. 3.関節位置情報取得システムの開発 今回のプログラム開発には,OpenNI,Primesense, OpenCV,Visual Studio2008 を使用した. プログラムを起動すると,画面内の距離画像から人 物の形状を探索して,その ID を登録し追跡する.次 に人体の各部位を認識し,その関節を含む骨格(スケ ルトン)とその 3 次元座標から,人物のジェスチャを 検出する.人物が規定のポーズをとると,関節等の位 置情報をファイルに出力しながら,対応する距離画像 上 ( DrawDepthMap ) に そ の 骨 格 を 描 画 す る (DrawLimb).検出可能な部位は頭,胸,両肩,両 肘,両手,両臀部,両膝,両足の 15 箇所であり,取 得した 3 次元データを OpenGL を用いて 3 次元表示 するソフトウェアも別途作成した. 図 3 に,スケルトントラッキングの動作例を示す. 30 フレーム/秒の処理速度が得られている.計測に 図4 奥行き方向の計測精度 使用した PC の仕様は以下の通りである. ・OS Windows7 Home Premiun ・CPU Intel(R) Core(TM) 2 Duo E8200 ・メモリ 2GB 5. まとめおよび今後の課題 『Kinect』が取得した人体の関節を含む各部位の 3 次元情報を取り出すプログラムを開発し,奥行き方向 の精度等について評価した.今後の課題としては, ① 検出可能な関節部位の追加 ② フレームレートの更なる向上 ③ 複数人物の同時認識 が挙げられる. このシステムに更なる改良を加えることにより,ス ポーツ科学,例えば当研究室で行っているマラソンの 走行フォームの評価等にも導入できるものと考えら れる. 参考文献 図3 スケルトン・トラッキングの動作例 [1] 中村薫「Kinect センサープログラミング」 (ゲッシュ) 4. 計測精度の評価 Kinect の奥行き方向の計測精度を評価するため, 距離 1~4m の立ち位置における計測値をプロットし た.その結果を図 4 に示す.±3cm 程度の誤差がある が,その原因としては,体の中心軸の判定のぶれが考 えられる. [2] Interface, pp85-101, Jan. 2012 (CQ 出版社) [3] http://d061333.web.fc2.com/index.html
© Copyright 2026 Paperzz