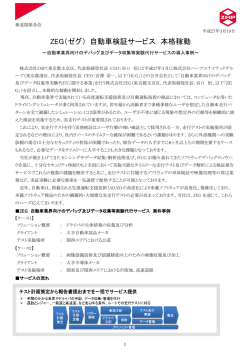
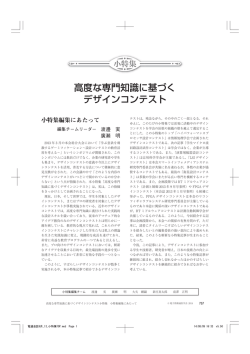
報道関係者各位 2012 年 6 月 27 日 株式会社ゼットエムピー 超高速小型組込みオプティカルフローセンサモジュール スターターキット販売開始 -死角に入った車両や障害物の検出に。アルミケース・スタンドのセットですぐに利用可能- 株式会社ゼットエムピー(東京都文京区、代表取締役社長:谷口恒)は本日、超 高速小型組込みオプティカルフロー(相対速度検出)センサモジュール 「e-nuvo OpticalFlow-Z スターターキット」の販売を開始しました。OpticalFlow-Z は、カメ ラ・FPGA・メモリを一体とした 5cm 角の組込みセンサモジュールで、FPGA にて実 装したオプティカルフローにより最大 240fps の高速計測が可能です。自動車・超 小型車や次世代モビリティ等の移動体において、死角に入った車両や障害物を検 知するといった用途に使用可能です。スターターキットは、このセンサモジュールに、 アルミケースとスタンド(吸盤付き雲台)をセットにしたもので、車両や機器への搭載、 計測方向の調整が行いやすく、研究開発において利用しやすくなります。 価格 は一般 32 万円(税別)/アカデミック 22 万円(税別)で、本日より受注を開始いたし ます。 超高速小型組込みオプティカルフローセンサモジュール e-nuvo OpticalFlow-Z スターターキット http://www.zmp.co.jp/e-nuvo/jp/of-z.html#s tarterkit e-nuvo OpticalFlow-Z スタータキット 【カメラ一体・組込み小型センサモジュール】 50mm×50mm、約 19g の基板にカメラ、FPGA、 CPU、メモリを搭載。PC を用いずに、オプティカ ルフローによる最大 240fps の高速計測が可能。 【アルミケース・スタンド】 アルミケースによりキズやホコリなどから基板を 守ります。吸盤付きスタンドでガラス面や机、機 器の壁面等への装着が可能です。また、自由雲 台により、計測方向を自由に調整可能です。 図 実車実験の様子(後方からの追い越し車両を検出し赤色で表示) 1/2 【用途】 ・自動車メーカ、自動車関連メーカにおける相対速度検出センサとして - 死角に入った車両や、並走・追い越し車両用の検出 - 歩行者や障害物の検出 ・福祉車両、農業機械、などその他車両における予防安全センサとして - 歩行者や障害物の検出 など ・ロボット・移動体におけるモーション検出センサとして -回転角度や移動速度の検出 など 【主な仕様】 フレームレート:最大 240fps マイコン:ARM Cortex-M3 120MHz メモリ:1Gbit/128MB DDR3 SDRAM フラッシュメモリ:64Mbit/8MB インタフェース:CAN/USB/LVDS サイズ/重量: (基板のみ)50×50×19mm/約 19g (ケース付き)82×70×24mm/約 90g (スタンド):φ65×85mm/約 90g 【価格】 e-nuvo OpticalFlow-Z スタータキット 一般 32 万円/アカデミック 22 万円(税別) <内容> -OpticalFlow-Z モジュール ×1 -LCD ディスプレイ ×1 -専用ケーブル(USB) ×1 -電源ケーブル ×1 -評価用ソフトウェア(ビューワ) ×1 -専用アルミケース ×1 -スタンド(吸盤付き雲台) ×1 【本件に関するお問合せ】 株式会社ゼットエムピー 営業部 TEL: 03-5802-6901 / FAX: 03-5802-6908 E-Mail: [email protected] 【株式会社ゼットエムピー】 http://www.zmp.co.jp/ 本社:文京区小石川 代表取締役社長:谷口 恒 私たちは、次世代モビリティの安全・環境・省力化に貢献する 企業を目指します。10 年以上にわたるロボット開発と 4,200 台 RoboCar® 1/10 RoboCar® MV RoboCar® HV の販売実績をベースに、「次世代自動車の開発用プラットフォ ーム」、「ロボット・移動制御技術のライセンス」、「センサ・画像認識ソリューション」、「リチウムイオン電池システム」、 「大学、企業のエンジニア研究用・教育用ロボット」の、5 つの事業を展開しています。創業は 2001 年 1 月文部科学 省傘下の科学技術振興機構から技術移転を受け設立。日本ロボット学会実用化技術賞、経済産業省「今年のロボ ット大賞 最優秀中小・ベンチャー企業賞、中小企業基盤整備機構理事長賞」など数多くの賞を受賞。私たちはこ れからも、ロボット技術やサービスで、イノベイティブな製品を生み出してまいります。 * RoboCar はゼットエムピーの登録商標です。 2/2
© Copyright 2026 Paperzz