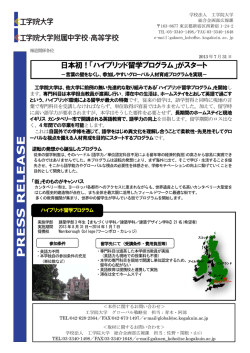
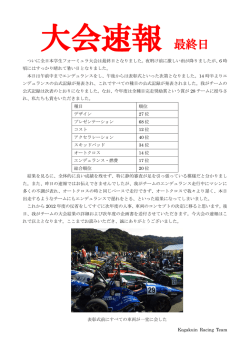
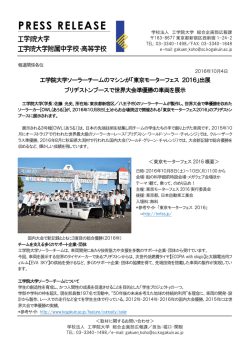
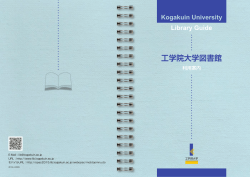
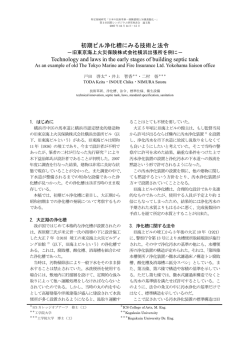
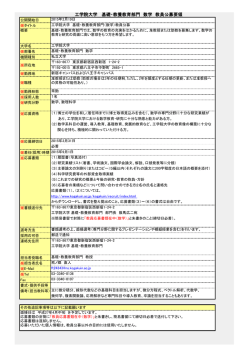
研究題名 分野:計測・制御,自然科学 動作時筋張力を再現できる 屍体実験装置の開発と応用 桐山 善守 工学部 機械システム工学科 准教授 キーワード: 動作時筋張力,生体内負荷,関節モーメント, 概要 骨・軟部組織により構成されたヒトの構造・運動原理を明らかにするには,屍体実験は欠かすこと ができない.本屍体実験装置は,動作時筋張力を負荷することのできるアクチュエータをコン ピュータにより制御することで,生体内での骨運動を屍体標本で実現することができる.この実験 装置では,筋に模したワイヤを計測対象の筋付着相当位置にとりつけ,さらに位置・向きを変更で きるプーリーを用いて,筋の生理的荷重方向を実現できる.一つのアクチュエータは,最大100 Nま での筋張力を発揮することができ,0.1 Nの分解能で制御できる.対象となる組織ごとに筋付着位 置を固定する治具を用いることで,腰椎や頭部を含む頚椎,肩関節や肘・手関節などを対象にする ことが可能である.また,同様の原理でアクチュエータを変更すれば,より低負荷な実験装置として 手指部も対象となり,静的な力学モーメントを負荷することで膝や足部など荷重関節への適応も可 能である.本装置は,新鮮屍体腰椎を用いて妥当性を評価しており,日常の単純動作である前屈 30°,側屈20°,回旋10°時の各椎骨の運動を計測した.医用画像とは異なり,椎骨の運動を直 接計測できるため,計測精度と信頼性も高く,他部位への応用が期待される. アピール ポイント 屍体実験であるため,入力となる荷重や変位状況が明らかであり,結果として得られる屍体の運 動などとの関係を定量的に明らかにすることができる.生体内負荷を再現できるため,切離や術式 の違いも比較できる.侵襲的な条件設定と直接的な計測が可能という屍体実験ならではの特徴に 加え,生体内力学負荷を再現できるという特徴を併せ持っており,従来の単純負荷実験に比べて 得られる情報量とその質は極めて高い.本実験装置は,整形外科だけでなく,形成やリハビリ領域 に対しても有効な実験装置となりうる. 利用・用途 応用分野 ●胸腰椎,●頭部を含む頚椎,●肩・肘・手関節,●手指による把持,●股・膝・足関節, ●足部変形,●人工関節評価,●術式の比較等 (b) (a) 関連情報 (c) (a) 屍体実験装置(全高1600 mm, 床面積600×600 mm2) (b)(c) 屍体腰と計測用マーカの設置 (d) 前屈時の各椎骨の運動 相対角度[°] 相対角度[°] 相対角度[°] 関連論文 p 10 L1 前屈 側屈 回旋 0 -10 10 L2 10 0 0 -10 10 -10 10 L4 0 -10 L3 L5 0 0 10 20 時間[sec] -10 0 10 20 時間[sec] (d) ●関連論文 =桐山善守, 山崎信寿他, ”模擬筋駆動型屍体実験装置を用いた全腰椎の筋負荷挙動”, バイオメカニズ ム, 18, 241-250, 2006 Kiriyama, Yamazaki, et al., “Movements of the whole lumbar spine reproduced by a dynamic muscle active simulator for cadaveric experiments”, 52th ORS, P1309, 2006 ●関連 URL =生体計測制御研究室 http://www.mech.kogakuin.ac.jp/ms/reserch/detail_kiriyamalab.html 工学院大学 総合研究所 研究推進課 東京都八王子市中野町2665-1 〒192-0015 TEL:042-628-4940 FAX:042-626-6726 E-Mail:[email protected] URL:http//www.kogakuin.ac.jp
© Copyright 2026 Paperzz