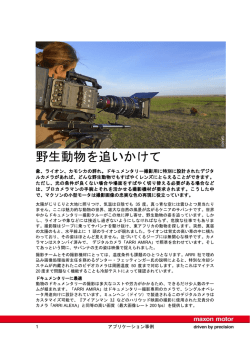
© 2014 ビーレフェルト大学 6 本足の知能ロボット 巨大な昆虫のような外観をしたこのロボット- これは、ナナフシにヒントを得て開発された 「Hector」(HExapod Cognitive auTonomously Operating Robot)です。Hector は柔軟に動 く関節と非常に軽量な外骨格を持ち、6 本の足に装備されたマクソン製ドライブシステムによって 滑らかに移動します。 Hector が障害物の上を慎重に進んで行く姿は他のロボットにはない優雅さがあります。6 本足で走行するこ のロボットは、アクセル・シュナイダー教授博士率いるビーレフェルト大学研究グループ「バイオメカトロ ニクス」がナナフシを見本に開発したもので、大きさは実際のナナフシの約 20 倍。全長はおよそ 90 cm と、ナナフシより並外れて大きいサイズとなっています。このプロジェクトは、ナナフシの走行動作をより 良く理解することで、その根本的な連係動作の仕組みを技術的なシステムに応用することを目指していま す。さらにこの研究チームでは、弾性的動作のロボットシステム制御のための基本的概念を研究したいと考 えています。 このロボットの外骨格には炭素繊維強化プラスチック(CFRP)が使用されており、このため非常に軽量で す。駆動部品と脚部セグメントの接続要素はすべてアルミ合金製で、設計および製造はビーレフェルトで行 われました。重量 12 kg のこのロボットのユニークな点は、生物学的にインスピレーションを得て、非常に 多くのセンサを装備し、分散型制御の原理で動作することです。その特別に開発されたドライブシステムと 触覚センサにより、走行しながら地面の状態に柔軟に対応することが可能です。現時点では、Hector は小さ い起伏のある地面の上を歩いたり、段差などの低めの障害物の上をスムーズに進むことができます。 1 本の足に 3 個のマクソン製モータ この走行ロボットの足にはそれぞれ 3 つずつ関節があるため、同時に 18 箇所の関節の動きをコントロールしなけ ればなりません。このため、1 本の足にはブラシレス EC 45 フラットモータがそれぞれ 3 個ずつ取り付けられてい ます。この 50 W のパワーを持つドライブシステムには、側面に接続基板がない特別な仕様が施されています。18 箇所の足の関節は、生物学的な動きから着想を得た制御アルゴリズムによって制御されます。そのために必要とな る制御機能付きの駆動用電子回路は、ドライブシステム内に埋め込まれています。また、ドライブを弾性的にする 1 アプリケーション事例 ために、特別に開発されたエラストマカップリングがドライブシステムに直接取り付けられています。研究チーム にとっては、超小型、低質量、高トルクのモータを使うことがこのプロジェクトのカギとなっていました。「ま た、モータの長さもできるだけ短いものでなければなりませんでした。様々な要素が関係してきますが、足の動作 範囲はドライブシステム全体の長さによっても大きく制限されます。このような理由から EC 45 flat 50 W の採用 を決めたのです」と研究チームの技術スタッフであり、Hector の開発者・製作者でもあるヤン・パスカルバイト氏 は説明しています。 単純な知的動作 Hector は昆虫と比べると知能的にはまだまだ劣っているかもしれません。しかし足の動きひとつをとっても、 Hector は既に複雑なセンサデータの処理を行っています。そのおかげで Hector は一人で歩行し、障害物に応じた 対応ができるのです。「昆虫程度の知能が備わっていることは否定できない事実です。これと同じように、Hector は単純な知的動作が可能であると言うこともできるのではないかと私たちは考えています。知的動作には多くの側 面がありますが、例えば、今の状況をもとに次の行動を計画する、ということもそのひとつです。現在、一段階高 度なロボット制御の最初のバージョンを試験中ですが、これはロボットに次の行動を計画する能力を与えるもので す。これによって、ここで言う知能はいくらか向上することになります」とパスカルバイト氏は言います。ビーレ フェルトのエクセレンスクラスタ「認知相互作用テクノロジー」内の共同プロジェクトにおいて、この走行ロボッ トは 2017 年までに他の様々な能力を身につけることが予定されています。 maxon EC 45 flat(50 W) 直径 45 mm のブラシレスフラットモータ EC 45 flat は 50 W の出力を発揮します。また、高トル クながら小型で、狭い取付けスペースにも対応 します。 電子回路が統合されたドライブユニット この走行ロボットの足にはそれぞれ 3 つずつ関節がある ため、同時に 18 箇所の関節の動きをコントロールしなけ ればなりません。電子回路が統合された柔軟なドライブ ユニットが足 1 本に 3 台ずつ装備され、足の動きを制御 します。 文章:アンニャ・シュッツ(maxon motor ag 編集部) 2 アプリケーション事例 詳細については下記までお問い合わせください: maxon motor ag Brünigstrasse 220 Postfach 263 CH-6072 Sachseln,Switzerland Tel: +41 41 666 15 00 Fax: +41 41 666 16 50 インターネット: www.maxonmotor.com Twitter: @maxonmotor Universität Bielefeld(ビーレフェルト大学) Exzellenzcluster Kognitive Interaktionstechnologie Prof. Dr. Axel Schneider Zehlendorfer Damm 201 DE-33619 Bielefeld Tel: +49 521 1066564 インターネット: www.cit-ec.de 歩行ロボット Hector の動画: https:/ /www.youtube.com/watch?v=9pbqSrXLKGI マクソンのタブレットマガジン「driven」では、マクソンモータの非常に興味深い使用例をご紹介 しています。「driven」は、App ストアまたは Google Play ストアから無料でダウンロードできます。 3 アプリケーション事例
© Copyright 2026 Paperzz