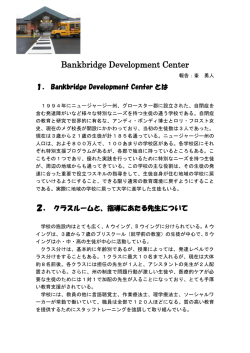
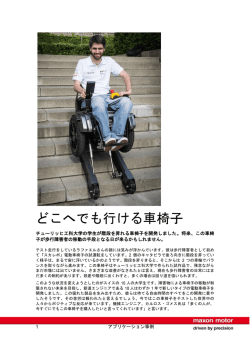
写真 ©Carnegie Mellon University 突然の 月面探索ブーム 地球の小さな隣人、月。もう何十年もの間、月に大きな関心が向かうことはありませんでした。 し かし今、学術界は再び月に注目しています。 今後数年間だけでも複数の月面着陸ミッションが予定 されています。また米国のある大学は、ミニ・ローバーの開発でこの流れに先んじています。 まるで月はその輝きを失ってしまったかのようでした。 1970 年代初頭の NASA による有人ミッションの終了 後、宇宙飛行に携わる各国の当局は 国際宇宙ステーション ISS、火星、銀河探査などに優先順位を移していっ たのです。 しかしそれから 40 年が経過した今、月は再び注目の的となっています。 中国、日本、インドとい った国々は既に月面着陸を実行したり、または今後数年内にローバーミッションを敢行する計画を立てていま す。 しかし、ある小さな企業が、こうした国々を追い抜くかもしれないのです。 Google XLunar Prize 獲得を見据えて 米国ピッツバーグを拠点とする新興企業、Astrobotic Technology 社。同社は 2016 年の夏、1 機のランダーと小 型ローバーを月へ送る予定です。 この計画が成功すれば、ちょっとしたセンセーションとなることでしょう。 なぜなら、これは月における初の民間組織による宇宙ミッションとなるからです。 さらにこれにより、 Astrobotic 社は Google 社の月面無人探査機コンテスト「Google Lunar XPRIZE」(GLXP)でも優勝が見 込まれます。 このコンテストでは、誰よりも先に月面に着陸し、500 m を走行してビデオ映像を地球に送るこ とができた民間企業が、優勝賞金である 2000 万ドルを獲得することになります。 コンテストの〆切は何回か 延長されていますが、現在は 2016 年末が〆切日となっています。 新興企業 Astrobotic 社は、2008 年にロボット工学の専門家ウィリアム・«レッド»・ウィットカーによって設立 されました。同社はカーネギーメロン大学 (CMU) のロボット工学研究所のスピンオフとして設立された会社で、 現在も大学と密接な連携・協力関係にあります。 また同社は、月への安価な物資輸送の実現を長期的な目標と して据えています。 1 アプリケーション事例 ローバーによる洞窟探索 Astrobotic 社の初のミッションでは、自作のランダー「グリフィン」そしてローバー「アンディ」が月面に降り 立つ予定です。 カーネギーメロン大学の研究者および学生から成るグループが作り上げた同機は、洞窟に焦点 を当てた探査を行います。 その理由は、月で発見された洞窟が地下トンネルに続く入口である可能性が学者に よって指摘されているからです。 このような地下トンネルは、将来的に人間が放射線、超小型惑星や気温の変 動などから身を守るための理想的な基地となり得ることでしょう。 ポール・ポジションからのスタート 「アンディ」が Google 社の賞を勝ち取るかどうかは、今後明らかになるでしょう。 Astrobotic 社は、同じく Lunar XPrize に挑戦する他のライバルに有料でランダーの共同使用を提供する計画を立てており、 既に話し合 いを進めています。 このランダー共同使用計画が実現すれば、人類は史上初の月面ローバーレースをこの目で 見ることになります。 しかし現時点では、Astrobotic 社とカーネギーメロン大学は他を圧倒的に引き離し、最 も有利なスタート位置、いわゆるポール・ポジションに立っています。 その証拠として、彼らは Google によ る 2015 年 1 月の中間賞においても「ランダーシステム」「イメージング」そして「モビリティ」の 3 部門で受 賞を果たし、総額 175 万ユーロの賞金を獲得しました。 この際、同チームは自分達の作り上げたローバーが真 空状態および月での過酷な環境においても機能することを証明する必要がありました。 ローバー「アンディ」 は様々なテストで素晴らしい成績を収めています。 「アンディ」に使用されているブラシレスモータ EC-4pole 22 は、同機の原動力の源です。 ロータには 2 つの磁極ペアが 装備されており、非常な高電力密度と高トルクを実現してい ます。 またモータには、過酷な環境条件下での使用に向けて 特別に開発されたプラネタリギアヘッド GP 32 HD が組み合 わされています。 写真(左): 小型の内蔵ドライブユニッ ト。 写真©Carnegie Mellon University 開発者とカーネギーメロン大学の学生は 9 か月間にわたる「アンディ」の開発過程において、安価かつ目的に 適ったローバーを作り上げることに意識を注ぎ、このため多くの標準コンポーネントを採用しました。 4 つの 車輪のドライブシステムとしてはマクソンのブラシレスモータ EC-4pole がプラネタリギアヘッド GP 32 HD と 共に使用されています。カーネギーメロン大学ロボット工学のマスター課程で研究を続ける学生であり、「ア ンディ」プロジェクトの技術責任者であるジョン・アンダーソン氏は「この組み合わせによって、いかなる障 害物をも乗り越えられるであろうトルクを得ることができました」と述べています。 宇宙空間での条件に耐え るため、このドライブには潤滑剤や配線基板に軽微なカスタマイズが施されました。 チームは宇宙プロジェク トにおけるマクソンモータの経験の豊富さを重視しています。 アンダーソン氏は、 「マクソンモータのおかげ 2 アプリケーション事例 で、私たちの仕事はとてもやり易くなりました。月への道のりにはまだ乗り越えるべき障害が幾つかあります が、 モータの問題を解決してくれるマクソンモータのような信頼できるパートナーを得たことは、私たちにと って本当にプラスになっています」と述べています。 ローバー「アンディ」 サイズ: 102 cm 質量: 33 kg(月面上では約 5 kg) 速度: 18 cm /s 最大傾斜: 30° 障害物の最大サイズ: 15 cm 文章: シュテファン・ローシ(マクソンモータ編集者) 詳細については下記までお問い合わせください: maxon motor ag Brünigstrasse 220 Postfach 263 CH-6072 Sachseln, Switzerland Tel: +41 41 666 15 00 Fax: +41 41 666 16 50 インターネット: www.maxonmotor.com Twitter: @maxonmotor マクソンのタブレットマガジン「driven」では、マクソンモータの非常に興味深い使用例を ご紹介しています。 「driven」は、AppストアまたはGoogle Playストアから無料でダウンロード できます。 3 アプリケーション事例
© Copyright 2026 Paperzz