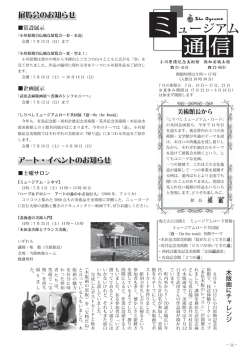
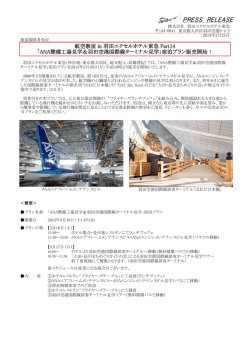
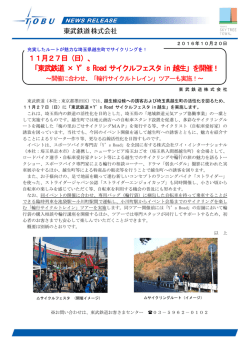
平成 22 年度 日本大学理工学部 学術講演会論文集 E-6 プロジェクタを使った自動車運転支援に関する基礎検討 ○石井恒平 1 清水雅夫 2 A Study on a Drive Support Information Projection System Kouhei ISHII1 and Masao SHIMIZU2 Abstract This study investigates elementary technologies for a car-drive support system by projecting information as a pictogram onto the forward road surface from the car, as if the projected figure were a marking paint on the road surface. The system consists of a projector for the image projection and a camera for the system calibration. The projector presents driving support information such as the car location, the distance to a corner or destination, and a visually-simulated roadblock in case of that an emergency stop is required. Car drivers devote most of their time to watching ahead through the windshield. This indicates that information on the forehand road will attract more attention than the conventional head up/down display in the car console. Experimental results demonstrate effective figure projections for a road surface using a Homography transformation to compensate perspective deformation. 1. は じ め に 自動車を運転するドライバは,その大部分の時間を外 部環境を眺めることに使用している.走行速度,現在時 刻,カーナビゲーションの表示(地図や道路分岐点など) などを注視する時間は,前方を眺めている(必ずしも注 視ではない)時間と比較すると,大変に短い.このこと は,ドライバを含む自動車の搭乗者の目的が短時間で安 全に目的地に到着することであり,自動車の動作状況を 監視することでないことからも,明白である. そこで,もしも外部環境に自車に関する運転支援情報 が提示されていれば,ドライバは特に意識することなく 外部環境から必要な情報を「知る」ことができるように なる.たとえば,目的地に到達するための道路分岐点ま での距離,どちらに曲がればよいか,などが道路に塗装 されているかのように提示されていたら,ドライバは道 路上の記号と同時に,自車に関する運転支援情報を「知 る」ことができる(図 1). 本検討では,自動車に搭載したプロジェクタを使って 道路面に画像を投影することによる,運転支援に関する 基礎的な検討を行った.ヘッドアップ/ヘッドダウンディ スプレイに必要な情報を表示するよりもドライバが注目 する可能性があると考え,外部環境に画像として運転支 援に関する情報を提示する方法を検討した.平面射影変 換を用いて,道路面に各種情報が塗布されているかのよ うな投影を行った. ここで,自動車に (PC) プロジェクタを取り付けるこ とに関して,次のように正当化することができる. ( 1 ) 明るい昼間は,道路面に対するプロジェクタの 投影映像は見えない.しかし,ドライバが目にする情報 は,昼間と比較して夜間の方が圧倒的に少ない.このた め,ナビゲーションを初めとする運転支援に関する情報 は,特に夜間に必要とされる. ( 2 ) 自動車に,プロジェクタを新たに搭載する必要 はない.必ず自動車に搭載されているヘッドライトは, 高輝度で高性能なプロジェクタと考えることができる. プロジェクタは,ヘッドライトへの付加機能として実現 できる. ( 3 ) 自動車に搭載されたプロジェクタは,道路面や 壁面を表示スクリーンとする新たな情報提示装置と考え ることができる.この表示装置を使って,ドライバを含 むユーザや歩行者への情報提示の可能性がある. 2. 装 置 構 成 2. 1 プロジェクタ 図 2 に示すように,同次座標系で表したプロジェクタ 座標系 Ip (xp , yp ) と投影面(道路面)座標系 Id (xd , yd ) の 間には,次式の関係がある [1]. Id = Hp Ip 図 1 道路面に投影した自車運転支援情報. (1) ただし,Hp は 3 × 3 の平面射影変換行列である.また, 投影面は完全な平面と仮定し,プロジェクタレンズの歪 曲収差は無視できるものとする. 321 平成 22 年度 日本大学理工学部 学術講演会論文集 Oc Op (xp , y p ) ( xc , y c ) HP HC Hp-1 ( xd , y d ) 図 2 プ ロ ジェク タ 座 標 (xp , yp ),投 影 面( 道 路 面 )座 標 (xd , yd ),カメラ座標 (xc , yc ) の関係. 式 (1) によって,プロジェクタ座標系で準備した運転 支援情報を表す図形は,投影面では平面射影変換されて 変形する.道路面に初めから塗布されていたかのような 図形を表示するためには,プロジェクタ座標系で準備し た図形をあらかじめ H−1 p を用いて平面射影変換してお き,それを投影面に投影すればよい.ただし,このため には,Hp を求めておく必要がある. 図3 # !" −1 左列は H−1 p で変形しない画像とその投影,右列は Hp で変形した画像とその投影.床面には,投影画像の変形 がわかりやすいように平行線を設置している. 3. 実 験 結 果 2. 2 キャリブレーション プロジェクタにカシオ社製 XJ-SC210 を使用し,キャ リブレーション用カメラに Point Grey Research 社製 FireflyMV を使用した.図 3(a) に示す運転支援情報提示 図形を,800 × 600[画素] の解像度で作成した.前節の方 法でキャリブレーションを行い,Ĥ−1 p で変形した図形 を,同図 (b) に示す. それぞれの図形を道路面(実験では床面)に投影した 結果を,それぞれ図 3(c)(e) および (d)(f) に示す.変形 してからの情報提示(同図 (f))は,ドライバにとってよ り自然な運転支援となることを確認した. 平面射影変換行列 Hp を求めるためには,プロジェク タ座標系で準備した既知の図形と,それを投影面に投影 したときの対応点が 4 点以上あればよい [1].しかし,こ の作業を実際に行うと,道路面に投影された辺々数 m の 図形の位置を測定する必要が生じる. そこで,図 2 に示すように,プロジェクタ座標系に対 して固定されたカメラ座標系を用いる.このカメラで投 影面を撮影すると,プロジェクタ座標系からカメラ座標 系までの関係は,次のようになる. Ic = Hc Id = Hc Hp Ip !" (2) 4. ま と め ただし,Hc は 3 × 3 の平面射影変換行列であり,撮影レ ンズの歪曲収差は無視できるものとする. 式 (2) の Hc Hp は,プロジェクタで投影面に投影する 図形をカメラで撮影すれば,4 点以上の対応点を用いて 求めることができる.また,Hc は,投影面に置いた基準 図形(たとえばレジャーシートなど)をカメラで撮影す れば求めることができる.つまり,カメラを設置して投 影面を撮影するだけで,プロジェクタの平面射影変換行 列を Ĥp = Hc −1 (Hc Hp ) のように求めることができる. なお,カメラは運転室内バックミラーなどに設置でき る.さらに,道路面に対する自動車姿勢変化を無視すれ ば,1 回だけキャリブレーションを行えばよいので,自 動車室内にカメラを設置する必要はない. 本研究では,自動車に搭載したプロジェクタを使って 道路面にテクスチャを投影することによる,運転支援に 関する基礎的な検討を行った.キャリブレーションを行 い求めた平面射影変換を用いて,道路面に各種情報が塗 布されているかのような投影を行った. 今後は,以下の課題を検討する予定である. • 提示情報のアニメーション化. • 提示情報の立体表示化. • 道路面に対する自動車姿勢変化への実時間対応. 322 文 献 [1] 奥富,清水他(編集),“ディジタル画像処理”,CG-ARTS 協会,2004.
© Copyright 2026 Paperzz