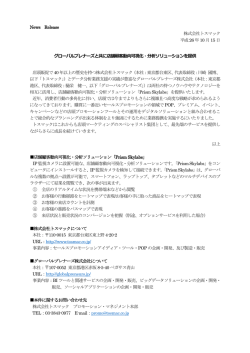
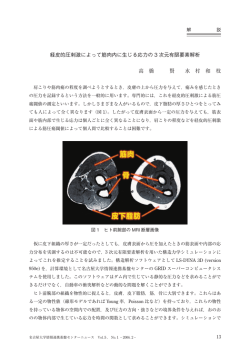
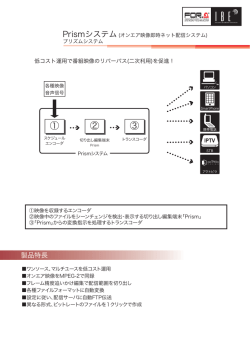
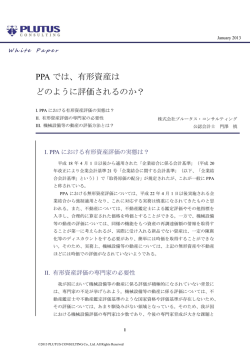
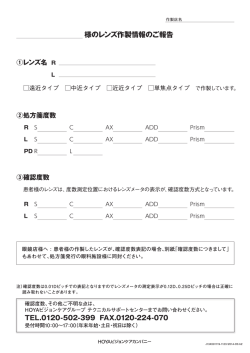
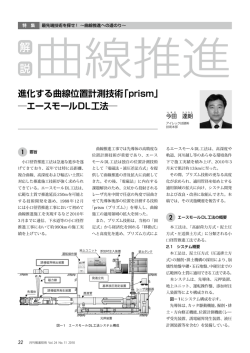
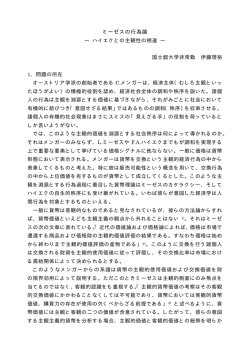
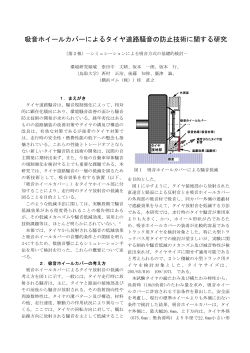
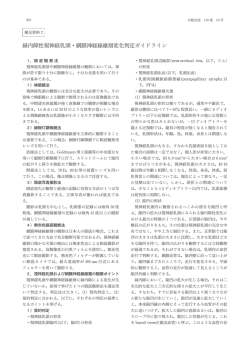
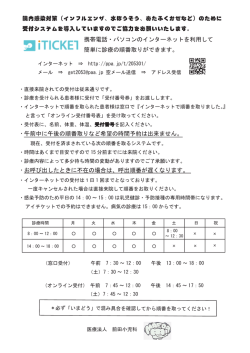
不完全な追跡データに基づく移動経路と滞在時間の確率的推定手法の検討 島﨑彦人 Preliminary Study on a Probabilistic Approach to Reconstructing a Potential Migration Route using Incomplete Tracking Data Hiroto SHIMAZAKI Abstract: Many species of wild animals make migrations over broad spatial scales during their life cycles. To design proper conservation measures for these species, information on their migration routes is of critical importance. However, such information is not readily available because it is difficult to locate a moving object at an adequate spatio-temporal sampling resolution. To address this problem, this study preliminary examined a probabilistic approach to reconstructing potential migration routes using incomplete tracking data. Although the approach leaves much room for improvement, findings of this study suggest promising directions for future research. Keywords: 欠測データ(missing data),時系列構造(time-series structure) ,時空間プリズム (space-time prism),潜在的移動経路領域(potential path area) 1. はじめに 改良したり,新たな測位システムを開発する必要 広範囲を移動して生きる野生動物の保全策を がある.この方策は研究開発の王道と言えるが, 検討するためには,かれらの移動経路を把握する 技術の粋を尽くしても改良や開発には多くの困 ための追跡データが不可欠である[1].追跡データ 難が伴い,費用の制約が発生する恐れもある.こ の効率的な収集手段として,これまで,全地球航 れに対する代替案として,不完全な追跡データを 法 衛 星 シ ス テ ム (Global Navigation Satellite 後処理し,移動経路を復元するという方策が考え [2] [3] Systems;GNSS) や ARGOS システム などの人 られる.この方策は,過去に整備された追跡デー 工衛星系の測位システムが活用されてきた.しか タをも処理対象とすることができる利点がある. し,これらのシステムから得られる追跡データは, 不完全な追跡データから移動経路を復元する 必ずしも計画通りの時間分解能と測位精度を備 手法は,決定論的方法と確率論的方法の2種類に えているわけではなく,欠測や測位精度の低下に 大別できる.決定論的方法では,点と点を直線や ともなう不完全性が問題となっていた. 曲線で結ぶことにより移動経路を表現する.この 追跡データの不完全性の問題を根本的に解決 方法は,移動経路をわかりやすく可視化できる点 するためには,位置精度の高い追跡データを十分 で優れているが,その他の経路の可能性を暗黙の 密な時間間隔で収集できるよう既往システムを うちに無視している点に問題がある.一方,確率 島﨑彦人 〒292-0041 千葉県木更津市清見台東 2-11-1 論的方法では,移動速度 v に関する仮定と時間的 木更津工業高等専門学校 環境都市工学科 Phone: 0438-30-4153 E-mail: [email protected] 制約 |t0 - t1| に基づいて,移動体の到達可能範囲 を特定することにより,2点間を結ぶ未知の移動 経路を面的に推定する [4]-[5] .この方法は,時空間 プリズム[6]の概念(図-1)を基礎としたものであ 2. 方法 り,移動経路の不確実性を表現できる点において 最初に,移動経路の確率的復元手法の基本的な 優れている.しかし,速度や進行方向の変化につ 考え方を整理する.その後,移動経路の推定性能 いての時系列構造を考慮した移動経路推定手法 に対する,追跡データの時系列構造と欠損の影響 の報告例は無く,手法改善のための検討の余地が 評価手法について述べる. 残されている. 本研究は,追跡データの時系列構造を考慮しな 2.1 確率的復元手法の基本的な考え方 がら,移動経路を確率的に復元する手法の開発を ある時刻 t0 に点 L0 で観測された移動体が,そ 目指している.ここでは,追跡データの時系列構 の後の時刻 t1 に別の点 L1 で観測されたとする. 造と欠損が,移動経路の推定性能にどのような影 このとき,観測点 L0 と L1 を結ぶ移動経路上の未 響を与えるのかを検討するための模擬データ生 知点 Lk の存在可能な時空間範囲は,移動速度 v 成手法について報告する. に関する仮定と時間的制約 |t0 - t1| によって規定 される,時空間プリズム(space-time prism;STP) の内部領域に限定される.すなわち, d d STP = ( Lk , t ) | t 0 + 0 k ≤ t ≤ t1 + k1 . (1) v v ここで, d0k は観測点 L0 から未知点 Lk までの距離, dk1 は未知点 Lk から観測点 L1 までの距離である. なお,時空間プリズムを平面投影することにより 潜在的移動経路領域(Potential Path Area;PPA) が得られる.PPA は未知点 Lk の存在可能な空間範 囲を表している. 特定の時間断面 t'(t0 < t' < t1)に移動体が存在 図-1 時空間プリズムの概念図. しうる空間範囲は,観測点 L0 を中心とした半径 R0(= v×(t' - t0))の領域 A と,観測点 L1 を中心 とした半径 R1(= v×(t1 - t'))の領域 B の共通部分 A∩B に限定される(図-2). いま,時間断面 t'(t0 < t' < t1)において移動体 が存在しうる空間上の点を l* と表記し,全ての 点 l*の集合を χ とする.このとき,任意の集合 Y ⊂ χ に移動体が存在する確率: Pt ′ (Y ) = ∫ pt ′ (l )dl , (2) Y を求めることを考える.ここで確率密度関数 pt ′ 図-2 潜在的移動経路領域(PPA)の模式図 は ∀l ∈ χ に対して,l = l*である確率密度を与 えるものとする. Winter and Ying (2010)[5]は,確率密度関数 pt ′ を ここで,式(3)の εt は時点 t における移動速度であ ランダムウォーク理論に基づいて定義した.この り,Weibull 分布に従う確率変数とした(図-3). 方法で求められる確率密度は,2つの観測点を結 また, 式(4)の δt は時点 t における進行方向であり, ぶ直線に沿って高くなると同時に,この直線を軸 von Mises 分布に従う確率変数とした(図-4).St として線対称となる尾根筋状の分布を示した.そ は,状態に応じて 0 か 1 の値をとる. したがって, のため,未知の移動経路を確率密度の高さに基づ 状態 St = 0 の場合には,式(3)は vt =εt (0)となる. いて推定すると,時系列で並んだ観測点を次々に なお,εt および δt の右肩に付した添え字 0 と 1 は,2つの状態に対応して,確率分布のパラメタ 直線で結んだ折れ線となる. これは,たかだか2つの観測点から得られる位 が変化することを意味している.すなわち,St = 0 置と時刻の情報のみを用いて,確率密度を推定し ならば繁殖地,中継地,越冬地などの生息地に滞 ているためである.より現実的な移動経路を復元 在(stay)している状態,St = 1 ならば生息地間を するためには,利用可能なその他の観測点から得 移動(travel)している状態に応じたパラメタを設 られる情報も積極的に活用すべきだろう. 定した. 本研究は,追跡データの時系列構造を考慮する ことによって,より現実的な移動経路の復元を行 う手法の開発を目指している.以下では,追跡デ ータの時系列構造と欠損が,移動経路の推定性能 にどのような影響を与えるのかを検討するため の模擬データ生成手法について述べる. 2.2 時系列構造を持つ模擬追跡データの生成 移動速度や進行方向の変化に時系列構造を持 った追跡データを模擬的に発生させるため,時点 t(=1,…, T)における移動体の速度 vt と進行方向 図-3 θt のデータを,Markov switching model(MSWM) 各状態における移動速度 vt の確率密度関数 (Weibull 分布) [7] を利用して生成させた. ここでは,極東ロシアで繁殖期を過ごし,夏の 終わりに中国南東部に移動する渡り鳥の長距離 移動を仮定する.そして,速度 vt と進行方向 θt は,渡り鳥の状態 St に依存して決まると想定し, 以下の式を定義する. vt = ε t( 0 ) (1 − S t ) + ε t(1) S t (3) θ t = δ t( 0) (1 − S t ) + (θ t −1 + δ t(1) ) S t (4) 0 St = 1 (5) stay travel 図-4 各状態における進行方向 θt の確率密度関数 (von Mises 分布) 3. 結果と考察 Markov switching model(MSWM)[7]を用いて, 時点t(=1,…, T)における移動体の速度vtと進行方 向θtの模擬データを212点発生させた.各模擬デー タの頻度分布を図-5および図-6に示した.2つの 異なる状態がうまく混合しているのがわかる.ま た,移動の初期座標を(50°N,135°E)としたと きの追跡結果を図-7に示した. 図-7 模擬的に発生させた追跡データ(N =212) .状 態 St = 0(stay)の観測点を白抜きの黒丸(〇) , 状態 St = 1(travel)の観測点を塗りつぶし灰色 (●)で示した. 図-5 Weibull 分布に従う確率変数として発生 させた移動速度 vt の頻度分布(N =212) 参考文献 [1] 島﨑彦人・山口典之・樋口広芳.(2009)「衛 星追跡と渡り経路選択の解明」.樋口広芳・ 黒沢令子(編) 『鳥の自然史』第 4 部 12 章, 北海道大学出版会. [2] 土屋淳・辻宏道(2008)『GNSS 測量の基礎』 日本測量協会. [3] ARGOS (2008) ARGOS User's Manual. 50pp.CLS/Service Argos, Maryland. [4] Miller, H.J. (1991) Measuring accessibility using space-time prism concepts within geographic information systems. International Journal of Geographical Information System, 5(3): 287-301. [5] Winter, S. & Yin, Z.C. (2010) Directed 図-6 von Mises 分布に従う確率変数として発生 させた進行方向 θt の頻度分布(N =212) 4. おわりに 今後,生成した模擬データを利用しながら,追 跡データの時系列構造と欠損が,移動経路の推定 性能にどのような影響を与えるのかを検討し,現 実的な移動経路の復元手法の開発を目指したい. movements in probabilistic time geography. International Journal of Geographical Information Science, 24(9): 1349–1365. [6] Hägerstrand, T. (1970) What about people in regional science? Papers of the Regional Science Association, 24(1):7-21. [7] Hamilton, J.D. (1989) A New Approach to the Economic Analysis of Nonstationarity Time Series and Business Cycle,Econometrica,vol.57(2), pp.357-384.
© Copyright 2026 Paperzz