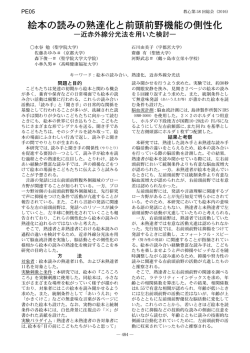
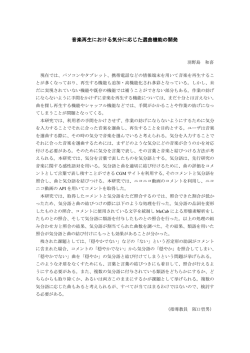
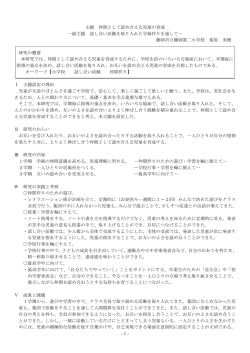
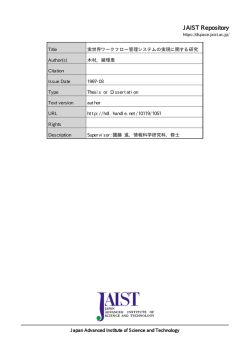
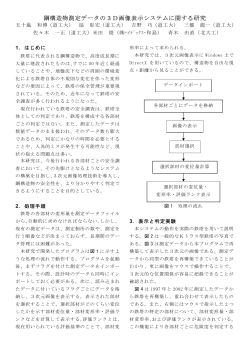
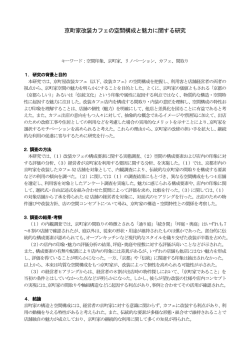
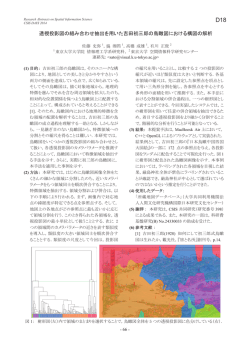
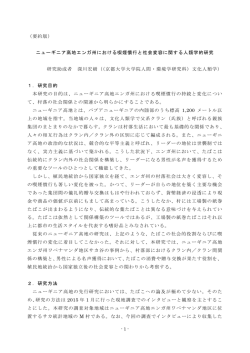
神戸大学都市安全研究センター 研究報告,第19号,平成27年 3 月 都市部における緊急車両のスムーズな走行支援 Support the Smooth Running of the Emergency Vehicle in Urban Area 高木 由美 1) <XPL7DNDNL 南 浩明 2) +LURDNL0LQDPL 木下 敦志 3) $WVXVKL.LQRVKLWD 太田 能 4) &KLNDUD2KWD 玉置 久 5) +LVDVKL7DPDNL 概要:救急車やパトカーなどの緊急車両は、目的地へ迅速に向かうことが要求される。近年、,76 の一分野 として、緊急車両の走行を支援するシステムが研究されている。しかし、システムが、緊急車両の目的地ま での到着時間短縮にどの程度寄与するかを評価している研究は少ない。そこで本研究では、都市部における 交通事故発生時の救急車の走行に着目し、車車間通信を用いた緊急車両走行支援による効果をシミュレーシ ョン実験により明らかにする。走行支援として、緊急車両が自車両の位置・速度などの情報を周辺車両に送 信し、減速、車線変更、交差点の進入禁止を促す方法と、緊急車両が走行予定経路を周辺車両に送信するこ とで、その経路上を走行しないよう促す方法についてシミュレーション実験を行った。 キーワード:緊急車両、車車間通信、,76、6FHQDUJLH まえがき 近年、情報通信技術の応用として,76(,QWHOOLJHQW7UDQVSRUWDWLRQ6\VWHP:高度交通システム)の研究 が盛んに行われている。中でも、緊急車両(救急車、消防車、パトカー、血液輸送車など)の走行支援は、 ,76の重要なアプリケーションとして考えられる。そこで本研究では、緊急車両の中でも最も出動件数の多 い、救急車に着目する。 消防庁の報道発表によると、平成 年に発生し た 交 通 事 故 を 対 象 と し た 救 急 車 に よ る 搬 送 者 は 人、通報から現場到着までの全国平均所 要時間は分で、年々増加傾向にある 。また、 図 に示すように、心肺停止から分以上経過す ると生存率がとなるため 、救急車が消防署を 出動してから病院搬送までの車両走行時間(以下、 救急時間と呼ぶ)の更なる短縮が求められている。 救急時間が長くなる要因としては、 図カーラーの救命曲線 ⅰ緊急車両の走行を優先するために、周辺の一 ― 232 ― 般車両が行うべき、車線変更や減速、停車、経路変更などの避譲行動の遅れ ⅱ緊急車両が、赤信号あるいは信号のない交差点に進入する際の減速 などが考えられる。 ⅰについては、一般車両は、緊急車両への道路避譲が義務付けられている。しかし、車両の遮音性向上 やオーディオの音量によってサイレンが聞こえず、緊急車両の接近に気付かない運転者も多いと考え られる。 こうした一般車両による避譲行動の遅れが、緊急車両の円滑な走行を阻害する要因になっている。 ⅱについては、緊急車両が走行する道路の交差点において、他の道路から車両が進入する可能性を排除 できないため、減速してしまうことが要因になっている。 上記のような緊急車両の円滑な走行を阻害する要因に対して、車車間通信や路車間通信を用いた緊急車両 走行支援に関する研究が行われている ~。 車車間通信を用いた従来研究 ~ では、位置や速度などの情報を含んだビーコン(%60:%DVLF6DIHW\ 0HVVDJH)を定期的に隣接車両同士で交換することで、緊急車両が周辺車両に自車両の接近を早期に伝え、適 切な避譲行動を促すことが考えられている。これにより、救急時間が長くなる要因 ⅰとⅱに対しての 効果が期待される。また、従来研究 では、緊急車両が走行予定経路を周囲の車両に送信することで、周辺 車両に走行予定経路上の道路を通らないように促すことも考慮されている。これにより、事前に走行予定の 経路上における交通量を減少させることで、ⅰの問題を軽減できることが期待される。 路車間通信を用いた従来研究 、では、緊急車両と信号機が通信することによって、緊急車両の 走行予定 経路上の信号機をすべて緑色に変えるというものである。これにより、交差点進入時の減速がなくなり、ⅱ の問題に対する効果が期待される。しかし、信号機と車両の双方の設備を整える必要があることから、コス トを要する。 これらの従来研究は、走行支援システムの提案、パケット配信率および配信遅延などの通信レベルでの性 能評価に留まっているものがほとんどである。そのために、通信レベルでの性能が、システムレベルにおい てどの程度寄与するのかは、明らかではない。また、従来研究 では、車車間通信を用いた緊急車両走行支 援によって、救急時間の短縮をどの程度図れるかの実験を行っているが、直線道路におけるシミュレーショ ンに留まっている。つまり、交差点などが存在し、緊急車両の出動が多い都市部を想定した検証はなされて いない。 上記のような背景を受け、本研究では、通信の頻度や送信範囲といったパラメータが、救急時間にどのよ うな影響を与えるのかを明らかにすることを目的とする。そのため、まずは設置費用の観点から車車間通信 のみを用いた走行支援に着目し、これまで評価されていない都市部における走行支援の効果について調べる。 本研究では、前段階として、シミュレーション環境の構築と通信に関するパラメータを一定としてシミュレ ーションを行い、車車間通信を用いた走行支援の効果を調べる。 では通信について、 ではシミュレーションについて述べる。 では走行支援効果の評価方法につい て、 ではシミュレーション実験の結果と考察について述べる。 通信 :$9( 本 研 究 で は 、 通 信 方 式 と し て :$9( ( :LUHOHVV $FFHVVIRU9HKLFXODU(QYLURQPHQW)を用いる。:$9( プロトコルの構造は、図に示すように、下位層 を ,(((S、上位層を,(((によって規 定されている。,(((Sは、,(((規格 に基づいて車両通信用'6&5( 'HGLFDWHG6KRUW5DQJH &RPPXQLFDWLRQ)を実現することを目指した通信規格 である。そのため、3+<層と 0$&層を規定しており、 接続手順を簡略化することで最大NPKの高速 走行時での通信も可能としている 。 図:$9(の構成 使用アプリケーション 本研究で用いる通信アプリケーションについて説明する。 D %60 %60は、:$9(のアプリケーション層で規定されているアプリケーションのつである。%60パケットに ― 233 ― は、車両の位置、速度、および進行方向などの安全に関する基本的な情報が含まれている。よって、これら の情報を定期的にブロードキャスト(通信可能範囲内の車両に一斉送信)することで、周囲の車両と情報交 換を行う。 E フラッディング フラッディングは、車両が受信パケットを度だけ必ず転送することで、周辺車両に情報を行き渡らせる 方式である。このように単純なフラッディングは、冗長な転送が行われやすい。そのため、冗長な転送の低 減を目指した様々な方式が提案されている 。しかし本研究では、最も単純なフラッディング方式を用いる。 本研究の目的は、緊急車両の走行予定経路を含む情報配信によってもたらされる効果を明らかにすることで あるため、フラッディング方式に関する検討は、今度の課題とする。 アプリケーションの用途 緊急車両は、周囲へ位置情報などを送信することで、周辺車両に早期の緊急車両の検知と避譲行動を促す。 さらに、走行予定経路を周囲へ送信することで、周辺車両にその経路を避けることを促し、走行予定経路上 の渋滞を緩和する支援方法を試みる。事件や事故などが起こったときには、現場付近での渋滞が考えられる ため、緊急車両の走行予定経路上の交通量を制限することは、目的地への迅速な移動に効果的であると考え る。本研究では、位置情報などの送信には%60アプリケーション、走行予定経路情報の送信にはフラッディ ングアプリケーションを用いる。 シミュレーション この章では、本研究で行ったシミュレーションについて述べる。初めにシミュレーションシナリオの概要 について示し、次に車両のモビリティについて述べ、最後にパラメータ設定について述べる。シミュレーシ ョンには、商用シミュレータ6FHQDUJLH0XOWL$JHQW を用いた。 シナリオ 本研究では、緊急車両として最も出動件数の多い救急車に着 目し、交通事故が発生して負傷者が出た場合における走行を想 定する。つまり、出発地である消防署から事故現場を経由し、 病院に向かう一連の走行を考える。シナリオの大きさは、図 のようにグリッド間隔Pの×のグリッド環境を用 いており、右上の建物を消防署、中央の交差点を事故現場、左 下の建物を病院と設定している。また、各グリッド内には建物 があるとし、四隅を除いた各交差点には信号機を配置している。 ポートアイランドを除いた神戸市中央区では、中央消防署、 山手出張所、栄町出張所の計箇所に救急車が配置されてい 図シナリオ環境 る。これらそれぞれの間の距離は、いずれもNP以内であ る。このことから、消防署、あるいは出張所から出動する救急車の消防署所内における行動範囲は、半径 ~NP以内であると予測し、シナリオ範囲をNP四方とした。 モビリティ ここでは、シミュレータ上での各車両のモビリティについて説明する。 まず、6FHQDUJLH0XOWL$JHQWにおける一般的な車両のモビリティについて述べ、次に本研究におけ るシミュレーションでの一般車両と緊急車両のモビリティについて述べる。 D 車両走行モデル 車両の挙動は、道路を走行するドライバモデルのつとして知られている,'0(,QWHOOLJHQW'ULYHUV 0RGHO)に従う。車両は、前方を走行している車両の状態を見て、安全に運転可能な車間距離を維持しなが ら走行する。信号機のある交差点では、信号に従って交差点を通過する。つの道路に複数の車線が存在す る場合、左折は左車線、右折は右車線から行うものとする。さらに、車両は、次に曲がる交差点を考慮して、 交差点の手前で必ず所望の車線に移動する。所望の車線に移動できない場合は、停止して車線変更が可能に なるまで待機する。 ,'0に基づく追従走行モデル、および6FHQDUJLHで用いられている車線変更モデルを以下に示す。 ― 234 ― ① 追従走行モデル 車両は、次式を用いて加速度𝑑𝑑𝑑𝑑 ⁄𝑑𝑑𝑑𝑑 を決定して移動する。 表追従走行モデルのパラメータ また、これらの式で用いられるパラメータ値を表に示す。 項目 値 𝑑𝑑𝑑𝑑 𝑑𝑑𝑑𝑑 𝑣𝑣 𝛿𝛿 𝑣𝑣 = 𝑎𝑎 [1 − ( ̂ ) − ( 𝑑𝑑 ∗ (𝑣𝑣,∆𝑣𝑣) 2 a 最大加速度 ) ] 𝑑𝑑 𝑑𝑑 ∗ (𝑣𝑣, ∆𝑣𝑣) = 𝑑𝑑min + max [0, (𝑣𝑣𝑣𝑣 + 𝑣𝑣∆𝑣𝑣 2√𝑎𝑎𝑎𝑎 𝑣𝑣̂ 所望速度 )] 𝑣𝑣 現在の速度 ② 車線変更モデル 車両M は、後方車両 B との関係から車線変更を行うかを決定する。 車線変更前後において、自車両の加速度変化をa(M) = acc’(M’) – acc(M)、 後方車両の加速度変化をa(B) = acc’(B’) – acc(B)とすると、以下の条件 を満たした場合に、車線変更を行う。条件式で用いられるパラメータ値 は、表とする。また、ρの値は、6FHQDUJLHではとしている。 δ ∆𝑣𝑣 d min d H b 加速度指数 前方車両との速度差 最小車間距離 前方車両との車間距離 ヘッドウェイ 減速度 acc’(B’) > –bsave a(M) > ρa(B) + a thr E 交差点での行動 車両は、次の項目を全て満たした時に交差点表車線変更モデルに関するパラメータ を通過する。 項目 値 ⅰ信号が緑色または黄色である。 acc(M) 車線変更前の車両の加速度 ⅱ次に移動する道路に自車両の大きさ分の空 acc’(M’) 車両変更後の車両の加速度 きがある。 acc(B) 車線変更前の後方車両の加速度 ⅲ他に交差点を移動する車両がいない、もし くは他に交差点を移動する車両がいるが、 お互いが交錯しない状況であるか、自車両 の方に優先権がある。 acc’(B’) bsave ρ athr 車両変更後の後方車両の加速度 車線変更による後方車両の最大限速度 係数 所望速度 F 一般車両 ・出発地と目的地:一般車両の出発地と目的地 には、それぞれランダムに建物が設定される。 運転者は、シミュレーション開始直後に設定 された建物内に生起し、建物の入り口まで徒 歩で向かう。入り口に到着したら、そこに置 かれている車両に乗り込み、目的地の建物に 移動する。 ・最高速度:道路交通法に従いNPKとする。 ・避譲行動:一般車両は緊急車両と通信し、そ の場に応じて緊急車両の走行を支援するため の避譲行動を行う。具体的には、緊急車両か らの%60パケット、フラッディングパケット を受け取った際に、それぞれ以下のように行 図避譲行動のフローチャート 動する。 -%60パケットを受信:受信した %60パケットには、パケット生成車両の位置や速度などの基本的な情報に 現在向かっている交差点の,'、現在走行している道路の,'、走行車線番号などの情報が追加されている。 緊急車両からこのパケットを受信した際は、図のフローチャートに示す条件分岐に従って避譲行動 に移る。ただし、減速および車線変更は、ランダムに与えられる~秒の操作遅延後に開始する。 減速時は、最高速度がNPKとなる。 -フラッディングパケットを受信:受信したフラッディングパケットには、緊急車両の 走行予定経路情報が 含まれている。このパケットを受信した一般車両は、次の交差点に着き次第、緊急車両の経路上を通らな いように探索アルゴリズム$ を再計算して経路を変更する。 G 緊急車両 ・出発地と目的地:緊急車両の出発地と目的地は、一般車両と異なり、あらかじめ設定されている。運転者 は、消防署で生起し、事故現場を経由して目的地である病院に向かう。ただし、道路上を一般車両が十分 ― 235 ― な台数走行するまで待ってから生起するものとする。そのため今回は、緊急車両の生起時間をシミュレー ション開始から秒後に設定した。 ・最高速度:道路交通法に従ってNPKとする。また、Eにおける条件ⅱとⅲを満たす場合にお いて、赤信号時の交差点進入を認める。 ・通信:周辺の車両と通信することで、自車両の接近を一般車両に早期に知らせ、避譲行動を促す。%60ア プリケーションで自車両の位置や速度情報などを、フラッディングアプリケーションで目的地までの予定 走行経路をそれぞれ送信する。 パラメータ設定 シミュレーションに用いた各種パラメータについ 表環境に関するパラメータ て述べる。まず、表にシミュレーション環境設 定を示す。シミュレーション時間は、緊急車両が目 的地に十分到達できる時間長を考えVとす る。シミュレーションでは、一般車両が 台走 行している状況において、緊急車両を 台走行させ る。道路に関する設定値は、参考文献 のパラメ ータに準拠する。信号点灯時間は、シミュレータの デフォルト値を使用している。 次に、モビリティについて述べる。車両別のモビ リティに関するパラメータについては、の F とGで述 べた とお りで あ る。各 パ ラ メー タを 表 に示す。 カテゴリ 項目 値 一般 シミュレーション時間 V 緊急車両数 台 一般車両数 台 道路 道路幅 道路長 車線数(片側) P P 信号点灯時間 緑色 黄色 赤色 V V V 最後に、無線環境とアプリケーションの設定について述べる。各設定パラメータは、表のとおりであ る。実環境では、建物などの遮蔽物による電波の反射や回折が生じることにより、パケットの受信率が低下 することが考えられる。そこで、伝搬モデルには、建物などの遮蔽物による電波の反射や回折を考慮してい る,785B3を用いる。本研究では、パケットの受信率低下も考慮してシミュレーションを行う。 表モビリティに関するパラメータ 表通信に関するパラメータ カテゴリ 項目 値 カテゴリ 項目 値 緊急車両 出発地 目的地 経由地 生起時間 最高速度 消防署 病院 事故現場 V NPK チャネル周波数 *+] 0+] バンド幅 ,785B3 チャネル 伝搬モデル G%P 送信電力 0$&3+<モデル ,(((S 出発地 建物 一般車両 目的地 経由地 生起時間 最高速度 建物 なし V NPK 共通 経路決定方法 最小車間距離 最大加速度 最大減速度 車線変更加速度閾値 $DOJRULWKP P PV PV PV 615閾値 G%P %60 パケットサイズ 送信間隔 開始時刻 終了時刻 開始時刻ジッタ E\WHV V V V PV パケットサイズ E\WHV V 送信間隔 開始時刻 )ORRGLQJ 終了時刻 最大ホップ数 カウンター閾値 開始時刻ジッタ V V PV 走行支援効果の評価 ここでは、初めに車車間通信を用いた緊急車両支援効果の評価方法について述べ、次にシミュレーション 結果とそれに基づく評価を述べる。 ― 236 ― シミュレーション対象 本研究では、以下に示すつの場合においてシミュレーションを行う。 &DVH$:緊急車両が車車間通信を行わない場合 &DVH%:緊急車両が車車間通信によって%60パケットのみ送信する場合 &DVH&:緊急車両が車車間通信によって%60とフラッディングの両方のパケットを送信する場合 &DVH$は、車車間通信を用いて走行する場合の比較対象として、現実での緊急車両の走行を模した状況を 想定している。詳細については、次ので述べる。&DVH%は、緊急車両が%60パケットで自車両の位置 や速度情報を周辺車両に送信し、周囲の車両に減速、車線変更、交差点への不進入を促す場合である。&DVH& は、&DVH%に加え、自車両の走行予定経路情報を含んだフラッディングパケットを周辺車両に送信すること で、同じ経路を走行予定のときは経路変更を促す場合である。 &DVH$:緊急車両が車車間通信を行わない場合 車車間通信を用いた走行支援の効果を測るため、比較対象として通信を用いない、通常の緊急車両が走行 する場合を考える。一般的な運転者が緊急車両の存在を知る手段としては、緊急車両が視界に入ることで視 覚的に認識する場合と、サイレンの音が聞こえることで聴覚的に認識する場合が ある。実際には、視覚的に 緊急車両を認識するより先に、まずサイレンの音を聞いて聴覚的に緊急車両の存在を把握する場合が多いと 考えられる。そのため、サイレン音で緊急車両の存在を認識した後に、目視やルームミラーで位置を確認し、 それから避譲行動に移ると想定する。本研究では、減速および車線変更は、一般車両が緊急車両のサイレン 音を聞いた後、緊急車両の位置を確認できる場合においてのみ可能とする。ただし、緊急車両が交差道路か ら交差点へ進入してきた場合は、サイレン音が聞こえていさえすれば、自車両は交差点に進入せずに緊急車 両を優先させるものとする。 D 避譲行動 シミュレータ上における、通常の緊急車両が走行する際の一般車両の避譲行動について説明する。一般車 両がサイレン音を聞いたとみなす条件は、参考文献 を参考にした。これに加え、本研究では、緊急車両の 位置を確認できる確率が以下の式で与えられるとしている。 1−( 𝑑𝑑 dmax ∝ ) ここで、 Gは自車両と緊急車両との距離、G PD[は一般車両が緊急車両を視認可能な最大距離であり、今回 はPとした。αは重みであり、とした。減速、および車線変更を行う場合は、サイレン音が聞こえ た上で、式によって緊急車両の位置を確認できるかを判定する。位置を確認できた場合は、章のFの 一般車両における避譲行動と同じく、減速、車線変更などを行う。また、これらの避譲行動を行う場合は、 ~秒内でランダムに与えられた値だけ遅れて行動を開始する。 評価指標 本研究では、評価指標として救急時間と車線変更回数について調べる。各項目については、以下で述べる。 ・救急時間:出発地で緊急車両に乗車してから、目的地に到着して車両から降りるまでを救急時間とする。 ・車線変更回数:車線変更を行って追い越すことは、救急時間の短縮に繋がると考えられる。しかし、追い 越しの状況によっては、危険を伴う場合がある。追い越さなくても、周囲の車両があらかじめ緊急車両と 異なる車線に寄っていれば、車線変更が必要となる場面は少なくなり、安全な運転の向上に繋がると考え られる。そこで、右左折のために車線変更する場合を除いた、車線変更回数を調べる。 結果と考察 各 &DVH$、%、&について回ずつシミュレーション 表 シミュレーション実験結果 実験を行った。各&DVHにおけるシミュレーション実験 項目 &DVH$ &DVH% &DVH& 結果を表に示す。結果の値は、各&DVHにおける 救急時間V 回の試行の平均値である。参考として、緊急車両ではな 平均速度NPK く一般車両が走行した場合の救急時間について述べる。 車線変更数回 一般車両が、緊急車両の代わりに&DVH$~&と同様に 消防署を出発し、事故現場を経由して病院に向かう時の救急時間の回平均は、秒であった。 表から、それぞれの評価指標について考察を述べる。 ― 237 ― 救急時間 &DVH%は、&DVH$よりも救急時間が秒長くなった。つまり、約改悪される結果となった。こ の理由は、次のように考えられる。&DVH%では、車車間通信を用いることで、緊急車両の周辺車両が&DVH$ よりも早期に減速などの避譲行動を開始する。しかし、&DVH$よりも多くの周辺車両が早期に減速するため に、緊急車両の進行方向前方において渋滞が引き起こされ、緊急車両の身動きが取れなくなることがある。 この結果より、図に示すフローチャートに従って避譲行動を行う場合、今回のような環境では、かえっ て渋滞を引き起こす可能性があることが分かった。このことより、走行支援システムを考える場合は、避譲 行動を促す対象となる車両を、より適切に選択する必要があるといえる。 &DVH&は、&DVH$よりも救急時間が秒短くなり、約の改善を得る結果となった。この理由 として、緊急車両が周辺車両に経路変更を促したことで、緊急車両の走行経路上にいる車両が減少したこと が考えられる。シミュレーションでは、時間が進むにつれて一般車両が中央部に多く集まる傾向があり、こ れに信号機などの影響も加わることで、一部において渋滞が起こりやすい状況となっている。このため、&DVH $、%における緊急車両は、渋滞の影響を強く受けた結果となった。しかし&DVH&は、渋滞が発生しやすい 環境の中でも、周辺車両に経路変更を促すことで渋滞の影響が小さくなり、円滑な走行ができていると考え られる、よって、高い車両密度環境において、周辺車両への経路変更の促進が有効であることを示す結果と なった。 車線変更回数 &DVH%は回、&DVH&は回、&DVH$よりも車線変更が少ない結果となった。これは、緊急車 両が周辺車両に経路変更を促すことで、緊急車両の走行経路上にいる車両が減少し、追い越しの必要性が減 少したためと考えられる。 おわりに 本研究では、都市部において車車間通信を用いた緊急車両の走行支援が、どのような効果をもたらすかを シミュレーション実験により明らかにした。緊急車両走行支援として、車車間通信を用いて緊急車両の周辺 車両に、減速、車線変更、交差点への進入禁止を促したとき、走行支援を行わない場合と比較すると、 救急 時間を約増加する結果となった。これは、過度の渋滞が発生したことによって、走行支援の効果が出 にくい状況になったことや、避譲行動の対象となる車両選択が不適切であることが原因であると考えられる。 さらに周辺車両に経路変更を促す場合は、緊急車両の走行経路上の交通量を低減できるため、救急時間を約 短縮することができた。上記の結果から、車車間通信による緊急車両走行支援は、都市部おいて救急 時間の短縮の点で有効であると考えられる。また、減速や車線変更などの避譲行動を促す場合は、その対象 となる車両の選択方法を改める必要があることが分かった。今後の課題としては、通信の頻度や送信範囲と いった通信に関するパラメータによって、救急時間がどのように変化するかといったシステムレベルでの評 価を行う。 参考文献 総務省消防庁:平成 年版救急救助の現況 ,救急編, KWWSZZZIGPDJRMSQHXWHUWRSLFVN\XN\XN\XMRBJHQN\RKBN\XN\XSGI,参照 鎌倉市:応急手当の重要性,KWWSZZZFLW\NDPDNXUDNDQDJDZDMSTTN\XPHLRXN\XKWPO,参照 %XFKHQVFKHLW$6FKDXE,).DUJO)DQG:HEHU0:$9$1(7EDVHG(PHUJHQF\9HKLFOH:DUQLQJ 6\VWHP3URF)LUVW,(((9HKLFXODU1HWZRUNLQJ&RQIHUHQFH91& SS2FW 佐藤 拓弥,永長 知孝:緊急車両運行支援システムにおける車車間通信の効果に関する検討,電子情報 通信学会 ,9RO,1R,SS,. %KRVDOH6'KDZDV1$DQG%XUNXO$:9DQHW%DVHG&RPPXQLFDWLRQIRU(PHUJHQF\9HKLFOH,-$5&6(( 9RO1RSS-XO\ 太田 集,能登 正:緊急車両走行支援のための車車間通信による信号制御法,情報処理学会全国大会講 演論文集 ,SS0DUFK /LQ+.DLVHU7.XSIHUVFKLGW&1JX\HQP+DQG-LQJ+:$6WXG\RIWKH.H\7HFKQRORJ\ RI,(((S3URF,QWHUQDWLRQDO&RQIHUHQFHRQ*UDSKLFDQG,PDJH3URFHVVLQJ SS :LOOLDPV%DQG&DPS7:&RPSDULVRQRI%URDGFDVWLQJ7HFKQLTXHVIRU0RELOH$G+RF1HWZRUNV3URF ― 238 ― $&002%,&20 SS 6SDFHWLPH(QJLQHHULQJ,QF:KWWSZZZVSDFHWLPHHQJFRP,参照. 0DUWLQ7$QVJDU+DQG'LUN+:&RQJHVWHGWUDIILFVWDWHVLQHPSLULFDOREVHUYDWLRQVDQGPLFUR VFRSLFVLPXODWLRQV 3K\VLFDO5HYLHZ( SS 財団法人日本自動車研究所:平成年度,76通信シミュレーション評価シナリオ, 平成年度,76シミュ レーション利用推進検討委員会報告書 , 筆者: 高木 由美、システム情報学研究科情報科学専攻、助手; 南 浩明、システム情報学研究科 情報科学専攻、学生; 木下 敦志、システム情報学研究科情報科学専攻、学生; 太田 能、システ ム情報学研究科情報科学専攻、教授; 玉置 久、システム情報学研究科情報科学専攻、教授 ― 239 ― Support the Smooth Running of the Emergency Vehicle in Urban Area Yumi Takaki Hiroaki Minami Atsushi Kinoshita Chikara Ohta Hisashi Tamaki Abstract An emergency vehicle such as an ambulance and a police-car needs to travel to a destination as quickly as possible. As a field of ITS (Intelligent Transport Systems), there is a lot of research on systems to support drive of emergency vehicles. Performance of such systems, however, has not been evaluated enough especially in urban environment. In this paper, we focus on the situation that an ambulance goes to a hospital via a traffic accident site in urban, and in this situation, we evaluate the effectiveness of emergency vehicle drive support based on vehicle-to-vehicle communications. We consider two types of schemes: in one scheme, an emergency vehicle broadcasts information o n its location and velocity to prompt neighboring vehicles to avoid slowing down, changing lane, and entering intersection; in another scheme, an emergency vehicle floods information on its path to drive to prompt other vehicles to avoid using the path. Through simulation results, we confirm that the latter scheme shortens traveling time of an ambulance by 21.2% compared with the case of no support. ― 240 ―
© Copyright 2026 Paperzz