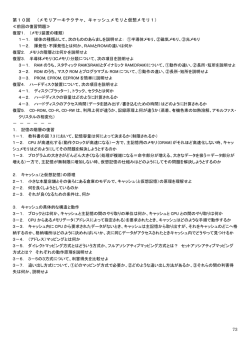
第1章 概要 1 目的と目標 21世紀の宇宙産業の中心となる小型衛星に必要不可欠な電力50W以下の姿 勢制御用エンジンを従来の100分の1の価格(約1千万円/機)で市場に提供する ことを最終目標とする。製品化に至る過程で、道内の下請け企業の持っている技術を 世界の衛星開発の市場へ売り込む効果も狙っている。この技術が世界に普及すれば、 宇宙産業を中心とする先端性の高い産業技術を道内に誘致できる可能性や将来的に は宇宙開発の新しい拠点を作る可能性も生まれる。 当該研究の位置づけは、現在開発中の地上モデル(BBM:ブレッドボードモデ ル)を用いた試験を実施すると共に、フライトモデルを設計・開発することにある。 上記の目的を達成するために以下の研究開発を実施する。 (1)エンジンの耐久試験用真空装置を製作し、地上モデルを用いた実時間耐久試験 を実施する。 (2)民生部品の宇宙転用化を検討し、CPU 等の電子部品の放射線試験を実施する。 (3)電源系及び制御装置の最適設計及びそのフライトモデルを製作する。 (4)推薬供給系(タンクを含む)の小型軽量化設計を行い、そのフライトモデルを 製作する。 (5)エンジンヘッドのフライトモデルを製作する。 以上の技術開発により、北海道内企業との連携を持った衛星搭載用マイクロ波エンジ ンフライトモデルを完成させると共に、その開発体制を確立する。 2 研究開発成果概要 (有)先端技術研究所のマイクロ波エンジンに関する技術シーズをもとに、宇宙環境 および打ち上げ環境を考慮してそのフライトモデル(宇宙用の製品)を設計・製作し た。フライト品としての品質を保証するために、制御回路に用いる CPU の放射線試 験、ロケットでの打ち上げ環境を模擬したランダム振動試験、宇宙での真空環境及び 熱環境を模擬した熱真空試験を実施することにより、100キロ級の小型衛星を想定 した、推力0.36ミリニュートン、総電力22ワット級のマイクロ波エンジンフライ トモデルの開発に成功した。世界的にも小型の電気推進の開発はあまり進んではおら ず、NASA のジェット推進研究所では2〜3年前から小型のイオンエンジンを開発し てはいるが、未だ実用化には至っておらず、本エンジンの完成は世界初の成果といえ る。 このエンジンの推力発生機構は従来の電気推進にはない新しい方式であることもあ り、実績を重視する宇宙業界でこのエンジンを実用化するためには、宇宙で有効に推 力が発生することを実証する必要がある。その第一段階として地上の設備で無重力と 真空環境を模擬するために、北海道空知管内上砂川町の地下無重力実験センター (JAMIC)にてマイクロ波エンジンを模擬した小型電気推進を作動させ、約10秒間 飛行させる実験に成功した。電気推進を無重力下で作動させ、推力発生の様子を視覚 的にとらえる試みは未だなされておらず、世界初の成果といえる。マイクロ波エンジ ンという独自の方式で推力発生を直接的に確認できた工学的意義は大きい。 今回開発したマイクロ波エンジンはアメリカで小型衛星や搭載機器を販売している ワン・ストップ・サテライト・ソルーション社(OSSS 社)から受注があり、同社の 技術試験衛星(通信分野)に搭載し 2001 年 11 月にロシアのバイコヌール基地からの 打ち上げが決まっている。OSSS 社以外にも韓国や中国など海外の小型衛星メーカー からの引き合いも数件ある。 3 事業家に向けた調査等の概要 現在の宇宙開発の世界的な傾向として、放送衛星や通信衛星に代表される大型衛星 の流れと低軌道での衛星ネットワークを構成する小型衛星の流れに2極化しつつあ る。我が国に於いても、近年の度重なる衛星打ち上げの失敗の反省もあり、よりリス クの小さい「衛星の小型高機能化の研究開発」を行うことがH13年度の基本政策と して宇宙開発委員会で決定した。 低軌道での衛星ネットワークの事業化の試みは過去にイリジウムという計画が経 営政略の甘さから失敗したことで、低軌道での小型衛星の実利用化がトーンダウンし た時期もあるが、現在ではイリジウムより更に小型・低コスト化することで初期投資 を減らしリスクを抑える方向で小型通信衛星のネットワーク化を実現することが検 討されている。 中国では小型衛星開発のための政府系企業が設立されるなど、特にアジア諸国では 小型衛星の研究開発ならびに、低軌道通信衛星ネットワークによる IT インフラの整 備を見据えた実利用の検討が行われている。本研究開発の成果であるマイクロ波エン ジンは米国小型衛星製造メーカー数社、韓国企業、中国企業から引き合いが来ており、 高性能なこのエンジンを用いた小型衛星のニーズがあることを証明している。 これまで小型衛星の利用があまり盛んでなかった理由として、打ち上げが大型衛星 との相乗り(ピギーバックという)が殆どであり、小型衛星側では軌道を自由に選べ なかったことにある。ピギーバックの場合には、軌道が異なる静止衛星との相乗りは できず、全ロケットの打ち上げの2割しか利用できなかった。本研究開発の発展形と して、大気圏離脱後に自力で任意の軌道に移動して目的の軌道を維持できる次世代の 小型衛星の開発が強く望まれている。 現在は IT の発達などにより小型衛星市場がようやく生まれようとしている段階で あり、現状での市場規模は評価の方法はないが、今後5年間でこの市場は飛躍的に伸 びると予測している。5年後の軌道変換機市場は全世界で約350億円程度(年間2 0〜30機打ち上げ)、10年後には1000億円を越える市場となるであろう。 4 今後の課題 マイクロ波エンジン装置の設計・製作は完了したが、耐久性の評価が十分とはいえ ない。当初の目標に対する本研究開発全体の達成率は95%程度といえる。 小型衛星市場を創り上げるという意味では、次の課題として軌道変換用ハイブリッ ドエンジンの開発が必要である。これに競合するシステムとして AeroAstro 社の SPORT という製品があるが、価格と安全性の両面から我々の技術が優位となる勝算が ある。 5 5.1 研究開発スケジュールと主な設備内容 研究開発スケジュール表 研 究 H12.3〜H12.9 開 発 期 間 H12.10〜H13.3 ・システムの詳細仕様決定 ・システム性能評価 ・小型軽量部品の調査 サブテーマ名 全体システム設計 機関名 (有)先端技術研究所 放射線試験 (期間目標) (有)先端技術研究所 エルムデータ(株) 仕様決定 ・CPU, RAM の選定 ・放射線試験の準備 ・ 組み立て及び評価 ・放射線試験の実施 (期間目標) (有)先端技術研究所 試験の準備 ・耐久試験装置の製作 試験実施及び評価 ・耐久試験の実施 (期間目標) ㈲先端技術研究所 (有)札幌金型 装置開発 ・フライト品の設計 ・宇宙用部品の発注 耐久性評価 ・フライト品の製作 (期間目標) 詳細設計 試作及び評価 電源系・制御系 エルムデータ(株) ・フライト品設計 ・フライト品の製作 ・フライト品の評価 ・ 推薬供給系 (期間目標) (有)先端技術研究所 詳細設計 ・推薬供給系の設計 ・タンクの設計 ・宇宙用部品の発注 試作及び評価 ・コンポーネント製作 ・タンクの製造 (期間目標) 詳細設計 試作及び評価 耐久試験 エンジン本体 5.2 主な購入設備(500万円以上)名称と使用目的、設備場所一覧表 購入設備名称: 使用目的 : 設備場所 : 熱真空試験装置 電気推進装置の熱真空試験 (有)先端技術研究所 購入設備名称: 使用目的 : 設備場所 : 電気推進装置(フライトモデル) マイクロ波エンジンのフライトモデル(研究成果品) (有)先端技術研究所 6 研究開発体制図、研究実施場所一覧 6.1 研究開発体制図 6.2 管理体制図 1.1 研究実施場所一覧表 組 織 名 住 所 札幌市北区北7条西2丁目8番地 北ビル7階 有限会社先端技術研究所 札幌市手稲区前田4条13丁目1の3 有限会社札幌金型 札幌市西区発寒16条13丁目3の55 株式会社エルムデータ 札幌市厚別区下野幌テクノパーク1丁目 2の15 7 財団法人北海道地域技術振興センター 研究開発担当者一覧表 【有限会社先端技術研究所】 氏 名 役 職 佐鳥 新 取締役 岡本 博之 取締役 杉木 光輝 代表取締役社長 青木 嘉範 技術部 【有限会社札幌金型】 氏 名 小山田 亨司 (4名) 研 究 項 目 ・エンジンシステムのフライトモ デルの検討 ・エンジンシステムの性能評価と 耐環境性評価 (1名) 役 職 代表取締役社長 研 究 項 目 ・エンジンシステムのフライトモ デルの検討 【株式会社エルムデータ】 氏 名 役 職 村上 由彦 代表取締役社長 河村 正憲 技術部 牧 秀幸 技術部 (3名) 研 究 項 目 ・エンジンシステムのフライトモ デルの検討 ・エンジンシステムの性能評価と 耐環境性評価 8 工業所有権等の取得状況 特になし 9 外部発表等の状況 9.1 発表論文 S.Satori, H.Okamoto, Y.Aoki, A.Nagata and T.M.Sugiki, "New Electrostatic Thruster for Small Satellite Application", Joint Propulsion Conference, Huntsville, July 2000 T.Ishikawa, S.Satori, S.Takezawa, R.Mitsuhashi, M.Sasaki, M.Suzuki, A.Nagata and T.Takada, "Breadboard Model of Nanosatellite Mothership Daughtership Experiment", The 14th Annual AIAA/Utah State University Conference on Small Satellites, Utah, August 2000 S.Satori, H.Okamoto, Y.Aoki, A.Nagata and T.M.Sugiki, "Design Status of Engineering Model of Microwave Discharge Electrostatic Thruster", 3rd International Conference on Spacecraft Propulsion, Cannes-France, Oct. 2000 青木嘉範、佐鳥新、長田淳、岡本博之 「小型衛星搭載用新型電気推進機の EM 設計」、 日本機械学会北海道支部第40回講演会、平成12年9月 松浦申多、佐川紘基、長田淳、佐鳥新、青木嘉範 「小型衛星搭載のための新型電気 推進機の製作及び試験」、電気関係学会北海道支部連合大会、平成12年10月 前博之、佐鳥新、岡本博之、杉木光輝、浅野哲理、佐川紘基、松浦申多 「無重力場 における電気推進の作動実験」、第10回短時間無重力利用に関する講演会、平成1 3年2月 長田淳、佐鳥新、岡本博之、青木嘉範、鈴木勝裕 「新型マイクロ波エンジンの作動 実証」、 北海道工業大学研究紀要 第29号、平成13年3月 9.2 新聞発表 札幌タイムス「新しいイオン推進型エンジン開発」 平成13年2月11日 Space Daily "Successful Flight Demonstration of Plasma Thruster Under Microgravity", Feb.27 2001 10 英文要約 Based on a new concept, a low power electrostatic thruster has been developed for its application to 50 kg class satellites, which is named “Microwave Engine”. This new thruster has the following characteristics. First, this thruster consists of an ion acceleration chamber and electron emitter (neutralizer). Second, xenon is used as a propellant gas. Third, the plasma is generated using microwave discharge. Forth, two electrodes are located both at upstream and downstream of the discharge chamber, respectively. The ions are neutralized by the electrode of the downstream in the same manner as the hall type accelerator. Finally, applied acceleration voltage between two electrodes can make an electrostatic field gradient in the plasma while ions are accelerated to generate the thrust. Our developed thruster is operated at 22W. The estimated performances are 1256 seconds in specific impulse, 0.36mN in thrust and 10% in thrust efficiency. Based on the environment in space and that in a rocket launch, the quality of the flight model was investigated with respect to the radiation test, the thermal and vacuum test and the random vibration test. The radiation test examined the tolerance of the electric device (especially an onboard computer) against the solar high energy particle irradiation. The vibration test checked the mechanical strength of the structure when it is launched by the rocket. The tolerance of the electrical circuits of the thruster system was investigated by exposing it in the vacuum chamber with the heat cycles from -20 to 50 centigrade degrees. In the future mission, Microwave Engine will be demonstrated in space to check its performance as an attitude actuator of 50kg class satellites in late 2001. As another topic in this study, to evaluate the feasibility of its accelerating mechanism, the flight demonstration of a plasma thruster is implemented under microgravity. The flight demonstrated thruster has an aperture of 19mm in diameter. The same accelerating mechanism as Microwave Engine is applied to the plasma thruster although there is a difference in the mechanism of generating plasma. The flight demonstrator utilizes the glow discharge while the microwave discharge is applied to Microwave Engine. In this study, the thrust is estimated based on the flight path of the plasma thruster under microgravity, the swing of its pendulum under 1G and the beam theory of its copper wires. As a result, this successful experiment, which had very large visual impact, became the first flight demonstration of the plasma thruster in the world. In our future plan, Microwave Engine will be modified for its application to large satellites such as geostationary satellites. The modified Microwave Engine must have larger configuration than current Microwave Engine. Their configurations, however, will be completely same. 2.1 エンジン本体設計と作動点に関する研究 1.1.1マイクロ波エンジンの原理 静電加速型の電気推進として代表的なイオンエンジンと新型スラスタ(マイクロ波 エンジン)との相違点について説明する。従来の直流放電を利用したイオンエンジン では低電力では放電室が小さくなるため、プラズマの閉じ込め効果が悪くなり、性能 が激減する傾向にある。一方、マイクロ波放電、特に電子サイクロトロン共鳴(ECR) を利用するタイプのプラズマ生成方式では ECR 領域での局所的なプラズマ生成が可能 となるため、むしろ小型化した方が性能は良いといえる。両者の特徴を図1−1に示 す。 図2.1. 1 従 来型の イオン エンジ ンとマ イクロ 波エン ジンと の比較 この 電気推 進機は イオン 加速室 と中和 器から 構成されている。推進剤には Xe ガスを使用し、プラズマは、マイクロ波と放電室内の カスプ磁場による電子サイクロトロン共鳴(ECR)により生成される。電極は放電室の 上流と下流にそれぞれ配置する。中和はホールスラスタと同じように下流に置かれた 電極により行われる。この二つの電極間に加速電圧を与えてプラズマの中に静電界勾 配を形成し、イオンを加速して推力を得る。図2.1.1にエンジンの原理を示す。 図2.1.2 マイクロ波エンジンの原理 マイクロ波エンジンシステムは主にスラスタヘッド,電源部,推進剤貯蔵供給系等か ら構成される。さらに、マイクロ波エンジン本体は図2.1.2にその概念を示すが、 その推力発生過程/機構から大きく以下の三つの部分に分けられる。 (1)プラズマ生成部(イオン源) : 最初に推進剤タンクからプラズマ生成部(放電室)へ推進剤を供給し、放電によ り推進剤を電離させる。電離の方法はいくつかあるが、マイクロ波エンジンで用い る電離型式にはマイクロ波電子サイクロトロン共鳴を用いている。 (2)イオン抽出/加速部: イオン抽出/加速部が印加された高電位差を利用してプラズマ生成部(イオン 源)から推進剤イオンを抽出/加速する。イオンの加速はイオンエンジンでは通常 2枚のグリッドを通して行われるが、このマイクロ波エンジンではプラズマ源の下 流に特に電極を設けず、中和器型放出される電子雲が実質的な電極として作用する。 このことはイオンエンジンの致命的欠点であるゴミによるグリッド間短絡事故モ ードを構造的に回避できるため、信頼性の面で極めて有利といえる。 (3)中和器: 抽出/加速されたイオンビームは中和器から供給される電子により全体として 中性と外部に噴射される。マイクロ波エンジンに用いられている中和器は、フィラメ ント熱陰極を用いている。この方式では寿命に限りがあるが、中和器を複数配置する ことや、フィラメントにトリプルカーボネイトを塗布することにより、フィラメント にかかる負担の軽減を行っている。また、中和器の位置はイオンビームに直接たたか れぬ程度に離れ、かつイオンビームとの電位差が大きくならぬよう(〜20V)に決め られる。 マイクロ波エンジンのイオン生成の原理は、マイクロ波電子サイクロトロン共鳴型 (ECR)を用いている。 推進剤としては、化学的に不活性なキセノンが用いられ ている。 1.1.2性能評価の方法 マイクロ波エンジンの性能を表すパラメータであるイオン生成コストC(V)と推進剤利用効率 ηu を次式のように定義する。 C[V] = Pmicrowave [W] Ib [A] ηu = Ib [A] m [eqA] イオン生成コストとは、電気推進に用いる特有の性能パラメータである。このイオン生成コ ストの意味は、プラズマ中の推進に用いられるイオンを 1 個生成するために使用されるエネ ルギーを表している。このパラメータは、マイクロ波電力(Pmicrowave)とビーム電流(Ib)の割算 で定義され、電圧の単位をとる。イオン生成コストは、その値が小さいほど性能が良いといえ る。 推進剤利用効率とは、推進剤がイオンビームに変換される確率を表すパラメータである。 この定義は、イオンビーム電流(I b )を推進剤として用いられるXe原子の等価電流換算値 (すべて 1 価イオンとして電離すると仮定した値)で割った値として定義される。推進剤利用 効率が1に近いほど推進剤のリークが少ないことを意味している。 1.1.3形状パラメータ 平成11年度の基礎実験結果をもとに、マイクロ波スラスタを設計するにあたり、形状パラメ ータを最適化し、技術モデル(EM: Engineering Model)を製作するため放電室形状等が異 なった3種類のマイクロ波エンジンを製作し放電室形状の決定、マイクロ波電力の決定、Xe ガスの流量決定等を行った。 開口径17mm 開口径20mm 磁石 磁石 図2.1.3 スラスタタイプ(大) 図2.1.4 スラスタタイプ(中) 磁石 図2.1.5 スラスタタイプ(小) 放電室で生成したプラズマからイオンを引き出し、性能を評価するために、スラスタ本体 には正の電圧を、スラスタ開口部の下流に設けた金属のメッシュのイオンコレクタには負の 電圧を与えた。イオンコレクタに流れるイオン電流からイオン生成コストと推進剤利用効率を 評価した。性能測定の概要図を図2.1.6に示す。図2.1.7〜図2.1.8には実験装置の構成 図および写真を示す。 スラスタ イオンコレクタ 図2.1.6 性能測定の方法 図2.1.7 実験装置 構成図 図2.1.8 実験装置の写真 イオン生成コストについては Xe の流量が 0.3sccm の条件での比較を行なった。0.3sccm とし たのは本研究では小型衛星搭載用の電気推進の開発を行なっているので推進剤流量がよ り低い流量での作動を狙ったものである。生成コストはマイクロ波スラスタ(大)が 1013[eV]、 (中)が 1102[eV],(小)が 639[eV]となった。Xe0.3sccm ではタイプ(小)がもっとも低い値が得 られた次に、5W については、タイプ(大)、(中)では推進剤が 0.4sccm 以下の低い状態では ではプラズマを維持することが出来なかった。(小)は 0.3sccm で生成コストは 523[eV]となっ た。推進剤利用効率の比較ではマイクロ波電力 5W 時において(大)では 0.24〜0.32、(中) は 0.23〜0.30、(小)は 0.44〜0.49 となった。 マイクロ波電力 10W 時では、(大)が 0.39〜0.49、(中)0.42〜0.52,(小)0.72〜1.14 という値 が得られた。タイプ(小)、10W、0.3sccm の条件では 0.72 となっている。これは加速電圧が 100V で固定と加速電圧が不充分と考えられるため低い推進剤利用効率になったと思われ る。マイクロ波電力 10W、5W のどちらの場合もタイプ(小)のスラスタが、(大)(中)よりも高い 推進剤利用効率を得ることが出来た。また、タイプ(小)の測定時に推進剤利用効率が 1.14 と「1」を超える値が求められた、これはビーム電流検出では一価イオンと二価イオンの和を 測定しているので、すべてのビーム電流が一価イオンと仮定して計算を行なっているために スラスタ(小)の測定時に 2 価イオンが放出されたものだと考えられる。 以上の結果よりイオン生成コスト、推進剤利用効率のパラメータから見てスラスタの形状は 開口径 17mm のスラスタタイプ(小)が有利であることがわかった。 マイクロ波電力5W 1200 小5W 1000 中5W 大5W 800 600 400 200 0 0 0.1 0.2 0.3 0.4 0.5 Xe流量[sccm] 0.6 0.7 0.8 図2.1.9 マイクロ波電力5Wのときのイオン生成コスト マイクロ波電力 10W 1200 小10W 1000 中10w 大10W 800 600 400 200 0 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 Xe流量[sccm] 図2.1.10 マイクロ波電力10Wのときのイオン生成コスト マイクロ波電力 5W 1 推進剤利用効率 0.8 0.6 小5W 中5W 大5W 0.4 0.2 0 0 0.1 0.2 0.3 0.4 0.5 Xe流量[sccm] 0.6 0.7 0.8 図2.1.11 マイクロ波電力5Wにおける推進剤利用効率 マイクロ波電力 10W 1.2 小10W 1 中10w 大10W 0.8 0.6 0.4 0.2 0 0 0.1 0.2 0.3 0.4 0.5 Xe流量[sccm] 0.6 0.7 0.8 図2.1.12 マイクロ波電力10Wにおける推進剤利用効率 1.1.4マイクロ波エンジン技術モデルとその作動点 マイクロ波スラスタのEM設計では、前節の形状パラメータの結果を基に、より小型・高効率 を目指し小型形状をベースにしてスラスタの設計を行った。放電室形状は同一とし、スラスタ の開口径がφ17mmもの(タイプA)、その開口部にφ10mmのオリフィスを挿入して開口径 を絞ったタイプ(タイプB)を用意し、ビーム電流等の測定を行って性能を評価した。 1400 1200 タイプA μ波 5W Xe 0.5sccm 1000 タイプB μ波 3W Xe 0.3sccm 800 600 400 200 0 0 100 200 加速電圧 Vsc[V] 300 図2.1.13 イオン生成コストと加速電圧の関係 1 0.9 タイプA μ波 5W Xe 0.5sccm 0.8 タイプB μ波 3W Xe 0.3sccm 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 0 100 200 300 加速電圧 Vsc[V] 図2.1.14 推進剤利用効率と加速電圧の関係 図2.1.13にイオン生成コストと加速電圧の関係を、図2.1.14に推進剤利用効率と加速電圧 の関係をそれぞれ示す。 タイプ A のスラスタでは、加速電圧 178V 時でイオン生成コスト 149.1[eV],推進剤利用効率 0.93 となった。タイプ B のスラスタでは、加速電圧 300V 時でイオン生成コスト 200[eV]、推 進剤利用効率 0.70 が得られた。ここで表2.1.1に示す作動点での比推力 Isp 及び推力 F の 算出をおこなう。図2.1.15に比推力を、図2.1.16に推力のグラフを示す。 表2.1.1 エンジンの作動点 パラメータ タイプ A マイクロ波電力 5W 中和器電力 2W その他電力 1W マイクロ波アンプ効率 0.3 推進剤流量 0.5sccm イオンビーム電流 33mA 推進剤利用効率 0.9 加速効率 0.7 ビーム発散損 0.7 タイプ B 3W 2W 1W 0.3 0.3sccm 15mA 0.7 0.5 0.7 1400 1200 1000 800 タイプA μ波 5W Xe 0.5sccm 図2.1.15 比推力と加速電圧の関係 0.7 0.6 タイプA μ波 5W Xe 0.5sccm 0.5 0.4 0.3 タイプB μ波 3W Xe 3sccm 0.2 0.1 0 0 100 200 300 加速電圧 Vsc[V] 図2.1.16 加速電圧と推力の関係 以上の結論として、タイプ A 、Bの作動点と写真を図2.1.17にまとめる。 図2.1.17 エンジンの作動点と作動時の写真 2.2 マイクロ波エンジンシステムの研究開発 2.1節ではタイプ A とタイプ B の2つの作動点が存在することを示した。本研究開 発事業では衛星重量100kgを想定し、より小電力で作動するタイプ B をフライト 品として開発するものとする。 マイクロ波エンジンシステムは推力を発生させるエンジン本体の他に、それを作動さ せるのに必要な電源類、推薬供給系、制御系から構成される推進モジュールである。 マイクロ波エンジンのシステムのブロック図を図2.2.1に示す。 図2.2.1 マイクロ波エンジンのシステムのブロック図 保護回路 :異常な電流が流れときに回路が故障するのを防ぐ。 ヒータ電源1:点火器を駆動させる電源。 ヒータ電源2:中和器を駆動させる電源。 推薬供給系 :推薬の流量を制御する。 μ波アンプ :1.5GHz、3Wのマイクロ波を発生する。 加速電源 :ヘッドにプラスの電圧を印加する事でイオンビームを加速する。 Xeタンク :Xeを貯蔵する。 半導体リレー:点火器及び中和器が故障した場合冗長系に換えるためのリレー。 中和器 :イオンビームに電位勾配を与える。 点火器 :プラズマを点火する際に使用。 CPU :衛星からのコマンドに従い、各装置を制御する。 マイクロ波エンジン EM モデルの測定データを基にエンジンヘッド PM モデルの設 計を行なった。図2.2.2にエンジンヘッドの外観図を示す。エンジンヘッド本体の 材質はステンレス材の中の SUS430 とする。磁場の形成に使用した磁石は EM モデル と同じく Sm-Co とする。推進剤である Xe は放電室内下方に取り付けたプレナム層か ら放電室内に一様に流れ込む構造としている。アンテナはビーム加速によるスパッタ などの対策からカーマン社製の SMA コネクタを使用する。エンジンヘッド内部の絶 縁壁はマシナブルセラミックのマコールとする。中和器は冗長系を含めて8基とする。 中和器を支持するためにエンジンヘッドの開口部はマコールで製作する。放電室内部 の絶縁壁と中和器支持は一体成形とした。点火器は冗長系を含め4基とし、放電室内 に配置する。 中和器支持(マコール) 放電室 中和器×8基 図2.2.2 エンジンヘッドの外観図 図2.2.3 マイクロ波エンジンのフライトモデル(1) 図2.2.4 マイクロ波エンジンのフライトモデル(2) 第2章 2.3.1 電源系及び制御系の研究開発 エンジン制御装置の概要 電源系及び制御系から成る電子回路をエンジン制御装置と呼ぶ。図2.3.1中の点線 部がエンジン制御装置である。以下、その各論について説明する。 図2.3.1 エンジン制御装置の構成 2.3.2 インターフェース条件 エンジン制御装置と衛星本体、およびエンジン制御装置と各エンジンとのインターフ ェース条件を以下に示す。 第3章 衛星本体とのインターフェース 入力 (1) コマンド(TTLレベル) L スタンバイ(Off) H 点火 (On) (2) CPUリセット(TTLレベル) L:リセット。リセットパルス幅:Lレベルが100ns以上持続。 CPU 電源通電時⇒CPU電源を一定時間 OFF にした後復帰 CPU 電源遮断時⇒CPU 電源遮断回路の解除 出力 (1) 点火確認(CPU I/O) 初期値:L エンジン点火中:H (2) 点火エラー(CPU I/O) 点火及び加速シーケンス中に、リトライ回数を超えた場合に出力 初期値:H、異常時:L (3) CPUエラー(TTLレベル、CPU 電源遮断回路より出力) CPU 電源遮断時に出力。初期値:H、異常時:L 点火エラーステータス出力 ・中和器ヒータ異常(CPU I/O) 初期値:H、異常時:L ・点火器ヒータ異常(CPU I/O) 初期値:H、異常時:L ・加速電流異常(CPU I/O) 初期値:H、異常時:L (4) テレメトリー(アナログ出力、各回路またはセンサーから出力) ・マイクロ波アンプ温度 ・スラスタ温度 ・マイクロ波入射電力 ・マイクロ波反射電力 ・推薬タンク温度 ・推薬タンク圧力 ・点火電流 ・中和電流 ・加速電圧 2 加速電流 2.3.1.2 各装置(エンジン間 I/O)とのインターフェース 表2.3.1 エンジン間 I/O とのインターフェース条件 I/O レベル 論理 初期値 モジュール 信号名 動作 H で電源 ON Out TTL L 推薬供給系 Valve̲Power 正 0V 推薬供給系 Valve̲Control Out Analog − バルブ制御 50mA/V Out TTL L μ波アンプ Amp̲Power 正 H で電源 ON H で電源 ON Out TTL L NT̲Powor 中和器 正 Out TTL H NT̲On 中和器 負 L でヒータ On Out TTL L NT̲Select 中和器 正 ヒータ選択 Out TTL L NT̲Select 中和器 正 ヒータ選択 Out TTL L NT̲Select 中和器 正 ヒータ選択 ヒータ電流検出時 L In TTL NT̲HtDetect 中和器 負 − ヒータ過電流検出時 L In TTL NT̲Iover 中和器 負 − In TTL NT̲Idetect 中和器 負 − 中和電流検出時 L H で電源 ON Out TTL L 加速電源 HV̲Power 正 Out Analog 0V 加速電源 HV̲Set − 加速電圧 200V/V In Analog 加速電源 HV̲Vmonit − − 加速電圧モニタ 200V/V In Analog 加速電源 HV̲Imonit − − 加速電流モニタ 0.1V/mA H で電源 ON Out TTL L IGT̲Power 点火器 正 Out TTL H IGT̲On 点火器 負 L で IGT-On Out TTL L IGT̲Select 点火器 正 IGT 選択 Out TTL L IGT̲Select 点火器 正 IGT 選択 In TTL IGT̲HtDetect 点火器 負 − ヒータ電流検出時 L In TTL IGT̲HtLimit 点火器 負 − 過電流検出時 L 2.3.2 CPU 動作異常の検出と対策 宇宙放射線の影響で CPU に異常が発生したときのシーケンスを説明する。 2.3.2.1 異常検出 (1) CPUラッチアップ CPU電流は正常動作時は50〜65mAなので、85〜100mAを超えた場合 を検出。 (2) CPUアップセット CPU内蔵ウオッチドックタイマを使用、CPUエラー信号線により異常を通知。 2.3.2.2 CPU 電源遮断 以下の場合に CPU の電源を遮断。 ・CPU内蔵ウォッチドックタイマが設定カウントを越えた場合 ・CPU電流が85〜100mA 以上になった場合 2.3.2.3 CPU 電源の復帰 衛星本体からのリセット信号で復帰。 図2.3.2 2.3.3 CPU 遮断回路のブロック図 図2.3.3 CPU電源遮断回路の写真 (点火器制御回路と推薬供給系回路の裏面) 点火器制御回路 点火器制御回路は 4 個ある点火器から一つを選択し使用、そしてそれの断線検知等を 行うものである。回路動作は中和器制御回路とほぼ同等である。 1) 電源を入力端子に 12V を加える。 2) DRIVE_POWER に”H”を入力。 3) Tr. ON、Photo MOS#3,#4 が導通し 7805、REF03G に電圧が加わる。 4) +5V、+2.5V が出力され各 IC に電源が加わる。 5) IGT-1 が動作する入力を加える。 6) 各 IGT-1 の Photo MOS が ON になり点火器に電流が流れる。 7) 電流確認は LM393 によって行われる。すべては基準電圧とシャント抵抗に生じ る電圧によって判断される。電流が 4A 以上で”L”、また過電流についても電流が 8A 以上で”L”が出力される。 図2.3.4 点火器制御回路のブロック図 図2.3.5 点火器制御回路と推薬供給系回路の写真 2.3.4 中和器制御回路 中和器制御回路は 8 個ある中和器から一つを選択し使用、そしてそれの断線検知、 中和電流検知等を行うものである。 1) 電源入力端子に 12V を加える。 2) DRIVE_POWER に”H”を入力。 3) Tr.が ON、Photo MOS#3,#4 が導通し 7805、REF03G に電圧が加わり、+5V、+2.5V が出力される。 2 以下に中和器を選択する際に使用する 74LS138 の真理値表と、その中和器の 選択を表す真理値表を示す。 図2.3.6 中和器制御回路のブロック図 図2.3.7 中和器制御回路の写真 2.3.5 推薬供給系回路 推薬供給回路は推薬である Xe ガスをスラスタに供給する回路である。供給するガ スの量はマイクロプロッセさ H8 から調節が可能である。 1) 2) 電源 12V を回路に加える。 POWER_ON に”H”を加える。Tr は ON になり Photo MOS が ON になり#3、#4 が導通し推薬供給装置、OP Amp に電源が加わる。 3) Xe ガスの流量は OP Amp のマイナス端子に H8 から加わるアナログ電圧 によって調整が可能である。その分解能は 8 ビットで、5 [V]を 256 段階で分けること ができる。 図2.3.8 推薬供給系のブロック図 3 エンジン制御ソフト スラスター制御シーケンス及びソフトウェアの構成を以下に説明する。 変数 中和器ヒータ番号、 点火器ヒータ番号 中和器ヒータ異常(初期値 0)、 点火器ヒータ異常(初期値 0) 加速電流異常(初期値0)、点火フラグ(初期値 0) メインルーチン 1.変数初期化 2.I/O ポート設定 3.Call スタンバイ Do 4.コマンド確認 If コマンド=点火 Then Call 点火ルーチン Loop 点火ルーチン 1.変数初期化 リトライ回数=1 Do 2.Call スタンバイ 3.Wait3秒 4.Call 点火シーケンス(点火フラグ) 5.リトライ回数>5の場合 点火エラー出力ポートを H 、Call スタンバイ、Return 6.点火フラグ=0の場合 Call スタンバイ、Wait30秒 7.リトライ回数 +1 Loop Until 点火フラグ=1 8.Wait 3秒 9.Call 加速電源加速モード Do 10.コマンド確認 コマンド=スタンバイの場合 Call スタンバイ、Return 11.Call 点火確認 点火確認フラグ=0の場合 Wait30秒(再点火迄のウエイト)、Call スタンバイ、Return 12. Call 中和器ヒーター電流確認 確認フラグ=0の場合 Wait30秒(再点火迄のウエイト)、Call スタンバイ、Return Loop [点火シーケンス] 1.変数初期化 中和器ヒータ異常=0、点火器ヒータ異常=0、加速電流異常=0、 点火フラグ=0、点火確認出力を L 2.ステータス出力ポート初期化 中和器ヒータ異常:L、点火器ヒータ異常:L、加速電流異常:L 3.Call 中和器ヒータ断線チェック(戻り値:ヒータ番号、ヒータ異常フラグ) ・ヒータ異常フラグ=0の場合 中和器ヒータ番号=ヒータ番号 ・ヒータ異常フラグ=1の場合 点火フラグ=0、点火確認出力を L、中和器ヒータ異常=1、 中和器ヒータ異常出力ポートを H、リターン 4.Wait 3秒 5.Call 点火器ヒータ断線チェック(戻り値:ヒータ番号、ヒータ異常フラグ) ・ヒータ異常フラグ=0の場合:点火器ヒータ番号=ヒータ番号 ・ヒータ異常フラグ=1の場合 点火フラグ=0、点火確認出力を L、点火器ヒータ異常=1、 点火器ヒータ異常出力ポートを H、リターン 6.Wait 3秒 7.Call 中和器 ON (中和器ヒータ番号) 8.Wait 30 秒 9.Call 加速電源点火モード 10.Call ガス供給 11.Wait 5 秒 12.Callμ波アンプ ON 13.Wait 3 秒 14.Call 点火器 ON (点火器ヒータ番号) 15.Wait 1秒 16.Call 加速電流確認(戻り値:確認フラグ) ・確認フラグ=1の場合 点火フラグ=1、点火確認出力を H、リターン ・確認フラグ=0の場合 点火フラグ=0、点火確認出力を L、加速電流異常=1、 加速電流異常出力ポートを H、リターン [スタンバイ] 1.ステータス出力ポートを初期化 点火確認出力:L、点火エラー:H、 中和器ヒータ異常:H、点火器ヒータ異常:H、加速電流異常:H 2.I/O 出力、D/A を以下の初期値にセット 表2.3.2 モジュール 推薬供給系 推薬供給系 μ波アンプ 中和器 中和器 中和器 中和器 中和器 加速電源 加速電源 点火器 点火器 点火器 点火器 スタンバイ時の I/O 初期値 信号名 レベル 初期値 Valve̲Power Valve̲Control Amp̲Power NT̲Powor NT̲On NT̲Select NT̲Select NT̲Select HV̲Power HV̲Set IGT̲Power IGT̲On IGT̲Select IGT̲Select TTL Analog TTL TTL TTL TTL TTL TTL TTL Analog TTL TTL TTL TTL L [中和器ヒータ断線チェックルーチン] 戻り値:ヒータ番号(1−8)、ヒータ異常フラグ(0/1) 変数初期値:ヒータ番号=1 1.NT_Power を H Do 2.Wait 1秒 3.NT_Select(3bit)でヒータを選択 4.NT_On を L 5.Wait 1 秒 6.NT_HtDetect、.NT_Iover をセンス。 8.NT_On を H 9. NT_HtDetect=L かつ NT_Iover=H の場合 ヒータ異常フラグ=0 、戻り値=ヒータ番号、終了(Return) 10.ヒータ番号=8 の場合 ヒータ異常フラグ=1、NT_Power を L 、終了(Return) 11.ヒータ番号を+1 0V L L H L L L L 0V L H L L Loop [点火器ヒータ断線チェックルーチン] 戻り値:ヒータ番号(1−4)、ヒータ異常フラグ(0/1) 変数初期値:ヒータ番号=1 1.IGT_Power を H Do 2.Wait 1秒 3.IGT_Select(2bit)でヒータを選択 4.IGT_On を L 5.Wait 1 秒 6.IGT_HtDetect、IGT_HtLimit をセンス。 8.IGT_On を H 9. IGT_HtDetect=L かつ IGT_HtLimit=H の場合 ヒータ異常フラグ=L 、戻り値=ヒータ番号、終了(Return) 10.ヒータ番号=4の場合 ヒータ異常フラグ=1、IGT_Power を L 、終了(Return) 11.ヒータ番号を+1 Loop [ガス供給] 1.Valve_Power を H 2.Wait 1秒 3.Valve_Control(D/A)を 2.4V にする(バルブ全開) 4.Wait 約 50ms 5.Valve_Control(D/A)を 2.0V にする。 [μ波アンプ ON] 1.Amp_Power を H 2.Wait 1秒 [中和器 ON] 1.NT_Power を H 2.Wait 1秒 3.NT_Select(3bit)でヒータを選択 4.NT_On を L 5.Wait 1 秒 [点火器 ON] 1.IGT_Power を H 2.Wait 1秒 3.IGT_Select(2bit)でヒータを選択 4.IGT_On を L 5.Wait 1 秒 [点火確認] 1. HV_Imonit(加速電流)を A/D 2. 電圧が0.3V(加速電流が3mA)以上の場合、確認フラグ=1 Else 確認フラグ=0 [加速確認] 1. HV_Imonit(加速電流)を A/D 2. 電圧が0.7V(加速電流が7mA)以上の場合、確認フラグ=1 Else 確認フラグ=0 [加速電源点火モード] 1.HV_Power を H 2. HV_Set(D/A)を0.5V(加速電圧100V)にセット 3. Wait 1 秒 [加速電源加速モード] 1. HV_Set(D/A)を0.75V(加速電圧 150V)にセット 2. Wait 1秒 2. HV_Set(D/A)を1V(加速電圧 200V)にセット 3. Wait 1 秒 4. HV_Set(D/A)を1.25V(加速電圧 250V)にセット 5. Wait 1 秒 6.HV_Set(D/A)を1.5V(加速電圧 300V)にセット 7. Wait 1 秒 [中和器ヒーター電流確認] 1.Nt̲HtDetect をセンス 2.Nt̲Iover をセンス 3. Nt_HtDetect=L かつ Nt_Iover=H の場合は確認フラグ=1 Else 確認フラグ=0 2.4 推薬供給系の研究開発 2.4.1 推薬供給系の構成 推薬供給系とはエンジンに一定流量のキセノンガスを供給するための装置である。従 来のイオンエンジンの推薬供給方式はデジタル制御方式が多く使われてきたが、本研 究では従来方式と最新技術のトレードオフを行うことで、小型衛星搭載機器に最適な 推薬供給系を検討した。 低電力という厳しい要求条件があったが、アメリカのMOOG社で開発した Proportional Valve および Service Valve を主要部品として選定し、推薬供給系を設計し た。本研究での推薬供給系の構成を図2.4.1に示す。 図2.4.1 推薬供給系のブロック図 図2.4.2に Proportional Valve を、図2.4.3に Service Valve の外観写真を示す。 図2.4.2 図2.4.3 2.4.2 ガスタンクの破壊試験 Proportional Valve Service Valve 人工衛星姿勢制御用小型マイクロ波エンジンのガスタンクは小型軽量かつ高圧のガ スタンクである。今回使用するガスタンクはこれまで宇宙用として製造/試験された ことのない民生品であるため、所定の手続きにもとづいて破壊試験を実施した。タン クの図面を図2.4.4に示す。 図2.4.4 ガスタンクの図面 まず通常の受け入れ試験手順に従い、受け入れ試験を実施した。 続いて、圧力サイクル試験を行った。最大使用圧力 6000 PSIG にて50回の加圧/減 圧サイクル試験を実施し、有害な変形その他問題ないことを確認した。 最後に破壊試験を行った。毎分 10000 PSIG の速度で加圧していき、設計破壊圧力 9000 PSIG で破壊しないことを確認した。実際に破壊した時の圧力は 10809 PSIG であった。 破壊時の写真を図2.4.5に示す。 図2.4.5 ガスタンクの破壊試験後のガスタンク 以上をまとめると、本設計のガスタンクは人工衛星姿勢制御用小型マイクロ波エンジ ンのキセノンタンクに使用可能であることが確認できたことが結論としていえる。 2.5 電子部品の放射線試験 2.1.1CPU 放射線試験 近年、人工衛星はより精度の高いミッションへの要望を高まっており、さらに高性 能・長寿命でなおかつ低コストな衛星が望まれている。それらの要求を満たす最も単 純な解決方法は、制御機器や計測器をそのまま小型化することである。これにより先 に述べた要求を全て実現可能とできるが、最近になって搭載される IC・LSI を小型化 することで新たな問題が提議されるようになってきた。それは宇宙放射線による IC・ LSI への影響である。IC・LSI に放射線があたることにより誤作動が生じた事故報告 は今までも多数挙がっており、人工衛星を開発するにあたってはまずその放射線に強 い CPU を選定する必要がある。そこで我々はその試験をすべく日本原子力研究所高崎 研究所で放射線試験を実施した。 2.1.2放射線試験とは 人工衛星は宇宙放射線(捕捉放射線・太陽宇宙線・銀河宇宙線)を浴び続ける過酷 な環境の中で機能しなければならない。この宇宙放射線環境下に半導体部品を曝して おくと、その特性が次第に劣化していくことが知られている。放射線の影響を評価す る方法としては、人工衛星のミッション期間中に半導体部品に吸収される放射線のエ ネルギー量に基づく「トータルドーズ(積算吸収線量)」による方法が一般的であっ た。 図2.5.1 宇宙放射線環境 近年の人工衛星に搭載される集積回路は、高機能化・小型化の要求に応えるために 集積度が高められており、それだけ内部に流れる電荷量が小さくなっている。そのた め、荷電粒子(例えば鉄イオン)である宇宙放射線が集積回路内を通過すると、その 時に生じる電荷量が集積回路本来の電荷量と同程度になり、入射粒子がたとえ 1 個で あっても集積回路に一時的な誤動作(ソフトエラー)や永久的な損傷(ハードエラー) を引き起こすという現象が 1980 年頃から認識されている。このような現象を、従来 のトータルドーズと区別して「シングルイベント(単発事象)」と呼ぶ。シングルイ ベント現象は、発生する半導体部品、発生機構、引き起こされる現象の違いによって シングルイベントアップセット(SEU:Single Event Upset) 、シングルイベントラ ッチアップ(SEL:Single Event Latch‑up)、シングルイベントバーンアウト(SEB: Single Event Burnout)、シングルイベントゲートラプチャー(SEGR:Single Event Gate Rupture )などに分類される。 前述したように宇宙用の CPU は高速、低消費電力といったパラメータから選定をす るのではなく、こうした宇宙環境におけるシングルイベント現象にどれだけ耐性が強 いか、CPU としてどれだけ安定に周辺機器を制御するかにより決定される。しかしな がら我々が求めている民生部品の CPU は、最近こそは耐放射線設計をする傾向にある らしいが現時点においてはまだ出始めの段階であり、その性能はまだ信頼するに至っ ていない。よって現在市販されている CPU を放射線試験により宇宙環境で使用できる かを評価する必要がある。しかし全ての CPU を試験していたのでは時間とコストがか かりすぎるため、NASA や NASDA が宇宙用 CPU として高く評価されている製品を研究の 用途に合わせ選定するに至った。その結果、独自の調査により Hitachi 製の製品は放 射線環境に強いという評価により H8 マイコンを推挙した(資料)。H8 は周辺機器用制 御に有用な 32bit マイコンであり、これをマイクロサットの CPU として選定し、放射 線試験を行った。放射線試験の内容は CPU、RAM の試験として代表的な SEU と SEL 試 験をおこなった。 2.5.3 シングルイベントアップセット試験について この試験は簡単に言い表すと、放射線が当たることにより ROM・RAM 等のソフトウ エアを記録する記憶素子の状態が反転してしまう現象のことである。メモリ素子など では、入射した単発の荷電粒子によって誤動作が起こり、記憶されていた情報が反転 ( 1”→ 0”あるいは 0”→ 1”)することがある。これがシングルイベントアップセ ット(SEU)という。この時、記憶情報を反転させるのに必要な最小電荷を臨界電荷 (Qc)と呼ぶ。 臨界電荷は回路パラメータに依存し、半導体部品の構造や集積度によって変化する。 また同一の半導体部品であっても、回路に収集される電荷は荷電粒子が誘起する電離 密度に依存し、電離密度は荷電粒子の種類やエネルギーに依存する。従って、SEU 発 生頻度は入射荷電粒子が半導体部品中で電離によって失うエネルギーに依存するこ とになり、各々の半導体部品について荷電粒子が電離によって失うエネルギーに対す る SEU 発生頻度がわかれば、実際の宇宙放射線環境下での SEU 発生頻度を予測できる。 図2.5.2は、荷電粒子が電離によって失うエネルギーに対する反転断面積(SEU 発生頻度)の一例である。単位長さあたりに失うエネルギー(dE/dx)を LET(Linear Energy Transfer)と呼び、単位は MeV/(mg/cm2)あるいは McV/μm で表す。LETth は、スレッショルド LET といって、荷電粒子が電離で失ったエネルギーが臨界電荷と 等しくなる点である。また、反転断面積は、半導体部品に照射された単位面積あたり の荷電粒子数に対して、SEU が何回発生したかで求める。LET が LETth を超えると、 その増加に対して反転断面積は急激に増加して飽和に至る。この時の反転断面積の大 きさを、飽和反転断面積(σs)と呼ぶ。 図2.5.2 スレッショルド LET と飽和反転断面積 2.1.3シングルアップラッチアップ試験について SEL 試験は簡単に言うと、放射線を照射することで半導体上の基盤にある回路が破 壊するかどうかを見るための試験である。 SEL 現象とは、主に CMOS 構造のデバイスにおいて図 1.2‑24 に示すような寄生的に 形成されたサイリスタ構造部位 Q、Q に荷電粒子が誘起する雑音電流が注入され、サ イリスタが ON 状態となり大電流が流れ続ける現象である。この現象が生ずると、寄 生サイリスタ間(図中①から④の間)が短絡し続けるため、電源を一旦切らない限り 大電流が流れ続ける。その結果、二次的にデバイス内の電極溶断、同一電源系統内電 圧降下による機能障害等、重大な結果を招くことになる。 図2.5.3 バルク CMOS における寄生サイリスタ 2.1.4放射線試験試験概要 日本原子力研究所高崎研究所(以下高崎原研)は大型照射施設や各種の加速器によ り、放射線利用や環境保全、資源有効利用と言った研究を行っている研究施設である。 またイオン照射研究施設では、放射線高度利用技術の研究開発を行う日本では数少な い研究機関の一つである。高崎原研の主要な施設として、3MV タンデム加速器や 3MV シングルエンド加速器、AVF サイクロトロン、400kV イオン注入装置など加速器 6 機、 コバルト 60 照射施設や食品照射棟照射施設など照射施設 4 機から構成される。この うち今回使用した施設は AVF サイクロトロンで、主に耐宇宙環境材料、バイオ技術、 RI の製造・利用等の研究開発に利用される。 放射線装置にはサイクロトロン重イオンビームコース HE ラインに設置された 散 乱ビーム照射試験装置”を使用。線種は Ne、Ar、Kr、Xe。装置真空チャンバの到達真 空度は 10‑8Torr を目指す。照射ビームの円直径は 30mm で、供試体を置く治具は可動 式である。 本試験の最終目標は H8/3048 の SEU 発生確率、SEL 発生確率を求めることである。 これを求めるため、放射線試験結果より得られたデータを用いて CREME96 による解析 を行った。CREME96 へ代入するパラメータは主に軌道要素、LETth[MeV/(mg/cm2)]、デバ イスサイズ[μm]、クリティカルチャージ[pC]である。 2.1.5シングルイベントラッチアップ試験 散乱照射ビーム真空チャンバ内に H8/3048 をクロック 16MHz で動作させ、放射線各 種を照射し SEL の発生頻度を計測する。試験項目を表2.5.1に示す。 表2.5.1 SEL 試験項目 SEL/month の求め方につい SEL 試験により照射時間、フルエンス、SEL 発 て 生回数を測定し、半導体デバイスのエラー発生 率予測プログラムである CREME96 へ値を代入す ることで SEL/month を求める。 SEL 発生閾値の設定 SEL 判定条件 通常動作時の電流値の 2 倍 (H8 Typ.50mA⇒100mA) SEL 試験時の環境条件 SEL 試験時の電源電圧 部品仕様書に規定されている最大推奨動作 電源電圧で行う。 SEL 時の温度 常温環境下 SEL 発生時データ取得方法 SEL 発生の閾値を超えると SEL カウントする。 SEL 判定以下でもシステム暴走が起こる可能性 は大いにあるため、電流値が絶対最大定格を上 回った場合は、電流監視装置により CPU 電源を リセットする。またソフトウエアでもシステム を自動復帰させるよう CPU 内部にあるウォッチ ドッグタイマ(WDT)機能を利用して、システム にリセットをかけるようシステム構築をする。 さらに SEL 発生信号 LED や市販電流計を設置し、 SEL 発生時には制御室モニタにより視覚的にも カウントする。データとしては SEL 発生の時間、 電流値の監視、WDT 発生カウントが得られる。 SEL 試験後の動作試験 試験後には SEL が発生したときの影響を調べる ために、RAM/ROM/ポート欠損/ITU/SCI などを調 査し、試験前の状態と比較することで正常動作 を確認する。 2.1.6シングルイベントアップセット 散乱ビーム照射試験装置真空チャンバ内に H8/3048 をクロック 16MHz で動作させ、 放射線各種を照射し SEU の発生頻度を計測する。試験項目を表2.5.2に示す。 表2.5.2 SEU 試験項目 CPU 放射線試験から SEU 発生確率を求めるまでの手順 CPU 放射線試験から SEU 発生確率を求めるまでの手 異なった LET を持つ重粒子イオンを同一ロットの試験 デバイスに照射することにより、各 LET に対する反転 順 断面積の値を求める。 (H8/3048 で使用を考えているイ オン種は Ne、Ar、Kr、Xe の 4 種で、LET―反転断面積 のグラフの作成を意図している。 ) LET―反転断面積のグラフより飽和反転面積と LETth を 求める。 飽和反転断面積よりデバイスサイズを求める。 LETth より臨界電荷量(クリティカルチャージ量)を求 める。 得られたデバイスサイズと臨界電荷量を CREME プログ ラムへ代入。 結果より SEU 発生確率(Upset/day or Upset/sec)を 得る 〜計算式 反転断面積 反転率 フルエンス率×ビット数 エラー数 = 時間(s) × フルエンスレート×ビット数 = (cm2/bit) = エラー数 (cm2/device) 時間( s) × フルエンスレート 飽和反転断面積と LETth はグラフにより決定する。 臨界電荷量(pC) LETth×d×1.04×10‑2(pC) デバイスサイズ (x、y、z)=( αsat , αsat , d ) αsat =飽和反転断面積 SEU 試験時の環境条件 SEU 試験の前準備 SEL 発生時データ取得方法 SEL 試験後の動作試験 d=1(μm) SEL に同じ SEL に同じく、CPU は工場により若干の性能差が出るた め、ロット別に行う。 RAM データの反転をモニタし、反転ビット数をカウン ト。詳細はアルゴリズム(図 5.6)に掲示。 試験後に再度 RAM の内容を試験前の状態と比較するこ とで、正常動作を確認する。 図2.5.4に SEL・SEU 計測装置の概略図を、図2.5.5に SEL・SEU 計測装置を示 す。また、SEL のアルゴリズムを図2.5.6、SEU のアルゴリズムを図2.5.7に示 す。SEL のプログラムは、試供体である H8 は SEU プログラムを動作させた状態で CPU 内を流れる電流の変化を見る。SEL 閾値電流は、基本的に最大絶対定格時の倍の値と する。すなわち H8 では 100mA である。 SEL 試験の際の暴走時の対応としては、SEL 試験では閾値電流以外でも暴走が起こ る可能性は大いにあり、システム暴走を即座に解除しなければならない。本試験装置 では CPU の機能にあるシステム暴走を検知するウオッチドックタイマ(WDT)と電流 測定器による電源リセットの 2 重監視でシステム暴走を解除する。また、SEU 試験の 際システム暴走の対応としては、SEU は基本的に CPU の内臓 RAM の Upset 検出する試 験であるため、システム暴走を即座に解消しなければならず、SEL 試験同様にシステ ム暴走を検地するウオッチドクタイマ(WDT)と電流測定器による電源リセットの 2 重監視でシステム暴走を解除する。 H8 の A/D 測定範囲が 0〜5V であるが、前回の放射線試験結果から定常値 50mA、ラ ッチアップの発生の際には 160mA 程度出力されるという結果が得た。このため万全を 期して 100mA 以上の電流にも許容できるよう設計した。そこで OP アンプは正転増幅 回路とし、増幅率を 20 倍に設計した。つまり 50mA ⇒1V(定常値) 100mA ⇒2V(ラッチアップ時) といった具合である。さらにいったんラッチアップが起こると、H8 に流れる電流が安 定するかは不明なため、ある程度許容させる意味でもこの値に定める事となった。 また万一測定器が破損したときに備え、手動で電源をリセットするスイッチを付加 した。これは電源に電流計(アナログ)が内蔵されており、照射室から目視でき、針 の振れにより SEL をカウントできる。これに合わせ電源にリセットをし、測定器の機 能を手動で行うことを可能にした。 真空チャンバー 試験体 H8/3048F(SH4) GND 5V 5V 1Ω OP284 10KΩ 470Ω 1μF 130KΩ 電流測定用 H8/3048F 0.01μF 6.8KΩ GND ANO I/O(P3‑0) (P7‑0) 5V AG 図2.5.4 SEL 用電流測定器 図2.5.5 SEL・SEU 計測装置 GND POWER SUPLLY スタート H8、SH‑4の電流値を電流測定器により監視 電流値がSEL判定閾値以上 N Y SEL発生カウント+1 電源リセット出力 電流値をデータ保存 図2.5.6 SEL 試験フローチャート スタート RAMに0を書き込む 放置処理 照射時間 RAMの内容をシリ アル送信 2.1.7 図2.5.7 SEL 試験運用 SEU 試験フローチャート SEL 試験運用手順を以下に記す。 ① 治具の設置 ② 配線及び動作試験 ③ 真空引きし、再度動作試験 ④ SEL ソフトをスタンバイし、照射線種 Ar に設定、フルエンスレートの設定試し打ち をし、レートを決定 ⑤ 試験開始。SEL を数回確認後照射終了 ⑥ その結果を見て、SEL が少なければ Kr、多ければ Ne にしフルエンスレートを調整 する 2.1.8SEU 試験運用 SEU の試験運用を以下に記す。 ① 治具の設置 ② 配線及び動作試験 ③ 真空引きし、再度動作試験 ④ SEU ソフトをスタンバイし、照射線種 Ne に設定、フルエンスレートの設定試し打ち をし、レートを決定 ⑤ フルエンスレートを決定後、SEU ソフトにフルエンスレートを代入し試験開始 ⑥ 常時計算されモニタされた反転断面積がほぼ一定してきたとき、頃合を見て照射 を中止する ⑦ 照射線種を Ar に設定しフルエンスレートを決定、同様の試験を行う。 2.1.9SEL 試験規定 本試験 SEL 試験は NASDA‑JEM 用解析方法に一部合わせて試験を行ったもので、これ には「記憶エレメント数の小さい(1000 個未満)被試験部品は、10 万個以上のフル エンス、もしくはイオンの照射ビームの 1 方向について SEU、SET、SEL が 10 個発生 するまで照射されなければならない。」とある。今回行った CPU は 1000 個以上の記憶 エレメントに類するものであるが、これは一般に 2MbitSRAM のような大容量 RAM を指 すものであるため、CPU である H8 は記憶エレメント数の小さい(1000 個未満)被試 験部品として評価した。 2.1 10 解析方法 CREME96 にて評価を行った※1。発生取得データ、反転断面積対 LET グラフに対して 全て最悪値を用いている。解析に使用したグラフは、図2.5.8ある。 ※ 1 CPU の SEL 評価を行うことを目的とした(明記した)ソフトウェアとい うものは、現在のところ存在しない。SEU と SEL の発生メカニズムが異なるのは 事実だが、実際には SEL もクリティカルチャージ量や反転断面積がパラメータと なって影響していることもまた事実である。よって、SEU のときと全く同様の手 順に SEL の発生確率も CREME96 によって算出できるが、その正確性については一 般的な確率論として考える必要がある。 図2.5.8 2.5.11 ① H8/3048 重イオン放射線試験結果 SEL 試験結果及び考察 H8‑SEL 発生時には 250mA(定常 55mA)もの大電流が流れたが、電源再投入 でシステムの正常動作を確認した。H8 では 20 回以上の SEL を確認したが全て 同じ結果を得ることができた。試験後の I/O ポート調査を行ったが故障ポート は一つも見当たらなかった。 ② 電源の再投入のタイミングであるが、試験ではテレビモニターを見ながらの 手動カットオフであったため、検知から再投入までの時間オーダーは 1 無いし 最大でも 2 秒間であったがそれでもシステムは正常に動作していた(SEU プロ グラムを動作させていた)。 ③ SEL 発生条件である 100mA 以上に到達するまでの時間はナノ・マイクロ秒単 位の瞬間的なものではなく、上昇が肉眼でも確認できる数十〜数百ミリ秒単位 であった。 2.5.12 SEL CREME96 解析結果 CREME96 結果は、H8/3048 は最悪でも数十年に一回の確率で SEL の発生が予測され ることがわかった。 また、エネルギー別評価では LET<18 であれば H8/3048 はラッチアップの発生はほ とんどないと予測される。 2.5.13 SEU 試験 取得データ、反転断面積対 LET グラフに対して全て最悪値を用いている。 H8 SEU 試験結果の考察として次の二点が挙げられる。 ① H8‑内蔵 RAM の内容を ALL=00 と ALL=FF で試験を行ったが、ALL=FF の方が圧倒 的に SEU の発生が少ないことが確認された。 ② H8 は製造工場番号の違う型をそれぞれ照射したが、1つは SEU に非常に強い耐 性を示したが、もう1つは照射イオンで最も弱い Ne を照射したが SEU が多数発生 した。 2.5.14 SEU CPU 内蔵 RAM デバイス評価 CPU デバイス単体の評価は他の CPU で同時に試験を行った Cube‑sat の PIC やμ ‑Labsat の H8/3334(5〜8 カ月間に一回 SEU)のデータと比較して SEU の発生確率は高 い。しかし PIC‑RAM、H8/3334‑RAM は H8/3048‑RAM より少なく PIC‑RAM は製品を見て も 902Byte 以下であり、H8/3334 でも 2Kbyte であるため、仮に H8/3048 を PIC と同じ 902byte とした場合 H8/3048 は、11.5 カ月に一回、H8/3334‑RAM2kbyte であれば 5 カ 月に一回 SEU 発生となる。つまり、使用するデータ RAM 領域が小さければ当然 SEU レ ートが下がることになる。このため実用上の使用を考えてデバイスの放射線耐性を予 測する場合は、デバイス単体[SEUs/device/day]での評価よりも、むしろ RAM‑bit そ のものの評価であるビット耐性[SEUs/bit/day]の方がより重要であると考える。この 観点から表 5.3 から比較してわかる通り、H8/3048 は他の宇宙用 CPU と同等の耐性を 持っていることがわかる。 表2.5.3 宇宙用 CPU との比較 CPU H32 i386SX H8/3334 H8/3048 SH‑4 2.3.6 S[SEUS/BIT/DAY] 1.14E‑07 3.84E‑07 4.40E‑06 2.86E‑07 2.87E‑07 飛行軌道 高度 850km 高度 850km 高度 850km 高度 450km 高度 450km 試験モード 不明 不明 RAM ALL=0 RAM ALL=0 RAM 00⇔FF 実機搭載における CPU 内蔵 SRAM 放射線耐性評価 ①組込みシステムを構築するケースで考えると、μITRON、WindowsCE 等の小型リア ルタイム OS を使用しない限りは、RAM を極端に大きく消費することは無いだろう。OS を含まないシステムでは一般に RAM 領域を汎用レジスタと一時的なデータ保存として 使用するため、実際には1Kbyte の RAM 領域もあれば十分にシステム構築が可能であ る。仮に H8/3048 で4Kbyte 中、1Kbyte のみ使用する場合は 10 カ月に一回の SEU 発 生が予測される となり、この場合多数決論理法やプログラム冗長等のフォールドト レランスシステムを構築することで放射線による影響から十分に回避できるものと 考える。 ②大容量 RAM を使用するシステムを構築する場合は、H8 内蔵 RAM は汎用レジスタや 一時データ保管にのみ使用することを考え、放射線に強い大容量 RAM があればそれを 外付けとして使用することも健全なシステム構築する上で一つの有効な手段である と考える。 ③H8‑内蔵 RAM の内容を ALL=00 と ALL=FF で試験を行ったが、ALL=FF の方が圧倒的 に SEU の発生が少ないことがわかった。よってプログラムによるカウンターやレジス タの状態、未使用 RAM の初期状態を FF にすることでよりシステムを安定に動作させ ることができると考える。 ④RAM に長期のデータ保存する場合、H8 の場合4Kbyte の領域があるため一つのデ ータを複数箇所(3つ以上)に点在して記憶しても十分容量に余裕があると考える(内 蔵 RAM の使用条件による)。複数箇所に記憶されたデータを後に多数決によりデータ を取得すれば SEU が発生しても自己復旧という形でデータを補間することができる (データ冗長)。 ⑤CPU に加える電源電圧は、高いと SEU の発生確率が高まり、低いと SEL の発生確 率が高まるという研究報告がある。しかし発生メカニズムが未だ明確ではないため、 実機搭載時には規格に準拠した電圧で実装するのが最良である。 ⑥SEL・SEU 発生確率は低いものの、冗長系による情報保全やラッチアップが起きた 場合での対処が必要である。 2.5.16 まとめ 以上により、本放射線試験により H8/3048 の SEL・SEU 発生確率を求めることがで きた。この結果、低軌道におけるミッションでは重イオン放射線に問題なく使用でき る耐性があることがわかった。ただし SEL・SEU 発生確率は低いものの、冗長系によ る情報保全やラッチアップが起きた場合での対処が必要である。 2.6 2.6.1 マイクロ波エンジンシステムの性能評価 マイクロ波エンジンフライトモデルの設計 マイクロ波エンジン本体の作動点に関する研究結果にもとづいて、タイプBの作動点 をベースにフライトモデルの設計を行った。 マイクロ波スラスタヘッドを製作するに当たり、材質にはステンレスSUS430を 用いた。推進剤のXeの供給方法は従来の放電室にパイプを直接接続して供給する方 法から、放電室の手前に設けられたXeガスを一時貯める層(プレナム層)を設けそ こから、一様にXeガスが出るような構造に変更した。打ち上げ時の衝撃に対する強 度を強くするために、エンジンヘッド開口部と放電室の側壁の絶縁壁に用いるセラミ ックを一体成型とした。中和器は寿命・信頼性から冗長姓を持たせ8個装着し、同様 の理由により点火器は放電室内部に4個配置した。 今回製作したエンジンヘッド(FM)の写真を図2.6.1に、マイクロ波エンジンシ ステムの図面を図2.6.2に、その写真を図2.6.3に示す。 10mm 図2.6.1 スラスタヘッド(FM)の写真 図2.6.2 図2.6.3 マイクロ波エンジンシステム図面 マイクロ波エンジンシステムの外観写真 2.6.2 性能評価試験の結果 実験ではマイクロ波電力を 3W に固定し、Xe 流量及び加速電圧を変化させてビーム 電流を測定した。得られたビーム電流の値からイオン生成コスト、推進剤利用効率を 算出した。 図 2.6.4 にイオン生成コストのグラフを、図 2.6.5 に推進剤利用効率のグラフを示す。 図 2.6.4 図 2.6.5 イオン生成コスト 推進剤利用効率 マイクロ波スラスタ(FM)では、EMとして製作したマイクロ波スラスタと比較し 若干の性能の低下が見られた。その後の詳細な調査の結果、FMではEMと比較して スラスタ開口部の形状が変わったためプラズマの状態が変化しためであることが判 明している。FMではXeガス流量を0.3sccmから0.4sccmにガス流量 を上げたときに、EMで測定した0.3sccm時のビーム電流値とほぼ同じに示す ことがわかっている。 2.6.3 スロットリング時のマイクロ波エンジンの性能評価 加速電圧を変化させて推力と比推力を変えながら作動させることをスロットリン グという。今回得られた性能にもとづいてスロットリング時の性能を評価した。エン ジンの作動条件としてタイプ A とタイプBの両者を考慮し、表 2.6.1 の値を用いた。 評価結果を図 2.6.6 から図 2.6.8 に示す。 表 2.6.1 マイクロ波エンジンの作動条件 Parameters Type‑A Type‑B Microwave Power Power of neutralizer Power of other electronic device Microwave FET efficiency Mass flow rate Ion beam current 5 W 2 W 1 W 3 W 2 W 1 W 0.3 0.5 sccm 0.033 A 0.3 0.3 sccm 0.015 A 0.9 0.7 0.7 0.7 0.5 0.7 Propellant utilization efficiency Acceleration Efficiency Beam divergence loss 図 2.6.6 図 2.6.7 推進効率の電力依存性 推力の電力依存性 図 2.6.8 比推力の電力依存性 以上の結果から、タイプAのエンジンは電力20W以上でのみ作動することがわか る。特に推進効率は28W以下のレンジでは急激に低下するため、タイプBのエンジ ンの方が性能がよいといえる。しかし、電力30W以上では、タイプAの単体性能と してイオン生成コスト150V、推進剤利用効率90%と高性能であることから、タ イプAの方がタイプBよりも有利となる。両スラスタの最適作動条件は次のようにな る。タイプAの場合は、電力33Wの時に、比推力1615秒、推力0.79mN、 推進効率19%となる。タイプBの場合には、電力22Wの時に、比推力1256秒、 推力0.36mN、推進効率10%である。 以上の検討ではマイクロ波の電力変換効率を30%と仮定したが、近年の携帯電話 の急激な普及により、マイクロ波素子(FET)の効率が改善される期待が大きいそこ でマイクロ波の電力変換効率をパラメータにとり、タイプBのスラスタの性能がどの ように改善されるかを評価する。計算結果を図 2.6.9 に示す。特に20W付近では5 0%近い改善効果が期待できることがわかる。 図 2.6.9 FET 効率の性能に及ぼす影響の電力依存性 2.7 2.7.1 熱真空試験 熱真空試験装置 熱真空試験とは宇宙環境の熱環境及び真空環境で衛星部品が正常に動作することを 確認する為の試験である。 (有)先端技術研究所では小型の熱真空試験装置を製作した。この試験装置は、1E-5 Torr 以下の真空環境を維持するための真空装置と、− 75℃〜+75℃の範囲で精度 3℃以内に可変できるコールド板及びその温度制御装置からなる。図 2.7.1 に熱真空 試験装置の構成を、図 2.7.2 にはその写真を示す。 図 2.7.1 熱真空試験装置の構成 図 2.7.2 2.7.2 熱真空試験装置の概観(写真) 試験方法及び結果 エンジン制御装置(電源系および制御系)の熱真空試験として、温度を− 20度から +50度まで変化させ、回路が誤動作しないことを確認するための試験を実施した。 電子基板のスペーサとコールド板接合付近に設けた熱電対における温度を規定温度 として測定した。試験手順は以下の通り。 (1)電子基板に通電しない状態で熱真空試験装置内の真空引きを行う。 (2)試験に必要な真空度に達した後、+60℃まで規定温度を上げて、ベーキング をおこなう。 (3)ベーキング終了後、− 30℃まで規定温度を下げる。 (4)規定温度を− 20℃に保ち、電子基板に通電して熱真空試験を開始する。 (5)− 20℃での電源電流および中和器電流を測定する。 (6)電子基板に通電したままで規定温度を+50℃まで上げる。 (7)+50℃での電源電流および中和器電流を測定する。 (8)試験終了 図 2.7.3 に試験中の温度履歴を示す。 図 2.7.3 規定熱電対(スペーサとコールド板接合付近)における温度履歴 表 2.7.1 には熱真空試験の試験結果を示す。− 20℃及び+50℃の両端点で中和器 電流が規定値におさまっていることから、エンジン制御装置が宇宙環境で使用可能で あることが結論としていえる。 表 2.7.1 時刻 試験モード 電源 12V 電源電流(mA) 中和器電流(A) 19:31 C1 ON 640 1.98 20:01 C1 ON 570 2.24 熱真空試験結果 20:31 C1 ON 570 2.24 21:21 H1 ON 580 2.33 21:51 H1 ON 580 2.33 22:21 H1 ON 580 2.33 真空度(Pa) 規定温度(℃) 2.9×10-4 -22.4 3.8×10-4 -21.0 3.8×10-4 -21.5 8.0×10-4 50.1 8.0×10-4 50.9 8.0×10-4 51.1 2.8 ランダム振動試験 第4章 目的 マイクロ波エンジンスラスタヘッドの打ち上げ時における機械環境への耐久性を 検証する。 1.1.1 実験概要 (1)実験日時 平成 12 年 12 月 8 日(金曜日) (2)実施場所 エミック株式会社 三島事業所 (3)実験状況 ロケット打ち上げ時、エンジン噴流による音響振動は、ランダム振動として分離部 をとおして衛星に直接作用する。また、大気中を飛行するときは、遷音速飛行時の圧 力変動が音響となって、フェアリングをとおして衛星に作用する。これらのランダム 振動は衛星構体に二次的な振動をもたらし、二次構造や搭載機器に厳しい環境を与え る恐れがある。本実験はこの状況を模擬するため、振動試験機にランダムな入力を加 えて実施した。 (4)実験器具 本振動試験の動作原理を図 2.8.1 に示す。電磁式振動試験装置はスピーカーとアン プの組み合わせとほぼ同じ原理を用いている。図 2.8.1 に示されているように、自動 振動制御装置で作成した信号を電力増幅器で増幅し、振動発生機に供給する。振動を 開始した振動発生機に締結した治具上の加速度ピックアップが振動を捕らえる。振動 は電気信号に変換され、プリアンプを経由し自動振動制御装置にフィードバックされ る。自動振動制御装置は、波形のパターン、レベル等を補正して電力増幅器へ供給す る。この流れを繰り返し、予めセットした振動パターンになるように制御を繰り返し、 目標の振動条件になる作業を自動制御装置に内蔵された CPU が行う。 また、本実験に使用した実験装置外観写真ならびにマイクロ波エンジンスラスタヘ ッド外観写真を図 2.8.2、図 2.8.3 にそれぞれ示す。使用した装置をいかに列挙する。 ・振動試験装置 F‑1000BD/FA 振動試験装置の仕様を表 2.8.1 に示す。 ・圧電型加速度ピックアップ 702‑B3(3 方向), 701‑B(1 方向) ・5 チャンネルチャージアンプ ・DCS‑7800 型デジタル振動制御装置 図 2.8.1 図 2.8.2a 振動試験作動原理図 試験装置外観写真(z軸方向加振) 図 2.8.2b 図 2.8.3 試験装置外観写真(x軸方向加振) マイクロ波エンジンヘッド外観(右は 1cm 角立方体) 表 2.8.1 振動試験装置の仕様 (5)実験スケジュール 実験スケジュールを表 2.8.2 に示す。 表 2.8.2 実験スケジュール (6)計測項目 計測項目を表 2.8.3 に示す。また、本実験におけるランダム振動パワースペクトル 密度(PSD)を AT 振動試験、QT 振動試験について、それぞれ図 2.8.4、図 2.8.5 に示 す。ここでの許容幅(±1.5dB、±3.0dB)は MIL‑STD‑1540C による。 表 2.8.3 図 2.8.4 計測項目 AT ランダム振動入力 図 2.8.5 QT ランダム振動入力 ぞれ確認された。以下に、各軸加振ごとの振動応答結果の概要を述べる。 図 2.8.6 に示されているように、z 軸方向 QT 加振において、入力された振動は図 2.8.5 に示されている振動とほぼ一致している。これは実際にスラスタヘッド本体に 打ち上げ時の音響負荷が加わったことを意味している。z 軸方向 QT 加振後の外観チェ ックでは中和器に付着されているカーボネートのはがれ落ちや外傷は観察されなか った。また MS ネジ(No.4)の計7本のトルクも維持さているのが確認された。以上 から、z 軸方向加振について、スラスタヘッ x 方向加振と同様に、入力振動は設定と おりであり、実際にスラスタヘッド本体に打ち上げ時の音響負荷が加わっているのが わかる。y 軸方向加振後の外観、トルクチェックにおいても、x 軸、z軸加振後の結 果と同じく、異常は発見されなかった。 表 2.8.4 試験結果 図 2.8.6 z方向のQT加振の振動入力 図 2.8.7 x方向のQT加振の振動入力 図 2.8.8 y方向のQT加振の振動入力 2.8.4 結論 本実験ではマイクロ波エンジンのスラスタヘッドにおいて、打ち上げ時の機械環境 への耐久性を検証した。x、y、z の各軸方向にランダム振動を負荷し、スラスタヘッ ドの振動応答を測定した。それと同時に、目視による外観のチェック、中和器に付着 されているカーボネートのはがれ落ちの有無を観察し、加えて MS ネジ(No.4)のトル クも管理して行われた。以下に本実験の結論を述べる。 3 打ち上げ時の機械環境(10‑2000 Hz)でのスラスタヘッドの耐久性が確認された。 (2)本振動試験後のスラスタ機能テストでは、正常の機能を示し、性能においても 打ち上げ時の音響環境に耐えることが実証された。 2.9 無重力下における電気推進の作動実証試験 2.3.7 目的 微小重力、真空の環境におけるプラズマスラスターの飛行実証を行い、そのプラ ズマスラスターの飛行をビデオ撮影する。加えて、現在開発中であるマイクロ波エン ジンの加速原理の実証も行うという意義がある。 1. 実験概要 JAMIC において行われた微小重力実験に用いられたプラズマスラスターの原理図 を図 2.9.1 に示す。このプラズマスラスターでは、放電室の上流に配された加速電極 と下流の中和器電極の間での直流放電によりプラズマが生成され、静電界勾配により、 イオンが加速され推力が発生する。この実験のスケジュールを表 2.9.1 に示す。本実 験では、落下 3 分 23 秒前に中和器加熱が開始され、落下後 2 秒後にスラスタの分離、 点火が行われ、8 秒間の微小重力場での飛行が 2 台の CCD カメラにより撮影された。 また、本実験の概観図が図 2.9.2 に示されている。この実験装置においては、真空で 微小重力という宇宙環境を模擬するために、ガラス直管の中に、プラズマスラスター、 中和器、分離機構が配備されており、ホルマル線から外部電源の供給が行われた。2 台の CCD カメラはガラス直管の外に配置され、プラズマスラスターの飛行の撮影が行 われた。 図 2.9.1 プラズマスラスタの作動原理図 図 2.9.2 実験装置の外観図 表 2.9.1 実験スケジュール 1 -185分 真空ポンプ作動開 始 5 -3分21秒 中和器制御開始 2 -165 分 中和器の予備点火 (5秒間) 6 0 分 落下開始 3 -65 分 真空ポンプ作動停 止 7 +2 秒 プラズマスラスター 分離 4 -60 分 実験装置受け渡し 8 +3 秒 プラズマスラスター 点火 2.3.8 計測項目 本実験では、プラズマスラスターの飛行映像から推力が計算された。加えて、ス ラスタに接続されているホルマル線の剛性を考慮した計算、地上での振り子を模擬し た移動距離の測定からも推力が計算され比較された。これらの計算に使った式を表 2.9.2 に示す。 表 2.9.2 推力見積りの計算式 微小重力場での等加速度 地上での振り子実験 運動 2 X=1/2at F=mgtanθ 2 F=ma=2mx/t θ:振り子の振れ角 X: 移動距離 m: スラスターの質量 F: 推力 a: 加速度 g: 重力加速度 梁理論 X =FL3/(3EI) = 64FL3/(3Eπd4) L: ホルマル線の長さ I: ホルマル線の断面2次モ ーメント d: ホルマル線の直径 2.3.9 実験結果と考察 (1)平成 12 年 12 月 18 日実施分 この微小重力場でのプラズマスラスターの飛行の様子が図 2.9.3 に示されている。 ここで t=0 秒は、プラズマスラスターを分離、点火した際の時間を意味しており、そ れからの時間変化に伴って飛行移動するプラズマスラスターの様子が観察された。時 間の経過に伴って、明るく輝くプラズマの領域が不均一になっていき、t=1.73 秒で中 和器付近での輝度が大きくなった。これは、時間経過に伴って、ガラス直管内での真 空度が悪化していき、イオンの拡散が偏って起こったためと考えられる。 図 2.9.3 プラズマスラスターの飛行画像(H12.12.18) また、本実験から見積もられた推力値を表 2.9.3 に示す。ここで微小重力実験に 示されている値は、プラズマスラスターの飛行映像から計算された推力である。各計 算結果において、オーダーの等しい推力が得られた。一方で、これらは現在開発中の マイクロ波エンジンにおける推力と同じオーダーの推力値である。これは、プラズマ 生成電力当たりの推力値と使用した燃料の分子量の比を用いて、マイクロ波エンジン の推力値からの推定が行われ、同じオーダーの推力値が得られたことから、妥当な推 力値であることが示された。 推力(mN) 表 2.9.3 推力計算結果(H12.12.18) 微小重力実験 地上振り子実験 0.32 0.20 梁理論 0.14 (2)平成 13 年 1 月 26 日実施分 この実験では 12 月 18 日の実験とは異なり、分離と同時に点火は行われず、分離後 1 秒 間経過してから点火が行われた。これは、無重力場におけるホルマル線のつりあい位置を 確認するために行われた。この度の飛行映像から、ホルマル線の釣り合い位置は、分離時 のスラスターの位置とほぼ一致し、これにより、スラスターの移動は、ホルマル線のバネ剛性 により起こったものではなく、純粋にプラズマスラスターの推力によって行われたものであると 結論された。 また、本実験から見積もられた推力値を表 2.9.4 に示す。ここで微小重力実験に示されてい る値は、プラズマスラスターの飛行映像から計算された推力である。各計算結果において、 オーダーの等しい推力が得られた。一方で、これらは現在開発中のマイクロ波エンジンにお ける推力と同じオーダーの推力値である。これは、プラズマ生成電力当たりの推力値と使用 した燃料の分子量の比を用いて、マイクロ波エンジンの推力値から推定され、同じオーダー の推力値が得られたことから、妥当な推力値であることが示された。今回の計算結果は、前 回の実験結果と同じオーダーの推力値が得られたことから、マイクロ波エンジンの加速原理 の実証となった。 推力(mN) 表 2.9.4 推力計算結果(H13.1.26) 微小重力実験 地上振り子実験 0.32 0.20 梁理論 0.14 (3)平成 13 年 3 月 6 日実施分 この実験でも前回と同様に時間変化に伴って飛行移動するプラズマスラスターの様子が 観察された。これまでの実験同様、プラズマスラスター分離後 1 秒間の間に、プラズマスラス ターの移動は観察されず、ホルマル線の微小重力場における釣り合い位置が分離時とほぼ 等しい位置に置かれていることが確認された。 また、本実験から見積もられた推力値を表 2.9.5 に示す。ここで微小重力実験に示されてい る値は、プラズマスラスターの飛行映像から計算された推力である。今回の実験結果は、前 回(12/18、1/26 実施分)の推力値の約 1/4 になっており、推力の低下が示された。これは加 速電源に流れ込む電流を低下させたためで、得られた推力値も、その電流低下分に相当 する値に妥当な値となってい 表 2.9.5 推力計算結果(H13.3.6) 微小重力実験 地上振り子実験 0.08 - 推力(mN) 梁理論 0.03 (4)平成 13 年 3 月 15 日実施分 プラズマスラスターを点火した直後より、それからの時間変化に伴って飛行移動するプラズ マスラスターの様子が観察された。今回の実験では、分離後、点火までの 1 秒間、スラスタ ーが進行方向に移動した。これは、微小重力場におけるホルマル線の釣り合い位置が前回 の実験とは異なり、分離時の位置とは全く違う場所に位置していたために起こったと考えら れる。これにより、点火までの 1 秒間で、ホルマル線のバネ剛性によってプラズマスラスター が移動し、推力の計算が不可能になってしまった。しかし、この映像から、ホルマル線の釣り 合い位置のずれのみによるプラズマスラスターの移動が明白なものとなり、前回までの一連 の実験(12/18、1/26、3/6 実施分)におけるプラズマスラスターの移動はホルマル線のバネ 剛性によるものではなく、発生された推力のみに起因することが証明されたことになる。 2.3.10 結論 本実験では、微小重力、真空の環境におけるプラズマスラスターの飛行実証が行 われ、プラズマスラスターの推力値が各測定方法から見積もられ、比較された。4回 にわたる試験を通しその再現性も確認きた。これら計算値のオーダーの一致から、プ ラズマスラスターの微小重力空間における飛行は推力のみによって引き起こされた ものであることが判明した。加えて、現在開発中のマイクロ波エンジンの加速原理が 実証されたことになる。 2.10 マイクロ波エンジンの実用化 本研究開発で開発したマイクロ波エンジンが重量50〜100キログラムの小型 衛星が必要とする力積を発揮できるかどうか現在寿命試験中である。図2.10.1 に本事業で製作したマイクロ波エンジンフライトモデルの写真を示す。振動試験など の機械環境試験や性能試験で目標とする性能が発揮されていることは角に確認済み である。既に米国、韓国、中国等の小型衛星メーカー数社から引き合いが来ているこ とからも、試験で実証されればニーズに適合した製品になると考えられる。 図2.10.1 マイクロ波エンジンフライトモデルの写真 本エンジンと競合する製品は未だ開発されてはいないが、使用目的の異なる電気推 進機は1つだけ存在する。その異なる推進機と比べた結果を表2.10.1にしめる が、圧倒的に本推進機は性能がよい。 表2.10.1 製品名 マイクロ波エンジン PPT(既存製品) 電力利用効率 10%以上 2〜3% 本製品と既存製品との比較 比推力(燃費) 1000秒以上 500秒 特徴 連続噴射 パルス噴射 事業化については、顧客のニーズに合わせて電気推進機を単体で販売、あるいは電 気推進システムとして販売する形態を考えている。当該製品は軌道上実証を経てはじ めて信頼性を得ることが出来るため、現在、平成13年11月の米国小型衛星への搭 載に向けて調整作業を進めている。 当該製品の想定されるユーザーは、海外の小型衛星メーカー、国内外の宇宙機関 (NASA、NASDA 等)、研究機関、大学などである。 将来、受注を受けた場合、電気推進機の製造に関しては本プロジェクトの研究体制 を基本的に維持して製造する。ただし性能に重要な影響を与えない部品などは軌道上 実証の結果を見ながら適宜変更していくことを考えている。 結論 本研究開発の成果を以下にまとめる。 3 エンジン本体の設計・開発 3個の試験用エンジンの製作を(有)札幌金型が行い、(有)先端技術研究所の真空 チャンバーで性能を評価した。3種類のエンジンのうち、マイクロ波電力が5Wで作 動可能なタイプと3Wで可能なタイプが実用化できることを確認し、本プロジェクト では3Wタイプで設計仕様を確定した。 4 電源系・制御系の設計開発 電源系はエンジン本体を作動させるもので、中和器ヒーター電源、点火器ヒーター電 源、加速電源から構成される。制御系はエンジンを作動させるための電源及び推薬供 給系の作動シーケンスを制御する回路である。CPU には宇宙放射線に耐性のあるH8 を用い、ビット反転(アップセット)とショート現象(ラッチアップ)に対し、回路 とソフトの両面から対策を施した。宇宙仕様の電源系及び制御系の電子回路基板を開 発することができた。 5 推薬供給系の設計・開発 低電力という厳しい要求条件が課せられたが、アメリカ企業が開発した小型電磁バル ブを主要部品としてエンジンに一定流量のキセノンガスを供給するための装置(推薬 供給系)の開発に成功した。 (4)電子部品の放射線試験 高崎原研の加速器を用いて、制御系に使用する CPU にイオンビームを照射し、素子 内のビット反転(アップセット)とショート現象(ラッチアップ)の頻度を測定した。 試験の結果、H8という素子が低軌道におけるミッションでは宇宙放射線に対し問題 なく使用できるだけの耐性があることが分かった。 2 熱真空試験 熱真空チャンバー内に電源系・制御系からなるエンジン制御装置を入れて-20〜+5 0℃まで温度環境を変えて試験を行い、宇宙環境で使用可能であることを実証した。 (6)振動試験 エンジンヘッドのランダム振動試験を実施し、ロケットの打ち上げ時の機械環境で破 損しないことを実証した。 (7)無重力下における電気推進作動試験 地下無重力実験センターの設備を利用し、マイクロ波エンジンの加速メカニズムが有 効に推力を発生することを実証した。
© Copyright 2026 Paperzz