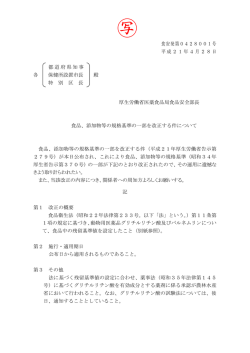
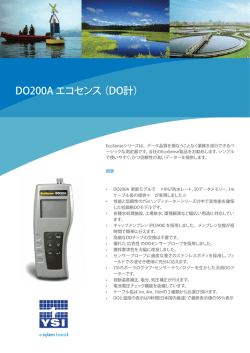
卒業研究 ティコ第2星表を用いた 限界等級の測定 宇宙粒子研究室 10961028 学籍番号 竹川 涼太 1 目次 1 2 3 4 5 目的・・・(3) 内容・・・(3) 等級とは・・・(3) 赤道儀とは・・・(4) 実験方法・・・(4) 5.1 5.2 5.3 5.4 6 7 8 撮影機材・・・(4) ティコ第2星表・・・(6) ppm 形式・・・(6) 方法・・・(7) 5.4.1 フローチャート・・・(7) 5.4.2 撮影・解析方法・・・(7) 結果・・・(14) まとめ・・・(15) 今後の課題・・・(16) 9 謝辞・・・(16) 10 作成したプログラム・・・I 10.1 バックグラウンドを補正するプログラム・・・I 10.2 星を抜き出すプログラム・・・VIII 2 1.目的 市販のカメラと望遠鏡を利用して撮影した画像を解析し、星表と自動マッチン グすることにより限界等級を導出する 2.内容 北極星付近を露光時間30秒で撮影し、ティコ第2星表とマッチングするプロ グラムを開発する 3.等級とは 天体の明るさを表す尺度で、古代ギリシアの天文学者ヒッパルコスが最も明る い恒星を 1 等星とし、かろうじて肉眼で見える暗い星を 6 等星としたのが起源 です。 その後16世紀に望遠鏡が発明されると、6 等星より暗い恒星が観測できるよう になった。6 等星より暗い星は7等星、8等星などと分けられたが、その分類は 天文学者によって異なっていた。 19世紀の天文学者が測定した結果、1 等星と 6 等星の明るさの差がおよそ10 0倍であることが分かり、1等級が 倍に相当すると定義した。 19世紀以降、天体が写真に撮られるようになると、人間の目と写真では明る さの感度に違いがあることが明らかになった。写真では青色に強く感光するが 黄色には感光しにくい。したがって、写真の像から等級を測定すると肉眼での 観測から求めた等級と異なることになる。このため、肉眼での観測から得られ た等級を実視投球、写真によって判定された等級を写真等級と呼んで区別する ようになった。 3 4.赤道儀とは 天体の日周運動を追尾するための回転軸を持った天体望遠鏡用の架台である。 星を安定して追尾できることに主眼を置いた装置のため一般に頑丈で重く、使 う前にセッティングも必要である。 今回使用するのは一般にポータブル赤道儀と呼ばれ軽く、セッティングも容易 である。ただし、追尾可能時間は赤道儀に劣ります。 図4.赤道儀使用時の比較画像 図は今回の観測で使用するポータブル赤道儀ポラリエの動作確認時に撮影した 230 秒露光のオリオン座の画像です。 ポラリエ使用時は星が点になっているのがわかります。 5.実験方法 5.1.撮影機材 カメラ:Canon EOS 7D(※図 5.1.1) 撮像画面サイズ:22.3 × 14.9mm 有効画素数 :5184 × 3456 px 4 望遠鏡:デジボーグ 71FL(※図 5.1.2) 焦点距離:400mm, F値:5.6 Canon EOS 7D に使用した場合、約 4.1×2.7°の範囲を写すことが可能にな ります。 赤道儀:ポラリエ(※図 5.1.3) 図 5.1.1 図 5.1.3 図 5.1.2 5 5.2.ティコ第2星表 250万を超える恒星の位置、固有運動、光度の情報を含んでいる。重星は基 本的にひとつずつ掲載しており、0.8秒角の間隔があるものまでは両方の情報 を含んでいる。11 等星までの恒星で99%の精度を持っている。 欧州宇宙機関のヒッパルコス衛星によって等級と位置のデータは集められ、テ ィコ星表と同じ観測方法を使っているがより進んだ画像技術によってさらに精 密に多くの星を扱っている。 固有運動の正確性は天体図と143のその他の地上天文台星表との比較で2. 5ミリ秒角/年である。位置の精度は 7 秒角におさえ、すべての星を総合して も60秒角程度の誤差である。光度の精度は9等星より明るい星は0.013 等級までの誤差であり、それ以外も含めると0.10等級までの誤差である。 5.3.ppm 形式 pnm という画像フォーマットのうちの一つで異なるプラットフォーム間でも高 い互換性を保てる画像形式として開発された。 プレーンテキストとして電子メールで送受信でき、ASC II コードが廃れた後で も使える画像フォーマットを開発する目的で考案された。 テキスト形式のデータは、テキストエディタで見るのも、ほかの形式に変換す るのも容易である。また、圧縮は行なわないため、画像の劣化を回避できる。 図 5.3.1 は ppm 形式をテキストエディタで表示した例 である。 P3 1行目はファイス形式を、2行目は横・縦のピクセル数 を、 3行目は最大輝度値を4行目以降は各ピクセルの RGB 別の輝度値をそれぞれ表している。 図 5.3.2 は図 5.3.1 をグラフィックエディタで表示した 例である。 255 32 255 0 0 0 255 0 0 0 255 255 255 0 255 255 255 000 図 5.3.2 6 図 5.3.1 5.4.方法 5.4.1 フローチャート 5.4.2 撮影・解析方法 ①図 5.4.2-1 のように撮影機材をセッティングし、北 極星付近を露光時間30秒で撮影する 図 5.4.2-2 が撮影画像、図 5.4.2-3 が階調を反転した 画像です ②グラフィックエディタなどを使用し jpg 形式から pnm 形式に変換する 図 5.4.2-1 撮影装置 7 2.7° 4.1° 図 5.4.2-2 撮影画像 図 5.4.2-3 階調反転した撮影画像 8 ③背景の明るさはレンズの特徴や月明かり、人工光などによってムラがある。 そのため、C 言語を使用し背景を評価するプログラムを作成する。 図 5.4.2-4 図 5.4.2-4 の黄色い範囲の平均を求め、その値を赤いピクセルのバックグラウン ドの値とみなす。この操作を全ピクセルに適応し、元画像からその値を引く。 このままだと、星あかりも見にくいため画像の明るさを10倍する。 図 5.4.2-5 が背景を補正した画像です。 図 5.4.2-5 9 この時のヒストグラムの変化が図 5.4.2-6 である。 図 5.4.2-6 ④星を抜き出し、撮影画像から位置と明るさを算出する。 画像の左上を原点(0,0)、下方向を x 軸、右方向を y 軸とし星の位置情報を抜 き出す(図 5.4.2-8) 。星が広がっている範囲の輝度値の総和を星の明るさとして 撮影画像から算出し表にまとめる。 図 5.4.2-7 星を抜き出した画像 10 図 5.4.2-8 星の位置情報の例 元画像 星を抜き出した画像 図 5.4.2-9 拡大図 11 図 5.4.2-9 を見ると③・④の処理をすることにより元画像では分かりにくかった 暗い星も抜き出せていることがわかる。これにより、約3万個の点が星として 抜き出せた。 ⑤ティコ第2星表とマッチングする 図 5.4.2-10 図 5.4.2-11 ティコ第2星表は位置情報として図 5.4.2-10 のように赤経α・赤緯δが与えら れている。 北極星付近の微小区間なので平面だと仮定し図 5.4.2-11 において = = ・・・(1) = ・・・(2) となる ④において星の位置を(x,y)で抜き出しているので 12 図 5.4.2-12 図 5.4.2-12 のように原点の補正値を A,B、回転角 θ、星までの距離を 、 とお き とすると (X,Y)と(x,y)の関係を回転行列を使い = ・・・(3) と表せる (1)(2)(3)を使い基準星から A,B,C,θを求め、すべての星を変換する 13 6.結果 暗 明 暗 明 暗 明 図 6-1 ティコ第2星表と撮影された星の明るさの相関図 14 図 6-2 図 6-2 の赤丸の部分は写真上では暗く、ティコ第2星表上では明るくなってい る。これはティコ第2星表には 13 等級より暗い星が載っていないため、近くに ある明るい星として認識されたためだと推測される。 青丸の部分は写真上での明るさを出す際に 1 ピクセルあたりの輝度値が最大に なっていたため正確な明るさが出ていないので実際はグラフの右側にある点が 左にシフトしてきたために発生した誤差だと推測される。 7.まとめ 星の撮影時にポラリエを使い星を点像で写すことができたので、後の解析がス ムーズにできた。 撮影画像を処理し、星を抜き出すソフトを開発した。 ティコ第2星表と撮影された星の明るさの相関図を出し、等級を算出した。 撮影画像には約 13 等級まで撮影できていて 11 等級までマッチングできている ことが確認できた。 15 8.今後の課題 ティコ第2星表には約 13 等級までしか載っていないため、今回の撮影画像の解 析では限界等級は求まらなかったのでより暗い星の情報まで載っている星表を 用い、限界等級を求める。 9.謝辞 本研究を進めるにあたり、先生方には適切なご指導を頂きました。特に山本先 生には忙しい中時間を割いて協力していただきました。また、梶野先生からも 意見を頂き、同研究室の院生や同期の方々にも手伝ってもらいました。 みなさんのおかげでこの論文を書くことができました。本当にありがとうござ いました。 16
© Copyright 2026 Paperzz