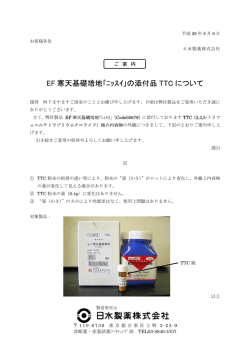
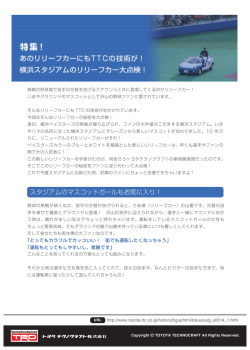
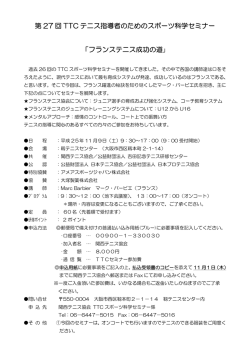
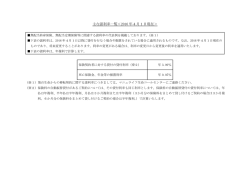
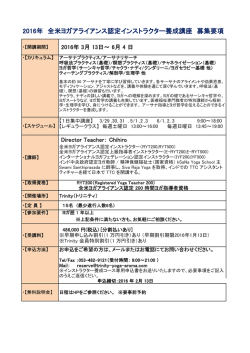
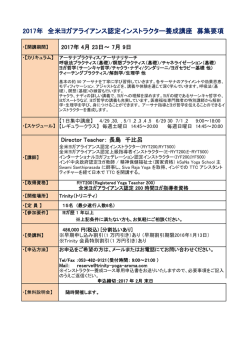
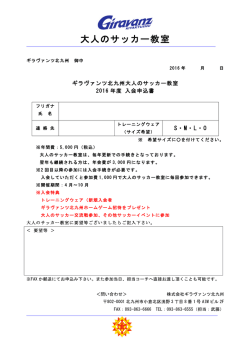
JARI Research Journal 20161204 【研究活動紹介】 交通事故低減詳細効果見積もりのための シミュレーション技術の開発概要 Development of Simulation Technology for Estimation of Traffic Accident Reduction Detailed Effects 安達 章人*1 Akito ADACHI 1. はじめに 大田 浩之*1 Hiroyuki OTA した場合のマクロ的な事故低減効果の算出を目的 自動車の普及に伴う交通事故や交通渋滞は,甚 とするため,前者の「交通環境再現型」を開発す 大な社会的損失をもたらしており,2015年の全国 る. の交通事故死者数は,4,117人で,15年ぶりに増 また,現実の交通現象をシミュレーションで再 加となった.政府は「2018年を目処に交通事故死 現させるためには,ドライバや歩行者などの交通 者数を2,500人以下とし,2020年までには,世界 参加者が,それぞれ知覚・認知・判断・操作の一 で最も安全な道路交通社会を実現する」ことを掲 連の行動を自律的に実施する主体 (エージェント) げているが,既存の取組だけでは抜本的な解決が となり,相互の行動に影響し合うマルチエージェ 難しく,新たな取組である自動走行システムへの ント型シミュレーションモデルを開発する必要が 期待が大きい.この自動走行システムの早期の実 ある. 用化・普及促進に向けては,自動走行システム導 全体開発計画(全 4 年間)を図 1 に示す. 入による交通事故低減効果の訴求が必要であり、 平成 27 年度は,事故シナリオとして単路での そのためにはコンピュータ・シミュレーションに 追従・追突シーンを対象に,運転支援システムと よる定量的評価が有効と考えられる. して衝突警報/ブレーキシステムを実装した車両 一般財団法人日本自動車研究所(JARI)は,戦 のシミュレーションモデルの開発を行う.まずは, 略的イノベーション創造プログラム(自動走行シ 個々の事故シナリオ毎に妥当性を検証するために, ステム)の「交通事故低減詳細効果見積もりのた 「事故場面特化型」での開発からスタートさせる めのシミュレーション技術の開発及び実証」研究 が,年度毎に,事故シナリオ,運転支援システム 事業1)を受託し,中立,公平な立場を生かして, の拡充を図り,最終的には,ある広域化されたエ 産官学連携の中核として本事業を推進している. リアにて,自動走行システムを導入した場合の事 本稿では,平成27年度成果2)の概要を紹介する. 故低減効果を算出できる「交通環境再現型」の開 発につなげていく. 2. 研究開発方針 交通事故を再現するシミュレーションには,以 下の 2 つの分類がある 3).1 つ目は,実交通流を 広域に再現し,そこで発生するさまざまな事故を 抽出するマクロ的な「交通環境再現型」,2 つ目は, 実事故発生場面のデータをもとに,各当事車両間 の位置関係や速度を再現するミクロ的な「事故場 面特化型」がある.本開発においては,さまざま な事故場面を再現させ,自動運転システムを導入 *1 一般財団法人日本自動車研究所 図 1 全体開発計画 ITS研究部 - 1 - JARI Research Journal (2016.12) 3. シミュレーションの開発 そして,ログ出力モジュールは,シミュレーショ 3. 1 全体構成 ン実行結果を分類して出力処理する. 本事業で開発するシミュレーションモデルの全 体構成を図2に示す.このシミュレーションでは, 3. 3 ドライバエージェントモデルの開発 車両や歩行者などの交通参加者がそれぞれエージ 事故要因の大半はドライバのミスによるところ ェントとして行動し,相互に作用しあい、多様な が大きく,精度の良い事故低減効果を算出するた 交通事象を再現する(マルチエージェント型シミ めには,多様な実ドライバの行動を,忠実に表す ュレーションモデル).また,特定の事故形態や支 ことができるドライバエージェントモデルの開発 援形態に限定した交通事故低減詳細効果を評価す が必要である.追従・追突シーンのドライバエー る機能だけではなく,さまざまな道路形状や道路 ジェントモデルの概念(知覚・認知→判断→操作) 線形などが存在する実際の道路交通環境において を図3に示す. も全体的に評価する機能を兼ね備えるものである. 平成27年度は交通事故低減詳細効果の評価を主 眼において開発を行うが,将来的には,交通事故 低減に伴う交通渋滞の減少などに関する効果評価 にも応用できる拡張性を備えるものとする. 図3 ドライバエージェントモデルの概念 知覚においては,中心視野で知覚対象物の位置 や速度を認知し,周辺視野で知覚対象物の存在の みを認知する.首振り,ミラー確認,脇見につい ては,その時間・タイミングなど,実ドライバに 合うように分布によって確率的に設定できるよう にした.例えば,脇見については、図4の通り, 図2 シミュレーションモデルの構成 脇見の継続時間と脇見の間隔を,分布に基づき確 3. 2 シミュレーション基盤の開発 率的に決められるようにモデル化を行った. 本事業にて再現する追突,歩行者横断,車線逸 脱の 3 つの事故場面の再現,及び交通環境再現に 共通で使用される機能に関して,シミュレーショ ン管理モジュール,道路環境管理モジュール,ロ グ出力モジュール,及び,車両と歩行者のエージェ ントモデルを開発した. シミュレーション管理モジュールは,シミュレ ーションに対する処理実行条件や入力情報(シナ リオファイルなど)を読み込んで全体制御を行い, 道路環境管理モジュールはシミュレーションで使 用される道路情報を読み込み(平成27年度は擬似 図4 脇見のモデル化 的に生成) ,道路上の各インスタンス管理を行い, - 2 - JARI Research Journal (2016.12) 認知において,知覚で取得した対象に対して, 3. 4 運転支援システムモデルの開発 対象物の種類,位置,距離,速度などをラベル付 けすることにより表現した. 平成27年度の開発においては,追従,追突時に 動作する運転支援システムとして以下に示す3つ 判断においては,先行車との相対速度,車間距 のシステムを実装した. 離に基づいて加減速を行うヴィーダーマンモデル (追従モデルの一種)4)を実装した(図5) . ① 衝突警報システム センサの検知範囲内に先行車両,歩行者が入り, 指定された作動条件を満たした場合に警報を出力 車間距離 upper 4 W VR W VR upper 7 0.003 する.表 1 に作動条件となる項目一覧を示す.表 0.003 希望速度まで加速 /等速 中の検知幅,作動最低相対速度,作動最低速度, 希望速度まで加速 /等速 空走 upper2=GapTimemax×自車速度 =3.6×自車 upper 3 min Dist 追従 作動最大速度,作動 TTC(Time To Collision:衝 追従 希望速度まで加速/ 等速 先行車Brake ONの場合は追従 upper8=VR2 /(2*|aMin|) + minDist 減速(対先行車) 空走 減速(緊急回避) 突予測時間) ,検知必要時間をすべて満たした場合 に,作動遅れ時間後に警報を ON とする. upper1=GapTimecr×自車速度 =1.0×β×自車速度 減速(緊急回避) VL < VS VL > VS 自車の方が速い 先行車の方が速い minDist 相対速度 ② 緊急ブレーキアシストシステム VR(=VL-VS) センサの検知範囲内に先行車両,歩行者が入り, 図5 追従,追突時のヴィーダーマンモデル 指定された作動条件を満たした場合に,ドライバ 操作については,アクセル操作とブレーキ操作 のブレーキ出力値を増強して出力する.作動条件 は衝突警報システムと同様(表 1)であるが,更 に加え,それらの踏み替え時間も考慮した. ドライバのエラーに関しては, 「知覚・認知」に おいては「脇見」 , 「判断」においては「必要な減 にドライバがブレーキペダルを踏んだ場合にのみ 作動する. 速度の誤りなどの判断ミス」 ,「操作」においては 「ブレーキ操作誤りなどの操作ミス」などを実装 ③ 被害軽減ブレーキシステム した. センサの検知範囲内に先行車両,歩行者が入り, また, ドライバの運転行動には多様性が見られ, 指定された作動条件を満たした場合に,減速度の 内的要因が大きく影響するため,内的要因(個人 値を出力する.作動条件は衝突警報システムと同 差,個人内差)を表現するために,図6に示す4つ 様(表 1)である. のドライバ属性を設定した.シミュレーション上 に車両が出現する毎に,そのドライバーに,4つ 表 1 衝突警報/被害軽減ブレーキの作動条件項目 の属性のレベルがある分布5)に基づいて引き当て 作動条件項目 単位 られ,それらのレベルに応じて,ドライバの知覚・ 検知幅 [m] 作動最低相対速度 [km/h] 作動最低速度 [km/h] 遵守傾向が低く,また,運転スキルが高いドライ 作動最大速度 [km/h] バーほど,制限速度を超過する傾向になる. 作動 TTC(対先行車) [s] 作動 TTC(対静止車) [s] 作動遅れ時間 [s] 検知必要時間 [s] 認知,判断,操作行動が決定される.例えば,法 ①ドライバ固有の特徴・個性 ⇒ 個人差に影響 周辺環境 ドライバ属性 知覚・認知 判断 操作 多 様 な 運 転 行 動 の 表 現 1) 心理的側面(性格・運転態度・安全意識など) ⇒【法遵守傾向(A) 】という属性で表現 2) 生理的側面(視聴覚・運動感覚・筋力など) ⇒【情報処理能力(C)】という属性で表現 3) 行動的側面(操舵・加減速の特徴など) ⇒【運転スキル(B)】という属性で表現 ②ドライバ状態 ⇒ 個人内差に影響 4) ドライバ状態(焦り、居眠りなど) ⇒【覚醒水準(D) 】という属性を設定 図6 ドライバ属性 ここで,検知幅は,検知対象が車線中央から左 右それぞれある幅以内に入っている場合に作動条 件の 1 つを満たすものとする. また,作動 TTC に関しては,対先行車と対静 止車で別々の値を指定できるように,マップを構 - 3 - JARI Research Journal (2016.12) 成した(表 2).ここでは,設定を 4 段階としたが, 可変とすることができる. 表 2 作動 TTC のマップ入力 マップ ID 1 2 設定項目 1 2 3 4 作動最低相対速度[km/h] 0 15 20 60 作動 TTC 対先行車[s] 0 2 2 3 作動最低相対速度[km/h] 0 15 20 40 作動 TTC 対先行車[s] 0 1.5 1.5 2 図7 システム設定 4. 2 ドライバ属性・エラーの設定 3.3 で提示したドライバ属性の法遵守向(3 段 検知必要時間は、センサでの先行車両検知の延 べ時間がある値以上となった場合に,作動条件の 1 つを満たすものとした. 階),運転スキル(3 段階),情報処理能力(3 段 階) ,覚醒水準(5 段階)によって設定可能な 135 パターンのうち,平成 27 年度はドライバ属性の 動作を確認するため,法順守傾向・運転スキル・ 情報処理能力については,平均的なドライバ,高 4. 開発したシミュレーション技術の評価 平成 27 年度は映像記録型ドライブレコーダが 記録した追突事故・ニアミス時の先行車の速度の 推移,初期車間距離,後続車の初期速度に基づい い優良ドライバ, 低い劣悪ドライバを設定した(表 3) .また,覚醒水準については,平均的なドライ バにおいて標準,低い,高い状態を設定した. て危険場面を定義づけ,その場面における運転支 表 3 確認に用いたドライバ属性のパターン 援システム(衝突警報・被害軽減ブレーキ)の効 果を評価した. 本稿で活用したドライブレコーダは,衝突時や 急減速時に発生する急激な加速度変化を検知した 瞬間をトリガに,その前 10 秒,後 5 秒の計 15 秒 間の前方映像とデータ(速度・加速度・ブレーキ信 号など)を記録するものである.200 台のタクシー に搭載したドライブレコーダデータから追突事 ドライバエラーは, (1)エラーなし, (2)認知 故・ニアミスデータを目視によって抽出した.追 ミス(脇見を模擬)が発生, (3)操作ミス(ブレ 従中に先行車が減速を開始した後に自車が減速し ーキの操作の誤りを模擬)が発生, (4)認知ミス たパターンの事故 12 件と,ニアミス 45 件を検討 と操作ミスの双方が発生の 4 パターンとした. 対象として選定した. 4. 3 追従・追突シミュレーションの試行結果 図 8 にシミュレーションを実施した結果を示す. 4. 1 運転支援システムの設定 前方の障害物を検知するために搭載されるセン システムなしの事故(n=349),衝突警報ありの事 サの特性は,検知距離と検知角度のパラメータに 故 ( n=324 ), 被 害 軽 減 ブ レ ー キ あ り の 事 故 よって設定した.システムとしては,衝突警報(音 (n=270)の衝突時相対速度を 10 [km/h]区分の を用いた警報),ブレーキアシスト,被害軽減ブレ 事故件数の分布と累積頻度を比較した結果である. ーキを想定した.システムの作動内容は,作動 衝突警報から被害軽減ブレーキと運転支援シス TTC,作動相対速度,作動対象ラップ率,減速度 テムが高機能になることにより,衝突時相対速度 勾配,最大減速度によって設定した.設定値につ の累積頻度が,低速側にシフトしており,定量的 7). な事故低減効果を算出できる目途があることを確 いては,本間ら論文 6) を参考にした(図 認した. - 4 - JARI Research Journal (2016.12) (2009) 6) 本間ら,“前方車両衝突防止支援システムの効果予測- 危険の予期が低いドライバの衝突予知警報に対する反 応特性-”,自動車技術会論文集,Vol. 43, No. 3, (2012), pp.769-775. 図8 追従・追突シミュレーションの被害低減効果 5. まとめ 平成27年度は,全体開発計画を策定し,事故シ ナリオとして,単路での追従・追突シーンにおい て,被害軽減ブレーキなどの運転支援システムに よる定量的な事故低減効果を算出できる目途があ ることを確認した. 6. 今後の課題 シミュレーション結果の妥当性を検証すると共 に,実用化(自動車メーカ活用)に向け,各社の 目的を整理し,必要な機能を織り込み,また,各 社のモデルを容易に組み込むことができるように インターフェースの標準化を推進していく. 参考文献 1) 内閣府,“戦略的イノベーション創造プログラム(SIP) 自動走行システム 研究開発計画”,(2015) 2) 経済産業省,平成27年度「戦略的イノベーション創造プ ログラム(自動走行システム):交通事故低減詳細効果見 積もりのためのシミュレーション技術の開発及び実証」報 告書 3) 内閣府, 平成 26 年度「交通事故死傷者低減の国家目標 達成に向けた調査・検討における詳細効果見積もりのた めのシミュレーション技術に係る調査検討」報告書 4) Saifuzzaman,M. ,et al.“Incorporating human-factors in car-following models: A review of recent developments and research needs”, Transportation Research Part C Emerging Technologies, Vol. 48, (2014), pp. 379-40 5) 石橋 基範:自動車運転者の個人特性評価に基づく反 応理解手法に関する研究,香川大学博士論文, p88-109 - 5 - JARI Research Journal (2016.12)
© Copyright 2026 Paperzz