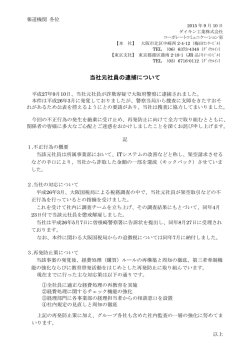
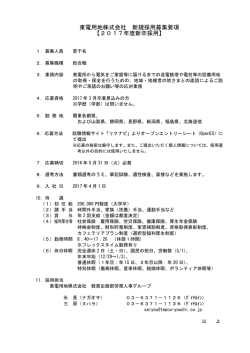
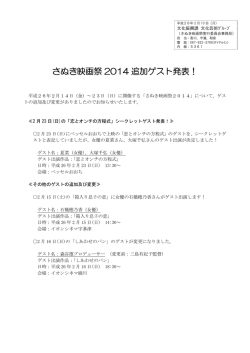
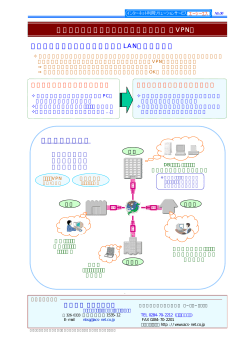
HIRI 技術情報 研究内容紹介 機械装置のリアルタイム制御シミュレータの開発 機械装置のリアルタイム制御シミュレーション技術に関する研究(H20〜21年度) 情報システム部 浦池 隆文 1.はじめに 自 動 車 や 航 空・ 宇 宙 等 の 先 進 的 な 分 野 で は、 HILS(Hardware In the Loop Simulation)と呼 ばれる開発手法が導入され、開発効率の向上が図ら れています。近年は一次産業向け機械装置等の分野 でもメカトロニクス化が進んでおり、同手法による 開発コストの低減や付加価値の向上が期待されま す。しかし、市販のHILS向けツール類は非常に高 価でかつ、使用法が複雑であり、広く普及している ものではありません。そこで、低コストで簡便に活 用出来るHILSを目指し、フリーソフトを利用した リアルタイムシミュレーションに関する研究を行っ ています。 2.HILSについて 機械装置開発の一般的な流れとHILSについて図1 に示します。機構系と制御系は、仕様の検討と、こ れに基づいた設計(仮想試作)が行われた後、実機 が作製されます。しかし実機によるテストで不具合 が生じた場合、設計変更や再試作には多くの労力と コストが発生する事となります。そこで、設計段階 での機構系もしくは制御系の一方をシミュレーショ ンモデルとし、他方に実機を用いて相互に接続した HILSによる検証を行う事で、実機システムによる試 験を行う以前に様々な機構や制御アルゴリズムの確 認、および不具合の早期発見が可能となります。 図1 機械装置開発とHILS 図2 リアルタイムシミュレータの構成 のモデル化と数値演算を行うソフトウェア ③①のハードウェア上で②の演算を実時間で実行す るためのリアルタイムOS これらを満足するシミュレータを図2の様に構 成しました。汎用PCとPCI接続の拡張I/Oボードを ベースとし、フリーソフトとして提供されるリア ルタイムOS(RTAI)や数値演算ソフト(Scilab/ Scicos)を組み合わせています。 4.倒立振子設計への適用 3D-CADに よ る 機 構設計とScicosによ る 制 御 設 計 を 行 い、 両者をシミュレータ 上に実装して制御パ ラメータの設定を行 い ま し た。 そ の 後、 図3 倒立振子試験機 実際に試験機を作製 し、制御試験を行い ました。摩擦やノイズ等の影響により、シミュレー ションと実機制御の結果には差があったものの、若 干のパラメータ調整を行う事で実機の制御を行う事 が可能であり、シミュレータとして有効に機能する 事を確認しました。 5.今後の課題 3.リアルタイムシミュレータの構築 HILSによる設計・検証では、実機と接続可能な シミュレータをいかに構築するかが重要です。求め られる要素としては、以下の3点が挙げられます。 ①実機に相当するセンサ信号や制御信号等の入出力 機能を持つハードウェア ②シミュレーション対象の機構や制御アルゴリズム 6 工業試験場技術情報 Vol . No . 今回構築したシミュレータでは、平面内での並進 と回転で表される2次元的な機構を扱いました。今 後は、より複雑な機構の解析が可能なシステムとし て機能を充実させて行く予定です。 TEL:011−747−2943(ダイヤルイン) E-mail:[email protected]
© Copyright 2026 Paperzz