第2章
2.1
基礎方程式と弾性問題の解
フックの法則
●応力に対してひずみが生じ、応力をゼロに戻すとひずみも消失する性質を「弾性」という。弾性
挙動を示す棒の軸方向の応力σとひずみεの間には式(a)の関係が成り立つ。これが「フックの
法則」であり、Eをヤング率または弾性率と呼ぶ。棒を軸(縦)方向に引張ると直交(横)方向に収
縮し、逆に縦方向に圧縮すると横方向に膨張する。棒の縦横の長さを L,d とし、縦ひずみを
εL=(L-L0)/L0、横ひずみを εd=(d-d0)/d0 で表すと(L0,d0 は初期長さ)、材料の変形
特性を表すもう1つの弾性定数としてポアソン比νが式(b)で定義される。一方、せん断応力τ
とせん断ひずみ 2γ(γ:テンソルひずみ)の間にも式(a)と同形式の式(c)が成立ち、Gをせ
ん断弾性率または剛性率と呼ぶ。等方弾性体では E,ν,G の間に式(d)の関係がある。
(a ) σ = Eε
(b ) ν = −
εd
εl
(c ) τ = 2Gγ
(d ) G =
E
2(1 + ν )
●等方・均質弾性体の主応力(σ1,σ2,σ3)と主ひずみ(ε1,ε2,ε3)の間には
εi =
{
}
1
σ − ν (σ j + σ k )
E i
(i, j, k = 1,2,3)
(2.1)
なる応力~ひずみ関係が成り立つ。これを「一般化したフックの法則」という。棒の単軸引張で
、σ2=σ3=0 より ε1=σ0/E,ε2=ε3=-νσ0/E となり、式(a)(b)
は σ1=σ0(軸応力)
に帰着する。式(2.1)を応力成分について解くと次の表示を得る。
σi =
νE
(1 + ν )(1 − 2ν )
e+
E
ε = λe + 2με i
1 +ν i
(i = 1,2,3)
(2.2)
e=ε1+ε2+ε3 は体積ひずみである。λ,μ(=G)は「ラ-メの常数」と呼ばれる。
●式(2.1)で 1→x,2→y,3→z とすると、xyz直角座標における垂直応力(σx,σy,σz)と垂
直ひずみ(εx,εy,εz)の関係が得られる。つまり式(2.1)は任意方向の垂直応力・ひずみの間
で成り立っている。 例えば、x軸の(1,2,3)方向への方向余弦を(l1,m1,n1)とすると、応力の座
標変換式:式(1.10)より
σx=l12σ1+m12σ2+n12σ3
=l12 (λe+2με1)+m12 (λe+2με2)+n12 (λe+2με3)
=λe(l12+m12+n12)+2μ(l12ε1+m12ε2+n12ε3)
=λe+2μεx
となって式(2.2)が成立する。 ただし、第3式の第1項の(
(
)=1(方向余弦の性質)、第2項の
)=ε x(応力と同形のひずみの座標変換式より)を用いている。 一方、y軸の方向余弦を
(l2,m2,n2)とすると、同様の演算から
-Elastic 2.1-
τxy=l1l2σ1+m1m2σ2+n1n2σ3
=l1l2 (λe+2με1)+m1m2 (λe+2με2)+n1n2 (λe+2με3)
=λe(l1l2+m1m2+n1n2)+2μ(l1l2ε1+m1m2ε2+n1n2ε3)
=2μγxy
=2Gγxy
を得る。すなわち、垂直応力~ひずみ関係:式(2.2) から座標変換式を介してせん断応力~ひず
み関係が導かれたことになる。
●以上まとめると、xyz直角座標の応力・ひずみ成分間の関係は(μ=G)
σx=λe+2μεx
τyz=2μγyz
σy=λe+2μεy
τzx=2μγzx
σz=λe+2μεz
τxy=2μγxy
(2.3)
※柱状弾性体の側面を拘束し、側方にひずみを生じさせない状態
で一様な軸応力を加えるときの軸方向応力とひずみの関係を
σ1
求める。軸方向応力・ひずみをσ1,ε1 とすると、側方拘束状
態:ε2=ε3=0 では式(2.1)より
ε2=0 → σ2=ν(σ3+σ1
ε3=0 → σ3=ν(σ1+σ2)
両式より主応力 σ1,σ2,σ3 の関係として次式を得る。
σ2 =σ3 =
ν
1 −ν
σ 1 ( = K 0σ 1 )
(2.4)
K0 は土質力学では静止土圧係数に相当する。上式のσ2,σ3 をε1 の式に代入すると
2
1⎛
ν
⎞ 1 − ν − 2ν σ 1 σ 1
=
σ1 ⎟ =
ε 1 = ⎜σ 1 − ν × 2
E⎝
1 −ν ⎠
1 −ν
E Ec
となり、
「側方拘束弾性率」Ec が定義される。
※式(2.1)の3つの式を辺々加え、平均垂直応力を σm=(σ1+σ2+σ3)/3 と置くと
体積ひずみ:e = ε 1 + ε 2 + ε 3 =
σ
3(1 − 2ν )
1 − 2ν
(σ 1 + σ 2 + σ 3 ) =
σm = m
E
E
K
によって、σm~e関係を結ぶ「体積弾性率」Kが定義される。
※垂直応力σx,σy,σz から平均垂直応力σm を引き、τyz などをそのままにした応力を偏差応力と
いう。同様に、γyz などを変えずに垂直ひずみεx,εy,εz から e/3 を引いたものを偏差ひずみ
という。偏差応力・ひずみに記号’を付けると
-Elastic 2.2-
σ x ' = λe + 2Gε x − Ke =
νE
(1 + ν )(1 − 2ν )
⋅e +
E
E
⋅εx −
⋅e
(1 + ν )
3(1 − 2ν )
E
1 +ν ⎫
E
e
⎧
⎫
⎧
⋅ e⎬ =
⎨(1 − 2ν )ε x − (1 − 2ν )⎬
⎨νe + (1 − 2ν )ε x −
(1 + ν )(1 − 2ν ) ⎩
3
3
⎭
⎭ (1 + ν )(1 − 2ν ) ⎩
E ⎧
e⎫
'
=
⎨ε x − ⎬ = 2Gε x
(1 + ν ) ⎩
3⎭
=
となる。せん断応力~ひずみ関係は τyz=2Gγyz 等で表せるから、偏差応力・ひずみを用いる
と全ての応力~ひずみ成分の関係が 2G で結ばれることが分かる。
2.2
弾性論における基礎方程式
●変位の基礎方程式:等方弾性体の応力~ひずみ関係:式(2.3) に、第1章で定義したひずみ~変
位関係:式(1.21)を用いると、応力と変位の関係式が次のように表せる。
ν
⎛ ∂u
⎞
+
e ⎟ など
⎝ ∂x 1 − 2ν ⎠
⎛ ∂w
σ x = 2G⎜
∂v ⎞
τ yz = G⎜⎜
+ ⎟⎟ など
⎝ ∂y ∂z ⎠
(2.5)
このように表したσx,τxy 及びτxz を、それぞれx,y及びzで微分すると
⎛ ∂ 2u
∂σ x
ν
∂e ⎞
= 2G⎜⎜ 2 +
⋅ ⎟⎟
1 − 2ν ∂x ⎠
∂x
⎝ ∂x
∂τ xy
∂τ xz ⎛ ∂ 2 u ∂ 2 w ⎞
⎟
= ⎜⎜ 2 +
∂z
∂x∂z ⎟⎠
⎝ ∂z
⎛ ∂ 2u ∂ 2v ⎞
⎟
= G⎜⎜ 2 +
∂y
∂x∂y ⎟⎠
⎝ ∂y
上3式を辺々加算して整理すると、x方向の力のつりあい式として
G∇ 2 u + G
∂ ⎛ ∂u ∂v ∂w ⎞
∂e
ν
⎜⎜
⎟⎟ + 2G
+
+
⋅ + X =0
∂x ⎝ ∂x ∂y ∂z ⎠
1 − 2ν ∂x
G∇ 2 u + G
∂e ⎧
2ν ⎫
⎨ 1+
⎬+ X =0
∂x ⎩ 1 − 2ν ⎭
(2.6)
を得る。x→y,zとして、y,z方向の力のつりあい式も同様に表せる。これを「変位の基礎方
程式」という。ただし、e及び∇2 は次式で定義される。
∂u ∂v ∂w
+
+
体積ひずみ: e =
∂x ∂y ∂z
∂2
∂2
∂2
ナブラ自乗:∇ = 2 + 2 + 2
∂x
∂y
∂z
2
物体力が場所によらず一定(例えば、X=Y=0、Z=-ρg)の場合、式(2.6)を微分して
1 ∂ 2e
⎛ ∂u ⎞
=0
x : ∇2 ⎜ ⎟ +
2
⎝ ∂x ⎠ 1 − 2ν ∂x
(xで微分 )
同様にy,z方向についても、つりあい式をy,zで順次微分して
⎛ ∂v ⎞
∂ 2e
1
y : ∇ ⎜⎜ ⎟⎟ +
⋅ 2 =0
⎝ ∂y ⎠ 1 − 2ν ∂y
2
1
∂ 2e
⎛ ∂w ⎞
⋅ 2 =0
z :∇ ⎜ ⎟+
⎝ ∂z ⎠ 1 − 2ν ∂z
-Elastic 2.3-
2
以上の3式を加算すると、最終的に次式を得る。
∇ 2e +
1
∇2e = 0
1 − 2ν
→
∇2e = 0
(2.7)
また、式(2.6)に∇2 を作用させると、例えばx方向は
∇ 2∇ 2u +
1
⎛ ∂e ⎞
∇2 ⎜ ⎟ = 0
1 − 2ν
⎝ ∂x ⎠
→
∇ 4u = 0
y,z方向についても同様であり、結局次式を得る。
∇4u=0
∇4v=0
∇4w=0
(2.8)
すなわち、eは調和関数、u,v,wは重調和関数でなければならない。
●弾性問題における未知数と関係式を整理すると以下のようになる。
未知数(15 個)
:
変位
関係式(15 式)
:
(u,v,w)
①ひずみ~変位(6式)
ひずみ(εx,εy,εz,γyz,γzx,γxy)
応力
(σx,σy,σz,τyz,τzx,τxy)
誘導:①+② → 式(2.5)
②応力~ひずみ(6式)
③応力のつり合い式(3式)
(ひずみの6成分消去)
式(2.5)+③ → 基礎方程式:式(2.6) or 式(2.8) (応力の6成分消去)
→ 基礎方程式(3式)+ 境界条件
→
解(u,v,w)
※二次元の調和関数と重調和関数の例
*調和関数(直角座標xy):
x,y,x2-y2,xy,x3-3xy2,3x2y-y3,x4-6x2y2+y4,x3y-xy3
sin(mx)・cosh(mx),enxcos(nx)
*調和関数(極座標rθ)
:
θ,logr,rnsin(nθ),rncos(nθ),r-nsin(nθ),r-ncos(nθ)
*重調和関数(Vを調和関数として)
・直角座標:xV,yV,(x2+y2)V
・極座標:Vrcosθ,Vrsinθ,r2V
●応力の基礎方程式:変位が発生して応力が生じるから、物体内に生じる応力は、応力のつり合い
方程式と同時に、適合条件式を満たす必要がある。誘導は省略して(後述の2次元問題で誘導を
示す)結論のみ示すと、適合条件式を応力成分で表示し、つり合い条件式と組み合わせることに
より、x方向の基礎方程式が以下のように得られる。
(Ω=3σm=σx+σy+σz と置く)
-Elastic 2.4-
⎡ 2
⎡ ∂X ∂Y ∂Z ⎤
∂ 2Ω ⎤
Ω⎤
ν
−
−
= (1 + ν )⎢
−
∇
Ω
−
⎢
⎥
2 ⎥
2 ⎥
∂x ⎦
∂x ⎦
⎣ ∂x ∂y ∂z ⎦
⎣
⎡
(1 + ν )⎢∇ 2 Ω − ∇ 2σ x − ∂
⎣
2
物体力X,Y,Zが場所によらず一定(右辺がゼロ)なら、上式は
(1 + ν )∇ 2σ x − ∇ 2 Ω + ∂
Ω
=0
∂x 2
2
(2.9)
同様な式がσy,σz に関しても書けるから、3式を加えると、結局
∇2Ω=∇2(σx+σy+σz)=0
(2.10)
を得る。すなわち、平均垂直応力σm=Ω/3 は調和関数である。このとき式(2.9)の上の式に∇2
を作用させると ∇4σx=0 を得る。同様な式が他に5つ書けるから、まとめると
∇4(σx,σy,σz,τyz,τzx,τxy) = 0
(2.11)
したがって、直角座標における応力成分は重調和関数でなければならない。
●軸対称問題における変位の基礎方程式:軸対称問題ではz軸を対称軸とする円筒座標(r,θ,z)
が用いられ、座標軸に対応する変位(ur,uθ,w)には
uθ=0,ur=ur (r,z),w=w(r,z)
なる条件が課せられる。したがって、θに関するせん断ひずみ:γθz=γrθ=0 であり、式(1.47)
で求めた4つのひずみ成分(εr,εθ,εz,γrz)が残る。対応して、応力成分に関しては τθz=
τrθ=0 であり、(σr,σθ,σz,τrz)の4成分が残る。軸対称問題における応力~ひずみ関係は、
xyz座標の応力~ひずみ関係と形式的に同じであり、x→r,y→θ,z→z として
εi =
1
{σ i −ν (σ j + σ k )}
E
(i, j, k = r ,θ , z )
2γ rz =
τ rz
G
(2.12)
の4式となる。逆に解くと、垂直成分については式(2.2)と同形の関係式を得る。 ここで、軸対
称問題での体積ひずみは e = ε r + ε θ + ε z =
∂u r u r ∂w
である。
+
+
∂r
r
∂z
前節と同様に、ひずみ~変位関係を応力~ひずみ関係に代入して応力成分を変位で表し、これ
らを応力のつり合い方程式に代入すると、変位の基礎方程式を得る。ただし、軸対称問題ではΘ
=0,τθz=τrθ=0,σθはθに無関係であるから ∂σθ/∂θ=0 となり、θ方向のつり合いは
自動的に満たされている。r,z方向は次のようになる。
1 ∂e u r ⎤
⎡
+R=0
−
r : G ⎢∇ 2 u r +
1 − 2ν ∂r r 2 ⎥⎦
⎣
1 ∂e ⎤
⎡
z : G ⎢∇ 2 w +
+Z =0
1 − 2ν ∂z ⎥⎦
⎣
(2.13)
円筒座標の∇2 は下式であるが、軸対称問題ではur, wにθを含まないので、第3項は消滅する。
∂2
∂
∂2
∂2
∇ = 2 +
+
+
r∂r r 2 ∂θ 2 ∂z 2
∂r
2
-Elastic 2.5-
2.3
2次元問題における基礎方程式
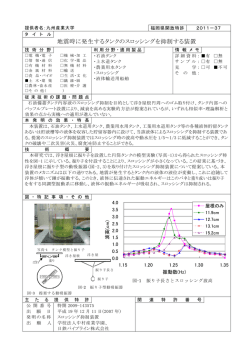
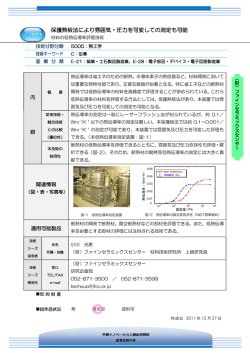
●平面応力:薄い板の面内変形問題のように、面と
垂直な方向(z)に外力(境界応力、物体力)が作
P1
用しない場合は、z方向に関する応力成分をゼロ
と仮定してよい。
q
σz=τyz=τzx=0
y
(2.14)
P2
x
この仮定によって問題はxy面内での2次元応
力・変形問題に帰着する。上式を前節の応力~ひ
ずみ関係に代入すると、γyz=γzx=0 が得られ、
R1
ゆがみのない板のxy面内での変形を対象とし
R2
ていることが分かる。残りの応力~ひずみ関係は
εx=(σx-νσy)/E
2γxy=τxy/G
εy=(σy-νσx)/E
図-2.2
平面応力
(2.15)
と板厚方向のひずみεz に関する εz=-ν(σx+σy)/E である。これらを逆に、応力をひずみ
で表して整理すると
σx =
(
E
ε x + νε y
1 −ν 2
)
σy =
(
E
ε y + νε x
1 −ν 2
)
τ xy = 2Gγ xy
(2.16)
のようになる。式(2.15)や式(2.16)が平面応力状態での直角座標応力成分(σx,σy,τxy)とひず
み成分(εx,εy,γxy)の関係を与え、行列表示では次のように表される。
⎧σ ⎫
⎪⎪ x ⎪⎪
E
⎨σ y ⎬ =
2
⎪ ⎪ 1 −ν
⎪⎩τ xy ⎪⎭
⎤ ⎧ε x ⎫
⎥ ⎪⎪ε ⎪⎪
1
0
⎥⎨ y ⎬
0 (1 − ν ) / 2⎥⎦ ⎪⎪2γ xy ⎪⎪
⎭
⎩
ν
⎡1
⎢ν
⎢
⎢⎣0
0
(2.17)
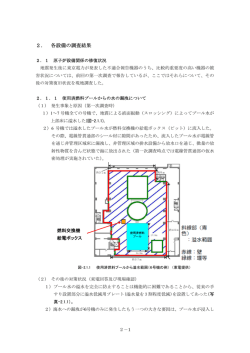
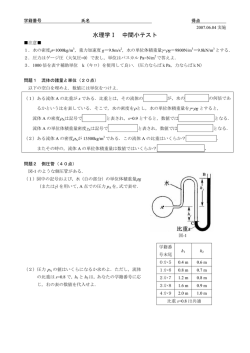
●平面ひずみ:延長の長い構造物の断面内での応力・変形問題のように、長手方向(z)に拘束さ
れ、zに無関係な外力が作用する場合は、z方向に関するひずみ成分をゼロと仮定してよい。す
なわち、z方向に拘束されていることより w=0、またu,vはx,yのみの関数になるから、
次が仮定できる。
εz=γyz=γzx=0
(2.18)
応力~ひずみ関係より τyz=τzx=0 で、残りの
q
応力(σx,σy,τxy)とひずみ(εx,εy,γxy)成分
y
の関係は次式で与えられる。
1 −ν 2 ⎛
ν
⎞
εx =
σy⎟
⎜σ x −
E ⎝
1 −ν
⎠
2
1 −ν ⎛
ν
⎞
εy =
σx⎟
⎜σ y −
E ⎝
1 −ν
⎠
2γ xy =
τ xy
x
G
(2.19)
-Elastic 2.6-
図-2.3
平面ひずみ
長手方向の変形を拘束する応力σz は、εz=0 より次式で表される。
σ z = ν (σ x + σ y ) =
(
E
ε +ε
(1 + ν )(1 − 2ν ) x y
)
τyz=τzx=0 であるから、σz は3次元応力状態の1つの主応力である。式(2.19)の応力~ひず
み関係は、行列表示では以下のように表される。
0
⎤ ⎧ε x ⎫
⎥ ⎪⎪ε ⎪⎪
1 −ν
0
⎥⎨ y ⎬
0 (1 − 2ν ) / 2⎥⎦ ⎪⎪2γ xy ⎪⎪
⎭
⎩
⎧σ ⎫
⎡1 − ν
x
E
⎪⎪ ⎪⎪
⎢ ν
⎨σ y ⎬ =
⎢
⎪ ⎪ (1 + ν )(1 − 2ν ) ⎢ 0
τ
⎣
⎪⎩ xy ⎪⎭
ν
(2.20)
●式(2.15)と式(2.19)を比べると、平面応力の諸式で E,ν を
E → E' =
E
1 −ν 2
ν →ν' =
ν
(2.21)
1 −ν
と置き換えれば平面ひずみ問題に帰着する。すなわち、平面応力問題として解いた解の(E,ν)
を(E',ν')と書き換えれば平面ひずみ問題の解が得られる。
●平面問題における基本的な諸式は、応力~ひずみ関係式(平面応力・ひずみ)と
①ひずみ~変位関係: ε x =
②ひずみの適合条件:
∂ 2ε x
③応力のつり合い式:
∂σ x
∂y 2
∂x
∂u
∂x
+
+
∂v
∂y
εy =
∂ 2ε y
∂x 2
∂τ xy
∂y
=2
2γ xy =
∂u ∂v
+
∂y ∂x
∂ 2γ xy
(2.22)
∂x∂y
+ X =0
∂τ xy
∂x
+
∂σ y
∂y
+Y =0
であり、これらを組み合わせて変位あるいは応力の基礎方程式が導かれる。
●応力の基礎方程式:上式②の適合条件式のひずみ成分を、式(2.15)を用いて応力成分で書き直し、
応力のつり合い式③を用いてτxy をσx,σy で表して整理すると
2
∂2
∂2
E ∂ τ xy
(
)
(
)
−
+
−
=
σ
νσ
σ
νσ
x
y
y
x
G ∂x∂y
∂y 2
∂x 2
∂τ xy
∂τ yx
= (1 + ν )
+ (1 + ν )
∂x∂y
∂y∂x
⎡ ∂Y ∂ 2σ y ⎤
⎡ ∂X ∂ 2σ x ⎤
= −(1 + ν ) ⎢
+
−
+
+
ν
(
1
)
⎢
⎥
2 ⎥
∂
∂
y
x
∂
∂y 2 ⎥⎦
x
⎢
⎣
⎦
⎣
→
(
)
⎛ ∂X ∂Y ⎞
2
⎟⎟
∇ 1 σ x + σ y = −(1 + ν )⎜⎜
+
⎝ ∂x ∂y ⎠
ただし、∇ 1 =
-Elastic 2.7-
2
∂2
∂2
+
∂x 2 ∂y 2
(2.23)
を得る。X=0,Y=-ρg(重力) なら
∇12(σx+σy) = 0
(2.24)
となり、垂直応力の和は調和関数である。上式は三次元の式(2.10)で σz=0(平面応力) また
は σz=ν(σx+σy)(平面ひずみ)としても得られる。 このときの応力の基礎方程式は式(2.11)
n(l,m)
と同様に次式で与えられる。
∇14(σx,σy,τxy)= 0
f
fy
(2.25)
上式の微分方程式を解くに当たり、境界条件の設定が必
α
α
要になる。右図のように、法線の方向余弦が(l,m)の
fx
σx
境界面素に単位面積当り(fx,fy)の表面外力が作用す
y
る場合、境界条件式は次式で表される。
τxy
σy
x
l・σx+m・τxy = fx
l・τxy+m・σy = fy
(2.26)
図-2.4
応力の境界条件
●変位の基礎方程式:式(2.15)の応力~ひずみ関係と、式(2.22)の①ひずみ~変位関係を用いて、
③の応力のつり合い式を変位u,vで表すと、変位の基礎方程式として次式を得る。
E ∂e1
2
+ G∇1 u + X = 0
2(1 − ν ) ∂x
E ∂e1
2
y:
+ G∇1 v + Y = 0
2(1 − ν ) ∂y
ただし、e1 =
x:
∂u ∂v
+
∂x ∂y
(2.27)
上式をx,yで順次微分して加えると、X=0,Y=-ρg の場合、式(2.7)及び式(2.8)と同様
な関係として
∇12e1 = 0
∇14u = 0 ∇14v = 0
→
(2.28)
を得る。これを境界条件に合うように解けばよいが、境界で応力(fx,fy)が与えられる場合
は、式(2.26)の応力成分を変位で表したものを用いる。すなわち、式(2.16)と式(2.22)の①から
σx =
E
1 −ν 2
⎛ ∂u
∂v ⎞
⋅ ⎜⎜ + ν ⎟⎟ などとして式(2.26)に代入し、変位の境界条件に直して適用する。
∂y ⎠
⎝ ∂x
●極座標における関係式:極座標においては次の関係式が成り立つ。
①ひずみ~変位関係: ε r =
②ひずみの適合条件:
③応力のつり合い式:
∂ 2ε r
∂θ
2
∂u r
∂r
+
εθ =
∂uθ
r∂θ
r∂ (ε r − 2ε θ )
∂r
+
−r
2
ur
2γ rθ =
r
∂ 2ε θ
∂r
2
=2
∂σ r ∂τ rθ σ r − σ θ
+
+
+R=0
∂r
r∂θ
r
-Elastic 2.8-
∂
∂θ
∂u r
r∂θ
+
∂uθ
∂r
∂γ
⎛
⎜⎜ γ rθ + r rθ
∂r
⎝
−
uθ
r
⎞
⎟⎟
⎠
∂σ θ ∂τ rθ 2τ rθ
+
+
+Θ=0
∂r
r∂θ
r
④応力~ひずみ関係: ε r =
σ r − νσ θ
εθ =
E
σ θ − νσ r
2γ rθ =
E
τ rθ
G
式(2.23)~式(2.25)のような関係は前と同様の手順で導くことができるが、垂直応力の和は座標
変換によらない、すなわちσx+σy=σr+σθ の性質を使うと、式(2.24)の応力の基礎方程式に
対応する式が次式で与えられる。
∇ 1 (σ r + σ θ ) = 0
ただし、∇ 1 =
2
2
∂2
∂
∂2
+
+
∂r 2 r∂r r 2 ∂θ 2
(2.29)
極座標における変位の基礎方程式を導く場合は、変位(ur,uθ)を未知数とする代わりに、二
次元の体積ひずみ e1=εr+εθ とz軸回りの回転 2ωを未知数とした方が便利である。すなわ
ち、両者は次式で定義される。
e1 =
∂u r
∂r
※xy座標では
+
ur
+
r
∂uθ
2ω =
r∂θ
e1 = ε x + ε y =
∂uθ
∂r
+
∂u ∂v
+
∂x ∂y
uθ
r
+
∂u r
(2.30)
r∂θ
∂v ∂u
−
∂x ∂y
2ω =
※xy座標の剛体変位(ur=a+by,vr=c-bx)を上式に代入すると、e1=0,
ω=-b(b:回転に対応する剛体変位)になる。
これによって変位の基礎方程式は
Er
∂ (rR ) ∂Θ
2
∇ 1 e1 +
+
=0
2
∂r
∂θ
1 −ν
Er
∂ (rΘ ) ∂R
2
∇1 ω +
−
=0
2
∂r
∂θ
1 −ν
(2.31)
と書けるが、重力場*では R=-ρgsinθ,Θ=-ρgcosθ であるので、上式は簡略化されて
次式のように表示される。
∇12e1 = 0
∇12ω = 0
(2.32)
*
重力場
R
θ
y
ρg
θ
x
-Elastic 2.9-
Θ
2.4
弾性問題(平面応力)の厳密解
●物体内に生じる応力は、物体内の各点で応力のつり合い式と適合条件を満足し、表面では境界条
件を満足していなければならない。このような応力が求まれば、これから得られる変位は変位の
方程式を満足する。また変位の方程式を満足する変位が求まれば、これから得られる応力は応力
のつり合い式と適合条件を満足する。応力のつり合い式、適合条件及び変位の方程式を弾性基礎
方程式という。また、弾性体内部で応力のつり合い式と適合条件あるいは変位の方程式を満足し、
表面では境界条件を満足する解を弾性問題の厳密解という。このような解は存在し、与えられた
境界条件に対しては一つしか存在しないこと(解の唯一性)が証明されている。
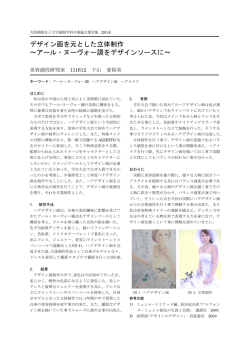
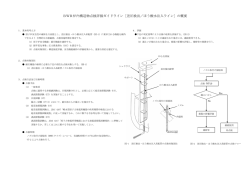
●サンブナン(Saint-Venant)の原理: 弾性体の一部分に作用している荷重を、これと同等な荷
重、すなわち静力学的に等しい合力と合モ-メントに置き換えれば、両形式の荷重によって弾性
体に生じる応力状態は、荷重点近傍では異なるけれども、荷重点から十分に遠く離れた領域では
一致する。これをサンブナンの原理という。
例えば、図-2.5(a)のように端面に等分布荷重pを受ける場合と、断面の図心を通る軸線に沿っ
て集中荷重P=pAを受ける場合では、両端近傍の応力状態は全く異なるけれども、端面から3倍
以上離れた領域では両応力状態はほとんど同じになる。図-2.5(b)のように、両端に一次的に分布
する外力を受ける場合と端面の角に逆向きの集中力P受ける場合に、両外力のモ-メントMが等
しければ、すなわち P=bhp0/6 ならば、両端近傍を除いて両応力状態は同じになる。
<一次分布の外力p0 とモーメントMの関係を作り、P=bhp0/6 を導け>
σ
p
σ
p0
幅b
σ
h
断面積A
M=bh2 p0 /6
M
σ
σ
P=pA
σ
P
σ
h
M
図-2.5
M=Ph
P
サンブナンの原理(a:単純引張
P
P
b:曲げ)
p0
幅b
h
p0
p0 /2
h
p0/2
p0 /2
M
=
P
+
P
p0 /2
M
p0/2
図-2.6
-Elastic 2.10-
端面外力分布
p0 /2
図-2.6 のように、端面に一次的に分布する外力を受ける場合には、これを静力学的に同等な荷重
(下式の垂直力Pとモ-メントM)に置き換えれば、端面近傍を除いて同じ応力状態になる。
P=
bh
p0
2
p bh 2
⎛ bh ⎞ 2 ⎛ h ⎞
M = 2⋅⎜
p0 ⎟ ⋅ ⎜ ⎟ = 0
12
⎝ 8
⎠ 3⎝2⎠
P
図-2.7 のような梁についても同様に、荷重点 D 及び
D
支点 A,B の近傍に対しては梁理論の結果が適用できな
B
A
いから、梁理論は高さに比べて長さが非常に長い梁の
P/2
P/2
変形及び荷重点、支点及び端の近傍を除く部分の応力
を解析する場合にのみ適用できる。
図-2.7
〔例題1〕pを定数として、以下の応力成分が弾
性基礎方程式の厳密解であるかどうかを
単純支持梁
y
p
調べ、厳密解ならば、どのような境界条
a
件の下での解であるかを図示せよ。
a
σx=p,σy=τxy=0
p
x
b
b
図-2.8
例題1:単軸引張
〔解〕上の応力成分を式(2.22)の応力のつり合い式、及び式(2.23)の応力の適合条件式に代入すれ
ば、X=Y=0 なら
∂p ∂ 0
+
=0
∂x ∂y
∂0 ∂0
+
=0
∂x ∂y
∇ 2 ( p + 0) = 0
であるから、両条件式を満足し、厳密解である。そして周辺においては
(σx)x=±b=p
(σy)y=±a=0
(τxy)x=±b=(τxy)y=±a=0
であるから、この解は図-2.8 のように、x方向に一様に引張られる長方形板に対する厳密解
である。
※ 図-2.9 のような場合は
(σx)x=±b=0 (|y|>c),=p(|y|<c)
(σy)y=±a=0
y
p
a
(τxy)x=±b=(τxy)y=±a=0
であるから、上の応力成分はこの場合に対す
る厳密解ではない。しかし、サンブナンの原
c
c
a
b
b
理によって両端近傍を除けば一様な応力状
態になり、σx=pc/a である。
図-2.9
-Elastic 2.11-
端面の部分的な引張
p
x
p
〔例題2〕pを定数として、以下の応力成分は、図-2.10 に示す
ような周辺に一様な圧力を受ける円板に対する厳密解に
なっていることを示せ。
a
σx=σy=-p,τxy=0
〔解〕上の 3 つの応力成分は明らかに応力のつり合い式と適合条
件を満足しており、これを極座標に変換すれば(以下の座
標変換を導け)
図-2.10
円板の問題
σr=σxcos2θ+σysin2θ+2τxysinθcosθ
=-p(cos2θ+sin2θ)=-p
σθ=σxsin2θ+σycos2θ-2τxysinθcosθ
=-p(sin2θ+cos2θ)=-p
p
τrθ=-(σx-σy) sinθcosθ+τxy (cos2θ-sin2θ)=0
となるから、境界条件 (σr)r=a=-p,(τrθ)r=a=0 を
満足している。よって、この応力成分は図-2.10 の場合に
対する厳密解である。
b
a
※ 図-2.11 の場合は境界条件が
(σr)r=a=-p,(σr)r=b=(τrθ)r=a=(τrθ)r=b=0
だから、上の応力成分はこの場合に対する厳密解ではない。
図-2.11
円管の問題
〔演習問題〕
(1)物体力がないとき、次の応力状態は弾性基礎方程式の厳密解であるかどうかを調べよ。厳密
解になり得るなら、どのような境界条件の下での解であるかを図示せよ。A は定数である。
a)σx=Ay2,σy=τxy=0
b)σx=Ax2,σy=-Ay2,τxy=2Axy
c)σx=Axy,σy=0,τxy=-Ay2/2
d)σx=A(x2y-2y3/3),σy=-Ay3/3,τxy=-Axy2
e)σx=Ay,σy=τxy=0
<解1>
c)つり合い式と適合条件式を満たし、厳密解である。
x:
∂
∂
( Axy) + (− Ay 2 / 2) = 0
∂x
∂y
y:
∂
∂
(− Ay 2 / 2) + (0) = 0
∂x
∂y
-Elastic 2.12-
∇ 2 ( Axy + 0) = 0
端部にモーメントM0 が右回りに作用する梁内の応力解である。端部のモーメントM0 は、上
下辺に働くせん断応力による左回りのモーメントM1 と、両端部に働くせん断応力による右
回りのモーメントM2 の差に対応する(M0=M1-M2)
。各量は
a
M 0 = 2 ∫ Ab y ⋅ y dy =
0
2 Ab a 3
3
M1 =
Aa
× 2b × a = Aba 3
2
y
M0
M2 = b×∫
a
−a
Ay 2
Aba 3
dy =
2
3
Aba
M0
a
x
b
Aa2/2
τ>0
e)つり合い式と適合条件式を満たし、厳密解である。
図のように、xによらない一様曲げを受ける梁内の応力を与える。
σ =σ x =
M
y,
I
σ y = τ xy = 0
a
M = 2∫ A y ⋅ y dy =
0
y
M
2
Aa 3
3
Aa
M
a
x
-Aa
(2)図-2.12 のような台形板の両端に単位面積当り
y
p1,p2 の等分布荷重が作用するとき
σx =
p1 + p 2 + ( p1 − p 2 ) / 2
, σ y = τ xy = 0
2
が厳密解になり得るか否かを調べよ。
p2
2a2
2a1
p1
x
b
b
図-2.12
<解2>
x方向のつり合い式:
p − p2
∂
∂
(σ x ) + (0) = 1
であり、他の条件式は満たす。したがっ
∂x
∂y
2b
て、厳密解であるためには p1=p2(単純引張)である必要がある。
-Elastic 2.13-
2.5
応力関数を用いた平面応力問題の解法
ある関数をχとして
σx =
∂2χ
∂y 2
σy =
∂2χ
∂x 2
τ xy = −
∂2χ
∂x∂y
(2.33)
と表せば、式(2.22)の③の応力のつり合い式
∂τ yx
∂σ x
+
= 0
∂x
∂y
∂τ xy
∂x
+
∂σ y
∂y
= 0
(2.22③)
は満足され、式(2.24)の応力の適合条件式は
∇2(σx+σy) = 0
→
∇2∇2χ = 0
(2.35)
となる。したがって、∇4χ=0 を満足する解を求めれば、応力は式(2.33)で得られ、それらは応力
のつり合い式と適合条件を満足して、厳密解になる。このように応力をある関数χの微分形で表す
とき、χを応力関数(stress function)という。(Airy の応力関数という)
〔例題1〕長方形板の一軸引張り
y2 は式(2.35)の解である。そこで A を未定
a
定数として χ=Ay2 と置けば
σx=2A
y
p
a
σy=τxy=0
σx
τyx
τxy
b
となるから、A=p/2 と置けば
σx=p
σy
p
σy=τxy=0
図-2.14
x
b
一軸引張り
になる。そして、x=±b で σx=p,τxy=0 となり、y=±a で σy=τxy=0 であるから、
これはx軸方向に一様に引張られた長方形板(図-2.14)に対する厳密解である。
変位を求めるには、応力~ひずみ関係と、ひずみ~変位関係を用いて
εx =
∂u
1
= (σ x − νσ y )
∂x
E
εy =
1
∂v
= (σ y − νσ x )
∂y
E
とし、E=2G(1+ν) を代入して、Eの代わりにGを用いれば
2G
1
∂u
(σ x + σ y )
= −σ y +
1 +ν
∂x
2G
1
∂v
= −σ x +
(σ x + σ y )
∂y
1 +ν
(2.36)
と表せる。応力の適合条件式によって(σx+σy)は調和関数であり、調和関数をx,yで微分した
ものも調和関数であるから、φを任意の調和関数として
-Elastic 2.14-
σx +σ y =
∂ 2φ
∂x∂y
(2.37)
と置けば、式(2.36)は次のようになる。
2G
∂2χ
∂ 2φ
∂u
1
= − 2 +
⋅
∂x
1 + ν ∂x∂y
∂x
2G
∂2χ
∂ 2φ
∂v
1
= − 2 +
⋅
∂y
1 + ν ∂x∂y
∂y
両辺をxあるいはyで積分すれば
2G u = −
∂χ
1 ∂φ
+
⋅
∂x 1 + ν ∂y
2G v = −
∂χ
1 ∂φ
+
⋅
∂y 1 + ν ∂x
(2.38)
ここで、∇2φ=0,∇4χ=0 である。そして式(2.37)に式(2.33)を代入すれば、φとχとの間に次
のような関係があることが分かる。
∇2χ =
∂ 2φ
∂x∂y
(2.39)
故に、χが決まれば式(2.39)によってφが決まり、式(2.38)によって変位が求められる。
〔例題2〕長方形板の一軸引張り(〔例題1〕で変位を求める)
χ=py2/2 であるから、式(2.39)より
p=
∂ 2φ
∂x∂y
φ = pxy + f ( x) + g ( y ) + C
→
ここで、f(x),g(y),C はそれぞれxのみ、yのみの関数及び定数である。これらを全てゼロと
考えてもxyは調和関数であるから、φ=pxy とすれば、
px
1
px → u =
1 +ν
E
νpy
ν
1
2Gv = − py +
py = −
py → v = −
1 +ν
1 +ν
E
2Gu = 0 +
となって既知の結果に一致する。f(x),g(y),C をゼロにしなければ、上記のφを使って
2G u =
1
{ px + g ' ( y )}
1 +ν
2G v = − py +
1
{ py + f ' ( x)}
1 +ν
そして、τxy=0 すなわち γxy=0 であるから
γ xy =
1
⋅ {g ' ' ( y ) + f ' ' ( x)} = 0
2G (1 + ν )
g’’(y)=f’’(x)=0 とすれば g’=c2,f’=c3(剛体変位)、g’’(y)=c1=-f’’(x) とすれば g’=
c1y,f’=-c1x(剛体回転)が付加される。そこで、一般には f(x)=g(y)=0 としてよい。
-Elastic 2.15-
〔例題3〕梁の単純曲げ
y
χ=Ay3 と置けば、σx=6Ay,σy=τxy=0 と
なるから、これは図-2.15 のように長方形板の両端
h
x
面にのみ垂直応力が一次的に分布する場合を示し
ており、その作用をモ-メントMで表現すれば
M =∫
h/2
−h / 2
σ x ydy =
A 3
h
2
→
A=
M
2M
h3
M
図-2.15 単純曲げ
したがって、σx=12My/h3,σy=τxy=0 である。
次に、∇2χ=6Ay であるから、式(2.39)を通じてφを求めると
6 Ay =
∂ 2φ
∂x∂y
∂φ
= 3 Ay 2 + f ' ( x)
∂x
→
φ = 3 Axy 2 + f ( x) + g ( y )
→
xy2 は調和関数でないから、φが調和関数になるように f=-Ax3 と決めれば、φ=A(3xy2-x3)、
そして変位は式(2.38)より次のように得られる。
2Gu = 0 +
2Gv = −
1 2M
12 Mxy
⋅ 3 (6 xy ) =
1 +ν h
(1 + ν )h 3
→ u=
12 Mxy
Eh 3
6 My 2
1 2 M (3 y 2 − 3 x 2 )
6 M ( x 2 + νy 2 )
+
⋅
=
−
⋅
1 +ν
1 +ν
h3
h3
h3
→ v=−
6 M ( x 2 + νy 2 )
Eh 3
円板や扇形板の問題では極座標を用いるのが便利であるが、極座標で応力をある関数の微分形で
表示することは容易ではない。そこで、座標変換によって直角座標における応力から極座標におけ
る応力を導くことにする。すなわち、座標変換は前節〔例題2〕を参照して
σr=σxcos2θ+σysin2θ+τxysin2θ
σθ=σxsin2θ+σycos2θ-τxysin2θ
τrθ=-(σx-σy)/2・sin2θ+τxycos2θ
であるから、これに式(2.33)を代入すれば
⎛ 2 ∂2
∂2 ⎞
∂2
2
⎜
⎟⎟ χ
σ r = ⎜ sin θ 2 + cos θ 2 − sin 2θ
∂
∂
x
y
∂
∂
x
y
⎝
⎠
⎛
∂2
∂2
∂2 ⎞
⎟χ
σ θ = ⎜⎜ cos 2 θ 2 + sin 2 θ 2 + sin 2θ
∂x∂y ⎟⎠
∂x
∂y
⎝
⎧1
⎛ ∂2
∂2
−
2
∂y 2
⎝ ∂x
τ rθ = ⎨ sin 2θ ⎜⎜
⎩2
(2.40)
⎞
∂2 ⎫
⎟⎟ − cos 2θ
⎬χ
x
y
∂
∂
⎠
⎭
偏微分の性質を利用してx,yによる微係数をr,θによる微係数に変えると(途中省略)
-Elastic 2.16-
1 ∂χ 1 ∂ 2 χ
+
⋅
r ∂r r 2 ∂θ 2
σr = ⋅
σθ =
∂2χ
∂r 2
τ rθ =
1 ∂χ 1 ∂ 2
∂ ⎛ ∂χ ⎞
⋅
− ⋅
=− ⎜
⎟
2
∂r ⎝ r∂θ ⎠
r ∂θ r ∂r∂θ
(2.41)
次にr,θ方向の変位をur,vθ とすれば、右図より
ur=ucosθ+vsinθ,vθ=-usinθ+vcosθ
U
v
y
であるから、これに式(2.38)のu,vを代入すれば
vθ
⎛ ∂χ
⎛ ∂χ
1 ∂φ ⎞
1 ∂φ ⎞
⎟⎟ cos θ + ⎜⎜ −
⎟⎟ sin θ
2Gu r = ⎜⎜ −
+
⋅
+
⋅
⎝ ∂x 1 + ν ∂y ⎠
⎝ ∂y 1 + ν ∂x ⎠
ur
u
r
θ
x
⎛ ∂χ
⎛ ∂χ
1 ∂φ ⎞
1 ∂φ ⎞
2Gvθ = −⎜⎜ −
+
⋅ ⎟⎟ cos θ
+
⋅ ⎟⎟ sin θ + ⎜⎜ −
⎝ ∂y 1 + ν ∂x ⎠
⎝ ∂x 1 + ν ∂y ⎠
両式右辺の微分をr,θの微分に置き換えるために、応力関数χと
∇2χ =
∂2
( rψ )
∂r∂θ
(2.42)
なる関係を有する新たな調和関数Ψ(∇2Ψ=0)を導入すれば
2Gu r = −
∂χ
∂ψ
1
+
⋅r
∂r 1 + ν
∂θ
∂ψ
1 ∂χ
1
2Gvθ = − ⋅
+
⋅r2
r ∂θ 1 + ν
∂r
(2.43)
〔例題4〕等分布荷重を受ける円板
r2 は重調和関数だから χ=Ar2 と置けば、式(2.41)より
p
σr=2A,σθ=2A,τrθ=0
そこで、2A=-p と置けば
a
σr=-p,σθ=-p,τrθ=0
この解は (σr)r=a=-p,(τrθ)r=a=0 となるから、図-2.16 のよう
に周辺に等分布圧力pを受ける円板の応力状態を表している。変位
を求めるためには式(2.42)より、まずΨを求めなければならないか
ら、∇2χ=-2p であることに注目して、順次積分すれば
∂2
( rψ ) = − 2 p
∂r∂θ
→
図-2.16
円板の問題
∂
(rψ ) = −2 pr + g ' (θ )
∂θ
rψ = −2 prθ + g (θ ) + rf (r )
ψ = −2 pθ + g (θ ) / r + f (r )
θは調和関数であるから g=f=0 と置けば Ψ=-2pθ であり、式(2.43)より次式を得る。
ur = −
p (1 − ν )r
E
vθ = 0
-Elastic 2.17-
※応力成分を求めたあと、応力~ひずみ関係とひずみ~変位関係を用いて、r,θ方向のひずみを
積分する形で変位を計算しても同じ答えを得る。
εr =
∂u r σ r − νσ θ
p (1 − ν )
=
=−
∂r
E
E
εθ =
∂vθ u r σ θ − νσ r
p (1 − ν )
+
=
=−
r∂θ
r
E
E
→
ur = −
→
p (1 − ν )r
E
∂vθ
= 0 → vθ = 0
∂θ
〔例題5〕円孔面に内圧を受ける無限板
図-2.17 の円孔を有する無限板では、中心r=0 で応力は無限
大になっても良いが、r→∞ではゼロにならなければならない。
p
r→∞でゼロになる調和関数は、どこかに必ず特異点をもつ必
要があるので、r=0 に特異点をもつ関数を用い、応力がθに
無関係であることに注目して、χ=Blogr と置けば
2
a
2
σr=B/r ,σθ=-B/r ,τrθ=0
∇2χ=0 であるから、式(2.42)より
∂2
( rψ ) = 0
∂r∂θ
→
ψ =0
→
2Gu r = −
B
r
2Gvθ = 0
図-2.17
円孔の問題
ここで、(σr)r=a=-p でなければならないから、B=-pa2 となり、結局、次の解を得る。
a2 p
σr =− 2
r
a2 p
σθ = 2
r
1 +ν a2 p
ur =
⋅
E
r
τ rθ = 0
vθ = 0
※前例題と同様に、r,θ方向のひずみを積分する形で変位を計算すると
εr =
∂u r σ r − νσ θ
a 2 p 1 +ν
=
=− 2 ⋅
∂r
E
E
r
εθ =
∂vθ u r σ θ − νσ r a 2 p 1 + ν
+
=
= 2 ⋅
r∂θ
r
E
E
r
→
1 +ν a 2 p
dr ⎡ − 1⎤
=
→
=
⋅
u
r
∫ r 2 ⎢⎣ r ⎥⎦
E
r
∂vθ
=0
→
∂θ
〔例題6〕内外圧を受ける円板
図-2.18 のような場合は、応力関数は同心円内においての
み特異点をもたないものでなければならず、原点に特異点を
a
もつ関数と無限遠点に特異点をもつ関数の一次結合で与えら
p2
p1
れる。すなわち
χ=Ar2+Blogr
b
(a)
と置けば、式(2.41)より
σr=2A+B/r2 ,σθ=2A-B/r2 ,τrθ=0
-Elastic 2.18-
(b)
図-2.18
同心円板の問題
よって、(σr)
=-p1,(σr)
r=a
=-p2 と置けば
r=b
2A+B/a2=-p1,2A+B/b2=-p2
(c)
となり、両式を解いてA,Bを求め、式(b)に代入して
σr =
a2
b2 − a2
⎧⎛ b 2
⎨⎜⎜1 − 2
r
⎩⎝
⎞
⎛ b2 b2
⎟⎟ p1 − ⎜⎜ 2 − 2
r
⎠
⎝a
⎞ ⎫
⎟⎟ p 2 ⎬
⎠ ⎭
σθ =
a2
b2 − a2
⎧⎛ b 2
⎨⎜⎜1 + 2
⎩⎝ r
⎞
⎛ b2 b2
⎟⎟ p1 − ⎜⎜ 2 + 2
r
⎠
⎝a
⎞ ⎫
⎟⎟ p 2 ⎬
⎠ ⎭
(d)
変位を求めるためには〔例題4,5〕を参照して、Ψ=4θA になるから
2(1 − ν )
B
2Gu r =
rA −
r
1 +ν
→
1 − ν a 2 p1 − b 2 p 2
1 + ν a 2 b 2 ( p1 − p 2 ) 1
ur =
r+
⋅
⋅
⋅
E
E
r
b2 − a2
b2 − a2
(e)
この結果は材料力学で導いた結果に一致する(※)。
※材料力学では、sin(dθ/2)≒dθ/2 として半径方向の平衡式が
σr(rdθ) - (σr+dσr )(r+dr)dθ + σθ(drdθ)=0
dσ r
dr
+
= 0
r
σ r − σθ
整理して
・・・①
σr, σθ はθを含まず、εz はrに無関係(平面保持)で
y
σθ
dε z d ⎡ 1
⎤
= ⎢ {σ z − ν (σ r + σ θ )}⎥ = 0
dr dr ⎣ E
⎦
dσ r dσ θ
→
+
= 0 (σ z = 0)
dr
dr
より
(σr+σθ)=const.=c1
②を①に代入して
積分して
σr =
σr
dσ r
dr
+
= 0
2σ r − c1
r
c1
c
B
+ 22 = 2 A + 2
2
r
2r
σθ =
σθ
dθ
θ
・・・②
(1/2)ln(2σr-c1)+lnr=const.
σr+dσr
dr
r
→
r2(2σr-c1)=c2
c1
c
B
− 22 = 2 A − 2
2
r
2r
・・・>
式(b)
境界条件より A,B を決めて、式(d)を得る。また、変形は
εr =
du r
1
1
= {σ r − ν (σ θ + σ z )} = (σ r − νσ θ )
dr
E
E
-Elastic 2.19-
を積分して
・・・>
式(e)
x
ある関数をVとして、薄い板がその面内に
X =−
∂V
∂x
Y =−
∂V
∂y
(2.44)
なる物体力X,Yを受ける場合を考える。重力や遠心力などの物体力は全てこのような形で与えら
れるからである。(重力の場合、物体力:Y=-∂V/∂y=-mg → V=mg×y=γy)
特解は σx=V,σy=V,τxy=0 であるから
σx =
∂2χ
+V
∂y 2
σy =
∂2χ
+V
∂x 2
τ xy = −
∂2χ
∂x∂y
(2.45)
は応力のつり合い式(2.22)を満足し、適合条件式(2.23)に式(2.44)を代入すれば
⎛ ∂X ∂Y ⎞
⎟⎟ = (1 + ν )∇ 2V
∇ 2 (σ x + σ y ) = −(1 + ν )⎜⎜
+
⎝ ∂x ∂y ⎠
(2.46)
これに式(2.45)を代入すれば、χが満足すべき方程式は次のようになる。
∇ 2 (σ x + σ y ) = ∇ 4 χ + 2∇ 2V = (1 + ν )∇ 2V
※平面ひずみでは
∇4χ = −
→ ∇ 4 χ = −(1 − ν )∇ 2V
(2.47)
1 − 2ν 2
∇V
1 −ν
次に変位を求めるために、φを任意の調和関数として式(2.46)より(φが調和関数:∇2φ=0 な
ら、式(2.48)に∇2 を行うと右辺第1項が消える)
σx +σ y =
∂ 2φ
+ (1 + ν )V
∂x∂y
(2.48)
になるから、式(2.36)に式(2.45)(2.48)を代入すれば、変位は物体力がない場合と同じ式で表され
∂u
∂2χ
∂ 2φ
1
= − 2 −V +
⋅
+V
2G
∂x
1 + ν ∂x∂y
∂x
2Gu = −
∂χ
1 ∂φ
+
⋅
∂x 1 + ν ∂y
2Gv = −
などより
∂χ
1 ∂φ
+
⋅
∂y 1 + ν ∂x
(2.49)
ただし、χとφの関係は異なり、式(2.48)に式(2.45)を代入すれば次のようになる。
∇ 2 χ + 2V =
∂ 2φ
+ (1 + ν )V
∂x∂y
→
∂ 2φ
= ∇ 2 χ + (1 − ν )V
∂x∂y
-Elastic 2.20-
(2.50)
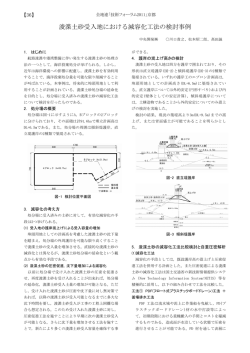
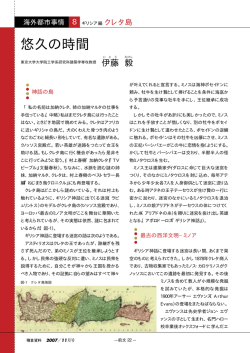
〔例題7〕自重を受ける板
図-2.19 のように、垂直に吊るされた長方形板に単位体積当りγの自
y
重が作用すれば、X=γ,Y=0 であるから、式(2.44)より
V=-γx
(a)
L
である。そして ∇2V=0 であるから、式(2.47)よりχは ∇4χ=0 を
a
a
満足すればよい。そこで
χ=Ax3+Bx2
(b)
x
と置けば、式(a)(b)を式(2.45)に代入して
σx=2B-γx
図-2.19
σy=6Ax-γx
よって A=γ/6 と置けば
τxy=0
自重を受ける板
(c)
(σy)y=±a=0 となり、(σx)x=L=0 と置けば B=γL/2 となり境界条
件が満足される。結局、応力関数χと3つの応力成分は次式で与えられる。
⎛ x3 L 2 ⎞
+ y ⎟⎟
⎝ 6 2 ⎠
χ = γ ⎜⎜
(d)
→
σx=-γ(x-L),σy=0,τxy=0
(e)
変位を求めるためには式(2.50)より
∂ 2φ
= γ (νx + L)
∂x∂y
∂φ
= γ (νxy + Ly + f ' ( x) )
∂x
φ = γ (νx 2 y / 2 + Lxy + f ( x) + g ( y ) + c)
ここで x2y は調和関数ではないから
g(y)=-νy3/6
f(x)=0
c=0
(f)
となり、φは調和関数となって、式(d)(f)を式(2.49)に代入すれば、次式を得る。
γ ⎛
u = ⎜⎜ Lx −
E⎝
x2 + y2 ⎞
⎟
2 ⎟⎠
v=
γ
E
( x − L)νy
(g)
ux=0=-γy2/2E,vx=0=-νγLy/E であるから、辺x=0 で変位が拘束されなければ上の結
果は正しいが、x=0 が固定される場合には、この結果は固定辺近傍を除いて適用できる。そして
v x=L = 0
u x=L =
γ L2
(h)
2E
となって材料力学で得られる結果に一致する(※)。
※材料力学では以下のように誘導される。
x
σx=γ(L-x),εx=σx/E
x
u x = ∫ ε x dx =
0
γ ⎛
2
x
⎜⎜ Lx −
2
E⎝
⎞
⎟⎟
⎠
2a
L
→
(u x ) x = L =
γL
2
2E
-Elastic 2.21-
dx
© Copyright 2026 Paperzz