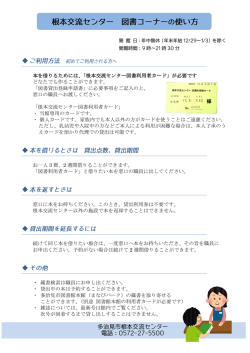
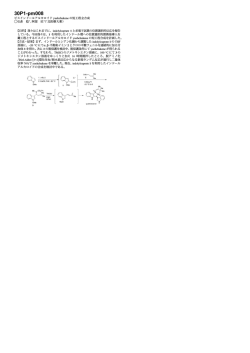
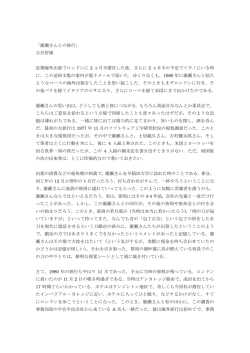
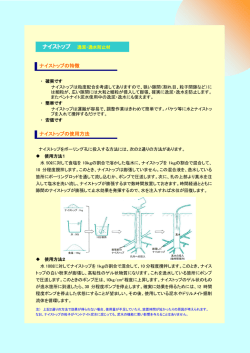
派生証券価格の解法について 早稲田大学大野研究室ファイナンスチーム 2004 年 12 月 目次 第 1 章 はじめに 1 第 2 章 偏微分方程式アプローチ 3 2.1 2.2 2.3 2.4 2.5 偏微分方程式が導出されるまで . . . . . . . . . . . . . . . . . . . . . . . . . 3 2.1.1 常微分方程式となる場合 . . . . . . . . . . . . . . . . . . . . . . . . . 3 2.1.2 偏微分方程式となる場合 . . . . . . . . . . . . . . . . . . . . . . . . . 3 2.1.3 微分の階数について . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 常微分方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 2.2.1 1 階常微分方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 2.2.2 2 階常微分方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 原資産過程による常微分方程式の違い . . . . . . . . . . . . . . . . . . . . . . 14 2.3.1 幾何ブラウン運動過程のとき . . . . . . . . . . . . . . . . . . . . . . 14 2.3.2 算術ブラウン運動過程のとき . . . . . . . . . . . . . . . . . . . . . . 14 2.3.3 平均回帰過程のとき . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 偏微分方程式 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 2.4.1 変数変換 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 2.4.2 変数分離法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 2.4.3 ダランベール法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 2.4.4 フーリエ変換 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 ブラック・ショールズ偏微分方程式の解法 . . . . . . . . . . . . . . . . . . . 19 第 3 章 期待値アプローチ 23 3.1 期待値アプローチとは . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 3.2 期待値アプローチの解法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 3.3 期待値アプローチによる BS 式の導出 . . . . . . . . . . . . . . . . . . . . . . 23 3.3.1 期待値 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 3.3.2 2 つの積分 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 3.3.3 式の各部分の整理 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26 3.4 ツリーモデル . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27 3.5 モンテカルロ・シミュレーション法 . . . . . . . . . . . . . . . . . . . . . . . 28 3.5.1 ツリーモデルへのモンテカルロ法の適用 . . . . . . . . . . . . . . . . 28 i 3.5.2 株価の確率微分方程式を設定して,その振舞いを乱数を用いてシミュ レーションする場合 . . . . . . . . . . . . . . . . . . . . . . . . . . . 29 第 4 章 数値解法 31 4.1 有限差分法とは . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31 4.2 差分近似の方法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31 4.3 差分近似の誤差 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32 4.3.1 前進差分および後退差分の近似誤差 . . . . . . . . . . . . . . . . . . . 32 4.3.2 中心差分の近似誤差 . . . . . . . . . . . . . . . . . . . . . . . . . . . 33 4.3.3 2 階偏導関数の差分の近似誤差 . . . . . . . . . . . . . . . . . . . . . 33 4.4 陽解法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33 4.5 陰解法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35 4.6 クランク・ニコルソン法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36 第 5 章 シミュレーション 39 5.1 モンテカルロシミュレーションとは . . . . . . . . . . . . . . . . . . . . . . . 39 5.2 一様乱数から正規乱数への変換 . . . . . . . . . . . . . . . . . . . . . . . . . 39 5.3 5.2.1 Box-Muller 法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40 5.2.2 逆関数法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40 シミュレーションの精度 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40 5.3.1 5.4 分散減少法 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41 モンテカルロシミュレーションによる価格評価 . . . . . . . . . . . . . . . . . 42 5.4.1 B-S モデル . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42 5.4.2 アベレージオプション . . . . . . . . . . . . . . . . . . . . . . . . . . 42 参考文献 45 ii 第1章 はじめに 本稿は,ファイナンスにおける派生証券価格導出のための解法について調べる1 .用いられ る解法の種類を大別すると, • 偏微分方程式アプローチ • 期待値アプローチ となり,そこから得られる解の種類を大別すると, • 解析解 • 数値解 • シミュレーション解 となる.図 1.1 に,これらの解法と解の種類の関係をまとめる. 本稿は以下のように構成される.第 2, 3 章でそれぞれ,偏微分方程式アプローチと期待値 アプローチについて述べる.第 4 章で数値解法,第 5 章でシミュレーションについて述べる. 1 リアルオプション・アプローチにおける企業価値(事業価値)も,複製可能性を仮定すれば,派生証券価格 と同様の解法によって解くことができる. 1 第1章 はじめに 図 1.1: 派生証券価格のさまざまな解法 2 第2章 2.1 偏微分方程式アプローチ 偏微分方程式が導出されるまで ¡ ¢ n 個の原資産 S1 (t), S2 (t), . . . , Sn (t) からなる派生証券 F S1 (t), S2 (t), . . . , Sn (t), t の価格 を求めたい.このとき,与えられる情報は, • 確率微分方程式 dS1 , dS2 , . . . , dSn ¡ ¢ • 満期 T が存在する場合,F S1 (T ), S2 (T ), . . . , Sn (T ), T • Sk (t) に対する境界条件 ¡ ¢ である.これらの条件の下で,伊藤の公式を用いて dF を計算すると,F S1 (t), . . . , Sn (t), t の確率微分方程式 (SDE) が導かれる.この確率微分方程式から • 条件付き請求権分析(無リスクポートフォリオの構築) • 動的計画法(期待利益最大化アプローチ) を用いて確率項を消去すると,偏微分方程式 (PDE)(あるいは常微分方程式 (ODE))が得 られ1 ,これを解くことで派生証券の価格を求める. 2.1.1 常微分方程式となる場合 n = 1, T = ∞ のとき,確率項を消去すると常微分方程式が得られる.これは派生証券が 時間に依存せず,F (S1 (t)) となるため, 1 dF = F 0 dS1 + F 00 (dS1 )2 2 (2.1) となるからである. 2.1.2 偏微分方程式となる場合 T < ∞, あるいは n ≥ 2 のとき,確率項を消去すると偏微分方程式が得られる.例えば ¡ ¢ n = 2, T < ∞ のとき,F S1 (t), S2 (t), t となり, dF = ∂F ∂F 1 ∂2F 1 ∂2F ∂ 2F ∂F 2 2 dS1 + dS2 + (dS ) + (dS ) + dS1 dS2 + dt (2.2) 1 2 2 2 ∂S1 ∂S2 2 ∂S1 2 ∂S2 ∂S1 ∂S2 ∂t となるからである. 1 SDE とは,Stochastic Differential Equation の略であり,PDE は Partial Differential Equation, ODE は Ordinary Differential Equation の略である. 3 第2章 偏微分方程式アプローチ 2.1.3 微分の階数について (2.1), (2.2) 式より,派生証券の従う微分方程式は 2 階となる2 .したがって,基本となる 1 階微分方程式については概観し,2 階微分方程式を中心に議論する. 2.2 常微分方程式 独立変数 x とその関数 y(x) および導関数 y 0 , y 00 , . . . , y (n) の間の関係式 ¡ ¢ F x, y(x), y 0 (x), . . . , y (n) = 0 (2.3) を y に関する常微分方程式という.微分方程式に含まれる導関数の最高階数を,その微分方 程式の階数 (order) という.微分方程式が an y (n) + an−1 y (n−1) + · · · + a1 y 0 + a0 y = b(x) (2.4) の形で表わせるとき,すなわち未知関数とその導関数についての 1 次式で表わせるとき,線 形 (linear) であるといい,そうでないときを非線形 (nonlinear) であるという(係数は独立 変数の関数でもよい).また b(x) = 0 のとき,(2.4) 式を同次あるいは斉次 (homogeneous) 方程式といい,b(x) 6= 0 のとき,非同次あるいは非斉次 (nonhomogeneous) 方程式という3 . 微分方程式に代入したとき,方程式をある区間上で恒等的に満たすような関数を微分方程 式の解 (solution) といい,解を求めることを微分方程式を解く (solve) という.解が y = f (x) という式で与えられるとき,この解を解析解という.解が陰関数 G(x, y) = 0 の形で与えら れるとき,数値解となる. 常微分方程式を解析的に解くためには,積分を有限回行なってこの未知関数を求める求積 法 (quadrature) を用いる.しかし,求積法で解ける微分方程式は限られており,求積法で 解けない微分方程式では解を級数,数値計算,グラフを使って近似する. 以下では次に挙げる,解析解が得られる代表的な例を説明していく. • 1 階常微分方程式 — 変数分離形 [1, pp.35-39] — 同次形 [1, pp.39-45] — 線形 — 非線形だが線形に変形できるもの 2 3 ∗ ベルヌーイ型 分数ブラウン運動を用いる場合,その限りでないかも知れない. 独立変数 x, y の関数 f (x, y) f (tx, ty) = tn f (x, y) のとき,f は変数 x と y について n 次同次関数であるという.ただし,n は非負の整数である. し た がって 線 形 方 程 式 な ら ば b(x) = 0 な ら ば 必 ず 同 次 方 程 式 で あ る が ,非 線 形 方 程 式 な ら ば , f (y, y 0 , y 00 , . . . y (n) ) が同次関数のときに限って同次方程式となる. 4 2.2. 常微分方程式 ∗ リッカチ型 ∗ ダランベール型(ラグランジュ型) • 2 階常微分方程式 — 定数係数線形 — 変数係数線形 [1, pp.116-117] ∗ オイラー型 — べき級数法 [2, 3] — ラプラス変換 2.2.1 1 階常微分方程式 変数分離形 1 階常微分方程式において, dy = f (x)g(y) dx (2.5) なる形のものを変数分離形といい,微分方程式の中でもっとも基本的な形である.1 階常微 分方程式は,変数分離形に帰着させることで解析解が得られる. g(y) 6= 0 のとき,(2.5) 式の両辺を g(y) で除すると, 1 dy = f (x) g(y) dx となり,両辺を x で積分すると, Z 1 dy dx = g(y) dx となって,一般解 が得られる. Z 1 dy = g(y) Z Z (2.6) f (x)dx + C f (x)dx + C (2.7) (2.8) 同次形 1 階常微分方程式において, ³y´ dy =h dx x なる形のものを同次形という4 . 4 h µ ty tx ¶ =h ³y´ x = t0 · h であるため,関数 dy/dx は 0 次同次であるという意味であろう. (2.9) ³y´ x 5 第2章 偏微分方程式アプローチ まず,変数変換を行ない, y = ux (2.10) dy du = x+u dx dx (2.11) du x + u = h(u) dx (2.12) du 1 = (h(u) − u) dx x (2.13) とおき,両辺を x で微分すると, となる.このとき,(2.9) 式は となる.したがって, となり,変数分離形に帰着させられる.h(u) 6= u のとき, Z Z 1 du 1 dx = dx + C = log |x| + C h(u) − u dx x となり,一般解 x = A exp µZ ¶ 1 du , h(u) − u A = ±eC (2.14) (2.15) が得られる.この後,u = y/x を代入して,x, y の関係式を導出する. 線形 2 階線形常微分方程式の節で説明する. 非線形だが線形に変形できるもの 非線形微分方程式でも,線形に変形することで解けるものも存在する. 例 2.1 (ベルヌーイ型) dy + P (x)y = Q(x)y n dx (2.16) 1 dy P + n−1 = Q n y dx y (2.17) 両辺を y n で除すると, となる. z= 1 y n−1 (2.18) とおくと, 1 dz + Pz = Q n − 1 dx となり,線形微分方程式が得られる. 6 (2.19) 2.2. 常微分方程式 例 2.2 (リッカチ型) dy + P (x) + Q(x)y + R(x)y 2 = 0 dx (2.20) まず,これを満たす特殊解 η(x) を見つける.次に, y(x) = z(x) + η(x) (2.21) dz + (Q + 2Rη)z + Rz 2 = 0 dx (2.22) とおくと, となり,ベルヌーイ型が得られる. 例 2.3 (ダランベール型) y = xf µ dy dx ¶ +g µ dy dx ¶ (2.23) まず, dy =u dx (2.24) y = xf (u) + g(u) (2.25) dy du du = u = f (u) + xf 0 (u) + g 0 (u) dx dx dx (2.26) とおくと, となり,両辺を x で微分すると, が得られる.u を x の関数とみなして,u − f (u) 6= 0 のとき, dx f 0 (u) g 0 (u) = x+ du u − f (u) u − f (u) (2.27) となり,線形微分方程式が得られる. 2.2.2 2 階常微分方程式 定数係数線形 線形常微分方程式において,係数が定数であるもの a2 y 00 + a1 y 0 + a0 y = b(x) (2.28) を考える.この解は,重ね合わせの原理より y = f (x) + g(x) (2.29) と表すことができる.ただし,f (x) を余関数といい,b(x) ≡ 0 とした斉次方程式を満たす 解であり,g(x) を特殊解といい,b(x) を含んだ式を満たす解である. 7 第2章 偏微分方程式アプローチ 余関数 f (x) は,以下のように求める.まず,(2.28) 式に b(x) ≡ 0, y = eβx を代入すると, a2 β 2 eβx + a1 βeβx + a0 eβx = 0 (2.30) a2 β 2 + a1 β + a0 = 0 (2.31) なる特性(2 次)方程式 Q(β) = 0 が得られる.余関数の形は,この解の種類によって異なる. 1. 異なる実数解のとき 2 つの実数解を β1 , β2 とすると, y1 = eβ1 x , y1 = eβ2 x (2.32) の両方とも解となるはずである.したがって,重ね合わせの原理より,A1 , A2 を定数 として, f (x) = A1 eβ1 x + A2 eβ2 x (2.33) y1 = eβ0 x (2.34) となる. 2. 重解のとき 重解を β0 とすると, は解であるが,微分方程式 (2.28) は 2 階であるので,一般解を得るにはもう 1 つ解が 必要である.特性 2 次方程式 (2.31) は重解をもつため, a21 − 4a2 a0 = 0, ∴ a0 = a21 4a2 (2.35) であるので,(2.31) 式は β2 + µ a1 β+ 2a2 a1 a2 β + 12 = 0 a2 4a2 ¶2 = 0, (2.36) ∴ β0 = − a1 2a2 (2.37) となる.階数低減法より, y2 = eβ0 x Z e − R a1 dx a2 2 (eβ0 x ) dx = eβ0 x Z a − a1 x e 2 a e −2 2a1 x dx = xeβ0 x (2.38) 2 も解となる.したがって,余関数は f (x) = A1 eβ0 x + A2 xeβ0 x となる. 8 (2.39) 2.2. 常微分方程式 3. 異なる虚数解のとき 2 つの虚数解を β1 = p + qi, β2 = p − qi とすると,余関数は f (x) = A1 e(p+qi)x + A2 e(p−qi)x (2.40) eiθ = cos θ + i sin θ (2.41) となるが,オイラーの公式 を用いて三角関数表示することもできる.重ね合わせの原理より, y1 = y2 = e(p+qi)x + e(p−qi)x epx (cos qx + i sin qx) + epx (cos qx − i sin qx) = = epx cos qx 2 2 (2.42) e(p+qi)x − e(p−qi)x epx (cos qx + i sin qx) − epx (cos qx − i sin qx) = = epx sin qx 2i 2i (2.43) も解となる.したがって,余関数は f (x) = B1 epx cos qx + B2 epx sin qx q = epx B12 + B22 sin(qx + φ) (2.44) (2.45) とも表すことができる. 特殊解 g(x) は,b(x) の次数に合わせた多項式を (2.28) 式に代入して,恒等式を解くこと で求める. 変数係数線形 線形常微分方程式において,係数が独立変数 x の関数であるもの y 00 + p(x)y 0 + q(x)y = 0 (2.46) を考える.ここでは,特に斉次方程式について説明する. まず, y(x) = c(x)z(x) (2.47) とおく.これを (2.46) 式に代入して, y 00 + p(x)y 0 + q(x)y = cz 00 + 2c0 z 0 + c00 z + p(cz 0 + c0 z) + qcz µ 0 µ 00 ¶ ¶ ¶ µ 2c c c0 00 0 +p z + +p +q z =c z + c c c (2.48) (2.49) となる.標準形を作るために,z 0 の項の係数を 0 とすると, 2c0 = −p c (2.50) 9 第2章 偏微分方程式アプローチ となり,積分すると, µ ¶ Z 1 x c(x) = exp − p(u)du 2 a が得られる.一方, ¶ µ 1 1 1 2 0 0 0 c = (−c p − cp ) = cp − cp 2 2 2 c00 1 1 = p2 − p0 c 4 2 であるので,z の項の係数は c00 1 c0 1 + p + q = − p0 − p2 + q c c 2 4 となる. 00 以上をまとめると,(2.46) 式は変数変換 µ ¶ Z 1 x y(x) = exp − p(u)du z(x) 2 a (2.51) (2.52) (2.53) (2.54) (2.55) により,標準形 z 00 + Q(x)z = 0 (2.56) に帰着される.ただし, 1 1 Q(x) = q(x) − p2 (x) − p0 (x) 4 2 である.(2.57) 式が定数となるとき,(2.46) 式を解くことができる. (2.57) 変数係数線形(オイラー型) 変数係数線形常微分方程式において,特に y (k) の項の係数が ak xk であるもの a2 x2 y 00 + a1 xy 0 + a0 y = b(x) (2.58) をオイラー型常微分方程式という.この解は,重ね合わせの原理より y = f (x) + g(x) (2.59) と表すことができ,余関数 f (x) は,以下のように求める.まず,(2.58) 式に b(x) ≡ 0, y = xβ を代入すると, a2 x2 β(β − 1)xβ−2 + a1 xβxβ−1 + a0 xβ = 0 (2.60) a2 β 2 + (a1 − a2 )β + a0 = 0 (2.61) なる特性(2 次)方程式 Q(β) = 0 が得られる.この解を β1 , β2 として,A1 , A2 を定数す ると, y1 = A1 xβ1 , y2 = A2 xβ2 (2.62) の両方とも解となるはずである.したがって,再び重ね合わせの原理より f (x) = A1 xβ1 + A2 xβ2 となる. 10 (2.63) 2.2. 常微分方程式 べき級数法 以上までは,求積法による解析解の導出を紹介したが,本節では,べき級数法による近似 解の導出を紹介する.べき級数法とは,微分方程式の解をある点 x0 の周りで (x − x0 ) の正 べき級数に展開して,テイラー級数の形で求める方法である.微分方程式から展開係数が決 まれば,解が求まったことになる. ここでは,特に有効な線形微分方程式 y 00 + p(x)y 0 + q(x)y = r(x) を説明する.まず, y(x) = ∞ X n=0 an (x − x0 )n (2.64) (2.65) とおく.(2.65) 式の右辺に対して項別微分可能であると仮定すると, y0 = y 00 = ∞ X n=1 ∞ X n=2 nan (x − x0 )n−1 = ∞ X (n + 1)an+1 (x − x0 )n n=0 n(n − 1)an (x − x0 )n−2 = が得られる.(2.64) 式より, ∞ X n=0 (n + 2)(n + 1)an+2 (x − x0 )n 0 = y 00 + p(x)y 0 + q(x)y − r(x) = ∞ X n=0 + q(x) n=0 (2.67) (2.68) (n + 2)(n + 1)an+2 (x − x0 )n + p(x) ∞ X (2.66) ∞ X n=0 (n + 1)an+1 (x − x0 )n an (x − x0 )n − r(x) (2.69) となり,x0 , x1 , . . . , x∞ の係数は 0 でなければならないので,a0 , a1 , . . . , a∞ が決まる. このとき,べき級数解が意味をもつのは,べき級数が収束するときである.べき級数の収 束判定法として,ダランベール判定法(収束半径)を紹介する. 定義 2.1 (ダランベール判定法) (2.65) 式が |x−x0 | < ρ のすべての点で収束し,|x−x0 | > ρ のいかなる点でも収束しないとき,ρ を級数の収束半径という.ただし,収束半径は, ρ = lim n→∞ |an | |an+1 | (2.70) で与えられる.すなわち,|x − x0 | < ρ を満たす点 x0 における,べき級数展開のみ意味を もつ解となる. ラプラス変換による解法 [2] ラプラス変換は,微分計算を掛け算に,積分計算を割り算に変換するものである.その結 果, 「微分方程式を解く」ことは, 「代数方程式を解く」ことに帰着される.このため,非斉 次方程式に対して特殊解を直接導出できるという利点があるが, 11 第2章 偏微分方程式アプローチ 図 2.1: ラプラス変換を用いた微分方程式の解法のイメージ • 定数係数線形方程式にしか適用できない • 初期値問題しか解けない という不利点がある. 定義 2.2 (ラプラス変換) 0 ≤ t < ∞ で定義された関数 f (t) に対して, Z ∞ F (s) = e−st f (t)dt (2.71) 0 なる関数 F を f のラプラス変換と呼び,L[f ] などと表す.このとき f を原関数,F を像関 数と呼ぶ. 定義 2.3 (ラプラス逆変換) L−1 [F (s)] = f (t) ⇐⇒ F (s) = L[f (t)] (2.72) が成立するとき,f (t) を F (s) のラプラス逆変換と呼ぶ. f (t) がラプラス変換をもつための十分条件は, • 区分的に連続である • 指数型である5 ことである. 例 2.4 f 00 − 3f 0 + 2f = 4e3t , 5 (f (0) = 0, f 0 (0) = 1) (2.73) f (t) が指数型であるとは, t ≥ a ⇒ |f (t)| ≤ Kebt なる正の定数 a, b, K が存在することである.イメージとしては,遠くの方では指数関数で抑えられるという ことである. 12 2.2. 常微分方程式 L[f (t)] = F (s) とすると,一般に 0 Z ∞ e−st f 0 (t)dt 0 h i∞ Z = e−st f (t) − L[f (t)] = 0 (2.74) ∞ (−s)e−st f (t)dt (2.75) 0 = −f (0) + sF (s) (2.76) である.これを繰り返し行なうと, h i L f (n) (t) = sn F (s) − sn−1 f (0) − sn−2 f 0 (0) − · · · − sf n−2 (0) − f n−1 (0) (2.77) なる一般形が導出できる.したがって, L[f 0 ] = sF (s) − f (0) = sF (s) L[f 00 ] = s2 F (s) − sf (0) − f 0 (0) = s2 F (s) − 1 1 L[e3t ] = s−3 (2.78) (2.79) (2.80) であるので,(2.73) 式のラプラス変換は, L[f 00 − 3f 0 + 2f ] = L[4e3t ] (2.81) L[f 00 ] − 3L[f 0 ] + 2L[f ] = 4L[e3t ] 4 (s2 F − 1) − 3sF + 2F = s−3 (2.82) (2.83) となり,微分方程式 (2.73) は,代数方程式の形として (2.83) 式に変換された.F について 解くと, F (s) = 1 4 + (s − 1)(s − 2) (s − 1)(s − 2)(s − 3) (2.84) 1 3 2 − + s−1 s−2 s−3 (2.85) が得られる.次にラプラス逆変換を行なう.(2.84) 式は, F (s) = と部分分数に分解でき, · · · · ¸ ¸ ¸ ¸ 1 1 1 1 3 2 −1 −1 −1 −1 L − + =L − 3L + 2L s−1 s−2 s−3 s−1 s−2 s−3 = et − 3e2t + 2e3t (2.86) (2.87) が得られる.したがって,微分方程式の解 f (t) = et − 3e2t + 2e3t (2.88) を得ることができる. 13 第2章 2.3 2.3.1 偏微分方程式アプローチ 原資産過程による常微分方程式の違い 幾何ブラウン運動過程のとき 実際に原資産 S(t) が幾何ブラウン運動過程 dS(t) = αS(t)dt + σS(t)dB(t) (2.89) に従うときの,派生証券 F (S(t)) の価格を求める.条件付き請求権分析を用いて,ポート フォリオ Φ = F − θS (2.90) を考える.このとき,ポートフォリオのキャピタルゲインは dΦ = dF − θdS 1 = F 0 dS + F 00 (dS)2 − θdS 2 (2.91) (2.92) であるが,無リスクであるためには θ = F 0 であるので, 1 dΦ = F 00 σ 2 S 2 dt 2 (2.93) となる.また,このポートフォリオのインカムゲインは,配当率を δ とすると −F 0 δSdt (2.94) である.したがって,この無リスクなポートフォリオの期待収益率は,安全利子率 r に等し いので, dΦ − δSF 0 dt = rΦdt 1 2 2 00 σ S F dt − δSF 0 dt = r(F − F 0 S)dt 2 1 2 2 00 σ S F + (r − δ)SF 0 − rF = 0 2 (2.95) (2.96) (2.97) なる常微分方程式が得られる.(2.58) 式より,これはオイラー型常微分方程式であることが 分かるので,F (S(t)) の解は となる. 2.3.2 ¡ ¢β ¡ ¢β F (S(t)) = A1 S(t) 1 + A2 S(t) 2 (2.98) 算術ブラウン運動過程のとき 原資産 S(t) が算術ブラウン運動過程 dS(t) = αdt + σdB(t) 14 (2.99) 2.4. 偏微分方程式 に従うときの,派生証券 F (S(t)) の価格を求める.動的計画法を用いて,最大化問題 h ¡ ¢i F (S(t)) = max E e−ρ(τ −t) S(τ ) − K τ (2.100) を考える.ただし,ρ は割引率,K は投資コスト(行使価格)である.このとき,継続領域 においては F = e−ρdt E [F (S + dS)] (2.101) = (1 − ρdt)E [dF + F ] ¸ · 1 = (1 − ρdt)E F 0 dS + F 00 (dS)2 + (1 − ρdt)F 2 · ¸ 1 00 2 0 0 0 = (1 − ρdt)E F σ dt + F αdt + F σdB − ρF dt 2 1 2 00 0 = σ F + αF 0 − ρF 2 (2.102) (2.103) (2.104) (2.105) なる常微分方程式が得られる.(2.28) 式より,これは定数係数線形常微分方程式であること が分かるので,F (S(t)) の解は F (S(t)) = A1 eβ1 S(t) + A2 eβ2 S(t) (2.106) となる. 2.3.3 平均回帰過程のとき 原資産 S(t) が平均回帰過程 dS(t) = κ(η − S(t))dt + σS(t)dB(t) (2.107) に従うときの,派生証券 F (S(t)) の価格を求める.動的計画法を用いると, 1 2 2 00 σ S F + κ(η − S)F 0 − ρF = 0 2 (2.108) なる常微分方程式が得られる.(2.46) 式より,これは変数係数線形常微分方程式であること が分かり,この解は簡単には求められない. 2.4 偏微分方程式 偏微分方程式とは,独立変数 x, y, z, . . . とこれらを変数とする関数 u, その偏導関数 ux , uy , uxx , uyy , uxy , . . . を含んだ方程式のことをいう. 簡単な偏微分方程式は直接積分して解けるものもあるが,一般的にはほとんど解けること はない.そこで本章では偏微分方程式の 4 つの解法 1. 変数変換 15 第2章 偏微分方程式アプローチ 2. 変数分離法 3. ダランベール法 4. フーリエ変換 を紹介する.また,偏微分方程式の解ける形として有名なものに, a. 準線形方程式 b. ラプラス方程式 c. 波動方程式 d. 熱伝導方程式 がある.4 つの解法を説明しながら,それぞれの方程式を例題として紹介していく. 2.4.1 変数変換 準線形微分方程式の一般形は a(x, y, u)ux + b(x, y, u)uy = c(x, y, u) (2.109) なるものである.ただし,a(x, y, u), b(x, y, u), c(x, y, u) は既知関数とする.定数係数であ る準線形微分方程式において, ux + buy + cu = Q(x, y) (2.110) なる特殊形を考える.このとき,変数変換 ξ = x, η = bx − y を用いることにより ux 項を消 去できる.その解は常微分方程式 u0 + u = Q (2.111) を解くことにより求められる.実際に ξ = x, η = bx − y とおくと, u(x, y) = U (ξ, η) = U (x, bx − y) (2.112) となり,これより, ∂U ∂ξ ∂U uy = ∂ξ ux = ∂ξ ∂U ∂η + = Uξ + bUη ∂x ∂η ∂x ∂ξ ∂U ∂η + = −Uη ∂y ∂η ∂y (2.113) (2.114) となる.以上より, ux + buy + cu = Uξ + cU = Q(ξ, bξ − η) が得られる. 16 (2.115) 2.4. 偏微分方程式 2.4.2 変数分離法 変数分離法は x の関数 X(x) と y の関数 Y (y) の積の解 u(x, y) を捜す方法である.ここで はラプラス方程式 uxx + uyy = 0 (2.116) を例にとって解説する. まず u(x, y) = X(x)Y (y) より,ux = X 0 (x)Y (y), uxx = X 00 (x)Y (y), uy = X(x)Y 0 (y), uyy = X(x)Y 00 (y) が導ける.これらより, X 00 (x)Y (y) + X(x)Y 00 (y) = 0 となる.これを変数分離すると X 00 (x) Y 00 (y) =− X(x) Y (y) (2.117) (2.118) となる.ここで左辺は y と独立で,右辺は x と独立である.これが等しいということは,と もに同じ定数であるということである.この定数を λ とおくと, kx kx if λ > 0, λ = k2 c1 e + c2 e X= c1 cos(kx) + c2 sin(kx) if λ < 0, λ = −k2 c1 x + c2 if λ = 0 2 C1 cos(ky) + C2 sin(ky) if λ > 0, λ = k Y = C1 eky + C2 eky if λ < 0, λ = −k2 C1 y + C2 if λ = 0 となる.ただし,k > 0 である.よってラプラス方程式が解をもつならば,解は kx kx (Ae + Be )(C cos(ky) + D sin(ky)) u(x, y) = のいずれかの形をとる. 2.4.3 (A cos(kx) + B sin(kx))(Ceky + Deky ) (2.119) (2.120) (2.121) (Ax + B)(Cy + D) ダランベール法 ダランベール法とは,2 階定数係数微分方程式 Auxx + Buxy + Cuyy = G(x, y) (2.122) において, 1. 変数変換 v = x + my, w = x + ny とおき, 2. u(x, y) を U (v, w) と v(x, y), w(x, y) の合成関数として, 17 第2章 偏微分方程式アプローチ 3. Uvv と Uww の係数が 0 となるように m, n を選ぶ ことにより,Uvw = G(v, w) を求めるという方法である. 2 階定数係数微分方程式の特殊形である波動方程式 uxx = (1/c2 )uyy , 0 ≤ x ≤ L, y ≥ 0 (2.123) においてダランベール法により解を求める.まず初期条件と境界条件を u(x, 0) = f (x), ut (x, 0) = 0 (2.124) u(0, y) = u(L, y) = 0 (2.125) のように与える.このとき v = x + my, w = x + ny とおくと, u(x, y) = U (v(x, y), w(x, y)) = U (x + my, x + ny) (2.126) となる.これより, ∂U ∂v ∂U ∂w + = Uv + Uw ∂v ∂x ∂w ∂x = Uvv + 2Uvw + Uww ux = uxx (2.127) (2.128) となる.同様にして, uyy = m2 Uvv + 2mnUvw + n2 Uww (2.129) が得られる.これらを波動方程式に代入し,Uvv , Uww の係数が 0 になるためには m = c, n = −c でなければならない.これらをもとの波動方程式に代入し整理すると, u(x, y) = g(x + cy) + h(x − cy) (2.130) となる.ここで初期条件を用いると, u(x, 0) = g(x) + h(x) = f (x) (2.131) uy (x, 0) = cg 0 (x) − ch0 (x) = 0 (2.132) が得られる.これより g 0 (x) = h0 (x) であり,したがって g(x) = h(x) + k である.ただし, k は任意定数である.この g(x) を (2.131) 式に代入して整理すると, f (x) − k 2 f (x) + k g(x) = 2 h(x) = (2.133) (2.134) である.したがって, u(x, t) = となる. 18 f (x + ct) + f (x − ct) 2 (2.135) 2.5. ブラック・ショールズ偏微分方程式の解法 2.4.4 フーリエ変換 定義 2.4 (フーリエ変換,フーリエ逆変換) −∞ < x < ∞ で定義された(複素数値)関数 f (x) が任意の閉区間で滑らかで絶対微分可能(|f (x)| が微分可能)であるとき, Z ∞ ˆ f (k) = f (x)e−ikx dx −∞ と定義し,fˆ(k) を関数 f (x) のフーリエ変換という.ただし,i = F [f ], F[f (x)], F[f ](k) といった記号も使われる.さらに, Z ∞ 1 −1 ˆ fˆ(k)eikx dk F [f (k)] = 2π −∞ (2.136) √ −1 であり,fˆ(k) の他に (2.137) を fˆ(k) のフーリエ逆変換という. フーリエ変換の性質として,導関数 f, . . . , f (n) のフーリエ変換が存在するとき, F [f (n) ] = (ik)n F [f ] (2.138) が成り立つ.次に例題として熱伝導方程式 −∞ < x < ∞, t > 0 ut = κuxx , u(x, 0) = f (x) (2.139) (2.140) をフーリエ変換で解いてみる. u(x, t) の x に関するフーリエ変換を û(k, t) とおく.熱伝導方程式 (2.158) をフーリエ変換 すると,t に関する 1 階常微分方程式 d û(k, t) = −κk 2 û(k, t) dt û(x, 0) = fˆ(k) (2.141) (2.142) が得られる.これら 2 式より, 2 û(x, t) = fˆ(k)e−κk t (2.143) となる.これを逆変換すれば, u(x, t) = Z ∞ −∞ · ¸ f (η) (x − η)2 √ exp − dη 4κt 4πκt (2.144) なる解が得られる(導出略). 2.5 ブラック・ショールズ偏微分方程式の解法 本節では,ブラック・ショールズ (BS) 偏微分方程式を導出し,偏微分方程式の解法を利 用して直接的に解を求める指針を示す. 19 第2章 偏微分方程式アプローチ 株価が幾何ブラウン運動過程 dS(t) = µS(t)dt + σS(t)dB(t) (2.145) に従うとき,伊藤の公式より派生証券の動学は µ ¶ ∂F ∂F ∂F 1 ∂2F 2 2 dF = σ S dt + µS + + σSdB 2 ∂S ∂t 2 ∂S ∂S (2.146) に従うことが分かる. 一方,価格 F (S, t) の派生証券を 1 単位買い,価格 S の株式を ∂F ∂S 単位売る. このポート フォリオの価値は, ∂F S ∂S である.したがって,微小時間でのポートフォリオの変化量は, F (S, t) − dF − ∂F dS ∂S となる.(2.148) 式に (2.145), (2.146) 式を代入して整理すると, ¶ µ ∂F ∂F 1 ∂2F 2 2 dF − σ S dt dS = − ∂S ∂t 2 ∂S 2 (2.147) (2.148) (2.149) となる.ここで右辺に注目すると,dB 項が消去されている.つまり左辺に関して安全利子 率を r とすれば, µ ¶ ∂F ∂F dF − dS = r F (S, t) − S dt ∂S ∂S (2.150) ∂F ∂F 1 ∂2F 2 2 σ S +r + S ∂t 2 ∂S 2 ∂S (2.151) となる.これを整理すれば, rF (S, t) = なる偏微分方程式が得られる.これがブラック・ショールズ偏微分方程式として知られて いる. まず,式を簡単にするために, µ ¶ S σ2 u = log + r− (T − t) X 2 (2.152) x=T −t (2.153) なる変数変換を行なう.ただし,X は行使価格,T は満期である.この変数変換によって F (S, t) を F (S, t) = e−(T −t) y(u, x) = e−x y(u, x) (2.154) のように表現する.したがって, 1 Fs (S, t) = e−rx yu (u, x) ¸ · µ S 2¶ σ −rx Ft (S, t) = e yu (u, x) + ry(u, x) − yx (u, x) − r− 2 e−rx Fss (S, t) = 2 [yuu (u, x) − yu (u, x)] S 20 (2.155) (2.156) (2.157) 2.5. ブラック・ショールズ偏微分方程式の解法 となるので,これによって (2.151) 式は yuu (u, x) − 2 yx (u, x) = 0 σ2 (2.158) のように書き換えられる.これは 2.4.4 節でフーリエ変換の例題として解法を示した熱伝導 方程式である.ここでは 2.4.2 節で解説した変数分離法によって解を求める.そのために, y(u, x) = V (u)W (x) (2.159) とおく.これを (2.158) 式に代入すると,V (u), W (x) に関する 2 つの常微分方程式 Vuu (u) = −k2 V (u) Wx (x) σ2 k2 =− V (x) 2 が導かれる.ただし,k > 0 である.これらを解いて y(u, x) に代入すれば, Z ∞ σ 2 k2 y(u, x) = (C(k) cos(ku) + D(k) sin(ku)) e− 2 x dk (2.160) (2.161) (2.162) 0 となる.ただし,C(k), D(k) は任意関数である.境界条件によってこれらの関数を定めれ ば,ブラックショールズ偏微分方程式の解を求めることができる. 21 第3章 3.1 期待値アプローチ 期待値アプローチとは 期待値アプローチとは,リスク中立化法により利得の現在価値の期待値を計算する方法で ある.コール・オプションの場合,0 時点でのオプション価値は のように表せる. £ ¤ C0 = E∗ e−rT (ST − K)+ (3.1) オプション契約を結んだ投資家が得られる将来利益の「期待値」を考え,それを現時点で の価値に引き戻したものをオプションの価値,すなわちオプション価格とする.この価格決 定理論では,期待キャッシュフローの現在価値が,こうした権利を得るために払う犠牲であ るオプション価格に等しいはずであるということが,その基本的な考え方である. 3.2 期待値アプローチの解法 期待値アプローチにおいては,期待値計算が解析的に行なえる場合には解析解を導出する ことができる.期待値計算が解析的に行なえない場合には,離散近似計算などを実行する方 法が知られている.このような解法としては以下のような方法がある. • 数値解・ ・ ・ツリーモデル • シミュレーション解・ ・ ・モンテカルロシミュレーション 3.3 3.3.1 期待値アプローチによる BS 式の導出 期待値 株価 S ,行使価格 X, 無リスク金利を r,満期期間 T ,ボラティリティを σ とするヨーロ ピアン・コール・オプションの価格を考える.まず,BS モデルでは株価 St は幾何ブラウン 運動過程 dSt = µSt dt + σSt dWt (3.2) に従うとする.ただし,µ は期待収益率,σ はボラティリティであり定数とし,確率過程 Wt は標準ウィナー過程である. 23 第3章 期待値アプローチ 無リスク資産を B とし,微分方程式 dBt = rBt dt (3.3) に従うとする.ただし,無リスク金利 r は一定とする.(3.2) 式を無リスク資産を基準財と して測度変換することにより, dSt = rSt dt + σSt dWt∗ (3.4) が得られる1 .ただし,Wt は実確率測度の下での標準ウィナー過程であるが,Wt∗ はリスク 中立確率測度に関する標準ブラウン運動である. ここで,この確率微分方程式の解を伊藤の公式を利用することにより求める.まず,f (St ) = log St とおくと, ∂f (St ) = 0, ∂t 1 ∂f (St ) = , ∂St St ∂ 2 f (St )) 1 =− 2 2 ∂St St (3.5) であるので,伊藤の公式より ∂f (St ) 1 ∂ 2 f (St ) ∂f (St ) dSt + (dSt )2 dt + ∂t ∂St 2 ∂St2 1 1 1 2 2 = (rSt dt + σSt dWt∗ ) − σ St dt St 2 St2 µ ¶ 1 = r − σ 2 dt + σdWt∗ 2 df (St ) = (3.6) (3.7) (3.8) となる.したがって, ¶ Z T 1 2 df (St ) = σdWt∗ r − σ dt + 2 0 0 µ0 ¶ 1 2 f (ST ) − f (S0 ) = r − σ T + σ(WT∗ − W0 ) 2 µ ¶ 1 2 f (ST ) = f (S0 ) + r − σ T + σWT∗ 2 Z Z T T µ (3.9) (3.10) (3.11) となり,exp(f (ST )) = ST より, µ µ ¶ ¶ 1 2 ∗ ST = exp log S0 + r − σ T + σWT 2 · µ ¶ ¸ σ2 ∗ T = S0 exp σWT + r − 2 (3.12) (3.13) となる. このとき,コールオプションの満期 T 時点におけるコールオプションの価値は 1 C0 = e−rT E∗ [(ST − X)+ ] 測度変換はギルサノフの定理により保証される.dWt と dWt∗ = という関係がある. 24 dWt∗ µ−r dt + dWt σ との間には, (3.14) 3.3. 期待値アプローチによる BS 式の導出 のようになる. (3.13) 式を書き換えてみる.WT は平均 0,分散 T の確率変数である.Z を平均 0,分散 √ 1 の標準正規確率変数とし, T Z を WT に代入すると, · µ ¶ ¸ √ σ2 ST = S0 exp σ T Z + r − T (3.15) 2 であり,したがって, C0 = e−rT E "µ µ ¶ ¸ ¶+ # σ2 S0 exp σ T Z + r − T −X 2 · √ である.ここで,期待値の基本的なルールにより · µ µ ¶ ¸ ¶+ Z √ x2 e−rT ∞ σ2 C0 = √ e− 2 dx S0 exp σ T x + r − T −X 2 2π −∞ (3.16) (3.17) が導かれる. 3.3.2 2 つの積分 (3.17) 式の評価を試みる.まずは,(3.17) 式の最大化関数の部分について, · µ ¶ ¸ √ σ2 S0 exp σ T x + r − T −X >0 2 (3.18) であるとき,C0 の価値は 0 ではなくなる. ここで, を a について解けば, · µ ¶ ¸ σ2 S0 exp σ T a + r − T −X =0 2 a= √ ln(X/S0 ) − (r − σ 2 /2)T √ σ T が得られる.したがって (3.17) 式は, · µ ¶ ¸ ¶ Z µ √ x2 e−rT ∞ σ2 C0 = √ S0 exp σ T x + r − T − X e− 2 dx 2 2π a (3.19) (3.20) (3.21) とすることができる. 次に (3.21) 式の各項について考える.第 2 項について, Z ∞ x2 1 √ −Xe− 2 dx = −X(1 − N (a)) = −XN (−a) 2π a である.一方,第 1 項について, · µ ¶ ¸¶ Z ∞µ √ x2 1 σ2 √ S0 exp σ T x + r − T e− 2 dx 2 2π a ³ ´ Z ∞ 2 √ x2 1 r− σ2 T = √ S0 e eσ T x e− 2 dx 2π a (3.22) (3.23) 25 第3章 期待値アプローチ なる変形を行なう.この積分を扱うには,平方完成を用いる.すなわち, √ √ √ x2 x2 σ2 T σ2 T (x − σ T )2 σ 2 T − σ Tx = − σ Tx + − = − 2 2 2 2 2 2 (3.24) と書き換える.したがって, 1 √ 2π Z ∞ eσ √ 2 T x− x2 a 1 dx = √ 2π Z a ∞ " # √ (x − σ T )2 σ 2 T exp − + dx 2 2 √ である.ここで,y = x − σ T とし,変数変換を行なうと,この積分は, Z ∞ 2 √ σ2 T σ2 T 1 − y2 e 2 √ e dy = e 2 (1 − N (a − σ T )) √ 2π a−σ T となる.結局,(3.17) 式の第 1 項は,eσ 2T (3.25) (3.26) の項を消去して簡単にすると, √ S0 erT N (−(a − σ T )) (3.27) となる. 3.3.3 式の各部分の整理 前節で得られた結果を代入し, £ ¤ C0 = e−rT E (ST − X)+ i h √ = e−rT S0 erT N (−(a − σ T )) − XN (−a) √ = S0 N (−(a − σ T )) − Xe−rT N (−a) (3.28) (3.29) (3.30) と整理する.ここで, a= ln(X/S0 ) − (r − σ 2 /2)T √ σ T (3.31) であるから,明らかに, −a = ln(S0 /X) + (r − σ 2 /2)T √ σ T (3.32) である.また, √ ln(S0 /X) + (r + σ 2 /2)T √ −(a − σ T ) = σ T √ である.したがって,−a = d2 と a − σ T = d1 であり,結局, C0 = S0 N (d1 ) − e−rT XN (d2 ) が得られる.以上より,ブラックショールズのオプション解が得られる. 26 (3.33) (3.34) 3.4. ツリーモデル 図 3.1: ツリーモデル 3.4 ツリーモデル ツリーモデルは,ツリー(樹形)型の価格変動モデルを利用してオプション価格(プレミ アム)を計算する近似計算法である.ツリーモデルは,原資産価格やオプション価格の変動 パターンを樹形に当てはめてみることでオプション価格を見つけだそうとするモデルであ る.オプション価格は原資産価格の動きに付随しているので,将来の原資産価格がわかれば そこから逆算して現在のオプション価格を求めることができる. はじめに,現在の原資産価格から将来の原資産価格を予測する(図 3.1).次に,満期日 のオプションの行使価値(本源価値)を計算し,2 項モデル式 C(n, i) = (1 + r)−1 [pC(n + 1, i + 1) + (1 − p)C(n + 1, i)] (3.35) を使って,満期日のオプション価値から 1 期間ずつ後戻しに計算して,現在のオプション価 値を求めていく.ただし,n は時点,i は i 番目のノード,p はリスク中立確率である. p を「リスク中立」確率と呼ぶのは,以下の理由である.S を原資産の価格,u を株価の 上昇率,d を株価の下降率とするとき,無裁定条件 puS + (1 − p)dS = (1 + r)S (3.36) を満たす p を求めると, p= (1 + r) − d , u−d 0<p<1 (3.37) となる.したがって,p は株価の期待収益率が安全利子率に等しいと仮定する場合の確率で あると解釈できる.これがリスク中立確率といわれる理由は,p が投資家のリスクに対する 選好と無関係に無裁定条件が成り立つ世界で与えられる確率だからである. ここで,行使価格が K のときの,オプションの現在価格を求める.まず, C(0, 0) = (1 + r)−1 [pC(1, 1) + (1 − p)C(1, 0)] (3.38) 27 第3章 期待値アプローチ である.ここで C(1, 1) = (1 + r)−1 [pC(2, 2) + (1 − p)C(2, 1)] (3.39) C(1, 0) = (1 + r)−1 [pC(2, 1) + (1 − p)C(2, 0)] (3.40) であるので, £ ¡ ¢ ¡ ¢¤ C(0, 0) = (1 + r)−2 p pC(2, 2) + (1 − p)C(2, 1) + (1 − p) pC(2, 1) + (1 − p)C(2, 0) (3.41) = (1 + r)−2 [p2 C(2, 2) + 2p(1 − p)C(2, 1) + p2 C(2, 0)] となる.これを繰り返すと, T µ ¶ X T j C(0, 0) = (1 + r)−T p (1 − p)T −j C(T, j) j j=0 T µ ¶ X T j = (1 + r)−T p (1 − p)T −j max(Suj dT −j − K, 0) j (3.42) (3.43) (3.44) j=0 が得られる. 3.5 モンテカルロ・シミュレーション法 モンテカルロ・シミュレーション法では,コンピュータに乱数を発生させて原資産価格の 予測を行ない,満期日の原資産価格の変動を予測する.こうした予測を数千回,数万回と行 ない,予測された原資産価格から各々のオプション価格を求めて合計し,これを試行回数で 割った平均値が満期日のオプション価格となる.これを安全利子率(短期金利)で割り引い たものが現在のオプション価格となる.モンテカルロ・シミュレーションには, 1. ツリーモデルにおける一部のツリーを乱数を用いて選択し,オプションを評価する方法 2. 株価の確率微分方程式を設定し,その振舞いを乱数を用いてシミュレートする方法 の 2 通りがある. 3.5.1 ツリーモデルへのモンテカルロ法の適用 ツリーモデルの問題点は,時間刻みを細かくしたり,経路依存型の派生証券を評価しよう とすると,パスの数が多くなり必要な計算量や設備容量が多くなることであった.この点を 解決する 1 つの方法として,ツリーのすべてのノードを評価するのでなく,その一部をラン ダムに取り出し,評価する方法が考えられる.計算方法としてはまず,経路ごとのペイオフ の計算を行なう.図 3.2 では満期(4 期目)の株価からこの行使価格を差し引き,その結果 と 0 を比較し,大きい方をコールオプションからのペイオフとする.次に期待ペイオフの計 算を行なう.すべての経路のペイオフを合計し,パスの数で割る.最後に無リスク金利で期 待ペイオフを現在価値に割引くことで現在のオプション価格を求める. 28 3.5. モンテカルロ・シミュレーション法 図 3.2: モンテカルロシミュレーション 3.5.2 株価の確率微分方程式を設定して,その振舞いを乱数を用いてシミュレー ションする場合 リスク中立的な株価の確率過程は,ドリフト項を無リスクな資産の収益率,すなわち安全 利子率 r で置き換えると dS̃t = rSt dt + σSt dW̃t (3.45) のようになる.(3.45) 式に対して近似を行なうと, √ S̃(t + ∆t) = S(t) + rS(t)∆t + σS(t)²̃ ∆t (3.46) のように書き直すことができる.ここで,右辺の S(t) は既知の値であり,次期の不確実な 株価は,正規確率変数 ²̃ によって決定される. 次に,1 回の株価のパスについて,そのときのオプション価値を計算する.たとえば,ヨー ロピアン・コールオプションの満期時のペイオフは,行使価格を K とすれば,j 回目のパス で実現した満期の株価 S̃j (T ) から行使価格 K を差し引き,ゼロと比較して大きい値になる. すなわち,C̃j,T = max[S̃j (T ) − K, 0] で計算される.これらの手順を十分な数だけ繰り返す. 一般に「単純な」モンテカルロ法では,十分正確なオプション価値を求めるためには,少な くとも数十万回以上の回数のパスの発生が必要になる. 先ほど求めた満期ペイオフの単純な平均を計算する.オプション価値はこうして得られた 平均値の現在価値を計算することによって得られる.添え字 j を j 回目のパスの発生とし, n 個のパスを発生したとすると, C = e−rT n X Cj , T /n (3.47) j=1 ここで,E[CT ] = ( Pn j=1 Cj , T )/n であり満期におけるこの株式オプションのペイオフの(危 険中立化における)期待値を表す. 29 第3章 期待値アプローチ 図 3.3: 1 回のパスでの満期のオプションペイオフの計算 30 第4章 4.1 数値解法 有限差分法とは 有限差分法は,原資産が満たす偏微分方程式を解くことで派生商品価格を評価する方法で ある.偏微分方程式を差分化し,境界条件を用いてこの差分方程式を再帰的に解くことで現 時点における派生商品価格を求めることができる. この手法の説明のために偏微分方程式としてブラック・ショールズ方程式を用い,派生商 品としてヨーロピアンプットオプションを用いる. ∂F ∂2F ∂F 1 + rS + σ 2 S 2 2 − rF = 0 ∂t ∂S 2 ∂S (4.1) ただし,F をオプション価格,S を原資産,r を安全利子率,σ をボラティリティとする. ここで,オプションの満期を T とし,現時点 0 から満期 T までを等間隔に M 分割する. また,原資産については Smin = 0 とし,十分に大きな Smax を選び,これを等間隔に N 分 割する.したがって,各分割幅は ∆t, ∆S となり ti = i × ∆t Sj = j × ∆S (i = 0, 1, 2, . . . , M ) (j = 0, 1, 2, . . . , N ) (4.2) (4.3) と表現できる.また,便宜上オプション価値 F (ti , Sj ) を Fi,j とする. 4.2 差分近似の方法 時間に関する差分近似には以下の 2 つがあり,前進差分近似は陰解法で用いられ,後退差 分近似は陽解法で用いられる. • 前進差分近似 Fi+1,j − Fi,j ∂F ≈ ∂t ∆t (4.4) Fi,j − Fi−1,j ∂F ≈ ∂t ∆t (4.5) • 後退差分近似 次に,原資産 S に関する 1 階の偏微分の差分近似には以下の 3 種類がある. 31 第4章 数値解法 • 前進差分近似 Fi,j+1 − Fi,j ∂F ≈ ∂S ∆S (4.6) Fi,j − Fi,j−1 ∂F ≈ ∂S ∆S (4.7) Fi,j+1 − Fi,j−1 ∂F ≈ ∂S 2∆S (4.8) • 後退差分近似 • 中心差分近似 最後に,原資産 S に関する 2 階の偏微分の差分近似は以下のようになる. µ ¶ ∂2F ∂ ∂F = ∂S 2 ∂S ∂S µ ¶ Fi,j+1 − Fi,j Fi,j − Fi,j−1 ≈ − /∆S ∆S ∆S Fi,j+1 − 2Fi,j + Fi,j−1 = (∆S)2 4.3 4.3.1 (4.9) (4.10) (4.11) 差分近似の誤差 前進差分および後退差分の近似誤差 S に関する前進差分においては,F (S + ∆S, t) を F (S, t) の回りでテイラー展開すると以 下のような関係が得られる. F (S + ∆S, t) = F (S, t) + ∂F 1 ∂3F 1 ∂2F 2 (∆S) + (∆S)3 + · · · ∆S + ∂S 2! ∂S 2 3! ∂S 3 (4.12) この式を変形すると, ∂F 1 ∂3F F (S + ∆S, t) − F (S, t) 1 ∂2F ∆S − (∆S)2 + · · · = − ∂S ∆S 2! ∂S 2 3! ∂S 3 (4.13) したがって,前進差分による近似は (4.13) 式の右辺第 2 項目以降を打ち切ることを意味し ており,この打ち切りによる誤差は高々∆S のオーダーである.よって, Fi,j+1 − Fi,j ∂F = + O(∆S) ∂S ∆S (4.14) と書ける.同様に,後退差分に関する打ち切り誤差も ∆S のオーダーである. また,まったく同じ議論から,時間に関する前進差分,後退差分の打ち切り誤差も O(∆t) である. 32 4.4. 陽解法 4.3.2 中心差分の近似誤差 前進差分のときと同じように,後退差分についてテイラー展開を行なうと, F (S − ∆S, t) = F (S, t) − ∂F 1 ∂3F 1 ∂2F 2 (∆S) − (∆S)3 + · · · ∆S + ∂S 2! ∂S 2 3! ∂S 3 (4.15) を得る.ここで,(4.12) 式から (4.15) 式を差し引くと, F (S + ∆S, t) − F (S − ∆S, t) = 2 × ∂F 1 ∂3F (∆S)3 + · · · ∆S + 2 × ∂S 3! ∂S 3 (4.16) ゆえに ∂F F (S + ∆S, t) − F (S − ∆S, t) 1 ∂3F (∆S)2 + · · · = − ∂S 2∆S 3! ∂S 3 Fi,j+1 − Fi,j−1 = + O((∆S)2 ) 2∆S (4.17) (4.18) よって,中心差分近似による打ち切り誤差は高々(∆S)2 のオーダーである.したがって,中 心差分近似は前進差分,後退差分近似に比べてより高い精度を持つ. 4.3.3 2 階偏導関数の差分の近似誤差 (4.12) 式に (4.15) 式を加えると, F (S + ∆S, t) + F (S − ∆S, t) = 2F (S, t) + 2 × 1 ∂2F 1 ∂4F 2 (∆S) + 2 × (∆S)4 + · · · 2! ∂S 2 4! ∂S 4 (4.19) ゆえに ∂2F F (S + ∆S, t) − 2F (S, t) + F (S − ∆S, t) 1 ∂4F = − (∆S)2 + · · · ∂S 2 (∆S)2 12 ∂S 4 Fi,j+1 − 2Fi,j + Fi,j−1 = + O((∆S)2 ) (∆S)2 (4.20) (4.21) したがって,S に関する 2 階の偏導関数の差分近似に関する打ち切り誤差は高々(∆S)2 の オーダーである. 4.4 陽解法 陽解法では,差分近似として ∂F/∂S と ∂ 2 F/∂S 2 については中心差分を用い,∂F/∂t に ついては後退差分を用いる. Fi,j+1 − Fi,j−1 ∂F ≈ ∂S 2∆S 2 Fi,j+1 − 2Fi,j + Fi.j−1 ∂ F ≈ ∂S 2 (∆S)2 Fi,j − Fi−1,j ∂F ≈ ∂t ∆t (4.22) (4.23) (4.24) 33 第4章 数値解法 図 4.1: 陽解法における解法手順 これらをブラック・ショールズ方程式 (4.1) に代入して整理すると, Fi−1,j = aj Fi,j+1 + bj Fi,j + cj Fi,j−1 (i = 1, . . . , M ; j = 1, . . . , N − 1) (4.25) ただし, 1 1 aj = σ 2 j 2 ∆t + rj∆t 2 2 bj = 1 − σ 2 j 2 ∆t − r∆t 1 1 cj = σ 2 j 2 ∆t − rj∆t 2 2 (4.26) (4.27) (4.28) 境界条件は,以下の 3 つを用いる. FM,j = max[K − j∆S] Fi,0 = K Fi,N = 0 (j = 0, 1, . . . , N ) (i = 0, 1, . . . , M ) (i = 0, 1, . . . , M ) (4.29) (4.30) (4.31) 以上より,陽解法は時点 i における 3 つのオプション価値 Fi,j+1 , Fi,j , Fi,j−1 を用いて,時 点 i − 1 におけるオプション価値を計算することができるので,満期における境界条件を用 いて再帰的に計算を行なっていけば現在時点におけるオプションの価値を求めることができ る(図 4.1). 陽解法は,時点 i における 3 つのオプションの値と時点 i − 1 における 1 つのオプション の値を関係付けている(図 4.2).また,陽解法は陰解法に比べアルゴリズムが簡単で計算 速度が早いという利点があるが,解の収束性と安定性に注意しなければならない. 34 4.5. 陰解法 図 4.2: 陽解法における 4 点の関係 4.5 陰解法 陰解法では,差分近似として ∂F/∂S と ∂ 2 F/∂S 2 については中心差分を用い,∂F/∂t に ついては前進差分を用いる. Fi,j+1 − Fi,j−1 ∂F ≈ ∂S 2∆S Fi,j+1 − 2Fi,j + Fi.j−1 ∂2F ≈ ∂S 2 (∆S)2 Fi+1,j − Fi,j ∂F ≈ ∂t ∆t これらをブラック・ショールズ方程式 (4.1) に代入して整理すると, Fi+1,j = aj Fi,j+1 + bj Fi,j + cj Fi,j−1 (i = 0, . . . , M − 1; j = 1, . . . , N − 1) (4.32) (4.33) (4.34) (4.35) ただし, 1 1 aj = − σ 2 j 2 ∆t − rj∆t 2 2 2 2 bj = 1 + σ j ∆t + r∆t 1 1 cj = − σ 2 j 2 ∆t + rj∆t 2 2 境界条件は,以下の 3 つを用いる. FM,j = max[K − j∆S] Fi,0 = K Fi,N = 0 (j = 0, 1, . . . , N ) (i = 0, 1, . . . , M ) (i = 0, 1, . . . , M ) (4.36) (4.37) (4.38) (4.39) (4.40) (4.41) 以上より,陰解法とは,時点 i における 3 つのオプション価値と時点 i + 1 における 1 つの オプション価値を関係付けるものである(図 4.3). (4.35) 式は以下のような連立方程式系を構成している. Fi+1,1 = a1 Fi,2 + b1 Fi,1 + c1 Fi,0 Fi+1,2 = a2 Fi,3 + b2 Fi,2 + c2 Fi,1 .. . Fi+1,N −1 = aN −1 Fi,N + bN −1 Fi,N −1 + cN −1 Fi,N −2 (4.42) 35 第4章 数値解法 図 4.3: 陰解法における 4 点の関係 (4.42) 式を行列形式で書き直すと, Fi+1,1 − c1 Fi,0 Fi+1,2 .. . b1 a1 0 c b 2 2 a2 . = .. 0 ... Fi+1,N −2 Fi+1,N −1 − aN −1 Fi,N 0 ... 0 0 ... ... .. . 0 0 cN −2 bN −2 0 cN −1 0 0 .. . Fi,1 Fi,2 .. . aN −2 Fi,N −2 bN −1 Fi,N −1 (4.43) 境界条件 (4.40), (4.41) より,Fi,0 , Fi,N は既知であるから,陽解法と同様に満期時点から時 点を戻して計算していけば現時点のオプション価値を求めることができる.また,陰解法は 陽解法と異なり,解の安定性に優れており,∆S, ∆t をどのように取っても解析解に近い値 となる.これは,陰解法が連立方程式を解くためにある時点のすべての値を用いて解を求め るためである. 4.6 クランク・ニコルソン法 クランク・ニコルソン法では,差分近似として ∂F/∂S と ∂ 2 F/∂S 2 については時点 ti と ti+1 における中心差分の平均値を用い,∂F/∂t については前進差分を用いる. µ ¶ ∂F 1 Fi,j+1 − Fi,j−1 Fi+1,j+1 − Fi+1,j−1 ≈ + ∂S 2 2∆S 2∆S µ ¶ 2 ∂ F 1 Fi,j+1 − 2Fi,j + Fi.j−1 Fi+1,j+1 − 2Fi+1,j + Fi+1,j−1 ≈ + ∂S 2 2 (∆S)2 (∆S)2 Fi+1,j − Fi,j ∂F ≈ ∂t ∆t (4.44) (4.45) (4.46) これらをブラック・ショールズ方程式 (4.1) に代入して整理すると, aj Fi,j+1 + bj Fi,j + cj Fi,j−1 = −aj Fi+1,j+1 + dj Fi+1,j − cj Fi+1,j−1 (i = 0, . . . , M − 1; j = 1, . . . , N − 1) 36 (4.47) 4.6. クランク・ニコルソン法 図 4.4: クランク・ニコルソン法における 6 点の関係 ただし, 1 1 aj = − σ 2 j 2 ∆t − rj∆t 4 4 1 2 2 bj = 1 + σ j ∆t + r∆t 2 1 2 2 1 cj = − σ j ∆t + rj∆t 4 4 1 dj = 1 − σ 2 j 2 ∆t 2 (4.48) (4.49) (4.50) (4.51) 境界条件は,以下の 3 つを用いる. FM,j = max[K − j∆S] Fi,0 = K Fi,N = 0 (j = 0, 1, . . . , N ) (i = 0, 1, . . . , M ) (i = 0, 1, . . . , M ) (4.52) (4.53) (4.54) このような差分近似の作り方から,クランク・ニコルソン法は時点 ti + (∆t)/2 における近 似であると解釈することができる.以上より,クランク・ニコルソンの陰解法は,時点 i に おける 3 つのオプション価値と時点 i + 1 における 3 つのオプション価値を関係付けるもの である(図 4.4). 通常の陰解法と同様に,(4.47) 式は以下のような連立方程式系を構成する. a1 Fi,2 + b1 Fi,1 + c1 Fi,0 = −a1 Fi+1,2 + d1 Fi+1,1 − c1 Fi+1,0 a2 Fi,3 + b2 Fi,2 + c2 Fi,1 = −a2 Fi+1,3 + d2 Fi+1,2 − c2 Fi+1,1 .. . aN −1 Fi,N + bN −1 Fi,N −1 + cN −1 Fi,N −2 = −aN −1 Fi+1,N + dN −1 Fi+1,N −1 −cN −1 Fi+1,N −2 (4.55) 式を行列形式で書き直すと, −a1 Fi+1,2 + d1 Fi+1,1 − c1 Fi+1,0 − c1 Fi,0 −a2 Fi+1,3 + d2 Fi+1,2 − c2 Fi+1,1 . .. −aN −2 Fi+1,N −1 + dN −2 Fi+1,N −2 − cN −2 Fi+1,N −3 −aN −1 Fi+1,N + dN −1 Fi+1,N −1 − ci+1,N −2 − aN −1 Fi,N (4.55) (4.56) 37 第4章 数値解法 b1 a1 0 c b 2 2 a2 . = .. 0 ... 0 ... 0 0 ... ... .. 0 0 .. . . 0 0 cN −2 bN −2 0 cN −1 Fi,1 Fi,2 .. . aN −2 Fi,N −2 bN −1 Fi,N −1 (4.57) 境界条件 (4.53), (4.54) より,Fi,0 , Fi,N は既知であるから,陽解法と同様に満期時点から時 点を戻して計算していけば現時点のオプション価値を求めることができる. 陽解法,陰解法における近似誤差は,原資産に関しては O((∆S)2 ) であり,時間に関して は O(∆t) であった.一方,クランク・ニコルソン法における近似誤差は,原資産に関して は同じく O((∆S)2 ) であるが,時間に関する誤差は以下のように O((∆t)2 ) である. µ µ ¶ ¶ µ ¶ 1 1 1 ∂F 1 F S, t + ∆t + ∆t = F S, t + ∆t + ∆t + 2 2 2 ∂t 2 µ ¶3 1 ∂3F 1 + ∆t + . . . 3! ∂t3 2 ¶ ¶ µ ¶ µ µ 1 1 ∂F 1 1 ∆t + F S, t + ∆t − ∆t = F S, t + ∆t − 2 2 2 ∂t 2 µ ¶3 1 ∂3F 1 − + ... ∆t 3! ∂t3 2 1 ∂2F 2! ∂t2 µ 1 ∆t 2 ¶2 (4.58) 1 ∂2F 2! ∂t2 µ 1 ∆t 2 ¶2 (4.59) (4.58) 式から (4.59) 式を引くと, µ ¶3 1 ∆t + . . . 2 (4.60) µ ¶3 1 (∆t)2 + . . . 2 (4.61) ∂F 2 ∂3F F (S, t + ∆t) − F (S, t) = ∆t + ∂t 3! ∂t3 ゆえに, ∂F F (S, t + ∆t) − F (S, t) 2 ∂3F = − ∂t ∆t 3! ∂t3 Fi+1,j − Fi,j = + O((∆t)2 ) ∆t (4.62) したがって,クランク・ニコルソン法は陽解法,陰解法に比べてより正確な近似である. 38 第5章 5.1 シミュレーション モンテカルロシミュレーションとは シミュレーションとは, 「模擬実験1 」の総称であり,その中で乱数を用いた数値計算を行 なうものの総称をモンテカルロシミュレーションと呼ぶ. オプション商品を含むデリバティブのプライシングは,原資産価格が従う確率過程に基づ いて原資産価格のパスを乱数によって多数生成し,満期時点におけるペイオフの割引現在価 値の平均値を求めるという手順で行われる. オプション商品のプライシングには,解析解や,有限差分法・格子法などの数値計算法な どのアプローチもある.しかし,モデルからは解析解が求められない上に,数値計算法を用 いる場合には,基本的に経路依存性のない商品価格を求める場合にのみ適用可能であるとい う制約が存在する.したがって,エキゾチック・オプションなどの経路依存商品のプライシ ングにおいては,解析解が出ない場合は,原則としてモンテカルロシミュレーションを使わ ざるを得ない. 5.2 一様乱数から正規乱数への変換 モンテカルロシミュレーションを用いる場合,一般的に擬似乱数を用いる2 .この擬似乱 数に求められる性質としては,事象が生起する時間が問題となる場合にはランダム性の高 さ,数値積分では一様性の高さである.デリバティブのプライシングの場合,期待値の積分 演算の近似を行なうことになるため,擬似乱数の一様性の高さが重要になる. ここで,ランダム性とは事象が生起する時系列を考えた時に,その事象の生起に規則性が なく,ランダムであることを指す. また,一様性とは生起させたあとの乱数の分布が,偏りなく一様分布となることを指す. 例えば,発生させる乱数の数が多い場合には,ランダム性と一様性はともに保証される. しかし,発生させる乱数の数が少ない場合には,ランダム性は保証されるが,一様性は保証 されない.このとき,一様性を高めようとすると,生起の仕方にある規則を持たせることが 必要となり,結果としてランダム性が保たれなくなる.したがって,発生させる乱数の数が 少ない場合には,ランダム性と一様性はトレードオフの関係にあると考えられる. 1 物理的あるいは抽象的なシステムをモデルで表現しそのモデルを使って実験を行うことである.実際に模型 を作って行う物理的シミュレーション,数学的モデルをコンピューター上で扱う論理的シミュレーションがあ る.工学上の設計や社会現象の分析などに用いられる. 2 通常のコンピュータには一様乱数 U (0, 1) のルーチンが組み込まれている. 39 第5章 シミュレーション ただし,デリバティブの価格変動を捉えたモデルにおいては,ボラティリティ項を正規分 布に従うと仮定するものが多い.したがって,一様乱数を正規乱数に変換する必要がある. 逆関数法は,任意の分布の乱数を発生させることが出来る.ただし,正規分布に限って は,解析的に標準正規乱数を求めることはできない.標準正規乱数を発生させる代表的な方 法には,中心極限定理を用いるものと Box-Muller 法などがあるが,前者の方法は手間がか かるため,Box-Muller 法を用いることが一般的である.ただし,準乱数を用いる場合には Box-Muller 法は使用できない. 5.2.1 Box-Muller 法 区間 (0, 1) の独立な一様乱数 x1 ,x2 を以下の極座標を用いた変換式によって,2 つの独立 な標準正規乱数に変換する手法である. y1 = 5.2.2 p p −2 ln x1 cos(2πx2 ), y2 = −2 ln x1 sin(2πx2 ) (5.1) 逆関数法 逆関数法は,一般の連続分布に従う乱数を生成する手法として用いられる.ただし,正規 分布の累積確率密度関数の逆関数を解析的に求めることはできないため,逆関数の計算は数 値計算で求められる. 1 p(x) = √ 2π Z x t2 e− 2 dt (5.2) −∞ 逆関数法は,任意の分布の乱数を発生させることが出来る.ただし,正規分布に限っては, 解析的に標準正規乱数を求めることはできない. 5.3 シミュレーションの精度 シミュレーションの実行回数を設定する問題は,必要とする精度と計算負荷に依存する. つまり,単純に試行回数を増加させることでも精度を高めることが出来る.ただし,ここで 言う「精度」とは,標本平均の分布の分散(標本平均誤差)がどれだけ小さいか,を指して いる. しかし精度を追求すれば計算量が非現実的なまでに増大する可能性があるため,より少な い試行回数で推定値の精度を高めるために,分散を減少させる工夫が必要である.この目的 のためには大きく分けて二つの方法がある.一つは分散そのものを減少させる工夫をする分 散減少法3 ,もう一つは確定的な乱数を用いる準乱数である. 3 分散減少法には,対象変数法,制御変数法,加重サンプリング法,2 次サンプリング法,層別サンプリング 法などがある.詳細は,参考文献 [14] を参照.サンプリングとは,分散減少法の中では, (生成された乱数を用 いて)標本を作る,という意味である.つまり,2 次サンプリング法,層別サンプリング法,加重サンプリング 法などは,生成された乱数を修正することで分散を減少させる方法である. 40 5.3. シミュレーションの精度 5.3.1 分散減少法 対称変数法 対称変数法とは,同一の分布に従い,負の相関を持った 2 種類の乱数系列に対してシミュ レーションを実行し,それらの平均をとることで標本平均の分散を減らす方法である. 標準正規乱数の場合には,M = N 2 個の標準正規乱数 x1 , . . . , xM を生成し,残りの半分の 標準正規乱数として −x1 , . . . , −xM を生成し,xM +1 , . . . , xN と置く.このとき,xi に対す るヨーロピアン・コールオプションのペイオフの現在価値(標本変量)は, πi = e−rT max(Si (T ) − K, 0) となる.ただし,Si (T ) = Se(r−σ 2 /2)T +σx i √ T (5.3) とする. これより, (5.3) 式の期待値を取ることで,ヨーロピアン・コールオプションの価格(標 本平均)を, Π = E[π] = N 1 X πi N (5.4) i=1 とする.したがって,オプション価格(標本平均)の分散は, · ¸ π1 + π2 + · · · + πN V [Π] = V [E[π]] = V N 1 = 2 (V [π1 ] + · · · + V [πN ] + 2Cov(π1 , πM +1 ) + · · · + 2Cov(πM , πN )) N (5.5) (5.6) となる.ここで,(π1 , πM +1 ), . . . , (πM , πN ) は負の相関を持っているため,Cov(π1 , πM +1 ), . . . , Cov(πM , πN ) は負の値を取る.よって,オプション価格(標本平均)の分散は小さくなる. 制御変数法 シミュレーションによって得られる標本変量 X と Y のうち,Y の期待値 µY = E[Y ] は ).このとき,ある定数 α に対して, 既知であるとする(Y を制御変数と呼ぶ. Z = X + α(Y − µY ) (5.7) と定義すると,E[Z] = E[X] = µX となる.また分散は, V [Z] = V [X + α(Y − µY )] = V [X + αY ] (5.9) = V [X] + α2 V [Y ] + 2αC[X, Y ] であるから,V [Z] は α∗ = −C[X,Y ] V [Y ] (5.8) (5.10) のとき最小値 V [Z] = V [X] − (C[X, Y ])2 V [Y ] (5.11) 41 第5章 シミュレーション をとる.このような α∗ を設定することで,X が大きな値を取っても V [Z] は補正されるこ とになり,結果的に分散が小さくなる. 一般に,求めたいデリバティブの価格を X とするとき,解析解が既知であり,X に類似 したデリバティブの価格を Y とするため,V [Y ] は既知である.共分散 C[X, Y ] については 未知であることが多いため,最小の分散となる α∗ を厳密に推定することはそれ自体シミュ レーションに頼らざるを得ない.しかし,実際には制御変数さえ適当なものを選べば,α∗ に 厳密性を欠いたとしても十分な分散減少効果が得られる. 5.4 5.4.1 モンテカルロシミュレーションによる価格評価 B-S モデル 原資産価格がリスク中立測度の下で,確率微分方程式 dS = rdt + σdB̃, t ≥ 0; S(0) = S S (5.12) に従っているとする.ただし,r と σ は定数である.このとき, (5.12) 式の解は, S(t) = Seνt+σB̃t , t > 0 σ2 2 で与えられる.ただし,ν = r − (5.13) とする.各 t に対して B̃(t) は平均 0 と分散 t の正規分 布に従っているので,x を標準正規乱数とすれば, √ S(t) = Seνt+σx t , t ≥ 0 (5.14) は時点 t における原資産価格のサンプルである.行使価格を K とするとき,ヨーロピアン・ コールオプションの満期 T でのペイオフ関数を f (S) = max(S(T ) − K, 0) とする.このと き,このオプションの価格は, π = e−rT Ẽ[f (S(T ))] (5.15) であるから,モンテカルロシミュレーションによって価格を推定するためには,平均値を とって, M 1 −rT X π≈ f (S (j) (T )) e M (5.16) j=1 を計算することになる.ただし,S (j) (T ) は (5.14) 式による j 番目のサンプルである. 5.4.2 アベレージオプション 原資産価格がリスク中立測度の下で,確率微分方程式 (5.12) 式に従っているとする.こ こで,時点 [0, T ] を 0 = t0 < t1 < · · · < tn = T と分割し,各時点の原資産価格を S(ti ) と したとき,時点 T までの算術平均 n A(T ) = 1 X S(ti ) n+1 i=0 42 (5.17) 5.4. モンテカルロシミュレーションによる価格評価 に関するコールオプションの満期 T でのペイオフ関数を f (A) = max(A(T ) − K, 0) とする. このとき,コールオプション価格は CA = e−rT E[f (A(T )] (5.18) であるから,モンテカルロシミュレーションによって価格を推定するためには,平均値を 取って CA ≈ M 1 −rT X f (A(j) (T )) e M (5.19) j=1 を計算することになる.ただし,A(j) (T ) は,(5.17) 式の j 番目のサンプルである. また,算術平均 A(T ) の代わりに幾何平均 G(T ) = à n Y ! 1 n+1 S(ti ) i=0 (5.20) を定義し,幾何平均 G(T ) に関するコールオプションの満期 T でのペイオフ関数を f (G) = max(G(T ) − K, 0) とする.このとき,コールオプション価格は CG = e−rT E[f (G(T ))] (5.21) であるから,モンテカルロシミュレーションによって価格を推定するためには,平均値を 取って M 1 −rT X CG ≈ f (G(j) (T )) e M (5.22) j=1 を計算することになる.ただし,G(j) (T ) は,(5.20) 式の j 番目のサンプルである. 次に,分散減少法(制御変数法)を用いる.i 回目のシミュレーションで得られる満期で のペイオフを,それぞれ (i) (i) fA (T ) = max(a(i) (T ) − K, 0), fG (T ) = max(g (i) (T ) − K, 0) (5.23) とすると,アベレージオプションの価格は CA ≈ e−rT M 1 X (i) (i) (fA (T ) − fG (T ) + CG ) M (5.24) i=1 として推定される. 43 参考文献 [1] 稲見武夫: 「常微分方程式」,岩波書店 (1998) [2] 小寺平治: 「なっとくする微分方程式」,講談社サイエンティフィク,pp.156-167 (2000) [3] 杉山昌平: 「常微分方程式例題演習」,森北出版,pp.119-125 (1986) [4] 石村貞夫: 「ブラックショールズ微分方程式」,東京図書 (1999) [5] 森平爽一郎,小島裕: 「コンピュテーショナルファイナンス」,朝倉書店 (2000) [6] 小田信之: 「金融デリバティブズ」,朝倉書店,pp.19-29 (2001) [7] J. スタンプフリ,V. グッドマン: 「ファイナンス数学入門—モデリングとヘッジング—」, 朝倉書店,pp.95-114 (2003) [8] Dixit, A. K. and Pindyck, R. S.: Investment under Uncertainty, Princeton University Press, Princeton (1994) [9] 古川浩一,蜂谷豊彦,中里宗敬,今井潤一: 「基礎からのコーポレート・ファイナンス」, 中央経済社,p.170 (2001) [10] 高見穎郎,河村哲也: 「偏微分方程式の差分解法」,東京大学出版会 (1994) [11] 木島正明,長山いづみ,近江義行: 「ファイナンス工学入門第三部数値計算法」,日科 技連 (2000) [12] ジョン・ハル: 「フィナンシャルエンジニアリング」,金融財政事情研究会 (2000) [13] 森平爽一郎,小島裕: 「コンピュテーショナルファイナンス」,朝倉書店 (2000) [14] 木島正明,長山いづみ,近江義行: 「ファイナンス工学入門 —数値計算法—」,日科技連 (1996) [15] 家田明: 「リスク計量とプライシング」,朝倉出版 (2001) [16] 森平爽一郎,小島裕: 「コンピューテーショナルファイナンス」,朝倉出版 (1997) 45
© Copyright 2026 Paperzz