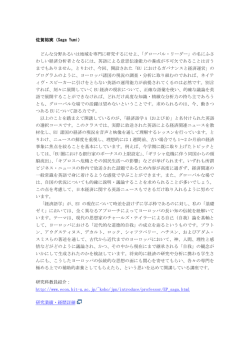
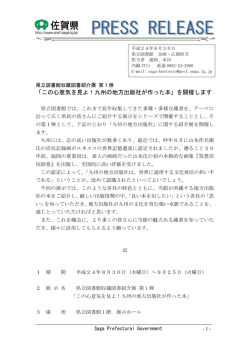
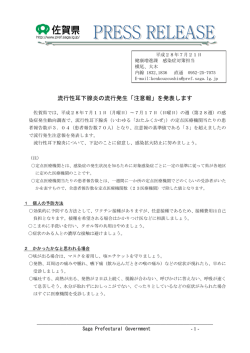
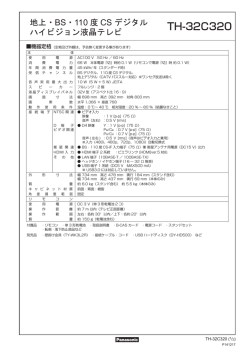
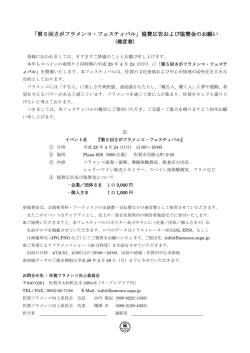
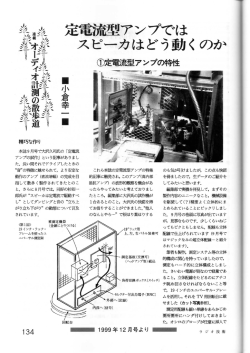
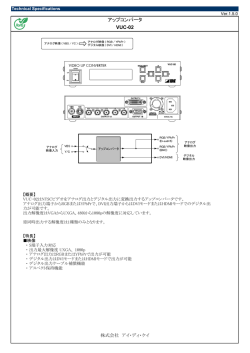
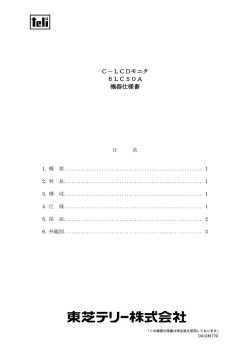
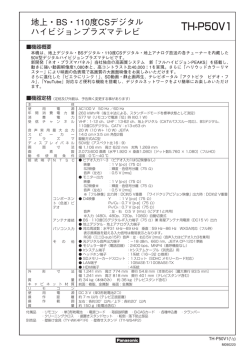
再帰最小 2 乗法による表面筋電図の適応ノイズ除去 橋爪康知 野口義夫 徳島尚生 佐賀大学大学院工学系研究科生体機能システム制御工学専攻 Adaptive noise canceling on surface EM G w ith recursive least−square m ethod. Yasutom o H ashizum e,Yoshio N oguchi,H isao Tokushim a Advanced System s C ontrolEngineering,Saga U niversity,Saga,Japan 1 まえがき 本研究では入力信号 s(n)に測定した筋電図(図 2)、 表面筋電図では、筋内部で発生した 100m V p-p 程度 の活動電位が、人の導体組織中を伝導する際に大幅に 減衰し、皮膚表面では 1m V p-p 程度の微弱な信号とな ってしまうため、ノイズの影響が大きいと考えられる。 そのため、本研究では再帰最小 2 乗(以下 R LS)適応フ ィルタを用いて、筋電図のノイズ除去を試みた。 フィルタへの参照信号 r(n)として、ガウス分布によ り発生させたランダムノイズ信号を用いた。 フィルタによって推定されたノイズ v(n)を図 3 に示 す。 2 R LS(R ecursive LeastSquares)法 R LS 法は信号の統計的性質を使用せず、適応過程 で必要となる逆行列の計算と、フィルタ係数の計算を 逐次的に行なう方法である。 フィルタ係数 w (n)は w (n)= R −1P R (n)= λR (n − 1)+ r(n)r(n)t P = λP (n − 1)+ s(n)r(n) 図 2.s(n):筋電図 と表される。ここで、逆行列のレンマ A −1uutA −1 (A + uut)−1 = A −1 − t −1 1+ u A u を用いることにより、 1 R (n − 1)−1r(n)r(n)tR (n − 1)−1 R −1(n)= R (n − 1)−1 − λ λ + r(n)tR (n − 1)−1r(n) が導かれる。 また、R LS 法には、LM S 法や射影法、学習同定法 などの適応アルゴリズムよりも収束が速いという特徴 がある。ただし、系のインパルス応答が変化する場合 には、他の方法と同程度の収束速度となる。 本研究で用いた R LS 適応フィルタは、IIR 型のフィル タであり、図 1 のようなブロック図で表される。 図 3. v(n):推定されたノイズ 4 考察 R LS フィルタを筋電信号に適用した結果、比較的良 好にノイズ除去をすることができた。しかし、入力信 号の振幅が参照信号と比べ極端に低いところでは、う まく機能しないため、入力信号のレベルに応じて、参 照信号を調節するといった課題が残る。 参考文献 [1]M .H .H ayes:StatisticalD igitalSignalProcessing and M odeling,John W iley&Sons,Inc,1996. [2]M etin Akay:Biom edicalSignalProcessing, Academ ic Press,1994. [3]S.ヘイキン著,武部 幹 訳:適応フィルタ入門, 現代工学社,1987 図 1 R LS 適応フィルタのブロック図 3 R LS フィルタの適用結果
© Copyright 2026 Paperzz