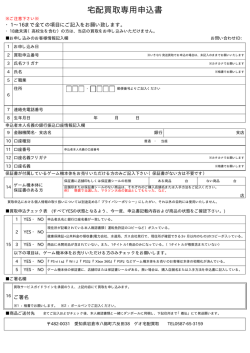
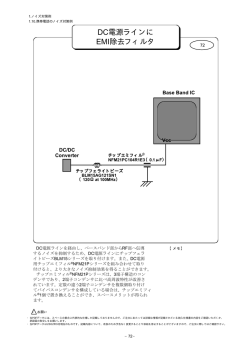
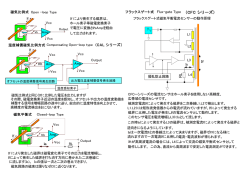
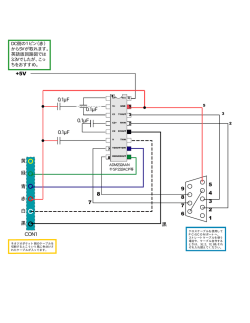
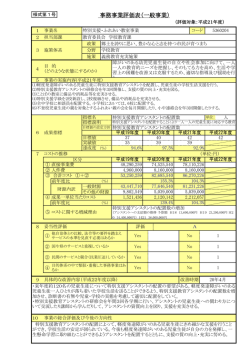
特集◆ づくりと モノ 5 力開発 能 ジャパンマイコンカーラリーに参加して ポリテクカレッジ小山 (小山職業能力開発短期大学校) 阿見 誠・小西大和* 1 .マイコンカーラリー大会とは 1998年 1 月10∼11日に,ジャパンマイコンカーラ リー大会が開かれた。 これはマイコン搭載の自律型走行ロボットが,コ ースに引かれた白い線を読み取りながら 1 周する時 間を競うものである。傾斜がついた立体交差や,90 度クランクのコースがあり, 2 台同時にスタートす る対戦型の競技である。 今年は,第 3 回ということで参加人数が大幅に増 図1 マイコンカー えた。高校の部は北海道内の工業高校や普通高校の 生徒だけでなく,遠く九州からの参加もあった。一 る教育を推進し,新技術への関心と夢を育み,メカ 般の部も関西の人や外国人の参加もあり,全国大会 トロ技術の向上を目指すものである」 どころか国際大会の感があった。参加者募集の広告 また,もう 1 つの特徴は,協賛として日立グルー は,インターネットに掲載されたり専門雑誌に載っ プの全面的なバックアップがあり,参加申し込みを た。 すると案内書と一緒に日立のワンチップマイコンが また,このマイコンカーラリーの開催目的を引用 送られてくることである。それと電源はアルカリ乾 すると次のようになる。まさにモノづくりの典型と 電池 8 本以内という制限や寸法の制限があって,競 でもいうべき明快な言葉である。 技前に厳重な車検がある。 「高校生・中学生ならびに大学等の学生,一般社 大会会場は,北海道札幌国際情報高等学校特設コ 会人に,マイコンカーラリーの競技をとおしてロボ ースである。A,Bの 2 コースがあり,それぞれに ット作りに必要な技術の基礎・基本を習得させると スタートラインがある。 2 台同時にスタートする対 ともに,技術研究の目標を立て,それを実際に解決 戦型で,F1レースさながらに前方のポールに赤と する体験の機会を与え,もって生徒・学生等の学習 緑の信号があり,GOサインを表示する。レースは, 意欲の向上と,自発的,創造的な学習態度の育成に コースを 1 周する時間を競うが,スタート地点の光 資する。併せて遊び心を取り入れたモノづくりによ 電スイッチで自動計測して,百分の 1 秒単位でディ ジタル表示をする。 * 制御技術科学生 22 1 階のコースは,選手と大会役員以外は立入禁止 技能と技術 で,観客は 2 階か 3 階から下を観戦する。 2 .マイコンカーの製作 競技はタイムトライアル形式の予選と決勝トーナ メントがあるが,対戦型の決勝は相手よりも速く走 らないと勝ち残れないので,正確さとスピードの両 日立のワンチップマイコンH8は, 8 ビットポー 方の要素が必要になり技術的に難しくなる。 H-ブリッジ回路 Vcc R1 ライン フォト 読み取り センサ センサ トを 9 個もっていて並列入出力ができる。A/D変 Vcc Vs R2 Vcc ポ ー ト 8 Hブリッ ジドライ ブIC Vcc Vs TA7257 Hブリッ ジドライ ブIC TA7257 ポ ー ト 9 マ イ コ ン ポ H8/532 ポ ー ー ト ト 1 7 Vcc M M Vcc LED ドライブ IC 9638 スイッチ回路 LED ドライブ IC 9638 3色LED 7セグメントLED&LED回路 図2 回路図 START 初期設定 キー入力 Yes ハードテストプ ログラムを実行 Yes ステアリング を左動作設定 Yes ステアリング を右動作設定 No 右側センサに ラインを認識 左側センサに ラインを認識 クランク位置 であるか? マーカ認識 No Yes ※位置補正 クランク先のラインを 検出するまで後退する ステアリングをクランク 先の方向に限界まで切る 動作設定に基づき 動作データを出力 クランク先の ラインを認識 No Yes 図3 3/1998 走行プログラムフロー 23 換機能もあり,PWM信号の出力もできる。 図 1 に製作したマイコンカーを示す。後輪はDC モータ駆動で,前輪はラジコン用のサーボを使用し てかじ取りができる。ライン読み取り用センサは赤 外線センサで,白いラインのカーブしている方向に ステアリングを切る。 図 2 に回路図を示す。スイッチ入力回路やLED 表示回路で,走行状態の設定や表示ができる。 図 3 は,走行プログラムのフローチャートである。 90度のクランクがあるので,そこでいったんバック してステアリングを限界まで切って曲がる。 3 .練習コースの製作 進行方向 マイコンカーを走行させるために,競技規定に従 って小規模なコースを製作した。立体交差や90度ク ランクをもったもので,ベニヤ板に黒いラシャ紙を 貼り,白いビニールテープでラインを引いた。図 4」 に練習コースを示す。 また,コースを 1 周する時間を計測するために, START 初期設定 0.1秒ごとの タイマ 割り込み設定 図4 練習コース ゲートセンサ 情報の 読み込み No センサ認識 Yes タイマ割り込み 許可 タイムカウント 開始 タイムカウント を表示 Yes センサ認識 No ※スタート時 誤動作防止 タイムカウント を表示 センサ認識 No Yes 割り込み禁止 最終タイマカ ウントを表示 END 図5 24 自動計測システム 図6 自動計測フロー 技能と技術 光電スイッチで自動計測をするゲートを製作した。 モノづくりにかかわるときに必ず役に立つと思う。 C言語プログラムによりパソコンの画面に走行タイ そのほかに, 1 つの目標を達成したという満足感が ムを表示する。 次の目標に向かう精神的な強さをもたらした。 図 5 に自動計測システムを,図 6 にフローチャー 学生とロボット作りをして,「先生,次のロボッ ト大会はいつですか」と言いだすほど取り組み方が トを示す。 違ってきた。大会が近いからといって授業をサボっ 4 .大会に参加 てまでロボットを製作したということはなかった し,大会が終わると「さあ,次は卒業研究をやろう」 このマイコンカーラリーには 2 人でそれぞれのロ ボットを製作して出場した。12月には一緒に札幌の と,むしろ普段の生活にけじめがついて,すべてに よい効果をもたらしたロボット大会であった。 会場まで出かけていってロボットの調整をした。 図 7 に会場校の札幌国際情報高等学校の建物を示 す。実習室には 1 年前の大会で使用したコースが設 置してあり,高校生が冬休み返上で練習していた。 このコースを図 8 に示す。 大会は,年が明けて 1 月11日に一般の部が開かれ 〈参考文献〉 1) 阿見:マイコンカーラリー'97北海道大会に参加して, 小山職業能力開発短期大学校研究報告,第12号,1997.3. p.13 2) 阿見:ロボット競技の教育的効果(第 2 報) ,小山職業能 力開発短期大学校,第13回研究発表講演会予稿集,1998. 2.p.3 た。小西のロボットは予選でゆっくりながらコース を完走して決勝に残った。決勝トーナメントではゴ ール直前で惜しくもコースアウトしてしまったが, アクリル板を加工してロボットの車体を作ったのが 認められて,デザイン賞を受賞した。図 9 は一緒に ロボット作りをした卒業研究生である。 5 .大会に参加して学んだこと ロボット競技に参加するという目標に向かって, ロボットを設計・製作して関連のメカトロ技術を習 得したことは,学生にとってはこれからも企業で, 図7 3/1998 札幌国際情報高等学校 図8 前回の大会のコース 図9 卒業研究生 25
© Copyright 2026 Paperzz