車の衝突時の客室回転による乗員挙動への影響*
陳 一唯 1)
水野 幸治 2)
伊藤 大輔 3)
細川 成之 4)
韓 勇 5)
Effect of Rotation of Passenger Compartment on Occupant Behavior in Vehicle Impacts
Yiwei Chen
Koji Mizuno
Daisuke Ito
Naruyuki Hosokawa
Yong Han
The objective of this study is to understand the effects of car rotation on occupant kinematic behavior in vehicle impact
with rotation. The method to provide the boundary condition for the occupants under car acceleration and rotation was
formulated. Small overlap frontal crash (yawing), full-width crash (pitching) and offset impact tests (yawing and pitching)
were examined by FE model simulations. The vehicle yaw motions had a small effect on the occupant kinematics. The
vehicle pitch motions mitigated the loading on occupants in a frontal crash since the anchor of the seatbelt moved with
vehicle pitch rotation, which increased ridedown of the occupant.
KEY WORDS: Safety, Occupant protection, Vehicle rotation, Finite element method (C1)
1.は じ め に
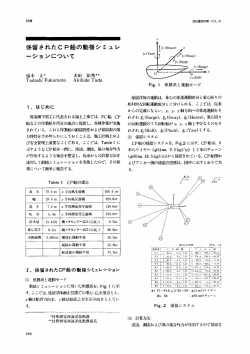
する運動座標系 O–x′y′z′を考える(図 1).点 P の O–xyz 系に
車の衝突においては,車両運動は並進だけではなく,回転も
よる位置ベクトルの成分表示を {r} = ( x, y , z ) T , O–x′y′z′ 系に
ともなう場合が多い.特に衝突力の作用点と車両重心の位置
よる成分表示を {r′} = ( x′, y′, z′)T とする.列ベクトルの時間微
関係,衝突力のモーメントと車両の慣性モーメントの関係か
分は各成分の微分である {r′} = ( x′, y ′, z′)T , {r′} = ( x′, y′, z′)T を
意味する.
ら,車両の回転角が大きくなる場合がある.たとえば,スモー
ルオーバーラップ衝突のような,車両の回転運動が大きい場
z
合,車両の回転運動は,車両の並進加速度と同様に乗員挙動に
も影響を及ぼすことが指摘されている(1).この場合,試験法
P(x, y, z)
P(x′,y′, z′)
z′
r
FMVSS 201 で想定されるような頭部が客室内装と接触するリ
スクが高まる(2).乗員保護のためには車両回転の影響を明確化
シミュレーションでの車両回転による乗員運動の再現方法の
Fig.1 Coordinate system
及びピッチ回転によるダミーの傷害値への影響を有限要素解
による乗員挙動への影響についての系統的な研究は少ない.
そこで,本研究では,車両回転による乗員挙動の影響を明確化
するため,まず,客室回転による乗員挙動の再現条件を定式化
した.また,ヨー回転,ピッチ回転による乗員の挙動に及ぼす
影響も比較した.
2.客室回転による乗員挙動の再現条件
原点 O を共有する静止座標系 O–xyz と,O のまわりに回転を
*2015 年 5 月 27 日受理.2015 年 5 月 22 日自動車技術会春季
学術講演会において発表.
1)名古屋大学大学院 (464-8603 名古屋市千種区不老町)
2)・3)名古屋大学 (同上)
4) (独)交通安全環境研究所(182-0012 東京都調布市深大寺
東町 7-42-27)
5) 廈門理工学院 (361024 中国廈門市集美区理工路 600 号)
y
x
確立も重要な課題である.Woitsch と Sinz(3) は車両のヨー回転
のメカニズムについては論じていない.このように,車両回転
x′
O
する必要がある.また,客室のみをモデル化するスレッド試験,
析によって検討しているが,車両回転による乗員挙動の変化
y′
両座標系による成分は回転の座標変換行列 [R] によって
{r} = [ R]{r ′}
(1)
と変換される. [R] は直交行列であり
[ R][ R]T = [ R]T [ R] = [ I ]
−1
(2)
T
[ R] = [R]
(3)
を満たす.静止座標系 O–xyz で表される列ベクトルに [R]T を
かけることで運動座標系に投影した列ベクトルが得られる.
{r ′} = [ R]T {r}
(4)
式(1)の時間微分 {r} = [ R ]{r ′} + [ R ]{r ′} に式(2)および式
(4)を代入することで,速度について
{r} = [ R ] ([ R ]T {r}) + [ R ]{r′}
(5)
T
の関係が得られる.上の式に左から[R ] をかけて,速度ベク
トルを運動座標系 O–x′y′z′ の成分で表示すると
[ R ]T {r} = [ R ]T [ R ] ([ R ]T {r}) + {r′}
T
[ R ] {r} = [Ω ] ([ R ]T {r}) + {r ′}
(6)
(7)
となる.ただし,[ R]T [ R ] = [Ω] は角速度マトリックスである.
式(5)および式(7)は質点の速度ベクトル r = v ′ + ω × r ′ (v′:運
動座標系から見た速度ベクトル)をそれぞれ静止座標系,運動
座標系の成分で表示したものである.
式(5)を時間微分して,点 P の加速度を求めると
][ R]T {r} + [ R ][ R ]T {r}
{r} = [ R
(8)
+ [ R ][ R]T {r} + [ R ]{r′} + [ R]{r′}
となる.上式に式(5)を再び代入して,O– x′y′z′系に投影した成
分を見るために左から [R]T をかけると
][ R]T + [ R ]T [ R ][ R ]T ){r}
[ R]T {r} = ([ R]T [ R
(9)
+ [Ω]2 [ R]T {r} + 2[Ω]{r′} + {r′}
となる.一方, [Ω] = [ R]T [ R ] について
O–xyz 系から見た運動方程式は
m{r} = { f } + m{g}
(20)
となる.運動方程式の運動座標系の向きに投影した成分
をとると
m([ R]T {r}) = { f ′} + m[ R]T {g}
(21)
となり,これに式 (17)を代入すると最終的に
m{r′} = { f ′} + m [ R ]T {g} − m [ R ]T {rO′ }
]{r ′} − m[Ω 2 ]{r ′} − 2 m [Ω]{r′}
− m[Ω
(22)
が得られる.
O′–x′y′z′系の運動方程式(式(21))をスレッドなど別の
系で再現するためには,質点に作用する外力の成分が等
しくなければならないが,重力の向きがつねに鉛直下向
] = [ R ]T [ R ] + [ R]T [ R
]
[Ω
][R]T + [ R ]T [ R ][R]T = [Ω
][R]T
[ R]T [ R
が成り立つ.上の式を用いて式(9)を書き直すと
(10)
きである.客室の姿勢角(ヨー,ピッチ,ロール)を一
(11)
致させ,客室に対する重力の方向を一致させることで,
]([ R ]T {r}) + [Ω ]2 ([ R ]T {r})
[ R ] {r} = [Ω
+ 2 [Ω ]{r′} + {r′}
]{r ′} + [Ω ]2 {r ′} + 2 [Ω ]{r′} + {r′}
= [Ω
(12)
トータルの外力が一致する.したがって,静止座標系と
T
O′系の座標軸のなす角度の時刻歴も一致しなければなら
に対する加速度を一致させる必要があるため,静止座標
となる.上の式は
r = a′ + 2ω × v′ + ω × (ω × r ′) + ω × r ′
(13)
の成分による表示であり,左から [R]T をかけることに
よって,点 P の加速度を運動座標系( O–x′y′z′系)の成分
に投影している.
つぎに座標系 O′–x′y′z′ の原点 O′ が O–xyz 系に対して
ある加速度で移動しつつ,座標軸が回転している場合を
考える(図 2).O′–x′y′z′系の点 P の位置は,原点 O′の並
進運動と O′ 系の回転運動の重ね合わせで表現できる.
(14)
{r } = {rO ′ } + [ R ]{r ′}
運動座標系( O′–x′y′z′系)の座標系に投影した位置,速度,
加速度の成分は次のようになる.
(15)
[ R ]T {r} = [ R ]T {rO′} + {r ′}
[ R ]T {r} = [ R ]T {rO′ } + [Ω ] {r ′} + {r ′}
(16)
]{r ′}
[ R]T {r} = [ R]T {rO′} + [Ω
(17)
+ [Ω]2{r ′} + 2[Ω]{r′} + {r′}
ない.乗員の挙動を再現するためには客室の静止座標系
系に対する O′ 系の原点の加速度も一致している必要が
ある.
上記の議論から,衝突時に客室の回転をともなう場合につ
いて,客室内の乗員運動をスレッド試験で再現するためには,
つぎの条件を満足させなければならないと分かる.
1.
客室内のダミーに加わる力の環境(拘束装置,シート,イ
ンストルメントパネル,フロア等)を一致させる.
2.
客室の任意点での加速度を,衝突試験における客室の同
じ点の加速度(3 方向,静止座標系か運動座標系のどちら
の表示でもよい)と一致させる.
3.
衝突試験での静止座標系に対する客室の姿勢(角度)を
一致させる.
客室の回転中心や重心を意識する必要はなく,加速度を計測
した点の並進加速度を与え,その点のまわりの回転角を時系
上の式は
r = rO′ + a′ + 2ω × v′ + ω × (ω × r ′) + ω × r ′
(18)
の成分表示である.
列で与えればよい.
3.ヨー回転の影響
z
z′
P(x, y, z)
P(x′,y′, z′,)
r′ y′
x′
O′
O
y
x
Fig.2 Coordinate system (origin moves)
3.1. ヨー回転による客室加速度
衝突時に車両が回転する場合,客室における任意の点での
加速度はその位置によって異なる.本節では,ヨー回転による
客室内の加速度分布を検証した.ヨー回転角が大きい小型車
の小ラップ前面衝突試験のデータを解析データとして選択し
た.試験の衝突形態を図 3 に示す.試験は IIHS(Insurance
Institute for Highway Safety)
によるもので,
衝突速度は 64.4 km/h,
ラップ率は 25%である.加速度計が客室のフロアに取り付け
られており,その位置は車両のルーフ上に貼付されたターゲ
つぎに質点 P の運動方程式についてみていく.P には
運動座標系での位置に応じてはたらく力
(19)
{ f ′} = [ R]T { f }
が作用するものとする.また,P には重力
m{g} = m (0 0 − g ) T が鉛直下向きにはたらくものとする.
ットマークにて示されている.実験では Hybrid III AM50th ダ
ミーを運転席に着座させている.
a x′ = a Ox′ − ω ry′ − ω 2 rx′
(24)
a y′ = a Oy′ + ω rx′ − ω 2 ry′
FE 解析の結果をみると(図 6),客室の各点の加速度は上
の式にしたがっていることがわかる.衝突によって,客室に大
きな加速度が加える時間域 50~100 ms の間は,ω の影響が大
Fig.3 Crash configuration of Small overlap test
きく,ry′ が異なる P3, P6, P9 と P11-P13 の間では加速度の
試験結果による x′方向(車両前後方向;「'」は運動座標系
である車両固定座標系を表す)と y′ 方向(左右方向)の並進
加速度を図 4(a) に示す.ただし,本解析は右ハンドル車での
衝突を想定しており,y′方向の加速度を正負反転している.客
室のヨー回転角については,衝突試験の映像から画像解析に
よって得た(図 4(b)).
解析に使用した衝突では,約 100 ms まではほとんど回転が
大きさに違いがみられる.100 ms 以降は ω2 の値が大きくな
り,P3, P6, P9 や P11-P13 のそれぞれの点では rx′ が異なる
ので,遠心力が関連した項である rx′ ·ω2 によって,P3, P6, P9
や P11-P13 内でも加速度に分布が生じている.ただし,今回
は画像解析で得た角度の時刻歴を与えており,その二回微分
をすると時刻0で大きな角加速度となったため,その影響で
時刻 0 近傍において加速度の値が0になっていない.
発生せず車体前端部が進行方向に変形し続けたので,x′方向の
転角は,車体の変形によるものである.その後,車両は反発と
100
0.4
0
0.3
-200
x′x
y′y
-300
-400
0
50
100
150
Time (ms)
(a) Acceleration of accelerometer
-100
-200
P3,6,9
P11,12,13
-300
-400
0.2
0
50
100
150
Time (ms)
0.1
(a) x′ acceleration
0
100
-0.1
0
50
100 150
Time (ms)
200
(b) Yaw rotation
Fig.4 Input data for simulations of small overlap crash test
衝突試験の結果にもとづき,有限要素(FE)による客室モ
デルに,衝突試験において加速度計が取り付けられた位置の
並進加速度とそのまわりのヨー回転角を与えた.客室 FE モデ
ルのいくつかの点の加速度を求めることによって,ヨー回転
による客室加速度への影響を調べた.図 5 に加速度の計測点
(P1–P13)の位置,図 6 に得られた加速度を示す.
Acceleration (m/s2)
-100
Angle (rad)
Acceleration (m/s2)
なり正の方向にヨー回転しながらバリアから分離した.
Acceleration (m/s2)
加速度が高い値となった.この時刻までの負(時計回り)の回
0
0
-100
P3,11
P6,12
P9,13
-200
0
50
100
150
Time (ms)
(b) y′ acceleration
Fig.6 Accelerations of points in the compartment
式(22)の加速度は,客室内のある一点の加速度が与えられた
ときの客室内の加速度場を表現する.このことから,たとえば
ヨー回転によって発生する衝突試験を再現する場合,乗員の
着座位置に応じて,式(23)を用いて加速度を計算して,並進加
速度としてスレッドに与える必要がある.
3.2. 小ラップ前面衝突の乗員挙動
小ラップ前面衝突試験の加速度場を FE 解析で再現し,ヨー
回転による前席乗員への影響を検討した.前節の衝突試験を
解析条件とし,試験で得られた加速度および画像解析より求
めた角度変化をモデルに入力した.客室モデルは前席用シー
ト,ステアリング,シートベルトとエアバッグからなる(4).
Fig.5 Locations of acceleration measured
客室における任意の点の加速度は v′=0 を式(18)に代入する
ことによって得ることができる.
r = rO′ + ω × (ω × r ′) + ω × r ′
(23)
ヨー角速度を ω として,上の式を x′,y′方向の成分で表すと
つぎのようになる.
Hybrid III または人体有限要素モデル THUMS(AM50)を運転
席に着座させた.ただし,Hybrid III ダミーでは挙動に差が見
られなかったため,ここでは人体モデルについて論じる.
乗員挙動とヨー回転との関係を明らかにするため,ヨー回
転ありとヨー回転なしの二つの場合を比較した.3.1 節の結果
から,ヨー回転なしの場合に客室に与える加速度は,ヨー回転
人体モデルに対するアンカーの位置が変化することで,体
ありの場合の運転席座席下の加速度を並進加速度で与えた.
幹に作用するショルダーベルト張力の方向も変わる.しかし,
ヨー回転ありの場合は,これに加えて客室の姿勢角の時間変
シートベルトの向きは人体の運動に応じて変化することから,
化も与えた.なお,本解析では計算の安定化のため,上肢と客
シートベルト張力は常に乗員の動く方向と反対の向きにはた
室内の接触は定義していない.
らく.また,小ラップ前面衝突試験では,ショルダーベルトか
人体モデルの挙動は,ヨー回転ありの場合は,なしの場合に
ら乗員体幹に力が作用する間の,車両のヨー回転角はまだ小
比べて(t = 200 ms),乗員頭部の横方向移動量がやや大きい
さく(150 ms の時,ヨー角はおよそ 8°),アンカーの移動量
(図 7).ショルダーベルトアウターとインナーの張力を
が少ないこともあり,車体のヨー回転が乗員挙動に大きな影
Tsb outer, Tsb inner とし(図 8),Ty′outer と Ty′ inner はショルダーベル
響は及ぼさなかったと考えられる.ベルトの乗員の肩部に掛
ト張力を y′方向(車両固定座標系)に投影したものとする.図
かる位置は,乗員拘束に大きな影響を及ぼすが(ベルトの肩か
9 より,Ty′ inner − Ty′ outer(乗員の体幹を室内に保持する力)は,
らの外れやベルトと頚部との接触等),今回の解析では車両回
ヨー回転が与えられた場合の方が大きい.その要因として,シ
転の入力の有無で,ショルダーベルトの肩部での位置は変わ
ートベルトアンカーの位置が客室のヨー回転によって移動し
らなかった.したがって,モデルに車両回転の入力がなくても
たことがあげられる(図 10).アンカーが時計回りに移動する
車両の並進加速度が入力されていれば,ベルトと乗員の接触
ことで,Tsb outer の方向を変え,その有効成分 Ty′ outer (with yaw)
位置は大きく変化しないと考えられる.
が Ty′ outer (without yaw)よりも小さくなる.
以上のことから,供試車に関する分析については小ラップ
前面衝突試験をスレッドで再現する場合は,乗員の座席位置
t =200 ms
t =200 ms
での並進加速度をスレッドに与える必要はあるが,その点の
まわりに角加速度を与える必要性は大きくはないと思われる.
4.ピッチ回転の影響
4.1. フルラップ前面衝突試験
(a) With yaw rotation
(b) Without yaw rotation
Fig.7 Maximal head lateral displacement of THUMS model
ピッチ回転による乗員挙動への影響を明らかにするため,
フルラップ前面衝突実験においてピッチ回転角が大きかった
軽自動車の試験結果を用いた.衝突速度は 55.6 km/h であ
Ty′ outer Tshoulder belt outer
る.Hybrid III AM50th ダミーを右後席に着座させた.実験で
は複数の加速度計を車両に取り付けている(図 11).
Ty′inner
Tshoulder belt
Fig.8 Shoulder belt force components
Ty
(with
yaw)
Ty′outer
yaw)
outer (with
Ty
(with
yaw)
yaw)
Ty′inner
inner (with
Ty
outer
(without
yaw)
Ty′ outer (without yaw)
Ty
(without
yaw)
Ty′inner
(without
yaw)
inner
2.5
Force (kN)
2
1.5
1
Fig.11 Location of accelerometers
0.5
0
0
50
100
Time (ms)
150
Figure 9. Shoulder belt tension in y direction
② 130 ms, yaw rot. 5°
③ 170 ms, yaw rot. 12°
200
4.2. フルラップ前面衝突試験の再現と乗員挙動
フルラップ前面衝突試験の客室運動を有限要素解析により
再現した.簡単化された車両後席の FE モデルを用いた.後席
モデルは後席シートとフロアからなる.Hybrid III AM50th の
FE モデル(Humanetics, ver. 8.0)をシートに着座させ,3 点式
シートベルトを着用させた.前後と上下加速度を計測した左
のサイドシルに取り付けた加速度計の値を用いて解析をおこ
① 70 ms, yaw rot. -2°
なった.x′ 軸方向加速度の最大値は 700 m/s2 であった.時刻
150 ms における車体ピッチ回転角はおよそ 0.175 rad(10°)と
Fig.10 Track of belt anchor (with yaw)
なっている(図 12).
0
0
-0.05
-200
Angle (rad)
Acceleration (m/s2)
200
x′
x
z′z
-400
-600
ともに,前方に移動する.このことによりベルト張力の増加が
抑えられたと考えられる.
ピッチ回転により,客室内の車両前後方向速度は z′座標(車
-0.1
-0.15
両上方向を正の向きとする)によって変わる.客室内のある一
-0.2
-800
0
50
100
0
150
50
Time (ms)
100
150
Time (ms)
(a) Acceleration of rear sidesill (left-hand)
点からみると,z′の座標値が大きいほど,その点の x′方向速度
が相対的に大きくなる.衝突開始後,乗員が拘束装置と接触し
(b) Pitch rotation
つつ,アンカーとともに前方向に移動する.アンカー位置の車
Fig.12 Input data for full-width rigid barrier crash simulations
乗員挙動と車両ピッチ回転との関係を明らかにするため,
ピッチ回転有無による乗員応答を比較した.ただし,ピッチ回
両前方変位を図 16 に示す.ピッチ回転ありの場合,アンカー
ポイントの位置がピッチなしの場合より,前方移動量が
転なしの場合には式(22)にしたがい,座席下の前後と上下方向
70 mm 大きい.アンカーが乗員の着座位置よりも前に移動し
加速度のみを与えた.
た分だけ乗員の胸部負荷が緩和されるので,シートベルト荷
ダミーモデルの挙動(t = 75 ms)を図 13 に示す.ピッチ回
重のピークが小さくなり,その発生時刻もピッチ回転なしの
転がある場合には,ダミーの体幹や頚部の屈曲が小さく,客室
ときより遅れる.これをライドダウンから考えると,車体変形
から見たダミーの前方移動量もピッチ回転なしの場合よりも
による車両前方変位に加え,ピッチ回転の角加速度によって,
小さい.
見かけ上,車両変位が増加するために,静止座標系から見た乗
62°
員移動量が大きくなるので,乗員への負荷の減少につながっ
87°
たと思われる.
(a) With pitch rotation
(b) Without pitch rotation
Fig.13 Kinematic behavior of dummy model with and without
vehicle pitching
ショルダーベルト張力を図 14(a)に比較する.ショルダーベ
ルト張力は約 60 ms において最大値になる.ピッチ回転を与
Fig.15 The seatbelt anchor movement during vehicle pitching
motion
えた場合では張力の最大値が 12.8 kN,ピッチ回転がない場合
Displacement (m)
では,最大値 13.8 kN となり,ピッチ回転によって 1 kN 減少
する.胸部加速度については(図 14(b)),ショルダーベルト
張力と同様に,ピッチ回転ありの場合では胸部加速度が減少
した.このように,車体のピッチ回転により,ショルダーベル
ト張力が減少し,乗員に加わる負荷も低減していることが示
0.6
70 mm
0.4
Without pitch
0
0
唆される.
Acceleration (m/s2)
Force (kN)
20
40
60
80
100
120
Time (ms)
15
10
5
0
0
With pitch
0.2
50
100
Time (ms)
(a) Shoulder belt force
1200
Fig.16 Displacement of shoulder belt anchor point in global x
coordinate system with and without vehicle pitching
Without pitch
With pitch
800
つぎにピッチ回転の有無について,ライドダウンエネルギ
400
ー及びライドダウン効率を比較した.乗員の前方変位を x,
0
0
20
40
60
80
100
Time (ms)
(b) Chest acceleration
Fig.14 Shoulder belt force and chest acceleration with and without
vehicle pitching
ショルダーベルト張力と胸部加速度が低減する原因はシー
トベルトアンカーの移動で説明することができる.図 15 に示
すように,ショルダーベルトアンカーが車両のピッチ回転と
車両前方変位を X とすると,単位質量あたりのライドダウン
エネルギー erd は次のように与えられる(5).
erd = −
x dX
(24)
乗員の加速度は胸部の x 方向加速度,車両変位はショルダー
アンカーの x 方向変位をとり,ともに静止座標系による表示
である.単位質量あたりの乗員の運動エネルギー v2/2,拘束装
置の変形エネルギー ers ,ライドダウンエネルギー erd につい
両が路面に接地した際に生じる衝撃については考慮していな
2
て,
時刻歴を図17 に示す.
エネルギーの合計は一定
(= V0 / 2 )
い.ピッチ回転が大きい場合には,乗員も客室内で上方へ飛び
である.ピッチ回転ありの場合は,ライドダウンエネルギーが
大きく,単位質量あたりの拘束装置の吸収するエネルギー ers
2
は小さい.ライドダウン効率 μ( = erd, max /(V0 / 2) )は,ピッチ
上がる挙動となるため,その後,着地にともない,シートから
後席乗員の脊椎に大きな圧縮力が発生する可能性が考えられ
る.
120
6.結 論
本研究では,Hybrid III モデルと人体有限要素モデルを用
120
Specific energy (m2/s2)
Specific energy (m2/s2)
回転ありの場合は 34.7%,なしの場合は 15.9%となった.
80
40
0
0
10 20 30 40 50 60 70
いた有限要素解析を行い,前面衝突について車両の回転運動
v2/2
ers
erd
Total
80
40
が乗員に及ぼす影響とその発生要因について調べた.
1.
員のまわりの境界条件を再現するとともに,客室のあ
0
0
10
Time (ms)
(a) With pitch rotation
20
車両回転による乗員挙動の再現条件を定式化した.乗
30
40
Time (ms)
50
る点にその点の衝突時の並進加速度と客室の姿勢(角
60
(b) Without pitch rotation
Fig.17 Specific energy of occupant
5.考 察
車両の回転によって,客室内の並進加速度は着座位置によ
って異なる.これらの加速度は客室の剛体運動から計算され,
着座している乗員の座席位置などに与える必要がある.これ
度)を与える必要がある.
2.
小ラップ前面衝突試験では,車両のヨー回転は乗員の
挙動に大きな影響を及ぼさなかった.
3.
車両のピッチ回転により,ダミーに対するアンカー位
置が前方変位することで,ライドダウン効率が向上
し,ショルダーベルトから乗員胸部に作用する荷重が
緩和された.
に対して,乗員の座席位置の並進加速度を与えたとしても,車
参 考 文 献
両回転によって客室の姿勢角が変わるので,例えば,シートベ
ルトアンカーの変位,速度,加速度は,座席位置での値とは異
なる.本研究では回転にともない発生する,これらの加速度分
布の乗員挙動への影響について調べた.
小ラップ前面衝突の解析によりヨー回転の影響を調べたと
ころ,Hybrid III ダミーでは,ダミーの上下軸まわりのねじり
剛性が人体より高いことから,THUMS でみられた身体のねじ
れ挙動はあまり見られなかった.車両のヨー回転はシートベ
ルトから乗員に加わる力の方向が,乗員の運動にしたがいそ
の向きが変わるので,乗員の運動に及ぼす影響は小さい.また,
ヨー回転にともない乗員のショルダーベルトが肩から外れる
向きに力がはたらいたり,あるいは頚部と干渉する場合があ
るが,これらはヨー回転にともなう並進加速度のみを与えた
場合と,客室の姿勢角も与えた場合を比較すると,両者にはほ
(1) Frank A. Pintar, Narayan Yoganandan, Dennis J. Maiman,
Injury Mechanisms and Severity in Narrow Offset Frontal
Impacts, Annals of advances in automotive medicine, Vol.52,
p.185-189 (2008)
(2) US Department of Transport National Highway Traffic Safety
Administration: Laboratory Test Procedure for FMVSS 201U, Report
TP201U-01 (1998)
(3) Gernot Woitsch and Wolfgang Sinz: Influence of pitching and
yawing during frontal passenger vehicle crash tests on driver
occupant's kinematics and injury, International Journal of
Crashworthiness, Vol.18, Issue 4, p.356–370 (2013)
(4) 岩中泰樹ら:自動車前面衝突における乗員の胸部傷害指
とんど差が見られなかった.すなわち,乗員挙動に影響を大き
標の検討,自動車技術会論文集,Vol.46, No.4,p.793-798
く及ぼすのはヨー姿勢角ではなく,横方向の並進加速度であ
(2015)
るため,ヨー姿勢角を与える与えないに関わらず,乗員運動は
(5) 水野幸治:自動車の衝突安全,名古屋,名古屋大学出版会,
変わらなかった.ただし,今回の解析では前腕とインストルメ
2012,309p.
ントパネル,ステアリングとの接触を無視しており,これが乗
員挙動に影響を及ぼす可能性がある.
一方,車両のピッチ回転によってショルダーベルト張力が
減少し,胸部にかかる負荷を低減する.このことは,車両のピ
ッチ運動を制御することによって,乗員に加わる負荷を低減
することができることを意味する.しかし,本研究では,車両
のピッチ角が最大となる時刻までを解析対象としており,車
© Copyright 2026 Paperzz