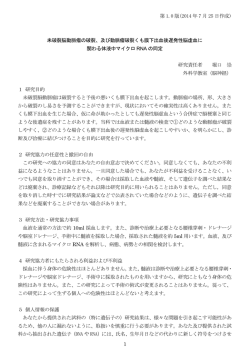
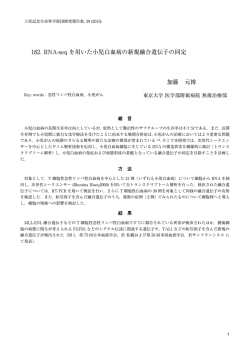
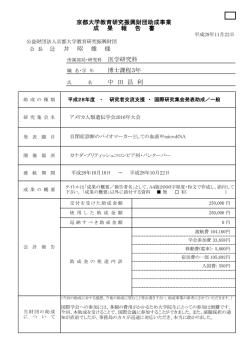
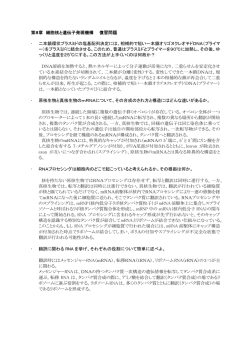
重点研究テーマ RNA 干渉法と遺伝子導入法による昆虫の形態形成メカニズムの解明 (研) ライフシステム部門・生命機能工学大講座 (教) 環境創生工学専攻・生命テクノサイエンスコース・生物反応工学講座 (学) 生物工学科・生物反応工学講座 教授 野地澄晴、准教授 大内淑代、助教 三戸太郎 野地澄晴 Tel:088-656-7528 Fax:088-656-9074 E-mail:[email protected] RNA 干渉を利用した脚再生メカニズムの解明 コオロギなどの不完全変態昆虫の幼虫の脚は切断しても、完 全に再生する。そこで、再生のメカニズムを解明する目的で、 脚再生の分子メカニズムを RNA 干渉を利用して研究している。 われわれは、コオロギの脚再生の系で、脚再生の時にのみ RNA 干渉が生じる現象を発見し、再生依存的 RNAi と名づけた。例 えば、Fat の再生依存的 RNAi では、2本鎖 RNA をインジェク ション後に脚を切断する(右図1a)と、再生脚が短くなること を発見した(右図1b、1c) 。さらに様々なシグナル経路の因子 について、この方法を用いて機能を解析し、新規なシグナル経 路である Fat/Dachsous signaling と the warts-hippo pathway が脚の 形態の再生に関与していることを見つけた(板東ら、Development、 2009) 。 トランスジェニックコオロギの作製法とその応用 コオロギに外来の遺伝子を導入し、トランスジェニックコオ ロギを作製することに成功した。右図上の写真は、全身にオワ ンクラゲの緑色蛍光タンパク質(GFP)を発現しているコオロ ギである。この方法を用いると、ヒトの遺伝子をコオロギで発 現することが可能になり、ヒトの単純な疾患モデル動物を作製 することができる。また、GFP を発現した細胞の動きを調べる ことが可能となり、特に細胞の移動や運動を解析することが可 能になった(中村ら、論文投稿中、2010)。 13
© Copyright 2026 Paperzz