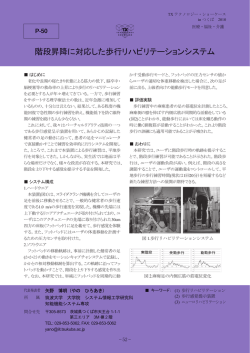
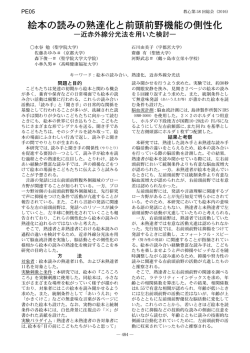
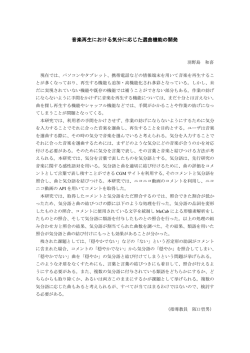
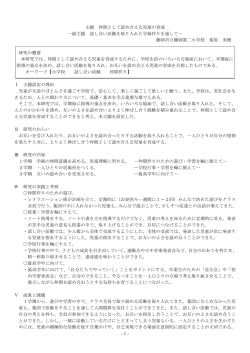
年次活動報告書 2013 テレイグジスタンスでイルカと遊ぶ,クジラを知る 顔写真 山形大学大学院理工学研究科 教授 妻木勇一 I. 序論 Anchor Driver IIIやIVがある[1]. これらのロボットは, ワイヤ張力を利用することで安定化とワイヤの絡まりを 防いでいる.また,ワイヤ張力は,水中ロボットの推進 機により発生させる方法を取っている.このように,高 速移動を実現するために,ワイヤ張力を利用した水中ロ ボットは存在しない.一方,テレイグジスタンスシステ ムは,地上用として様々なシステムが研究・開発されて いるが,本研究で開発するようなイルカと一緒に泳ぐ体 験が可能なテレイグジスタンスシステムは存在しない. 本研究では,提案システムの要となる牽引型水中ロボ ットのプロトタイプを設計・開発し,基本システムの検 証を行った. 本研究の目的は,テレイグジスタンス技術を用いて, イルカやクジラと一緒に泳ぐ体験を実現するためのシス テムを開発することである.このような技術は『イルカ やくじらと一緒に泳いでみたい』という誰もが抱いたこ とのある夢を実現できる.新しい「遊び」を実現するシ ステムとも言えよう.もちろん,それだけではなく,生 物に容易に近づける本システムは,イルカやクジラの生 態を知りたいというサイエンスにも大きく貢献できる. 特に,近年バイオロギングという,カメラを動物に取り 付けることでその生態を明らかにする手法が注目されて いる.これに準じる方法としての活用も考えられる.ま た,イルカセラピーと呼ばれるイルカ介在療法への応用 も期待できよう. そこで,本研究では,牽引型の水中ロボットを使用し た水中テレイグジスタンスシステムを開発する.母船と 水中ロボットがワイヤでつながっているものは,ROV (Remote Operated Vehicle) と呼ばれる遠隔操作型があ る.しかし,ワイヤは通信を行うためであり,ワイヤ張 力を積極的に使用するものではない.一方,ワイヤ張力 を利用するロボットとして,広瀬らが開発している II. 水中テレイグジスタンスシステム 本論文で提案する水中テレイグジスタンスシステムの 概念図を図1に示す.牽引型の水中ロボットのカメラを 通して,遠隔地に居る操作者があたかも水中でイルカや クジラと一緒に泳いでいるかのような感覚を提示できる システムである.衛星回線を使うことで地球規模のシス テムも構築可能である.なお,本研究では,図1に示す システムの前段階として,船上の操作者へのテレイグジ スタンスを目指す. III. 牽引型水中ロボットの設計 水中テレイグジスタンスシステムを実現するため,牽 引型水中ロボットを設計した.以下に設計仕様を示す. 図1 水中テレイグジスタンス構想図 -1- 水深6 m まで潜水可能であること 牽引型であること 遠隔操作可能な2 自由度のカメラジンバルを備え, 操作者の頭部運動と連動できること 1080p で 30 フレームの映像を船上に有線 LAN により送信可能なこと 遠隔操作により,ロボット本体が上下,左右の 2 自由度の運動が可能なこと 電源を内蔵し30 分以上運用可能なこと 年次活動報告書 2013 図2 牽引型水中ロボット概観 図4 システム図 図3 後方外観 図5 プロトタイプ外観 は,アクリル樹脂を使用した.船首部と舵は 3D プリン タを利用し,ABS 樹脂で製作した.サーボモータの動作 実験を行い,駆動できることを検証した.また,カメラ から取得した映像のEthernet による通信も実証した. 今後,水中における動作実験を行う.その後,実地試 験を行い,本システムの有効性を検証する予定である. 上述の設計仕様を満足するように,プロトタイプを設 計した.設計した概観を図2に示す.全長522 mm の水 中ロボットとなった.図右側の本体にアンカーボルトが 固定されており,これを船上からロープで牽引する.ま た,図3に示すように,カメラは船尾に設置されており, 2 自由度のジンバル機構を有している. 後方には二組の舵 が設置されており,上下,左右の運動が可能となってい る.舵部の軸にはスタンチューブを用いることで,船内 への浸水を防いでいる.ジンバル部と舵部にそれぞれ2 個のサーボモータが配置されている.サーボモータの制 御用CPU としてArduino UNO を採用した.また,上 位CPU として,Raspberry Pi と呼ばれるLinux を搭載 したシングルボードコンピュータを採用した. Raspberry Pi は,カメラ映像の取得,船上ノートPC とのEthernet 通信,制御用CPU との通信に使用される.また,専用の カメラモジュールのケーブルを延長することにより,2 軸ジンバルに対応できるようにした.1080p で30 フレー ムの取り込みが可能である.システム図を図4に示す. V. 結論 イルカやクジラと一緒に泳ぐ体験を実現するための水 中テレイグジスタンスシステムを提案し,牽引型水中ロ ボットのプロトタイプを設計・開発した.開発したプロ トタイプは,操作者の頭部運動に合わせて 2 軸のカメラ ジンバルが駆動することで,その場にいるような感覚を 提示するものである.基本動作の検証を行った. 参考文献 [1] Y. Huang, Y. Sasaki, E. F. Fukushima, S. Hirose, "Development of Anchor Diver III: Easy-to-operate Tether-type ROV for Underwater Search and Rescue Operations", 3rd Int. Conf. on Underwater System Technology, pp. 192-197, 2010 IV. プロトタイプ 実際に開発したプロトタイプを図5に示す.本体部に -2-
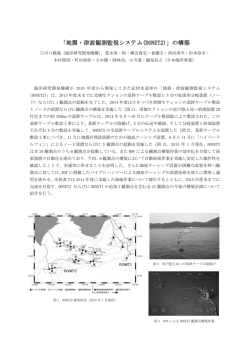
© Copyright 2026 Paperzz