CAT-1554
■寸法表早見出し■
TU シリーズ
TU シリーズ
42
高精密シリーズ
146
TU
72
TX
CTX
156
160
ロングストロークシリーズ
TSL…M
高剛性シリーズ
精
密
位
置
決
め
テ
ー
ブ
ル
TSLH…M
CTLH…M
108
クリーンテーブルシリーズ
121
126
TC
マイクロテーブルシリーズ
137
141
TM
コンパクトシリーズ
TS
CT
TU
194
ロングストロークシリーズ
202
204
TSL…M
高剛性シリーズ
TSLH…M
CTLH…M
高精密シリーズ
TX
CTX
162
177
クリーンテーブルシリーズ
TC
マイクロテーブルシリーズ
TM
コンパクトシリーズ
TS
CT
186
193
高速ロングストロークシリーズ
TSLB
高速ロングストロークシリーズ
206
TSLB
211
リニアモータテーブル LT
214
リニアモータテーブル LT…M
258
ナノリニア NT…V・NT
268
リニアモータテーブル LT
234
LT…M
267
NT…V
NT
281
289
リニアモータテーブル LT…M
LT…M
ナノリニア NT…V・NT
NT…V
NT
LT
精密ロータリテーブル
RT
精密アライメントテーブル
AT
292
アライメントステージ モジュール形
310
299
SA…M
AM
318
320
アライメントステージ ダイレクトドライブ形
324
302
307
SA…DE
331
電装システム
システム構成
テーブル形式とモータの組合せ一覧
ACサーボモータとドライバの組合せ一覧
354
356
370
使 用 実 例
使用実例
397
精密昇降テーブル
TZ
ピエゾステージ
SP
LT
338
精密ロータリテーブル
RT
342
精密アライメントテーブル
AT
344
351
テーブルと
コントローラの組合せ一覧
モータ・ドライバの仕様
プログラムコントローラの仕様
373
378
394
アライメントステージ モジュール形
SA…M
AM
アライメントステージ ダイレクトドライブ形
SA…DE
精密昇降テーブル
TZ
ピエゾステージ
SP
電装システム
使用実例
1
目 次
総合解説
電装システム
6
精密位置決めテーブルの形式と分類
精密位置決めテーブルのシステム構成
12
精密位置決めテーブルの選定
354
システム構成
テーブル形式とモータの組合せ一覧
14
AC サーボモータ
356
精度
22
ステッピングモータ
364
搭載質量・負荷荷重
24
AC サーボモータとドライバの組合せ一覧
最高速度と分解能
25
テーブルと
運転パターンの検討
26
センサ仕様
取付け
使用上の注意
39
コントローラの組合せ一覧
AC サーボモータ
373
36
ステッピングモータ
376
38
モータ・ドライバの仕様
378
精密位置決めテーブル形式別解説
プログラムコントローラの仕様
394
使用実例
42
精密位置決めテーブル TU
《TU シリーズ》
TU
精密位置決めテーブル L
《ロングストロークシリーズ》
TSL…M
108
精密位置決めテーブル LH
《高剛性シリーズ》
TSLH…M・CTLH…M
126
高精密位置決めテーブル TX
《高精密シリーズ》
TX・CTX
146
クリーン精密位置決めテーブル TC 《クリーンテーブルシリーズ》
TC
162
マイクロ精密位置決めテーブル TM《マイクロテーブルシリーズ》
TM
186
TS・CT
194
精密位置決めテーブル
《コンパクトシリーズ》
精密位置決めテーブル LB
《高速ロングストロークシリーズ》TSLB
397
直動シリーズの紹介
408
テクニカルサービスサイトの紹介
410
206
リニアモータテーブル LT
LT
214
リニアモータテーブル LT…M
LT…M
258
ナノリニア NT…V・NT
NT…V・NT
268
精密ロータリテーブル
RT
292
精密アライメントテーブル
AT
302
アライメントステージ モジュール形
SA…M・AM
310
アライメントステージ ダイレクトドライブ形
SA…DE
324
精密昇降テーブル
TZ
338
ピエゾステージ
SP
344
2
370
3
総合解説
MECHATRONICS SERIES
精密位置決めテーブルは、長年
にわたって培ってきた直動案内機器の技
術と、最先端のマイクロエレクトロニクス
技術の融合によって生まれた製品です。
精密位置決めテーブルは、厳し
い要求に応えるために、厳選された多数
の優れた部品で構成されています。中で
もテーブルの案内部には、超精密機械や
工作機械の分野で実績のある
直動
案内機器が組み込まれており、その優れ
た性能を余すところなく発揮しています。
精密位置決めテーブルは、各種
の測定器、加工機、組立機を始め、最先
端の液晶・半導体製造設備などの高性能
な位置決め機構として幅広く使用され、
その優れた性能が実証されています。
4
5
精密位置決めテーブルの形式と分類
精密位置決めテーブルは、スライドテーブルの送り機構や特性、使用用途によって、下表のように
分類することができます。豊富なシリーズから、用途に合わせて最適な位置決めテーブルを選択することが
できます。
送り機構
ボールねじ駆動
形状
シリーズ
単軸仕様の形式
多軸仕様の形式
参照ページ
TU シリーズ
TU
ー
42 ページ
ロングストロークシリーズ
TSL…M
ー
108 ページ
高剛性シリーズ
TSLH…M
CTLH…M
126 ページ
高精密シリーズ
TX
CTX
146 ページ
クリーンテーブルシリーズ
TC
ー
162 ページ
マイクロテーブルシリーズ
TM
ー
186 ページ
コンパクトシリーズ
TS
CT
194 ページ
高速ロングストロークシリーズ
TSLB
ー
206 ページ
リニアモータテーブル LT
LT
ー
214 ページ
リニアモータテーブル LT…M
LT…M
ー
258 ページ
ナノリニア NT…V・NT
NT…V・NT
ー
268 ページ
精密
位置決めテーブル
タイミングベルト
駆動
リニアモータ駆動
精密
ロータリテーブル
DD モータ駆動
精密ロータリテーブル
RT
ー
292 ページ
精密
アライメントテーブル
ボールねじ駆動
精密アライメントテーブル
AT
ー
302 ページ
ボールねじ駆動
アライメントステージ モジュール形
SA…M・AM
ー
310 ページ
アライメントステージ ダイレクトドライブ形
SA…DE
ー
324 ページ
精密昇降テーブル
TZ
ー
338 ページ
ピエゾステージ
SP
ー
344 ページ
アライメントステージ
ダイレクトドライブ
精密
昇降テーブル
ピエゾステージ
6
ボールねじ駆動
ピエゾ素子
7
精密位置決めテーブルの主な形式と分類
TU シリーズ
ロングストロークシリーズ
クリーンテーブルシリーズ
マイクロテーブルシリーズ
●高剛性な U 字形トラックレールを採用
●幅広い分野で実績のあるスタンダードタイプ
●半導体・液晶関連製造装置など、高いクリーン度が
●研削ボールねじ駆動で、断面高さ20mm、幅17
●用途に合わせてテーブルの仕様が各種選択可能
●リニアウェイの並列使用で安定した特性
mm の極小サイズ
要求される環境下での使用に最適
●用途に応じ 3 種類のタイプから選択可能
TU
TSL…M
42 〜 107 ページ参照
108 〜 125 ページ参照
TC
162 〜 185 ページ参照
●追従性の優れた高い位置決め精度と優れた耐久性
TM
186 〜 193 ページ参照
高剛性シリーズ
高精密シリーズ
コンパクトシリーズ
高速ロングストロークシリーズ
●厳選された部品構成で信頼性が高く高精度
●リニアローラウェイスーパー X の使用で安定した
●断面高さが低くコンパクトな構造
●タイミングベルト駆動の高速タイプ
●クロスローラウェイの採用により信頼性が高く高精度
●リニアウェイの並列使用で安定した高い走行性能
●高剛性で大きな搭載質量
走行性能
●フルクローズドループ制御で高精度
TSLH…M・CTLH…M
126 〜 145 ページ参照
8
TX . CTX
146 〜 161 ページ参照
TS . CT
194 〜 205 ページ参照
TSLB
206 〜 213 ページ参照
9
精密位置決めテーブルの主な形式と分類
リニアモータテーブル LT
リニアモータテーブル LT…M
精密ロータリテーブル
精密アライメントテーブル
●ダイレクトドライブなので高速・高応答
●コンパクトで最大300mm のロングストローク
●高速・高分解能の回転位置決めテーブル
●高精度の位置決めで精密角度補正が可能
●コンパクトで大きな推力を発揮
●1台のドライバで、2台並列に配置した二軸パラレル
●クロスローラベアリングの採用で高精度・高剛性
●クロスローラベアリングの採用で高剛性・コンパクト
●最大2760mm のロングストロークが可能
運転が可能
AT
RT
302 〜 309 ページ参照
292 〜 301 ページ参照
LT
LT…M
214 〜 257 ページ参照
アライメントステージ モジュール形
アライメントモジュール AM
●多彩な動作を実現するXYθステージ
●用途に合わせて自由にステージを設計可能
●アライメントモジュールAMの採用で、低断面、コン
●高さ寸法の許容差を ±10μm に管理
パクト
258 〜 267 ページ参照
ナノリニア NT…V
ナノリニア NT
●ダイレクトドライブなので高速・高応答
●ダイレクトドライブなので高速・高応答
●断面高さが14mmと極めて小さくシンプルな形状
●断面高さが14mmと極めて小さくシンプルな形状
SA…M
●優れたコストパフォーマンスを実現
AM
310 〜 323 ページ参照
310 〜 323 ページ参照
アライメントステージ ダイレクトドライブ形
精密昇降テーブル
● XYθ3軸を組み合わせた断面高さがわずか52mm
●トラックレール軌道を一体化した、独自のくさび機構
(SA65DE)
を採用
● XY軸:0.1μm、
θ軸:0.36秒の高分解能(SA120DE)
●用途に合わせて選択できる、2 種類のくさび減速比
● C ルーブリニアウェイの採用でメンテナンスフリー化
を実現
NT…V
268 〜 291 ページ参照
10
NT
268 〜 291 ページ参照
SA…DE
324 〜 337 ページ参照
TZ
338 〜 343 ページ参照
11
精密位置決めテーブルのシステム構成
精密位置決めテーブルには、その性能を充分に発揮させるために、各モータに最適な制御装置を
ラインナップしています。ステッピングモータ及びリニアモータには、専用に開発した各種の制御装置がシリ
ーズ化されています。また、ACサーボモータにはモータメーカ純正の電装システムをラインナップしています。
これらを組み合わせることにより、駆動系、制御系を含めたトータルバランスの良いシステムを構成するこ
とができます。
また、これらの制御装置との各種接続コードも用意していますので合わせてご指示ください。
ステッピングモータを使用したシステム構成
プログラムコントローラ
ドライバ
精密位置決めテーブル
CTN
モータ
コード
AC サーボモータを使用したシステム構成
ドライバ
394ページ参照
388〜389ページ参照
パルス・リミットコード
リニアモータテーブル LT のシステム構成
精密位置決めテーブル
プログラムコントローラ
CTN
モータ
コード
コントロールユニット
モータ中継
コード
NCD
LT
リミットエンコーダ
中継コード
エンコーダ
コード
230ページ参照
394ページ参照
ナノリニア NT、アライメントステージ SA…DE のシステム構成
プログラムコントローラ
ドライバ
CTN
TDL
モータ
中継
コード
NT
パルス・
リミット
コード
パルス・リミットコード
エンコーダ
コード
SA…DE
379、381、383ページ参照
394ページ参照
12
13
精密位置決めテーブルの選定
精密位置決めテーブルの選定は、要求される条件に対して、関連深い事項を重点的に考慮します。
一般的な選定手順を以下に示します。
1
8
2
使用条件の確認
●使用するストローク長さ
●取付けスペース(高さ、幅、長さ)
●取付方向
●荷重の大きさと方向
●運転パターン
●使用環境
7
最終確認
●使用条件の再確認
●価格・納期
●追加工
●特殊テーブル
3
要求精度の確認
●位置決め精度
●繰返し位置決め精度
●運動の平行度 A、B
●真直度
●直角度
テーブル形式の仮選定
●スライドテーブルの送り機構
●大きさ
●ストローク長さ
●軸数
4
モータの仮選定
5
最高速度と分解能の検討
●標準 AC サーボモータ
●標準ステッピングモータ
●お客様指定モータ
再
検
討
6
システムの検討
●コントローラの選定
●センサの有無
●センサのタイミングチャート
●接続コード
●外部機器とのインターフェイス
決定
運転パターンの検討
●限界加速時間
●実効トルク
●イナーシャ
●位置決め時間
●ボールねじのリード
●モータの最高回転数
●エンコーダ仕様
●ドライバの選定
精密位置決めテーブルの特性
シリーズ
形式
TU シリーズ
TU
ロングストロークシリーズ
TSL…M
高剛性シリーズ
高精密シリーズ
クリーンテーブルシリーズ
マイクロテーブルシリーズ
コンパクトシリーズ
高速ロングストロークシリーズ
TSLH…M
CTLH…M
TX
CTX
TC…U
TC…US
ナノリニア NT…V・NT
ピエゾステージ
14
繰返し
位置決め精度
高速性
剛性
送り機構
30 ~ 1400
50 ~ 1000
◯
◯
◯
◯
ボールねじ
◯
◯
◯
◯
100 ~ 800
100 ~ 500
100 ~ 800
◎
◯
◯
◎
◎
◯
◯
◎
◎
◎
◯
◎
100 ~ 400
100 ~ 750
30 ~ 600
◎
◎
◯
◎
◯
◯
◯
△
◯
◯
◯
△
20
C ルーブ
ボールねじ
駆動用モータ センサ装備
ステッピング
AC サーボ
AC サーボ
ステッピング
ボールねじ
◯
△
△
AC サーボ
◎
◯
△
△
ステッピング
◎
◯
△
△
300 ~ 1200
200 ~ 1200
△
△
◎
◯
△
◎
◎
△
240 ~ 2760
460 ~ 2710
△
◎
◎
◯
△
◎
◎
◯
120 ~ 300
25、65、120
△
◎
◎
△
△
◎
◎
△
NT
25、65、120
△
◎
◎
△
SP
0.01
◎
◎
△
△
CT
TSLB
LT…LD
LT…M
NT…V
タイミング
ベルト
ステッピング
組立機、加工機、測定器
C ルーブリニアウェイ
2本並列
組立機、加工機、測定器
標準装備
C ルーブリニアウェイ
2本並列
精密加工機、精密測定器
工作機、組立機
標準装備
リニアローラウェイスーパーX 2本並列
精密加工機、精密測定器
工作機、組立機
選択
U 字形トラックレールリニアウェイ
半導体関連装置、液晶関連装置
選択
リニアウェイ L
精密測定器、組立装置
選択
標準装備
標準装備
標準装備
ピエゾ素子
用途
U 字形トラックレールリニアウェイ
標準装備
ACリニアサーボモータ
直動案内機器
標準装備
選択
AC サーボ
◯
TS
LT…H
リニアモータテーブル LT…M
位置決め精度
25 ~ 250
15 ~ 250
TM
LT…CE
リニアモータテーブル LT
ストローク長さ
mm
標準装備
2本並列
クロスローラウェイ
クロスローラウェイ(リニアウェイ L)
精密測定器、プローバ
画像処理装置、露光装置
リニアウェイ
2本並列
高速搬送、パレットチェンジャ
C ルーブリニアウェイ L
2本並列
C ルーブリニアウェイ
2本並列
C ルーブリニアウェイ L
C ルーブリニアウェイ L
半導体関連装置、液晶関連装置
2本並列
C ルーブリニアウェイ L 、リニアウェイ L 2本並列
ー
半導体関連装置、高速搬送装置
半導体関連装置、医療機器
半導体関連装置、光学機器
15
精密位置決めテーブルの大きさ
精密位置決めテーブルのストローク長さ
TU25
TU25
TU30
TU30
TU40
TU40
TU50
TU50
TU60
TU60
TU86
TU86
TU100
TU100
TU130
TU130
TSL90M
TSL90M
TSL120M
TSL120M
TSL170M
TSL170M
TSL170SM
TSL170SM
TSL220M
TSL220M
精
密
位
置
決
め
テ
ー
ブ
ル
の
形
式
と
大
き
さ
精
密
位
置
決
め
テ
ー
ブ
ル
の
形
式
と
大
き
さ
TSLH120M
TSLH220M
TSLH320M
TSLH420M
TX120
TX220
TX320
TX420
TC30US
TC40US
TC50US
TSLH120M
TSLH220M
TSLH320M
TSLH420M
TX120
TX220
TX320
TX420
TC30US
TC40US
TC50US
TC60US
TC60US
TC60U
TC60U
TC86U
TC86U
TM15
TS.CT
TS.CT
TSLB
TSLB
LT
LT...M
LT
LT...M
NT...V
TM15
NT...V
NT
NT
SA...M
SA...DE
SA...M
SA...DE
SP
SP
0
50
100
150
200
250
テーブルの幅寸法
300
350
400
0
800
300
600
900
1200
1800
2700
3000
ストローク長さ mm
mm
グラフの見方
グラフの見方
●グラフの値は目安ですので、詳細については形式別解説をご参照ください。
●グラフの値は目安ですので、詳細については形式別解説をご参照ください。
●棒グラフの長さは、標準化されているストローク長さの範囲を示します。
16
1500
17
精密位置決めテーブルの繰返し位置決め精度
精
密
位
置
決
め
テ
ー
ブ
ル
の
形
式
と
大
き
さ
精密位置決めテーブルの位置決め精度
TU25
TU30
TU40
TU50
TU60
TU86
TU100
TU130
TSL90M
TSL120M
TSL170M
TSL170SM
TSL220M
TSLH120M
TSLH220M
TSLH320M
TSLH420M
CTLH120M
CTLH220M
CTLH320M
TX120
TX220
TX320
TX420
CTX120
CTX220
TC30US
TC40US
TC50US
TC60US
TC60U
TC86U
TM15
TS
CT
TSLB
LT
LT...M
NT...V
NT
SA...M
...
SA DE
SP
精
密
位
置
決
め
テ
ー
ブ
ル
の
形
式
と
大
き
さ
0
±1
±2
±3
±4
±5
±6
± 20
± 40
± 60
± 80
TU25
TU30
TU40
TU50
TU60
TU86
TU100
TU130
TSL90M
TSL120M
TSL170M
TSL170SM
TSL220M
TSLH120M
TSLH220M
TSLH320M
TSLH420M
CTLH120M
CTLH220M
CTLH320M
TX120
TX220
TX320
TX420
CTX120
CTX220
TC30US
TC40US
TC50US
TC60US
TC60U
TC86U
TM15
TS
CT
TSLB
LT
LT...M
NT...V
NT
SA...M
...
SA DE
SP
± 100
0
10
20
30
40
50
70
位置決め精度 μ m
繰返し位置決め精度 μ m
グラフの見方
グラフの見方
●グラフの値は目安ですので、詳細については形式別解説をご参照ください。
●ボールねじ駆動の形式は、研削ボールねじを選択した場合の値を示しています。
● 2 つ以上の値が示されている形式は、ストローク長さなどによって値が異なることを意味しています。
● TUは、スタンダードテーブルの値を示しています。
● CTLH…M、CTX、CT は、二軸仕様のテーブルです。
● SA…M、SA…DEは、X 軸の値を示しています。
●グラフの値は目安ですので、詳細については形式別解説をご参照ください。
●ボールねじ駆動の形式は、研削ボールねじを選択した場合の値を示しています。
● 2つ以上の値が示されている形式は、ストローク長さなどによって値が異なることを意味しています。
● TUは、スタンダードテーブルの値を示しています。
● CTLH…M、CTX、CT は、二軸仕様のテーブルです。
18
60
19
精密位置決めテーブルの最高速度
精
密
位
置
決
め
テ
ー
ブ
ル
の
形
式
と
大
き
さ
精密位置決めテーブルの搭載質量
TU25
TU30
TU40
TU50
TU60
TU86
TU100
TU130
TSL90M
TSL120M
TSL170M
TSL170SM
TSL220M
TSLH120M
TSLH220M
TSLH320M
TSLH420M
TX120
TX220
TX320
TX420
TC30US
TC40US
精
密
位
置
決
め
テ
ー
ブ
ル
の
形
式
と
大
き
さ
TC50US
TC60US
TC60U
TC86U
TM15
TS.CT
TSLB
LT100CEG
LT150CEG
LT130LDG
LT170LDG
LT170LDV
LT130H
LT170H
LT...M
NT...V
NT
SA...M
SA...DE
0
500
1000
最高速度
1500
2000
TU25
TU30
TU40
TU50
TU60
TU86
TU100
TU130
TSL90M
TSL120M
TSL170M
TSL170SM
TSL220M
TSLH120M
TSLH220M
TSLH320M
TSLH420M
TX120
TX220
TX320
TX420
TC30US
TC40US
TC50US
TC60US
TC60U
TC86U
TM15
TS.CT
TSLB
LT100CEG
LT150CEG
LT130LDG
LT170LDG
LT170LDV
LT130H
LT170H
LT...M
NT...V
NT
SA...M
SA...DE
3000
0
mm / s
50
100
150
200
最大搭載質量
グラフの見方
グラフの見方
●グラフの値は目安ですので、詳細については形式別解説をご参照ください。
●ボールねじ駆動の形式は、選択できる最長のボールねじリードでの値を示しています。
●上段は ACサーボモータ、下段はステッピングモータ仕様の値を示しています。
●ボールねじ駆動の形式は、ストローク長さによってはボールねじの許容回転数によって制限される場合があります。
●グラフの値は目安ですので、詳細については形式別解説をご参照ください。
● TUは、スタンダードテーブルの値を示しています。
● LT、LT...M、NT...V、NT の値は、最大可搬質量を示しています。
● TM、TS.CT、SA…M の値は、耐荷重を質量に換算して表示しています。
20
250
300
350
400
kg
21
精度
精密位置決めテーブルの精度規格は形式によって異なり、その測定方法を以下に示します。また、ご
要望により動特性試験など使用条件に合わせたモデル試験も行っていますので、
にお問い合わせ
ください。
精密位置決めテーブルには、
各形式の精度規格に関する検査成績表又は検査合格証が添付されています。
位置決め精度
真直度
基
準
(移動距離の指令値)
位 ⊿L=(実際に移動した距離)−
置
繰返し位置決め精度
ë1
ë2
ë7
測定値ë1、ë2、…ë7の最大差の1/2
運動の平行度A
22
真直度
⊿
XY運動の直角度
X軸とY軸の運動の直角度をいいます。
スライドテーブル上に直角定規をどちらかの
移動軸方向を基準に定置し、基準の移動軸と直
角にテストインジケータを当て、その軸のスト
ローク長さ内の読みの最大差を測定値としま
す。
X
バックラッシ
X
Y
スライドテーブルの運動と平面(テーブル取
付面)との平行度(インジケータ定置)をいい
ます。
精密位置決めテーブルを取り付けた定盤上に
インジケータを固定し、スライドテーブル中央
にテストインジケータを当て、X方向及びY方
向のストローク長さのほぼ全域にわたり測定
し、読みの最大差を測定値とします。
直線であるべきスライドテーブルの運動が、
理想直線から狂っている程度をいいます。
・水平真直度:スライドテーブルの移動軸の左
右(水平)方向の動き。
・垂直真直度:スライドテーブルの移動軸の上
下(垂直)方向の動き。
テストバーとインジケータ又はレーザ真直度
測定システムで測定します。測定値を互いに平
行な二つの直線で、その間隔が最小になるよう
にはさんだ時の両直線の間隔で表します。
Y
移動距離 L
任意の一点に同じ方向から位置決めを7回繰
り返して停止位置を測定し、読みの最大差の
1/2を求めます。
この測定を原則としてストローク長さの中央
及びほぼ両端のそれぞれの位置で行い、求めた
値のうち最大のものを測定値とします。最大差
の1/2に±を付けて表します。
スライドテーブルの運動と平面(テーブル取
付面)との平行度(インジケータ移動)をいい
ます。
スライドテーブル中央にインジケータを固定
し、精密位置決めテーブルを取り付けた定盤上
にテストインジケータを当て、X方向及びY方
向のストローク長さのほぼ全域にわたり測定
し、読みの最大差を測定値とします。
⊿L
測定間隔
基準位置から一定方向に順次位置決めを行
い、それぞれの位置で実際に移動した距離と移
動すべき距離との差を測定し、それらのストロ
ーク長さ内における最大差を絶対値で表示しま
す。
運動の平行度B
スライドテーブルに送りをかけて、わずか動
かしたときのテストインジケータの読みを基準
とし、更にその状態から送り装置によらずに、
スライドテーブルを同方向に所定の荷重で動か
し、荷重を抜いた時に基準値との差を求めます。
この測定をストローク長さの中央及びほぼ両
端のそれぞれの位置で行い、求めた値のうち最
大のものを測定値とします。
23
搭載質量・負荷荷重
最高速度と分解能
■最大搭載質量
■最高速度
最大搭載質量とは、精密位置決めテーブルを水平使用した時に搭載することができる最大質量の目安
です。搭載する質量の位置(高さ寸法H、長さ寸法L)によって大きさが異なります。
(図1参照)
最大搭載質量は、各形式・大きさの最高速度、加減速時間0.2sで連続運転した時に、ボールねじ又は直
動案内機器の定格寿命が18000時間になる質量を基準にして算出しています。
TU、TSL…M、TSLH…M、TXに設定されています。
精密位置決めテーブルの最高速度は、次の式によって求めることができます。
ボールねじ駆動の形式は、ストローク長さによってはボールねじの許容回転数によって制限される場
合があるので注意が必要です。各形式の諸特性の項をご参照ください。
リニアモータ駆動の形式は最高速度が決まっていますので、各形式の諸特性の項をご参照ください。
■耐荷重
ボールねじ駆動
耐荷重とは、精密位置決めテーブルを水平使用した時に、機能上・性能上支障なく使用することがで
きる静的な最大荷重をいいます。精度が保証できる荷重はこの値の約1/2になります。
TM、TS、CT、RT、AT、TZ、SA…M、SPに設定されています。
■可搬質量
モータの最高回転数(r/min)
最高速度(mm/s)=ボールねじのリード(mm)
×――――――――――――――
60
タイミングベルト駆動
可搬質量とは、必要な加速度が得られる最大質量をいい、使用するモータのトルク特性により制限さ
れます。搭載質量が大きくなるにつれて、限界加速時間は長くなります。運転パターンの検討の項をご
参照ください。
リニアモータ駆動の形式(LT、NT…V、NT)及びダイレクトドライブの形式(SA…DE)は、基準の
移動速度における加速度と可搬質量の関係を示した動的可搬質量が設定されています。
モータの最高回転数(r/min)
最高速度(mm/s)=プーリのピッチ径×π
(mm)×――――――――――――――
60
(プーリのピッチ径×π=100mm)
実際の位置決め時間を求めるには、加減速時間やストローク長さなどの条件による運転パターンを検
討する必要があります。運転パターンの検討の項をご参照ください。
L
■分解能
H
搭載質量W
分解能とは精密位置決めテーブルが可能な最小送り量をいい、次の式によって求めることができます。
リニアモータ駆動の形式は分解能が決まっていますので、各形式の諸特性の項をご参照ください。
ボールねじ駆動
ボールねじのリード(mm)
分解能(mm/pulse)=―――――――――――――――
モータ1回転の分割数(pulse)
タイミングベルト駆動
図1 搭載質量の位置
24
プーリのピッチ径×π(mm)
分解能(mm/pulse)=―――――――――――――――
モータ1回転の分割数(pulse)
(プーリのピッチ径×π=100mm)
25
運転パターンの検討
■位置決め時間の算出
■限界加速時間の算出
精密位置決めテーブルが実際に移動する時の位置決め時間は、
次の式によって算出することができます。
高精度な位置決めが要求される用途においては、定速移動時間や加減速時間のほかに、指令パルス入
力が完了してからテーブルが完全に位置決めポイントに停止するまでの整定時間や機械装置の振動減衰
時間などを考慮する必要があります。
精密位置決めテーブルが駆動するときに必要なトルク(推力)は、加速時に最も大きくなります。こ
の加速に要するトルク(推力)は、モータの出力トルク(リニアモータの推力)によって制限されます。
したがって、テーブルを水平使用する場合の限界加速時間は、次の式によって算出されます。
ボールねじ駆動・タイミングベルト駆動の場合
長距離の位置決め
●負荷トルク TL
ここでいう長距離とは、加減速時間を考慮し
ても十分定速移動時間がある距離のことです。
テーブルの動き
ここに、t :位置決め時間 s
ta、tb :加減速時間 s
tc :定速移動時間 s
td :整定時間 s
L1 :移動距離 mm
V1 :移動速度(設定速度) mm/s
V1
移動指令
速度
L1
ta+tb
t=―――+――――+td
V1
2
移動距離
L1
時間
ta
tb
tc
td
t
ë
TL=T0+μWg・―――[N・m]……ボールねじ駆動
2πη
ë
TL=T0+(Wg×くさび減速比)・―――[N・m]…TZに適用
2πη
r
TL=T0+μWg・――[N・m]……タイミングベルト駆動
η
●加速トルク Ta
2πN
Ta=(JT+JM+JC+JL)・―――[N・m]
60ta
ë 2
JL=W・(――)[kg・m2]………ボールねじ駆動
2π
ë 2
2
JL=W・(――)×くさび減速比[kg・m2]
……TZに適用
2π
2
2
JL=W・r [kg・m ]………タイミングベルト駆動
●加速に要するトルク TP
TP=TL+Ta[N・m]
(TP×k<TM)
●限界加速時間 ta
2πN
k
ta=(JT+JM+JC+JL)・―――・―――[s]
60
TM−TL
短距離の位置決め
L2
ta+tb
t=―――+――――+td
V2
2
ここに、t :位置決め時間 s
ta、tb :加減速時間 s
td :整定時間 s
L2 :移動距離 mm
V1 :設定速度 mm/s
V2 :移動速度 mm/s
26
[ATの場合]
(約0.5×10-5kg・m2)
JL :搭載質量のイナーシャ kg・m2
N :モータ回転数 r/min
ta :加速時間 s
g :重力加速度(9.8m/s2)
TM :モータの出力トルク N・m
・ステッピングモータのTMは、モータ回転数
Nにおける出力トルクを図2のトルク特性図
から読み取ってください。
・ACサーボモータのTMは、定格トルクの2〜3
倍にしてください。
k :安全係数
(ACサーボモータ
:1.3)
(ステッピングモータ:1.5〜2)
くさび減速比:1:2の時 0.5
:1:4の時 0.25
R0 :テーブル中心から搭載物の重心までの距離 m
L :テーブル中心からローテータまでの距離 m
●負荷トルク TL
V1
テーブルの動き
V2
移動指令
速度
ここでいう短距離とは、定速移動に達するま
でに減速してしまうような、定速移動時間のな
い距離のことです。
T0 :起動トルク N・m
μ :転がり案内部の摩擦係数(0.01)
W :搭載質量 kg
ë :ボールねじのリード m
r :プーリのピッチ半径(0.0159m)
η :効率 0.9
JT :テーブルイナーシャ kg・m2
JM :モータイナーシャ kg・m2
JC :カップリングイナーシャ
移動距離
L2
時間
ta
tb
t
td
ë
TL=T0+μWg・―――
2πη
●搭載質量のイナーシャ
ë・R0 2
JL=W・(―――)
2πL
●ローテータまでの距離
形式
AT120A
AT200A
AT300A
JL
L
ë[m]
0.001
0.001
0.002
L[m]
0.100
0.130
0.186
27
ダイレクトドライブ(SA…DE)の場合
リニアモータ駆動の場合
μ :転がり案内部の摩擦係数 0.01
WT :可動部質量 kg
WL :搭載質量 kg
FR :走行抵抗 N
[LT…CE、LT…LD、LT…Mの場合]
●転がり案内部の摩擦抵抗 Ff
Ff=μ(WL+WT)g[N]
ただしFfの最小値は次の値とする。
LT100CEの時
LT150CEの時
LT130LDの時
LT170LDの時
LT45Mの時
Fc
2.5N
5.0N
6.0N
6.0N
1.5N
FM
ta
V
g
k
●走行抵抗による力 FL
FL=Ff+Fc[N]
[LT…Hの場合]
注(1)コード引回し抵抗は、コードの質量や引回し
方法によって変動します。想定される抵抗値を用い
て計算してください。
●走行抵抗 FR
LT130H:20[N]
(LT130H:20N)
(LT170H:40N)
:コード引回し抵抗(1) N
(LT :約1.0N)
(NT…V、NT:なし)
:リニアモータの推力 N
(移動速度Vにおける最大推力)
:加速時間 s
:移動速度 m/s
:重力加速度 9.8m/s2
:安全係数(1.3)
[SA…DE/X(Y)の場合]
●転がり案内部の摩擦抵抗 Ff
Ffは次の値とする。
SA65DE/Xの時
SA120DE/Xの時
0.5N
3.0N
●走行抵抗による力 FL
FL=Ff+Fc[N]
●加速による力 Fa
WT :可動部質量 kg
WL :搭載質量 kg
Fc :コード引回し抵抗(1) N
FM :リニアモータの推力 N
(移動速度Vにおける最大推力)
ta :加速時間 s
V :移動速度 m/s
k :安全係数(1.3)
注(1)コード引回し抵抗は、コードの質量や引回し
方法によって変動します。想定される抵抗値を用い
て計算してください。
V
(WL+WT)
・――[N]
Fa=
ta
●加速に要する推力 FP
FP=Fa+FL[N]
LT170H:40[N]
●限界加速時間 ta
●速度係数 fV
移動速度 V[m/s]
0.5を超え0.5以下
0.5を超え1.0以下
1.0を超え1.5以下
LT130H
LT170H
1.00
1.50
2.25
(WL+WT)・V・k
ta=――――――――[s]
FM−FL
●走行抵抗による力 FL
FL=fV・FR+Fc[N]
[NT…V、NTの場合]
●走行抵抗による力 FL
FL=1.5[N]
●加速による力 Fa
V
(WL+WT)・――[N]
Fa=
ta
●加速に要する推力 FP
FP=Fa+FL[N]
●限界加速時間 ta
(WL+WT)
・V・k
ta=――――――――[s]
FM−FL
28
29
■実効トルク・実効推力の算出
[SA…DE/Sの場合]
JL :積載物慣性モーメント kg・m2
JT :可動部慣性モーメント kg・m2
Mc :コード引回し抵抗(1) N・m
MM :アライメントステージのトルク N・m
ta :加速時間 s
R :移動速度 rad/s
k :安全係数(1.3)
●転がり案内部の摩擦抵抗 Mf
Mfは次の値とする。
SA65DE/Sの時
0.03N・m
SA120DE/Sの時 0.1N・m
SA200DE/Sの時 0.2N・m
●回転抵抗によるトルク ML
注(1)θ軸可動部にコードはありませんので、積載
物がコードを引回さない場合にはコード引回し抵抗
は0としてください。
積載物慣性モーメントは以下に示す計算式を参考
に算出してください。
ML=Mf+Mc[N]
●加速によるトルク Ma
R
Ma=(JL+JT)・――[N・m]
ta
精密位置決めテーブルが駆動するときは、加減速時に大きなトルク(推力)を要するため、ACサーボ
モータを使用する場合及びリニアモータ駆動の場合、運転パターンの稼働率によっては、実効トルク
(実効推力)がモータの定格トルク(定格推力)より大きくなることがあります。この状態で運転を続け
ますと、モータが過熱、焼付きをおこすおそれがありますので、実効トルク(実効推力)がモータの定
格トルク(定格推力)より小さいことを確認してください。テーブルの運転パターンによる実効トルク
(実効推力)は、次の式により算出されます。
モータの定格トルク(定格推力)が、実効トルク(実効推力)より大きければ、その運転パターンで
の連続運転が可能です。
ACサーボモータを使用する場合
V
●加速に要するトルク MP
TP2×ta+
(TP−2×TL)2×ta+TL2×tc
Trms= ――――――――――――――――[N・m]
t
MP=Ma+ML[N・m]
●限界加速時間 ta
速度
●実効トルク Trms
時間
TP
(FP)
リニアモータ駆動の場合
●実効推力 Frms
慣性モーメントの計算
p:密度 m:質量
円 柱
四角柱
FP2×ta+
(FP−2×FL)2×ta+FL2×tc
Frms= ――――――――――――――――[N]
t
Ta
(Fa)
トルク(推力)
(JL+JT)・R・k
ta=――――――――[s]
MM−ML
TL
(FL)
時間
ta
tc
ta
1サイクル時間t
オフセット回転
a
b
FP2×ta+
(FP−2×FL)2×ta+FL2×tc
Frms= ――――――――――――――――[N]
t
c
t
r3
●実効推力(SA…DE/X
(Y)に適用) Frms
速度(回転速度)
ダイレクトドライブ(SA…DE)場合
r
V
時間
FP
(MP)
30
1
(a2+b2)
JL= ―・p・a・b・c・
12
1
= ―・m・
(a2+b2)
12
= JL+m・r32
JL′
JL′
: 回転中心からの
慣性モーメント
JL : 重心を中心に回転するときの
慣性モーメント
推力(トルク)
1
JL = ―・π・p・t・r4
2
1
= ―・m・r 2
2
Fa
(Ma)
FL
(ML)
●実効トルク(SA…DE/Sに適用) Mrms
MP2×ta+(MP−2×ML)2×ta+ML2×tc
Mrms= ―――――――――――――――――[N・m]
t
時間
ta
tc
ta
1サイクル時間t
31
■運転パターンの検討例
リニアモータ駆動の場合
リニアモーターテーブルの稼働率によっては実効推力 STEP1
ACサーボモータを使用する場合
が定格推力を超え、モータの過熱、焼付きにより故障や
●使用条件
取付方向
搭載質量
W
ストローク長さ
L
移動速度(設定速度) V
加減速時間
ta
定速移動時間
tc
1サイクル時間
t
水平使用
30kg
300mm
300mm/s
0.2s
0.8s
2.0s
●加速に要するトルクの算出
けがの原因となる可能性があります。運転前には必ず実
・負荷トルク TL
効推力が定格推力以下であることをご確認ください。
以下にLT170HSを使用した場合の運転パターンの検
ë
TL=T0+μWg・―――
2πη
討例を示します。225ページの動的可搬質量のグラフか
ら搭載質量と加速度を考慮して下記のような運転パター
0.01
=0.12+0.01×30×9.8×――――――
2×π×0.9
≒0.13[N・m]
ンを仮設定します。
V
加速に要する推力の計算
①走行抵抗による力 FL
FL=fV×FR+Fc=2.25×40+1=91[N]
②加速による力 Fa
V
Fa=(WL+WT)・――
ta
1.5
=(30+4.0)
×――=170[N]
0.3
・加速トルク Ta
速度
ストローク長さ
300mm
時間s
トルク
N.m
TP
Ta
・加速に要するトルク TP
TL
速度
時間
FP=Fa+FL
=170+91=261[N]
ここで、FP×k(安全係数)が225ページの推力特性カ
ーブ以下であることを確認してください。この値を超え
FP
る場合は、運転パターンの最高速度や加減速時間等の再
Fa
検討を行ってください。
例題のパターンでは以下のとおり推力特性カーブ以下
FL
であることがわかります。
時間
1.5m/s時の最大推力FM=約550[N]
FP×k=261×1.3=339.3[N]
<FM
TP=TL+Ta=0.13+0.09=0.22[N・m]
時間s
0.2
0.8
0.2
2.0
ここで、TP×k(安全係数)がモータの出力トルクTM
より小さいことを確認します。
この値を超える場合は、最高速度や加減速時間の再検
討を行ってください。
検討中の運転パターンでは、以下のように出力トルク
TMより小さい値となります。
TM=0.318×3≒0.95[N・m]
TP×k=0.22×1.3=0.29[N・m]<TM
●位置決めテーブルの仮選定
TU60S49A/Y028G10S03を仮選定。
基本仕様
ボールねじのリード
ストローク長さ
最高速度
起動トルク
テーブルイナーシャ
使用ACサーボモータ
定格トルク
モータイナーシャ
32
③加速に要する推力 FP
L
推力
mm/s
300
ë 2
JL=W・ ――
2π
0.01 2
=30× ――― ≒7.60×10-5[kg・m2]
2×π
60
60
N=V×――=0.3×―――=1800[r/min]
ë
0.01
2πN
(JT+JM+JC+JL)
・―――
Ta=
60ta
2×π×1800
=
(0.93+0.364+0.5+7.60)×10-5×――――――
60×0.2
≒0.09[N・m]
ë
T0
JT
JM
10mm
300mm
500mm/s
0.12N・m
0.93×10-5kg・m2
SGMAH-01AAA21-E
0.318N・m
0.364×10-5kg・m2
・実効トルク Trms
2
TP2×ta+
(TP−2×TL)
×ta+TL2×tc
Trms= ――――――――――――――――
t
2
tc
ta
STEP2 実効推力の検討
t
・実効推力 Frmsは以下のように求められます。
設定項目
形式
可動部質量
テーブル仕様 移動速度Vに
おける最大推力
走行抵抗
速度係数
搭載質量
移動距離
移動速度(設定速度)
●実効トルクの検討
2
ta
2
0.22 ×0.2+(0.22−2×0.13)×0.2+0.13 ×0.8
= ―――――――――――――――――――
2.0
≒0.11[N・m]
モータの定格トルクは、実効トルクTrmsより大きいの
で、検討中の運転パターンでの連続使用が可能と判断で
きます。
時間
コード引回し抵抗
安全係数
環境温度
LT170HS(自冷)
WT 4.0kg
254ページ参照
FM 約550N
225ページ参照
FR 限界加速時間の算出項
fV [LT…Hの場合]参照
WL 30kg
L 1.2m
V 1.5m/s
ta 0.3s
tc 0.5s
t 2.5s
Fc 1.0N
想定値です
k 1.3
30℃
FP2×ta+(FP−2×FL)2×ta+FL2×tc
Frms= ――――――――――――――――
t
2612×0.3+(261−2×91)2×0.3+912×0.5
= ――――――――――――――――――
2.5
≒103[N]
ここで、Frmsが定格推力以下であることを確認してく
ださい。定格推力を超える場合は運転パターンの最高速
度や加減速時間等の再検討を行ってください。(LT…H
は環境温度により推力特性が変化するため、定格推力特
性の図をご参照ください。
)
例題のパターンでは環境温度30℃の時の定格推力は約
117Nであるため、103N<117N(定格推力)となり連
続運転が可能と判断できます。
33
STEP3 Y軸の加速に要する推力・実効推力の
検討
ダイレクトドライブ(アライメントステージSA…DE)の場合
アライメントステージSA…DEの稼働率によっては実 STEP1
X軸の加速に要する推力の計算
効推力が定格推力を超え(もしくは実効トルクが定格ト
①走行抵抗による力 FL
ルクを超え)、モータの過熱、焼付きにより故障やけが
FL=Ff+Fc=3.0+1.0=4.0[N]
運転パターンが同じ場合には可動部質量が小さい分Y
軸の方が条件は軽くなるので、本例では省略します。
の原因となる可能性があります。運転前には必ず実効推
力が定格推力以下であること(もしくは実効トルクが定 ②加速による力
V
Fa=
(WL+WT)
・――
ta
0.1
した場合の運転パターンの検討例を示します。
=
(5.0+5.9)×―――=21.8[N]
0.05
限界加速時間を考慮して下記のような運転パターンを
③加速に要する推力 FP
仮設定します。
FP=Fa+FL
=21.8+4.0=25.8[N]
θ
軸
運
転
パ
タ
ー
ン
設定動作角度
最高速度
加減速時間
等速移動時間
サイクル時間
コード引回し抵抗
安全係数
①回転抵抗によるトルク ML
ML =Mf+Mc
=0.1+0.0=0.1[N・m]
ここで、FP×k(安全係数)が328ページの最大推力以
下であることを確認してください。この値を超える場合
は、運転パターンの最高速度や加減速時間等の再検討を
行ってください。
例題のパターンでは以下のとおり最大推力以下である
ことがわかります。
SA120DE/Xの最大推力FM=70[N]
FP×k=25.8×1.3=33.54[N]
<FM
②加速によるトルク Ma
R
Ma =
(JL+JT)
・――
ta
π
=
(0.01+0.02)×―――≒0.754[N・m]
0.05
0.8542×0.05+(0.854−2×0.1)2×0.05+0.12×0.05
= ――――――――――――――――――
0.4
≒0.38[N・m]
ここで、 Mrmsが定格トルク以下であることを確認し
てください。定格トルクを超える場合は運転パターンの
最高速度や加減速時間等の再検討を行ってください。例
題のパターンでは連続運転が可能と判断できます。
※注意
積載物が回転中心からオフセットしている場合
には、XY軸の加減速が θ 軸へのトルク負荷と
なるため、注意が必要です。
③加速に要するトルク MP
MP =Ma+ML
=0.754+0.1=0.854[N・m]
ここで、MP×k(安全係数)が328ページの最大トル
ク以下であることを確認してください。この値を超える
V
場合は、運転パターンの最高速度や加減速時間等の再検
速 度
SA120DE/XYS
5.0kg
1.0×10-2kg・m2
5.9kg
0.01m
0.1m/s
0.05s
0.05s
0.4s
1.0N
3.4kg
0.01m
0.1m/s
0.05s
0.05s
0.4s
1.0N
2.0×10-3kg・m2
0.1πrad
L
18°
πrad/s
R
180°
/s
ta
0.05s
tc
0.05s
t
0.4s
Mc
0.0N・m
k
1.3
(MP−2×ML)2×ta+ML2×tc
MP2×ta+
Mrms = ―――――――――――――――――
t
STEP4 θ軸の加速に要するトルクの検討
以下にアライメントステージSA120DE/XYSを使用
WL
JL
WT
L
V
ta
tc
t
Fc
WT
L
V
ta
tc
t
Fc
JT
・実効トルク Mrmsは以下のように求められます。
Fa
格トルク以下であること)をご確認ください。
設定項目
テーブルの形式
積載質量
積載物慣性モーメント
可動部質量
X
軸 設定ストローク
運 最高速度
転 加減速時間
パ
タ 等速移動時間
ー サイクル時間
ン
コード引回し抵抗
可動部質量
Y
軸 設定ストローク
運 最高速度
転 加減速時間
パ
タ 等速移動時間
ー サイクル時間
ン
コード引回し抵抗
可動部慣性モーメント
X軸と同様の計算を行います。
STEP5 実効トルクの検討
討を行ってください。例題のパターンでは以下のとおり
最大トルク以下であることがわかります。
時間
ta
tc
ta
t
SA120DE/Sの最大トルクMM=2.0[N・m]
MP×k=0.854×1.3≒1.11[N・m]<MM
STEP2 実効推力の検討
・実効推力 Frmsは以下のように求められます。
2
(FP−2×FL)
×ta+FL2×tc
FP2×ta+
Frms= ――――――――――――――――
t
25.82×0.05+(25.8−2×4.0)2×0.05+4.02×0.05
= ――――――――――――――――――
0.4
≒11.17[N]
ここで、Frmsが定格推力以下であることを確認してく
ださい。定格推力を超える場合は運転パターンの最高速
度や加減速時間等の再検討を行ってください。例題のパ
ターンでは連続運転が可能と判断できます。
34
35
センサ仕様・取付け
精密位置決めテーブルには、オーバラン防止用のCW・CCWリミットセンサと機械原点検出用の原点
前・原点センサがあります。テーブルの形式によって、これらのセンサが標準装備されているものと呼
び番号で取付けを指定するものがあります。
精密位置決めテーブルに使用されているセンサの種類を表1に、各センサの仕様を表2〜表4に示しま
す。また、コネクタの仕様を表5、表6に示します。
センサのタイミングチャートについては、各形式のセンサ仕様の項をご参照ください。
表2 フォトセンサの仕様
センサ
項目
電源電圧
消費電流
出力
表1 センサの種類
原点前
出力動作
動作表示
フォトセンサ
リミット、原点前、原点
DC5〜24V ±10%
15mA以下
NPNトランジスタ オープンコレクタ
・最大流入電流 :50mA
・印加電圧
:DC30V以下
・残留電圧
:流入電流50mAにて0.7V以下
16mAにて0.4V以下
入光時ON/OFF選択式
(1)
朱色LED(入光時点灯)
CCWリミット
VCC
OUT1
回路図
主回路
OUT2
GND
cw ccw
注(1) OUT1を使用し、入光時ONの設定としています。
表3 近接センサの仕様
近接センサ
センサ
項目
CWリミット
センサ
テーブルの形式
1
TU
()
TSL…M
TSLH…M・CTLH…M
TX・CTX
TC
TM
(5)
55/55(T)
TS・CT
(1 )
上記以外
TSLB
LT…CE
LT…LD
LT…H
LT…M
NT…V
NT
RT(1)
AT
SA…M・AM
SA…DE
TZ
SP
リミット、原点前
原点
DC12〜24V ±10%
10mA以下
NPNトランジスタ オープンコレクタ
・最大流入電流:30mA以下(抵抗負荷)
・印加電圧
:DC26.4V以下
・残留電圧
:流入電流30mAにて1V以下
接近時OFF
接近時ON
橙色LED(検出時消灯)
橙色LED(検出時点灯)
電源電圧
消費電流
原点
CWリミット
CCWリミット
原点前
原点
近接センサ
近接センサ
フォトセンサ
フォトセンサ
近接センサ
磁気センサ
メカ式スイッチ
フォトセンサ
近接センサ
−
内蔵(3)
内蔵(3)
−
−
内蔵(3)
フォトセンサ
近接センサ
近接センサ
内蔵(3)
近接センサ
内蔵(3)
近接センサ
近接センサ
フォトセンサ
フォトセンサ
近接センサ
磁気センサ
メカ式スイッチ
フォトセンサ
近接センサ
−
内蔵(3)
内蔵(3)
−
−
内蔵(3)
フォトセンサ
近接センサ
近接センサ
内蔵(3)
近接センサ
内蔵(3)
近接センサ
近接センサ
フォトセンサ
フォトセンサ
近接センサ
磁気センサ
近接センサ
フォトセンサ
近接センサ
−
内蔵(3)
内蔵(3)
−
−
内蔵(3)
フォトセンサ
−
近接センサ
内蔵(3)
近接センサ
−
近接センサ
フォトセンサ
(2)
フォトセンサ
(2)
−
(4)
近接センサ
磁気センサ
フォトセンサ
フォトセンサ(2)
近接センサ
内蔵(3)
内蔵(3)
内蔵(3)
内蔵(3)
内蔵(3)
内蔵(3)
−
(2)
−
−(2)
内蔵(3)
近接センサ
内蔵(3)
注
(1) センサの取付けは呼び番号で指定します。他の形式は標準装備されています。
(2) ACサーボモータを使用する場合およびRTには原点センサは付いていません。エンコーダのC相又はZ相信号を使用して
ください。
(3) テーブル内部にセンサが内蔵されており、適用する専用コントロールユニット又は専用ドライバから各信号が出力され
ます。
(4) ドライバから出力されるリニアエンコーダの原点信号を使用してください。
5
( ) センサの取付けは呼び番号で指定します。テーブル内部にセンサが内蔵されており、専用センサアンプから各信号が出
力されます。ACサーボモータを使用する場合、原点信号はエンコーダのC相またはZ相を使用してください。
出力
出力動作
動作表示
Vcc
回路図
OUT
主回路
GND
表4 磁気センサの仕様
磁気センサ
センサ
項目
リミット、原点前
電源電圧
消費電流
(1)
出力(2)
出力動作
動作表示
原点
DC12〜24V ±10%
65mA以下
NPNトランジスタ オープンコレクタ
・最大流入電流:12mA
・印加電圧
:DC36V以下
・残留電圧
:流入電流12mAにて1.7V以下
4mAにて1.1V以下
接近時OFF
接近時ON
CWリミット :黄色LED(検出時点灯)
CCWリミット :赤色LED(検出時点灯)
赤色LED(検出時点灯)
原点前
:赤色LED(検出時点灯)
Vcc
OUT
回路図
主回路
GND
注(1) センサアンプを含めたシステム全体の消費電流です。
(2) 1回路あたりの出力です。
36
37
使用上の注意
表5 コネクタ仕様(TM以外用)
ピン
No.
1
2
3
4
5
6
信号名
表6 コネクタ仕様(TM用)
使用コネクタ
(タイコ エレクトロニクス ジャパン合同会社製)
センサ側
相手側
原点
キャップ・ハウジング プラグ・ハウジング
原点前
172168-1
172160-1
CWリミット
接触子
CCWリミット
170365-1
接触子
電源入力
170366-1
170363-1
GND
備考1. 相手側コネクタはお客様にてご用意ください。
2. ACサーボモータを使用する場合及びRTには、原点信
号の配線はありません。
3. LT、NT…V、NT、SPにはコネクタはありません。専
用コントロールユニットまたは、専用ドライバから各
信号が出力されます。
4. CTには適用されません。
5. ATには、原点前、原点信号の配線はありません。
6.TX、CTXは、ドライバから出力されるリニアエンコ
ーダの原点信号を使用してください。
ピン
No.
信号名
1
2
3
4
5
6
原点
原点前
CWリミット
CCWリミット
電源入力
GND
■安全上の注意
使用コネクタ
(日本モレックス㈱製)
センサ側
相手側
ハウジング
ハウジング
43020-0600
43025-0600
ターミナル
ターミナル
43031-0010
43030-0007
備考1. 相手側コネクタはお客様にてご用意ください。
2. ACサーボモータを使用する場合、原点信号はエンコ
ーダのC相またはZ相を使用してください。
■使用上の注意
表7 取付面の精度
■取付面の加工精度
形式
精密位置決めテーブルの精度や性能は、相手取
付面の精度により影響を受けます。したがって、
要求する運動性能や位置決め精度などの使用条件
に応じて、取付面の加工精度を考慮する必要があ
ります。
表7に一般的な使用条件のときの相手取付面の
平面度の目安を示します。
また、テーブルが取り付けられる架台は大きな
反力を受けますので、架台の剛性にも十分配慮し
てください。
・接地端子は、必ず接地(第3種接地)してください。感電、火災の原因となります。
・機器に表示された電源電圧以外では使用しないでください。火災、故障の原因となります。
・濡れた手で電装品類にさわらないでください。感電の原因となります。
・コードは、無理に曲げたり、ねじったり、ひっぱったり、加熱したり、重いものをのせたりしないで
ください。感電、火災の原因となります。
・テーブルの運転中は、開口部に指などを入れないでください。けがの原因となります。
・テーブルの運転中は、可動部に触れないでください。けがの原因となります。
・電装部のカバーを外す時は、必ず電源を切り電源プラグを抜いてください。感電の原因となります。
・電源を切った後5分間は端子に触れないでください。残留電圧により感電の原因となります。
・接続端子を着脱する時は、必ず電源を切り、電源プラグを抜いてから行ってください。感電や火災の
原因となります。
単位 μm
取付面の平面度
TX
TM
TS・CT
LT…M
NT…V・NT
SP
TSLH…M
TU
TSL…M
TC
LT
TSLB
8
10
15
30
50
・精密位置決めテーブルは精密機械ですので、過大な荷重や衝撃を与えますと、精度低下や部品破損な
どの原因となりますので、取扱いには十分注意してください。
・テーブル取付面には、ごみや有害な突起などがないことを確認してください。
・精密位置決めテーブルに組み込まれている直動案内機器とボールねじにはグリースが塗布されていま
すので、内部にごみなどの混入のないように防じんを行ってください。もし、ごみが混入してしまっ
た場合には汚れたグリースを十分除去し、清浄なグリースを再塗布してください。
・精密位置決めテーブルの潤滑は、使用条件によって異なりますが、一般的には6ヶ月ごとに、長い距
離を常に往復運動する用途などでは3ヶ月ごとに古いグリースを拭き取り、清浄なグリースを再塗布
してください。
・精密位置決めテーブルは高精度な加工及び組立調整を行っていますので、分解や改造などはしないで
ください。
■固定ねじの締付トルク
精密位置決めテーブルを固定するための一般的な締付トルクを表8に示します。急加速や急減速が頻
繁に加わる場合やモーメントが負荷する場合には、表の値の1.3倍程度のトルクで締め付けることを推奨
します。また、振動や衝撃がなく高い精度が必要なときは、表の値よりも小さなトルクで締め付け、ね
じの緩み止めのために接着剤を併用することを推奨します。
表8 ねじの締付トルク
単位 N・m
めねじ部材
ねじの呼び
M2×0.4
M3×0.5
M4×0.7
M5×0.8
M6×1
M8×1.25
M10×1.25
鉄
0.31
1.7
4.0
7.9
13.3
32.0
62.7
アルミニウム合金
ヘリサートあり
鉄の数値の約60%
鉄の数値の約80%
注
(1) NT…V、NTの締付トルクは1.1N・mを推奨します。
38
39
42
108
TSL M
TSLH
M・CTLH
《高精密シリーズ》 TX・CTX
M
126
146
162
《マイクロテーブルシリーズ》 TM
186
194
206
214
リニアモータテーブル LT M LT M
ナノリニア NT V・NT NT V・NT
258
268
292
302
アライメントステージ モジュール形 SA M・AM
アライメントステージ ダイレクトドライブ形 SA DE
40
310
324
精密昇降テーブル TZ
338
ピエゾステージ SP
344
41
TUの特長
《 TUシリーズ》
1
新発想の U 字形トラックレールを採用
U 字形トラックレールの採用で、モーメントやねじりに対する剛性が大幅に向上。トラックレールを
機械・装置の構造部材として使用することも可能で、設計の自由度が広がります。
2
スライドテーブルは高精度・高剛性な一体構造
TU 《TU シリーズ》
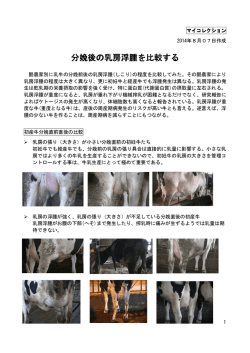
TU
精密位置決めテーブル TU
スライドテーブルは直動案内機器と一体構造になっており、大径の鋼球が 2 条列にバランス良く配
置され軌道と4 点で接触する構造のため、変動荷重や複合荷重が作用する使用用途でも、高剛性で
精密位置決めテーブル TU は、U 字形のトラックレールの内側にスライドテーブルを配置した、コンパクト
高精度な位置決めが可能。
でスリムな位置決めテーブルです。
スライドテーブルは直動案内機器と一体構造になっており、大径の鋼球が 2 条列に配置され軌道と4 点で
接触する構造のため、方向や大きさが変動する負荷荷重や複合荷重が作用する使用用途でも安定した高い
精度と剛性が得られます。また、U 字形のトラックレールを採用することで、トラックレールのモーメントや
ねじりに対する剛性も大幅に向上しています。
3
必要な機能・性能を呼び番号で指定するだけの簡単オーダー
充実したサイズバリエーションと豊富なオプション群の中から、必要な機能・性能を呼び番号で指定
するだけで、簡単に用途に合わせた最適な位置決めテーブルを構成することができます。
精密位置決めテーブル TU は、トラックレール幅 25mm〜 130mmまで 8 種類の大きさがあり、スライド
テーブルの長さを選択することができます。また、ボールねじの種類とリード、モータの種類、センサの取
付けなどの各種仕様が設定できるので、用途に合わせて最適な位置決めテーブルを構成することができます。
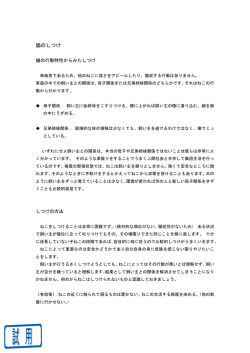
モータ
モータアタッチメント
ボールねじ
スライドテーブル
トラックレール
電装システム
センサレール
精密位置決めテーブル TU の構造
42
43
今すぐ必要な機能・性能を、呼び番号で指定するだけの簡単オーダー
精密位置決めテーブル TU
用途に合わせて 2 種類の形状から選択することができ、同一断面形状で、ショート、スタンダード、ロングの 3
種類の長さのスライドテーブルが用意されています。 また、フランジ付きテーブルは、ブリッジカバーや XY ブラ
潤滑剤を含浸させた C ルーブを取り付けることで、ボールねじや直動案内機器のグリースアップなどのメンテ
ナンスを大幅に削減することが可能です。
ケットを取り付けることができます。
TU 《TU シリーズ》
■ C ルーブ付きテーブル
■ スライドテーブルの形状と長さ
■ モータ折返し仕様
モータ折返し仕様のテーブルは、テーブルの全長
を短くすることで、省スペース化を図ることが可能
です。
ショート、スタンダード、ロング
フランジ付き
ショート、スタンダード、ロング
■ ブリッジカバー付き
モータ折返し仕様のテーブルは、テーブルの全長
を短くすることで、省スペース化を図ることが可能
■ スライドテーブルの個数
です。
負荷荷重やモーメントの大きさに応じて、トラッ
クレールに組み込むスライドテーブルの数を 2 個
にすることができます。
■ ジャバラ付きテーブル
テーブル内部への異物の侵入を防止するジャバラ
付きテーブルをシリーズ化。
■ モータの種類
ステッピングモータと ACサーボモータを選択できます。また、立軸で使用する場合には、ブレーキ付きモータ
を指定することもできます。
■ 黒色クロム皮膜処理
■ ボールねじの種類とリード
スライドテーブルやボールねじの表面に黒色の浸
透性皮膜を形成することで、耐食性を向上させます。
要求される精度に応じて、転造ねじと研削ねじから選択することができます。また、ボールねじのリードも選択
できます。ボールねじなしの仕様は、2 軸並列使用の従動側直動案内機器として使用することができます。
■ センサの指定
オーバランセンサや原点センサなどの各種センサの取付けを指定することができます。
■ XYブラケット
XY ブラケットがシリーズ化されているので、用途に応じて容易にXYテーブルを構成することができます。
電装システム
44
45
呼び番号
●
3 大きさ
●
TU 86
FG 89 A / Y029 G 10 S 0 0 R
形式記号
Q
25、30、40、50、60、86、100、130
適用:表1
表1 スライドテーブルの形状の適用
大きさ
●
1 形式
●
TU…C
−
−
○
○
○
○
−
−
TU125
TU130
TU140
TU150
TU160
TU186
TU100
TU130
●
2 スライドテーブルの形状
●
寸法
●
3 大きさ
●
部品記号
●
4 トラックレール長さ
●
●
5 スライドテーブルの個数
●
モータ記号
TU…S
○
○
○
○
○
○
○
○
●
4 トラックレール長さ
●
TU…FG
−
−
−
−
○
○
−
−
スライドテーブルの個数を指定します。
●
9 ボールねじのリード
●
表2.1
カバー記号
トラックレール長さ
単位[表示]cm、寸法mm
大きさ
●
10 カバー仕様
●
TU125
TU130
TU140
TU150
TU160
TU186
TU100
TU130
センサ記号
●
11 センサ仕様
●
表面処理記号
●
12 表面処理仕様
●
モータ折返し記号
●
13 モータ折返し仕様
●
[[13]1130
[[14]1140
[[18]1180
[[22]1220
[[29]1290
[[49]1490
[101]1010
[101]1010
[[16]1165
[[18]1180
[[24]1240
[[30]1300
[[39]1390
[[59]1590
[116]1160
[116]1160
[[20]1200
[[22]1220
[[30]1300
[[38]1380
[[49]1490
[[69]1690
[131]1310
[131]1310
トラックレール長さの[表示]と寸法
−
−
−
−
−
−
−
[[26]1260 [[30]1300 [[34]1340
−
−
−
−
[[36]1360 [[42]1420
−
−
−
−
−
[[46]1460 [[54]1540 [[62]1620 [[70]1700
−
−
−
[[59]1590 [[69]1690 [[79]1790 [[99]1990 [119]1190
−
−
[[79]1790 [[89]1890 [[99]1990 [109]1090 [119]1190 [139]1390 [159]1590
[146]1460
−
−
−
−
−
−
[146]1460 [161]1610
−
−
−
−
−
備考1 ストローク長さは72ページ以降の寸法表をご参照ください。
2 モータ折返し仕様の場合は、表2.2をご参照ください。
Cルーブ記号
表2.2
●
14 Cルーブ仕様
●
トラックレール長さ(モータ折返し仕様)
大きさ
TU140
TU150
TU160
TU186
形式記号
TU
:精密位置決めテーブルTU
[14]140
[18]180
[24]244
[44]442
[20]200
[26]260
[34]344
[54]542
単位[表示]cm、寸法mm
トラックレール長さの[表示]と寸法
[26]260 [32]320 [38]380
−
−
−
[34]340 [42]420 [50]500 [58]580 [
[66]
1660
−
[44]444 [54]544 [64]644 [74]744
−
−
1042 [114]
1142
[64]642 [74]742 [84]842 [94]942 [104]
備考 ストローク長さは84ページ以降の寸法表をご参照ください。
C :ショートテーブル
S :スタンダードテーブル
G :ロングテーブル
FC:フランジ付きショートテーブル
F :フランジ付きスタンダードテーブル
FG:フランジ付きロングテーブル
電装システム
46
TU…F
○
○
○
○
○
○
○
○
S:1個
C:2個
●
5 スライドテーブルの個数
●
●
8 ボールねじの種類
●
適用:表1
形式記号
TU…FC
−
−
−
−
○
○
−
−
トラックレール長さをcm単位で指定します。
適用:表2.1、表2.2
ボールねじ記号
●
2 スライドテーブルの形状
●
TU…G
−
−
○
○
○
○
−
−
部品記号
●
6 モータの有無
●
●
7 モータの種類
●
●
1 形式
●
TU 《TU シリーズ》
寸法
呼び番号の配列例
47
センサ記号
●
6 モータの有無
●
無記号:モータなし
A:モータ付き
お客様にてモータをご用意いただく場合には、モータなし(無記号)としてください。
●
11 センサ仕様
●
無記号:モータアタッチメントなし
ACサーボモータをご指定の場合は356ページをご参照ください。
ステッピングモータをご指定の場合は364ページをご参照ください。
●
7 モータの種類
●
センサの個数とセンサを固定するためのセンサレールの有無を指定します。
6 のモータの有無の指定をモータなし(無記号)とした場合
●
・モータ記号を選択すると、各モータに適用するモータアタッチメントとカップリングを取り付けて納入されます。
・無記号を選択すると、モータアタッチメントとカップリングはなしで納入されます。(仕様は、105〜107ページにより
ますが、TU40、TU50についてはACサーボモータ用になります。
)
ボールねじ記号
ボールねじ仕様MP.61
●
8 ボールねじの種類
●
適用:表3
無記号:転造ねじ
G:研削ねじ
TU125
TU130
TU140
TU150
TU160
TU186
TU100
TU130
ボールねじ
の種類
研削ねじ
研削ねじ
研削ねじ
転造ねじ
研削ねじ
転造ねじ
研削ねじ
転造ねじ
研削ねじ
研削ねじ
研削ねじ
モータ折返し記号
4、5、8、10、20、25
●
13 モータ折返し仕様
●
ボールねじのリード mm
適用:表4
TU
4
○
−
○
−
−
−
−
−
−
−
−
5
−
○
−
○
○
○
(1)
○
−
−
−
−
8
−
−
○
−
−
−
−
−
−
−
−
10
−
−
−
○
○
○
○
(1)
(2)
○
(2)
○
−
−
20
−
−
−
−
−
−
○
(1)
○
(2)
○
○
−
25
−
−
−
−
−
−
−
−
−
−
○
注
(1) トラックレール長さ990mmと1190mmには適用されません。
(2) トラックレール長さ1390mmと1590mmには適用されません。
(3) トラックレール長さ750mmには適用されません。
カバー記号
●
10 カバー仕様
●
●
12 表面処理仕様
●
無記号:処理なし
R :黒色クロム皮膜処理1
スライドテーブルとトラックレールの表面に黒色クロム皮膜処理を施します。
L :黒色クロム皮膜処理2
黒色クロム皮膜処理1に加えて、ボールねじ軸及びナットにも処理を施します。
表面処理仕様を指定します。
表面に黒色の浸透性膜を形成することにより、耐食性を向上させます。
表3 ボールねじリードの適用
大きさ
表面処理記号
N:ボールねじなし
Nを指定の場合
6 、●
7 、●
9 、●
13 の項は無記号としてください。
・●
11 のセンサ仕様の指定は、センサなし(0を指定)としてください。
・●
10 の項でジャバラ付きを指定することはできません。
・●
●
9 ボールねじのリード
●
センサ仕様MP.66
0 :センサなし、センサレールなし
2 :センサ2個(リミット)
、センサレール付き
3 :センサ3個(リミット、原点前)、センサレール付き
4 :センサ4個(リミット、原点前、原点)
、センサレール付き
9 :センサなし、センサレール付き
TU 《TU シリーズ》
モータ記号
カバー仕様MP.65
0 :カバーなし
C :ブリッジカバー付き(TU…FC、TU…F、TU…FGに適用)
J :ジャバラ付き(TU60S、TU86Sに適用)
モータ折返し仕様MP.65
無記号:モータ折返しなし
U
:モータ上方向折返し
S
:モータ下方向折返し
M
:モータ右方向折返し
H
:モータ左方向折返し
T
:モータ折返しユニットなし
モータ折返し仕様(U、S、M、Hを指定)の場合
6 のモータの有無の指定はモータ付き(Aを指定)としてください。
・●
・大きさ60、86はACサーボモータのみ適用します。
モータ折返しユニットなし(Tを指定)の場合
6 、●
7 の項は無記号としてください。
・●
表4 モータ折返し仕様の適用
大きさ
TU125
TU130
TU140
TU150
TU160
TU186
TU100
TU130
モータ折返し仕様
(1)
ACサーボモータ
ステッピングモータ
−
−
○
○
○
○
−
−
−
−
○
○
−
−
−
−
モータ折返しユニットなし(2)
−
−
○
○
○
○
−
−
注(1) 記号U、S、M、Hに適用します。
(2) 記号 T に適用します。
ジャバラ付き(Jを指定)の場合
5 のスライドテーブルの個数は1個(Sを指定)としてください。
・●
TU60のトラックレール長さ1190mmとTU86のトラックレール長さ1590mmはブリッジカバー付きはありません。
電装システム
48
49
諸特性
●
14 Cルーブ仕様
●
適用:表5
表6 TUの精度(転造ねじ)
無記号:Cルーブなし
Q
:Cルーブ付きテーブル
トラックレール長さ
スライドユニットとボールねじのナットの端面にCルーブを取り付けます。Cルーブは、連通多孔焼結樹脂に多量の潤滑油を
含浸させた潤滑部品です。トラックレールやボールねじの軌道面と接触して摺動することで、プレート内部の潤滑油が常時
適量しみ出して軌道面に供給されるので、給油間隔の延長によるメンテナンス工数の削減が可能です。給油のしづらい箇所
でのグリース消失対策に有効です。
Qを指定の場合
8 のボールねじの種類の指定は、研削ねじ(Gを指定)又はボールねじなし(Nを指定)としてください。
・●
表5 Cルーブの適用
大きさ
TU125
TU130
TU140
TU150
TU160(1)
TU186(2)
TU100
TU130
1
転造ねじ
研削ねじ
ボールねじなし
−
−
−
−
−
−
−
−
−
−
○
○
○
○
○
○
−
−
○
○
○
○
○
○
注
( ) TU60のトラックレール長さ990mmと1190mmは、Cルーブ付きはありません。
にお問い合わせください。
(2) TU86のトラックレール長さ1390mmと1590mmについては
を超え
以下
−
500
800
500
800
1200
単位
TU 《TU シリーズ》
■精度
Cルーブ記号
mm
繰返し
位置決め精度
テーブル運動の
平行度B
バックラッシ
(1)
±0.025
(±0.040)
0.015
0.020
0.025
0.050
注(1) モータ折返し仕様のテーブルには、適用しません。
備考1. ( )内の値は、モータ折返し仕様のテーブルに適用します。
2. モータ折返し仕様のテーブルの精度は、タイミングベルトの張力が適正に調整されている場合に適用します。
表7 TUの精度(研削ねじ)
トラックレール長さ
を超え
以下
繰返し位置決め精度
単位
位置決め精度(1)
mm
テーブル運動の平行度B
1
ショート
スタンダードテーブル ショート
スタンダードテーブル ショート
スタンダードテーブル バックラッシ( )
テーブル
ロングテーブル
テーブル
ロングテーブル
テーブル
ロングテーブル
−
400( 350)
400( 350) 500( 500)
500( 500) 600( 550)
600( 550) 700( 700)
700( 700) 800( 800)
800( 800) 900( 900) ±0.004
±0.002
900( 900)1000(1000)
(±0.020) (±0.020)
1000(1000)1100(1100)
1100(1100) 1200
1200
1400
1400
1500
1500
1610
0.030
0.020
0.035
0.025
0.040
0.030
0.045
0.035
0.015
0.008
0.010
0.020
0.012
0.014
0.050
−
−
−
0.003
0.025
0.016
0.040
0.045
0.050
−
−
−
0.030
注(1) モータ折返し仕様のテーブルには、適用しません。
備考1. ( )内の値は、モータ折返し仕様のテーブルに適用します。
2. モータ折返し仕様のテーブルの精度は、タイミングベルトの張力が適正に調整されている場合に適用します。
電装システム
50
51
表9.1
表9.2
最高速度(ACサーボモータ)
モータの
種類
大きさ
TU
TU
TU
TU
25
30
40
50
TU 60
ACサーボ
モータ
TU 86
TU100
TU130
最高速度(ステッピングモータ)
モータの
種類
最高速度 mm/s
トラックレール
長さ
mm
モータ
回転数
r/min
リード
2mm
リード
4mm
リード
5mm
リード
8mm
リード
10mm
リード
20mm
リード
25mm
200以下
340以下
−
−
690以下
790
990
1190
790以下
890
990
1090
1190
1390
1590
1010
1160
1310
1460
1010
1160
1310
1460
1610
3000
3000
3000
3000
3000
2910
1940
1290
3000
2760
2180
1770
1460
1610
1200
3000
2320
1780
1400
2690
2690
2190
1720
1390
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
200
−
200
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
250
−
250
250
243
162
108
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
400
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
500
500
485
323
215
500
460
363
295
243
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
1000
0970
−
−
1000
0920
0727
0590
0487
0537
0400
1000
0773
0593
0467
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
1121
1121
0913
0717
0579
大きさ
TU
TU
TU
TU
25
30
40
50
TU 60
ステッピング
モータ
TU 86
TU100
TU130
最高速度 mm/s
トラックレール
長さ
mm
モータ
回転数
r/min
リード
2mm
リード
4mm
リード
5mm
リード
8mm
リード
10mm
リード
20mm
リード
25mm
200以下
340以下
−
−
790以下
990以下
1190
990以下
1090
1190
1390
1590
1160以下
1310
1460
1310以下
1460
1610
1800
1800
1800
1800
1800
1800
1290
1800
1770
1460
1610
1200
1800
1780
1400
1800
1720
1390
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
120
−
120
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
150
−
150
−
150
108
−
−
−
−
−
−
−
−
−
−
−
−
−
240
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
300
−
300
215
300
295
243
−
−
−
−
−
−
−
−
−
−
−
−
0600
−
−
0600
0590
0487
0537
0400
0600
0593
0467
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
0750
0717
0579
TU 《TU シリーズ》
■最高速度
備考 標準モータを使用した時の値です。実際の最高速度は使用モータや負荷条件などに応じた運転パターンの検討が必要です。
備考 標準モータを使用した時の値です。実際の最高速度は使用モータや負荷条件などに応じた運転パターンの検討が必要です。
電装システム
52
53
表10.2 最大搭載質量
単位 kg
ボールねじ スライド 高さ寸法
ボールねじ
のリード テーブル
H
大きさ
の種類
mm
mm
の長さ
表10.1 最大搭載質量
L
ショート
H
搭載質量W
05
スタンダード
ロング
研削ねじ
単位 kg
ボールねじ スライド 高さ寸法
ボールねじ
のリード テーブル
H
大きさ
の種類
mm
mm
の長さ
TU25
TU30
研削ねじ
研削ねじ
4
5
スタンダード
スタンダード
ショート
4
スタンダード
ロング
TU40
研削ねじ
ショート
8
スタンダード
ロング
0
100
200
300
400
500
600
800
1000
0
200
400
17
3.8
2.1
1.3
1.1
0.90
0.68
0.62
0.56
―
―
―
―
―
―
―
―
―
―
―
―
―
―
―
―
―
―
600
0
1.5
21
0.76
1.9
0.50
1.0
―
0.69
―
0.52
―
―
―
―
―
―
―
―
200
400
600
4.5
2.5
1.7
1.5
1.2
1.0
0.89
0.78
0.70
0.63
0.58
0.53
―
―
―
―
―
―
―
―
―
―
―
―
―
―
―
7.8
5.6
4.2
3.5
2.8
2.5
2.2
2.0
1.7
1.6
1.5
1.4
1.1
1.0
―
―
4.3
3.4
11
2.9
2.5
6.0
2.2
2.0
4.1
1.8
1.6
3.1
1.5
1.4
2.5
1.3
1.2
2.1
1.0
1.0
1.6
―
―
1.3
0
200
58
13
400
600
0
7.5
5.2
87
200
400
25
15
8.9
7.2
5.3
4.7
3.8
3.5
2.9
2.7
2.4
2.3
2.0
1.9
1.5
1.5
1.2
1.2
600
0
200
10
120
44
6.0
15
13
4.2
8.2
7.5
3.2
5.6
5.3
2.6
4.3
4.1
2.1
3.4
3.3
1.8
2.9
2.8
1.4
2.2
2.1
1.2
1.7
1.7
400
600
0
26
19
37
11
9.6
5.4
6.9
6.3
2.9
5.0
4.7
2.0
3.9
3.7
1.5
3.2
3.1
1.2
2.7
2.6
1.0
2.1
2.0
―
1.7
1.6
―
5.7
3.1
3.1
2.1
2.1
1.6
1.6
1.3
1.3
1.1
1.1
―
―
―
―
―
―
―
600
0
200
2.1
46
11
1.6
8.1
5.3
1.3
4.4
3.4
1.1
3.0
2.5
―
2.3
2.0
―
1.8
1.6
―
1.5
1.4
―
1.2
1.1
―
―
―
400
600
6.1
4.2
3.9
3.0
2.8
2.3
2.2
1.9
1.8
1.6
1.5
1.4
1.3
1.2
1.0
1.0
―
―
11
8.3
6.4
6.1
5.1
4.4
4.2
3.7
3.3
3.2
2.9
2.6
2.6
2.4
2.2
2.1
2.0
1.9
1.6
1.5
1.5
1.3
1.3
1.2
5.1
3.8
3.0
2.4
2.1
1.8
1.4
1.2
600
46
20
11
7.8
備考1. 各大きさの最高速度、加減速時間0.2sで連続運転した時に、ボールねじ又は直動案内機器の定格寿命が18000時間とな
る質量を基準に算出しています。
2. 搭載質量の位置が数値の記入されていない欄にあてはまる場合は、
にお問い合わせください。
54
10
スタンダード
ロング
TU50
ショート
05
スタンダード
ロング
転造ねじ
ショート
10
スタンダード
ロング
400
600
0
100
200
300
400
500
600
800
1000
75
17
13
8.4
6.9
5.5
4.8
4.0
3.6
3.2
2.9
2.6
2.5
2.3
1.9
1.7
1.5
1.4
6.2
4.9
4.5
3.7
3.5
3.0
2.8
2.5
2.4
2.2
2.1
1.9
1.6
1.5
1.3
1.3
9.8
6.8
0
200
400
130
39
23
21
16
12
11
9.6
8.3
7.7
6.9
6.2
5.8
5.4
5.0
4.7
4.4
4.2
4.0
3.7
3.6
3.0
2.9
2.8
2.4
2.3
2.3
600
0
200
16
140
71
10
29
24
7.3
16
14
5.7
11
10
4.6
8.2
7.8
3.9
6.6
6.4
3.4
5.6
5.4
2.6
4.2
4.1
2.2
3.4
3.3
400
600
43
31
20
17
13
12
9.4
8.8
7.4
7.0
6.1
5.8
5.2
5.0
4.0
3.9
3.2
3.2
0
200
400
44
7.4
4.0
8.4
4.4
2.9
4.6
3.1
2.3
3.2
2.4
1.9
2.4
1.9
1.6
2.0
1.6
1.4
1.7
1.4
1.2
1.2
1.1
1.0
1.0
―
―
600
0
2.8
44
2.2
15
1.8
8.0
1.6
5.5
1.4
4.2
1.2
3.4
1.1
2.8
―
2.1
―
1.7
200
400
600
17
9.6
6.6
9.0
6.4
4.9
6.0
4.8
3.9
4.5
3.8
3.2
3.6
3.1
2.7
3.0
2.7
2.4
2.5
2.3
2.1
2.0
1.8
1.7
1.6
1.5
1.4
0
200
44
33
21
15
12
9.5
8.0
6.9
6.1
5.5
4.9
4.5
4.1
3.8
3.1
2.9
2.5
2.4
400
600
0
19
13
75
11
8.9
13
7.9
6.7
6.9
6.1
5.4
4.8
4.9
4.5
3.6
4.1
3.8
2.9
3.6
3.3
2.5
2.8
2.6
1.9
2.3
2.2
1.5
200
400
17
9.8
8.4
6.2
5.5
4.5
4.0
3.5
3.2
2.8
2.6
2.4
2.3
2.1
1.7
1.6
1.4
1.3
600
0
200
6.8
120
39
4.9
21
16
3.7
11
9.6
3.0
7.7
6.9
2.5
5.8
5.4
2.2
4.7
4.4
1.9
4.0
3.7
1.5
3.0
2.9
1.3
2.4
2.3
400
600
23
16
12
10
8.3
7.3
6.2
5.7
5.0
4.6
4.2
3.9
3.6
3.4
2.8
2.6
2.3
2.2
0
200
400
120
71
43
29
24
20
16
14
13
11
10
9.4
8.2
7.8
7.4
6.6
6.4
6.1
5.6
5.4
5.2
4.2
4.1
4.0
3.4
3.3
3.2
600
0
200
31
45
7.4
17
8.4
4.4
12
4.6
3.1
8.8
3.2
2.4
7.0
2.4
1.9
5.8
2.0
1.6
5.0
1.7
1.4
3.9
1.2
1.1
3.2
1.0
―
400
600
4.0
2.8
2.9
2.2
2.3
1.8
1.9
1.6
1.6
1.4
1.4
1.2
1.2
1.1
1.0
―
―
―
0
200
400
47
17
9.6
15
9.0
6.4
8.0
6.0
4.8
5.5
4.5
3.8
4.2
3.6
3.1
3.4
3.0
2.7
2.8
2.5
2.3
2.1
2.0
1.8
1.7
1.6
1.5
600
0
6.6
47
4.9
21
3.9
12
3.2
8.0
2.7
6.1
2.4
4.9
2.1
4.1
1.7
3.1
1.4
2.5
200
400
600
33
19
13
15
11
8.9
9.5
7.9
6.7
6.9
6.1
5.4
5.5
4.9
4.5
4.5
4.1
3.8
3.8
3.6
3.3
2.9
2.8
2.6
2.4
2.3
2.2
備考1. 各大きさの最高速度、加減速時間0.2sで連続運転した時に、ボールねじ又は直動案内機器の定格寿命が18000時間とな
る質量を基準に算出しています。
2. 搭載質量の位置が数値の記入されていない欄にあてはまる場合は、
にお問い合わせください。
55
電装システム
200
400
0
200
400
ショート
長さ寸法 L
mm
0
200
長さ寸法 L
mm
TU 《TU シリーズ》
■最大搭載質量
単位 kg
ボールねじ スライド 高さ寸法
ボールねじ
のリード テーブル
H
大きさ
の種類
mm
mm
の長さ
ショート
05
スタンダード
ロング
ショート
TU60
研削ねじ
10
スタンダード
ロング
ショート
20
スタンダード
ロング
長さ寸法 L
mm
0
100
200
300
400
500
600
800
1000
19
13
11
8.5
7.3
6.3
5.6
5.0
4.5
4.1
3.8
3.5
2.9
2.7
2.3
2.2
7.0
5.9
5.4
4.8
4.4
4.0
3.7
3.4
3.2
3.0
2.5
2.4
2.1
2.0
17
15
13
12
11
9.7
9.0
8.4
7.8
7.3
6.9
6.5
6.1
5.8
5.5
4.6
4.5
4.3
3.7
3.6
3.5
16
47
39
11
25
23
8.9
18
16
7.2
13
13
6.1
11
10
5.3
9.1
8.8
4.1
6.9
6.7
3.4
5.5
5.4
75
54
34
29
21
19
15
15
12
12
10
9.6
8.5
8.2
6.5
6.4
5.3
5.2
0
200
400
58
12
6.4
13
6.9
4.7
7.1
4.9
3.6
4.9
3.7
3.0
3.8
3.0
2.5
3.0
2.6
2.2
2.6
2.2
1.9
1.9
1.7
1.6
1.6
1.4
1.3
600
0
4.4
58
3.5
22
2.9
12
2.5
8.5
2.2
6.5
1.9
5.2
1.7
4.4
1.4
3.3
1.2
2.7
200
400
600
27
15
11
14
10
7.8
9.4
7.5
6.2
7.0
5.9
5.1
5.6
4.9
4.3
4.6
4.2
3.7
4.0
3.6
3.3
3.1
2.9
2.7
2.5
2.4
2.2
0
200
58
57
34
25
19
16
13
12
9.9
9.0
8.0
7.4
6.8
6.3
5.1
4.9
4.1
3.9
400
600
0
33
23
29
19
15
7.3
13
12
3.9
10
9.1
2.7
8.2
7.5
2.0
6.9
6.4
1.6
5.9
5.6
1.4
4.6
4.4
1.0
3.8
3.6
―
0
200
100
27
400
600
16
11
0
200
400
160
61
36
31
24
19
600
0
200
25
160
120
400
600
9.7
7.7
200
400
4.8
2.6
3.2
2.0
2.4
1.7
1.9
1.4
1.6
1.3
1.4
1.1
1.2
1.0
―
―
―
―
600
0
200
1.8
29
11
1.5
14
7.1
1.3
7.9
5.1
1.1
5.5
4.0
1.0
4.2
3.3
―
3.4
2.8
―
2.8
2.4
―
2.1
1.9
―
1.7
1.6
400
600
6.2
4.3
4.7
3.5
3.8
3.0
3.1
2.5
2.7
2.2
2.3
2.0
2.1
1.8
1.7
1.5
1.4
1.3
24
14
9.6
13
9.5
7.3
9.1
7.2
5.9
6.9
5.8
4.9
5.6
4.9
4.2
4.7
4.2
3.7
3.6
3.3
3.0
2.9
2.7
2.5
7.3
5.9
5.0
4.3
3.8
3.3
2.7
2.3
0
200
400
600
29
25
14
9.5
表10.4 最大搭載質量
単位 kg
ボールねじ スライド 高さ寸法
ボールねじ
のリード テーブル
H
大きさ
の種類
mm
mm
の長さ
ショート
05
スタンダード
ロング
TU60
転造ねじ
ショート
10
スタンダード
ロング
長さ寸法 L
mm
0
100
200
300
400
500
600
800
1000
19
13
11
8.5
7.3
6.3
5.6
5.0
4.5
4.1
3.8
3.5
2.9
2.7
2.3
2.2
7.0
5.9
5.4
4.8
4.4
4.0
3.7
3.4
3.2
3.0
2.5
2.4
2.1
2.0
17
15
13
12
11
9.7
9.0
8.4
7.8
7.3
6.9
6.5
6.1
5.8
5.5
4.6
4.5
4.3
3.7
3.6
3.5
16
47
39
11
25
23
8.9
18
16
7.2
13
13
6.1
11
10
5.3
9.1
8.8
4.1
6.9
6.7
3.4
5.5
5.4
75
54
34
29
21
19
15
15
12
12
10
9.6
8.5
8.2
6.5
6.4
5.3
5.2
0
200
400
46
12
6.4
13
6.9
4.7
7.1
4.9
3.6
4.9
3.7
3.0
3.8
3.0
2.5
3.0
2.6
2.2
2.6
2.2
1.9
1.9
1.7
1.6
1.6
1.4
1.3
600
0
4.4
46
3.5
22
2.9
12
2.5
8.5
2.2
6.5
1.9
5.2
1.7
4.4
1.4
3.3
1.2
2.7
200
400
600
27
15
11
14
10
7.8
9.4
7.5
6.2
7.0
5.9
5.1
5.6
4.9
4.3
4.6
4.2
3.7
4.0
3.6
3.3
3.1
2.9
2.7
2.5
2.4
2.2
0
200
46
46
34
25
19
16
13
12
9.9
9.0
8.0
7.4
6.8
6.3
5.1
4.9
4.1
3.9
400
600
33
23
19
15
13
12
10
9.1
8.2
7.5
6.9
6.4
5.9
5.6
4.6
4.4
3.8
3.6
0
200
100
27
400
600
16
11
0
200
400
140
61
36
31
24
19
600
0
200
25
140
120
400
600
9.7
7.7
TU 《TU シリーズ》
表10.3 最大搭載質量
備考 各大きさの最高速度、加減速時間0.2sで連続運転した時に、ボールねじ又は直動案内機器の定格寿命が18000時間となる
質量を基準に算出しています。
備考1. 各大きさの最高速度、加減速時間0.2sで連続運転した時に、ボールねじ又は直動案内機器の定格寿命が18000時間とな
る質量を基準に算出しています。
2. 搭載質量の位置が数値の記入されていない欄にあてはまる場合は、
にお問い合わせください。
電装システム
56
57
単位 kg
ボールねじ スライド 高さ寸法
ボールねじ
のリード テーブル
H
大きさ
の種類
mm
mm
の長さ
ショート
10
スタンダード
ロング
研削ねじ
ショート
20
スタンダード
ロング
TU86
ショート
10
スタンダード
ロング
転造ねじ
ショート
20
スタンダード
ロング
58
0
100
200
300
400
500
600
800
1000
33
19
19
13
13
10
10
8.4
8.4
7.1
7.1
6.1
5.4
4.8
4.3
4.0
13
9.8
10
8.1
7.0
6.0
6.1
5.3
5.4
4.8
4.3
3.9
3.6
3.4
150
93
55
68
47
35
39
31
26
27
23
20
21
19
17
17
15
14
14
13
12
11
10
9.6
8.8
8.3
7.9
600
0
200
39
150
140
28
86
64
22
49
41
18
34
30
15
26
24
13
21
20
11
18
17
9.0
14
13
7.5
11
11
400
600
82
59
49
40
35
30
27
24
22
20
18
17
16
15
12
12
10
9.7
0
200
400
56
13
7.1
19
8.8
5.6
11
6.6
4.7
7.4
5.3
4.0
5.6
4.5
3.5
4.6
3.8
3.1
3.8
3.4
2.8
2.9
2.6
2.3
2.3
2.1
2.0
600
0
4.9
56
4.1
45
3.6
26
3.2
18
2.9
14
2.6
11
2.4
9.6
2.0
7.3
1.8
5.9
200
400
600
41
23
16
25
17
13
18
14
11
14
11
9.2
11
9.4
8.1
9.6
8.2
7.1
8.3
7.2
6.4
6.5
5.9
5.3
5.4
4.9
4.5
0
200
56
56
56
35
34
25
24
19
18
15
15
13
9.5
8.6
7.6
7.1
400
600
0
35
25
120
25
19
33
19
16
19
15
13
13
13
11
10
11
9.9
8.4
9.8
8.8
7.1
7.9
7.2
5.4
6.6
6.1
4.3
200
400
31
18
19
13
13
10
10
8.3
8.4
7.0
7.1
6.1
6.1
5.4
4.8
4.3
4.0
3.6
600
0
200
12
120
93
9.8
68
47
8.1
39
31
6.9
27
23
6.0
21
19
5.3
17
15
4.8
14
13
3.9
11
10
3.4
8.8
8.3
400
600
55
39
35
28
26
22
20
18
17
15
14
13
12
11
9.6
9.0
7.9
7.5
0
200
400
120
120
82
86
64
49
49
41
35
34
30
27
26
24
22
21
20
18
18
17
16
14
13
12
600
0
200
59
48
13
40
19
8.8
30
11
6.6
24
7.4
5.3
20
5.6
4.5
17
4.6
3.8
15
3.8
3.4
12
2.9
2.6
9.7
2.3
2.1
5.6
4.1
4.7
3.6
4.0
3.2
3.5
2.9
3.1
2.6
2.8
2.4
2.3
2.0
2.0
1.8
0
200
130
31
400
600
18
12
0
200
400
400
600
7.1
4.9
8.3
6.9
12
11
表10.6 最大搭載質量
単位 kg
ボールねじ スライド 高さ寸法
ボールねじ
のリード テーブル
H
大きさ
の種類
mm
mm
の長さ
TU100
TU130
研削ねじ
研削ねじ
20
25
スタンダード
スタンダード
長さ寸法 L
mm
0
100
200
300
400
500
600
800
1000
0
200
80
61
65
37
38
27
27
21
21
17
17
14
14
12
11
9.7
8.7
8.0
400
600
35
25
26
20
20
16
17
14
14
12
12
11
11
9.6
8.7
7.9
7.3
6.8
0
200
400
90
66
38
84
44
30
51
33
24
36
26
20
28
22
18
23
19
16
19
16
14
15
13
11
12
11
9.7
600
27
22
19
17
15
13
12
10
8.8
備考1. 各大きさの最高速度、加減速時間0.2sで連続運転した時に、ボールねじ又は直動案内機器の定格寿命が18000時間とな
る質量を基準に算出しています。
2. 搭載質量の位置が数値の記入されていない欄にあてはまる場合は、
にお問い合わせください。
11
11
10
0
200
400
48
41
23
45
25
17
26
18
14
18
14
11
14
11
9.4
11
9.6
8.2
9.6
8.3
7.2
7.3
6.5
5.9
5.9
5.4
4.9
600
0
16
48
13
48
11
34
9.2
24
8.1
18
7.1
15
6.4
12
5.3
9.5
4.5
7.6
200
400
600
48
35
25
35
25
19
25
19
16
19
15
13
15
13
11
13
11
9.9
11
9.8
8.8
8.6
7.9
7.2
7.1
6.6
6.1
各大きさの最高速度、加減速時間0.2sで連続運転した時に、ボールねじ又は直動案内機器の定格寿命が18000時間となる
質量を基準に算出しています。
電装システム
備考
長さ寸法 L
mm
TU 《TU シリーズ》
表10.5 最大搭載質量
59
■ボールねじの仕様
表11 直動案内部の定格荷重
大きさ
TU125
TU130
TU140
TU150
TU160
TU186
TU100
TU130
スライドテーブル
の長さ
表12 ボールねじ仕様
基本動定格荷重 基本静定格荷重
C
C0
N
N
1770
2280
6050
8410
11200
8930
13500
18400
12400
18800
26800
24100
41400
49900
54600
70300
スタンダード
スタンダード
ショート
スタンダード
ロング
ショート
スタンダード
ロング
ショート
スタンダード
ロング
ショート
スタンダード
ロング
スタンダード
スタンダード
2840
3810
6110
9780
14700
8800
15800
24600
12000
21600
35900
23800
51500
67300
68500
88800
1
静定格モーメント
( ) N・m
T0
TX
大きさ
ボールねじ
の種類
TU125
TU130
研削ねじ
研削ねじ
TU140
研削ねじ
TY
8.4
(0045.0)
10.1
(0053.7)
20.3
(0040.6)
14.2
(0073.4)
16.9
(0087.5)
34.9
(0069.8)
22.8
(0185.0)
22.8
(0185.0)
83.8
(0167.6)
53.0
(0351.0)
53.0
(0351.0)
134.0
(0268.0)
(0649.0)
(0649.0) 113.0
201.0
(0402.0) 113.0
39.5
(0315.0)
39.5
(0315.0)
156.0
(0312.0)
(0711.0)
(0711.0) 114.0
280.0
(0560.0) 114.0
(1420.0)
(1420.0) 260.0
436.0
(0872.0) 260.0
62.7
(0486.0)
62.7
(0486.0)
236.0
(0472.0)
(1150.0)
(1150.0) 181.0
425.0
(0850.0) 181.0
(2470.0)
(2470.0) 472.0
708.0
(1416.0) 472.0
(1280.0) 183.0
(1280.0)
677.0
(1354.0) 183.0
(4120.0)
(4120.0) 764.0
1470.0
(2940.0) 764.0
(6290.0) 1270.0
1920.0
(3840.0) 1270.0
(6290.0)
(6460.0)
(6460.0) 1210.0
2230.0
(4460.0) 1210.0
(9630.0) 1830.0
(9630.0)
3920.0
(7840.0) 1830.0
転造ねじ
TU150
研削ねじ
転造ねじ
TU160
研削ねじ
(1)
転造ねじ
(2 )
TU186
注
(1) 下図の方向の値で、( )内の値はスライドユニット2個密着の時の値です。
研削ねじ
3
T0
TX
TY
TU100
TU130
研削ねじ
()
研削ねじ
研削ねじ
リード
ねじ外径
軸方向すきま
mm
mm
mm
4
5
4
8
5
10
5
10
5
10
5
10
20
10
20
10
20
20
20
25
6
8
0.005以下
0.005以下
8
0.005以下
10
0.05以下
10
0.005以下
12
0.05以下
12
0.005以下
15
0.05以下
15
0.005以下
20
20
25
0.005以下
0.005以下
0.005以下
基本動定格荷重
C
N
基本静定格荷重
C0
N
950
1080
2290
1450
2300
1850
2730
1720
2800
1800
3230
2300
2300
4900
3900
6080
4510
6620
6960
10100
1630
2160
3575
2155
4800
3200
4410
2745
5000
3200
6320
3920
3920
9100
5050
12500
7840
12600
13000
20000
TU 《TU シリーズ》
■直動案内部の仕様
注(1) トラックレール長さ990mmと1190mmには適用されません。
(2) トラックレール長さ1390mmと1590mmには適用されません。
(3) トラックレール長さ1390mmと1590mmに使用するボールねじです。
電装システム
60
61
■テーブルイナーシャと起動トルク
表13 トラックレールの断面2次モーメント
表14.1 TUのテーブルイナーシャと起動トルク
大きさ
トラックレール
長さ
mm
テーブルイナーシャ J T(3) ×10−5kg・m2
スタンダードテーブル
リード 4mm
TU 25
130
165
200
大きさ
トラックレール
長さ
mm
0.018
0.021
0.024
テーブルイナーシャ J T(3) ×10−5kg・m2
TU 30
140
180
220
260
300
340
大きさ
トラックレール
長さ(1)
mm
Y軸
e
X軸
重心点
e
mm
断面2次モーメント mm4
大きさ
!X
!Y
2
3
7.5×10
1.7×104
6.8×104
1.7×105
3.8×105
1.6×106
3.3×106
8.8×106
1.4×105
3.1×105
3.7×10
9.3×102
1.0×104
2.8×104
6.4×104
2.4×105
5.9×105
1.4×106
1.4×104
3.9×104
TU125
TU130
TU140
TU150
TU160
TU186
TU100
TU130
TU50E
TU60E
2.6
3.3
6.6
8.7
10.9
14.6
18.8
23.0
6.7
8.8
TU 40
大きさ
TU 50
10
180(
240(
300(
360(
420(
140)
200)
260)
320)
380)
トラックレール
長さ(1)
mm
220(
300(
380(
460(
540(
620(
700(
180)
260)
340)
420)
500)
580)
660)
S
TU
40
50
TU
6
S
60
荷重
TU
4
大きさ
TU 60
500
1000
荷重
1500
2000
N
2
起動トルク T(
0 )
N・m
スタンダードテーブル
リード 5mm
研削ねじ
0.057
0.069
0.082
0.095
0.107
0.120
3
−5
2
テーブルイナーシャ J(
T ) ×10 kg・m
ショートテーブル
リード
リード
4mm
8mm
0.05
0.07
0.09
0.11
0.13
0.07
0.09
0.11
0.13
0.15
スタンダードテーブル
リード
リード
4mm
8mm
0.06
0.08
0.10
0.12
0.13
0.09
0.11
0.12
0.14
0.16
0.02
ロングテーブル
リード
リード
4mm
8mm
−
0.08
0.10
0.12
0.14
−
0.12
0.14
0.16
0.18
3
−5
2
テーブルイナーシャ J(
T ) ×10 kg・m
ショートテーブル
スタンダードテーブル
ロングテーブル
リード
リード
リード
リード
リード
リード
5mm
10mm
5mm
10mm
5mm
10mm
0.17
0.23
0.29
0.35
0.41
0.47
0.54
0.21
0.28
0.34
0.40
0.46
0.52
0.58
0.18
0.24
0.30
0.36
0.43
0.49
0.55
0.27
0.33
0.39
0.45
0.51
0.57
0.63
−
0.26
0.32
0.38
0.44
0.51
0.57
−
0.40
0.46
0.53
0.59
0.65
0.71
トラックレール
長さ(1)
リード
mm
5mm
2
起動トルク T(
0 )
N・m
研削ねじ
0.06
(0.065)
2
起動トルク T(
0 )
N・m
転造ねじ
研削ねじ
0.08
0.08
(0.085)
2
起動トルク T(
0 )
N・m
研削ねじ
リード
10mm
リード
20mm
リード
5mm
リード
10mm
リード
20mm
リード
5mm
リード
10mm
リード
20mm
0.53
0.69
0.85
1.0
1.2
1.3
1.7
2.0
1.03
1.19
1.34
1.50
1.66
1.82
−
−
0.47
0.62
0.78
0.94
1.1
1.3
1.6
1.9
0.61
0.77
0.93
1.1
1.2
1.4
1.7
2.1
1.43
1.59
1.75
1.90
2.06
2.22
−
−
0.49
0.65
0.81
0.97
1.1
1.3
1.6
1.9
0.71
0.87
1.0
1.2
1.3
1.5
1.8
2.2
1.94
2.10
2.26
2.41
2.57
2.73
−
−
転造
ねじ
290(
390(
490(
590(
690(
790(
990
1190
244)
344)
444)
544)
644)
744)
0.45
0.60
0.76
0.92
1.1
1.2
1.6
1.9
リード
リード
05mm
20mm
10mm
0.10
0.12 0.16
(0.13)
(0.20)
0.10
−
1
注( ) ( )内の値は、モータ折返し仕様のトラックレール長さを示します。
(2) スライドテーブルを2個使用する場合は約1.5倍に、モータ折返し仕様のテーブルは約2倍になります。
( )内の値は、
Cルーブ仕様の起動トルクを示します。
(3) モータ折返し仕様の場合、表中の数値に下記の値を加算してください。
TU40及びTU50:0.28×10−5kg・m2、TU60:1.5×10−5kg・m2
63
電装システム
図1 下方向荷重−変位特性
62
0.02
6S
TU8
2
0
研削ねじ
3
−5
2
テーブルイナーシャ J(
T ) ×10 kg・m
ショートテーブル
スタンダードテーブル
ロングテーブル
S
変位量
μm
8
2
起動トルク T(
0 )
N・m
TU 《TU シリーズ》
■トラックレールの断面2次モーメント
モータ折返し仕様・カバー仕様
大きさ
トラックレール
長さ(1)
mm
TU 86
490( 442)
590( 542)
690( 642)
790( 742)
890( 842)
990( 942)
1090(1042)
1190(1142)
1390
1590
3
−5
2
テーブルイナーシャ J(
T ) ×10 kg・m
ショートテーブル
スタンダードテーブル
ロングテーブル
リード
リード
リード
リード
リード
リード
10mm
20mm
10mm
20mm
10mm
20mm
2.1
2.4
2.8
3.2
3.6
4.0
4.4
4.8
−
−
2.9
3.2
3.6
4.0
4.4
4.8
5.2
5.6
18
20
2.3
2.7
3.1
3.5
3.9
4.2
4.6
5.0
−
−
3.9
4.3
4.6
5.0
5.4
5.8
6.2
6.6
19
21
2.4
2.8
3.2
3.6
4.0
4.4
4.8
5.1
−
−
−5
2
大きさ
トラックレール
長さ
mm
テーブルイナーシャ J T ×10 kg・m
スタンダードテーブル
リード20mm
TU100
1010
1160
1310
1460
15
17
19
20
大きさ
トラックレール
長さ
mm
テーブルイナーシャ J T ×10−5kg・m2
スタンダードテーブル
リード25mm
TU130
1010
1160
1310
1460
1610
39
43
48
52
57
4.4
4.8
5.1
5.5
5.9
6.3
6.7
7.1
19
22
2
起動トルク T(
0 )
N・m
転造ねじ
研削ねじ
0.16
0.16
(0.20)
−
0.30
精密位置決めテーブルTUは、モータ折返し仕様を用意していますので、モータを折り返してテーブル
の全長を短くすることで、省スペース化を図ることが可能です。モータ折返し仕様の寸法は、各寸法表
をご参照ください。
トラックレール長さの設定がモータ折返しなしのテーブルと異なるので注意が必要です。
モータ折返しユニットなしのテーブルは、モータ折返し仕様のテーブルから、モータ折返しユニット
を取り外したものです。モータ折返しユニットなし仕様の寸法は106ページの寸法表をご参照ください。
モータ上方向折返し
(記号:U)
TU 《TU シリーズ》
■モータ折返し仕様
表14.2 TUのテーブルイナーシャと起動トルク
モータ左方向折返し
(記号:H)
2
起動トルク T(
0 )
N・m
研削ねじ
0.30
(0.36)
モータ下方向折返し
(記号:S)
2
起動トルク T(
0 )
N・m
注
(1)( )内の値は、モータ折返し仕様のトラックレール長さを示します。
(2) スライドテーブルを2個使用する場合は約1.5倍に、モータ折返し仕様のテーブルは約2倍になります。(
Cルーブ仕様の起動トルクを示します。
(3) モータ折返し仕様の場合、表中の数値に下記の値を加算してください。
TU86:1.5×10−5kg・m2
モータ右方向折返し
(記号:M)
研削ねじ
0.60
(0.70)
)内の値は、
■カバー仕様
精密位置決めテーブルTUは、防じん対策としてブリッジカバーとジャバラを用意しています。
ジャバラ付きテーブルの寸法は、92ページ以降の寸法表をご参照ください。
64
電装システム
ブリッジカバー付テーブル
ジャバラ付テーブル
65
センサ仕様
表15.2 センサのタイミングチャート(TU、モータ折返し仕様)
TU 《TU シリーズ》
表15.1 センサのタイミングチャート(TU、モータ折返しなし)
CW CCW
CCW CW
A
B
ON
原点
OFF
原点前
C
OFF
ストローク長さ
OFF
A
CCWリミット
B
CWリミット
メカストッパ
D
E
大きさ
スライドテーブルの
長さ
ボールねじの
リード
TU 25
TU 30
スタンダード
スタンダード
4
5
4
8
4
8
4
8
5
10
5
10
5
10
5
10
20
5
10
20
5
10
20
10
20
10
20
10
20
20
25
ショート
TU 40
スタンダード
ロング
ショート
TU 50
スタンダード
ロング
ショート
TU 60
スタンダード
ロング
ショート
TU 86
スタンダード
ロング
TU100
TU130
スタンダード
スタンダード
単位
A
B
C
50
50
2
3
2
6
2
6
2
6
3
7
3
7
3
7
3
7
14
3
7
14
3
7
14
7
14
7
14
7
14
14
18
10
10
85
85
85
85
85
85
110
130
100
105
100
105
105(2)
105
105
150
160
1
D( )
8.4( 6.5)
10.9( 6.4)
7.5( 5.5)
mm
10
8
8
4.5( 7.5)
8
7.2( 6.2)
3.8
8.2( 7.2)
8
4.2( 3.2)
8
9 ( 8.5)
20
20
20
13 (14
12 (14
13 (14
12 (14
13 (14
12 (14
22 (19
18 (23
)
(3)
)
)
)
)
)
)
)
CWリミット
CCWリミット
E
※モータ折返し仕様のテーブルは、スライドテーブルのCW方向とCCW方向の移動が逆になります。
4.5
8
9.6( 9.6)
OFF
メカストッパ
D
スライドテーブルの
長さ
ショート
TU40
スタンダード
ロング
ショート
TU50
スタンダード
10.4
ロング
9.6(14.6)
20
原点前
E
10.5( 8.5)
14.6(19.6)
OFF
ストローク長さ
OFF
大きさ
10
原点
8
ショート
8
TU60
11
4
スタンダード
ロング
11
ショート
11
TU86
20
20
スタンダード
ロング
ボールねじの
リード
4
8
4
8
4
8
5
10
5
10
5
10
5
10
20
5
10
20
5
10
20
10
20
10
20
10
20
A
45
45
45
45
45
45
64
84
59
59
62
62
62
B
2
6
2
6
2
6
3
7
3
7
3
7
3
7
14
3
7
14
3
7
14
7
14
7
14
7
14
C
単位
1
D( )
E
7.5
( 5.5)
10
10
mm
4.5
10.5
( 8.5)
8
4.5
( 7.5)
8
7.2
( 6.2)
3.8
8.2
( 7.2)
8
4.2
( 3.2)
8
14.6(19.6)
10.4
9.6
(14.6)
20
20
9.6
( 9.6)
8
9 ( 8.5)
8
13 (14
12 (14
13 (14
12 (14
13 (14
12 (14
)
)
)
)
)
)
11
4
11
11
電装システム
注
(1)( )内の値は、スライドテーブルの個数が2個の場合の寸法を示します。
(2) トラックレール長さ1390mmと1590mmの場合は110mmです。
(3) トラックレール長さ1390mmと1590mmの場合は7
(9)mmです。
備考1. センサの取付けは呼び番号で指定します。
2. 各センサの仕様については総合解説のセンサ仕様の項をご参照ください。
3. ジャバラ付きテーブルの場合は、表中の値は適用しません。
4. Cルーブ付きテーブルの場合は、表15.3をご参照ください。
66
C
ON
1
注( )( )内の値は、スライドテーブルの個数が2個の場合の寸法を示します。
備考1. センサの取付けは呼び番号で指定します。
2. 各センサの仕様については総合解説のセンサ仕様の項をご参照ください。
3. ジャバラ付きテーブルの場合は、表中の値は適用しません。
4. Cルーブ付きテーブルの場合は、表15.4をご参照ください。
67
表15.4 センサのタイミングチャート(TU、モータ折返し仕様、Cルーブ付き)
TU 《TU シリーズ》
表15.3 センサのタイミングチャート(TU、モータ折返しなし、Cルーブ付き)
CW CCW
CCW CW
A
B
ON
原点
OFF
原点前
C
OFF
ストローク長さ
OFF
A
CCWリミット
B
CWリミット
メカストッパ
D
E
大きさ
スライドテーブルの
長さ
ボールねじの
リード
TU 25
TU 30
スタンダード
スタンダード
4
5
4
8
4
8
4
8
5
10
5
10
5
10
5
10
20
5
10
20
5
10
20
10
20
10
20
10
20
20
25
ショート
TU 40
スタンダード
ロング
ショート
TU 50
スタンダード
ロング
ショート
TU 60
スタンダード
ロング
ショート
TU 86
スタンダード
ロング
TU100
TU130
スタンダード
スタンダード
単位
A
B
C
50
50
2
3
2
6
2
6
2
6
3
7
3
7
3
7
3
7
14
3
7
14
3
7
14
7
14
7
14
7
14
14
18
10
10
100
100
100
100
100
100
120
140
100
115
100
105
130
105
105
150
160
1
D( )
mm
10
8
8
7.5( 5.5)
9
5.5( 8.5)
9
9.5( 7.5)
9
7.2( 6.2)
8
8.2( 7.2)
8
9.2( 8.2)
8
9.6( 9.6)
5.4
4.6( 9.6)
8
9.6( 4.6)
5.4
20
20
20
4( 4
8 (14
7 (14
13 ( 9
12 ( 9
8( 9
7( 9
17 (14
18 (23
)
)
)
)
)
)
)
)
)
OFF
CWリミット
CCWリミット
メカストッパ
D
E
※モータ折返し仕様のテーブルは、スライドテーブルのCW方向とCCW方向の移動が逆になります。
スライドテーブルの
長さ
ショート
TU40
スタンダード
ロング
ショート
スタンダード
ロング
4( 9 )
原点前
E
8.4( 6.5)
10.9( 6.4)
TU50
20
OFF
ストローク長さ
OFF
大きさ
10
原点
ショート
8
TU60
19
9
スタンダード
ロング
11
ショート
11
TU86
20
20
スタンダード
ロング
ボールねじの
リード
4
8
4
8
4
8
5
10
5
10
5
10
5
10
20
5
10
20
5
10
20
10
20
10
20
10
20
A
60
60
60
60
60
60
75
94
60
69
60
59
90
60
60
B
2
6
2
6
2
6
3
7
3
7
3
7
3
7
14
3
7
14
3
7
14
7
14
7
14
7
14
10
20
20
mm
D( )
E
7.5(5.5)
9
5.5(8.5)
9
9.5(7.5)
9
7.2(6.2)
8
8.2(7.2)
8
9.2(8.2)
8
8.6(8.6)
6.4
9.6(9.6)
5.4
8.6(3.6)
9
9.6(4.6)
5.4
8 (3 )
9
C
10
単位
1
4
10
9
10
9
5
4
(4
(6
(6
(6
(6
(6
(6
)
)
)
)
)
)
)
8
22
12
9
9
電装システム
注
(1)( )内の値は、スライドテーブルの個数が2個の場合の寸法を示します。
備考1. センサの取付けは呼び番号で指定します。
2. 各センサの仕様については総合解説のセンサ仕様の項をご参照ください。
3. ジャバラ付きテーブルの場合は、表中の値は適用しません。
68
C
ON
1
注( )( )内の値は、スライドテーブルの個数が2個の場合の寸法を示します。
備考1. センサの取付けは呼び番号で指定します。
2. 各センサの仕様については総合解説のセンサ仕様の項をご参照ください。
3. ジャバラ付きテーブルの場合は、表中の値は適用しません。
69
組合せ例
■XYブラケット
精密位置決めテーブルTUは、XYブラケットを使用して多彩な2軸組合せを構成することができます。
XYブラケットは軽量なアルミニウム合金製で、フランジ付きスタンダードテーブルに組み付けることが
できます。表16にXYブラケットの形式を示します。ご要望の際は表中の呼び番号でご指示ください。
4-M1ヘリサート2D
4-φd1
φd2深ざぐり深h1
W4
L4
H3
W3
表16 2軸組合せの構成とXYブラケットの形式
L5
H
H5
ブラケットを使用しないでも可能な組合せ
H2
XYブラケットによる組合せ
TU 《TU シリーズ》
表17.1 XYブラケットの寸法
Y軸
12
H4
H1
XYブラケット
L1
W2
W1
X軸
L3
L2
L
W
単位 mm
W
TAE0412-BR 90
TAE0413-BR 90
TAE0414-BR 90
呼び番号
XYブラケットの
呼び番号
X軸
Y軸
XYブラケットの
呼び番号
−
−
TU40F
TU50F
TU50F
TU60F
TU60F
TU86F
TU86F
−
−
−
TU40
TU40
TU50
TU50
TU60
TU60
TU86
−
−
−
TAE0412-BR
TAE0413-BR
TAE0414-BR
TAE0415-BR
TAE0409-BR
TAE0410-BR
TAE0411-BR
−
TU 25F
TU 30F
−
−
−
−
−
TU 86F
TU 86F
TU130F
TU 25
TU 30
−
−
−
−
−
TU 60
TU 86
TU100
不要
不要
−
−
−
−
−
不要
不要
不要
H2 H3
18 11
18 11
25 12.5
H4
27
27
27
H5 L
40 48
40 51
50 57
L1
7
9
9
L2 L3 L4 L5
18 23 36 12
25 17 39 12
25 23 45 12
L5
L6
M1 d1 d2 h1
M3 4.5 8 4.5
M3 4.5 8 4.5
M4 4.5 8 4.5
表17.2 XYブラケットの寸法
4-M1ヘリサート2D
W4
W3
L4
H7
Y軸
H
H1
67 38
67 38
77 39.5
4-φd1
φd2深ざぐり深h1
W2
W1
H6
H4
H1
H
X軸
W1 W2 W3 W4
55 17.5 60 15
65 12.5 60 15
65 12.5 80 5
H3
X軸
H2
Y軸
L1
L2
W
L3
L
単位 mm
TAE0415-BR
TAE0409-BR
TAE0410-BR
TAE0411-BR
70
W
114
114
114
114
W1
74
74
100
100
W2
20
20
7
7
W3
80
100
100
100
W4 H
17 70
7 80
7 80
7 106
H1
32.5
36
36
40
H2
25
28
28
46
H3
12.5
16
16
20
H4
20
20
20
20
H6
15
15
15
15
H7
55
65
65
91
L
52.4
52.4
70
73
L1
12.2
12.2
12
13.5
L2
28
28
46
46
L3
12.2
12.2
12
13.5
L4
19.2
19.2
25
26.5
L5
15
15
20
20
L6
18.2
18.2
25
26.5
M1
M4
M5
M5
M6
d1 d2
5.5 9.5
5.5 9.5
6.6 11
6.6 11
h1
5.5
5.5
6.5
6.5
71
電装システム
呼び番号
精密位置決めテーブルTU<TUシリーズ>
精密位置決めテーブルTU<TUシリーズ>
TU30
A-A断面寸法
A-A断面寸法
28
20
67
6.7
25
1.6
12.4
8 9
24.9
4-M3深4
2×n1-φ2.9
φ4.8深ざぐり深1.6
(精密機器用十字穴付きなべ小ねじM2.5用)
39(2個密着時中心間寸法)
20
21
2×n1-φ2.9
φ5深ざぐり深2.7
TU25S
43
35
28
14.9
9 12
29.9
4-M3深5.5
TU30S
20
12
48
40
33
S
1.8
TU30F
A
20
20
25
46
L1
40
29.5
31
16
A 35
(31)
35
28.6
14.9
9 12
29.9
8
A
24.5
25
2-M2.5深5(1)
両面加工
3.5
3.5
40
4-M2.5深5
40
(38)
A 35
51
L1
センサ付き
センサ付き
注
(1) TU25Fにはねじ穴がありません。
(2) 104ページのモータ部寸法表をご参照ください。
注(1) TU30Fにはねじ穴がありません。
(2) 104ページのモータ部寸法表をご参照ください。
寸法
単位
大きさ
TU25S
TU25F
トラックレール長さ
全長
L1
L
ストローク長さ
S(1)
n1
130
165
200
130
165
200
165
200
235
165
200
235
130(−)
165(45)
100
(80)
130(−)
165(45)
100
(80)
3
4
5
3
4
5
スライドテーブル
質量
kg
0.05
0.07
mm
寸法
単位
2
質量( )
kg
0.31
0.34
0.38
0.33
0.36
0.40
大きさ
TU30S
TU30F
トラックレール長さ
全長
L1
L
ストローク長さ
S(1)
n1
140
180
220
260
300
340
140
180
220
260
300
340
175
215
255
295
335
375
175
215
255
295
335
375
130( − )
170(145)
110
(185)
150
(125)
190
(165)
230
(205)
130( − )
170(145)
110
(185)
150
(125)
190
(165)
230
(205)
3
4
5
6
7
8
3
4
5
6
7
8
スライドテーブル
質量
kg
0.09
0.12
mm
2
質量( )
kg
0.49
0.56
0.63
0.70
0.77
0.84
0.52
0.59
0.66
0.73
0.80
0.87
注(1) リミットセンサを取り付けた場合に許容できるストローク長さを示します。( )内の値はスライドテーブル2個密着の
時の寸法です。
(2) スライドテーブル1個の時のテーブル全体の質量を示します。モータの質量は含まれていません。
備考 トラックレールとケーシングの材質は、ステンレス鋼です。
73
電装システム
注
(1) リミットセンサを取り付けた場合に許容できるストローク長さを示します。( )内の値はスライドテーブル2個密着の
時の寸法です。
(2) スライドテーブル1個の時のテーブル全体の質量を示します。モータの質量は含まれていません。
備考 トラックレールとケーシングの材質は、ステンレス鋼です。
72
25
22
8
4-M3深6
12.4
8 9
24.9
TU25F
35
4-M2.5深5
2-M2.5深4(1)
両面加工
S
6.7
30
1.6
2-M3深6
11
11
9
8.7
30
24
16
67
h(2)LM(2)
8.7
35
31(2個密着時中心間寸法)
16
21
L
h(2) LM(2)
1.8
L
TU 《TU シリーズ》
TU25
精密位置決めテーブルTU<TUシリーズ>
9
L
L6(2個密着時中心間寸法)
25
L3
L2
大きさ
L2
L3
L4
L6
L7
n3
n4
TU40C
TU40S
TU40G
TU40F
−
−
18
−
−
18
34
18
19.5
31.5
47.5
31.5
45
60
75
60
43
55
71
55
−
−
4
−
2
4
4
4
0.1
0.2
0.3
0.3
トラックレール
長さ
L1
2×n1-φ3.4
φ6.5深ざぐり深3.1
S
L4
(1)
2-M3深5
75
180
240
300
360
420
6
10
両面加工
30
(L7)
60
H(2)
(43)
28.5
39.5
5
A
mm
質量
kg
トラックレール寸法
W(2)
n3-M3深5
LM(2)
n4-M4深6
15
58
単位
全長
L
186
246
306
366
426
単位
ストローク長さ S
(1)
n1
3
4
5
6
7
TU40C
45
(−)
105
( 70)
165
(130)
225
(190)
285
(250)
TU40S
TU40G
TU40C
TU40F
30( − ) −
(−)
0.9
90( 40) 80
(−)
1.1
150(100) 140
( 70)
1.2
210(160) 200
(130)
1.4
270(220) 260
(190)
1.6
TU 《TU シリーズ》
スライドテーブル寸法
TU40
mm
質量(2) kg
TU40S
TU40G
TU40F
1.0
1.2
1.3
1.5
1.7
−
1.3
1.4
1.6
1.8
1.1
1.3
1.4
1.6
1.8
注(1) リミットセンサを取り付けた場合に許容できるストローク長さを示します。( )内の値はスライドテーブル2個密着の
時の寸法です。
(2) スライドテーブル1個の時のテーブル全体の質量を示します。モータの質量は含まれていません。
30
A
L1
A-A断面寸法
64
55
45
TU40C、TU40S、TU40G
31
45
18
40
19
1.9
19
1.9
40
15
35
22
18
40
TU40F
61
センサ付き
電装システム
注
(1) TU40Fにはねじ穴がありません。
(2) 104ページのモータ部寸法表をご参照ください。
74
75
精密位置決めテーブルTU<TUシリーズ>
L
L6(2個密着時中心間寸法)
25
9
L3
L2
n3-M4深6
15
LM(2)
単位
大きさ
L2
L3
L4
L6
L7
n3
質量
kg
TU50C
TU50S
TU50G
TU50F
−
25
25
25
−
−
45
−
23.8
42.8
66.8
42.8
55
75
100
75
51
70
94
70
2
4
8
4
0.2
0.4
0.7
0.5
58
トラックレール寸法
トラックレール
長さ
L1
220
300
380
460
540
620
700
2×n1-φ4.5
φ8深ざぐり深4.1
S
L4
10
(1)
2-M3深5
6
75
両面加工
全長
L
226
306
386
466
546
626
706
単位
ストローク長さ S
(1)
n1
3
4
5
6
7
8
9
TU50C
80
(−)
160
(115)
240
(195)
320
(275)
400
(355)
480
(435)
560
(515)
TU50S
TU50F
60( − )
140( 75)
220(155)
300(235)
380(315)
460(395)
540(475)
mm
質量(2) kg
TU50G
TU50C
TU50S
TU50G
TU50F
−
(−)
120
(−)
200
(110)
280
(190)
360
(270)
440
(350)
520
(430)
1.6
1.9
2.3
2.7
3.1
3.5
3.8
1.8
2.1
2.5
2.9
3.3
3.7
4.0
−
2.4
2.8
3.2
3.6
3.9
4.3
1.9
2.2
2.6
3.0
3.4
3.8
4.1
注(1) リミットセンサを取り付けた場合に許容できるストローク長さを示します。( )内の値はスライドテーブル2個密着の
時の寸法です。
(2) スライドテーブル1個の時のテーブル全体の質量を示します。モータの質量は含まれていません。
30
A
L1
H(2)
35
(L7)
80
(53)
5
A
49.5
30
mm
TU 《TU シリーズ》
スライドテーブル寸法
TU50
A-A断面寸法
74
65
55
25
50
TU50C、TU50S、TU50G
41
25
1.9
25
1.9
50
55
15
41
25
25
50
TU50F
71
センサ付き
電装システム
注
(1) TU50Fにはねじ穴がありません。
(2) 104ページのモータ部寸法表をご参照ください。
76
77
精密位置決めテーブルTU<TUシリーズ>
スライドテーブル寸法
L
8
L6(2個密着時中心間寸法)
n3-M5深8
70
E1
L3
L2
38
LM(3)
単位
大きさ
L2
L3
L4
L5
L6
L7
n3
E
E1
TU60C
TU60S
TU60G
TU60FC
TU60F
TU60FG
−
28
28
−
28
28
−
−
60
−
−
60
27.4
52.4
83
27.4
52.4
83
17.4
18
44
−
−
−
65
90
120.5
65
90
120.5
58
83
113
58
83
113
2
4
8
2
4
8
90
80
80
90
80
80
15
10
10
15
10
10
0.3
0.6
1.0
0.4
0.8
1.3
トラックレール寸法
トラックレール
長さ
2×n1-φ5.5
φ9.5深ざぐり深5.4
L1
L4
L5
S
M4深6
(1)
(2)
E
M4深6
(1)
8
両面加工
両面加工
A
(L7)
100
35
L1
H(3)
42
55
(64)
59.5
6
A
mm
質量
kg
290
390
490
590
690
790
990
1190
全長
L
298
398
498
598
698
798
998
1198
単位
TU 《TU シリーズ》
<ボールねじリード5mm、10mm>
TU60
mm
S
(1)
質量(2) kg
TU60C
TU60S
TU60G
TU60C TU60S TU60G TU60FC TU60F TU60FG
TU60FC
TU60F
TU60FG
110
( 50) 100( − ) 70( − ) 3.0
3.3
3.6
3.1
3.5
3.9
210
(150) 200(120) 170( 60) 3.7
4.0
4.4
3.8
4.2
4.7
310
(250) 300(220) 270(160) 4.5
4.8
5.1
4.6
4.9
5.4
410
(350) 400(320) 370(260) 5.2
5.5
5.8
5.3
5.7
6.1
510
(450) 500(420) 470(360) 6.0
6.2
6.6
6.1
6.4
6.9
610
(550) 600(520) 570(460) 6.7
7.0
7.3
6.8
7.2
7.6
810
(750) 800(720) 770(660) 8.3
8.6
9.0
8.4
8.7
9.1
1010
(950)1000(920) 970(860) 9.8
10.1
10.5
9.9
10.2
10.6
ストローク長さ
n1
3
4
5
6
7
8
10
12
注(1) リミットセンサを取り付けた場合に許容できるストローク長さを示します。( )内の値はスライドテーブル2個密着の
時の寸法です。
(2) スライドテーブル1個の時のテーブル全体の質量を示します。モータの質量は含まれていません。
<ボールねじリード20mm>
スライドテーブル寸法
A-A断面寸法
86
74
64
28
60
28
60
TU60C、TU60S、TU60G
TU60FC、TU60F、TU60FG
50
80
センサ付き
mm
大きさ
L2
L3
L4
L5
L6
L7
n3
E
E1
質量
kg
TU60C
TU60S
TU60G
TU60FC
TU60F
TU60FG
−
28
28
−
28
28
−
−
60
−
−
60
27.4
52.4
83
27.4
52.4
83
17.4
18
44
−
−
−
65
90
120.5
65
90
120.5
58
83
113
58
83
113
2
4
8
2
4
8
110
85
85
110
85
85
15
15
15
15
15
15
0.3
0.6
1.0
0.4
0.8
1.3
トラックレール寸法
トラックレール
長さ
L1
290
390
490
590
690
790
全長
L
298
398
498
598
698
798
単位
mm
S
(1)
質量(2) kg
TU60S
TU60G
TU60C TU60S TU60G TU60FC TU60F TU60FG
TU60F
TU60FG
95( − ) 65( − ) 3.1
3.4
3.7
3.2
3.6
4.0
195(115) 165( − ) 3.8
4.1
4.5
3.9
4.3
4.8
295(215) 265(155) 4.6
4.9
5.2
4.7
5.0
5.5
395(315) 365(255) 5.3
5.6
5.9
5.4
5.8
6.2
495(415) 465(355) 6.1
6.3
6.7
6.2
6.5
7.0
595(515) 565(455) 6.8
7.1
7.4
6.9
7.3
7.7
ストローク長さ
n1
3
4
5
6
7
8
TU60C
TU60FC
95
(−)
195
(135)
295
(235)
395
(335)
495
(435)
595
(535)
注(1) リミットセンサを取り付けた場合に許容できるストローク長さを示します。( )内の値はスライドテーブル2個密着の
時の寸法です。
(2) スライドテーブル1個の時のテーブル全体の質量を示します。モータの質量は含まれていません。
79
電装システム
注
(1) TU60FC、TU60F、TU60FGにはねじ穴がありません。
(2) TU60Cはφ3深2です。
(3) 104ページのモータ部寸法表をご参照ください。
78
30
2.6
30
2.6
60
65
16
46
30
単位
精密位置決めテーブルTU<TUシリーズ>
h(4) LM(4)
L
L6(2個密着時中心間寸法)
38
n3-M6深12(1)
n4-M6深12
10
72
L3
L2
単位
大きさ
L2
L3
L4
L5
L6
L7
n3
n4
TU86C
TU86S
TU86G
TU86FC
TU86F
TU86FG
−
46
46
−
28
46
−
−
73
−
46
73
43
93
118
43
93
118
30
63
60
−
−
−
90
140
165
90
140
165
80
130
155
80
130
155
2
4
4
2
4
4
−
−
4
−
4
4
0.7
1.7
2.2
1.1
2.3
3.0
トラックレール寸法
トラックレール
長さ
2×n1-φ7
φ11深ざぐり深7
L1
85(5)
L4
S
M4深6(2)
(3)
8
M4深6(2)
L5
両面加工
8
両面加工
55
(L7)
100
A
35
L1
H(4)
(74)
49.5
69.5
A
mm
質量
kg
490
590
690
790
890
990
1090
1190
1390
1590
全長
L
498
598
698
798
898
998
1098
1198
1398
1598
単位
S
(1)
質量(2) kg
TU86C
TU86S
TU86G
TU86C TU86S TU86G TU86FC
TU86FC
TU86F
TU86FG
300( 220)250( 120) 225( 70) 9.9
10.9
11.4
10.3
400( 320)350( 220) 325( 170)10.8
11.7
12.2
11.2
500( 420)450( 320) 425( 270)12.3
13.2
13.8
12.7
600( 520)550( 420) 525( 370)13.8
14.7
15.3
14.2
700( 620)650( 520) 625( 470)15.0
15.9
16.4
15.4
800
( 720)750( 620) 725( 570)16.5
17.4
17.9
16.9
900
( 820)850( 720) 825( 670)18.0
18.9
19.4
18.4
20.4
21.0
19.9
1000
( 920)950( 820) 925( 770)19.5
1200
(1120)
1150(1020)1125( 970)24.5
25.4
25.9
24.9
1400
(1320)
1350(1220)1325(1170)27.8
28.7
29.2
28.2
TU 《TU シリーズ》
スライドテーブル寸法
TU86
mm
ストローク長さ
n1
5
6
7
8
9
10
11
12
14
16
TU86F TU86FG
11.5
12.4
13.9
15.4
16.6
18.1
19.6
21.1
26.0
29.3
12.2
13.0
14.6
16.1
17.2
18.7
20.2
21.8
26.7
30.0
注(1) リミットセンサを取り付けた場合に許容できるストローク長さを示します。( )内の値はスライドテーブル2個密着の
時の寸法です。
(2) スライドテーブル1個の時のテーブル全体の質量を示します。モータの質量は含まれていません。
A-A断面寸法
112
100
88
46
86
TU86C、TU86S、TU86G
80
TU86FC、TU86F、TU86FG
56
42
80
46
86
106
センサ付き
電装システム
注
(1)
(2)
(3)
(4)
(5)
6
6
42
70
25
56.2
46
TU86FはM5深12です。
TU86FC、TU86F、TU86FGにはねじ穴がありません。
TU86Cはφ3深2です。
104ページのモータ部寸法表をご参照ください。
TU86C、TU86FCで、トラックレール長さが1390又は1590の場合、90となります。
81
精密位置決めテーブルTU<TUシリーズ>
精密位置決めテーブルTU<TUシリーズ>
TU130
A-A断面寸法
A-A断面寸法
h(3) LM(3)
52
80
100
4-M10深20(2)
L2
45
20
110
9.4
20
88
70
h(3) LM(3)
180(2個密着時中心間寸法)
4-M8深15(2)
8
L2
45
L
65
100
65.2
50
L
155(2個密着時中心間寸法)
50
49.5
99.5
24.5
70
130
TU130S
TU100S
2×n1-φ11
φ17.5深ざぐり深10.6
24.5
79.5
58
(84)
6
A
(153.2)
150
A
A
TU100F
55
55
(178)
150
65
110
36.5
10
9.4
140
A
70
130
TU130F
55
L1
61.5
L1
74.5
55
132
34
両面加工
50
49.5
99.5
H(3)
両面加工
S
2-M4深6(1)
H(3)
10
72.5
2-M4深6(1)
8
130
34
168
150
134
99.5
111
8
S
52
90
29.5
128
115
102
(104)
2×n1-φ9
φ14深ざぐり深9
121
150
センサ付き
センサ付き
1
1
注
( ) TU100Fにはねじ穴がありません。
(2) TU100FはM6深12です。
(3) 104ページのモータ部寸法表をご参照ください。
備考 トラックレールには、M12の吊りボルト用のめねじが設けてあります。
注( ) TU130Fにはねじ穴がありません。
(2) TU130FはM8深15です。
(3) 104ページのモータ部寸法表をご参照ください。
備考 トラックレールには、M12の吊りボルト用のめねじが設けてあります。
寸法
単位
大きさ
TU100S
TU100F
全長
L1
L
ストローク長さ
S
(1)
n1
1010
1160
1310
1460
1010
1160
1310
1460
1020
1170
1320
1470
1020
1170
1320
1470
690( 550)
840( 700)
990( 850)
1140(1000)
690( 550)
840( 700)
990( 850)
1140(1000)
7
8
9
10
7
8
9
10
L2
50
2.6
46
3.7
mm
寸法
単位
2
質量( )
kg
28.0
31.6
35.1
38.8
29.1
32.7
36.2
39.9
大きさ
TU130S
TU130F
トラックレール長さ
全長
L1
L
ストローク長さ
S
(1)
n1
1010
1160
1310
1460
1610
1010
1160
1310
1460
1610
1020
1170
1320
1470
1620
1020
1170
1320
1470
1620
660( 490)
810( 640)
960( 790)
1110( 940)
1260(1090)
660( 490)
810( 640)
960( 790)
1110( 940)
1260(1090)
7
8
9
10
11
7
8
9
10
11
L2
スライドテーブル
質量
kg
70
5.4
50
7.8
mm
質量(2)
kg
45.2
50.6
56.2
61.8
67.3
47.6
53.0
58.6
64.2
69.7
注(1) リミットセンサを取り付けた場合に許容できるストローク長さを示します。( )内の値はスライドテーブル2個密着の
時の寸法です。
(2) スライドテーブル1個の時のテーブル全体の質量を示します。モータの質量は含まれていません。
83
電装システム
トラックレール長さ
スライドテーブル
質量
kg
注
(1) リミットセンサを取り付けた場合に許容できるストローク長さを示します。( )内の値はスライドテーブル2個密着の
時の寸法です。
(2) スライドテーブル1個の時のテーブル全体の質量を示します。モータの質量は含まれていません。
82
TU 《TU シリーズ》
TU100
精密位置決めテーブルTU<TUシリーズ>
L
L6(2個密着時中心間寸法)
L3
n3-M3深5
L2
n4-M4深6
27 6
28
mm
大きさ
L2
L3
L4
L6
L7
n3
n4
質量
kg
TU40C
TU40S
TU40G
TU40F
−
−
18
−
−
18
34
18
19.5
31.5
47.5
31.5
45
60
75
60
43
55
71
55
−
−
4
−
2
4
4
4
0.1
0.2
0.3
0.3
20
25
単位
TU 《TU シリーズ》
スライドテーブル寸法
TU40 モータ折返し仕様
81
LM(2)
S
L4
2-M3深5
(1)
L1
全長
L
146
206
266
326
386
単位
ストローク長さ S
(1)
n1
2
3
4
5
6
TU40C
45
(−)
105
( 70)
165
(130)
225
(190)
285
(250)
TU40S
TU40G
TU40C
TU40F
30( − ) −
(−)
1.0
90( 40) 80
(−)
1.2
150(100) 140
( 70)
1.4
210(160) 200
(130)
1.6
270(220) 260
(190)
1.8
mm
質量(2) kg
TU40S
TU40G
TU40F
1.1
1.3
1.5
1.7
1.9
−
1.4
1.6
1.8
2.0
1.2
1.4
1.6
1.8
2.0
注(1) リミットセンサを取り付けた場合に許容できるストローク長さを示します。( )内の値はスライドテーブル2個密着の
時の寸法です。
(2) スライドテーブル1個の時のテーブル全体の質量を示します。モータの質量は含まれていません。
35
10
両面加工
トラックレール
長さ
140
200
260
320
380
35
2×n1-φ3.4
φ6.5深ざぐり深3.1
136
トラックレール寸法
(L7)
30
60
3.5
39.5
28.5
50
53.5
5
A
A
50
L1
A-A断面寸法
64
55
45
TU40C、TU40S、TU40G
31
45
18
40
19
1.9
19
1.9
40
15
35
22
18
40
TU40F
61
センサ付き
電装システム
注
(1) TU40Fにはねじ穴がありません。
(2) 104ページのモータ部寸法表をご参照ください。
84
85
精密位置決めテーブルTU<TUシリーズ>
L
L6(2個密着時中心間寸法)
25
27 6
L3
L2
28
大きさ
L2
L3
L4
L6
L7
n3
質量
kg
TU50C
TU50S
TU50G
TU50F
−
25
25
25
−
−
45
−
23.8
42.8
66.8
42.8
55
75
100
75
51
70
94
70
2
4
8
4
0.2
0.4
0.7
0.5
mm
20
5
n3-M4深6
単位
トラックレール寸法
トラックレール
長さ
81
136
L1
180
260
340
420
500
580
660
35
2×n1-φ4.5
φ8深ざぐり深4.1
LM(2)
S
L4
2-M3深5
(1)
35
L
186
266
346
426
506
586
666
n1
2
3
4
5
6
7
8
TU50C
80
(−)
160
(115)
240
(195)
320
(275)
400
(355)
480
(435)
560
(515)
TU50S
TU50F
60( − )
140( 75)
220(155)
300(235)
380(315)
460(395)
540(475)
mm
質量(2) kg
TU50G
TU50C
TU50S
TU50G
TU50F
−
(−)
120
(−)
200
(110)
280
(190)
360
(270)
440
(350)
520
(430)
1.6
1.9
2.3
2.7
3.1
3.5
3.8
1.8
2.1
2.5
2.9
3.3
3.7
4.0
−
2.4
2.8
3.2
3.6
3.9
4.3
1.9
2.2
2.6
3.0
3.4
3.8
4.1
注(1) リミットセンサを取り付けた場合に許容できるストローク長さを示します。( )内の値はスライドテーブル2個密着の
時の寸法です。
(2) スライドテーブル1個の時のテーブル全体の質量を示します。モータの質量は含まれていません。
10
両面加工
全長
単位
ストローク長さ S
(1)
TU 《TU シリーズ》
スライドテーブル寸法
TU50 モータ折返し仕様
80
10
A
(L7)
30
50
60
35
49.5
5
A
70
L1
A-A断面寸法
74
65
55
25
50
TU50C、TU50S、TU50G
41
25
1.9
25
1.9
50
55
15
41
25
25
50
TU50F
71
センサ付き
電装システム
注
(1) TU50Fにはねじ穴がありません。
(2) 104ページのモータ部寸法表をご参照ください。
86
87
精密位置決めテーブルTU<TUシリーズ>
スライドテーブル寸法
L
L6(2個密着時中心間寸法)
38
n3-M5深8
31 8 28
30
L3
L2
単位
大きさ
L2
L3
L4
L5
L6
L7
n3
E
TU60C
TU60S
TU60G
TU60FC
TU60F
TU60FG
−
28
28
−
28
28
−
−
60
−
−
60
27.4
52.4
83
27.4
52.4
83
17.4
18
44
−
−
−
65
90
120.5
65
90
120.5
58
83
113
58
83
113
2
4
8
2
4
8
44
39
39
44
39
39
0.3
0.6
1.0
0.4
0.8
1.3
トラックレール寸法
100
トラックレール
長さ
172
2×n1-φ5.5
φ9.5深ざぐり深5.4
L1
42
244
344
444
544
644
744
LM(3)
S
L4
M4深6
(1)
(2)
E
M4深6
(1)
L5
55
100
89
L1
A-A断面寸法
86
74
64
16
46
30
50
65
30
2.6
30
2.6
60
28
60
TU60FC、TU60F、TU60FG
2
3
4
5
6
7
TU60C
TU60FC
110
( 50)
210
(150)
310
(250)
410
(350)
510
(450)
610
(550)
72
スライドテーブル寸法
単位
80
センサ付き
mm
大きさ
L2
L3
L4
L5
L6
L7
n3
E
質量
kg
TU60C
TU60S
TU60G
TU60FC
TU60F
TU60FG
−
28
28
−
28
28
−
−
60
−
−
60
27.4
52.4
83
27.4
52.4
83
17.4
18
44
−
−
−
65
90
120.5
65
90
120.5
58
83
113
58
83
113
2
4
8
2
4
8
64
39
39
64
39
39
0.3
0.6
1.0
0.4
0.8
1.3
トラックレール
長さ
L1
244
344
444
544
644
744
全長
L
252
352
452
552
652
752
単位
mm
S
(1)
質量(2) kg
TU60S
TU60G
TU60C TU60S TU60G TU60FC TU60F TU60FG
TU60F
TU60FG
95( − )
−
3.7
4.0
−
3.8
4.2
−
195
(115) 165( − ) 4.4
4.7
5.1
4.5
4.9
5.4
295
(215) 265(155) 5.2
5.5
5.8
5.3
5.6
6.1
395
(315) 365(255) 5.9
6.2
6.5
6.0
6.4
6.8
495
(415) 465(355) 6.7
6.9
7.3
6.8
7.1
7.6
595
(515) 565(455) 7.6
7.7
8.0
7.7
7.9
8.3
ストローク長さ
n1
2
3
4
5
6
7
TU60C
TU60FC
95( − )
195
(135)
295
(235)
395
(335)
495
(435)
595
(535)
注(1) リミットセンサを取り付けた場合に許容できるストローク長さを示します。( )内の値はスライドテーブル2個密着の
時の寸法です。
(2) スライドテーブル1個の時のテーブル全体の質量を示します。モータの質量は含まれていません。
89
電装システム
注
(1) TU60FC、TU60F、TU60FGにはねじ穴がありません。
(2) TU60Cはφ3深2です。
(3) 104ページのモータ部寸法表をご参照ください。
88
252
352
452
552
652
752
n1
トラックレール寸法
28
60
TU60C、TU60S、TU60G
L
mm
<ボールねじリード20mm>
12
(L7)
60
42
59.5
6
A
A
全長
単位
S
(1)
質量(2) kg
TU60S
TU60G
TU60C TU60S TU60G TU60FC TU60F TU60FG
TU60F
TU60FG
95
(−)
−
3.6
3.9
−
3.7
4.1
−
195(115) 165( 55) 4.3
4.6
5.0
4.4
4.8
5.3
295(215) 265(155) 5.1
5.4
5.7
5.2
5.5
6.0
395(315) 365(255) 5.8
6.1
6.4
5.9
6.3
6.7
495(415) 465(355) 6.6
6.8
7.2
6.7
7.0
7.5
595(515) 565(455) 7.5
7.6
7.9
7.6
7.8
8.2
ストローク長さ
注(1) リミットセンサを取り付けた場合に許容できるストローク長さを示します。( )内の値はスライドテーブル2個密着の
時の寸法です。
(2) スライドテーブル1個の時のテーブル全体の質量を示します。モータの質量は含まれていません。
両面加工
両面加工
mm
質量
kg
TU 《TU シリーズ》
<ボールねじリード5mm、10mm>
TU60 モータ折返し仕様
精密位置決めテーブルTU<TUシリーズ>
L
L6(2個密着時中心間寸法)
38
L3
n4-M6深12
31 8 34
L2
mm
大きさ
L2
L3
L4
L5
L6
L7
n3
n4
質量
kg
TU86C
TU86S
TU86G
TU86FC
TU86F
TU86FG
−
46
46
−
28
46
−
−
73
−
46
73
43
93
118
43
93
118
30
63
60
−
−
−
90
140
165
90
140
165
80
130
155
80
130
155
2
4
4
2
4
4
−
−
4
−
4
4
0.7
1.7
2.2
1.1
2.3
3.0
37
6
n3-M6深12(1)
単位
TU 《TU シリーズ》
スライドテーブル寸法
TU86 モータ折返し仕様
トラックレール寸法
100
184
トラックレール
長さ
2×n1-φ7
φ11深ざぐり深7
L1
47
442
542
642
742
842
942
1042
1142
LM(4)
L4
S
M4深6
(2(
)3)
L5
両面加工
42
M4深6
(2)
両面加工
69.5
49.5
73
86
8
A
100
A
13
(L7)
55
全長
L
450
550
650
750
850
950
1050
1150
単位
S
(1)
TU86S
TU86G
TU86F
TU86FG
245(115) 220( 65)
345(215) 320(165)
445(315) 420(265)
545(415) 520(365)
645(515) 620(465)
745(615) 720(565)
845(715) 820(665)
945(815) 920(765)
n1
4
5
6
7
8
9
10
11
TU86C
TU86FC
295
(215)
395
(315)
495
(415)
595
(515)
695
(615)
795
(715)
895
(815)
995
(915)
mm
質量(2) kg
ストローク長さ
TU86C TU86S TU86G TU86FC TU86F TU86FG
10.3
11.2
12.7
14.2
15.4
16.9
18.4
19.9
11.3
12.1
13.6
15.1
16.3
17.8
19.3
20.8
11.8
12.6
14.2
15.7
16.8
18.3
19.8
21.4
10.7
11.6
13.1
14.6
15.8
17.3
18.8
20.3
11.9
12.8
14.3
15.8
17.0
18.5
20.0
21.5
12.6
13.4
15.0
16.5
17.6
19.1
20.6
22.2
注(1) リミットセンサを取り付けた場合に許容できるストローク長さを示します。( )内の値はスライドテーブル2個密着の
時の寸法です。
(2) スライドテーブル1個の時のテーブル全体の質量を示します。モータの質量は含まれていません。
87
L1
A-A断面寸法
112
100
88
46
86
TU86C、TU86S、TU86G
90
46
86
TU86FC、TU86F、TU86FG
56
106
センサ付き
電装システム
注
(1)
(2)
(3)
(4)
42
80
6
6
42
70
25
56.2
46
TU86FはM5深12です。
TU86FC、TU86F、TU86FGにはねじ穴がありません。
TU86Cはφ3深2です。
104ページのモータ部寸法表をご参照ください。
91
精密位置決めテーブルTU<TUシリーズ>
ジャバラ付きテーブル
4-M5深8
28
ジャバラ付きテーブル
8 28
L1
L
290(244)
390(344)
490(444)
590(544)
690(644)
790(744)
299.2(253.2)
399.2(353.2)
499.2(453.2)
599.2(553.2)
699.2(653.2)
799.2(753.2)
28
46
132
80
70
全長
4-M6深8
4-M5深8
8 34
G
S1/2
G
106
74
S1/2
F
単位
トラックレール長さ
S1/2
L
L1
107
1.2
100
S1/2
L
L1
64.4
1.2
F
TU86S
TU 《TU シリーズ》
TU60S
精密位置決めテーブルTU<TUシリーズ>
限界ストローク長さ(1) ストローク長さ(2)
S1
73.6( 68.6)
147.6(142.6)
219.6(214.6)
293.6(288.6)
393.6(388.6)
465.6(460.6)
S
65
( 60)
140
(135)
210
(205)
285
(280)
380
(375)
455
(450)
注
(1) スライドテーブルが移動することができるストロークの限界値を示します。
(2) リミットセンサを取り付けた場合に許容できるストローク長さを示します。
備考1. ( )内の寸法は、モータ折返し仕様のジャバラ付きテーブルに適用します。
2. トラックレールの取付寸法については、TU60の寸法表をご参照ください。
3. Cルーブ付きにも適用します。
単位
mm
F
G
59( 59)
72( 72)
86( 86)
99( 99)
99( 99)
113(113)
93
( 52)
106
( 65)
120
( 79)
133
( 92)
133
( 92)
147
(106)
トラックレール長さ
L1
490
( 442)
590
( 542)
690
( 642)
790
( 742)
890
( 842)
990
( 942)
1090
(1042)
1190
(1142)
全長
L
499.2
( 451.2)
599.2
( 551.2)
699.2
( 651.2)
799.2
( 751.2)
899.2
( 851.2)
999.2
( 951.2)
1099.2
(1051.2)
1199.2
(1151.2)
限界ストローク長さ(1) ストローク長さ(2)
S1
S
203
(198)
275
(270)
349
(344)
421
(416)
521
(516)
593
(588)
667
(662)
739
(734)
195
(190)
265
(260)
340
(335)
410
(405)
510
(505)
580
(575)
655
(650)
730
(725)
mm
F
G
72( 72)
86( 86)
99( 99)
113(113)
113(113)
127(127)
140(140)
154(154)
108
( 65)
122
( 79)
135
( 92)
149(106)
149(106)
163(120)
176(133)
190(147)
注(1) スライドテーブルが移動することができるストロークの限界値を示します。
(2) リミットセンサを取り付けた場合に許容できるストローク長さを示します。
備考1. ( )内の寸法は、モータ折返し仕様のジャバラ付きテーブルに適用します。
2. トラックレールの取付寸法については、TU86の寸法表をご参照ください。
3. Cルーブ付きにも適用します。
電装システム
92
93
精密位置決めテーブルTU<TUシリーズ>
大きさ
L
L6(2個密着時中心間寸法)
TU50C
L4
S
TU50S
TU50F
E
(L7)
L1
TU50G
単位
大きさ
TU40C
TU40S
TU40F
TU40G
トラックレール長さ
全長
ストローク長さ(1)
L1
L
S
180
240
300
360
420
240
300
360
420
240
300
360
420
186
246
306
366
426
246
306
366
426
246
306
366
426
30( − )
90( 40)
150(100)
210(160)
270(220)
80( − )
140( 75)
200(135)
260(195)
60( − )
120( − )
180(105)
240(165)
mm
E
L4
L6
L7
90
19.5
60
55
90
31.5
70
67
90
47.5
85
83
トラックレール長さ
全長
ストローク長さ
(1)
L1
L
S
220
300
380
460
540
620
700
220
300
380
460
540
620
700
300
380
460
540
620
700
226
306
386
466
546
626
706
226
306
386
466
546
626
706
306
386
466
546
626
706
65( − )
145( 90)
225(170)
305(250)
385(330)
465(410)
545(490)
45( − )
125( 50)
205(130)
285(210)
365(290)
445(370)
525(450)
100( − )
180( 80)
260(160)
340(240)
420(320)
500(400)
E
L4
L6
L7
90
23.8
65
63
90
42.8
85
82
90
66.8
110
106
TU 《TU シリーズ》
TU40、TU50 Cルーブ付きテーブル
注(1) リミットセンサを取り付けた場合に許容できるストローク長さを示します。( )内の値はスライドテーブル2個密着の
時の寸法です。
備考 スライドテーブルとトラックレールの寸法は、それぞれの大きさの寸法表をご参照ください。
電装システム
94
95
精密位置決めテーブルTU<TUシリーズ>
Cルーブ付きテーブル
大きさ
L
L6(2個密着時中心間寸法)
TU86C
TU86FC
L4
S
TU86S
TU86F
E
(L7)
TU86G
TU86FG
L1
単位
大きさ
TU60C
TU60FC
TU60S
TU60F
TU60G
TU60FG
トラックレール長さ
全長
L1
L
290
390
490
590
690
790
290
390
490
590
690
790
290
390
490
590
690
790
298
398
498
598
698
798
298
398
498
598
698
798
298
398
498
598
698
798
ストローク長さ
(1) S
リード15mm
リード15mm
リード20mm
リード20mm
リード10mm
リード10mm
90( 40)
190(140)
290(240)
390(340)
490(440)
590(540)
90( − )
190(110)
290(210)
390(310)
490(410)
590(510)
60( − )
160( 50)
260(150)
360(250)
460(350)
560(450)
70( − )
170(120)
270(220)
370(320)
470(420)
570(520)
70( − )
170(100)
270(200)
370(300)
470(400)
570(500)
−( − )
155( − )
255(150)
355(250)
455(350)
555(450)
mm
E
100
120
L4
27.4
L6
175
L7
170
180
195
52.4
100
195
180
185
83
130
125
TU100S
TU100F
TU130S
TU130F
トラックレール長さ
全長
ストローク長さ
(1)
L1
490
590
690
790
890
990
1090
1190
490
590
690
790
890
990
1090
1190
490
590
690
790
890
990
1090
1190
1010
1160
1310
1460
1010
1160
1310
1460
1610
L
498
598
698
798
898
998
1098
1198
498
598
698
798
898
998
1098
1198
498
598
698
798
898
998
1098
1198
1020
1170
1320
1470
1020
1170
1320
1470
1620
S
260(0190)
360(0290)
460(0390)
560(0490)
660(0590)
760(0690)
860(0790)
960(0890)
230(0120)
330(0220)
430(0320)
530(0420)
630(0520)
730(0620)
830(0720)
930(0820)
210(0070)
310(0170)
410(0270)
510(0370)
610(0470)
710(0570)
810(0670)
910(0770)
670
(0540)
820
(0690)
970
(0840)
1120
(0990)
630
(0480)
780
(0630)
930
(0780)
1080
(0930)
1230
(1080)
E
L4
L6
L7
110
43
95
92
85
93
145
142
85
118
170
167
130
111
170
166
140
132
195
190
TU 《TU シリーズ》
TU60、TU86、TU100、TU130
注(1) リミットセンサを取り付けた場合に許容できるストローク長さを示します。( )内の値はスライドテーブル2個密着の
時の寸法です。
備考 スライドテーブルとトラックレールの寸法は、それぞれの大きさの寸法表をご参照ください。
電装システム
96
97
精密位置決めテーブルTU<TUシリーズ>
大きさ
L
L6(2個密着時中心間寸法)
TU50C
TU50S
TU50F
L4
S
E
TU50G
(L7)
L1
単位
大きさ
TU40C
TU40S
TU40F
TU40G
トラックレール長さ
全長
ストローク長さ(1)
L1
L
S
140
200
260
320
380
200
260
320
380
200
260
320
380
146
206
266
326
386
206
266
326
386
206
266
326
386
30
(−)
90
( 40)
150
(100)
210
(160)
270
(220)
80
(−)
140
( 75)
200
(135)
260
(195)
60
(−)
120
(−)
180
(105)
240
(165)
mm
E
L4
L6
L7
50
19.5
60
55
50
31.5
70
67
50
47.5
85
83
トラックレール
長さ L1
全長
ストローク長さ
(1)
L
S
180
260
340
420
500
580
660
180
260
340
420
500
580
660
260
340
420
500
580
660
186
266
346
426
506
586
666
186
266
346
426
506
586
666
266
346
426
506
586
666
65( − )
145( 90)
225(170)
305(250)
385(330)
465(410)
545(490)
45( − )
125( 50)
205(130)
285(210)
365(290)
445(370)
525(450)
100( − )
180( 80)
260(160)
340(240)
420(320)
500(400)
E
L4
L6
L7
50
23.8
65
63
50
42.8
85
82
50
66.8
110
106
TU 《TU シリーズ》
TU40、TU50 Cルーブ付きテーブル・モータ折返し仕様
注(1) リミットセンサを取り付けた場合に許容できるストローク長さを示します。( )内の値はスライドテーブル2個密着の
時の寸法です。
備考 スライドテーブルとトラックレールの寸法は、それぞれの大きさの寸法表をご参照ください。
電装システム
98
99
精密位置決めテーブルTU<TUシリーズ>
大きさ
L
L6(2個密着時中心間寸法)
TU86C
TU86FC
TU86S
TU86F
L4
S
E
TU86G
TU86FG
(L7)
L1
単位
大きさ
TU60C
TU60FC
TU60S
TU60F
TU60G
TU60FG
トラックレール
長さ L1
全長
244
344
444
544
644
744
244
344
444
544
644
744
344
444
544
644
744
252
352
452
552
652
752
252
352
452
552
652
752
352
452
552
652
752
L
ストローク長さ
(1) S
70( − )
170(120)
270(220)
370(320)
470(420)
570(520)
70( − )
170(100)
270(200)
370(300)
470(400)
570(500)
155( − )
255(150)
355(250)
455(350)
555(450)
全長
ストローク長さ
(1)
L1
442
542
642
742
842
942
1042
1142
442
542
642
742
842
942
1042
1142
442
542
642
742
842
942
1042
1142
L
450
550
650
750
850
950
1050
1150
450
550
650
750
850
950
1050
1150
450
550
650
750
850
950
1050
1150
S
250(190)
350(290)
450(390)
550(490)
650(590)
750(690)
850(790)
950(890)
230(120)
330(220)
430(320)
530(420)
630(520)
730(620)
830(720)
930(820)
210( 70)
310(170)
410(270)
510(370)
610(470)
710(570)
810(670)
910(770)
E
L4
L6
L7
70
43
95
92
40
93
145
142
40
118
170
167
注(1) リミットセンサを取り付けた場合に許容できるストローク長さを示します。( )内の値はスライドテーブル2個密着の
時の寸法です。
備考 スライドテーブルとトラックレールの寸法は、それぞれの大きさの寸法表をご参照ください。
E
リード15mm
リード15mm
リード20mm
リード20mm
リード10mm
リード10mm
90( 40)
190(140)
290(240)
390(340)
490(440)
590(540)
80( − )
180(110)
280(210)
380(310)
480(410)
580(510)
150( 50)
250(150)
350(250)
450(350)
550(450)
mm
トラックレール長さ
TU 《TU シリーズ》
TU60、TU86 Cルーブ付きテーブル・モータ折返し仕様
L4
L6
L7
55
74
27.4
175
170
40
49
52.4
100
195
40
39
83
130
125
電装システム
100
101
精密位置決めテーブルTU<TUシリーズ>
大きさ
トラックレール
仕様
モータ折返しなし
F1
G1
TU 60
モータ折返し仕様
L1
単位
大きさ
TU25
TU30
トラックレール
仕様
モータ折返しなし
モータ折返しなし
モータ折返しなし
TU40
モータ折返し仕様
モータ折返しなし
TU 50
102
L1
130
165
200
140
180
220
260
300
340
180
240
300
360
420
140
200
260
320
380
220
300
380
460
540
620
700
180
260
340
420
500
580
660
ブリッジカバーなし
mm
ブリッジカバー付き
F1
G1
F1
G1
14
14
14
14
モータ折返しなし
14
14
14
14
TU 86
20
18
20
18
モータ折返し仕様
20
20
18
18
20
20
18
TU100
モータ折返しなし
TU130
モータ折返しなし
18
L1
290
390
490
590
690
790
990
1190
244
344
444
544
644
744
490
590
690
790
890
990
1090
1190
1390
1590
442
542
642
742
842
942
1042
1142
1010
1160
1310
1460
1010
1160
1310
1460
1610
ブリッジカバーなし
ブリッジカバー付き
F1
G1
F1
G1
32
17
35
29
32
17
−
−
32
28
35
29
32
19
35
29
32
19
−
−
32
28
35
29
35
34
35
34
35
38
35
38
備考 スライドテーブルとトラックレールの寸法は、それぞれの大きさの寸法表をご参照ください。
20
18
20
電装システム
モータ折返し仕様
トラックレール長さ
トラックレール長さ
TU 《TU シリーズ》
ボールねじなし仕様
18
103
モータ部寸法
表19 TUのモータアタッチメントなしの寸法
A1
A2
A3
モータ
H1
W
d1
d2
LM
W
W1
W2
P1
M1
H2
H3
P2 P2
LM
モータアタッチメント
TU25
TU30
TU25
TU30
h
モータアタッチメント
H(1)
A1
A2
A3
d1
単位
大きさ
TU 25
TU 30
大きさ
TU 40
TU 50
TU 60
TU 86
TU100
ブレーキなし
ブレーキ付き
ブレーキなし
ブレーキ付き
ブレーキの
有無
ブレーキなし
ブレーキ付き
ブレーキなし
ブレーキ付き
ブレーキなし
ブレーキ付き
ブレーキなし
ブレーキ付き
ブレーキなし
ブレーキ付き
ブレーキなし
ブレーキ付き
h
5
5
5
5
AL…
H( ) W
25
25
−
25
25
1
LM
64
92.5
64
92.5
HL…
H( ) W
28
28
−
28
28
LM
61
88
61
88
h
6.5
−
6.5
−
ACサーボモータ
h
19
19
Y…
H
W
48.5 40
55
40
18
72
40
13
79.5 60
17
93
60
17 112.5 80
LM
77
108.5
77
108.5
94.5
135
96.5
136
124.5
164
145
189.5
h
19
19
P…
H
W
48.5 38
55
38
18
72
38
13
79.5 60
17
93
60
17 112.5 80
LM
73
105
73
105
103
135
94
127
123.5
156.5
142.5
177.5
h
19
19
J…
H
W
48.5 40
55
40
18
72
40
13
79.5 60
17
93
60
17 112.5 80
LM
81.5
109.5
81.5
109.5
96.5
124.5
99.5
131.5
124.5
156.5
142
177.5
注
( ) TU25、TU30の H 寸法は、テーブル本体高さ寸法より小さくなっています。
備考 スライドテーブルとトラックレールの寸法は、それぞれの大きさの寸法表をご参照ください。
104
mm
ステッピングモータ
1
h
5
5
5
5
TU40、TU50
(ステッピングモータ仕様)
(1)
V…
H
() W
28
−
−
28
−
1
単位
LM
32
−
32
−
大きさ
A1
A2
A3
d1
d2
TU 25
28
15
H1
H2
6
0
φ 5 -0.008
φ16 +0.04
+0.02
0
-0.008
16
31
+0.04
+0.02
φ16
mm
H3
H4
H5
26.3
−
−
TU 30
28
15
6
20
35
26.3
−
−
TU 40
40
24
10
0
φ 5 -0.008
φ26 +0.04
+0.02
28.5
43.5
30
56.5
56
ステッピングモータ
TU 50
40
24
10
0
φ 5 -0.008
φ26 +0.04
+0.02
35
55
40
63
56
V…
H
W
TU 60
46
29
15
0
φ 8 -0.009
φ32 +0.04
+0.02
42
62
40
−
−
0
-0.009
+0.04
+0.02
h
19
19
56.5 42
63
42
18
72
60
18
79.5 60
25 100.5 85
25 115
85
LM
47
77
47
77
89
129
89
129
98
149
98
149
φ 5
φ39
TU 86
48
29
15
φ 8
TU100
72
44
22
0
φ12 -0.011
φ59 +0.04
+0.02
20
0
-0.011
+0.04
+0.02
TU130
大きさ
TU 25
TU 30
TU 40
TU 50
TU 60
TU 86
TU100
TU130
72
W1
25
30
40
50
57.7
83.6
98
128
44
W2
20
20
−
−
−
−
−
−
φ15
P1
17
17
30
30
50
50
72
72
φ59
P2
8.5
8.5
10
10
20
20
40
40
49.5
74.5
50
−
−
58
93
70
−
−
107.5
70
−
72.5
P3
−
−
49
49
−
−
−
−
M1
6-φ2.9
6-φ2.9
4-M3深6
4-M3深6
4-M4深8
4-M4深8
4-M5深10
4-M5深10
−
M2
−
−
8-M3深6
8-M3深6
−
−
−
−
注(1) モータアタッチメントなしでステッピングモータ仕様をご要望の際は、
にお問い合わせください。
備考 スライドテーブルとトラックレールの寸法は、それぞれの大きさの寸法表をご参照ください。
105
電装システム
TU130
1
ブレーキの
有無
ACサーボモータ
モータ
W1
P1
M2
W1
P1
M1
d2
TU 30(AL…、V…)
TU 50
TU 60
TU 86
TU100
TU130
TU 25
TU 30(HL…)
TU 40
モータアタッチメント
H4
H5
P3
P2
テーブル
H2
H3
P2
モータアタッチメント
H1
h
H(1)
テーブル
TU 《TU シリーズ》
表18 TUのモータ部寸法
モータ折返しユニット
A2
W1
M1
P1
P2
H1
H2
H3
d1
A3
TU 《TU シリーズ》
表20 TUのモータ折返しユニットなしの寸法
単位
mm
大きさ
A2
A3
d1
H1
H2
H3
W1
P1
P2
M1
TU 40
18
10
0
φ 5 -0.008
28.5
43.5
30
40
24
24
4-M4深6
0
-0.008
35
50
30
40
24
24
4-M4深6
42
62
40
60
42
20
4-M4深8
49.5
69.5
40
85
42
20
4-M4深8
TU 50
18
10
φ 5
TU 60
21
15
0
φ 8 -0.009
15
0
-0.009
TU 86
21
φ 8
備考 スライドテーブルとトラックレールの寸法は、それぞれの大きさの寸法表をご参照ください。
電装システム
106
107
TSL…M 《ロングストロークシリーズ》
モータ
ブリッジカバー
スライドテーブル
カップリング
C ルーブボールねじ
C ルーブリニアウェイ
ベッド
電装システム
精密位置決めテーブル L の構造
108
109
呼び番号
諸特性
■精度
呼び番号の配列例
表2 精度
●
1 形式
●
大きさ
●
5 モータの種類
●
TSL 90S M
●
2 大きさ
●
●
6 ボールねじのリード
●
●
3 ストローク長さ
●
●
4 モータの有無
●
TSL120S M
●
1 形式
●
TSL…M:精密位置決めテーブルL
●
2 大きさ
●
大きさは、テーブル幅寸法を示しています。
表1に示す大きさから選択します。
●
3 ストローク長さ
●
表1に示すストローク長さから選択します。
TSL170S M
表1 大きさとテーブル幅寸法及びストローク長さ
テーブル幅寸法
mm
大きさ
TSL 90S
TSL120S
TSL170S
TSL170S
TSL220S
M
M
M
M
M
●
4 モータの有無
●
90
120
170
170
220
ストローク長さ
mm
50、100、150、200、250、300
100、150、200、250、300、400、500、600
150、200、250、300、400、500
300、400、500、600、800、1000
300、400、500、600、800、1000
TSL170S M
TSL220S M
ストローク長さ
位置決め精度
50
100
150
200
250
300
100
150
200
250
300
400
500
600
150
200
250
300
400
500
300
400
500
600
800
1000
0.015
テーブル運動の
平行度B
バックラッシ
0.020
0.020
±0.002
0.030
0.003
0.025
0.030
0.040
0.020
0.030
0.025
0.030
0.040
0.045
0.050
0.020
±0.002
0.050
0.003
0.050
0.070
0.030
0.025
0.030
0.040
0.045
0.030
0.040
0.045
0.040
TSL…M 《ロングストロークシリーズ》
TSL 120 M - 200 A / Y028 10
単位 mm
繰返し
位置決め精度
±0.002
0.003
0.050
0.040
0.050
±0.002
0.003
0.070
0.060
無記号:モータなし
A
:モータ付き
お客様にてモータをご用意いただく場合には、モータなし(無記号)としてください。
●
5 モータの種類
●
ACサーボモータをご指定の場合は357ページをご参照ください。
ステッピングモータをご指定の場合は364ページをご参照ください。
4 の項のモータの有無の指定をモータなし(無記号)とした場合、各モータに適用するモータアタッチメントとカップリン
●
グが取り付けられます。
●
6 ボールねじのリード
●
5:リード5mm
10:リード10mm
電装システム
110
111
■最高速度
■最大搭載質量
表3 最高速度
ステッピングモータ
大きさ
モータ回転数
r/min
リード5mm
リード10mm
TSL 90S M
TSL120S M
TSL170S M
−
3000
250
500
TSL170S M
TSL220S M
600以下
800
1000
3000
2990
2030
250
249
169
500
498
338
−
1800
150
300
TSL 90S
TSL120S
TSL170S
TSL170S
TSL220S
M
M
M
M
M
L
搭載質量W
H
ACサーボモータ
最大搭載質量
TSL…M 《ロングストロークシリーズ》
モータの種類
表4.1
最高速度 mm/s
ストローク長さ
mm
備考 標準モータを使用した時の値です。実際の最高速度は使用モータや負荷条件などに応じた運転パターンの検討が必要です。
単位 kg
大きさ
高さ寸法
H
mm
mm
0
100
200
300
mm
400
500
600
800
1000
0
200
400
600
0
200
400
600
0
200
400
600
0
200
400
600
74
69
50
39
26
26
24
17
190
190
190
190
97
97
97
97
21
20
19
18
16
15
13
11
140
140
130
120
97
97
85
72
12
12
12
11
9.1
8.8
8.3
7.6
84
83
81
78
64
62
57
52
8.2
8.2
8.1
8.0
6.3
6.2
6.0
5.8
59
59
58
57
45
44
42
40
6.3
6.3
6.3
6.2
4.9
4.8
4.7
4.6
46
46
45
45
35
34
33
32
5.1
5.1
5.1
5.1
3.9
3.9
3.9
3.8
37
37
37
37
28
28
27
27
4.3
4.3
4.3
4.3
3.3
3.3
3.3
3.2
31
31
31
31
24
24
23
23
3.3
3.3
3.3
3.3
2.5
2.5
2.5
2.5
24
24
24
24
18
18
18
18
2.6
2.6
2.6
2.6
2.0
2.0
2.0
2.0
19
19
19
19
15
15
14
14
5
TSL 90S M
10
5
TSL120S M
10
備考
長さ寸法 L
ボールねじ
のリード
各大きさの最高速度、加減速時間0.2sで連続運転した時に、ボールねじ又は直動案内機器の定格寿命が18000時間となる
質量を基準に算出しています。
電装システム
112
113
最大搭載質量
mm
0
100
200
0
200
400
600
0
200
400
600
0
200
400
600
0
200
400
600
0
200
400
600
0
200
400
600
190
190
190
190
97
97
97
97
220
220
220
220
110
110
110
110
220
220
220
220
110
110
110
110
170
170
150
140
97
97
94
77
190
190
180
170
110
110
110
110
220
220
220
220
110
110
110
110
100
100
99
94
79
74
67
59
120
120
120
110
91
89
85
79
220
220
220
220
110
110
110
110
5
TSL170S M
10
5
TSL170S M
10
5
TSL220S M
10
備考
表5 直動案内部の仕様
300
mm
400
500
600
800
1000
75
74
73
70
56
54
51
47
85
84
84
83
65
64
63
60
220
220
220
220
110
110
110
110
58
58
57
56
43
43
41
39
66
66
66
65
51
50
50
48
180
180
180
170
110
110
110
110
47
47
47
46
35
35
34
33
54
54
54
54
42
41
41
40
150
150
150
150
110
110
110
100
40
40
40
39
30
30
29
28
46
46
46
46
35
35
35
35
130
130
130
130
95
94
92
89
31
31
31
30
23
23
23
22
35
35
35
35
27
27
27
27
98
98
98
97
73
73
72
70
25
25
25
25
19
18
18
18
29
29
29
29
22
22
22
22
80
80
80
80
60
59
59
58
各大きさの最高速度、加減速時間0.2sで連続運転した時に、ボールねじ又は直動案内機器の定格寿命が18000時間となる
質量を基準に算出しています。
Y
スライドユニット2
スライドユニット1
L /2
mm
■直動案内部の仕様
L
高さ寸法
H
TSL…M 《ロングストロークシリーズ》
大きさ
単位 kg
長さ寸法 L
ボールねじ
のリード
X
0
L /2
表4.2
スライドユニット4
ë/2ë/2
ë
スライドユニット3
Z
Z
駆動位置(Yd、Zd)
X
0
配置
基本動定格荷重(1) 基本静定格荷重(1)
大きさ
TSL 90S
TSL120S
TSL170S
TSL170S
TSL220S
M
M
M
M
M
C
N
C0
N
1810
2760
11600
13400
25200
28800
Y
0
Yd
Zd
mm
ë
mm
mm
mm
60
80
106
120
162
60
66
66
130
95
0
0
0
0
0
−7
8
11
1
11
L
注(1) スライドユニット1個当りの値です。
■ボールねじの仕様
表6 ボールねじの仕様
大きさ
ボールねじ
の種類
TSL 90S M
研削ねじ
TSL120S
TSL170S
TSL170S
TSL220S
M
M
M
M
研削ねじ
研削ねじ
リード
mm
5
10
5
10
5
10
ねじ外径
mm
軸方向すきま
mm
10
0.005
15
0.005
20
0.005
基本動定格荷重
基本静定格荷重
C
N
C0
N
1470
1030
3820
3820
4460
4460
2210
1370
6370
6370
8580
8580
電装システム
114
115
センサ仕様
■テーブルイナーシャと起動トルク
表8 センサのタイミングチャート
表7 テーブルイナーシャと起動トルク
TSL 90S M
TSL120S M
TSL170S M
TSL170S M
TSL220S M
ストローク長さ
mm
50
100
150
200
250
300
100
150
200
250
300
400
500
600
150
200
250
300
400
500
300
400
500
600
800
1000
300
400
500
600
800
1000
テーブルイナーシャ J T
×10−5kg・m2
リード5mm
リード10mm
0.20
0.25
0.28
0.33
0.35
0.40
1.3
1.5
1.7
1.9
2.1
2.4
2.8
3.2
1.4
1.6
1.8
2.0
2.3
2.7
6.9
8.1
9.3
11
13
15
7.5
8.7
9.9
11
14
16
0.33
0.38
0.40
0.45
0.48
0.53
1.7
1.9
2.1
2.3
2.5
2.9
3.3
3.7
1.8
2.0
2.2
2.4
2.8
3.2
7.4
8.6
9.8
11
14
16
8.5
9.7
11
12
15
17
TSL…M 《ロングストロークシリーズ》
大きさ
起動トルク T 0
N・m
CW
CCW
0.05
A
ON
B
原点
0.06
C
OFF
D
OFF
ストローク長さ
OFF
0.06
原点前
CCWリミット
CWリミット
メカストッパ
F
E
0.10
単位
大きさ
TSL 90S M
0.10
TSL120S M
TSL170S M
TSL170S M
TSL220S M
ボールねじの
リード
5
10
5
10
5
10
5
10
5
10
A
50
60
45
60
60
B
C
5
10
5
10
5
10
5
10
5
10
3
7
3
7
3
7
3
7
3
7
mm
D
E
F
20
5
5
20
15
15
20
3
3
20
5
5
20
5
5
備考1. 各センサの仕様については総合解説のセンサ仕様の項をご参照ください。
2. ACサーボモータを選択した場合、原点センサは付いていません。エンコーダのC相又はZ相信号を使用してください。
電装システム
116
117
組合せ例
■XYブラケット
●TSL90-AGL
80
TSL…M 《ロングストロークシリーズ》
精密位置決めテーブルLは、図2及び図3に示すXYブラケット(アルミニウム合金製)を使用して多
彩な2軸組合せを構成することができます。ご要望の際は図中の呼び番号でご指示ください。
20
4-M4深10
60
4-M4用穴
10
90
60
17.5
90
10
80
90
90
●TSL90-AGI
80
5
90
60
4-M4深10
45
60
60
80
60
5
80
4-M4深10
90
27.5
10
17.5
120
10
4-M4用穴
20
5
●TSL90-AGT
4-M4用穴
220
130
90
15
5
90
45
80
10
60
4-M4用穴
6-M4深10
84
125
10
5
25
118
電装システム
図1 2軸組合せの構成例
90
87.5
35
60
80
60
図2 XYブラケット(TSL90M用)
119
精密位置決めテーブルL<ロングストロークシリーズ>
TSL90M
4-M5深10
85
27.5
120
5 LM(2)
L
20
4-M5用穴
120
12
B
85
TSL…M 《ロングストロークシリーズ》
108
●TSL120-AGL
20
B
60
60
A
60
80
4-M4深8
90
S/2
20
80
90
120
60
12
108
120
●TSL120-AGI
(4)(E1)
4-M5用穴
S/2
(E2)
10
50 10
108
4-M5用穴
85
37.5
120
12
22.5
85
85
108
6
27.5
12-M4用穴
20
150
33
4-M5深10
65
5
12
φ8
4-M5深10
60
(1.5)
108
6
120
85
単位
●TSL120-AGT
ストローク寸法
300
呼び番号
120
6
60
TSL90M− 50
TSL90M−100
TSL90M−150
TSL90M−200
TSL90M−250
TSL90M−300
4-M5用穴
6-M5深10
E2
120
50
100
150
200
250
300
30
30
全長
L
200
250
300
350
400
450
ベッド取付穴
A
40
90
140
190
240
290
B
70
95
120
145
170
195
2.8
3.2
3.5
3.9
4.2
4.6
104
160
15
120
注(1) モータの質量は含まれていません。
(2) 電装システムのモータ仕様の項をご参照ください。
電装システム
6
30
E1
mm
質量(1)
(参考)
kg
40
85
108
85
S
17.5
108
12
85
120
180
テーブル寸法
図3 XYブラケット(TSL120M用)
120
121
精密位置決めテーブルL<ロングストロークシリーズ>
TSL120M
精密位置決めテーブルL<ロングストロークシリーズ>
TSL170M
B
C
156
B
D
85
30
156
60
140
170
105
C
30
85
108
120
A
85
B
A
105
D
5 LM(2)
L
B
TSL…M 《ロングストロークシリーズ》
LM(2)
L
4-M6深12
108
4-M5深10
13
70
呼び番号
TSL120M−100
TSL120M−150
TSL120M−200
TSL120M−250
TSL120M−300
TSL120M−400
TSL120M−500
TSL120M−600
S
100
150
200
250
300
400
500
600
E1
40
テーブル寸法
E2
40
全長
L
300
350
400
450
500
600
700
800
ベッド取付穴
A
85
135
185
235
255
355
455
555
B
107.5
132.5
157.5
182.5
207.5
207.5
207.5
207.5
C
85
85
85
85
85
185
285
385
D
22.5
22.5
22.5
22.5
37.5
37.5
37.5
37.5
n
8
12
12
12
12
12
12
12
12
(E2)
144
12
6
単位
ストローク寸法
S/2
110
22.5
n-M5用穴
S/2
(E1)
(6)
(1.5)
72
38
φ10
13
65
(E2)
33
S/2
120
4-M6用穴
60
φ10
S/2
(5)(E1)
(1)
n-M6用穴
単位
mm
質量
(1 )
(参考)
kg
6.1
6.6
7.1
7.6
8.1
9.1
10.1
11.1
ストローク寸法
呼び番号
TSL170M−150
TSL170M−200
TSL170M−250
TSL170M−300
TSL170M−400
TSL170M−500
S
150
200
250
300
400
500
E1
25
テーブル寸法
E2
25
全長
L
310
360
410
460
560
660
ベッド取付穴
A
100
150
200
250
350
450
B
77
102
127
152
202
252
C(個数×ピッチ)
250
300
350(2×175)
400(2×200)
500(2×250)
600(2×300)
n
8
8
10
10
10
10
mm
質量(1)
(参考)
kg
7.2
7.8
8.4
9.1
10.4
11.6
注(1) モータの質量は含まれていません。
(2) 電装システムのモータ仕様の項をご参照ください。
注
(1) モータの質量は含まれていません。
(2) 電装システムのモータ仕様の項をご参照ください。
電装システム
122
123
精密位置決めテーブルL<ロングストロークシリーズ>
TSL170SM
TSL220M
120
A
A
120
120
30
B
B
160
A
70
160
200
220
105
15
(2)(E1)
S/2
200
S/2
( E2 )
16
144
16
n-M8用穴
単位
ストローク寸法
呼び番号
TSL170SM− 300
TSL170SM− 400
TSL170SM− 500
TSL170SM− 600
TSL170SM− 800
TSL170SM−1000
S
300
400
500
600
800
1000
E1
40
テーブル寸法
E2
40
注
(1) モータの質量は含まれていません。
(2) 電装システムのモータ仕様の項をご参照ください。
モータの種類
ACサーボモータ
ステッピングモータ
124
単位 mm
h
−
11
L
580
680
780
880
1080
1280
ベッド取付穴
A(個数×ピッチ)
80
130
180
230
330(2×165)
430(2×215)
n
12
12
12
12
16
16
単位
mm
ストローク寸法
質量(1)
(参考)
kg
呼び番号
14.8
16.6
18.5
20.3
24.0
27.7
TSL220M− 300
TSL220M− 400
TSL220M− 500
TSL220M− 600
TSL220M− 800
TSL220M−1000
S
E1
300
400
500
600
800
1000
40
テーブル寸法
E2
40
全長
L
580
680
780
880
1080
1280
ベッド取付穴
A(個数×ピッチ)
440(2×220)
540(2×270)
640(2×320)
740(4×185)
940(4×235)
1140(4×285)
B
210
260
310
360
460
560
n
6
6
6
10
10
10
mm
質量(1)
(参考)
kg
20.1
22.5
24.7
27.0
31.5
36.2
注(1) モータの質量は含まれていません。
(2) 電装システムのモータ仕様の項をご参照ください。
モータ取付部寸法
モータの種類
ACサーボモータ
ステッピングモータ
単位
mm
電装システム
モータ取付部寸法
全長
20
10
n-M6用穴
30
90
41
90
φ15
15
(1)
(E2)
4-M8用穴
45
S/2
200
100
φ15
S/2
4-M8深16
4-M6深12
(3.5)
150
100
120
150
170
hLM(2)
L
70
(2)(E1)
TSL…M 《ロングストロークシリーズ》
(2)
h LM
L
30
精密位置決めテーブルL<ロングストロークシリーズ>
h
−
10
125
TSLH…M・CTLH…M 《高剛性シリーズ》
C ルーブリニアウェイ
スライドテーブル
C ルーブボールねじ
モータ
Y テーブル
ベッド
X テーブル
TSLH…M(単軸仕様)
電装システム
CTLH…M(二軸仕様)
精密位置決めテーブル LH の構造
126
127
呼び番号
呼び番号の配列例(単軸仕様)
●
5 モータの種類
●
TSLH 220 M - 200 A / Y029 10 J R
4 の項のモータの有無の指定をモータなし(無記号)とした場合、各モータに適用するモータアタッチメントとカップリン
●
グが取り付けられます。
●
5 モータの種類
●
●
6 ボールねじのリード
●
●
2 大きさ
●
●
6 ボールねじのリード
●
●
3 ストローク長さ
●
●
7 ジャバラの指定
●
●
4 モータの有無
●
●
8 表面処理
●
●
7 ジャバラの指定
●
TSLH…M・CTLH…M 《高剛性シリーズ》
●
1 形式
●
ACサーボモータをご指定の場合は358ページをご参照ください。
ステッピングモータをご指定の場合は365ページをご参照ください。
5:リード 5mm
10:リード10mm
無記号:ジャバラなし
J
:ジャバラ付き
ジャバラ付きのテーブルは、使用できるストローク長さが若干短くなるので、寸法表をご参照ください。
無記号:黒色クロム皮膜処理
●
1 形式
●
TSLH…M:精密位置決めテーブルLH(単軸仕様)
●
2 大きさ
●
●
8 表面処理
●
R
:黒色クロム皮膜処理1
L
:黒色クロム皮膜処理2
大きさはテーブル幅寸法を示しています。
黒色クロム皮膜処理 :リニアウェイ、ボールねじ、ボールベアリングを除く主要部品に処理を施します。
表1に示す大きさから選択します。
黒色クロム皮膜処理1:上記の黒色クロム皮膜処理に加えて、リニアウェイの表面にも処理を施します。
黒色クロム皮膜処理2:上記の黒色クロム皮膜処理1に加えて、ボールねじの表面にも処理を施します。
●
3 ストローク長さ
●
黒色クロム皮膜処理は、表面に黒色の浸透性皮膜を形成することにより耐食性を向上させます。
表1に示すストローク長さから選択します。
ジャバラ付きのテーブルは、使用できるストローク長さが若干短くなるので、寸法表をご参照ください。
各部品の基準面については、表面処理が取り除かれます。
表1 大きさとテーブル幅寸法及びストローク長さ
備考 (
大きさ
テーブル幅寸法
mm
TSLH120M
TSLH220M
TSLH320M
TSLH420M
120
220
320
420
)内に示すストローク長さをご要望の際は、
●
4 モータの有無
●
ストローク長さ
mm
100、150、200、250、300
150、200、250、300、400 (500、600)
300、400、500 (600、800、1000)
500、600、800 (1000)
にお問い合わせください。
無記号:モータなし
A
:モータ付き
お客様にてモータをご用意いただく場合には、モータなし(無記号)としてください。
電装システム
128
129
呼び番号の配列例(二軸仕様)
●
7 ボールねじのリード
●
CTLH 220 M - 30 20 A / Y029 10 J R C
●
1 形式
●
●
6 モータの種類
●
●
2 大きさ
●
●
7 ボールねじのリード
●
●
3 X軸ストローク長さ
●
●
8 ジャバラの指定
●
無記号:ジャバラなし
J
TSLH…M・CTLH…M 《高剛性シリーズ》
●
8 ジャバラの指定
●
5:リード 5mm
10:リード10mm
:ジャバラ付き
ジャバラ付きのテーブルは、使用できるストローク長さが若干短くなるので、寸法表をご参照ください。
無記号:黒色クロム皮膜処理
●
4 Y軸ストローク長さ
●
●
9 表面処理
●
●
5 モータの有無
●
●
10 組合せ方向の指定
●
●
9 表面処理
●
R
:黒色クロム皮膜処理1
L
:黒色クロム皮膜処理2
黒色クロム皮膜処理 :リニアウェイ、ボールねじ、ボールベアリングを除く主要部品に処理を施します。
黒色クロム皮膜処理1:上記の黒色クロム皮膜処理に加えて、リニアウェイの表面にも処理を施します。
黒色クロム皮膜処理2:上記の黒色クロム皮膜処理1に加えて、ボールねじの表面にも処理を施します。
黒色クロム皮膜処理は、表面に黒色の浸透性皮膜を形成することにより耐食性を向上させます。
各部品の基準面については、表面処理が取り除かれます。
●
1 形式
●
CTLH…M:精密位置決めテーブルLH(二軸仕様)
120:テーブルの幅寸法120mm
●
2 大きさ
●
220:テーブルの幅寸法220mm
320:テーブルの幅寸法320mm
●
10 組合せ方向の指定
●
無記号:正方向
C
:逆方向
正方向:X軸モータを手前側に見て、Y軸モータが右側にくる組合せの方向。
逆方向:X軸モータを手前側に見て、Y軸モータが左側にくる組合せの方向。
異なる大きさのテーブルを組み合わせることも可能です。
●
3●
●
4 ストローク長さ
●
寸法表を参照してください。
それぞれの軸のストローク長さをcm単位で表示します。X、Y軸で指定できる長さが異なります。
ジャバラ付きのテーブルは、使用できるストローク長さが若干短くなるので、寸法表をご参照ください。
●
5 モータの有無
●
無記号:モータなし
A
:モータ付き
お客様にてモータをご用意いただく場合には、モータなし(無記号)としてください。
●
6 モータの種類
●
ACサーボモータをご指定の場合は358ページをご参照ください。
ステッピングモータをご指定の場合は365ページをご参照ください。
電装システム
5 の項のモータの有無の指定をモータなし(無記号)とした場合、各モータに適用するモータアタッチメントとカップリング
●
が取り付けられます。
130
131
諸特性
■精度
■最大搭載質量
表2 精度
単
軸 TSLH220M
仕
様
TSLH320M
TSLH420M
CTLH120M
二
軸
CTLH220M
仕
様
CTLH320M
Y軸
位置決め精度
100
150
200
250
300
150
200
250
300
400
300
400
500
500
600
800
100 100
200 100
200 200
300 200
300 300
200 200
300 200
300 300
400 300
400 400
300 300
400 300
400 400
500 400
500 500
0.010
0.015
0.010
±0.002
0.020
0.010
0.015
±0.002
0.025
0.030
0.035
0.015
0.020
0.015
0.020
±0.002
±0.002
±0.002
XY運動の
直角度
真直度
0.015
0.025
0.030
0.035
0.015
0.020
0.025
mm
表4 最大搭載質量
L
バックラッシ
搭載質量W
0.005
0.015
0.020
0.010
0.020
0.015
0.020
テーブル運動の
平行度A
−
0.001
−
0.001
0.010
0.005
0.010
単位 kg
0.005
0.001
−
0.015
0.001
−
0.020
0.005
0.005
0.010
0.010
0.030
0.030
0.025
0.020
0.025
0.010
大きさ
ボールねじ
のリード
mm
05
TSLH120M
10
0.001
05
0.010
±0.002
0.001
0.030
0.035
0.020
0.015
0.020
0.020
0.005
0.010
0.025
0.010
0.015
0.025
±0.002
TSLH220M
10
0.001
0.030
05
TSLH320M
10
■最高速度
表3 最高速度
モータの種類
ACサーボ
モータ
05
最高速度 mm/s
モータ回転数
r/min
リード5mm
リード10mm
単軸仕様
二軸仕様
TSLH120M
TSLH220M
TSLH320M
TSLH420M
TSLH120M
TSLH220M
TSLH320M
CTLH120M
CTLH220M
3000
250
500
CTLH320M
2690
224
448
CTLH120M
CTLH220M
CTLH320M
1800
150
300
TSLH420M
10
0
100
200
300
400
500
600
800
0
200
280
230
83
81
49
48
34
34
27
27
22
22
18
18
14
14
11
11
400
600
0
180
150
110
77
72
63
47
46
37
34
33
26
26
26
20
22
21
16
18
18
14
14
14
11
11
11
8.5
200
400
110
92
59
51
36
34
26
25
20
20
16
16
14
14
11
10
8.5
8.5
600
0
200
67
410
410
44
220
220
31
140
140
24
100
100
19
82
82
16
68
67
13
58
57
10
44
44
8.4
36
36
400
600
0
410
360
270
210
200
170
140
130
110
100
100
79
81
80
62
67
67
51
57
57
44
44
44
34
36
36
27
200
400
270
240
160
140
110
100
78
76
62
61
51
50
44
43
34
33
27
27
600
0
200
190
820
820
130
730
720
93
500
490
72
380
380
59
300
300
49
260
250
42
220
220
33
170
170
27
140
140
400
600
820
820
700
670
490
480
370
370
300
300
250
250
220
220
170
170
140
140
0
200
400
380
380
380
380
380
380
380
370
360
290
280
280
230
230
230
190
190
190
170
170
160
130
130
130
110
110
110
600
0
380
800
380
800
330
560
270
440
220
360
190
300
160
260
130
210
110
170
200
400
600
800
800
800
790
770
750
560
560
550
440
430
430
360
360
350
300
300
300
260
260
260
210
210
210
170
170
170
0
200
360
360
360
360
360
360
330
330
270
270
230
230
200
200
160
160
130
130
400
600
360
360
360
360
360
360
320
310
270
260
230
220
200
190
160
150
130
130
1000
備考1. 各大きさの最高速度、加減速時間0.2sで連続運転した時に、ボールねじ又は直動案内機器の定格寿命が18000時間となる
質量を基準に算出しています。
2. 二軸仕様のテーブルは、各軸について搭載質量を検討してください。
備考 標準モータを使用した時の値です。実際の最高速度は使用モータや負荷条件などに応じた運転パターンの検討が必要です。
132
133
電装システム
ステッピング
モータ
大きさ
長さ寸法 L
mm
高さ寸法
H
mm
TSLH…M・CTLH…M 《高剛性シリーズ》
TSLH120M
X軸
繰返し
位置決め精度
H
大きさ
単位
ストローク長さ
■直動案内部の仕様
■テーブルイナーシャと起動トルク
表5 直動案内部の仕様
表7 テーブルイナーシャと起動トルク
大きさ
スライドユニット2
ストローク長さ
mm
X軸
Y軸
スライドユニット1
100
150
200
250
300
150
200
250
300
400
300
400
500
500
600
800
L
L /2
TSLH120M
X
L /2
0
スライドユニット4
ë/2
ë/2
単
軸
仕
様
スライドユニット3
TSLH220M
ë
TSLH320M
Z
Z
TSLH420M
駆動位置(Yd、Zd)
X
0
CTLH120M
配置
基本動定格荷重
(1) 基本静定格荷重(1)
大きさ
TSLH120M
TSLH220M
TSLH320M
TSLH420M
Y
0
C
N
C0
N
6260
11600
25200
30800
8330
13400
28800
38300
Yd
Zd
mm
ë
mm
mm
mm
88
157
240
300
82
145
210
290
0
0
0
0
2
1
6
0
L
注
(1) スライドユニット1個当りの値です。
二
軸
仕
様
CTLH220M
CTLH320M
100
200
200
300
300
200
300
300
400
400
300
400
400
500
500
100
100
200
200
300
200
200
300
300
400
300
300
400
400
500
テーブルイナーシャ J T
×10−5kg・m2
リード5mm
リード10mm
1.2
1.4
1.5
1.7
1.9
5.1
5.7
6.3
7.0
8.2
20
23
26
30
33
39
1.8
2.2
2.3
2.7
2.8
7.8
9.1
9.3
11
11
27
30
30
33
34
1.7
1.9
2.1
2.3
2.5
6.9
7.5
8.1
8.7
10
26
29
32
39
42
48
4.2
4.5
5.1
5.5
6.0
16
17
18
19
21
51
54
57
60
62
起動トルク T 0
N・m
リード5mm リード10mm
0.07
0.12
0.20
0.22
TSLH…M・CTLH…M 《高剛性シリーズ》
Y
0.08
0.12
0.22
0.25
備考 二軸仕様のテーブルは、X軸の値を示します。Y軸の値は単軸仕様のテーブルをご参照ください。
■ボールねじの仕様
表6 ボールねじの仕様
大きさ
ボールねじ
の種類
TSLH120M
研削ねじ
TSLH220M
研削ねじ
TSLH320M
TSLH420M
研削ねじ
リード
mm
5
10
5
10
5
10
ねじ外径
mm
軸方向すきま
mm
15
0
20
0
25
0
基本動定格荷重
基本静定格荷重
C
N
C0
N
7070
7070
8230
10900
16700
15800
12800
12800
17150
21700
43500
32700
電装システム
134
135
センサ仕様
精密位置決めテーブルLH<高剛性シリーズ>
TSLH120M
A
B
90
120
4-M5深10
100
4-M5深10
120
135
CCW
80
ON
原点
C
OFF
D
OFF
L
LM(2)
原点前
15
CCWリミット
ストローク長さ
(20)
S/2
135
S/2
(20)
12.5
A
100
A
12.5
65
メカストッパ
E
F
単位
大きさ
TSLH120M
TSLH220M
TSLH320M
TSLH420M
備考1.
2.
3.
4.
5
10
5
10
5
10
5
10
120
33
CWリミット
A
50
45
45
45
B
C
5
10
5
10
5
10
5
10
3
7
3
7
3
7
3
7
D
30
30
30
30
E
5.5
mm
12
OFF
ボールねじの
リード
TSLH…M・CTLH…M 《高剛性シリーズ》
CW
(35.7)
表8 センサのタイミングチャート
8-M5用穴
F
4.5
14
12
20
20
10
10
15
15
18
15
各センサの仕様については総合解説のセンサ仕様の項をご参照ください。
二軸仕様のテーブルは、各軸とも単軸仕様のテーブルと同一です。
ジャバラ付きテーブルの場合は、表中の値は適用しません。
ACサーボモータを選択した場合、原点センサは付いていません。原点信号はエンコーダのC相又はZ相信号を使用して
ください。
単位
呼び番号
TSLH120M-100
TSLH120M-150
TSLH120M-200
TSLH120M-250
TSLH120M-300
ストローク長さ
全長
ベッド取付穴
S
L
A
100
150
200
250
300
275
325
375
425
475
75
100
125
150
175
mm
質量(1)(参考)
kg
9.8
10.8
11.9
12.9
14.0
注(1) モータの質量は含まれていません。
(2) 電装システムのモータ仕様の項をご参照ください。
電装システム
136
137
精密位置決めテーブルLH<高剛性シリーズ>
精密位置決めテーブルLH<高剛性シリーズ>
TSLH220M
TSLH320M
4-M10深20
4-M8深16
280
290
320
290
180
4-M5深10
100
180
190
220
190
TSLH…M・CTLH…M 《高剛性シリーズ》
4-M8深16
120
190
L
2
LM( )
L
15
LM(2)
15
S/2
220
S/2
A
180
A
(15)
(15)
S/2
320
S/2
A
280
A
(15)
25
n-M8用穴
単位
呼び番号
TSLH220M-150
TSLH220M-200
TSLH220M-250
TSLH220M-300
TSLH220M-400
(TSLH220M-500)
(TSLH220M-600)
ストローク長さ
全長
S
L
150
200
250
300
400
500
600
400
450
500
550
650
750
850
注
(1) モータの質量は含まれていません。
(2) 電装システムのモータ仕様の項をご参照ください。
備考 ( )内に示す呼び番号の製品をご要望の際は、
ベッド取付穴
A(個数×ピッチ)
85
110
135
160
210(2×105)
260(2×130)
310(2×155)
n
8
8
8
8
12
12
12
25
25
n-M10用穴
単位
mm
質量(1)(参考)
kg
31.1
33.3
35.5
37.6
42.0
46.4
50.8
25
25
18
90
120
60
47
(15)
呼び番号
TSLH320M- 300
TSLH320M- 400
TSLH320M- 500
(TSLH320M- 600)
(TSLH320M- 800)
(TSLH320M-1000)
ストローク長さ
全長
S
L
300
400
500
600
800
1000
650
750
850
950
1150
1350
注(1) モータの質量は含まれていません。
(2) 電装システムのモータ仕様の項をご参照ください。
備考 ( )内に示す呼び番号の製品をご要望の際は、
ベッド取付穴
A(個数×ピッチ)
160
210
260
310
410(2×205)
510(2×255)
n
8
8
8
8
12
12
mm
質量
(1 )
(参考)
kg
99.5
109
118
127
146
164
にお問い合わせください。
にお問い合わせください。
電装システム
138
139
精密位置決めテーブルLH<高剛性シリーズ>
精密位置決めテーブルLH<高剛性シリーズ>
4-M5深10
280
290
80
120
120
380
LY
90
135
390
420
4-M10深20
390
TSLH…M・CTLH…M 《高剛性シリーズ》
4-M10深20
15 LM
(2)
CTLH120M
(35.7)
TSLH420M
100
8-M5用穴
LM(2)
L
4-M5深10
15
(35.7)
S/2
420
S/2
A
380
A
(15)
120
n-M10用穴
12
35
65
30
35
130
140
74
(15)
135
12.5
A
100
A
12.5
LX
LM(2)
15
単位
呼び番号
TSLH420M- 500
TSLH420M- 600
TSLH420M- 800
(TSLH420M-1000)
ストローク長さ
全長
S
L
500
600
800
1000
950
1050
1250
1450
注
(1) モータの質量は含まれていません。
(2) 電装システムのモータ仕様の項をご参照ください。
備考 ( )内に示す呼び番号の製品をご要望の際は、
ベッド取付穴
A(個数×ピッチ)
250
300
400(2×200)
500(2×250)
にお問い合わせください。
n
8
8
12
12
176
188
212
237
単位
mm
質量(1)(参考)
kg
呼び番号
CTLH120M-1010
CTLH120M-2010
CTLH120M-2020
CTLH120M-3020
CTLH120M-3030
ストローク長さ S
X軸
Y軸
100
200
200
300
300
100
100
200
200
300
全長
Lx
275
375
375
475
475
Ly
275
275
375
375
475
注(1) モータの質量は含まれていません。
(2) 電装システムのモータ仕様の項をご参照ください。
備考 上記以外のストローク長さや、異なる大きさのテーブルの組合せも可能ですので、
mm
A
質量(1)(参考)
kg
75
125
125
175
175
19.6
21.7
23.8
25.8
27.9
ベッド取付穴
にお問い合わせください。
電装システム
140
141
精密位置決めテーブルLH<高剛性シリーズ>
精密位置決めテーブルLH<高剛性シリーズ>
CTLH320M
15 LM
(2)
4-M8深16
4-M5深10
290
290
320
LY
120
190
190
LY
220
190
180
100
180
280
n-M8用穴
8-M10用穴
4-M8深16
4-M10深20
220
A
180
LX
18
120
90
180
240
320
18
A
25
A
25
25
A
280
25
LM(2)
LX
LM(2)
15
15
単位
呼び番号
CTLH220M-2020
CTLH220M-3020
CTLH220M-3030
CTLH220M-4030
CTLH220M-4040
ストローク長さ S
X軸
Y軸
200
300
300
400
400
200
200
300
300
400
全長
Lx
450
550
550
650
650
TSLH…M・CTLH…M 《高剛性シリーズ》
(2)
15 LM
CTLH220M
ベッド取付穴
Ly
450
450
550
550
650
A(個数×ピッチ)
110
160
160
210(2×105)
210(2×105)
注
(1) モータの質量は含まれていません。
(2) 電装システムのモータ仕様の項をご参照ください。
備考 上記以外のストローク長さや、異なる大きさのテーブルの組合せも可能ですので、
n
8
8
8
12
12
単位
mm
質量(1)(参考)
kg
呼び番号
66.5
70.9
75.3
79.7
84.0
CTLH320M-3030
CTLH320M-4030
CTLH320M-4040
CTLH320M-5040
CTLH320M-5050
にお問い合わせください。
ストローク長さ S
X軸
Y軸
300
400
400
500
500
300
300
400
400
500
全長
Lx
650
750
750
850
850
Ly
650
650
750
750
850
注(1) モータの質量は含まれていません。
(2) 電装システムのモータ仕様の項をご参照ください。
備考 上記以外のストローク長さや、異なる大きさのテーブルの組合せも可能ですので、
mm
A
質量(1)(参考)
kg
160
210
210
260
260
199
208
217
227
236
ベッド取付穴
にお問い合わせください。
電装システム
142
143
精密位置決めテーブルLH<高剛性シリーズ>
精密位置決めテーブルLH<高剛性シリーズ>
TSLH120M…J ジャバラ付きテーブル
4-M5深10
100
135
W
TSLH…M・CTLH…M 《高剛性シリーズ》
(35.7)
120
TSLH220M…J、TSLH320M…J、TSLH420M…J ジャバラ付きテーブル
(t1)
(7.3)
L
LM(1)
L
1
LM( )
15
15
(t2) E
S/2
135
S/2
E (2.3)
S /2
W
E (t2)
W
150
75
H
(2.3) E
S /2
単位
呼び番号
TSLH120M-100…J
TSLH120M-150…J
TSLH120M-200…J
TSLH120M-250…J
TSLH120M-300…J
ストローク長さ
全長
S
L
85
125
165
205
240
275
325
375
425
475
注
(1) 電装システムのモータ仕様の項をご参照ください。
備考1. 立軸使用する場合にはジャバラの寸法が異なりますので、
にお問い合わせください。
2. ベッドの取付寸法については、TSLH120Mの寸法表をご参照ください。
単位
mm
E
呼び番号
27.5
32.5
37.5
42.5
50.0
TSLH220M- 150…J
TSLH220M- 200…J
TSLH220M- 250…J
TSLH220M- 300…J
TSLH220M- 400…J
(TSLH220M- 500…J)
(TSLH220M- 600…J)
TSLH320M- 300…J
TSLH320M- 400…J
TSLH320M- 500…J
(TSLH320M- 600…J)
(TSLH320M- 800…J)
(TSLH320M-1000…J)
TSLH420M- 500…J
TSLH420M- 600…J
TSLH420M- 800…J
(TSLH420M-1000…J)
ストローク長さ
全長
S
L
110
150
180
220
300
370
440
230
310
400
480
640
800
410
500
660
830
400
450
500
550
650
750
850
650
750
850
950
1150
1350
950
1050
1250
1450
W
H
220
90
320
120
420
140
E
35
40
50
55
65
80
95
50
60
65
75
95
115
60
65
85
100
mm
t1
t2
8.2
3.2
9.2
3.2
10.5
4.5
144
電装システム
注(1) 電装システムのモータ仕様の項をご参照ください。
備考1. 立軸使用する場合にはジャバラの寸法が異なりますので、
にお問い合わせください。
2. ( )内に示す呼び番号の製品をご要望の際は、
にお問い合わせください。
3. 取付寸法については、TSLH220M、TSLH320M、TSLH420Mの寸法表をご参照ください。
145
TX・CTX の特長
TX
CTX
高精密位置決めテーブル TX
1
直動案内部に、
リニアローラウェイスーパー X を使用。鋳鉄製のベッドとスライドテーブルを
組み合わせることで、高い剛性と負荷容量を実現しました。
2
シンプルなシステム構成が可能
精密位置決めテーブル LH
エアステージのように駆動用のエア供給装置などは不要です。システム構成がシンプルとなり、省
をベースに、円筒ころ(ローラ)を転動体に使用し直動案内機器では最高レベルの走行性能を持つ
スペースや装置コストの削減が可能です。
リニアローラウェイスーパーX を組み込み、フルクローズドループ制御により極めて高い精度を実現した
位置決めテーブルです。
テーブル幅寸法で 120mm から 420mm まで 4 つの大きさがあり、これらを組み合わせた二軸仕様
のテーブルもシリーズ化されています。
今まで転がり案内を使用できなかった、高い精度が要求される位置決め用途に最適です。
3
様々な環境で使用可能
真空グリースや
低発じんグリースを封入した仕様にも対応しますので、ご要望の際は
にお問い合わせください。
T X・CTX 《高精密シリーズ》
負荷荷重に対する変位量が少なく、搭載物の質量や、外部からの負荷が変動する用途にも高い安
定性を発揮します。
《高精密シリーズ》
高精密位置決めテーブル TX は、高精度・高剛性で高い実績のある
変動荷重にも高い安定性を発揮
AC サーボモータ
カップリング
スライドテーブル
ボールねじ
リニアエンコーダ
センサ
ヘ ッド
スケール
ベッド
Y テーブル
リニアローラウェイ
TX(単軸仕様)
CTX(二軸仕様)
電装システム
X テーブル
高精密位置決めテーブル TX の構造
146
147
呼び番号
呼び番号の配列例(単軸仕様)
TX
220
-
呼び番号の配列例(二軸仕様)
150
A
/
Y040
●
4 モータ(電装システム)付き
●
●
2 大きさ
●
●
5 モータの種類
●
●
3 ストローク長さ
●
●
6 ボールねじのリード
●
CTX 120 - 30 20
A
/
Y039 5 C
●
1 形式
●
●
5 モータ
(電装システム)
付き
●
●
2 大きさ
●
●
6 モータの種類
●
●
3 X軸ストローク長さ
●
●
7 ボールねじのリード
●
●
4 Y軸ストローク長さ
●
●
8 組合せ方向の指定
●
●
1 形式
●
TX:高精密位置決めテーブルTX(単軸仕様)
●
1 形式
●
CTX:高精密位置決めテーブルTX(二軸仕様)
●
2 大きさ
●
大きさはテーブル幅寸法を示しています。
表1に示す大きさから選択します。
●
2 大きさ
●
大きさはテーブル幅寸法を示しています。
表2に示す大きさから選択します。
●
3 ストローク長さ
●
表1に示すストローク長さから選択します。
T X・CTX 《高精密シリーズ》
●
1 形式
●
10
異なる大きさのテーブルを組み合わせることも可能です。
●
3 X軸ストローク長さ
●
●
4 Y軸ストローク長さ
●
表1 大きさとテーブル幅寸法及びストローク長さ
大きさ
テーブル幅
寸法
mm
TX120
TX220
TX320
TX420
120
220
320
420
表2に示すストローク長さの組合せから選択します。
それぞれの軸のストローク長さをcm単位で表示します。X、Y軸で指定できる長さが異なります。
ストローク長さ
mm
100
150
300
500
●
4 モータ(電装システム)付き
●
150
200
400
600
200
250
500
800
表2 大きさとテーブル幅寸法及びストローク長さ
250
300
―
―
300
400
―
―
大きさ
テーブル幅
寸法
mm
CTX120
120
CTX220
220
A:モータ(電装システム)付き
高精密位置決めテーブルは高精度なフルクローズドループ制御を行うため、電装システム(テーブル本体、ACサーボモータ、
ドライバ、シリアル変換ユニット、モータコード、エンコーダコード、シリアル変換コード)が付属します。
●
5 モータの種類
●
ACサーボモータから選択します。
359ページをご参照ください。
●
6 ボールねじのリード
●
5:リード 5mm
10:リード10mm
●
5 モータ(電装システム)付き
●
ストローク長さ
mm
X軸
100
200
200
300
200
300
300
400
Y軸
100
100
200
200
200
200
300
300
A:モータ(電装システム)付き
高精密位置決めテーブルは高精度なフルクローズドループ制御を行うため、電装システム(テーブル本体、ACサーボモータ、
ドライバ、シリアル変換ユニット、モータコード、エンコーダコード、シリアル変換コード)が付属します。
ACサーボモータから選択します。
359ページをご参照ください。
●
7 ボールねじのリード
●
5:リード 5mm
10:リード10mm
●
8 組合せ方向の指定
●
無記号:正方向
C
:逆方向
電装システム
●
6 モータの種類
●
正方向:X軸モータを手前側に見て、Y軸モータが右側にくる組合せの方向。
逆方向:X軸モータを手前側に見て、Y軸モータが左側にくる組合せの方向。
148
149
諸特性
■精度
■最大搭載質量
表3 精度
X軸
TX220
0.003
±0.0005
二
軸
仕
様
CTX220
05
0.003
06
0.004
150
200
250
0.003
0.005
05
0.003
0.004
0.006
06
0.004
300
400
0.005
0.007
07
0.005
0.001
0.006
0.007
06
07
0.004
0.005
0.001
0.007
0.008
07
08
0.005
0.006
0.009
09
0.008
±0.0005
0.001
表5 最大搭載質量
XY運動の
直角度
L
搭載質量W
―
0.001
0.006
―
単位 kg
0.004
0.005
0.005
0.006
800
CTX120
0.005
0.004
500
600
TX420
テーブル運動 姿勢精度
(1) 垂直真直度
の平行度A
秒
水平真直度
250
300
300
400
500
TX320
ロスト
モーション
±0.0005
±0.0005
0.008
100
200
100
100
200
300
200
200
200
200
300
300
200
300
0.006
400
300
0.008
―
―
0.005
0.005
±0.0005
0.001
0.008
08
0.005
0.009
09
0.006
0.011
11
0.008
大きさ
05
TX120
0.010
10
0.005
±0.0005
0.001
ボールねじの
リード
mm
0.010
05
注
(1) ピッチング及びヨーイングを示します。
TX220
■最高速度
10
高精密位置決めテーブルTXは、ボールねじのリード及びドライバパラメータの電子ギアの設定によっ
て分解能と最高速度が異なります。表4に示す最高速度の範囲内でご使用ください。
05
表4 最高速度
ボールねじの
リード
mm
05
10
最高速度
電子ギア
分母
01
02
1
1
04
08
16
1
1
1
01
02
1
1
15.6
31.2
04
08
16
1
1
1
62.5
125
250
32
1
500(448)
mm/sec
62.5
125
250(224)
備考1. ( )内の値はTX320及びTX420に適用します。
2. 実際の最高速度は負荷条件などに応じて変わります。
3. 分解能は以下の式で求められます。なお、スケールピッチは4
[μm]です。
150
分解能=
10
15.6
31.2
スケールピッチ
電子ギア分子
×
[μm]
256
電子ギア分母
05
TX420
10
0
100
200
300
400
500
600
800
1000
000
200
400
600
000
200
400
600
000
200
400
600
000
200
400
600
000
200
400
600
000
200
400
600
000
200
400
600
000
200
400
600
310
260
200
160
180
150
100
75
410
410
410
410
270
270
270
230
820
820
820
820
380
380
380
380
800
800
800
800
360
360
360
360
94
92
87
80
74
67
58
50
260
260
250
230
210
190
170
150
820
820
820
820
380
380
380
380
800
800
800
800
360
360
360
360
55
55
53
52
43
42
39
35
170
170
160
160
130
130
120
110
620
620
610
600
380
380
380
380
800
800
800
800
360
360
360
360
39
39
38
38
30
30
29
27
120
120
120
120
96
95
91
87
470
470
470
460
370
360
350
340
660
650
650
640
360
360
360
360
30
30
30
30
24
23
23
22
97
97
96
95
76
75
73
71
380
380
380
370
300
290
290
280
540
530
530
530
360
360
360
360
25
25
25
24
19
19
19
18
80
80
80
79
63
62
61
60
320
320
320
320
250
250
240
240
450
450
450
450
350
350
350
340
21
21
21
21
16
16
16
16
68
68
68
68
53
53
52
51
270
270
270
270
210
210
210
210
390
390
390
390
310
300
300
300
16
16
16
16
12
12
12
12
53
53
53
53
41
41
41
40
210
210
210
210
170
170
160
160
310
310
310
310
240
240
240
240
13
13
13
13
10
10
9.9
9.8
43
43
43
43
33
33
33
33
180
180
180
180
140
140
140
130
250
250
250
250
200
200
200
200
備考1. 各大きさの最高速度、加減速時間0.2sで連続運転した時に、ボールねじ又は直動案内機器の定格寿命が18000時間とな
る質量を基準に算出しています。
2. 二軸仕様のテーブルは、各軸について搭載質量を検討してください。
151
電装システム
分子
TX320
長さ寸法 L
mm
高さ寸法
H
mm
T X・CTX 《高精密シリーズ》
100
150
200
TX120
単
軸
仕
様
Y軸
繰返し
位置決め精度
位置決め精度
H
大きさ
単位 mm
ストローク長さ
■直動案内部の仕様
■テーブルイナーシャと起動トルク
表6 直動案内部の仕様
表8 テーブルイナーシャと起動トルク
スライドユニット2
スライドユニット1
Y
大きさ
ストローク長さ
mm
L
L/2
TX120
スライドユニット2
ë/2 ë/2
スライドユニット3
ë
Z
Z
X
0
単
軸
仕
様
駆動位置(Yd,Zd)
TX220
Y
0
TX320
1
配置
1
基本動定格荷重
( ) 基本静定格荷重( )
大きさ
TX120
TX220
TX320
TX420
C
N
C0
N
5890
11500
32100
38200
10400
20000
56300
70300
Yd
Zd
mm
ë
mm
mm
mm
088
157
240
300
082
145
210
290
0
0
0
0
2
1
6
0
L
注
(1) スライドユニット1個当りの値です。
TX420
CTX120
二
軸
仕
様
CTX220
■ボールねじの仕様
ボールねじ
の種類
TX120
研削ねじ
TX220
研削ねじ
TX320
TX420
研削ねじ
リード
10mm
100
100
200
200
200
200
300
300
1.3
1.5
1.6
1.8
2.0
5.2
5.8
6.4
7.1
8.3
20
23
26
30
33
39
2.1
2.4
2.5
2.9
8.2
9.5
9.8
11.0
1.8
2.0
2.2
2.4
2.6
7.0
7.6
8.2
8.8
10
26
29
32
39
42
48
4.7
5.1
5.8
6.2
16.9
18.1
19.3
20.5
100
200
200
300
200
300
300
400
起動トルク T0
0.29
0.07
0.85
0.12
0.85
0.26
0.85
0.30
0.29
0.07
0.85
0.13
N・m
備考 二軸仕様のテーブルは、X軸の値を示します。Y軸の値は単軸仕様のテーブルをご参照ください。
表7 ボールねじの仕様
大きさ
リード
5mm
100
150
200
250
300
150
200
250
300
400
300
400
500
500
600
800
X
0
Y軸
カップリング
イナーシャ J C
×10−5kg・m2
T X・CTX 《高精密シリーズ》
L/2
X軸
テーブルイナーシャ J T
×10−5kg・m2
リード
mm
5
10
5
10
5
10
ねじ外径
mm
軸方向すきま
mm
15
0
20
0
25
0
基本動定格荷重
基本静定格荷重
C
N
C0
N
7070
7070
8230
10900
16700
15800
12800
12800
17150
21700
43500
32700
電装システム
152
153
センサ仕様
電装システム
表9 センサのタイミングチャート
■システム構成
CW
表10 システム構成
A
C
OFF
OFF
OFF
S/2(1)
S/2(1)
E
● ティーチングボックス ●
i
u
原点(リニアエンコーダ)
原点前(フォトセンサ)
CCWリミット(フォトセンサ)
CWリミット(フォトセンサ)
メカストッパ
大きさ
TX120
TX220
TX320
TX420
05
10
05
10
05
10
05
10
9
●
o
2.
w
●
CTX(二軸仕様)
r
●
F
A
C
1
L/2( )
L/2(1)
L/2(1)
L/2(1)
3
7
3
7
3
7
3
7
注
(1) 156〜159ページの寸法をご参照ください。
備考1.
TX(単軸仕様)
e ドライバ
●
単位
ボールねじの
リード
q 高精密位置決めテーブルTX
●
プログラムコントローラ
CTN480G
TAE10M5-TB
各センサの仕様については総合解説のセンサ仕様の項をご参照ください。
二軸仕様のテーブルは、各軸とも単軸仕様のテーブルと同一です。
E
mm
F
05.5
04.5
14.0
12.0
10.0
10.0
名称
q高精密位置決めテーブルTX
18.0
15.0
15.0
ブレーキ付き
モータ
(2)
ユニット
!0
●
AC200〜230V
モータ記号
()
TX120
TX220
TX320
TX420
Y039
Y040
Y041
Y042
wモータコード
(1 )
モータ
● シリアル変換
t
形式
1
ブレーキなし
20.0
y
●
(3)
DC電源 ●
!0
24V
モータ記号
(1 )
wモータコード
()
1
eドライバ
()
1
JZSP-CSM02-03-E
Y043
Y044
CTX120
JZSP-CSM03-03-E
Y045
JZSP-CSM12-03-E
SGDS-02A02A-E SGDS-04A02A-E
rエンコーダコード(1)
JZSP-CSP01-03-E
tシリアル変換ユニット(1)
JZDP-D003-000-E
yシリアル変換ユニットコード
(1)
JZSP-CLP70-03-E
Y046
JZSP-CSM13-03-E
SGDS-08A02A-E
CTX220
Y039
Y040
JZSP-CSM02-03-E
2本
Y043
Y044
JZSP-CSM12-03-E
2本
SGDS-02A02A-E SGDS-04A02A-E
2台
2台
JZSP-CSP01-03-E
2本
JZDP-D003-000-E
2個
JZSP-CLP70-03-E
2本
uプログラムコントローラ
iティーチングボックス
CTN480G
TAE10M5-TB
oパルス・リミットコード
!0電源コード
TAE10M7-LD□□(TAE10M8-LD□□)
お客様でご用意ください
155
電装システム
注(1) ㈱安川電機製のACサーボモータ、モータコード、ドライバ、エンコーダコード、シリアル変換ユニット、シリアル変換
ユニットコードが付属しています。
(2) ブレーキ付きモータは別途、ブレーキ解除用電源が必要となります。
(3) DC24V電源は、別途お客様にてご用意ください。
備考1. 二軸仕様のブレーキ付きテーブルは、Y軸だけがブレーキ付きモータになります。
例えば、Y043を選択した場合は、X軸にY039、Y軸にY043モータがそれぞれ組み合わされます。
2. モータコード、エンコーダコードの長さは3mです。
3. パルス・リミットコードの( )内は耐屈曲性に優れたコードです。
4. パルス・リミットコードのリミットコード部の長さは形式末尾の□□にて、最大20mまで1m単位で指定します。
4. ※コード長さが10m未満の場合も、2桁で指定します。(3mの場合の例:TAE10M7-LD03)
5. パルス・リミットコードのパルスコード部の長さは1.5mです。
6. 二軸仕様はパルス・リミットコードが2本必要です。
154
T X・CTX 《高精密シリーズ》
高精密位置決めテーブルTXは高精度なフルクローズドループ制御を行うため、各テーブル本体に最適
な電装装置(ACサーボモータ、モータコード、ドライバ、エンコーダコード、シリアル変換ユニット、
シリアル変換ユニットコード)が付属しています。上位コントローラ、パルス・リミットコードなどは、
用途に合わせてお客様でご用意ください。
ドライバの仕様については、379ページをご参照ください。
CCW
高精密位置決めテーブルTX<高精密シリーズ>
高精密位置決めテーブルTX<高精密シリーズ>
TX220
100
A
12.5
120
(15)
(43.2)
25
8-M5用穴
呼び番号
S
L
A
100
150
200
250
300
275
325
375
425
475
075
100
125
150
175
11.3
12.9
14.0
15.3
16.7
注
(1) モータの質量は含まれていません。
(2) 電装システムのモータ仕様の項をご参照ください。
220
S/2
A
180
A
(15)
45
ベッド取付穴
220
n-M8用穴
25
単位
mm
質量
(1)
(参考)
kg
全長
S/2
9.4
18
A
52.5
47
(20)
LM(2)
15
65
S/2
12
6.6
135
単位
TX120-100
TX120-150
TX120-200
TX120-250
TX120-300
W(2)
LM(2)
21
S/2
ストローク長さ
180
100
120
190
L
33
12.5
220
190
W(2)
100
90
80
120
L
(20)
4-M5深さ10
4-M8深さ16
4-M5深さ10
T X・CTX 《高精密シリーズ》
135
120
4-M5深さ10
90
TX120
呼び番号
TX220-150
TX220-200
TX220-250
TX220-300
TX220-400
ストローク長さ
全長
S
L
150
200
250
300
400
400
450
500
550
650
ベッド取付穴
A
(個数×ピッチ)
085
110
135
160
210
(2×105)
n
08
08
08
08
12
mm
質量(1)
(参考)
kg
33.6
36.4
38.7
41.2
46.4
注(1) モータの質量は含まれていません。
(2) 電装システムのモータ仕様の項をご参照ください。
電装システム
156
157
高精密位置決めテーブルTX<高精密シリーズ>
高精密位置決めテーブルTX<高精密シリーズ>
TX420
A
280
A
(15)
320
45
(15)
8-M10用穴
25
35
単位
呼び番号
TX320-300
TX320-400
TX320-500
S
L
A
300
400
500
650
750
850
160
210
260
103.7
114.1
124.0
注
(1) モータの質量は含まれていません。
(2) 電装システムのモータ仕様の項をご参照ください。
W(2)
420
S/2
A
380
A
(15)
ベッド取付穴
35
420
45
n-M10用穴
単位
mm
質量
(1)
(参考)
kg
全長
S/2
74
S/2
14.2
25
320
LM(2)
15
120
S/2
ストローク長さ
380
280
LM(2)
15
60
25
420
390
280
180
320
290
W(2)
290
390
L
T X・CTX 《高精密シリーズ》
190
290
L
(15)
4-M10深さ20
4-M10深さ20
17
30
4-M8深さ16
4-M10深さ20
140
TX320
呼び番号
TX420-500
TX420-600
TX420-800
ストローク長さ
全長
S
L
500
600
800
950
1050
1250
ベッド取付穴
A
(個数×ピッチ)
250
300
400
(2×200)
n
08
08
12
mm
質量(1)
(参考)
kg
183.0
196.1
222.2
注(1) モータの質量は含まれていません。
(2) 電装システムのモータ仕様の項をご参照ください。
電装システム
158
159
高精密位置決めテーブルTX<高精密シリーズ>
高精密位置決めテーブルTX<高精密シリーズ>
CTX120
CTX220
15 LM(2)
W(2)
(35.7)
4-M5深さ10
(35.7)
120
190
190
LY
80
120
120
135
LY
4-M5深さ10
220
100
90
100
4-M5深さ10
T X・CTX 《高精密シリーズ》
21 LM(2)
W(2)
180
4-M8深さ16
8-M5用穴
n-M8用穴
220
135
65
90
18
25
12
130
180
120
A
180
A
LX
12.5
A
A
100
12.5
単位
LM(2)
21
LX
呼び番号
単位
呼び番号
CTX120-1010
CTX120-2010
CTX120-2020
CTX120-3020
ストローク長さ S
X軸
Y軸
100
200
200
300
100
100
200
200
全長
LX
275
375
375
475
mm
A
質量
(1)
(参考)
kg
075
125
125
175
22.6
25.3
28.0
30.7
ベッド取付穴
LY
275
275
375
375
25
LM(2)
15
注
(1) モータの質量は含まれていません。
(2) 電装システムのモータ仕様の項をご参照ください。
備考 上記以外のストローク長さや、異なる大きさのテーブルの組合せ、ケーブルベア仕様の製作も可能ですので、
お問い合わせください。
CTX220-2020
CTX220-3020
CTX220-3030
CTX220-4030
ストローク長さ S
X軸
Y軸
200
300
300
400
200
200
300
300
全長
LX
450
550
550
650
ベッド取付穴
LY
450
450
550
550
A(個数×ピッチ)
110
160
160
210
(2×105)
n
08
08
08
12
mm
質量(1)
(参考)
kg
72.8
77.6
82.4
87.6
注(1) モータの質量は含まれていません。
(2) 電装システムのモータ仕様の項をご参照ください。
備考 上記以外のストローク長さや、異なる大きさのテーブルの組合せ、ケーブルベア仕様の製作も可能ですので、
お問い合わせください。
に
に
電装システム
160
161
高いクリーン度
測定方法によるクリーン度評価において、TC…US はクラス 2( JIS
はクラス 3(JIS
B 9920 )、TC…U
B 9920)を達成。
TC 《クリーンテーブルシリーズ》
電装システム
162
163
TC 《クリーンテーブルシリーズ》
164
165
電装システム
注(1) モータ折返し仕様を含みます。
(2) TC60USの折返し仕様は、吸引量30NL/minでクラス2となります。移動速度500mm/s以下で使用する場合は吸引量
20NL/minでクラス2です。
備考1. クリーン度は、試験装置をクリーンルームと想定し、JIS B 9920に基づき評価しています。
2. 実測データは測定環境などの条件により変化することがあります。
TC 《クリーンテーブルシリーズ》
■ 省スペース化
モータ折返し仕様を選択することにより、
Cルーブ付きを選択することにより長期メンテナンスフリーが可能
ストロークはそのままにストローク方向の省スペース化を図ることができます
70
85
128
116
155〜443
195〜723
260〜814
電装システム
095〜600
25
166
50
167
呼び番号
表1.2
TC…US、TC…Uの呼び番号の配列例
トラックレール長さとストローク長さ(モータ折返し仕様)
大きさ
TC 60 U 590 A / Y028
G 20 2 R
Q
Cルーブなし
140( 30)200
( 90)260(150)320(210)380
(270)
−
−
−
200
( 80)260(140)320(200)380
(260)
−
−
180( 60)260
(140)340(220)420(300)500
(380)580
(460)660(540)
180( 45)260
(125)340(205)420(285)500
(365)580
(445)660(525)
(495)744
(595)
−
244( 95)344
(195)444(295)544(395)644
244( 80)344
(180)444(280)544(380)644
(480)744
(580)
−
244(100)344
(200)444(300)544(400)644
(500)744
(600)
−
244( 65)344
(165)444(265)544(365)644
(465)744
(565)
−
TC40US
Cルーブ付き
Cルーブなし
●
6 ボールねじの種類
●
●
2 大きさ
●
●
7 ボールねじのリード
●
●
3 トラックレール長さ
●
●
8 センサ仕様
●
Cルーブ付き
TC60US
リード
5、10
Cルーブなし
リード
20
Cルーブなし
●
4 モータの有無
●
●
4 モータの有無
●
●
9 黒色クロム皮膜処理
●
●
5 モータの種類
●
●
10 モータ折返し仕様
●
Cルーブ付き
Cルーブ付き
無記号:モータなし
A
:モータ付き
お客様にてモータをご用意いただく場合には、モータなしを選定してください。
●
5 モータの種類
●
ACサーボモータをご指定の場合は360ページをご参照ください。
ステッピングモータをご指定の場合は366ページをご参照ください。
4 の指定をモータなし(無記号)とした場合、指定したモータに適応したモータアタッチメントとカップリング(プーリ(1))
●
●
11 Cルーブの指定
●
を取り付けて納入します。モータアタッチメントとカップリングが不要な場合は、無記号(2)としてください。
注(1) モータ折返し仕様に適用します。
注(2) TC…USには無記号の設定はありません。
●
1 形式
●
TC…US:クリーン精密位置決めテーブルTC(スリムタイプ)
TC…US:クリーン精密位置決めテーブルTC(幅広タイプ)
●
2 大きさ
●
30:トラックレール幅30mm
40:トラックレール幅40mm
50:トラックレール幅50mm
60:トラックレール幅60mm
86:トラックレール幅86mm
●
6 ボールねじの種類
●
G:研削ねじ
●
7 ボールねじのリード
●
表2に示すボールねじリードから選択し、mm単位で表示します。
表2 ボールねじリードの適用
ボールねじのリード mm
大きさ
●
3 トラックレール長さ
●
表1.1
大きさ
TC30US
TC60US
TC60U
140( 30)180( 70)220
(110)260(150)300(190)340
(230)
180( 30)240( 90)300
(150)360(210)420(270)
−
240( 80)300
(140)360(200)420(260)
220( 60)300(140)380
(220)460(300)540(380)620
(460)700(540)
(445)700(525)
220( 45)300(125)380
(205)460(285)540(365)620
290(100)390(200)490
(300)590(400)690(500)790
(600)
290( 85)390(185)490
(285)590(385)690(485)790
(585)
290( 95)390(195)490
(295)590(395)690(495)790
(595)
(570)
290( 70)390(170)490
(270)590(370)690(470)790
290(100)390(200)490
(300)590(400)690(500)790
(600)
290( 85)390(185)490
(285)590(385)690(485)790
(585)
290(100)390(200)490
(300)590(400)690(500)790
(600)
(570)
290( 70)390(170)490
(270)590(370)690(470)790
490(250)590(350)690
(450)790(550)890(650)990
(750)
490(230)590(330)690
(430)790(530)890(630)990
(730)
Cルーブなし
Cルーブ付き
リード
5、10
Cルーブなし
リード
20
Cルーブなし
リード
5、10
Cルーブなし
リード
20
Cルーブなし
Cルーブ付き
Cルーブ付き
Cルーブ付き
Cルーブ付き
Cルーブなし
Cルーブ付き
TC30US
TC40US
TC50US
TC60US
●
8 センサ仕様
●
TC60U
TC86U
4
5
8
10
20
−
○
−
−
−
○
−
○
○
−
−
○
−
−
−
−
−
○
○
○
−
−
−
○
○
0:センサなし、センサレールなし(1)
2:センサ2個(リミット)
3:センサ3個(リミット、原点前)
ACサーボモータ仕様に推奨
4:センサ4個(リミット、原点前、原点) ステッピングモータ仕様に推奨
9:センサなし、センサレール付き
センサの個数とセンサを固定するためのレールの有無を表示します。
注(1) TC60U、TC86Uには、適用しません。
備考 TC60U、TC86Uは、センサレール付きです。
電装システム
TC86U
トラックレール長さ(ストローク長さ)
Cルーブなし
Cルーブ付き
TC50US
単位 mm
Cルーブの仕様
Cルーブなし
TC40US
168
表1.1及び表1.2から選択し、mm単位で表示します。
トラックレール長さとストローク長さ
TC 《クリーンテーブルシリーズ》
トラックレール長さ(ストローク長さ)
TC50US
●
1 形式
●
単位 mm
Cルーブの仕様
169
諸特性
●
9 黒色クロム皮膜処理
●
無記号:スライドテーブルの表面に黒色クロム皮膜処理を施します。
R
:黒色クロム皮膜処理1
L
:黒色クロム皮膜処理2
表面に黒色の浸透性皮膜を形成することにより、耐食性を向上させます。
黒色クロム皮膜処理1:スライドテーブルとトラックレールの表面に処理を施します。
黒色クロム皮膜処理2:黒色クロム皮膜処理1に加えて、ボールねじの軸及びナットにも処理を施します。
●
10 モータ折返し仕様
●
表5 TC…USの精度
トラックレール長さ
を超え
以下
注
( ) TC40US、TC50US、TC60USに適用します。
無記号:Cルーブなし
Q
:Cルーブ付きテーブル
(1)
スライドテーブルとボールねじナットの端面にCルーブを取り付けます。
Cルーブ付きのテーブルは、ストローク長さがやや短くなるので注意が必要です。
Cルーブは連通多孔焼結樹脂に多量の潤滑油を含浸させた潤滑部品です。トラックレールやボールねじ軸の軌道面と接触して
摺動することで、Cルーブ内の潤滑油が常時適量しみ出して軌道面に供給されるので、給油間隔の延長によるメンテナンス工
数の削減が可能です。給油のしづらい箇所でのグリース消失対策に有効です。
注
(1) TC30USには、Cルーブ付き仕様はありません。
−
400
400
500
500
600
600
700
700
800
単位 mm
繰返し
位置決め精度
テーブル運動の
位置決め精度
()
平行度B
1
0.025
0.010
0.012
±0.002
(±0.020)
0.030
0.035
バックラッシ
(1)
0.003
0.015
TC 《クリーンテーブルシリーズ》
無記号 :モータ折返しなし
S(1) :モータ下方向折返し
M(1) :モータ右方向折返し
H(1):モータ左方向折返し
1
●
11 Cルーブの指定
●
■精度
1
注( ) モータ折返し仕様のテーブルには、適用しません。
備考1. ( )内の値は、モータ折返し仕様のテーブルに適用します。
2. モータ折返し仕様のテーブル精度は、タイミングベルトの張力が適正に調整されている場合に適用します。
表6 TC…Uの精度
トラックレール長さ
単位 mm
繰返し
位置決め精度
位置決め精度
290
390
0.020
490
590
690
990
バックラッシ
0.008
0.010
±0.002
0.025
0.003
0.012
790
890
テーブル運動の
平行度B
0.030
0.014
電装システム
170
171
■最高速度
■許容モーメントと許容搭載質量
表7 TC…USの最高速度
モータの種類
TC30US
TC40US
TC50US
TC60US
ステッピング
モータ
TC30US
TC40US
TC50US
TC60US
トラックレール長さ
mm
モータ回転数
r/min
340以下
420以下
620以下
690以下
790
340以下
420以下
620以下
790以下
3000
3000
3000
3000
2910
1800
1800
1800
1800
トラックレール長さ
mm
モータ回転数
r/min
リード5mm
リード10mm
リード20mm
690以下
790
790以下
890
990
790以下
990以下
3000
2910
3000
2760
2180
1800
1800
250
243
−
−
−
150
−
500
485
500
460
363
300
300
1000
970
1000
920
727
600
600
4
5
8
10
20
−
200
−
−
−
−
120
−
−
250
−
250
250
243
150
−
150
150
−
400
−
−
−
−
240
−
−
−
−
500
500
485
−
−
300
300
−
−
−
1000
970
−
−
−
600
クリーン精度位置決めテーブルTCに負荷できる荷重は、スライドテーブル案内の直動案内機器として
定格荷重よりも、スライドテーブルの曲げ強度やせん断強さの強度によることがあります。このため、
スライドテーブルに負荷を加えたときに一定の変位量になる負荷を許容モーメント、許容搭載質量とし
て定めています。
表10 許容モーメントと許容搭載質量
許容モーメント
N・m
大きさ
1.5
2.0
3.9
6.1
6.9
33.5
TC030US
TC040US
TC050US
TC060US
TC060U
TC086U
M
許容搭載質量
kg
TC 《クリーンテーブルシリーズ》
ACサーボ
モータ
大きさ
最高速度 mm/s
ボールねじのリード mm
6
9
14
18
25
50
表8 TC…Uの最高速度
モータの種類
大きさ
TC60U
ACサーボ
モータ
ステッピング
モータ
TC86U
TC60U
TC86U
最高速度 mm/s
M
M
テー
M
許容モーメントの方向
ブル
長さ
の幅
ルの
ブ
テー
許容搭載質量の範囲
電装システム
172
173
センサ仕様
■テーブルイナーシャと起動トルク
表12 TC…US、TC…Uのセンサのタイミングチャート
表11 テーブルイナーシャと起動トルク
大きさ
TC030US
TC050US
TC060US
TC060U
TC086U
140
180
220
260
300
340
180
(140)
240
(200)
300
(260)
360
(320)
420
(380)
220
(180)
300
(260)
380
(340)
460
(420)
540
(500)
620
(580)
700
(660)
290
(244)
390
(344)
490
(444)
590
(544)
690
(644)
790
(744)
290
390
490
590
690
790
490
590
690
790
890
990
4
−
−
−
−
−
−
0.070
0.089
0.110
0.130
0.150
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
2
テーブルイナーシャ J(
) ×10−5 kg・m2
T
ボールねじのリード mm
5
8
10
20
−
−
−
−
−
−
0.13
0.15
0.17
0.19
0.21
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
1.8
2.0
2.1
2.3
2.4
2.6
1.5
1.7
1.8
2.0
2.2
2.3
4.3
4.7
5.0
5.4
5.8
6.2
0.064
0.076
0.089
0.100
0.110
0.130
−
−
−
−
−
0.200
0.270
0.330
0.390
0.450
0.510
0.570
0.500
0.660
0.820
0.980
1.100
1.300
0.490
0.650
0.800
0.960
1.100
1.300
−
−
−
−
−
−
注
(1) モータ折返し仕様の場合、表中の数値に下記の値を加算してください。
注
(1) TC40US及びTC50US:0.28×10-5kg・m2、TC60US:1.5×10-5kg・m2
(2) モータ折返し仕様のテーブルは約2倍になります。
備考 ( )内の値はモータ折返し仕様の寸法です。
−
−
−
−
−
−
−
−
−
−
−
0.36
0.42
0.49
0.55
0.61
0.67
0.73
0.76
0.92
1.10
1.20
1.40
1.60
0.69
0.85
1.00
1.20
1.30
1.50
2.40
2.80
3.20
3.60
4.00
4.30
CW
3
起動トルク T(
)
0
N・m
CCW
CW
CCW
A
A
B
0.03
C
ON
原点
OFF
原点前
OFF
CCWリミット
ストローク長さ
OFF
B
C
ストローク長さ
OFF
CWリミット
0.07
原点
原点前
OFF
CCWリミット
CWリミット
メカストッパ
メカストッパ
D
ON
OFF
D
E
E
TC…US
TC…U
※モータ折返し仕様のテーブルは、スライドテーブルのCW方向とCCW方向の移動が逆になります。
大きさ
TC30US
0.09
TC40US
TC50US
TC60US
0.13
TC60U
TC86U
0.13
1
注( )
(2)
(3)
備考
A
ボールねじ
の
モータ折返しなし
モータ折返し仕様
リード
Cルーブなし Cルーブ付き Cルーブなし Cルーブ付き
5
4
8
5
10
5
10
20
5
10
20
10
20
(074)
−
−
−
(081)
(091)
(33)
(43)
(076)
(091)
(29)
(44)
(087)
(087)
(38)
(38)
(087)
(102)
(38)
(53)
103
103
−
−
103
118
−
−
108
108
−
−
単位
D
mm
B
C
E
3
2
6
3
7
3
7
14
3
7
14
7
14
10
10
08.0
10
10
08(1)
10
8
20
9
TC 《クリーンテーブルシリーズ》
TC040US
トラックレール長さ
mm
08.0
08.0
08(2)
20
9.6
07.0
07(3)
20
13
12
11
Cルーブ付きテーブルの場合は、5になります。
Cルーブ付きテーブルの場合は、10になります。
Cルーブ付きテーブルの場合は、9.4になります。
TC…USのセンサのタイミングチャートは、カバー組み付け後にお客様にて調整してください。
0.21
図1 センサ4個仕様のセンサ配置イメージ
電装システム
174
175
モータ折返し仕様
クリーン精密位置決めテーブルTC
TC30US
10
3.5
4-M4通
W(2)
40
5.5
センサレール断面
S
(43)
34
24
LM(2)
L
(64)
16
吸引用継手
(φ6チューブ用)
モータ下方向折返し
(記号:S)
25
6
40
38.5
60
(36)
W(2)
20
(43.5)
(58)
4
60
35
12
30
32
(36)
L1
単位
呼び番号
図2 モータ折返し仕様
TC30US140
TC30US180
TC30US220
TC30US260
TC30US300
TC30US340
トラックレール長さ
全長
L1
L
140
180
220
260
300
340
186
226
266
306
346
386
n
3
4
5
6
7
8
S
質量(1)
kg
30
70
110
150
190
230
1.0
1.1
1.2
1.3
1.4
1.5
ストローク長さ
TC 《クリーンテーブルシリーズ》
モータ左方向折返し
(記号:H)
モータ右方向折返し
(記号:M)
20
2×n-φ2.9
φ5深ざぐり深2.7
12
2.1 1.3
クリーン精密位置決めテーブルTC…USには、モータ折返し仕様を用意していますので、モータを折
り返してテーブルの全長を短くすることで、省スペース化を図ることが可能です。モータ折返し仕様の
寸法は、各寸法表をご参照ください。
トラックレールの長さの設定がモータ折返しなしのテーブルと異なるので注意が必要です。
mm
注(1) モータなしの場合の質量です。
(2) 電装システムのモータ仕様の項をご参照ください。
備考 センサの指定を4個にした場合は、センサーレールはテーブル両側に取り付けられます。
電装システム
176
177
クリーン精密位置決めテーブルTC
クリーン精密位置決めテーブルTC
TC40US
TC50US
10
5.5
1.3
3.5
20
12
2.1
W(3)
W(3)
50
10
2×n-φ4.5
φ8深ざぐり深4.1
60
4-M5通
20
4-M4通
12
2.1 1.3
3.5
2×n-φ3.4
φ6.5深ざぐり深3.1
TC 《クリーンテーブルシリーズ》
5.5
センサレール断面
センサレール断面
(66)
( )
7
S
(63)
54
40
LM(3)
4
60
呼び番号
TC40US180
TC40US240
TC40US300
TC40US360
TC40US420
全長
L1
L
180
240
300
360
420
203
263
323
383
443
注
(1)( )内の値はCルーブ付きテーブルのストローク長さです。
(2) モータなしの場合の質量です。
(3) 電装システムのモータ仕様の項をご参照ください。
(4) Cルーブ付きテーブルの場合は(81)となります。
n
3
4
5
6
7
ストローク長さ
(1)
S
30
90
( 80)
150
(140)
210
(200)
270
(260)
80
16
6
質量(2)
kg
1.9
2.2
2.5
2.8
3.1
(54.5)
35
25
50
吸引用継手
52
(φ6チューブ用) (56)
30
L1
8
単位
トラックレール長さ
W(3)
(85)
55.5
80
30
18
40
42
(46)
30
L1
(4)
30
8
(49)
W(3)
28.5
(60)
(75)
7
16
L
90
90
LM( )
(71)
(4)
吸引用継手
(φ6チューブ用)
9
L
70
S
(53)
44
30
3
単位
mm
呼び番号
TC50US220
TC50US300
TC50US380
TC50US460
TC50US540
TC50US620
TC50US700
トラックレール長さ
全長
L1
L
220
300
380
460
540
620
700
243
323
403
483
563
643
723
n
3
4
5
6
7
8
9
ストローク長さ(1)
S
60
( 45)
140
(125)
220
(205)
300
(285)
380
(365)
460
(445)
540
(525)
mm
質量(2)
kg
2.8
3.4
3.9
4.4
4.9
5.4
5.9
注(1)( )内の値はCルーブ付きテーブルのストローク長さです。
(2) モータなしの場合の質量です。
(3) 電装システムのモータ仕様の項をご参照ください。
(4) Cルーブ付きテーブルの場合は(81)となります。
電装システム
178
179
クリーン精密位置決めテーブルTC
モータ折返し仕様
L
110
LM(3)
W(3)
5.5
センサレール断面
(74)
66
46
LM(3)
7
(4)
(67)
20
66
20
W(3)
センサレール断面
L
L1
8
30
60
単位
呼び番号
TC60US290
TC60US390
TC60US490
TC60US590
TC60US690
TC60US790
全長
L1
L
290
390
490
590
690
790
314
414
514
614
714
814
n
3
4
5
6
7
8
注
(1)( )内の値はCルーブ付きテーブルのストローク長さです。
(2) モータなしの場合の質量です。
(3) 電装システムのモータ仕様の項をご参照ください。
(4) リード20mmのCルーブ付きテーブルの場合は(82)となります。
ストローク長さ(1)S
リード5、10
リード20
100
( 85)
200(185)
300(285)
400(385)
500(485)
600(585)
100( 70)
200(170)
300(270)
400(370)
500(470)
600(570)
単位
mm
質量
(2)
kg
4.8
6.2
7.4
8.5
9.5
10.5
40
L1
8
トラックレール長さ
80
28
60
吸引用継手
62
(φ6チューブ用) (66)
16
55
35
100
7
100
(75)
55
8
44
30
(23)
(4) 23
70
14
(60)
9
42
W(3)
(95)
S
呼び番号
TC40US140
TC40US200
TC40US260
TC40US320
TC40US380
TC 《クリーンテーブルシリーズ》
吸引用継手
(φ6チューブ用)
5.5
S
3.5
(53)
42
18
3.5
10
4-M4通
50
1.3
2×n-φ5.5
φ9.5深ざぐり深5.4
80
12
2.1 1.3
4-M5通
2×n-φ3.4
φ6.5深ざぐり深3.1
10
12
TC40US
(80)
132
(148)
TC60US
2.1
クリーン精密位置決めテーブルTC
トラックレール長さ
全長
L1
L
140
200
260
320
380
155
215
275
335
395
n
2
3
4
5
6
ストローク長さ(1)
S
30
(―)
90
( 80)
150
(140)
210
(200)
270
(260)
mm
質量(2)
kg
1.9
2.2
2.5
2.8
3.1
注(1)( )内の値はCルーブ付きテーブルのストローク長さです。
(2) モータなしの場合の質量です。
(3) 電装システムのモータ仕様の項をご参照ください。
(4) Cルーブ付きテーブルの場合は(33)となります。
電装システム
180
181
クリーン精密位置決めテーブルTC
クリーン精密位置決めテーブルTC
TC50US モータ折返し仕様
1.3
20
12
91
5.5
W(3)
5.5
センサレール断面
センサレール断面
LM(3)
L
66
46
L
54
40
(19)
(4)24
S
(18)
(4)24
110
8
30
55
単位
TC50US180
TC50US260
TC50US340
TC50US420
TC50US500
TC50US580
TC50US660
100
L1
8
トラックレール長さ
全長
L1
L
180
260
340
420
500
580
660
195
275
355
435
515
595
675
注
(1)( )内の値はCルーブ付きテーブルのストローク長さです。
(2) モータなしの場合の質量です。
(3) 電装システムのモータ仕様の項をご参照ください。
(4) Cルーブ付きテーブルの場合は(34)となります。
n
2
3
4
5
6
7
8
ストローク長さ
(1)
S
60
( 45)
140
(125)
220
(205)
300
(285)
380
(365)
460
(445)
540
(525)
質量(2)
kg
2.8
3.4
3.9
4.4
4.9
5.4
5.9
76
100
7
50
80
L1
呼び番号
76
(95)
90
55
(85)
7
90
(100)
158
(171)
20
12
(80)
132
(148)
(152.5)
2.1
66
(63)
52
25
W(3)
2×n-φ5.5
吸引用継手
φ9.5深ざぐり深5.4 (φ6チューブ用)
LM(3)
S
3.5
2.1
3.5
TC 《クリーンテーブルシリーズ》
吸引用継手
φ6チューブ用
10
4-M5通
80
10
4-M5通
1.3
60
モータ折返し仕様
(74)
62
28
2×n-φ4.5
φ8深ざぐり深4.1
TC60US
60
単位
mm
呼び番号
TC60US244
TC60US344
TC60US444
TC60US544
TC60US644
TC60US744
トラックレール長さ
全長
L1
L
244
344
444
544
644
744
260
360
460
560
660
760
n
2
3
4
5
6
7
ストローク長さ
(1)
S
リード5、10
リード20
95( 80)
195(180)
295(280)
395(380)
495(480)
595(580)
95( 65)
195(165)
295(265)
395(365)
495(465)
595(565)
mm
質量(2)
kg
4.8
6.2
7.4
8.5
9.5
10.5
注(1)( )内の値はCルーブ付きテーブルのストローク長さです。
(2) モータなしの場合の質量です。
(3) 電装システムのモータ仕様の項をご参照ください。
(4) リード20mmのCルーブ付きテーブルの場合は(33)となります。
電装システム
182
183
クリーン精密位置決めテーブルTC
クリーン精密位置決めテーブルTC
TC60U
TC86U
LM( )
2.5
50
4-M6深12
9.6
73
5
3
15
116
106
96
16
3-吸引用継手
(φ6チューブ用)
55
100
35
L1
8
85
17
70
8
28
60
74
105.2
88
21
35
L1
14
42
100
110
S
128
117
106
46
86
99
117
12.5
83( )
49.5
W(3)
4
(65)
62
55
8
W(3)
20.6
28 37.5
75
69.4
センサレール断面
4-M5深12
2×n -φ7
φ11深ざぐり深7
(77)
28
8
センサレール断面
W(3)
2×n -φ5.5
φ9.5深ざぐり深5.4
S
5
16
8
単位
呼び番号
TC60U290
TC60U390
TC60U490
TC60U590
TC60U690
TC60U790
トラックレール長さ
全長
L1
L
290
390
490
590
690
790
306
406
506
606
706
806
n
3
4
5
6
7
8
注
(1)( )内の値はCルーブ付きテーブルのストローク長さです。
(2) モータなしの場合の質量です。
(3) 電装システムのモータ仕様の項をご参照ください。
(4) リード20mmのCルーブ付きテーブルの場合は(98)となります。
ストローク長さ(1)S
リード5、10
リード20
100(185)
200(185)
300(285)
400(385)
500(485)
600(585)
100( 70)
200(170)
300(270)
400(370)
500(470)
600(570)
TC 《クリーンテーブルシリーズ》
W(3)
6
L
8-M5深8
3
LM(3)
2.5
5.5
3
8
13
L
6.5
5.2
6.3
7.4
8.5
9.7
10.8
単位
mm
質量
(2)
kg
3-吸引用継手
(φ6チューブ用)
呼び番号
TC86U490
TC86U590
TC86U690
TC86U790
TC86U890
TC86U990
トラックレール長さ
全長
L1
L
490
590
690
790
890
990
506
606
706
806
906
1006
n
5
6
7
8
9
10
ストローク長さ(1)
S
250(230)
350(330)
450(430)
550(530)
650(630)
750
(730)
mm
質量(2)
kg
13.3
15.3
17.2
19.1
21.1
23.0
注(1)( )内の値はCルーブ付きテーブルのストローク長さです。
(2) モータなしの場合の質量です。
(3) 電装システムのモータ仕様の項をご参照ください。
電装システム
184
185
TMの特長
TM
マイクロ精密位置決めテーブル TM
1
テーブル案内部にレール幅 2mm の S マイクロリニアウェイ L、送り機構にねじ径 2mm のミ
ニチュアボールねじを採用。 研削ボールねじ駆動では他に類例のない断面高さを実現しながらも、
なめらかで安定した摺動と走行精度、バックラッシが小さく追従性のよい高精度な位置決めを実現し
ます。
《マイクロテーブルシリーズ》
2
3
外形寸法はそのままで、原点・原点前・CW・CCW の各センサの内蔵を指定することができます。
マイクロリニアウェイ L、ボールねじなどの鋼製部品にはステンレス鋼を使用しており、耐食性に優れて
います。
各種機械装置の小型化・省スペース化などのニーズだけでなく、これまでの小形位置決めテーブルで
超小型センサも内蔵可能
4
超小型装置の位置決め機構の高精度化を実現
極小サイズながら高精度な位置決めを実現していますので、超小型装置の位置決め機構の高精度
化に最適です。
は満足することができなかった、さらに高い精度が要求される位置決めテーブルの用途に最適です。
5
優れた耐食性
鋼製部品にはステンレス鋼を使用しており、油分を嫌い防せい油の使用を控えたい箇所や水分の
飛散する環境での使用も可能です。
電装システム
マイクロ精密位置決めテーブル TM の構造
186
T M 《マイクロテーブルシリーズ》
位置決めテーブルです。
AC サーボモータとステッピングモータが選択可能
AC サーボモータとステッピングモータを用意していますので、用途に応じた選択が可能です。
マイクロ精密位置決めテーブル TM は、超小型装置の分野で定評のある、トラックレール幅 2mm の
S マイクロリニアウェイ L と、ねじ径 2mm の精密研削ボールねじを組み込んだ、極めて小形な精密
断面高さ 20mm、 幅 17mm の極小サイズを実現
187
呼び番号
諸特性
■精度
呼び番号の配列例
表1 精度
TM 15 - 20 A
/
T001 05 1
形式
単位 mm
ボールねじのリード
0.5
TM15
●
1 形式
●
●
5 モータの種類
●
●
2 大きさ
●
●
6 ボールねじのリード
●
±0.001
0.015
1
±0.002
■最高速度
表2 最高速度
形式
TM15
最高速度 mm/s
モータ回転数
r/min
モータ種類
リード0.5mm
リード1mm
ACサーボモータ
4000
33
67
ステッピングモータ
1800
15
30
●
7 センサ仕様・配線方向
●
●
4 モータ付き
●
繰返し位置決め精度
●
1 形式
●
TM:マイクロ精密位置決めテーブルTM
備考 標準モータを使用した時の値です。実際の最高速度は使用モータや負荷条件などに応じた運転パターンの検討が必要で
す。
●
2 大きさ
●
15:テーブル幅寸法 15mm
■耐荷重
●
3 ストローク長さ
●
20:ストローク長さ 20mm
●
4 モータ付き
●
A:モータ付き
表3 耐荷重
形式
耐荷重 N
TM15
15
T M 《マイクロテーブルシリーズ》
●
3 ストローク長さ
●
位置決め精度
備考 機能上、性能上支障なく使用することができる最大荷重です。
●
5 モータの種類
●
●
6 ボールねじのリード
●
●
7 センサ仕様・配線方向
●
T001:ACサーボモータ
モータの仕様の詳細は384〜392ページをご
T002:ステッピングモータ(5相)
参照ください。
T003:ステッピングモータ(2相)
05:リード0.5mm
10:リード1mm
0:センサなし
1:センサあり(反モータ側から見て右側に配置)
2:センサあり(反モータ側から見て左側に配置)
■テーブルイナーシャと起動トルク
表4 テーブルイナーシャと起動トルク
テーブルイナーシャ J T
×10−5kg・m2
形式
TM15
起動トルク T 0
N・m
リード0.5mm
リード1mm
0.00027
0.00029
0.005
センサなしを指定した場合、センサの後付けはできません。
センサありを指定した場合、モータ配線はセンサ配線方向と同じ方向になります。
備考 樹脂製のテーブルカバーを使用していますが、ステンレス製のテーブルカバーの製作も可能です。ご要望の際は、
Sにお問い合わせください。
電装システム
188
189
センサ仕様
電装システム
表5 センサのタイミングチャート
■システム構成
CW
マイクロ精密位置決めテーブルTMには専用のドライバが用意されており、システム構成を表6に示し
ます。ドライバの仕様については、385、388ページをご参照ください。ご注文の際は、表6に示す形式
にて別途ご指定ください。
CCW
26.8
0.5(リード1)、0.25(リード0.5)
表6 システム構成
●システム構成
ON 原点(ACサーボモータ C相)
w
3
ON
o
原点(ステッピングモータ)
i
TAMAGAWA
STATUS
r
CN9
0.2
BAT
CN2
SV-NET
e
q
T M 《マイクロテーブルシリーズ》
CN5
16
OFF
6
SENSOR
原点前
CN3
MOTOR
CN10
MONITOR
(2)
ストローク長さ+2
1
DC電源
24V
CWリミット
OFF
CWL
SVD-DW
PORG
CCWリミット
CCWL POWER
OFF
ORG
CN1
POWER
センサアンプ(1)
!1
!0
●ACサーボモータ用ドライバのパラメータ設定時のシステム構成
1
メカストッパ
o
備考1. 各センサの仕様については総合解説のセンサ仕様の項をご参照ください。
2. ACサーボモータを選択した場合、原点信号はエンコーダのC相またはZ相信号を使用してください。
w
PC
y
i
TAMAGAWA
t
STATUS
CN9
CN2
BAT
SV-NET
u
r
e
q
CN5
SENSOR
CN3
MOTOR
CN10
MONITOR
(2)
ハウジング
43020-0600 (日本モレックス㈱製)
ターミナル 6本
43031-0010 (日本モレックス㈱製)
32
No.
名
q
センサへ
(コード長さ500mm)
43
称
マイクロ精密位置決めテーブルTM
CWL
PORG
ORG
コード長さ:100mm
CCWL
POWER
DC電源
24V
10
モータ記号
w ドライバ
e モータコード
5
22
2-M3深さ2
6.5
30
r
t
y
u
i
o
レゾルバコード
通信ユニット
(3)
RS232Cコード
(3)
SV-NETコード
(3 )
プログラムコントローラ
ティーチングボックス
!0 パルス・リミットコード(4)
!1 電源コード
図1 センサアンプの外形寸法
2.
3.
2.
4.
CWL
センサアンプ(1)
!0
形式
TM15-20
T001
T002
T003
[ACサーボモータ] [ステッピングモータ
(5相)
]
[ステッピングモータ
(2相)
]
TA8410N7318E936
TD-5M13-L
eTD-24A
TAE20S6-SM0□
TAE20S8-SM0□
EU9614N□0
(TAE20S7-SN0□)
(TAE20S9-SN0□)
EU9615N□0
―
―
TA8433N1
―
―
EU6517N2
―
―
EU9610N20□0
―
―
CTN480G
TAE10M5-TB
TAE10U5-LD0□
TAE10U7-LD0□
TAE10U9-LD0□
(TAE10U6-LD0□)
(TAE10U8-LD0□)
(TAE10V0-LD0□)
お客様でご用意ください。
(6)
お客様でご用意ください。
(5)
センサなしを指定した場合、センサアンプは付属しません。
DC24V電源は別途お客様でご用意ください。
パラメータ設定の際に必要となります。
CTN480G以外のプログラムコントローラをご使用になる場合には、パルス・リミットコードをお客様でご用意ください。
電源接続用のコネクタがドライバに添付されています。
電源コードを直接接続してください。
モータコード、パルス・リミットコードの( )内及びレゾルバコードは耐屈曲性に優れたコードです。
モータコード、レゾルバコード及びパルス・リミットコードのリミットコード部の長さは、形式末尾の□にて最大3m
まで1m単位で指定します。
(3mの場合の例:EU9614N30、TAE10U5-LD03)
3m以上でご使用の場合はSにお問い合わせください。
SV-NETコードの長さは形式末尾の□にて最大3mまで1m単位で指定します。
(3mの場合の例:EU9610N2030)
3m以上でご使用の場合はSにお問い合わせください。
パルス・リミットコードのパルスコード部の長さは1.5mです。
191
電装システム
190
注(1)
(2)
(3)
(4)
(5)
(6)
備考1.
2.
!1
PORG
CCWL POWER
SVD-DW
ORG
CN1
POWER
マイクロ精密位置決めテーブルTM<マイクロテーブルシリーズ>
TM15
ACサーボモータ仕様
15(テーブル幅)
ACサーボモータ用ドライバはパラメータの初期設定が必要です。パラメータ設定には通信ユニット、
RS232Cコード、SV-NETコードが必要になりますので、別途ご注文ください。設定用ソフトウエアは多
摩川精機㈱のホームページからダウンロードしてください。
(URL:http://sv-net.tamagawa-seiki.com/download/download_menu.html)
ただし、これらは複数台のドライバで共用することが可能です。お客様の条件に合わせてご注文くだ
さい。
115.5
11
17
4-M2深さ4
11
●ドライバのパラメータ設定
CW
CCW
センサケーブル
コード長さL=500
(センサアンプへ)
63
69
46.5
15(テーブル幅)
15(テーブル長さ)
15(CWストローク)
□14.5
5(CCWストローク)
3.25
1
20
19
7
10
25
15
2.5
1
25
6-M2深さ2.5以下
62
質量:0.15kg
備考
樹脂製のテーブルカバーを使用していますが、ステンレス製のテーブルカバーの製作も可能です。ご要望の際はS
にお問い合わせください。
T M 《マイクロテーブルシリーズ》
26.8(原点位置)
15(テーブル幅)
TM15 ステッピングモータ仕様
115.5
4-M2深さ4
11
17
11
CW
CCW
センサケーブル
コード長さ=500
(センサアンプへ)
63
69
46.5
23.8(原点位置)
15(テーブル幅)
15(テーブル長さ)
2(CCWストローク)
1
0.5
19
□20
18(CWストローク)
20
7
25
15
2.5
1
25
6-M2深さ2.5以下
62
質量:0.18kg
備考
192
樹脂製のテーブルカバーを使用していますが、ステンレス製のテーブルカバーの製作も可能です。ご要望の際はS
にお問い合わせください。
193
電装システム
10
TS・CT の特長
TS
CT
精密位置決めテーブル
G 断面高さが低く、 コンパクト
直動案内機器にクロスローラウェイ又はミニアチュアリニアウェイを使用した最適設計で、二軸仕
様でも低い断面高さを実現。
H 高精度な位置決めが可能
《コンパクトシリーズ》
鋳鉄製のスライドテーブルとベッドを研削加工し、厳選された高精度な構成部品を組み込むことに
より、高い走行精度と高精度な位置決めを可能としました。
精密位置決めテーブルは、高剛性で振動減衰性に優れた鋳鉄製のスライドテーブルとベッドに、高性能
な直動案内機器を組み込み、送り機構に精密ボールねじを使用した位置決めテーブルです。
クロスローラウェイを使用したコンパ
クトな位置決めテーブルです。
ミニアチュアリニアウェイを採用し、モータを含む断面高さが
CT55/55T は、直動案内機器に
40mm の薄形精密位置決めテーブルです。
I スライドテーブルの面積を生かしたコンパクトな設計が可能
ストローク長さに対して、スライドテーブルの面積が大きく、テーブル上面で直接作業を行う使用
用途に適した形状です。
コンパクトで精度が高く高剛性な直動案内機器の特長を最大限に生かすことにより、断面高さが低く、信
頼性の高い、高精度な位置決めテーブルになっています。
精密位置決めテーブルには、単軸と二軸仕様の二種類があり、高精度な位置決めを要求される、精密測
定器、精密組立機などの分野で広く使用されています。
194
電装システム
TS75/75、TS125/125、TS125/220、
TS220/220、TS220/310、TS260/350、
CT75/75、CT125/125、CT220/220、
CT260/350、CT350/350 には、ラック
&ピニオン内蔵形クロスローラウェイを
使用しています。
T S・C T 《コンパクトシリーズ》
TS 及び CT は、精密な直動案内機器の分野で実績のある
195
呼び番号
呼び番号の配列例
●
4 モータの有無
●
CT 125 / 125
A
/
Y028
●
5 モータの種類
●
●
2 スライドテーブルの幅寸法
●
●
6 ボールねじのリード
●
●
3 スライドテーブルの長さ寸法
●
●
7 特別仕様
●
A
:モータ付き
お客様にてモータをご用意いただく場合には、モータなし(無記号)としてください。
●
5 モータの種類
●
ACサーボモータ
(1)をご指定の場合は361ページをご参照ください。
ステッピングモータをご指定の場合は367ページをご参照ください。
4 の項のモータの有無の指定をモータなし(無記号)とした場合、各モータに適用するモータアタッチメントとカップリン
●
グが取り付けられます。
注(1) TS55/55、TS75/75、CT55/55(T)
、CT75/75には適用しません。
T S・C T 《コンパクトシリーズ》
●
1 形式
●
5 SC
無記号:モータなし
1:リード1mm(55/55、75/75、125/125に適用します)
●
4 モータの有無
●
●
6 ボールねじのリード
●
2:リード2mm(55/55、75/75には適用しません)
5:リード5mm(55/55、75/75には適用しません)
TS:精密位置決めテーブル(単軸仕様)
●
1 形式
●
無記号:標準仕様
CT:精密位置決めテーブル(二軸仕様)
CT…T:精密位置決めテーブル(薄形コンパクト仕様)
●
7 特別仕様
●
●
2●
●
3 スライドテーブルの寸法
●
表1に示すスライドテーブルの寸法から選択します。
スライドテーブルの幅寸法と長さ寸法をmm単位で表示します。CT(二軸仕様)の場合は、Yテーブルの幅寸法と長さ寸法
表1 形式と直動案内機器及びスライドテーブルの寸法
CT
CT…T
:黒色クロム皮膜処理
SC
:センサ付きテーブル
BE
:オプションベース(55/55に適用します)
精度が標準仕様と異なるので注意が必要です。
黒色クロム皮膜処理
TS
:アルミニウム合金製テーブル(55/55、75/75には適用しません)
LR
アルミニウム合金製テーブル:スライドテーブルとベッド及びモータブラケットをアルミニウム合金鋳物にした仕様。
を表示します。
形式
AL
スライドテーブルとベッド及びモータブラケットの表面に処理を施します。
幅寸法/長さ寸法
mm
直動案内機器
クロスローラウェイ
55/55
ラック&ピニオン内蔵形
クロスローラウェイ
75/75、125/125、125/220、220/220、220/310、260/350
クロスローラウェイ
55/55
ラック&ピニオン内蔵形
クロスローラウェイ
75/75、125/125、220/220、260/350、350/350
ミニアチュアリニアウェイ
55/55
:表面に黒色の浸透性皮膜を形成することにより、耐食性を向上させます。
各部品の基準面については、表面処理が取り除かれます。
センサ付きテーブル
:リミット、原点前、原点センサが取り付けられます。ただし、ACサーボモータを選択した場
合は原点センサは付いていません。エンコーダのC相又はZ相信号を使用してください。
電装システム
196
197
諸特性
■精度
■テーブルイナーシャと起動トルク
表2 精度
単位
呼び番号
単軸仕様
繰返し
位置決め精度
位置決め精度
二軸仕様
CT 55/ 55T
−
CT 55/ 55
CT 75/ 75
CT125/125
−
CT220/220
−
CT260/350
CT350/350
テーブル運動
の平行度B
表5 テーブルイナーシャと起動トルク
XY運動の
直角度
(1)
0.005
0.010
0.005
(0.008)
0.008
(0.012)
±0.002
(±0.003)
0.015
(0.025)
0.005
(0.008)
0.015
(0.022)
0.008
(0.012)
0.020
(0.030)
0.005
単
軸
仕
様
TS 55/ 55
TS 75/ 75
TS125/125
TS125/220
TS220/220
TS220/310
TS260/350
CT 55/ 55T
0.008
CT 55/ 55
1
注
( ) 二軸仕様のテーブルに適用します。
備考 ( )内の値は、アルミニウム合金製テーブル(特別仕様AL)の精度で標準仕様のテーブルと異なるものを示します。
■最高速度
CT 75/ 75
二
軸
仕
様
CT125/125
CT220/220
表3 最高速度
モータの種類
ACサーボモータ
ステッピングモータ
CT260/350
最高速度 mm/s
モータ回転数
r/min
リード1mm
リード2mm
リード5mm
3000
1800
50
30
100
60
250
150
テーブルイナーシャ J T
×10−5kg・m2
呼び番号
CT350/350
X軸
Y軸
X軸
Y軸
X軸
Y軸
X軸
Y軸
X軸
Y軸
X軸
Y軸
X軸
Y軸
リード1mm
リード2mm
リード5mm
0.01
0.01
0.20
−
−
−
−
0.01
0.01
0.01
0.01
0.01
0.01
0.20
0.20
−
−
−
−
−
−
−
−
0.23
0.40
0.73
1.30
3.80
−
−
−
−
−
−
0.28
0.23
0.85
0.73
4.60
3.80
4.90
4.60
−
−
0.55
0.95
1.10
2.10
5.60
−
−
−
−
−
−
0.85
0.55
1.90
1.10
6.80
5.60
8.00
5.90
起動トルク T 0
N・m
0.03
0.03
0.07
0.07
0.07
0.07
0.07
0.02
T S・C T 《コンパクトシリーズ》
−
TS 55/ 55
−
TS 75/ 75
TS125/125
TS125/220
TS220/220
TS220/310
TS260/350
−
テーブル運動
の平行度A
mm
0.03
0.07
0.07
0.07
0.07
0.07
備考 標準モータを使用した時の値です。実際の最高速度は使用モータや負荷条件などに応じた運転
パターンの検討が必要です。
■耐荷重
表4 耐荷重
呼び番号
単軸仕様
二軸仕様
耐荷重
N
TS 55/ 55
TS 75/ 75
TS125/125
TS125/220
TS220/220
TS220/310
TS260/350
−
−
CT 55/ 55(T)
CT 75/ 75
CT125/125
−
CT220/220
−
−
CT260/350
CT350/350
20
50
250
280
300
400
500
350
500
備考 機能上、性能上支障なく使用することができる最大荷重です。
精度が保証できる荷重はこの値の約1/2になります。
電装システム
198
199
センサ仕様
CW
CWリミット
OFF
OFF
CCWリミット
原点前
表7 CT(二軸仕様)のセンサのタイミングチャート
原点
表6 TS(単軸仕様)のセンサのタイミングチャート
CCW
B
E
CCW
D
CCWリミット
B
OFF
原点前
OFF
OFF
OFF
E
原点
C
D
ON
原点
CWリミット
C
OFF
原点前
CCWリミット
OFF
D
単位
呼び番号
TS 55/ 55
TS 75/ 75
TS125/125
TS125/220
TS220/220
TS220/310
TS260/350
ボールねじの
リード
1
1
1
2
5
2
5
2
5
2
5
2
5
C
CW
B
T S・C T 《コンパクトシリーズ》
ON
Y軸
CW
ON
CCW
B
C
D
1
1
1
2
5
2
5
2
5
2
5
2
5
0.7
0.7
0.7
1.5
3
1.5
3
1.5
3
1.5
3
1.5
3
7.5
12.5
D
X軸
mm
単位
ボールねじの
リード
呼び番号
CT 55/ 55(T)
CT 75/ 75
1
1
1
2
5
2
5
2
5
2
5
25
CT125/125
60
CT220/220
60
CT260/350
90
CT350/350
125
備考1. センサの取付けは、呼び番号で指定します。
2. 各センサの仕様については、総合解説のセンサ仕様の項をご参照ください。
3. ACサーボモータを選択した場合、原点センサは付いていません。エンコーダのC相又はZ相信号を使用してください。
CWリミット
OFF
B
C
D
E
1
1
1
2
5
2
5
2
5
2
5
0.7
0.7
0.7
1.5
3
1.5
3
1.5
3
1.5
3
7.5
12.5
7.5
12.5
25
25
60
60
75
125
125
125
mm
備考1. センサの取付けは、呼び番号で指定します。
2. 各センサの仕様については、総合解説のセンサ仕様の項をご参照ください。
3. ACサーボモータを選択した場合、原点センサは付いていません。エンコーダのC相又はZ相信号を使用してください。
コネクタの種類
センサ用コネクタ
備考
200
センサ側コネクタの形式
相手側コネクタの形式
キャップ・ハウジング 172162-1
プラグ・ハウジング
接触子
接触子
170363-1
172170-1
170365-1
備考
タイコ エレクトロニクス
ジャパン合同会社
TSのセンサ用コネクタについては、総合解説のセンサ仕様の項をご参照ください。
201
電装システム
表8 CTのセンサ用コネクタの形式
精密位置決めテーブル<コンパクトシリーズ>
TS
テーブル寸法
呼び番号
Ey
Ly
LM(1)
Py
Lx
55
75
125
125
220
220
260
Ly
55
75
125
220
220
310
350
H
35.5
40
60
60
65
70
100
ストローク長さ
ブラケット長さ
15
25
50
120
120
180
250
M
取付ねじ
呼び番号
Ey
Hy
40
40
52
71
72
110
120
20
20
31.5
31.5
33.5
33.5
47.5
質量(1)
ベッド取付関係寸法
M
Px
Py
d
t
A
B1
B2
TS 55/ 55
6-M3深 4.5
30
17.5
4-M4深8
26
30
5
45
−
0.72
TS 75/ 75
6-M4深 5.5
40
30
4-M4用
24
62
7.5
60
−
1.6
TS125/125(2)
6-M5深10
70
50
4-M5用
35
100
15
95
TS125/220
(2 )
6-M5深10
70
75
4-M5用
35
100
20
180
TS220/220
6-M6深12
150
75
4-M6用
34
180
20
180
TS220/310
6-M6深12
150
100
4-M6用
35
180
50
210
TS260/350
6-M6深12
150
125
4-M8用
54
215
50
250
t
Hy
H
B1
B2
B1
A
注
(1) 電装システムのモータ仕様の項をご参照ください。
備考 図はセンサ付きのテーブルです。
h(3) (参考)
kg
5
( 5)
5
( 5)
5
( 5)
5
( 5)
10
(−)
7.3
11.0
15.7
26.5
T S・C T 《コンパクトシリーズ》
d
mm
軸心高さ
Px
Lx
Py
h
TS 55/ 55
TS 75/ 75
TS125/125(2)
TS125/220
(2 )
TS220/220
TS220/310
TS260/350
単位
テーブル寸法
47.5
1
注( ) モータの質量は含まれていません。
(2) モータブラケットは、テーブル上面より1.5mm高くなっています。
(3) ステッピングモータの時の寸法です。( )内はACサーボモータの時の寸法です。
●TAE9012-BE
8
5
40
45
80
4-φ4.5通しφ8 深ざぐり深 4.5
(TS55/55、CT55/55固定用)
電装システム
25
22.5
4-φ4.5
5
22.5
30
15
90
15
30
80
15
90
8-φ2.3通しφ4.1 深ざぐり深 5
TS55/55、CT55/55用オプションベース (CT55/55T固定用)
202
203
精密位置決めテーブル<コンパクトシリーズ>
CT
テーブル寸法
呼び番号
h LM
(1)
CT 55/ 55T
CT 55/ 55
(2 )
CT 75/ 75
CT125/125
(3 )
CT220/220
CT260/350
CT350/350
Ey
M
Lx
55
55
75
125
220
260
350
Ly
Py
Px
単位
テーブル寸法
Hx
B2
Ex
30
40
40
52
72
100
120
Ey
30
40
40
52
72
120
120
Hx
13
15.5
20
30.5
31.5
52.5
52.5
d
Hy
27
29.5
35
56.5
68.5
97.5
97.5
質量(1)
ベッド取付関係寸法
h(4) (参考)
kg
Px
Py
t
A
B1
B2
B3
6-M3深 4.0
30
17.5 8-M2深2.5
4
40
5.5
015
15
−
1.6
CT 55/ 55
(2 )
6-M3深 4.5
30
17.5 4-M4深4.5
4.5
30
5
−
45
−
1.7
CT 75/ 75
6-M4深 5.5
40
30
4-M4深5.5
9
40
7.5
−
60
−
2.0
CT125/125
(3 )
6-M5深10
70
50
4-M5用
14
80
15
−
CT220/220
6-M6深12
150
75
8-M6用
14
160
15
040
CT260/350
6-M6深12
150
125
8-M8用
29
270
15
055
B1
A
d
CT350/350
6-M6深12
250
125
8-M8用
29
270
15
100
t
Hy
H
B3
15
15
25
50
120
250
250
(1)
LM
h
B2
Y軸
15
15
25
50
120
150
250
CT 55/ 55T
Py
Ex
X軸
mm
軸心高さ
1
注( )
(2)
(3)
(4)
注
(1) 電装システムのモータ仕様の項をご参照ください。
備考 図はセンサ付きのテーブルです。
●TAE9012-BE
5
( 5)
5
110
( 5)
10
120
(−)
10
120
(−)
95
7.5
19.4
66.0
T S・C T 《コンパクトシリーズ》
M
Lx
H
40
45
55
85
100
150
150
ブラケット長さ
取付ねじ
呼び番号
B1
Ly
55
55
75
125
220
350
350
ストローク長さ
76.7
モータの質量は含まれていません。
X・Y軸のモータブラケットは、テーブル下面より3.5mm低く、上面より3.5mm高くなっています。
Y軸のモータブラケットはテーブル上面より1.5mm高くなっています。
ステッピングモータの時の寸法です。( )内はACサーボモータの時の寸法です。
8
5
40
45
80
4-φ4.5通しφ8 深ざぐり深 4.5
(TS55/55、CT55/55固定用)
電装システム
25
22.5
4-φ4.5
5
22.5
30
15
90
15
30
80
15
90
8-φ2.3通しφ4.1 深ざぐり深 5
TS55/55、CT55/55用オプションベース (CT55/55T固定用)
204
205
TSLB の特長
TSLB
精密位置決めテーブル LB
《高速ロングストロークシリーズ》
G 1500 mm/sの高速移動が可能
スチールコード入りの高張力タイミングベルトと高トルク 5 相ステッピングモータの組合せにより、
最高速度 1500 mm/s の高速移動が可能。
H 軽量でロングストローク
高強度アルミニウム合金製のスライドテーブルとベッドを使用して軽量化を実現。ストローク長さ
精密位置決めテーブル LB は、スライドテーブルの送り機構に耐久性に優れた高張力スチールコード入
りのタイミングベルトを採用し、駆動用モータに高トルク 5 相ステッピングモータを使用した、高速移動が
可能なロングストロークタイプの位置決めテーブルです。
スライドテーブルとベッドは高強度アルミニウム合金製で軽量化されています。また、直動案内機器には
は最大 1200 mmまでシリーズ化されています。
I 安定した高い走行性能
直動案内機器にリニアウェイを 2 本並列に組み込むことで、安定した高い走行性能を実現。
リニアウェイを 2 本並列に組み込むことで、安定した高い走行性能を実現しています。
精密位置決めテーブル LB は、高速で作業を行う組立機・搬送機・パレットチェンジャなどの位置決め機
構として最適です。
TSLB 《高速ロングストロークシリーズ》
ステッピングモータ
ブリッジカバー
スライドテーブル
ベッド
リニアウェイ
タイミングベルト
電装システム
精密位置決めテーブル LB の構造
206
207
呼び番号
諸特性
■精度
呼び番号の配列例
表2 精度
TSLB 120 - 700 A /
●
1 形式
●
V011
単位
大きさ
ストローク長さ
繰返し位置決め精度
TSLB 90
300
400
500
600
±0.070
●
4 モータの有無
●
●
2 大きさ
●
テーブル運動の平行度B
0.050
0.070
0.070
0.070
±0.100
±0.100
TSLB120
TSLB170
mm
●
5 モータの種類
●
■最高速度と分解能
●
3 ストローク長さ
●
●
1 形式
●
表3 最高速度と分解能
TSLB:精密位置決めテーブルLB
モータ回転数
r/min
最高速度
(1)
mm/s
分解能(2)
mm
TSLB 90
TSLB120
TSLB170
900
1500
0.1
表1に示す大きさから選択します。
TSLB 《高速ロングストロークシリーズ》
注(1) 標準モータを使用した時の値です。
実際の最高速度は使用モータや
注(1) 負荷条件などに応じた運転パターンの検討が必要です。
(2) モータ分割数が1000pulse/rev.のときの値です。
大きさはテーブル幅寸法を示しています。
●
2 大きさ
●
大きさ
■テーブルイナーシャと起動トルク
表4 テーブルイナーシャと起動トルク
●
3 ストローク長さ
●
表1に示すストローク長さから選択します。
表1 大きさとテーブル幅寸法及びストローク長さ
テーブル幅寸法
mm
大きさ
90
120
170
TSLB 90
TSLB120
TSLB170
●
4 モータの有無
●
ストローク長さ
mm
大きさ
テーブルイナーシャ J T
×10−5kg・m2
起動トルク T 0
N・m
TSLB 90
TSLB120
TSLB170
19
42
64
0.3
0.5
0.6
300、400、500、600
600、700、800、900、1000
800、1000、1200
無記号:モータなし
A
:モータ付き
お客様にてモータをご用意いただく場合には、モータなし(無記号)としてください。
●
5 モータの種類
●
ステッピングモータをご指定の場合は368ページをご参照ください。
208
電装システム
4 の項のモータの有無の指定をモータなし(無記号)とした場合、各モータに適用するカップリングが取り付けられます。
●
209
センサ仕様
精密位置決めテーブルLB<高速ロングストロークシリーズ>
TSLB90
表5 センサのタイミングチャート
L
A
A
60
100
4-M4深8
120
80
60
60
30
CCW
90
CW
80
ON
89
A
原点
35
C
D
OFF
原点前
OFF
CCWリミット
67.5
10
90
S/2
50
10
(100)
1
CWリミット
65
33
OFF
S/2
E
F
10-M4用穴
単位
大きさ
A
TSLB 90
TSLB120
TSLB170
120
120
160
C
50
50
50
D
20
20
20
備考 各センサの仕様については総合解説のセンサ仕様の項をご参照ください。
E
13
8
23
mm
単位
F
10
5
30
22.5
メカストッパ
呼び番号
TSLB90−300 A/V011
TSLB90−400 A/V011
TSLB90−500 A/V011
TSLB90−600 A/V011
全長
ベッド取付穴
S
L
300
400
500
600
570
670
770
870
A
160
210
260
310
ストローク長さ
mm
質量(1)(参考)
kg
6.8
7.5
8.3
9.1
TSLB 《高速ロングストロークシリーズ》
(80)
ストローク長さ
注(1) モータの質量は含まれていません。
電装システム
210
211
精密位置決めテーブルLB<高速ロングストロークシリーズ>
TSLB120
精密位置決めテーブルLB<高速ロングストロークシリーズ>
TSLB170
L
A
A
85
107.5
L
A
120
135
120
150
170
108
68
89
4-M5深10
A
120
140
85
108
120
45
10
85
168.5
37.5
150
4-M6深12
35
45
67.5
(90)
72
S/2
170
(140)
S/2
15
13
105
15
1.5
13
(100)
10-M5用穴
22.5
30
70
35
90
S/2
1
120
43.5
S/2
10-M6用穴
単位
呼び番号
TSLB120− 600 A/V011
TSLB120− 700 A/V011
TSLB120− 800 A/V011
TSLB120− 900 A/V011
TSLB120−1000 A/V011
ストローク長さ
全長
ベッド取付穴
S
L
600
700
800
900
1000
900
1000
1100
1200
1300
A
292.5
342.5
392.5
442.5
492.5
12.9
13.9
14.8
15.8
16.7
単位
mm
質量
(1 )
(参考)
kg
呼び番号
TSLB170− 800 A/V013
TSLB170−1000 A/V013
TSLB170−1200 A/V013
全長
ベッド取付穴
S
L
800
1000
1200
1200
1400
1600
A
390
490
590
ストローク長さ
mm
質量(1)(参考)
kg
27.0
30.5
33.9
TSLB 《高速ロングストロークシリーズ》
(80)
注(1) モータの質量は含まれていません。
注
(1) モータの質量は含まれていません。
電装システム
212
213
可動子コイル
コイル基板
リニアエンコーダ用ヘッド
ベッド
リニアエンコーダ用スケール
マグネットヨーク
固定子マグネット
LT リニアモータテーブル LT
可動テーブル
Cルーブ
リニアウェイ
原点マーク
リニアエンコーダ用ヘッド
214
215
電装システム
リニアエンコーダ用スケール
LT リニアモータテーブル LT
電装システム
217
216
LT リニアモータテーブル LT
電装システム
219
218
呼び番号
呼び番号の配列例
LT 100 CE G F - 430 / 5
●
1 形式
●
●
5 ストローク長さ
●
●
2 大きさ
●
●
6 分解能
●
●
3 推力・速度の仕様
●
●
7 冷却仕様
●
●
4 可動テーブルの形状
●
●
8 カバーの指定
●
D SC T2
●
9 センサの設定
●
●
10 可動テーブルの仕様
●
LT…CE :リニアモータテーブルLT コンパクトシリーズ
LT…LD :リニアモータテーブルLT ロングストロークシリーズ
LT…H :リニアモータテーブルLT ハイスラストシリーズ
●
2 大きさ
●
100:テーブルの幅寸法100mm
LT…CE
150:テーブルの幅寸法150mm
130:テーブルの幅寸法130mm LT…LD
170:テーブルの幅寸法170mm LT…H
●
3 推力・速度の仕様
●
適用:表1
LT リニアモータテーブル LT
●
1 形式
●
G:高推力(高速)仕様
V :高速仕様
無記号
表1 推力・速度記号の適用
形式
大きさ
無記号
○
−
−
150
○
−
−
130
○
−
−
170
○
○
−
130
−
−
○
170
−
−
○
LT…LD
LT…H
電装システム
V
100
LT…CE
220
推力・速度の仕様
G
221
諸特性
表3 LT…CE のテーブル性能
形式
項目
1
●
6 分解能
●
200、400、600、800、1000
230、430、630、830
400、600、800、1000、1200
350、550、750、950
240、720、1200、1680、2160、2640、2760
500、980、1460、1940、2420、2540
240、720、1200、1680
500、980、1460
680、1160、1640、2120、2600、2720
420、900、1380、1860、2340、2460
680、1160、1640
420、900、1380
680、1160、1640、2120、2600、2710
460、940、1420、1900、2380、2490
680、1160、1640
460、940、1420
650、1130、1610、2090、2570、2670
410、890、1370、1850、2330、2430
650、1130、1610
410、890、1370
1:0.1μm
5:0.5μm
10:1.0μm
●
7 冷却仕様
●
無記号:自冷
CA
:空冷(LT…Hに適用)
●
8 カバーの指定
●
無記号:カバーなし(標準の可動テーブルに適用)
D
:カバー付き(フランジ付きの可動テーブルに適用)
●
9 センサの指定
●
無記号:センサなし
SC
:センサ(リミット、原点前)
、
センサレール付き
(LT…CEに適用)
450
60
45
最大可搬質量
kg
分解能
μm
0.1
0.5
1.0
0.1
0.5
1.0
最高速度
(2 )
m/s
0.7
2.0
2.0
0.7
2.0
2.0
繰返し位置決め精度
(3)
μm
±0.5 ±0.5 ±1.0 ±0.5 ±0.5 ±1.0
注(1) 最大推力の持続時間は最大1秒です。
(2) 使用するコントローラの最大出力周波数によってはこの速度に達しない場合があります。
(3) リニアモータテーブルLTの温度が安定した時の値を示します。
600
200
LT150CEG
LT100CEG
100
0
500
1000
1500
400
200
0
2000
500
1000
1500
テーブルの移動速度
テーブルの移動速度 mm/s
2000
mm/s
図1 LT…CEの推力特性
100
15
10
LT100CEGF
LT100CEGS
1
0.1
1
100
LT100CEG
LT150CEG
45
LT リニアモータテーブル LT
LT100CEG
(S、F)
LT100CEG
(S、F)
…/T2
LT150CEG
(S、F)
LT150CEG
(S、F)
…/T2
LT130LDGS
LT130LDGS…/T2
LT130LDGF
LT130LDGF…/T2
LT170LD
(G、V)S
LT170LD(G、V)S…/T2
LT170LD
(G、V)F
LT170LD(G、V)F…/T2
LT130HS
LT130HS…/T2
LT130HF
LT130HF…/T2
LT170HS
LT170HS…/T2
LT170HF
LT170HF…/T2
150
15
15
N
ストローク長さ
mm
呼び番号
LT150CEG
N
表2 ストローク長さ
N
推力
表2に示すストローク長さから選択します。
N
定格推力
kg
●
5 ストローク長さ
●
最大推力
()
動的可搬質量
8 のカバーの指定の項で、Dを選択してください。
Fを選択した場合は、●
LT100CEG
kg
8 のカバーの指定の項で、無記号を選択してください。
Sを選択した場合は、●
推力
S:標準
F:フランジ付き
10
100
加速度 m/s2
動的可搬質量
●
4 可動テーブルの形状
●
1000
10
LT150CEGF
LT150CEGS
1
0.1
1
10
100
加速度 m/s2
1000
図2 LT…CEの動的可搬質量
備考 テーブルの移動速度1000mm/sのときの推力から算出した値です。
電装システム
9 では無記号としてください。
LT…LD、LT…Hはセンサを内蔵しています。●
●
10 可動テーブルの仕様
●
222
無記号:シングルテーブル
T2
:ツインテーブル
223
表4 LT…LD のテーブル性能
表5 LT…H のテーブル性能
形式
LT130LDG
項目
1
最大推力
()
N
定格推力
N
LT170LDG
450
60
45
150
15
15
形式
LT170LDV
項目
1
190
25
28
最大推力
()
定格推力
(2 )
N
自冷
N
空冷
(3)
N
最大可搬質量
kg
分解能
μm
0.1
0.5
1.0
0.1
0.5
1.0
0.1
0.5
1.0
最大可搬質量
kg
最高速度
(2)
m/s
0.7
2.0
3.0
0.7
2.0
2.0
0.7
2.0
3.0
分解能
μm
0.1
繰返し位置決め精度
(3)
μm
(5)
最高速度
(4 )
m/s
0.7
繰返し位置決め精度
(6 )
μm
±0.5
±0.5 ±0.5 ±1.0 ±0.5 ±0.5 ±1.0 ±0.5 ±0.5 ±1.0
注
(1) 最大推力の持続時間は最大1秒です。
(2) 使用するコントローラの最大出力周波数によってはこの速度に達しない場合があります。
(3) リニアモータテーブルLTの温度が安定した時の値を示します。
200
注(1)
(2)
(3)
(4)
(5)
(6)
推力
N
LT130LDG
LT130H
LT170H
300
060
075
030
900
120
150
090
0.5
1.0
0.1
1.5
(2.0) 1.5(2.0)
±0.5
0.5
±1.0
1.0
1.5
(2.0) 1.5(2.0)
0.7
±0.5
±0.5
±1.0
最大推力の持続時間は最大1秒です。
周囲温度が0〜25℃、鋼製架台に固定した場合です。詳細は下図(定格推力特性)をご参照ください。
空気流量30NL/minのときです。
1.5m/sを超える速度については、
にお問い合わせください。
使用するコントローラの最大出力周波数によってはこの速度に達しない場合があります。
リニアモータテーブルLTの温度が安定した時の値を示します。
100
1000
800
1000 1500 2000 2500 3000
テーブルの移動速度 mm/s
600
200
LT170LDG
LT170LDV
N
500
600
推力
0
400
LT170H
LT130H
N
200
推力
N
400
推力
200
500
1000
1500
500
1000
1500
2000
テーブルの移動速度 mm/s
0
2000
500
テーブルの移動速度
テーブルの移動速度 mm/s
図5 LT…Hの推力特性
1000 1500 2000 2500 3000
mm/s
図3 LT…LDの推力特性
100
150
100
130LDGS
1
170LDVS
170LDGS
加速度
110
75
60
LT130H/CA
68
LT130H
55
170LDGF
100
1000
0.1
1
m/s2
10
加速度
図4 LT…LDの動的可搬質量
100
m/s2
1000
1
10
100
1000
加速度 m/s2
25
電装システム
10
LT170H
170LDVF
0.1
1
N
LT130H
1
130
1
130LDGF
0.1
135
10
10
LT170H/CA
LT170H
定格推力
kg
15
10
動的可搬質量
動的可搬質量
kg
45
28
kg
LT170LD
LT130LD
動的可搬質量
100
40
環境温度 ℃
図6 LT…Hの動的可搬質量
図7 LT…Hの定格推力特性
備考 テーブルの移動速度1000mm/sのときの推力から算出した値です。
備考 テーブルの移動速度1000mm/sのときの推力から算出した値です。
224
LT リニアモータテーブル LT
0
0
100
225
センサ仕様
電装システム
表6 シングルテーブルのセンサタイミングチャート
■システム構成
表8 システム構成表
−
●シングルテーブルのシステム構成例
+
wコントロールユニット
w
NCD171G
ティーチングボックス
又はパソコン
シーケンサ
qリニアモータテーブル
e
LT…H
A
ON
B
原点
原点前
−方向リミット
OFF +方向リミット
メカストッパ
OFF
C
OFF
ストローク長さ+4
D
i
y
D
単位
大きさ
A
B(1)
C(1)
D(1)
LT100CE…/SC
LT150CE…/SC
LT130LD
LT170LD
LT130H
LT170H
34
44
45
44
82
92
3
3
3
3
3
3
05
05
05
05
17
17
16
16
10
09
20
20
1
注
( ) 各数値は目安であり、保証値ではありません。詳細な寸法が必要な際は、
備考 各センサの信号は、専用のコントロールユニットから出力されます。
r
mm
単相AC175〜253V
50/60Hz
t
●ツインテーブルのシステム構成例
w
wコントロールユニット
ティーチングボックス
又はパソコン
e
にお問い合わせください。
NCD171G
w
wコントロールユニット
NCD171G
シーケンサ
qリニアモータテーブル
q
LT…H/T2
o
表7 ツインテーブルのセンサタイミングチャート
i
−
+
−
+
y
単相AC175〜253V
50/60Hz
No.
A
A
ON
B
B
OFF
C
OFF
ON
原点
OFF
原点前
−方向リミット
+方向リミット
C
OFF
q
w
e
r
t
メカストッパ
D
D
1
1
単位
1
A
B( )
C( )
D( )
34
44
45
44
82
92
3
3
3
3
3
3
05
05
05
05
17
17
16
16
10
09
20
20
注
(1) 各数値は目安であり、保証値ではありません。詳細な寸法が必要な際は、
備考 各センサの信号は、専用のコントロールユニットから出力されます。
226
y
u
i
o
称
u
t
テーブル形式
LT…CE
リニアモータテーブル
コントロールユニット
ティーチングボックス
電源コード
モータ中継コード
TAE20S5-EC□□
エンコーダ中継コード(1)
リミット・エンコーダ中継コード
―
リミット分岐コード(0.1m)
通信ケーブル(2.0m)
軸間ケーブル(1.0m)
LT…CE/SC
LT…LD
234〜257ページをご覧ください
NCD171G-L2620
TAE1050-TB
お客様でご用意ください
TAE20C8-MC□□
―
TAE20D2-EC□□
TAE20D0-BC
TAE1098-RS
TAE1099-LC
LT…H
NCD171G-L6820
―
TAE20C9-EC□□
注(1) センサを装備しないLT…CEに適用します。構成例に示すリミットセンサ接続用のコードはありません。
備考 モータ中継コード、エンコーダ中継コード、リミット・エンコーダ中継コード長さは、形式末尾の□□にて3〜10mまで
1m単位で指定します。
(リミットコード部は、1.5m短くなります。
)
コード長さが10m未満の場合も2桁で指定します。
(3mの場合の例:TAE20C8-MC03)
にお問い合わせください。
227
電装システム
大きさ
LT100CE…/SCT2
LT150CE…/SCT2
LT130LD…/T2
LT170LD…/T2
LT130H …/T2
LT170H …/T2
mm
名
t
LT リニアモータテーブル LT
y
r
システム構成例
コントロールユニット
NCD171G
X2テーブル用
3
2
7
1
2
6
7
0
7
1
5
3
4
6
6
2
Yテーブル用
4
5
3
4
1
プログラムコントローラ
CTN480G
0
X1テーブル用
5
0
●二軸パラレル運転
並列に配置された2台のリニアモータテーブルLTを剛体結合し、ニ軸駆動によるパラレル運転を行う
ことができます。
従来の一軸駆動・一軸従動方式に比較し、この二軸パラレル運転は、筐体のねじれや左右駆動軸の遅
れが最小限の安定した位置決め機構を実現します。フラットパネルディスプレイ製造装置など、大きな
ワークの搬送や広い作業エリアが要求される検査装置に最適です。
二軸パラレル運転は個別対応となります。製品仕様などの詳細については、
にお問い合わせく
ださい。
駆動方式による特性比較
二軸パラレル運転
・ニ軸を駆動するので大きな推力が得られる。
・左右のテーブルの駆動により、テーブルの遅れや筐
体のねじれが最小限の位置決め機構を実現。
・テーブルの遅れや筐体のねじれが最小限のため、高
い位置決め精度が確保できる。
・ニ軸同期制御システムと比較し、コストを低く抑え
ることができる。
一軸駆動・一軸従動方式
・一軸の駆動のため、大きな推力を得ることができな
い。
・駆動は一軸のみのため、従動側テーブルの遅れや筐
体のねじれが生じやすい。
・従動側の遅れや筐体のねじれが生じるため、位置決
め精度が確保できない。
Yテーブル
X1テーブル
X2テーブル
LT リニアモータテーブル LT
この構成例は、
プログラムコントローラCTN480Gを上位指令装置とした、X1、X2テーブルのパ
ラレル運転のシステム構成です。
電装システム
228
229
■コントロールユニット
2
表10 I/Oコネクタ(CN5)の仕様
84(94)
●プログラムコントローラとサーボドライバをコンパクトに一体化
●接続コードが少なくてすみ、配線工数が大幅に削減
●本体を複数台使用する場合でもティーチングボックスは1台
2
( )内の数値は
NCD171G-L6820の寸法
を示します。
80(90)
10
(15)
60
6
(70)
49.4
2
9.5
10
(15)
160.4
60
●外部入出力用、センサ用のDC24V電源を内蔵
51
6
●I/Oシーケンス機能を内蔵しているため、簡単なシステムであれば
シーケンサ不要
●各種チェック機能により外部入出力の接続確認が容易
POWER
ORG
●プログラムは理解し易い命令語で構成され、プログラム作成が容易
UP DOWN SET
CN1
T.BOX
COM.
●フラッシュメモリによるメモリバックアップのため電池交換不要
7
1
6
2
5
3
4
ID
0
CN2
PLS/
LMTOUT
CN3
ENC/
LMTIN
CN4
216
235
250
RS-485
●移動中の推力監視、推力制限が可能
●ティーチングボックスを補助記憶装置として利用可能
TB 1
U
MOTOR
●多様な原点復帰方式により、センサを外付けしなくても原点復帰が
可能
E.
AC100V
/200V
L
N
CN5
PE
NCD171G-L2600
9.5
●RS232Cインターフェースによりパソコンとの接続が可能
●CEマーキング(低電圧指令、EMC指令)への適合を確認していま
す
表9 コントロールユニットの仕様
形式
項目
制
御
仕
様
機能
入力点数
入
出
力
仕
様
入
力
操作入力
入力方式
出力点数
出
力
操作出力
出力方式
入出力用電源
保護機能
その他の主な機能
一
般
仕
様
質量(参考)
LT100CE、LT150CE、LT130LD、LT170LD
LT130H、LT170H
インクリメンタルリニアエンコーダ
0.1μm、0.5μm、1.0μm
+方向/−方向パルス、位置指令パルス/方向指令、A/B相より選択 最大5MHz
±2147483647パルス(指令最大値)
±10V/定格速度(パラメータにより可変)分解能10V/372分割
MDI、ティーチング、RS232Cによるパソコン入力
アブソリュート指令 又は インクリメンタル指令
11Kバイト(1100ステップ以上)
512ポイント
ジャンプ、コール、繰返し、速度設定、加減速設定、タイマ制御、I/O制御、
入力条件分岐、各種編集機能(作成、消去、削除、挿入など)
LS入力:3点、I/O入力:20点
スタート、ストップ、非常停止、+/−方向移動手動運転、原点復帰、
アラームリセット、偏差カウンタリセット、サーボ制御、割込みなど(I/O入力にパラメータで割付け)
フォトカプラ双方向入力(無電圧接点、オープンコレクタ、オープンエミッタ対応)
I/O出力:12点
自動運転中、リミット作動、非常停止、原点復帰完了、準備完了、アラーム、
位置決め完了、原点前センサ(I/O出力にパラメータで割付け)
オープンエミッタ出力(最大開閉電圧:30V 最大負荷電流:100mA)
DC24V±5% 500mA
過電流、過電圧、過負荷、電圧低下、エンコーダ異常、偏差異常
回生抵抗過熱、CPU異常など
RS232C(読取り、書込み、ダイレクト実行など)
、ソフトウェアリミット、
推力制限、推力監視、移動中速度変更、LS論理変更、各種チェック機能
単相AC200〜230V±10%(1) 50/60Hz
0.6Arms
02.4Arms
4.7Arms
15.0Arms
0〜40℃ 保存時−10〜60℃
35〜85%RH(結露しないこと)
フラッシュメモリ(電池交換不要)
本体
:1.7kg
本体
:1.9kg
ティーチングボックス:0.5kg
ティーチングボックス:0.5kg
注
(1) NCD171G-L2620のAC100V仕様をご要望の際は、
230
NCD171G-L6820
1軸
IN01
IN02
IN03
IN04
IN05
IN06
IN07
IN08
IN09
IN10
IN11
IN12
IN13
IN14
IN15
IN16
IN17
IN18
IN19
IN20
INC
INC
MON1
MON2
GND
機能
汎用入力01
汎用入力02
汎用入力03
汎用入力04
汎用入力05
汎用入力06
汎用入力07
汎用入力08
汎用入力09
汎用入力10
汎用入力11
汎用入力12
汎用入力13
汎用入力14
汎用入力15
汎用入力16
汎用入力17
汎用入力18
汎用入力19
汎用入力20
汎用入力コモン
汎用入力コモン
モニタ出力1
モニタ出力2
モニタ出力コモン
ピン№
信号名
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
OUT01
OUT02
OUT03
OUT04
OUT05
OUT06
OUT07
OUT08
OUT09
OUT10
OUT11
OUT12
OUTC
OUTC
+24VI
+24VI
GNDI
GNDI
A+
A−
B+
B−
Z+
Z−
GND
機能
汎用出力01
汎用出力02
汎用出力03
汎用出力04
汎用出力05
汎用出力06
汎用出力07
汎用出力08
汎用出力09
汎用出力10
汎用出力11
汎用出力12
汎用出力コモン
汎用出力コモン
+24V出力電源
+24V出力電源
+24V出力電源コモン
+24V出力電源コモン
A相+出力
A相−出力
B相+出力
B相−出力
Z相+出力
Z相−出力
エンコーダ出力コモン
●CEマーキングについて
コントロールユニットのCEマーキングは、次の評価規格への適合の確認によるものです。
低電圧指令:EN50178
EMC指令:EN55011 Gr1 ClassA、EN61000-6-2
EMC指令の適合は当社が選定したシステム構成において確認しています。実際の機械・装置に組み込
んだ状態においては、配線や設置条件などが異なることが考えられますので、機械・装置でのEMC指令
への適合については、LTを組み込んだ最終機械・装置での測定が必要となります。
電装システム
主電源電圧
連続定格電流
瞬時最大電流
周囲温度
周囲湿度
停電対策
NCD171G-L2620
信号名
01
02
03
04
05
06
07
08
09
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
LT リニアモータテーブル LT
プ
ロ
グ
ラ
ム
仕
様
制御軸数
適用リニアモータ
フィードバック
分解能
指
外部
位置制御
令
プログラム
入
力
速度制御 アナログ
入力方法
指令入力方式
プログラム容量
位置決めポイント数
ピン№
にお問い合わせください。
231
推力と動的可搬質量
使用上の注意
■推力とは
可動子が移動方向に押す力のことをいいます。
推力は静止時に最大推力を発生し、速度の増加に伴って減少します。
加減速時に要する推力は223〜225ページ図1、図3及び図5の推力特性グラフをご参照ください。
■実効推力とは
V
速度
L
時間
FP
Fa
推力
運転パターンにおける所要推力の実効値です。
この値がリニアモータテーブルLTの定格推力を超える場合、
モータが過熱、焼付きをおこす恐れがあります。ご使用の際は
実効推力を計算し、定格推力以下での使用を原則としてくださ
い。ただし、使用環境等によって使用限界が変動することがあ
ります。
一般的に実効推力(Frms)は以下のように求められます。
(計算例は総合解説の運転パターンの検討の項をご参照くだ
さい)
FL
2
FP2×ta+(FP−2×FL)
×ta+FL2×tc
Frms= ――――――――――――――――
t
ここで、FPは加減速に要する力、FLは走行抵抗による力です。
走行抵抗にはリニアモータテーブルLTに組み込まれた直動案
内機器の摩擦、コード引回し抵抗等があります。
時間
ta
tc
ta
・リニアモータテーブルLTは精密機器ですので、過大な荷重や強い衝撃を与えないように、取扱いには
十分注意してください。
・リニアモータテーブルLTは高精度な加工及び組立調整を行っておりますので、分解や改造は絶対に行
わないでください。
・移動するケーブルにはモータコード等が接続されますので、本体の設置スペース以外にコードを取り
回すためのスペースの確保が必要となります。なお、コードの取り回しは走行抵抗の増加や無理な力
が加わることがないように余裕をもった曲率で行ってください。
・水、油、粉じんなどがかからない清浄な環境でご使用ください。
・取付面には、ゴミや有害な突起などが無いことを確認してください。
・リニアモータテーブルLTの取付面平面度は位置決め精度に影響しますので、30μm以下を推奨しま
す。
・リニアモータテーブルLTに組み込まれている直動案内機器には、グリースが塗布されていますので、
内部にゴミなどの混入のないように十分注意してください。
・リニアモータテーブルLTは内部に強力な磁石を有しています。磁性体を近づけると吸引される恐れが
ありますのでご注意ください。また、磁気の影響を受けやすい装置の近くでご使用になる場合に
は
にお問い合わせください。
・駆動させるためには、コントロールユニットのパラメータ設定が必要です。駆動モータに合わせたパ
ラメータ設定を確実に行ってください。
・リニアモータテーブルLTは、立軸には使用できません。
上記の事項以外にも、総合解説の使用上の注意の項をご参照ください。
1サイクル時間t
LT リニアモータテーブル LT
■動的可搬質量とは
必要加減速が得られる最大質量です。リニアモータテーブルLTは搭載する質量が大きくなるにつれて、
発揮できる加減速は低下しますので、ご使用の際は搭載質量と加減速の関係を考慮して、運転パターン
を検討してください。
諸特性の項の動的可搬質量のグラフは、リニアモータテーブルLTが速度1000mm/s時に発揮する推力
を基準にしたものです。例としてLT150CEGの場合、10kgの搭載質量時の加減速は、最大で約24m/s2と
いうことになります。
電装システム
232
233
リニアモータテーブルLT
シングルテーブル
ツインテーブル
LT100CEGS/T2
コード長さ:(200)
コード長さ:(200)
L
13 16
S(ストローク)
162
16
80
−
1316
+
162
3
16
n-M4用キリ穴
4-M4深7
コード長さ:(1200)
単位
ストローク長さ
全長
S
(1)
L
N
K
n
420
620
820
1020
1220
50
30
50
30
50
320
560
720
960
1120
10
16
20
26
30
200
400
600
800
1000
ベッド取付穴
注
( ) この他のストローク長さについては
にお問い合わせください。
備考 寸法図中の破線部は、センサ付き仕様/SCを示しています。
テーブル
総質量
kg
4.9
6.9
9.0
11.1
13.1
単位
mm
可動部質量
呼び番号
kg
0.58
LT100CEGS-230/T2
LT100CEGS-430/T2
LT100CEGS-630/T2
LT100CEGS-830/T2
ベッド取付穴
ストローク長さ
全長
S
(1)
L
N
K
n
230
430
630
830
620
820
1020
1220
30
50
30
50
560
720
960
1120
16
20
26
30
テーブル
総質量
kg
7.5
9.6
11.7
13.7
mm
可動部質量
kg
0.58
注(1) この他のストローク長さについては
にお問い合わせください。
備考 寸法図中の破線部は、センサ付き仕様/SCを示しています。
LT リニアモータテーブル LT
1
−
S+5
162
4-M4深7
コード長さ:(1200)
LT100CEGS- 200
LT100CEGS- 400
LT100CEGS- 600
LT100CEGS- 800
LT100CEGS-1000
+
8
n-M4用キリ穴
4-M4深7
呼び番号
92
4
8
92
80
(14)
92
+
4
80
−
30
24.5
K(取付穴:80ピッチ)
N
100
92
100
(14)
30
24.5
L
K(取付穴:80ピッチ)
N
92
LT100CEGS
リニアモータテーブルLT
電装システム
234
235
リニアモータテーブルLT
リニアモータテーブルLT
カバー付きシングルテーブル
カバー付きツインテーブル
LT100CEGF/DT2
コード長さ:(200)
コード長さ:(200)
L
92
+
105
−
105
115
(14)
92
+
92
−
+
8
4
4
105
−
K(取付穴:80ピッチ)
N
50
24.5
100
92
115
(14)
100
K(取付穴:80ピッチ)
N
50
24.5
L
92
LT100CEGF/D
8
n-M4用キリ穴
1316
S(ストローク)
162
n-M4用キリ穴
16
1316
4-M4深8
4-M4深8
ベッド取付穴
ストローク長さ
全長
S
(1)
L
N
K
n
420
620
820
1020
1220
50
30
50
30
50
320
560
720
960
1120
10
16
20
26
30
200
400
600
800
1000
注
( ) この他のストローク長さについては
にお問い合わせください。
備考 寸法図中の破線部は、センサ付き仕様/SCを示しています。
テーブル
総質量
kg
5.6
7.8
10.0
12.2
14.4
単位
mm
可動部質量
呼び番号
kg
0.93
LT100CEGF-230/DT2
LT100CEGF-430/DT2
LT100CEGF-630/DT2
LT100CEGF-830/DT2
ベッド取付穴
ストローク長さ
全長
S
(1)
L
N
K
n
230
430
630
830
620
820
1020
1220
30
50
30
50
560
720
960
1120
16
20
26
30
テーブル
総質量
kg
8.7
10.9
13.2
15.4
mm
可動部質量
kg
0.93
注(1) この他のストローク長さについては
にお問い合わせください。
備考 寸法図中の破線部は、センサ付き仕様/SCを示しています。
LT リニアモータテーブル LT
1
3
16
コード長さ:(1200)
単位
LT100CEGF- 200/D
LT100CEGF- 400/D
LT100CEGF- 600/D
LT100CEGF- 800/D
LT100CEGF-1000/D
162
4-M4深8
コード長さ:(1200)
呼び番号
S+5
162
電装システム
236
237
リニアモータテーブルLT
リニアモータテーブルLT
シングルテーブル
LT150CEGS
ツインテーブル
LT150CEGS/T2
コード長さ:(200)
コード長さ:(200)
L
+
4-M5深7
4-M4深7
4-M4深7
8
5
5
n-M5用キリ穴
S(ストローク)
242
−
140
+
100
80
−
140
92
n-M5用キリ穴
4-M5深7
4-M4深7
8
23 16
100
80
(14)
4-M5深7
140
92
40
23.5
150
+
140
100
80
150
−
K(取付穴:100ピッチ)
N
140
92
40
23.5
(14)
L
K(取付穴:100ピッチ)
N
23 16
16
S+5
242
242
16
3
コード長さ:(1200)
コード長さ:(1200)
単位
LT150CEGS- 400
LT150CEGS- 600
LT150CEGS- 800
LT150CEGS-1000
LT150CEGS-1200
1
全長
S
(1)
L
N
K
720
920
1120
1320
1520
60
60
60
60
60
600
800
1000
1200
1400
400
600
800
1000
1200
注
( ) この他のストローク長さについては
にお問い合わせください。
備考 寸法図中の破線部は、センサ付き仕様/SCを示しています。
(個)
テーブル
総質量
kg
14
18
22
26
30
12.4
15.5
18.6
21.6
24.7
n
単位
mm
可動部質量
呼び番号
kg
1.5
LT150CEGS-350/T2
LT150CEGS-550/T2
LT150CEGS-750/T2
LT150CEGS-950/T2
ベッド取付穴
ストローク長さ
全長
S
(1)
L
N
K
350
550
750
950
920
1120
1320
1520
60
60
60
60
800
1000
1200
1400
(個)
テーブル
総質量
kg
18
22
26
30
17.0
20.1
23.1
26.2
n
mm
可動部質量
kg
1.5
注(1) この他のストローク長さについては
にお問い合わせください。
備考 寸法図中の破線部は、センサ付き仕様/SCを示しています。
LT リニアモータテーブル LT
呼び番号
ベッド取付穴
ストローク長さ
電装システム
238
239
リニアモータテーブルLT
LT150CEGF/D
リニアモータテーブルLT
カバー付きシングルテーブル
LT150CEGF/DT2
コード長さ:(200)
カバー付きツインテーブル
コード長さ:(200)
L
L
155
+
4-M5深10
4-M4深8
4-M5深10
4-M4深8
n-M5用キリ穴
S(ストローク)
242
−
+
4-M5深10
4-M4深8
8
5
5
8
23 16
−
140
92
n-M5用キリ穴
140
140
92
65
155
23.5
168
(14)
150
+
140
−
155
168
(14)
150
140
92
65
23.5
K(取付穴:100ピッチ)
N
K(取付穴:100ピッチ)
N
23 16
16
S+5
242
242
16
3
コード長さ:(1200)
コード長さ:(1200)
単位
LT150CEGF- 400/D
LT150CEGF- 600/D
LT150CEGF- 800/D
LT150CEGF-1000/D
LT150CEGF-1200/D
1
全長
S
(1)
L
N
K
n
720
920
1120
1320
1520
60
60
60
60
60
600
800
1000
1200
1400
14
18
22
26
30
400
600
800
1000
1200
注
( ) この他のストローク長さについては
にお問い合わせください。
備考 寸法図中の破線部は、センサ付き仕様/SCを示しています。
テーブル
総質量
kg
14.8
18.1
21.5
24.8
28.2
単位
mm
可動部質量
呼び番号
kg
2.4
LT150CEGF-350/DT2
LT150CEGF-550/DT2
LT150CEGF-750/DT2
LT150CEGF-950/DT2
ベッド取付穴
ストローク長さ
全長
S
(1)
L
N
K
n
350
550
750
950
920
1120
1320
1520
60
60
60
60
800
1000
1200
1400
18
22
26
30
テーブル
総質量
kg
20.5
23.9
27.3
30.6
mm
可動部質量
kg
2.4
注(1) この他のストローク長さについては
にお問い合わせください。
備考 寸法図中の破線部は、センサ付き仕様/SCを示しています。
LT リニアモータテーブル LT
呼び番号
ベッド取付穴
ストローク長さ
電装システム
240
241
リニアモータテーブルLT
リニアモータテーブルLT
LT130LDGS シングルテーブル
LT130LDGS/T2 ツインテーブル
L
L
S(ストローク)
10
n-M4用キリ穴
1
ベッド取付穴
全長
S
(1)
L
N
K
n
520
1000
1480
1960
2440
2920
3040
80
80
80
80
80
80
80
360
840
1320
1800
2280
2760
2880
8
16
24
32
40
48
50
注
( ) この他のストローク長さについては
−
+
4-M5深9
3.5
ストローク長さ
240
720
1200
1680
2160
2640
2760
+
テーブル
総質量
kg
7.6
13.5
19.4
25.3
31.2
37.1
38.6
43
87.5
51
51
単位
mm
可動部質量
呼び番号
kg
1.7
87.5
LT130LDGS- 500/T2
LT130LDGS- 980/T2
LT130LDGS-1460/T2
LT130LDGS-1940/T2
LT130LDGS-2420/T2
LT130LDGS-2540/T2
ベッド取付穴
ストローク長さ
全長
S
(1)
L
N
K
n
1000
1480
1960
2440
2920
3040
80
80
80
80
80
80
840
1320
1800
2280
2760
2880
16
24
32
40
48
50
500
980
1460
1940
2420
2540
注(1) この他のストローク長さについては
テーブル
総質量
kg
15.2
21.1
27.0
32.9
38.8
40.3
mm
可動部質量
kg
1.7
にお問い合わせください。
にお問い合わせください。
LT リニアモータテーブル LT
LT130LDGS- 240
LT130LDGS- 720
LT130LDGS-1200
LT130LDGS-1680
LT130LDGS-2160
LT130LDGS-2640
LT130LDGS-2760
−
10
120
4-M5深9
51
単位
呼び番号
200
120
5
130
36
4-M5深9
87.5
43
120
+
36
100
130
−
5
120
10
3.5
50
10
n-M4用キリ
10
120
200
S+10
200
100
3010
30 10
100
50
K(取付穴:120ピッチ)
N
K(取付穴:120ピッチ)
N
電装システム
242
243
リニアモータテーブルLT
リニアモータテーブルLT
LT130LDGF/D カバー付きシングルテーブル
LT130LDGF/DT2 カバー付きツインテーブル
L
n-M4用キリ穴
L
K(取付穴:120ピッチ)
200
10
3010
65
120
10
K(取付穴:120ピッチ)
N
S(ストローク)
18.5
51
単位
LT130LDGF- 240/D
LT130LDGF- 720/D
LT130LDGF-1200/D
LT130LDGF-1680/D
全長
S
(1)
L
N
K
n
520
1000
1480
1960
80
80
80
80
360
840
1320
1800
8
16
24
32
240
720
1200
1680
注
(1) この他のストローク長さについては
テーブル
総質量
kg
8.3
14.6
20.9
27.2
120
−
+
36
5
130
+
4-M5深10
43
87.5
4-M5深10
51
87.5
51
単位
mm
可動部質量
呼び番号
kg
2.0
−
10
200
LT130LDGF- 500/DT2
LT130LDGF- 980/DT2
LT130LDGF-1460/DT2
ベッド取付穴
ストローク長さ
全長
S
(1)
L
N
K
n
1000
1480
1960
80
80
80
840
1320
1800
16
24
32
500
980
1460
注(1) この他のストローク長さについては
テーブル
総質量
kg
16.6
22.8
29.1
mm
可動部質量
kg
2.0
にお問い合わせください。
にお問い合わせください。
LT リニアモータテーブル LT
呼び番号
ベッド取付穴
ストローク長さ
145
43.5
36
87.5
130
120
n-M4用キリ穴
4-M5深10
43
5
130
145
130
43.5
18.5
+
10
120
10
−
S+10
200
120
3010
65
130
N
電装システム
244
245
リニアモータテーブルLT
リニアモータテーブルLT
LT170LDGS シングルテーブル・高推力仕様
LT170LDVS シングルテーブル・高速仕様
LT170LDGS/T2 ツインテーブル・高推力仕様
LT170LDVS/T2 ツインテーブル・高速仕様
L
L
K(取付穴:160ピッチ)
N
K(取付穴:160ピッチ)
N
30 9
S(ストローク)
242
115.5
呼び番号
1
L
ベッド取付穴
N
K
n
テーブル
総質量
kg
680
1000
100
800
12
22.6
1160
1480
100
1280
18
32.7
1640
1960
100
1760
24
42.7
2120
2440
100
2240
30
52.8
2600
2920
100
2720
36
62.9
2720
3040
80
2880
38
65.4
にお問い合わせください。
43
115.5
51
115.5
5
4-M6深9
n-M5用キリ穴
51
単位
mm
可動部質量
呼び番号
kg
2.5
注
( ) この他のストローク長さについては
+
LT170LDGS- 420/T2
LT170LDVS - 420/T2
LT170LDGS- 900/T2
LT170LDVS - 900/T2
LT170LDGS-1380/T2
LT170LDVS -1380/T2
LT170LDGS-1860/T2
LT170LDVS -1860/T2
LT170LDGS-2340/T2
LT170LDVS -2340/T2
LT170LDGS-2460/T2
LT170LDVS -2460/T2
1
ベッド取付穴
ストローク長さ
全長
S
(1)
L
N
K
n
420
1000
100
800
12
25.1
900
1480
100
1280
18
35.2
1380
1960
100
1760
24
45.2
1860
2440
100
2240
30
55.3
2340
2920
100
2720
36
65.4
2460
3040
80
2880
38
67.9
テーブル
総質量
kg
mm
可動部質量
kg
LT リニアモータテーブル LT
LT170LDGS- 680
LT170LDVS - 680
LT170LDGS-1160
LT170LDVS -1160
LT170LDGS-1640
LT170LDVS -1640
LT170LDGS-2120
LT170LDVS -2120
LT170LDGS-2600
LT170LDVS -2600
LT170LDGS-2720
LT170LDVS -2720
S
(1)
−
4-M6深9
8.5
単位
全長
+
36
n-M5用キリ穴
51
ストローク長さ
−
160
170
160
+
5
170
−
4-M6深9
43
160
13
36
8.5
9
242
160
55
160
125
13
S(ストローク)+8 10
9
125
30 9
125
55
242
2.5
注( ) この他のストローク長さについては
にお問い合わせください。
電装システム
246
247
リニアモータテーブルLT
リニアモータテーブルLT
LT170LDGF/D カバー付きシングルテーブル・高推力仕様
LT170LDVF/D カバー付きシングルテーブル・高速仕様
LT170LDGF/DT2 カバー付きツインテーブル・高推力仕様
LT170LDVF/DT2 カバー付きツインテーブル・高速仕様
L
L
K(取付穴:160ピッチ)
N
K(取付穴:160ピッチ)
115.5
51
LT170LDGF- 680/D
LT170LDVF - 680/D
LT170LDGF-1160/D
LT170LDVF -1160/D
LT170LDGF-1640/D
LT170LDVF -1640/D
1
S
(1)
L
ベッド取付穴
N
K
n
テーブル
総質量
kg
680
1000
100
800
12
24.0
1160
1480
100
1280
18
34.6
1640
1960
100
1760
24
45.2
注
( ) この他のストローク長さについては
にお問い合わせください。
43
160
+
−
+
4-M6深12
115.5
4-M6深12
51
115.5
n-M5用キリ穴
51
単位
mm
可動部質量
呼び番号
kg
2.8
9
LT170LDGF- 420/DT2
LT170LDVF - 420/DT2
LT170LDGF- 900/DT2
LT170LDVF - 900/DT2
LT170LDGF-1380/DT2
LT170LDVF -1380/DT2
1
ベッド取付穴
ストローク長さ
全長
S
(1)
L
N
K
n
420
1000
100
800
12
26.9
900
1480
100
1280
18
37.5
1380
1960
100
1760
24
48.0
注( ) この他のストローク長さについては
テーブル
総質量
kg
mm
可動部質量
kg
2.8
にお問い合わせください。
LT リニアモータテーブル LT
呼び番号
全長
242
5
23.5
単位
ストローク長さ
−
170
170
43.5
4-M6深12 n-M5用キリ穴
43
185
160
5
+
10
160
13
36
170
185
170
43.5
−
S+8
160
70
9
160
13
23.5
S(ストローク)
242
242
36
30 9
70
30 9
170
N
電装システム
248
249
リニアモータテーブルLT
シングルテーブル
LT130HS/T2
ツインテーブル
L
L
S
200
62
単位
LT130HS- 680
LT130HS-1160
LT130HS-1640
LT130HS-2120
LT130HS-2600
LT130HS-2710
全長
S
(1)
L
N
K
n
1010
1490
1970
2450
2930
3040
85
85
85
85
85
80
840
1320
1800
2280
2760
2880
16
24
32
40
48
50
680
1160
1640
2120
2600
2710
注
(1) この他のストローク長さについては
にお問い合わせください。
テーブル
総質量
kg
15.6
21.7
27.8
33.9
40.0
41.4
120
20
120
5
50
4-M5深10
4-M5深10
62
62
76
76
単位
mm
可動部質量
呼び番号
kg
2.5
n-M4用穴
200
LT130HS- 460/T2
LT130HS- 940/T2
LT130HS-1420/T2
LT130HS-1900/T2
LT130HS-2380/T2
LT130HS-2490/T2
ベッド取付穴
ストローク長さ
全長
S
(1)
L
N
K
n
1010
1490
1970
2450
2930
3040
85
85
85
85
85
80
840
1320
1800
2280
2760
2880
16
24
32
40
48
50
460
940
1420
1900
2380
2490
注(1) この他のストローク長さについては
テーブル
総質量
kg
18.1
24.2
30.3
36.4
42.5
43.9
mm
可動部質量
kg
2.5
にお問い合わせください。
LT リニアモータテーブル LT
呼び番号
ベッド取付穴
ストローク長さ
S+10
100
130
(49)
3
76
10
100
120
4-M5深10 n-M4用穴
(150)
50
5
100
130
(49)
3
200
10
120
10
45 20
55
20
(150)
45 20
K(取付穴:120ピッチ)
N
K(取付穴:120ピッチ)
N
55
120
LT130HS
リニアモータテーブルLT
電装システム
250
251
リニアモータテーブルLT
リニアモータテーブルLT
LT130HF/D カバー付きシングルテーブル
LT130HF/DT2 カバー付きツインテーブル
L
L
K(取付穴:120ピッチ)
K(取付穴:120ピッチ)
N
S
200
ベッド取付穴
ストローク長さ
全長
S
(1)
L
N
K
n
1010
1490
1970
85
85
85
840
1320
1800
16
24
32
680
1160
1640
注
(1) この他のストローク長さについては
にお問い合わせください。
テーブル
総質量
kg
15.9
22.0
28.1
5
4-M5深10
62
4-M5深10
76
62
76
単位
mm
可動部質量
呼び番号
kg
2.9
120
130
145
(49)
(56)
76
20
LT130HF- 460/DT2
LT130HF- 940/DT2
LT130HF-1420/DT2
ベッド取付穴
ストローク長さ
全長
S
(1)
L
N
K
n
1010
1490
1970
85
85
85
840
1320
1800
16
24
32
460
940
1420
注(1) この他のストローク長さについては
テーブル
総質量
kg
18.8
24.9
31.0
mm
可動部質量
kg
2.9
にお問い合わせください。
LT リニアモータテーブル LT
LT130HF- 680/D
LT130HF-1160/D
LT130HF-1640/D
50
(150)
62
3
単位
呼び番号
130
120
5
130
145
(49)
50
(150)
130
(56)
3
n-M4用穴
200
120
10
4-M5深10
S+10
10
200
45 20
70
120
10
n-M4用穴
20
130
45 20
70
120
N
電装システム
252
253
リニアモータテーブルLT
リニアモータテーブルLT
シングルテーブル
LT170HS
LT170HS/T2
ツインテーブル
L
L
K(取付穴:160ピッチ)
N
S
220
20
70
13
70
n-M5用穴
6-M6深12
72
ベッド取付穴
ストローク長さ
全長
S
(1)
L
N
K
n
1020
1500
1980
2460
2940
3040
110
110
110
110
110
80
800
1280
1760
2240
2720
2880
12
18
24
30
36
38
650
1130
1610
2090
2570
2670
注
(1) この他のストローク長さについては
50
70
135
70
5
6-M6深12
6-M6深12
72
76
72
76
にお問い合わせください。
テーブル
総質量
kg
25.1
34.9
44.6
54.4
64.1
66.4
単位
mm
可動部質量
呼び番号
kg
4.0
LT170HS- 410/T2
LT170HS- 890/T2
LT170HS-1370/T2
LT170HS-1850/T2
LT170HS-2330/T2
LT170HS-2430/T2
ベッド取付穴
ストローク長さ
全長
S
(1)
L
N
K
n
1020
1500
1980
2460
2940
3040
110
110
110
110
110
80
800
1280
1760
2240
2720
2880
12
18
24
30
36
38
410
890
1370
1850
2330
2430
注(1) この他のストローク長さについては
テーブル
総質量
kg
29.1
38.9
48.6
58.4
68.1
70.4
mm
可動部質量
kg
4.0
にお問い合わせください。
LT リニアモータテーブル LT
LT170HS- 650
LT170HS-1130
LT170HS-1610
LT170HS-2090
LT170HS-2570
LT170HS-2670
20
76
単位
呼び番号
70
135
9.5
(150)
(150)
5
(49)
170
160
135
170
(49)
50
220
70
13
9.5
10 S+10
220
55 20
63
160
20
n-M5用穴
K(取付穴:160ピッチ)
N
55
63
電装システム
254
255
リニアモータテーブルLT
リニアモータテーブルLT
LT170HF/D カバー付きシングルテーブル
LT170HF/DT2 カバー付きツインテーブル
L
20
S
220
70
13
70
220
55 20
78
70
9.5
50
ベッド取付穴
全長
S
(1)
L
N
K
n
1020
1500
1980
110
110
110
800
1280
1760
12
18
24
注
(1) この他のストローク長さについては
70
70
20
70
5
170
170
185
(150)
(49)
220
6-M6深12
72
76
6-M6深12
72
76
76
ストローク長さ
650
1130
1610
50
10 S+10
にお問い合わせください。
テーブル
総質量
kg
25.5
35.2
45.0
単位
mm
可動部質量
呼び番号
kg
4.4
LT170HF- 410/DT2
LT170HF- 890/DT2
LT170HF-1370/DT2
ベッド取付穴
ストローク長さ
全長
S
(1)
L
N
K
n
1020
1500
1980
110
110
110
800
1280
1760
12
18
24
410
890
1370
注(1) この他のストローク長さについては
テーブル
総質量
kg
29.9
39.6
49.4
mm
可動部質量
kg
4.4
にお問い合わせください。
LT リニアモータテーブル LT
LT170HF- 650/D
LT170HF-1130/D
LT170HF-1610/D
(56)
5
72
9.5
n-M5用穴
単位
呼び番号
170
160
170
(150)
(49)
(56)
185
170
13
6-M6深12
n-M5用穴
K(取付穴:160ピッチ)
N
20
160
55
78
L
K(取付穴:160ピッチ)
N
電装システム
256
257
LT…Mの特長
LT…M
リニアモータテーブルLT…M
1
マグネットによる吸引力が発生しない C 形マグネットヨークを採用、小形サイズの直動案内機器を
組み込むことで、テーブル高さ 17mm、幅 45mm のコンパクトサイズを実現。 さらに、ムービン
グコイル方式の採用により、ストローク長さ最大 300mm までをシリーズ化しました。
2
テーブルの案内部には、S
S C ルーブリニアウェイ L を採用し、長期メンテナンスフリーを実現。 さ
3
高分解能・高精度
光学式リニアエンコーダを採用したフルクローズドループ制御により、高分解能・高精度な位置決
めを実現。 長期間にわたり安定した精度を維持します。
らにリニアモータとの組合せにより、高速・高応答な位置決めが可能です。
リニアモータテーブル LT…M は、半導体・液晶関連製造装置やクリーンな環境が要求される検査装置・
電子部品組立装置などのコンパクトな位置決め機構として最適です。
高速、 高応答な位置決めを実現
軽量な可動テーブルと高推力を発揮するコア付きリニアモータの組合せにより、最高 1.3m/s (分
解能 0.5μm 選択時) の高速・高応答な位置決めを実現します。
リニアモータテーブル LT…M は、鋼製の可動テーブルとベッドの間に AC リニアサーボモータを組み込
み、光学式リニアエンコーダを内蔵したコンパクトな位置決めテーブルです。
コンパクト・ロングストローク仕様
4
メンテナスフリー
テーブルの案内部には、長期メンテナンスフリーを実現する、 C ルーブリニアウェイ L を使用。
LT…M リニアモータテーブル LT…M
電装システム
リニアモータテーブル LT…M の構造
258
259
動作原理・二軸パラレル運転
■動作原理
リニアモータテーブルLT…Mは、界磁コイルをもつ可動子と、ヨークの内側に対向して配置されたマ
グネットをもつ固定子で構成されています。マグネットにより常に垂直方向に働く磁束と、電流によっ
てコイルまわりに発生する回転磁束とにより、コイルは水平方向に力を受けます。
(フレミングの左手の
法則)
磁束の向きに応じた方向にコイル電流を切り替えることで、一方向の連続した推力が得られ、可動子
は直線運動を持続します。
呼び番号・諸特性
呼び番号の配列例
LT 45 M - 120 / 1
●
1 形式
●
●
4 リニアエンコーダ分解能
●
●
2 大きさ
●
●
3 ストローク長さ
●
●
1 形式
●
LT…M:リニアモータテーブルLT…M
●
2 大きさ
●
■二軸パラレル運転
45:ベッド幅寸法45mm
●
3 ストローク長さ
●
120:120mm
180:180mm
240:240mm
300:300mm
●
4 リニアエンコーダ分解能
●
1:0.1μm
5:0.5μm
表1 仕様・性能
10
形式
最大推力
(1 )
N
20
定格推力
(2 )
N
04
最大可搬質量
kg
分解能
μm
0.10
0.5
最高速度
m/s
0.27
1.3
3
繰返し位置決め精度
( ) μm
01
動的可搬質量
kg
LT45M
項目
1
0.1
±0.5
注(1) 最大推力の持続時間は最大1秒です。
(2) 周囲温度20℃、金属製の相手部材に取り付けた場合です。
(3) リニアモータテーブルLT…Mの温度が安定した時の値を
示します。
0.01
1
10
100
1000
加速度 m/s2
260
電装システム
図1 動的可搬質量
LT…M リニアモータテーブル LT…M
1台の専用ドライバに2台のリニアモータテーブルLT…Mを接続し、並列配置することで、二軸パラレ
ル運転が可能です。
二軸駆動により、大きな推力が得られ、筐体のねじれや左右駆動軸の遅れを最小限に抑え、安定した
位置決め機構が構築できます。
261
電装システム
■使用例
■システム構成
リニアモータテーブルLT…Mには専用のドライバが用意されており、システム構成を表2に示します。
ドライバの仕様については、264ページの専用ドライバの項を参照してください。ご注文の際は、表2に
示す形式にて別途ご指定ください。
専用ドライバのプログラム機能を使用することにより、上位装置を必要としないシンプルなシステム
構成で、リニアモータテーブルLT…Mを制御することが可能になります。以下に、システム構成例とプ
ログラムサンプルを示します。
●運転パターン
●システム構成例
表2 システム構成
速度
No.
名称
P(00)
形式
P(01)
P(02)
時間
6 セットアップソフトウェア
2ドライバ
w ドライバ
5
パソコン
上位装置
・PLC、スイッチ、センサなど
7
8
リニアモータ
q
テーブルLT…M
1 リニアモータテーブルLT…M
e
r
t
4
3
AC100V
(50/60Hz)
y
LT45M
検査中
i 電源コード
搬入中
PC
プログラム作成
速度N(00)移動
ADAX3-R5ML2-N 60
速度N(01)移動
モータ中継コード
TAE20T0-AM
(3.5m(1)
)
エンコーダ中継コード
TAE20R4-EC
(2m
(1)
)
ADCH-AT2
パソコン接続ケーブル
(パソコン側Dsub9ピン)
(2m)
セットアップ
AHF-P02
ソフトウェア
u I/Oコネクタ(2)
搬出中
P(02)
セットアップ
ソフトウェア
AHF
TAE20R5-CN
お客様でご用意ください。
プログラムアップロード
(注)サーボONとアラームリセットは、
I/Oコネクタからの入力が必要となります。
プログラム運転では行えません。
検査完了信号(X01)
サーボON
アラームリセット
原点復帰(X09)
スタート信号(X00)
サーボ準備完了(Y00)
P
(01)
アラーム(Y01)
P(00)
P
(02)
位置決め完了信号(Y02)
リニアモータテーブルLT45M
注
(1) 特殊なコード長さについては
までお問い合わせください。
(2) 住友スリーエム㈱製 10150-3000PE(プラグ)
/10350-52F0-008(ハウジング)
●セットアップソフトウェア操作画面例とプログラムサンプル
リニアモータテーブルLT…Mを動作させるためには、ドライバパラメータの初期設定が必要です。ド
ライバのパラメータ設定は、セットアップソフトウェアにて行います。
ドライバ本体には、セットアップソフトウェア、パソコン接続ケーブルが添付されておりません。こ
れらは複数台のドライバで共用することが可能ですが、最低1組は必要となります。お客様の条件に合
わせて別途ご注文ください。
LT…M リニアモータテーブル LT…M
●ドライバのパラメータ設定
ポジションデータ画面
移動速度&加速・減速データ画面
プログラム編集画面
● I/Oコネクタ
サーボONやアラームリセットの信号入力は、I/O端子からの入力が必要となります。
I/O端子への接続ケーブルは、ご使用条件に合わせてお客様でご用意ください。I/Oコネクタは別途用
意していますので、ご注文ください。
電装システム
262
←検査完了入力X(01)のON待ち
←位置決め完了信号OFF
←速度N(00)でP(00)へ移動
←移動完了後、位置決め完了信号ON
←検査完了入力X(01)のON待ち
←位置決め完了信号OFF
←速度N(00)でP(01)へ移動
←移動完了後、位置決め完了信号ON
←検査完了入力X(01)のON待ち
←位置決め完了信号OFF
←速度N(01)でP(02)へ移動
←移動完了後、位置決め完了信号ON
←LOOPへ
263
■専用ドライバ
表4 ドライバのプログラム機能の仕様
● 簡易PLC機能により、最大512ステップまでのプログ
φ6
(75)
57
52
項 目
130
(4)
ACSERVO
AD
HITACHI
ADAX3-R5ML2
(16)
160
150
series
表3 ドライバの仕様
形式
基
本
仕
様
内
部
機
能
1
264
ADAX3-R5ML2-N 60
最大定格電流(Arms)
最大瞬時電流
(Arms)
電源設備容量
(kVA)
入力電源(主回路)
入力電源(制御回路)
保護構造(1)
制御方式
制御モード
0.9
2.7
0.3
単相100〜115V+10/−15%
50/60Hz±5%
開放型IP00
線間正弦波変調PWM方式
位置制御/速度制御/推力制御
A、B、Z式のインクリメンタルリニアエンコーダ(ラインドライバ:AM26LS31相当)
フィードバック
電源電圧5V±10%、消費電力:max280mA、最高周波数4MHz(4逓倍後)
速度指令/制限入力
アナログ入力:0〜±10V/最高速度(ゲイン設定可)
推力指令/制限入力
アナログ入力:0〜±10V/最大推力(ゲイン設定可)
ラインドライバ信号(2Mpps以下)
①正転パルス+逆転パルス ②符号入力+指令パルス
位置指令
③90°
位相差二相パルス指令(最大周波数500kpps) ①〜③よりいずれか選択
DC12/24V接点信号入力(シンク/ソース対応可)(DC24V電源内蔵)
①サーボON ②アラームリセット ③制御モード切替 ④推力制限 ⑤正転駆動禁止 ⑥逆転駆動禁止
接点入力信号
⑦多段速度1/電子ギア切替 ⑧多段速度2 ⑨速度比例制御/ゲイン切替
⑩速度ゼロクランプ/外部トリップ(Temp.信号)
(2) ⑪原点リミットスイッチ ⑫原点復帰
⑬パルス列入力信号許可/正転信号 ⑭偏差カウンタクリア/逆転信号
オープンコレクタ信号出力(シンク出力)
接点出力信号
①サーボ準備完了 ②アラーム ③位置決め完了 ④速度到達/アラームコード1 ⑤ゼロ速度検出
⑥ブレーキ解除 ⑦推力制限中/アラームコード2 ⑧過負荷予告/アラームコード3
エンコーダ
A、B相信号出力:ラインドライバ信号出力、Z相信号出力:ラインドライバ及びオープンコレクタ信号出力
モニタ出力
2ch、0〜±3V電圧出力 速度検出値、推力指令など選択的に出力
内蔵オペレータ
5桁数字表示器、キー入力×5
外部オペレータ
Windows95/98/Me、WindowsNT/2000/XP パソコン接続可能(RS-232Cポート使用)
回生制動回路
内蔵(ただし制動抵抗なし)
ダイナミックブレーキ
(3)
内蔵(動作条件設定可能)
過電流、過負荷、制動抵抗器過負荷、主回路過電圧、メモリ異常、CPU異常、主回路不足電圧、
CT異常、サーボON時地絡、制御回路不足電圧、外部トリップ入力(モータ温度異常)
、
保護機能
パワーモジュール異常、エンコーダ異常、位置偏差異常、位置監視時間異常、速度偏差異常、
過速度異常、駆動範囲異常、駆動禁止異常、サーボアンプ温度異常、アンマッチエラー、
不当命令エラー、ネスト回数エラー、実行エラー、磁極位置推定異常、磁極位置推定未実行
周囲温度/保存温度
(4)
0〜55℃/−10〜70℃
周囲湿度
20〜90%RH (結露しないこと)
5
2
10〜55Hz
耐振動
()
5.9m/s(0.6G)
使用場所
標高1000m以下、屋内(腐食ガス、塵埃のないところ)
概略質量(kg)
0.8
注
( ) 保護方式はJEM1030に準拠します。
(2) 温度センサ信号を外部トリップ入力に接続した場合です。
実行形式
3
( ) ダイナミックブレーキは非常停止用としてお使いく
ださい。
(4) 保存温度は輸送中の温度です。
(5) JISC0040の試験法に準拠します。
入
出
力
機
能
外部デジタル
接点入力
外部出力
外部アナログ入力
予
約
語
変数点数
命令
演算子
●セットアップソフトウェア
●ドライバパラメータの設定・参照・変更・印刷・保存
を行います。
●リアルタイムに運転状態及び出力状態のモニタを行う
ことができます。
●速度、電流などをグラフ表示します。
●試運転やゲインチューニングを補助します。
●プログラムの編集、コンパイル、ダウンロード、アッ
プロードを行います。
表5 セットアップソフトウェア動作環境
項 目
条 件
図2 モニタ機能
DOS/Vパソコン
パソコン
メモリ:32Mバイト以上
ハードディスク空き容量:30Mバイト以上
ディスプレイ解像度:800×600以上推奨
OS
電装システム
使
用
環
境
プログラミング
支援機能
BASICライク
512ステップまで、または6kバイト以内
テキスト入力、表示
プログラムの文法チェック
プログラムロード、全クリア
シングルステップ
ブレークポイント
インタープリタ方式1.12ms/命令
サブルーチンコール可能:最大8ネスト
接点信号/オープンコレクタ信号入力(内部DC24V電源供給あり)
サーボON、アラームリセット、汎用入力接点12点X(00)〜X(11)
汎用出力接点8点 Y
(00)
〜Y
(07)
2量 XA
(0)〜XA
(1)
位置:P(00)
〜P(99)(100点)
速度:N(00)〜N
(15) (16点)
推力:T(00)
〜T(15) (16点)
加速時間:ACC
(0)
、ACC(1)(2点)
減速時間:DEC(0)、DEC(1)(2点)
プログラム制御命令(for〜next、ifs〜then〜else〜end if、until〜loopなど)
モーション命令(mov、speed、nchg、smovなど)
+、−、*、/、and、orなど
LT…M リニアモータテーブル LT…M
入
出
力
関
係
機
能
言
語
仕
様
6
制御回路用コネクタ(付属品)
項目
仕 様
言語形式
プログラム容量
5
ラム入力が可能です。
●分かりやすいプログラム言語で簡単に位置決め運転が
できます。
●位置指令データ100点、速度指令データ16点の記憶が
可能です。
● 入力12点、トランジスタ出力8点、アナログ入力(0
〜10V)の制御が可能です。
●パルス列指令入力による運転も可能です。
Windows쏐 95/98/Me/XP
Windows NT쏐、Windows2000쏐
備考 Windows쏐は、Microsoft Corporationの米国及びその他の
国における登録商標です。
265
推力と動的可搬質量・使用上の注意
■推力とは
LT45M
V
速度
■実効推力とは
2
FP2×ta+(FP−2×FL)
×ta+FL2×tc
Frms= ――――――――――――――――
t
n-M2用ざぐり穴
時間
L
K(取付穴:60ピッチ)
24
2.5
17
13.5
30
3-M3深4
30
12 7
FL
時間
1.5
(80)
(モータコード部)
25
79.6
ta
tc
40.5
42.5
Fa
38.5
FP
推力
運転パターンにおける所要推力の実効値です。
この値がリニアモータテーブルLT…Mの定格推力を超える
場合、モータが過熱、焼付きをおこす恐れがあります。ご使用
の際は実効推力を計算し、定格推力以下での使用を原則として
ください。ただし、使用環境等によって使用限界が変動するこ
とがあります。
一般的に実効推力(Frms)は以下のように求められます。
(計算例は総合解説の運転パターンの検討の項をご参照くだ
さい)
L
45
可動子が移動方向に押す力のことをいいます。
リニアモータテーブルLT…M
ta
1サイクル時間
t
(1500)
(エンコーダコード部)
ここで、FPは加減速に要する力、FLは走行抵抗による力です。走行抵抗にはリニアモータテーブルLT
…Mに組み込まれた直動案内機器の摩擦、コード引回し抵抗等があります。
14
ON
原点
■動的可搬質量とは
メカストッパ
ストローク長さ+6
必要加減速が得られる最大質量です。リニアモータテーブルLT…Mは搭載する質量が大きくなるにつ
れて、発揮できる加減速は低下しますので、ご使用の際は搭載質量と加減速の関係を考慮して、運転パ
ターンを検討してください。
■使用上の注意
ストローク長さ
LT45M-120
LT45M-180
LT45M-240
LT45M-300
120
180
240
300
mm
テーブル総質量(1) 可動部質量(1)
L
K
n
kg
kg
228
288
348
408
180
240
300
360
08
10
12
14
0.78
0.96
1.14
1.31
0.13
注(1) コードの質量は含みません。
電装システム
266
呼び番号
ベッド取付穴
LT…M リニアモータテーブル LT…M
・リニアモータテーブルLT…Mは精密機器ですので、過大な荷重や強い衝撃を与えないように、取扱い
には十分注意してください。
・リニアモータテーブルLT…Mは高精度な加工及び組立調整を行っておりますので、分解や改造は絶対
に行わないでください。
・移動するケーブルにはモータコード等が接続されますので、本体の設置スペース以外にコードを取り
回すためのスペースの確保が必要となります。なお、コードの取り回しは走行抵抗の増加や無理な力
が加わることがないように余裕をもった曲率で行ってください。
・水、油、粉じんなどがかからない清浄な環境でご使用ください。
・取付面には、ゴミや有害な突起などが無いことを確認してください。
・リニアモータテーブルLT…Mの取付面平面度は位置決め精度に影響しますので、10μm以下を推奨し
ます。
・リニアモータテーブルLT…Mに組み込まれている直動案内機器には、グリースが塗布されていますの
で、内部にゴミなどの混入のないように十分注意してください。
・リニアモータテーブルLT…Mは内部に強力な磁石を有しています。磁性体を近づけると吸引される恐
れがありますのでご注意ください。また、磁気の影響を受けやすい装置の近くでご使用になる場合に
は
にお問い合わせください。
・駆動させるためには、コントロールユニットのパラメータ設定が必要です。駆動モータに合わせたパ
ラメータ設定を確実に行ってください。
・リニアモータLT…Mの専用ドライバを使用する際には、セットアップソフトウェア、パソコン、パソ
コン接続ケーブル、I/Oコネクタが必要です。
・リニアモータテーブルLT…Mは、立軸には使用できません。
上記の事項以外にも、総合解説の使用上の注意の項をご参照ください。
単位
全長
267
NT…V・NT ナノリニア NT…V・NT
電装システム
269
268
NT…V・NT ナノリニア NT…V・NT
電装システム
271
270
NT…V・NT ナノリニア NT…V・NT
電装システム
273
272
呼び番号(NT…V)
諸特性(NT…V)
■テーブル性能
呼び番号の配列例
表1 仕様・性能
NT 55 V 65 / 5 L
形式
1
●
1 形式
●
●
2 大きさ
●
●
3 ストローク長さ
●
●
4 リニアエンコーダ分解能
●
NT55V25
項目
NT55V65
N
25
36
定格推力(2)
N
07
08
最大可搬質量
kg
有効ストローク長さ
mm
分解能
μm
0.10
0.5
0.10
0.5
0.10
0.5
0.10
0.5
0.10
0.5
最高速度
m/s
0.27
1.3
0.27
1.3
0.27
1.3
0.27
1.3
0.27
1.3
5
25
65
±0.5(3)
μm
g
170
170
280
280
0470
総質量(4)
g
420
500
680
830
1400
注(1)
(2)
(3)
(4)
0〜40℃・20〜80%RH(結露しないこと)
最大推力の持続時間は最大1秒です。
周囲温度20℃、金属製の相手部材に取り付けた場合です。
ナノリニアNT…Vの温度が安定した時の値を示します。
コードの質量は含んでいません。
NT…V:ナノリニアNT…V
●NT55V
55:幅寸法55mm
80:幅寸法80mm
10
8
推力 N
25: 25mm
65: 65mm
120:120mm(NT80Vに適用)
定格推力 N
NT55V65
30
20
NT55V25
1:0.1μm
5:0.5μm
0
500
0
1000
6
4
2
0
1500
0
10
テーブルの移動速度 mm/s
●
5 ケーブル引き出し方向
●
120
可動部質量
10
●
4 リニアエンコーダ分解能
●
65
繰返し位置決め精度
40
●
3 ストローク長さ
●
25
動的可搬質量 kg
●
2 大きさ
●
NT80V120
NT…V・NT ナノリニア NT…V・NT
●
1 形式
●
NT80V65
最大推力( )
使用周囲温度・湿度
●
5 ケーブル引き出し方向
●
NT80V25
L:左方向
R:右方向
20
30
40
NT55V65
1
NT55V25
0.1
0.01
1
50
環境温度 ℃
10
100
加速度 m/s2
図1に示すケーブル引き出し方向から選択します。
図2 NT55Vの推力特性
図3 NT55Vの定格推力特性
備考
金属製の相手部材に取り付けた場
合です。
図4 NT55Vの動的可搬質量
備考 テーブルの移 動 速 度 500mm/sの
ときの推力から算出した値です。
●NT80V
30
NT80V25
10
0
0
500
1000
1500
2
0
10
20
30
40
50
環境温度 ℃
図6 NT80Vの定格推力特性
備考
274
4
0
テーブルの移動速度 mm/s
図5 NT80Vの推力特性
6
金属製の相手部材に取り付けた場
合です。
1
NT80V25
0.1
NT80V120
0.01
1
10
100
加速度 m/s2
図7 NT80Vの動的可搬質量
備考 テーブルの移 動 速 度 500mm/sの
ときの推力から算出した値です。
275
電装システム
図1 ケーブル引き出し方向
NT80V65
20
NT80V65
動的可搬質量 kg
R:右方向
8
定格推力 N
推力 N
L:左方向
10
NT80V120
40
電装システム(NT…V)
■システム構成
■使用例
ナノリニアNT…Vには専用のドライバが用意されており、表2.1にテーブルの形式と適用ドライバ、表
2.2にシステム構成を示します。ドライバ仕様については、278ページのドライバ仕様の項をご参照くだ
さい。ご注文の際は、表2.1、表2.2に示す形式にて別途ご指定ください。
専用ドライバのプログラム機能を使用することにより、上位装置を必要としないシンプルなシステム
構成で、ナノリニアNT…Vを制御することが可能になります。以下に、システム構成例とプログラムサ
ンプルを示します。
表2.1
●運転パターン
テーブルの形式と適用ドライバの形式
qテーブル
●
速度
wドライバ
●
NT55V25
ADAX3-R5ML2-N 40
NT55V65
ADAX3-R5ML2-N 50
NT80V25
ADAX3-R5ML2-N 10
NT80V65
ADAX3-R5ML2-N 20
NT80V120
ADAX3-R5ML2-N 30
●システム構成例
P(00)
P(01)
P(02)
セットアップ
ソフトウェア
AHF
PC
プログラム作成
コンパイル
時間
検査中
搬出中
搬入中
P(02)
速度N(00)移動
HITACHI
ACSERVO
AD
速度N(01)移動
ADAX3-R5ML2
s e r i e s
SET
CHARGE
システム構成
(+)1
y セットアップソフトウェア
●
w ドライバ
●
PC
(+)
No.
名称
形式
RB
I/O
(−)
t
●
NT…V・NT ナノリニア NT…V・NT
プログラムアップロード
FUNC
表2.2
e
モータ中継コード
(3m
(1))
r
エンコーダ中継コード
(2m
(1))
L1
検査完了信号(X01)
TAE20G7-AM03
(注)サーボONとアラームリセットは、
I/Oコネクタからの入力が必要となります。
プログラム運転では行えません。
L2
L3
サーボON
U
パソコン
上位装置
・PLC、スイッチ、センサなど
u
●
i
●
q ナノリニアNT…V
●
t
TAE20R4-EC
セットアップ
ソフトウェア
u
I/Oコネクタ
(2)
i
電源コード
W
原点復帰(X09)
ENC
ADCH-AT2
パソコン接続ケーブル
(パソコン側Dsub9ピン)
(2m)
y
アラームリセット
V
AHF-P02
スタート信号(X00)
サーボ準備完了(Y00)
アラーム(Y01)
P(01)
P(00)
P(02)
位置決め完了信号(Y02)
ナノリニアNT…V
r
●
e
●
AC100V
(50/60Hz)
TAE20R5-CN
お客様でご用意ください。
注
(1) 特殊なコード長さについては
までお問い合わせください。
/10350-52F0-008(ハウジング)
(2) 住友スリーエム㈱製 10150-3000PE(プラグ)
●ドライバのパラメータ設定
ナノリニアNT…Vを動作させるためには、ドライバパラメータの初期設定が必要です。ドライバのパ
ラメータ設定は、セットアップソフトウェアにて行います。
ドライバ本体には、セットアップソフトウェア、パソコン接続ケーブルが添付されておりません。こ
れらは複数台のドライバで共用することが可能ですが、最低1組は必要となります。お客様の条件に合
わせて別途ご注文ください。
● I/Oコネクタ
276
電装システム
サーボONやアラームリセットの信号入力は、I/O端子からの入力が必須となります。
I/O端子への接続ケーブルは、ご使用条件に合わせてお客様でご用意ください。I/Oコネクタは別途用
意していますので、ご注文ください。
277
表3 ドライバの仕様
●セットアップソフトウェア操作画面例とプログラムサンプル
形式
基
本
仕
様
移動速度&加速・減速データ画面
プログラム編集画面
最大定格電流
(Arms)
最大瞬時電流
(Arms)
電源設備容量
(kVA)
入力電源
(主回路)
入力電源
(制御回路)
保護構造
(1)
制御方式
制御モード
フィードバック
速度指令/制限入力
推力指令/制限入力
位置指令
入
出
力
関
係
機
能
接点出力信号
■ドライバ仕様
φ6
(75)
57
130
(4)
5
52
ACSERVO
AD
内
部
機
能
(16)
150
6
制御回路用コネクタ(付属品)
エンコーダ
モニタ出力
内蔵オペレータ
外部オペレータ
回生制動回路
ダイナミックブレーキ
(3)
保護機能
HITACHI
ADAX3-R5ML2
series
160
ラム入力が可能です。
●分かりやすいプログラム言語で簡単に位置決め運転が
できます。
●位置指令データ100点、速度指令データ16点の記憶が
可能です。
● 入力12点、トランジスタ出力8点、アナログ入力(0
〜10V)の制御が可能です。
●パルス列指令入力による運転も可能です。
接点入力信号
使
用
環
境
注(1)
(2)
(3)
(4)
(5)
周囲温度/保存温度(4)
周囲湿度
耐振動(5)
使用場所
概略質量(kg)
0.9
2.7
0.3
単相100〜115V+10/−15%
50/60Hz±5%
開放型IP00
線間正弦波変調PWM方式
位置制御/速度制御/推力制御
A、B、Z式のインクリメンタルリニアエンコーダ(ラインドライバ:AM26LS31相当)
電源電圧5V±10%、消費電力:max280mA、最高周波数4MHz(4逓倍後)
アナログ入力:0〜±10V/最高速度(ゲイン設定可)
アナログ入力:0〜±10V/最大推力(ゲイン設定可)
ラインドライバ信号(2Mpps以下)
①正転パルス+逆転パルス ②符号入力+指令パルス
③90°
位相差二相パルス指令(最大周波数500kpps) ①〜③よりいずれか選択
DC12/24V接点信号入力(シンク/ソース対応可) (DC24V電源内蔵)
①サーボON ②アラームリセット ③制御モード切替 ④推力制限 ⑤正転駆動禁止
⑥逆転駆動禁止 ⑦多段速度1/電子ギア切替 ⑧多段速度2 ⑨速度比例制御/ゲイン切替
⑩速度ゼロクランプ/外部トリップ(Temp.信号)
(2) ⑪原点リミットスイッチ ⑫原点復帰
⑬パルス列入力信号許可/正転信号 ⑭偏差カウンタクリア/逆転信号
オープンコレクタ信号出力(シンク出力)
①サーボ準備完了 ②アラーム ③位置決め完了 ④速度到達/アラームコード1 ⑤ゼロ速度検出
⑥ブレーキ解除 ⑦推力制限中/アラームコード2 ⑧過負荷予告/アラームコード3
A、B相信号出力:ラインドライバ信号出力、Z相信号出力:ラインドライバ及びオープンコレクタ信号出力
2ch、0〜±3V電圧出力 速度検出値、推力指令など選択的に出力
5桁数字表示器、キー入力×5
Windows95/98/Me、WindowsNT/2000/XP パソコン接続可能(RS-232Cポート使用)
内蔵(ただし制動抵抗なし)
内蔵(動作条件設定可能)
過電流、過負荷、制動抵抗器過負荷、主回路過電圧、メモリ異常、CPU異常、主回路不足電圧、
CT異常、サーボON時地絡、制御回路不足電圧、外部トリップ入力(モータ温度異常)、
パワーモジュール異常、エンコーダ異常、位置偏差異常、位置監視時間異常、速度偏差異常、
過速度異常、駆動範囲異常、駆動禁止異常、サーボアンプ温度異常、アンマッチエラー、
不当命令エラー、ネスト回数エラー、実行エラー、磁極位置推定異常、磁極位置推定未実行
0〜55℃/−10〜70℃
20〜90%RH (結露しないこと)
2
10〜55Hz
5.9m/s(0.6G)
標高1000m以下、屋内(腐食ガス、塵埃のないところ)
0.8
NT…V・NT ナノリニア NT…V・NT
←検査完了入力X(01)のON待ち
←位置決め完了信号OFF
←速度N(00)でP(00)へ移動
←移動完了後、位置決め完了信号ON
←検査完了入力X(01)のON待ち
←位置決め完了信号OFF
←速度N(00)でP(01)へ移動
←移動完了後、位置決め完了信号ON
←検査完了入力X(01)のON待ち
←位置決め完了信号OFF
←速度N(01)でP(02)へ移動
←移動完了後、位置決め完了信号ON
←LOOPへ
● 簡易PLC機能により、最大512ステップまでのプログ
ADAX3-R5ML2-N □□
項目
ポジションデータ画面
保護方式はJEM1030に準拠します。
温度センサ信号を外部トリップ入力に接続した場合です。
ダイナミックブレーキは非常停止用としてお使いください。
保存温度は輸送中の温度です。
JISC0040の試験法に準拠します。
電装システム
278
279
ナノリニア NT…V
NT55V25
表4 ドライバのプログラム機能の仕様
項 目
仕 様
命令
演算子
6
3
(250)
55
予
約
語
変数点数
14
4-M3深4
3
外部デジタル
接点入力
外部出力
外部アナログ入力
20(原点位置)
12.5
(1/2ストローク長さ)
45
NT…V・NT ナノリニア NT…V・NT
入
出
力
機
能
80
17.5
48
実行形式
111(ストッパ間)
(4.5)
12.5
(1/2ストローク長さ)
42
プログラミング
支援機能
8
言
語
仕
様
BASICライク
512ステップ
(ドライバ内記憶は512ステップまで、または6kバイト以内)
テキスト入力、表示
(Windows쏐95/98/NT/2000/XP以上)
プログラムの文法チェック(Windows쏐95/98/NT/2000/XP以上)
プログラムロード、全クリア
シングルステップ
ブレークポイント
インタープリタ方式1.12ms/命令
サブルーチンコール可能:最大8ネスト
接点信号/オープンコレクタ信号入力(内部DC24V電源供給あり)
サーボON、アラームリセット、汎用入力接点12点X
(00)
〜X
(11)
汎用出力接点8点 Y(00)〜Y(07)
2量 XA
(0)〜XA
(1)
位置:P(00)〜P(99)(100点)
速度:N
(00)〜N(15) (16点)
推力:T(00)〜T(15) (16点)
(1)(2点)
加速時間:ACC(0)、ACC
減速時間:DEC(0)、DEC(1)(2点)
プログラム制御命令
(for〜next、ifs〜then〜else〜end if、until〜loopなど)
モーション命令(mov、speed、nchg、smovなど)
+、−、*、/、and、orなど
30
言語形式
プログラム容量
ケーブル引出し方向:右方向
(1500)
22.5
75
120
4-M3用ざぐり穴
備考 Windows쏐は、Microsoft Corporationの米国及びその他の国における登録商標です。
●セットアップソフトウェア
NT55V65
●ドライバパラメータの設定・参照・変更・印刷・保存
を行います。
●リアルタイムに運転状態及び出力状態のモニタを行う
151(ストッパ間)
●プログラムの編集、コンパイル、ダウンロード、アッ
項 目
図8 モニタ機能
14
4-M3深4
6
3
(250)
30
表5 セットアップソフトウェア動作環境
8
40(原点位置)
45
条 件
55
プロードを行います。
32.5
(1/2ストローク長さ)
80
17.5
48
●試運転やゲインチューニングを補助します。
3
(4.5)
32.5
(1/2ストローク長さ)
42
ことができます。
●速度、電流などをグラフ表示します。
DOS/Vパソコン
パソコン
メモリ:32Mバイト以上
OS
20
8-M3用ざぐり穴
30
60
30
160
電装システム
ディスプレイ解像度:800×600以上推奨
ケーブル引出し方向:右方向
(1500)
ハードディスク空き容量:30Mバイト以上
Windows쏐 95/98/Me/XP
Windows NT쏐、Windows2000쏐
備考 Windows쏐は、Microsoft Corporationの米国及びその他の
国における登録商標です。
280
281
ナノリニア NT…V
ナノリニア NT…V
NT80V25
NT80V120
111(ストッパ間)
31
12.5
(1/2ストローク長さ)
31
20(原点位置)
6-M3深5
60
(1/2ストローク長さ) 8
5
140
31
31
31
31
60
(1/2ストローク長さ)
16
10-M3深さ5
2
3
11.5
271(ストッパ間)
(4.5)
16
70(原点位置)
(250)
5
2
3
80
9
11.5
(4.5)
12.5
(1/2ストローク長さ)
22.5
27.5
12-M3用ざぐり穴
75
4-M3用ざぐり穴
45
45
45
45
80
45
280
120
備考1.標準システムでは、原点復帰をドライバのプログラム運転で行います。エンドストッパへ接触した後、原点位置にて停
止します。
2.標準システムでのオーバランリミット検出は、ドライバのソフトウェアリミットによる検出となります。ドライバのパ
ラメータによって距離設定が可能です。
2.ソフトウェアリミットは位置制御モードでのみ有効となりますので、速度・推力制御モードの場合は、必要に応じて外
部センサ等の設置をご検討ください。
3.NT80Vを組み合わせたXY二軸仕様のテーブルで、NT80V25が上軸となる仕様は、
にて組み付けて出荷します。
NT80V65
151(ストッパ間)
(4.5)
32.5
(1/2ストローク長さ)
32.5
(1/2ストローク長さ)
80
9
31
NT…V・NT ナノリニア NT…V・NT
ケーブル引出し方向:右方向
(1500)
ケーブル引出し方向:右方向
(1500)
68
62
45
80
68
45
62
(250)
31
6-M3深さ5
16
5
2
3
11.5
40(原点位置)
282
45
45
電装システム
8-M3用ざぐり穴
80
ケーブル引出し方向:右方向
(1500)
12.5
68
45
62
(250)
45
160
283
呼び番号(NT)
諸特性(NT)
■テーブル性能
呼び番号の配列例
表6 仕様・性能
NT
60 - 25
/
5
A
1
形式
項目
1
●
3 エンコーダ
●
●
1 形式
●
インターフェイスの指定
●
2 大きさとストローク長さ
●
●
4 接続コネクタの指定
●
●
5 仕様番号
●
NT80-120
25
25
0033
最大推力( )
N
定格推力(2)
N
最大可搬質量
kg
有効ストローク長さ
mm
分解能
μm
0.5
0.1
0.5
0.1
0.5
0.1
最大速度
m/s
1.5
1.0
1.5
1.0
1.5
1.0
繰返し位置決め精度
μm
07
05
25
65
●
2 大きさとストローク長さ
●
60- 25:幅寸法 60mm
60- 65:幅寸法 60mm
80-120:幅寸法 80mm
ストローク
25mm
ストローク
65mm
ストローク 120mm
±0.5(3)
可動部質量
g
170
170
0370
総質量(4)
g
530
650
1300
0〜40℃・20〜80%RH(結露しないこと)
注(1) 最大推力の持続時間は最大1秒です。
(2) 周囲温度20℃、金属製の相手部材に取り付けた場合です。
(3) ナノリニアNTの温度が安定した時の値を示します。
(4) コードの質量は含んでいません。
備考 立軸で使用する際には、
にお問い合わせください。
5:分解能0.5μm用インターフェイス(TAE2092-5IF)付き
1:分解能0.1μm用インターフェイス(TAE2091-1IF)付き
4.5
N
30
推力
142
127
100
45
20
kg
NT80
動的可搬質量
エンコーダインターフェイスは、ナノリニアNTのエンコーダコードに接続して使用します。接続するエンコーダインターフ
ェイスを指定することにより分解能を選択することができます。
NT60
10
0
41
20
500
1000
固定用ブラケット
(添付されてます)
19.2
2.9
16.2
テーブルの移動速度 mm/s
コネクタ
10
5
NT80
1
NT60
0.1
0.01
0
1.2
0120
NT…V・NT ナノリニア NT…V・NT
NT:ナノリニアNT
インターフェイスの指定
NT60-65
使用周囲温度・湿度
●
1 形式
●
●
3 エンコーダ
●
NT60-25
図9 推力特性
1500
1
10
100
加速度 m/s2
図10 動的可搬質量
備考 テーブルの移動速度500mm/sのときの推力から算出
した値です。
六角穴付きボタンボルトM4推奨
(添付されていません)
●
4 接続コネクタの指定
●
A:専用ドライバTDL1-1600用コネクタ
B:専用ドライバTDL1-1601用コネクタ
●
5 仕様番号
●
電装システム
ナノリニアNTには2種類の専用ドライバが用意されており、使用するドライバによって接続コネクタの種類が異なります。
ドライバの形式に合わせて指定してください。
1:仕様番号1
仕様番号は1のみとなります。
284
285
センサ仕様(NT)
電装システム(NT)
表7 センサのタイミングチャート
■システム構成
−
ナノリニアNTには2種類の専用ドライバが用意されており、使用するドライバによってシステム構成
が異なります。
専用ドライバTDL1-1600を使用したシステム構成を表8に、TDL1-1601を使用したシステム構成を表9
に示します。それぞれのドライバの仕様については、288ページのドライバ仕様の項をご参照ください。
ご注文の際は、表8、表9に示す形式にて別途ご指定ください。
+
表8 専用ドライバTDL1-1600を使用したシステム構成
y プログラム
u ティーチング ●
●
原点
ボックス
w ドライバ
●
q ナノリニアNT
●
コントローラ
B
OFF
CTN480G
C
有効ストローク長さ+3
+方向リミット
i
●
q
ナノリニアNT
w
ドライバ
TDL1-1600
e
電源コード
r
エンコーダコード
Program Controller
t
●
メカストッパ
D
E
エンコーダ
インターフェース
r
●
単位
大きさ
A
B(1)
C(1)
D(1)
E(1)
NT60- 25
26.5
3
4
3
3
NT60- 65
31.5
3
9
3
3
NT80-120
30.0
5
6
5
4
注
(1) 各数値は目安であり、保証値ではありません。
詳細な寸法が必要な際には、
にお問い合わせください。
備考 テーブル内部にセンサが内蔵されており、専用ドライバから各信号が出力されます。
お客様でご用意ください。
パソコン
OFF
mm
スイッチ、
シーケンサ等
e
●
DC電源
24V
AC100V
(50/60Hz)
TAE2088-EC
TAE2089-RSP(Dsub25ピン)
TAE2090-RSD(Dsub 9ピン)
t
RS232Cコード
y
プログラムコントローラ
CTN480G
u
ティーチングボックス
TAE10M5-TB
i
パルス・リミットコード
TAE10R6-LD
備考 エンコーダコード、パルス・リミットコードの長さは1.5mです。RS232Cコードの長さは2mです。
表9 専用ドライバTDL1-1601を使用したシステム構成
名称
No.
w ドライバ
●
q ナノリニアNT
●
パソコン
NT…V・NT ナノリニア NT…V・NT
OFF
形式
NT60…/A
NT80…/A
▲
原点前
−方向リミット
名称
No.
A
形式
q
ナノリニアNT
NT60…/B
NT80…/B
w
ドライバ
TDL1-1601
e
電源コード
r
エンコーダコード
t
RS232Cコード
t
●
r
●
エンコーダ
インターフェース
e
●
お客様でご用意ください。
TAE2088-EC
TAE2089-RSP(Dsub25ピン)
TAE2090-RSD(Dsub 9ピン)
AC100V
(50/60Hz)
286
電装システム
備考 エンコーダコードの長さは1.5mです。RS232Cコードの長さは2mです。
287
ナノリニア NT
■ドライバ仕様
NT60-25
ナノリニアNTには2種類の専用ドライバが用意されており、用途に応じて選択することができます。
どちらのドライバもRS232Cインターフェイスを使用したパソコンによる制御が可能です。また、オプ
ションのメイルボックス(自動実行プラグラムエリア)を付加することで、パソコンなどのホスト側に
負担をかけることのないドライバのみの自動運転も可能とします。ご希望の場合は
までお問い合
わせください。
TDL1-1600はTDL1-1601の機能に加えて、シーケンス入出力による外部機器との接続が可能で、
プログラムコントローラCTNを使用したシステムを構成することができます。
3
8
コード長さ:1500
(4.5)
TDL1-1601
TDL1-1600
80
114
19.5
60
NT…V・NT ナノリニア NT…V・NT
NT60-65
8-M3用ざぐり穴
185
36.5
30
60
14
3
30
60
3
コード長さ:3000
ドライバ
45
AC85〜110V 50/60Hz
0.7A
4A
電流フィードバック、オーバヒート(モータ、ドライバ)、推力制御、サーボオフ、+方向移動禁止、−方向移動禁止
40kHz
0〜40℃
70℃ max(過熱カット式)
+方向/−方向パルス又は位置指令パルス/方向指令
指令入力
通信にて入力します
又はA/B相 10MHz max(A/B相は2.5MHz)
2組インクリメンタルエンコーダ ラインドライバ
エンコーダ入力形式
1.5m/s max(分解能0.5μm時)
、1.0m/s max(分解能0.1μm時)
応答速度
サーボオン、+方向移動禁止、−方向移動禁止
シーケンス入力
通信にて入力します(1)
ゲインロー、リセット、運転
原点位置、原点前位置
−(2)
原点信号出力
サーボレディ、位置決め完了、アラーム
通信にて出力します(1)
シーケンス出力
4キー(桁選択、増、データ/パラメータ、書き込み)
パラメータキー
LED7セグメント5桁、出力電流/パラメータ/エラーコード等
データ表示
分解能、モード、電子ギア、ゲイン、位置決め完了、電気原点、加速度フィルタ等
パラメータ項目(不揮発メモリ)
2チャンネル(現在速度、出力電流)
アナログモニタ
振動0.5G、衝撃5G 1回
振動、衝撃
1.2kg
1.0kg
質量(参考)
4-M3深4
25(ストローク)
45
8
TDL1-1600
30
形式
φ
45
エンコーダ
インターフェイス
項目
主電源
連続定格電流
瞬時最大電流
出力制限
PWMキャリア周波数
周囲温度
放熱フィン温度
6
14
3
30
コード長さ:3000
ドライバ
表10 専用ドライバの仕様
寸法
4-M3用ざぐり穴
145
75
39
エンコーダ
インターフェイス
コード長さ:1500
4-M3深4
45
(4.5)
65(ストローク)
80
19.5
154
TDL1-1601
6
5
φ
5
NT80-120
12-M3用ざぐり穴
300
45
45
60
45
16
45
3
3
10
160
171
180
171
180
36
(5)
(5)
51
72
21
注
(1) シーケンス入出力を必要とする場合は、
(2) 通信にて原点復帰が可能です。
288
5
6
51
122
125
コード長さ:1500
(6)
3
19
にお問い合わせください。
備考
72
80
60
8-M3深4
エンコーダ
インターフェイス
40
40
電装システム
5
6
54
40
コード長さ:3000
ドライバ
40
120(ストローク)
142
274
NT…/AとNT…/Bは、ドライバに接続するコネクタの仕様が異なります。
289
使用上の注意
■推力とは
・ナノリニアは精密機器ですので、過大な荷重や強い衝撃を与えないように、取扱いには十分注意して
ください。
・ナノリニアは高精度な加工及び組立調整を行っておりますので、分解や改造は絶対に行わないでくだ
さい。
・ケーブルには極端に折り曲げるなどの無理な力を加えないでください。
・水、油、粉じんなどがかからない清浄な環境でご使用ください。
・取付面には、ゴミや有害な突起などが無いことを確認してください。
・ナノリニアの取付面平面度は位置決め精度に影響しますので、10μm以下を推奨します。
・ナノリニアに組み込まれている直動案内機器には、グリースが塗布されていますので、内部にゴミな
どの混入のないように十分注意してください。
・ナノリニアは内部に強力な磁石を有しています。磁性体を近づけると吸引される恐れがありますので
ご注意ください。また、磁気の影響を受けやすい装置の近くでご使用になる場合には
にお問い
合わせください。
・駆動させるためには、専用ドライバのパラメータ設定が必要です。駆動モータに合わせたパラメータ
設定を確実に行ってください。
・ナノリニアNT…Vの専用ドライバを使用する際には、セットアップソフトウェア、パソコン、パソコ
ン接続ケーブル、I/Oコネクタが必要です。
・立軸で使用する際には、
にお問い合わせください。
動作原理(270ページ)の図に示す可動子が移動方向に押す力のことをいいます。
推力は静止時に最大推力を発生し、速度の増加に伴って減少します。
加減速時に要する推力は275または285ページの推力特性グラフをご参照ください。
■実効推力とは
運転パターンにおける所要推力の実効値です。
この値がナノリニアの定格推力を超える場合、モータが過熱、焼付きをおこす恐れがあります。ご使
用の際は実効推力を計算し、定格推力以下での使用を原則としてください。ただし、使用環境等によっ
て使用限界が変動することがあります。
一般的に実効推力(Frms)は以下のように求められます。
2
FP2×ta+(FP−2×FL)
×ta+FL2×tc
Frms= ――――――――――――――――
t
ここで、FP は加速に要する力、FL は走行抵抗による力です。走行抵抗にはナノリニアに組み込まれた
直動案内機器の摩擦と磁石の吸引力による抵抗等があります。
■動的可搬質量とは
必要加減速が得られる最大質量です。ナノリニアは搭載する質量が大きくなるにつれて、発揮できる
加減速は低下しますので、ご使用の際は搭載質量と加減速の関係を考慮して、運転パターンを検討して
ください。
動的可搬質量のグラフ(275または285ページ)は、ナノリニアが速度500mm/s 時に発揮する推力を
基準にしたものです。例としてNT80V(275ページ)の1kgの搭載質量時の加減速は、最大で約15m/s2
ということになります。
上記の事項以外にも、総合解説の使用上の注意の項をご参照ください。
NT…V・NT ナノリニア NT…V・NT
推力と動的可搬質量
電装システム
290
291
RTの特長
RT
精密ロータリテーブル
1
高速・高精度な位置決めが可能
DD サーボアクチュエータを採用することで、最高回転数 2.5 s−1、繰返し位置決め精度±5 秒の高
速回転と高精度を両立。
2
高分解能光学式エンコーダを採用
エンコーダ分割数は、655,360 分割の超高分解能。最小回転角度は約 2 秒で、微小な回転位置決
めにも対応可能。
精密ロータリテーブルは、従来の減速機とアクチュエータとの組合せ機構に代わるDD サーボアクチュ
エータを使用することにより、バックラッシやロストモーションのない高速・高精度な位置決めを可能にし
た回転位置決めテーブルです。
精密ロータリテーブルは、DD モータと高分解能の光学式エンコーダ及びそれらを支える軸受により構
成されています。軸受には、一つであらゆる方向の荷重を受けることができ、産業用ロボットの分野で実
績のある
3
コンパクトで滑らかな回転
軸受にクロスローラベアリングを使用することで、高さ寸法が小さくコンパクトで、回転によるテー
ブル上面の振れも小さく滑らかな作動が可能です。
クロスローラベアリングを使用することで、コンパクト化と滑らかな回転を実現しています。
また、精密位置決めテーブルと組み合わせて、XY-θテーブルを構成することによって、半導体製造装
置や画像処理検査装置の高精度な位置決め機構として使用することが可能です。
RT 精密ロータリテーブル
上面テーブル
遮へいシール
遮へい板
ベッド
センサ
電装システム
精密ロータリテーブルの構造
292
293
呼び番号
諸特性
■モータ仕様
呼び番号の配列例
表1 モータ仕様
RT 116 A2 / SCT 045 - DR24
大きさ
RT116A2
項目
360度エンドレス
回転範囲
●
5 専用ドライバの指定
●
●
1 形式
●
●
3 センサ仕様
●
●
2 大きさ
●
最大トルク
N・m
最高回転数
s−1
耐荷重(1)
N
エンコーダ分割数
pulse/rev.
回転部のイナーシャ
kg・m2
●
4 リミット位置の指定
●
RT158A2
4
2.5
100
4
2.5
100
655,360
2.5×10−3
3.8×10−3
センサ付き・上面テーブル付き
5.5×10−3
8.5×10−3
注(1) 機能上、性能上支障なく使用することができる最大荷重です。精度が保証できる荷重はこの値の約1/2になります。
■トルク・速度特性
5
N・m
116:テーブルの直径116mm
158:テーブルの直径158mm
無記号:センサなし
●
3 センサ仕様
●
MT
:センサなし・上面テーブル付き
SCT
:センサ付き・上面テーブル付き
4
3
RT 精密ロータリテーブル
●
2 大きさ
●
RT…A2:精密ロータリテーブル
出力トルク
●
1 形式
●
2
1
0
0.5
1.0
1.5
回転数 s−1
2.0
2.5
図1 トルク特性
000:遮へいシール添付
●
4 リミット位置の指定
●
015:± 15°、 030:± 30°、 045:± 45°、 060:± 60°
075:± 75°、 090:± 90°、 105:±105°、 120:±120°
135:±135°、 150:±150°
リミットセンサの動作位置を指定します。
遮へいシール添付(000を指定)は、お客様で遮へいシールを必要な角度だけ切り取って、リミットの位置を調整していただ
■精度
表2 精度
大きさ
項目
位置決め精度
秒
繰返し位置決め精度
秒
テーブル上面の振れ
mm
RT116A2
RT158A2
60
±5
0.010
20
±5
0.010
きます。
3 の項のセンサ仕様をセンサなし(無記号又はMTを指定)とした場合は、無記号としてください。
●
●
5 専用ドライバの指定
●
DR24 :専用ドライバを添付(ドライバⅠ/O電源 DC24V仕様)
DR5 :専用ドライバを添付(ドライバⅠ/O電源 DC5V仕様)
電装システム
294
295
センサ仕様
表3 遮へいシールの寸法
W
遮へいシール
b
CW
原
点
原
点
リ
前
ミ
ッ
ト
a
CC
ON
OF
F
(1.5
°
)
b
F
OF
OFF
b
b
RT 精密ロータリテーブル
遮へいシールの角度
呼び番号
図2 センサのタイミングチャート
備考1. センサの取付けは、呼び番号で指定します。
2. 原点センサは付いていません。エンコーダのZ相信号を使用してください。
3. 各センサの仕様については総合解説のセンサ仕様の項をご参照ください。
リミット位置
a
b
−
−
290°
15°
260°
30°
230°
45°
200°
60°
170°
75°
140°
90°
110°
105°
80°
120°
50°
135°
20°
150°
電装システム
RT116A2/SCT000(1)
RT158A2/SCT000(1)
RT116A2/SCT015
RT158A2/SCT015
RT116A2/SCT030
RT158A2/SCT030
RT116A2/SCT045
RT158A2/SCT045
RT116A2/SCT060
RT158A2/SCT060
RT116A2/SCT075
RT158A2/SCT075
RT116A2/SCT090
RT158A2/SCT090
RT116A2/SCT105
RT158A2/SCT105
RT116A2/SCT120
RT158A2/SCT120
RT116A2/SCT135
RT158A2/SCT135
RT116A2/SCT150
RT158A2/SCT150
シール角度
1
注( ) お客様で遮へいシールを必要な角度だけ切り取って、リミット位置を調整していただきます。
備考 リミット位置を指定した場合、必要角度の遮へいシールが遮へい板に貼り付けられます。
296
297
電装システム
精密ロータリテーブル
■ドライバ仕様
RT116A2
4-M6用穴
6-M4深6
(等分配置)
UD1CG3-004N-1AA-1SA-N/CN
(80)
UD1BG3-004N-1AB-1SA-N/CN
150±1
取付寸法
(160)
(60)
60±1
UD1BG3-004N-1AB-1SB-N/CN
4
質量4.7kg
通
5貫
φ2 5)
7深
H
(
50±0.2
34
(15)
(195)
195±1
185±0.5
φ104
160
UD1CG3-004N-1AB-1SA-N/CN
140
表4 横河電機
(株)製専用ドライバの仕様
120
140
160
RT158A2
差動入力
保護回路
電源電圧
最大消費電力
回生故障検出、速度過大、位置偏差過大、ハードオーバトラベル
単相 AC100〜115V −15%〜10%
50/60Hz
センサ、上面テーブル付きテーブルの寸法
4-M6用穴
6-M4深8
(等分配置)
1.3kVA
周囲温度(使用時)
0〜50℃
周囲湿度(使用時)
20〜90%RH
質量(参考)
8
2MHz
エンコーダ異常、過電圧、過電流、母線電圧低下、主電源断、過負荷、
通
5貫
φ2 5)
深
7
(H
1.2kg
φ104
(15)
34
備考1. 適用するモータコードの形式はTAE20K7-RM□□、エンコーダコードの形式はTAE20K8-RE□□です。
2. モータコード、エンコーダコード長さは、形式末尾の□□にて1〜20mまで1m単位で指定します。
(3mの場合の例:TAE20K7-RM03)
3. DC24V仕様の専用ドライバは、
プログラムコントローラと組み合わせて使用することができます。ご要望の際
は、
にお問い合わせください。
質量5.6kg
160
最大入力周波数
24
指令パルス入力形態
RT 精密ロータリテーブル
PLS/SIGN、UP/DOWN、A/B
39
RT116A2
指令パルス入力方式
3
UD1BG3-004N-1AB-1SA-N/CN
UD1BG3-004N-1AB-1SB-N/CN
140
適用
UD1CG3-004N-1AA-1SA-N/CN
UD1CG3-004N-1AA-1SB-N/CN
82
DC24V仕様
DC5V仕様
90
ドライバ
形
式
φ116
φ90 -0.02
-0.06
120
140
160
8
39
92
100
φ154
電装システム
(99)
φ116
24
(30)
298
299
精密ロータリテーブル
RT158A2
4-M6用穴
6-M4深6
(等分配置)
140
貫通
φ25 5)
深
(H7
φ14
160
質量3.3kg
(15)
34
6
120
140
160
φ158
-0.02
3
φ136 -0.06
7.5
38.5
42
RT 精密ロータリテーブル
センサ、上面テーブル付きテーブルの寸法
4-M6用穴
6-M4深8
(等分配置)
140
100
貫通
φ25 5)
深
(H7
(15)
34
φ14
6
160
質量4.5kg
120
140
160
φ194
300
52
38.5
60
電装システム
(59)
φ158
7.5
(50)
301
AT 精密アライメントテーブル
精密アライメントテーブル AT を使用した多軸構成例
テーブル
モータ
ベッド
電装システム
精密アライメントテーブル AT の構造
302
303
呼び番号・諸特性・センサ仕様
呼び番号の配列例
AT 120
A /
V005
●
1 形式
●
●
3 モータの種類
●
●
2 大きさ
●
●
1 形式
●
AT…A:精密アライメントテーブル
120:テーブルの直径 120mm
●
2 大きさ
●
200:テーブルの直径 200mm
300:テーブルの直径 300mm
ACサーボモータをご指定の場合は362ページをご参照ください。
●
3 モータの種類
●
表2 諸特性
項目
大きさ
AT120A
AT200A
AT300A
ボールねじの ローテータの
リード
分解能
mm
μm
動作
角度範囲
度
1
1(1)
±05
2
2(1)
±10
繰返し
位置決め精度
秒
±1
耐荷重 テーブルイナーシャ J T 起動トルク T 0
×10−5kg・m2
N・m
N
100
300
500
0.012
0.014
0.180
0.03
0.03
0.04
注(1) モータの分割数が1000pulseのときの値です。
AT 精密アライメントテーブル
ステッピングモータをご指定の場合は369ページをご参照ください。
動作角度範囲
電装システム
OFF
CWリミット
OFF
CCWリミット
図1 センサのタイミングチャート
304
305
組合せ例
精密アライメントテーブル
■XY-θ多軸位置決め機構の構成
AT120A
精密アライメントテーブルATは、単軸仕様・多軸仕様の
精密位置決めテーブルと組み合わせる
ことで、簡単にXY-θ多軸位置決め機構を構成することができます。組立高さが低くコンパクトで高精
度な位置決めが可能なので、精密測定器・検査機・組立器などのアライメント用テーブルとして使用す
ることができます。
LM
2-φ7
表1 多軸位置決め機構の構成例
Y軸
50
TS125/220
120
TS220/220
120
TS220/310
180
精密位置決めテーブル
TS260/350
250
TS・CT形
CT125/125
50
50
CT220/220
120
120
CT260/350
150
250
CT350/350
250
250
φ
貫 30
通
φ100
95
X軸
TS125/125
単軸仕様
4-M6通し
(等分配置)
ストローク長さ
112
多軸位置決め機構の外観
精密アライメントテーブルATに組み合わせる
精密位置決めテーブルの形式
h
2-φ7
11深ざぐり深25
0
φ
12
二軸仕様
11
116
200
177
250
9
TSLH120M
AT 精密アライメントテーブル
95
100、150
300
200、250、300
400
15
300
400、500
15
TSLH320M
500
TSLH420M
50
TSLH220M
49.5
150
単軸仕様
600
800
精密位置決めテーブルLH
TSLH・CTLH形
CTLH120M
二軸仕様
CTLH220M
306
100
200
100
200
200
300
200
300
300
4.4kg(モータの質量は含まれていません)
モータ部寸法
200
200
モータの種類
300
200
モータ記号
300
300
400
300
400
400
300
300
400
300
400
400
500
400
500
500
単位
ACサーボモータ
mm
ステッピングモータ
Y027
P001
J001
V005
h
97
93
101.5
52
LM
77
73
081.5
47
電装システム
CTLH320M
質量
100
307
精密アライメントテーブル
精密アライメントテーブル
AT300A
h
LM
LM
h
4-M6通し
(等分配置)
4-φ7
4-φ9
φ14深ざぐり深2
6-M8通し
(等分配置)
φ
13
貫通 0
AT200A
φ
貫
68
φ270
220
240
23
00
φ3
160
AT 精密アライメントテーブル
11
160
180
通
0
φ18
0
20
φ
220
180
248
241
12
15
64
65
50
49.5
13
9
330
質量 9.9kg(モータの質量は含まれていません)
モータ部寸法
単位
ACサーボモータ
モータの種類
mm
質量 21.0kg(モータの質量は含まれていません)
モータ部寸法
ステッピングモータ
モータの種類
モータ記号
単位
ACサーボモータ
Y027
P001
J001
V005
Y028
P002
J002
V009
h
63
59
67.5
18
h
82.5
091
84.5
47.5
LM
77
73
81.5
47
LM
94.5
103
96.5
59.5
モータ記号
mm
ステッピングモータ
電装システム
308
309
SA…M・AMの特長
SA…M
AM
アライメントステージ モジュール形
アライメントステージモジュール形 SA…M は、角度調整機構をもったアライメントモジュール AM を
同一平面上に配置した大形の精密位置決めテーブルです。
XY 方向の直線運動と、角度補正を行うことができ、特に角度補正は任意の位置を回転中心に設定でき
るため、動作の自由度が高く、多彩な動作を実現しています。ステージとベースには大口径の中抜き構造が
採用されているため、半導体・液晶関連製造装置及び検査装置などのアライメントステージに最適です。
SA…M・AM アライメントステージ モジュール形
アライメントモジュール AM は、
は、S 精密位置決めテーブル TU と、
と、S 高剛性形クロスローラ
ベアリング、S
ベアリング、
リニアウェイ E を組み合せて、アライメントステージ用に開発された位置決めモジュ
ールです。
高さ寸法の許容差を± 10 μm と高精度に管理しているので、各アライメントモジュールの高さ調整を
することなくアライメントステージを構成できます。
モータ
ステージ
リニアウェイ
ボールねじ
ベース
モータブラケット
アライメントモジュール
トラックレール
クロスローラベアリング
電装システム
センサ
アライメントステージモジュール形SA…Mの構造
310
アライメントモジュールAMの構造
311
呼び番号
呼び番号の配列例(アライメントステージ
SA
420
モジュール形)
M 4 A / Y027
●
1 形式
●
呼び番号の配列例(アライメントモジュール)
G 4
AM 40-30 A / Y027 G 4
A
●
1 形式
●
●
2 大きさとストローク長さ
●
●
3 モータの有無
●
●
3 駆動軸仕様
●
●
4 モータの種類
●
●
4 モータの有無
●
●
5 ボールねじの種類及び有無
●
●
5 モータの種類
●
●
6 ボールねじのリード
●
●
6 ボールねじの種類
●
●
7 モータ・センサリード線の配線方向
●
SA…M・AM アライメントステージ モジュール形
●
2 大きさ
●
●
7 ボールねじのリード
●
●
1 形式
●
●
1 形式
●
SA…M:アライメントステージ モジュール形
●
2 大きさとストローク長さ
●
250:ステージの外形寸法 □250mm
●
2 大きさ
●
420:ステージの外形寸法 □420mm
3 モータの有無
●
AM:アライメントモジュールAM
25-030:幅寸法25mm
ストローク長さ030mm、高さ寸法047mm
40-030:幅寸法40mm
ストローク長さ030mm、高さ寸法078mm
60-090:幅寸法60mm
ストローク長さ090mm、高さ寸法110mm
86-120:幅寸法86mm
ストローク長さ120mm、高さ寸法148mm
無記号:モータなし
A
:モータ付き
800:ステージの外形寸法 □800mm
●
4 モータの種類
●
3 駆動軸仕様
●
●
4 モータの有無
●
3:X軸2軸駆動、Y軸1軸駆動
4:X軸2軸駆動、Y軸2軸駆動
A:モータ付き
適用モータについては363ページをご参照ください。
3 のモータの有無の指定をモータなし(無記号)とした場合
●
・モータ記号を選択すると、各モータに適用するモータアタッチメントとカップリングを取り付けて納入されます。
・無記号を選択すると、モータアタッチメントとカップリングはなしで納入されます。
●
5 ボールねじの種類及び有無
●
G:研削ボールねじ
N:ボールねじなし
3●
4●
6●
7 の項は無記号としてください。
Nを選択した場合、●
●
5 モータの種類
●
適用モータについては362ページをご参照ください。
●
6 ボールねじのリード
●
G:研削ボールねじ
●
7 モータ・センサリード線
●
●
7 ボールねじのリード
●
312
4:リード4mm(SA250M、SA420Mに適用します)
5:リード5mm(SA800Mに適用します)
の配線方向
5:リード5mm(AM60、AM86に適用します)
電装システム
●
6 ボールねじの種類
●
4:リード4mm(AM25、AM40に適用します)
A:モータ側から見て左側に配置
B:モータ側から見て右側に配置
AM25は、Bのみの設定です。
313
諸特性
センサ仕様
■精度
■耐荷重
表1.1
SA…Mの精度
形式と大きさ
表3 耐荷重
最大動作範囲
X・Y運動(1)
角度補正運動
(2)
mm
度
±15
±15
±45
SA250M
SA420M
SA800M
繰返し位置決め精度
X・Y運動(1)
角度補正運動
(2)
mm
秒
±10
±50
±80
形式
±6 0
±3 0
±1.5
±0.002
SA…M
注
(1) ステージが基準位置にある時の値です。
(2) ステージが基準位置にあり、ステージ中心位置を回転中心とした時の値です。
表1.2
AM
AMの精度
単位 mm
AM25
AM40
AM60
AM86
030
030
090
120
繰返し
トラックレール
位置決め精度
(1)
長さ
130
180
290
390
±0.002
位置決め
精度
(1)
運動の
平行度B
バックラッシ
(1)
0.020
0.008
0.003
耐荷重
N
SA250M
SA420M
SA800M
AM25
AM40
AM60
AM86
98(1)
470(1)
680(1)
100(2)
500(2)
790(2)
3040(2)
注(1) ステージ上の任意の位置に負荷できる荷重です。
(2) モジュール1台あたりに負荷できる荷重を示します。
(2) ステージを構成する際には、荷重負荷位置より、モジュール
1台あたりの荷重を計算してください。
■テーブルイナーシャと起動トルク
注
(1) ボールねじなし仕様には適用しません。
SA…M・AM アライメントステージ モジュール形
形式と大きさ
ストローク
長さ
(1 )
形式と大きさ
表4 テーブルイナーシャと起動トルク
表1.3
AMの高さ寸法
単位
mm
形式
形式と大きさ モジュール高さ寸法 高さ寸法の許容差
AM25
AM40
AM60
AM86
備考
047
078
110
148
SA…M
±0.010
上下軸が直交し、かつ、各軸の直動案内部が
ストローク中央にある状態での、設置面から
モジュール上面中央までの値です。
AM
形式と大きさ
テーブルイナーシャ JT
×10−5kg・m2
起動トルク T0
N・m
SA250M
SA420M
SA800M
AM25
AM40
AM60
AM86
0.102
0.48
3.50
0.028
0.08
0.59
4.97
0.02
(1)
0.07
(1)
0.12
(1)
0.02
0.07
0.12
0.17
注(1) 参考値です。
■最高速度
表2 最高速度
形式
SA…M
AM
形式と大きさ
SA250M
SA420M
SA800M
AM25
AM40
AM60
AM86
ボールねじのリード
mm
4
モータ回転数
r/min
3000
5
最高速度
mm/sec
200
250
4
200
3000
5
250
電装システム
314
315
センサ仕様
動作仕様
表5.1
■動作仕様
SA…Mのセンサのタイミングチャート
原点位置=ストローク中央
A
原点(エンコーダC相)
ON
B
原点前センサ
C
CCWリミットセンサ
CWリミットセンサ
OFF
OFF
( E)
D
OFF
(F)
メカストッパ
反モータ側
モータ側
単位
A
B
C
D
E
F
SA250M
SA420M
SA800M
4
4
5
2
2
3
15
15
45
30
30
90
08
08
16
046
048
117
表5.2
mm
基準位置
X運動
Y運動
XY運動
中心基準角度補正
任意位置基準角度補正
SA…M・AM アライメントステージ モジュール形
大きさ
AMのセンサのタイミングチャート
B
ON
原点(エンコーダC相)
C
原点前センサ
D
CCWリミットセンサ
CWリミットセンサ
A(1)
OFF
メカストッパ
ストローク長さ
OFF
OFF
(E)
(F)
単位
大きさ
A
B
C
D
E
F
AM25
AM40
AM60
AM86
090
090
133
155
4
4
5
5
2
2
3
3
15
15
45
60
08
08
16
08
046
048
117
135
mm
注
(1) 原点はストローク中心です。
電装システム
316
317
アライメントステージモジュール形
アライメントステージモジュール形
SA250M 3軸駆動仕様
M1
250
200
160
90
SA420M、SA800M
4-M5深さ8
4-M10通し
4-M6通し
8-M6深さ12
Lx
P x3
4-M10深さ20
P x2
P x1
P y1
P y2
1
A1
9
質量
B1
C
B1
8-φ9通しφ14深ざぐり深さ11(SA420M)
8-φ11通しφ17.5深ざぐり深さ15(SA800M)
B
モータ記号
形式
9
単位
AL6
HL6
20
17
4-M12通し(SA420M)
4-M12深さ24(SA800M)
X軸
mm
D2
H
SA250M3
M 1の寸法
t2
65
モータ突出部
100
160
C
6.0kg
2
X軸
70
1
300
8-φ6.6
φ11深ざぐり深さ6.5
M1
単位 kg
質量
SA250M 4軸駆動仕様
M1
250
200
160
90
t1
D1
Sy
大きさ
4-M5深さ8
4-M10通し
4-M6通し
仕様
3軸駆動
4軸駆動
SA420M
29.7
30.0
SA800M
118.5
119.4
100
160
70
90
160
200
250
R1
0
R1
0
300
140
300
Lx
Ly
H
t1
t2
D1
D2
C1
C2
R1
R2
Sx
Sy
SA420M
500
500
420
420
120
25
25
230
190
30
30
15
15
300
300
SA800M
900
900
800
800
170
35
35
490
400
25
50
20
20
580
580
大きさ
A1
B1
P x1
P y1
P x2
P y2
P x3
P y3
SA420M
225
225
105
105
160
160
360
360
SA800M
420
420
220
220
300
300
700
700
質量
モータ突出部
モータ記号
9
形式
SA250M4
M 1の寸法
6.2kg
単位
mm
AL6
HL6
20
17
電装システム
100
160
318
B
M1
65
X軸
70
8-φ6.6
φ11深ざぐり深さ6.5
9
M1
140
M1
A
単位 mm
140
Y軸
140
単位 mm
大きさ
SA…M・AM アライメントステージ モジュール形
M1
140
D2
P y3
Ly
Y軸
A
R
140
D1
Sx
2
P y1
P y2
A1
100
160
70
90
160
200
250
R1
0
R1
0
300
R
140
Y軸
140
P x2
P x1
319
アライメントモジュールAM
アライメントモジュールAM
AM25 モータ付き・ボールねじ付き
モータ付き・ボールねじ付き
15 15 15 15 13
AM40
3.5
5-M3通し
7
(24)
7.5
15
35
2×3-φ2.9
φ4.8深ざぐり深さ1.6
35
(25)
LM
35
130
5
165
(モータにより異なる)
5
(70)
78±0.010
28.5
1.5
0.3
(25)
LM
質量
18
40
0.6kg
AM25 モータなし・ボールねじなし
60
30
180
質量 1.7kg
モータなし・ボールねじなし
3-M4 深8
50
120
50
10
15 15 15 15 13
AM40
60
2×3-3.4キリ
6.5深ざぐり深3.1
7.5
5-M3通し
15
(24)
35
35
18
40
130
質量
320
5
(25)
78±0.010
35
2×3-φ2.9
φ4.8深ざぐり深さ1.6
(70)
0.4kg
2×3-3.4キリ
6.5深ざぐり深3.1
60
60
180
30
質量 1.4kg
321
電装システム
9
24.9
(25)
1.5
47±0.010
5
86
(24)
SA…M・AM アライメントステージ モジュール形
9
24.9
(46.4)
9
186
47±0.010
16
(24)
1.5
86
5
50
120
50
10
3-M4深8
アライメントモジュールAM
アライメントモジュールAM
AM60 モータ付き・ボールねじ付き
モータ付き・ボールねじ付き
35
AM86
5-M8 深16
350
70
50
70
50
50
220
70
50
70
10
5-M6深12
11.5
23
17
34
8
LM
298
(モータにより異なる)
(59)
(99)
(152)
LM
(モータにより異なる)
(99)
8
(102)
28
60
100
35
質量
46
86
5.5kg
290
AM60 モータなし・ボールねじなし
100
2×4-7キリ
11深ざぐり深7
質量
16.9kg
質量
14.3kg
モータなし・ボールねじなし
5-M6 深12
5-M8 深16
70
50
70
350
70
220
50 50
70
50
10
35
390
35
AM86
49.5
148±0.010
42
100
2×3-5.5キリ
9.5深ざぐり深5.4
SA…M・AM アライメントステージ モジュール形
110±0.010
6
(59)
13
398
11.5
23
(102)
34
(59)
(99)
(152)
100
290
148±0.010
110±0.010
322
100
2×3-5.5キリ
9.5深ざぐり深5.4
35
質量
4.6kg
46
86
2×4-7キリ
11深ざぐり深7
100
35
390
323
電装システム
28
60
(99)
8
6
(59)
17
アライメントステージ ダイレクトドライブ形 SA…DE は、直動案内部に
部に
リニアウェイ L、回転案内
クロスローラベアリングを使用し、駆動部にダイレクトドライブ方式を採用した、低断面でコン
パクトな、XYθ運動を実現するアライメントステージです。
アライメントステージ SA…DE は、高分解能リニアエンコーダと、フルクローズドループ制御の組み合
わせにより、バックラッシのない高精度な位置決め動作を実現します。
さらに、直線移動用の X 軸可動テーブルと、回転位置決め部であるθ軸ターンテーブルを標準化してい
SA…DE アライメントステージ ダイレクトドライブ形
るので、X軸とθ軸の組み合わせや、XY 軸のアライメントテーブルを簡単に構築することができます。
半導体・液晶関連製造装置など、画像処理を利用したアライメント処理やクリーンな環境を要求される測
定器や検査装置などの位置決め機構として最適です。
電装システム
324
325
呼び番号
呼び番号の配列例
SA
120
DE
/
5
XYS
R
1
●
1 形式
●
●
2 大きさ
●
●
3 分解能
●
●
4 軸構成
●
●
5 表面処理
●
●
6 仕様番号
●
SA…DE:アライメントステージ ダイレクトドライブ形
●
2 大きさ
●
120:□120、φ120
65:□ 65、φ 65
φ200
200:
●
3 分解能
●
1:0.1μm
X軸またはXY軸のリニアエンコーダの分解能を指定します。
5:0.5μm
4 の軸構成の項で、S:θ軸のみを選択する場合は、分解能は無記号を選択してください。
●
X:X軸
4 軸構成
●
軸の構成は表1をご参照ください。
Y:Y軸
S:θ軸
表1 軸構成と適用
軸構成
SA65DE
SA120DE
SA200DE
X
:X軸のみ
○
○
−
S
:θ軸のみ
○
○
○
XY
:XYの2軸構成
○
○
XS
:Xθの2軸構成
○
○
○
○
XYS :XYθの3軸構成
●
6 仕様番号
●
無記号 :無電解ニッケルめっき
R
:黒色クロム皮膜処理
−
表面処理はテーブルとベッドの表面に施します。
1:仕様番号1
仕様番号は1のみとなります。
326
327
電装システム
●
5 表面処理
●
SA…DE アライメントステージ ダイレクトドライブ形
●
1 形式
●
諸特性
電装システム
■ステージ仕様
■システム構成
表2.1
仕様・性能
表3 システム構成
形式
項目
最大推力
(1)
定格推力
(2)
有効ストローク長さ
最大可搬質量
分解能
最高速度
(3)
繰返し位置決め精度(4)
可動部質量
総質量
(5)
使用周囲温度・湿度
SA65DE/1X
N
N
mm
kg
μm
m/s
μm
kg
kg
SA65DE/5X
0.10
0.27
SA120DE/5X
ティーチングボックス
TAE10M5-TB
70.0
15.0
20.0
05.9
0.5
0.5
0.1
0.4
分解能
最高速度
(3)
繰返し位置決め精度(4)
可動部慣性モーメント
総質量
(5)
使用周囲温度・湿度
N・m
N・m
kg
度
秒
pulse/度
度/s
秒
kg・m2
kg
e
SA65DE/S
SA120DE/S
SA200DE/S
0.5
0.06
2.2
50
0.64
5625
720
±1.3
0.00012
0.5
2.0
0.4
6.8
60
0.36
10000
400
±0.8
0.002
2
0〜40℃・20〜80%RH(結露しないこと)
4.0
1.2
12.3
280
0.25
14400
270
±0.5
0.013
6
kg
動的可搬質量
kg
動的可搬質量
1
0.1
1
r
(4) ステージの温度が安定した時の値を示します。
(5) コードの質量は含んでいません。
SA 65DE/X
TDL1-1600/06L
TAE20Q4-EC
―
―
TAE10R6-LD
TAE2089-RSP(Dsub25)
SA 65DE/S
TDL1-1600/06S
TAE2088-EC
―
―
TAE10R6-LD
TAE2090-RSD(Dsub 9)
―
―
TAE10R6-LD×2
―
―
TAE10R6-LD×2
―
―
TAE10R6-LD×3
TAE2089-RSP(Dsub25)―
×3
TAE2090-RSD(Dsub 9)―
SA 65DE/XY
SA 65DE/XS
SA 65DE/XYS
100
TDL1-1600/06L
+
TDL1-1600/06S
TAE20Q4-EC
+
TAE2088-EC
TDL1-1600/06L×2 TAE20Q4-EC×2
+
+
TDL1-1600/06S×2
TAE2088-EC
1
TDL1-1600/12L
TAE2088-EC
―
―
TAE10R6-LD
TAE2089-RSP(Dsub25)
TDL1-1600/12S
TAE2088-EC
―
―
TAE10R6-LD
TAE2090-RSD(Dsub 9)
SA120DE/XY
TDL1-1600/12L×2
TAE2088-EC×2
―
―
TAE10R6-LD×2
SA120DE/XS
TDL1-1600/12L
+
TDL1-1600/12S
TAE2088-EC×2
―
―
TAE10R6-LD×2
TDL1-1600/12L×2
+
TAE2088-EC×3
TDL1-1600/12S×2
―
―
TAE10R6-LD×3
TAE2089-RSP(Dsub25)―
×3
TAE2090-RSD(Dsub 9)―
TAE20K5-MC03
TAE10G4-LC03
TAE10R6-LD
TAE2089-RSP(Dsub25)
TAE2090-RSD(Dsub 9)
SA200DE/S
注(1)
備考1.
2.
3.
4.
0.1
1
10
TAE2089-RSP(Dsub25)―
×2
TAE2090-RSD(Dsub 9)
SA120DE/S
SA120DE/S
SA65DE/S
0.01
TDL1-1600/06L×2 TAE20Q4-EC×2
SA120DE/X
SA200DE/S
10
tリミット
●
yパルス・リミットコード ●
●
uRS232C接続コード
中継コード
TDL1-1600/20S
TAE2088-EC
SA65DEのXY軸には、エンコーダインターフェイスはありません。
エンコーダコード、モータ中継コードおよびリミット中継コード長さは3mです。
パルス・リミットコード長さは1.5mです。
RS232Cコード長さは2mです。
SA…DEを複数軸で使用する際のドライバ間の軸間ケーブル(⑧)については、
TAE2089-RSP(Dsub25)×2
×2
TAE2090-RSD(Dsub 9)
までお問い合わせください。
100
外周の加速度 m/s2
電装システム
10
加速度 m/s2
r
u
〈θ軸〉
SA65DE/X
エンコーダ
インターフェイス(1)
t
q形式と大きさ ●
●
wドライバ形式 ●
eエンコーダコード ●
rモータ中継コード
SA120DE/X
e
r
SA120DE/XYS
0.01
e
パソコン
(4) ステージの温度が安定した時の値を示します。
(5) コードの質量は含んでいません。
〈X(Y)軸〉
10
i
y y
0.17
1.2
0.35
2.5
0〜40℃・20〜80%RH(結露しないこと)
注
(1) 最大推力の持続時間は最大1秒です。
(2) 周囲温度20℃、金属製の相手部材に取り付けた場合です。
にご相談ください。
(3) 表示の速度を超える場合については、
qアライメントステージ
ダイレクトドライブ形SA…DE
図1 動的可搬質量
備考 θ軸の動的可搬質量は鋼の立方体として計算した値です。また、加速度はステージ外周部の値として換算しています。
328
SA…DE アライメントステージ ダイレクトドライブ形
項目
最大トルク
(1)
定格トルク
(2)
最大可搬質量
有効動作角度
i
y
0.5
0.8
仕様・性能
形式
wドライバ
プログラムコントローラ
CTN480G
±0.5
注
(1) 最大推力の持続時間は最大1秒です。
(2) 周囲温度20℃、金属製の相手部材に取り付けた場合です。
にご相談ください。
(3) 表示の速度を超える場合については、
表2.2
SA120DE/1X
25.0
03.5
10.0
02.4
329
アライメントステージ ダイレクトドライブ形
■ドライバ仕様
SA65DE/X
表4 ドライバ仕様
65
形式
3
TDL1−1600(1)
項目
59
7.5
50
パルス列入力運転、RS232C通信運転
位置決め指令方式
X軸
ラインドライバ入力
主電源
4-M3深4(テーブル)
AC90〜110V 50/60Hz
主電源瞬間最大電流
4A
制御電源
―――
PWMキャリア周波数
40kHz
1.5(1)
1.5(1)
5(1)
パラメータ項目(不揮発メモリ) 電流値、分解能、制御モード、電子ギア、ゲイン、位置決め完了幅、電気原点、加速度フィルタ等
OFF
OFF
2チャンネル(現在速度、出力電流)
アナログモニタ
質 量
1.2kg
周囲温度
2.5(1)
1.5(1)
59
4-M3用キリ穴
メカストッパ
原点
原点前
SA…DE アライメントステージ ダイレクトドライブ形
LED 7セグメント 出力電流/パラメータ/エラーコード等
データ表示
3
59
3
4キー(桁選択、増、データ/パラメータ、書き込み)
パラメータキー
3
サーボレディ、位置決め完了、アラームコード0、アラームコード1、アラームコード2
電流フィードバック、オーバヒート(モータ、ドライバ)、推力制御、サーボオフ、+方向移動禁止、−方向移動禁止
8.5
出力制限
4-M2.5深4
原点位置、原点前位置、+方向リミット、−方向リミット
15
シーケンス出力
65
サーボオン、+方向移動禁止、−方向移動禁止、ゲインロー、リセット、運転
センサ出力
3.9
シーケンス入力
40
パルス入力方式:+方向/−方向、パルス/方向、A相/B相
59
最大パルス周波数:10MHz
(AB相時は2.5MHz)
パルス列入力
−方向リミット
有効ストローク長さ+3 OFF +方向リミット
X軸センサタイミング
0〜40℃
放熱フィン温度
70℃
max(過熱カット式)
注(1) 各数値は目安であり、保証値ではありません。詳細な寸法が必要な際は、
にお問い合わせください。
振動0.5G、衝撃5G 1回
振動、衝撃
SA65DE/S
寸法
<TDL1-1600>
φ10
6
φ5
CCW
θ軸
CW
8-M3深4
(等分配置)
9
59
3
3
4-M3用キリ穴
65
にお問い合わせください。
6
注
(1) 小形のTDL-1601もご用意しております。詳細については
122
125
3
5
6
51 21
72
22
(5)
φ18
(76.5)
160
180
171
φ5
CW
5°
(1)
CCW
5°
(1)
メカストッパ
原点
4°
(1)
電装システム
OFF 原点前
11°
()
CWリミット
OFF
有効動作角度+10° OFF CCWリミット
1
θ軸センサタイミング
1
注( ) 各数値は目安であり、保証値ではありません。詳細な寸法が必要な際は、
330
にお問い合わせください。
331
アライメントステージ ダイレクトドライブ形
SA65DE/XY
アライメントステージ ダイレクトドライブ形
SA65DE/XYS
φ10深20
θ軸
CW
X軸
9
φ5
X軸
(76.5)
40
59
65
4-M2.5深4
4-M3深4
(等分配置)
65
CCW
8.5
3
φ18
50
59
65
4-M3深4
(等分配置)
22
Y軸
15
Y軸
4-M3用キリ穴
59
3
3
59
3.9
3
59
3.9
59
SA…DE アライメントステージ ダイレクトドライブ形
3
15
52
15 15
30
4-M3深4(テーブル)
7.5
3
4-M3用キリ穴
SA65DE/XS
4-M3深4
(等分配置)
4-M3深4
φ10深20 θ軸
(等分配置)
CCW
CW
9
(76.5)
φ5
φ1
8
X軸
59
3
59
電装システム
3
3.9
15
22
37
65
4-M3用キリ穴
332
333
アライメントステージ ダイレクトドライブ形
アライメントステージ ダイレクトドライブ形
SA120DE/XY
SA120DE/X
120
8-M4深6
X軸
X軸
100
100
110
120
110
100
8-M4深6
110
120
110
5
2(1)
4-M4用キリ穴
メカストッパ
原点
5
110
原点前
OFF
12(1)
5
110
SA…DE アライメントステージ ダイレクトドライブ形
3(1)
110
25 25
5
5
2(1)
OFF
5
25
Y軸
100
110
120
4-M4用キリ穴
−方向リミット
有効ストローク長さ+4 OFF +方向リミット
X軸センサタイミング
注
(1) 各数値は目安であり、保証値ではありません。詳細な寸法が必要な際は、
にお問い合わせください。
SA120DE/S
SA120DE/XS
16
88
4-M4用さぐり穴
20
φ1
88
135
100
φ9
0
20
CCW
100
10
φ1
φ36
25
θ軸
120
10
CW
φ9
0
8-M4深8
(等分配置)
5
8-M4深8
(等分配置)
16
θ軸
CCW
CW
10
100
135
φ36
X軸
120
CCW
CW
3°
(1)
メカストッパ
3°
(1)
3°
(1)
原点
OFF 原点前
110
5
5
110
4-M4用キリ穴
電装システム
OFF
25 25
5
3°
(1)
CWリミット
有効動作角度+6° OFF CCWリミット
θ軸センサタイミング
注
(1) 各数値は目安であり、保証値ではありません。詳細な寸法が必要な際は、
334
にお問い合わせください。
335
アライメントステージ ダイレクトドライブ形
SA200DE/S
32
136
16
0
φ20
φ56
160
88
θ軸
CCW
CW
8-M5深10
(等分配置)
8-M4深8
(等分配置)
4-M6用さぐり穴
135
X軸
φ36
φ1
40
20
20
φ1
220
SA120DE/XYS
アライメントステージ ダイレクトドライブ形
CW
φ9
0
θ軸
160
CCW
20
200
5
25 25 25
5
5
CW
4°
(1)
CCW
メカストッパ
2°
(1)
5
110
4-M4用キリ穴
SA…DE アライメントステージ ダイレクトドライブ形
110
4°
(1)
30
Y軸
120
原点
OFF 原点前
4°
(1)
OFF
CWリミット
有効動作角度 OFF CCWリミット
θ軸センサタイミング
注(1) 各数値は目安であり、保証値ではありません。詳細な寸法が必要な際は、
にお問い合わせください。
エンコーダインターフェイス
41
20
4.5
142
127
100
コネクタ
1.2
19.2
2.9
16.2
固定用ブラケット
(添付されています)
六角穴付きボタンボルトM4推奨
(添付されません)
電装システム
336
337
TZ 精密昇降テーブル
電装システム
339
338
呼び番号
諸特性・センサ仕様
表1 諸特性
呼び番号の配列例
ボールねじの
リード
mm
項目
減速比
TZ
120
–
2
A
/
V006
●
1 形式
●
呼び番号
TZ120−2
TZ120−4
TZ200−2
TZ200−4
1:2
分解能(1)
μm/pulse
1:2
耐荷重(2)
mm
kg
10
1.00
20
05
±0.001
2.50
5
1:4
ストローク長さ
2.00
4
1:4
繰返し
位置決め精度
mm
24
1.25
40
12
注(1) モータの分割数が1000pulse/revのときの値を示します。
(2) 機能上、性能上支障なく使用することができる最大質量です。精度が保証できる荷重はこの値の約1/2になります。
●
2 大きさ
●
表2 テーブルイナーシャと起動トルク
●
3 くさび
●
項目
呼び番号
テーブルイナーシャ J T
×10−5kg・m2
起動トルク T 0
N・m
0.076
0.03
0.061
0.02
0.502
0.07
0.417
0.06
TZ120−2
TZ120−4
TZ200−2
TZ200−4
●
4 モータの有無
●
●
5 モータの種類
●
表3 センサのタイミングチャート
CWリミット
OFF
CCWリミット
OFF
1:2
4:くさび減速比
1:4
上下方向位置
A
2:くさび減速比
B
ボールねじの送り量に対する上下方向の移動量の減速比を示します。
単位
●
4 モータの有無
●
無記号:モータなし
A
:モータ付き
お客様にてモータをご用意いただく場合には、モータなし(無記号)としてください。
●
5 モータの種類
●
A
呼び番号
TZ120−2
TZ120−4
TZ200−2
TZ200−4
B
C
mm
D
1
1
1
0.5
0.5
0.5
1
0.5
1.5
1
1
1
0.75
0.5
0.5
0.5
TZ 精密昇降テーブル
●
3 くさび
●
C
メカストッパ
CCW
120:スライドテーブルの大きさ □120mm
200:スライドテーブルの大きさ □200mm
CW
OFF
ストローク長さ
ON
原点前
Hmin
原点
ストローク長さ
●
2 大きさ
●
TZ:精密昇降テーブル
D
●
1 形式
●
ACサーボモータをご指定の場合は363ページをご参照ください。
ステッピングモータをご指定の場合は369ページをご参照ください。
電装システム
340
341
精密昇降テーブル
精密昇降テーブル
80
4-M5深7.5
LM
20
120
160
4-M6深12
23
144
200
80
120
(206)
TZ200
(126)
TZ120
L1
46
160
20
200
32
LM
L1
54
233
9
S
70
48
Hmax
16
4-M5用穴
52
(23)
Hmin
34
10
Hmin
Hmax
S
8
100
(23)
単位
呼び番号
1:2
1:4
高さ寸法
Hmin
Hmax
(CWリミット位置)(CCWリミット位置)
3.8
3.4
93.0
84.5
103.0
089.5
ストローク長さ
呼び番号
S
10
05
単位
モータ記号
ブレーキなし
ACサーボモータ
ブレーキ付き
TZ200−2
TZ200−4
ブレーキなし
ブレーキ付き
備考 V017以外はモータ端部に手動用ノブは付いていません。
342
くさび減速比
1:2
1:4
高さ寸法
Hmin
Hmax
(CWリミット位置)(CCWリミット位置)
12.4
11.8
146
132
170
144
モータ記号
LM
094.5
103
096.5
135
135
124.5
048.5
088.5
mm
ストローク長さ
S
24
12
Y027
P001
J001
Y032
P006
J006
V017
V006
LM
077
073
081.5
108.5
105
109.5
047
077
L1
−
−
−
−
−
−
63
−
mm
モータ部寸法
モータの種類
単位
ブレーキの有無
ブレーキなし
ACサーボモータ
ブレーキ付き
ステッピングモータ
備考
ブレーキなし
ブレーキ付き
Y028
P002
J002
Y033
P007
J007
V018
V008
mm
L1
−
−
−
−
−
−
72.5
−
電装システム
ステッピングモータ
単位
質量(1)
(参考)
kg
注(1) モータの質量は含まれていません。
モータ部寸法
ブレーキの有無
150
mm
注
(1) モータの質量は含まれていません。
モータの種類
4-M6用穴
57
TZ 精密昇降テーブル
TZ120−2
TZ120−4
くさび減速比
質量(1)
(参考)
kg
150
V018以外はモータ端部に手動用ノブは付いていません。
343
SPの特長
SP
ピエゾステージ SP は、ピエゾ素子と歪ゲージで構成される
1
ピエゾステージ
高分解能と高い位置決め精度
『10nm』の高い分解能と、高い位置決め精度を実現しました。
独自の変位検出機構を、コンパクト
な鋼製のステージ内に組み込んだ超微動ステージです。
ピエゾステージ SP は、『10nm』という高い分解能と高い位置決め精度を実現しており、
精密
位置決めテーブルと組み合わせることによって、高精度でコンパクトな粗動・微動機構を構成することが
できます。
レーザー・光学機器、半導体・液晶関連装置など、微細な位置決めが必要とされる制御機構として最適
です。
2
なめらかな微小送り動作
可動部の支持機構として平行ばねを採用することにより、ピエゾ素子への一定の予圧を与えること
ができ、摩擦のない安定した微小送り動作を実現しました。
3
パルス指令にも対応、多彩な機能を持つ専用ドライバ
一般的なアナログ電圧指令だけでなく、パルス指令、USB 通信コマンド指令にも対応した専用ド
ライバを用意しています。用途に合わせた最適な制御システムの構築が可能です。
4
粗動・微動システムの構成が可能
専用ブラケット(TAE0418-BR)を使用することにより、
精密位置決めテーブル TS55/55・
CT55/55T・CT55/55 の上に搭載することができ、コンパクトな粗動・微動機構を構成することが
できます。
SP ピエゾステージ
電装システム
ピエゾステージ SP の構造
344
345
呼び番号・諸特性
動作仕様
呼び番号の配列例
SP
55
/
55
/
DR
ピエゾステージSPは、専用ドライバにて下記のいずれかの方式で指令を与えることにより移動しま
す。
いずれの指令方式の場合もストローク範囲の10μmを越えるとリミット信号を出力してその場で停止
します。
①パルス指令
CW、CCWパルス指令により10nm/1パルスで移動します。また、原点復帰信号を与えることにより、
ストローク範囲(10μm)の中央に移動します。
②電圧指令
アナログ電圧指令により1μm/1Vで動作します。電圧指令時にはドライバフロントパネルのバイアス
調整つまみによりゼロ点をストローク範囲(10μm)でオフセットさせることができます。
③USB指令
USBポートからのコマンドにより10nm単位で移動します。
●
1 形式
●
●
2 大きさ
●
●
3 ステージ長さ
●
●
4 専用ドライバ付き
●
●
1 形式
●
SP:ピエゾステージ
●
2 大きさ
●
55:ステージ幅55mm
1000パルス
パルス指令時
10V
0V
電圧指令時
●
3 ステージ長さ
●
55:ステージ長さ55mm
1000
+
●
4 専用ドライバ付き
●
10μm
DR:専用ドライバ付き
ストローク
+方向リミット
−方向リミット
表1 諸特性
形 式
項 目
μm
nm
μm
μm
μm
N
kg
パルス制御時の
原点復帰位置
SP55/55/DR
歪ゲージ
10
10
0.1
±0.05
0.05
10
0.3
OFF
OFF
5μm
図1 動作仕様
SP ピエゾステージ
位置センサ
ストローク
分解能
位置決め精度
繰返し位置決め精度
ロストモーション
耐荷重
(1)
総質量
(2 )
0
USB指令時
-
注
(1) 機能上、性能上支障なく使用することができる最大荷重です。
(2) コードの質量は含んでいません。
電装システム
346
347
電装システム
■ドライバ仕様
■システム構成
ピエゾステージSPは専用ドライバにより駆動します。システム構成を図2及び表2に、専用ドライバの
仕様を表3に、専用ドライバの付属品を表4に示します。ご注文の際は表2に示す形式にて別途ご指定く
ださい。
15 30
2-φ5.2
TDP1-100
PWR
USB
パソコン
PIEZO
BIAS
TDP1-100
ALM
160
175
USBコード
185
w 専用ドライバ
●
PWR
ALM
USB制御の場合
DIP SW
q ピエゾステージ
●
パルス制御の場合
SP55/55/DR
e
●
USB
PIEZO
プログラムコントローラ ●
r ティーチングボックス
CTN480G
TAE10M5-TB
BIAS
FG
L
N
I/O
AC100V
Piezo Driver
DIP SW
y
●
AC100V
t
●
(10.3)
30
FG
L
N
電圧制御の場合
1
y
●
I/O
AC100V
Piezo Driver
アナログ出力ユニット
図2 システム構成
()
DC電源
24V
表3 専用ドライバの仕様
注
(1) DC24V電源は別途お客様でご用意ください。
備考 電圧制御及びUSB制御で使用するコードは、別途お客様にてご用意ください。
項目
表2 パルス制御の場合のシステム構成
q
w
e
r
t
y
形式
SP55/55/DR
CTN480G
TAE10M5-TB
TAE10V1-LD
お客様でご用意ください。
ピエゾステージSPと専用ドライバ間のコード長さは3mです。
パルス・リミットコードの長さは1.5mです。
動作指令仕様
電圧指令
USB指令
入力
入出力仕様
出力
アナログモニタ
主電源
最大消費電流
電源仕様
ピエゾ出力電圧
定格出力電流
使用周囲温度・湿度
質量(参考)
表4 専用ドライバの付属品
種類
形式
備考
電源コネクタ
DINレール取付部品
MSTB2.5/3-STF
DRT-1
フェニックスコンタクト㈱
㈱タカチ電機工業
SP ピエゾステージ
備考1.
2.
名称
ピエゾステージSP
専用ドライバ
プログラムコントローラ
ティーチングボックス
パルス・リミットコード
電源コード
仕様
歪ゲージセンサ
10μm
10nm
CW、CCWパルス方式(フォトカプラ入力)
−10V〜10V(1V=1μm)
(バイアス機能0〜10V)
USBポートからの通信コマンドによる
パルス制御時の原点復帰
アラーム、位置決め完了、+方向リミット、−方向リミット
現在位置または偏差
AC100V(±10%)、50/60Hz
0.5A
0〜150V
10mA
0〜50℃、20〜85%RH
(結露なきこと)
1.6kg
フィードバック
制御範囲
分解能
パルス指令
制御仕様
No.
115
5.2
60
電装システム
348
349
精密位置決めテーブルとの組合せ
ピエゾステージSPは、専用ブラケットを使用して
精密位置決めテーブルTS55/55・CT55/55T・CT55/55の
上に搭載することができ、コンパクトな粗動・微動を
構成することができます。
精密位置決めテーブルTS55/55・CT55/55T・CT55/55
の諸特性は、198ページをご参照ください。
ピエゾステージ
SP55/55/DR
ピエゾステージ
SP55/55/DR
ブラケット
TAE0418-BR
精密位置決めテーブル
TS55/55
コード長さ:3000
17
TS55/55との組合せ
16.5
55
6-M3深さ5
47
4
■TS55/55との組合せ寸法
44
36
47
55
35.5
6 17
精密位置決めテーブル ピエゾステージ
SP55/55/DR
TS55/55
ブラケット
TAE0418-BR
85
13
4-M3用ざぐり穴
15
15
38
5.5
4
4
55
55
58.5
4
8.5
●TAE0418-BR
55
17.5
4
47
47
12.5
30
4-φ3.5きり
6深ざぐり深3.5
SP ピエゾステージ
55
6
17.5
4
10
4-M3通し
材質:炭素鋼
電装システム
SP55/55/DR専用ブラケット
350
351
354
356
364
370
373
376
378
394
352
353
選定手順
選定手順
精密位置決めテーブル形式を選定します。
精密位置決めテーブル形式を選定します。
「テーブル形式とモータの組合せ一覧」
( 356ページ)より
ACサーボモータを選定します。
「テーブル形式とモータの組合せ一覧」
( 364ページ)より
ステッピングモータを選定します。
「ACサーボモータとドライバの組合せ一覧」
(370ページ)より選定したモータに合わせて
ドライバ・モータコード・エンコーダコードを選定します。
「テーブルと
コントローラの組合せ一覧」
( 376ページ)より
選定したモータに合わせたシステム構成を選定します。
「テーブルと
コントローラの組合せ一覧」
( 373ページ)より
テーブルに合わせたコントローラを選定します。
354
355
テーブル形式とモータの組合せ一覧
ACサーボモータ
■ACサーボモータ
ロングストロークシリーズ TSL…M
TUシリーズ TU
大きさ
TU 40
TU 50
TU 60
TU 86
TU100
TU130
TX
CTX
TC
大きさ
モータ記号
大きさ
TU 25
TU 30
TSLH…M
CTLH…M
TSL 120 M - 200 A / Y028 10
TU 86 FG 89 A / Y029 G 10 S 0 0 R Q
大きさ
TSL…M
呼び番号の配列例
呼び番号の配列例
ブレーキ付き
(1)
ブレーキなし
モータ記号
モータ形式
モータ記号
モータ形式
AL6
HL6
Y027
P001
J001
Y028
P002
J002
Y029
P003
J003
Y030
P004
J004
Y031
P005
J005
SGMM-A2C312
HC-AQ0235D
SGMAH-A5AAA21-E
MSMA5AZA1A
HC-KFS053
SGMAH-01AAA21-E
MSMA012A1A
HC-KFS13
SGMAH-02AAA21-E
MSMA022A1A
HC-KFS23
SGMAH-04AAA21-E
MSMA042A1A
HC-KFS43
SGMAH-08AAA21-E
MSMA082A1A
HC-KFS73
AL6B
HL6B
Y032
P006
J006
Y033
P007
J007
Y034
P008
J008
Y035
P009
J009
Y036
P010
J010
SGMM-A2C312C
HC-AQ0235BD
SGMAH-A5AAA2C-E
MSMA5AZA1B
HC-KFS053B
SGMAH-01AAA2C-E
MSMA012A1B
HC-KFS13B
SGMAH-02AAA2C-E
MSMA022A1B
HC-KFS23B
SGMAH-04AAA2C-E
MSMA042A1B
HC-KFS43B
SGMAH-08AAA2C-E
MSMA082A1B
HC-KFS73B
備考
㈱安川電機
三菱電機㈱
㈱安川電機
パナソニック㈱
三菱電機㈱
㈱安川電機
パナソニック㈱
三菱電機㈱
㈱安川電機
パナソニック㈱
三菱電機㈱
㈱安川電機
パナソニック㈱
三菱電機㈱
㈱安川電機
パナソニック㈱
三菱電機㈱
TU
TSL 90M
TSL120M
TSL170M
TSL170SM
TSL220M
モータ記号
ブレーキ付き
(1)
ブレーキなし
モータ記号
モータ形式
モータ記号
モータ形式
Y028
P002
J002
Y029
P003
J003
SGMAH-01AAA21-E
MSMA012A1A
HC-KFS13
SGMAH-02AAA21-E
MSMA022A1A
HC-KFS23
Y033
P007
J007
Y034
P008
J008
SGMAH-01AAA2C-E
MSMA012A1B
HC-KFS13B
SGMAH-02AAA2C-E
MSMA022A1B
HC-KFS23B
TM
TS
CT
備考
㈱安川電機
パナソニック㈱
三菱電機㈱
㈱安川電機
パナソニック㈱
三菱電機㈱
注(1) ブレーキ付きモータは別途、ブレーキ解除用電源が必要です。
TSLB
LT
LT…M
NT…V
NT
RT
注
(1) ブレーキ付きモータは別途、ブレーキ解除用電源が必要です。
AT
SA…M
AM
SA…DE
TZ
SP
電装システム
356
357
テーブル形式とモータの組合せ一覧
ACサーボモータ
高剛性シリーズ TSLH…M
高精密シリーズ TX
呼び番号の配列例
TSL…M
TSLH…M
CTLH…M
呼び番号の配列例
TSLH 220 M - 200 A / Y029 10 J R
TU
TX
CTX
TX 220 - 150 A / Y040 10
TC
モータ記号
大きさ
大きさ
TSLH120M
TSLH220M
TSLH320M
TSLH420M
ブレーキ付き
(1)
ブレーキなし
モータ記号
モータ形式
モータ記号
モータ形式
Y028
P002
J002
Y029
P003
J003
Y030
P004
J004
SGMAH-01AAA21-E
MSMA012A1A
HC-KFS13
SGMAH-02AAA21-E
MSMA022A1A
HC-KFS23
SGMAH-04AAA21-E
MSMA042A1A
HC-KFS43
Y033
P007
J007
Y034
P008
J008
Y035
P009
J009
SGMAH-01AAA2C-E
MSMA012A1B
HC-KFS13B
SGMAH-02AAA2C-E
MSMA022A1B
HC-KFS23B
SGMAH-04AAA2C-E
MSMA042A1B
HC-KFS43B
大きさ
備考
大きさ
㈱安川電機
パナソニック㈱
三菱電機㈱
㈱安川電機
パナソニック㈱
三菱電機㈱
㈱安川電機
パナソニック㈱
三菱電機㈱
TX120
TX220
TX320
TX420
モータ記号
TM
ブレーキ付き
(1)
ブレーキなし
モータ記号
モータ形式
モータ記号
モータ形式
Y039
Y040
Y041
Y042
SGMAS-02ACA21-E
SGMAS-04ACA21-E
SGMAS-06ACA21-E
SGMAS-08ACA21-E
Y043
Y044
Y045
Y046
SGMAS-02ACA2C-E
SGMAS-04ACA2C-E
SGMAS-06ACA2C-E
SGMAS-08ACA2C-E
TS
CT
備考
㈱安川電機
注(1) ブレーキ付きモータは別途、ブレーキ解除用電源が必要です。
高精密シリーズ
TSLB
CTX
注
(1) ブレーキ付きモータは別途、ブレーキ解除用電源が必要です。
呼び番号の配列例
高剛性シリーズ CTLH…M
LT
CTX 120 - 30 20 A / Y039 5 C
LT…M
呼び番号の配列例
大きさ
CTLH 220 M - 30 20 A / Y029 5 J R C
大きさ
大きさ
CTX120
CTX220
モータ記号
モータ記号
ブレーキ付き
(1)
ブレーキなし
モータ記号
モータ形式
モータ記号
モータ形式
Y039
Y040
SGMAS-02ACA21-E
SGMAS-04ACA21-E
Y043
Y044
SGMAS-02ACA2C-E
SGMAS-04ACA2C-E
NT…V
NT
RT
備考
㈱安川電機
AT
1
大きさ
CTLH120M
CTLH220M
CTLH320M
ブレーキ付き
(1)
ブレーキなし
モータ記号
モータ形式
モータ記号
モータ形式
Y028
P002
J002
Y029
P003
J003
SGMAH-01AAA21-E
MSMA012A1A
HC-KFS13
SGMAH-02AAA21-E
MSMA022A1A
HC-KFS23
Y033
P007
J007
Y034
P008
J008
SGMAH-01AAA2C-E
MSMA012A1B
HC-KFS13B
SGMAH-02AAA2C-E
MSMA022A1B
HC-KFS23B
備考
注( ) ブレーキ付きモータは別途、ブレーキ解除用電源が必要です。
備考 ブレーキ付きテーブルは、Y軸だけがブレーキ付きモータになります。
例 Y043を選択した場合はX軸にY039、Y軸にY043が組合わされます。
SA…M
AM
㈱安川電機
パナソニック㈱
三菱電機㈱
㈱安川電機
パナソニック㈱
三菱電機㈱
SA…DE
TZ
SP
358
電装システム
注
(1) ブレーキ付きモータは別途、ブレーキ解除用電源が必要です。
備考 ブレーキ付きテーブルは、Y軸だけがブレーキ付きモータになります。
例 Y033を選択した場合はX軸にY028、Y軸にY033が組合わされます。
359
テーブル形式とモータの組合せ一覧
ACサーボモータ
クリーンテーブルシリーズ TC
コンパクトシリーズ TS
呼び番号の配列例
TSL…M
TSLH…M
CTLH…M
呼び番号の配列例
TC 60 U 590 A / Y028 G 20 2 R Q
TU
TX
CTX
TS 125/125 A / Y028 5 SC
TC
大きさ
大きさ
TC 30US
TC 40US
TC 50US
TC 60US
TC 60U
TC 86U
モータ記号
大きさ
ブレーキ付き
(1)
ブレーキなし
モータ記号
モータ形式
モータ記号
モータ形式
AL6
Y027
P001
J001
Y028
P002
J002
Y029
P003
J003
SGMM-A2C312
SGMAH-A5AAA21-E
MSMA5AZA1A
HC-KFS053
SGMAH-01AAA21-E
MSMA012A1A
HC-KFS13
SGMAH-02AAA21-E
MSMA022A1A
HC-KFS23
AL6B
Y032
P006
J006
Y033
P007
J007
Y034
P008
J008
SGMM-A2C312C
SGMAH-A5AAA2C-E
MSMA5AZA1B
HC-KFS053B
SGMAH-01AAA2C-E
MSMA012A1B
HC-KFS13B
SGMAH-02AAA2C-E
MSMA022A1B
HC-KFS23B
備考
大きさ
㈱安川電機
㈱安川電機
パナソニック㈱
三菱電機㈱
㈱安川電機
パナソニック㈱
三菱電機㈱
㈱安川電機
パナソニック㈱
三菱電機㈱
TS125/125
TS125/220
TS220/220
TS220/310
注
(1) ブレーキ付きモータは別途、ブレーキ解除用電源が必要です。
TS260/350
モータ記号
TM
ブレーキ付き
(1)
ブレーキなし
TS
CT
備考
モータ記号
モータ形式
モータ記号
モータ形式
Y028
SGMAH-01AAA21-E
Y033
SGMAH-01AAA2C-E
㈱安川電機
P002
MSMA012A1A
P007
MSMA012A1B
パナソニック㈱
J002
HC-KFS13
J007
HC-KFS13B
三菱電機㈱
Y029
P003
J003
SGMAH-02AAA21-E
MSMA022A1A
HC-KFS23
Y034
P008
J008
SGMAH-02AAA2C-E
MSMA022A1B
HC-KFS23B
㈱安川電機
パナソニック㈱
三菱電機㈱
注(1) ブレーキ付きモータは別途、ブレーキ解除用電源が必要です。
TSLB
コンパクトシリーズ CT
LT
呼び番号の配列例
マイクロテーブルシリーズ TM
LT…M
CT 125/125 A / Y028 5 SC
呼び番号の配列例
TM 15 - 20 A / T001 05 1
大きさ
大きさ
TM15
モータ記号
T001
モータ形式
TS4861N4020E500
大きさ
ブレーキ付き
(1)
ブレーキなし
モータ記号
大きさ
モータ記号
モータ形式
−
−
備考
多摩川精機㈱
CT125/125
CT220/220
CT260/350
CT350/350
NT…V
NT
モータ記号
RT
ブレーキ付き
(1)
ブレーキなし
モータ記号
モータ形式
モータ記号
モータ形式
Y028
P002
J002
Y029
P003
J003
SGMAH-01AAA21-E
MSMA012A1A
HC-KFS13
SGMAH-02AAA21-E
MSMA022A1A
HC-KFS23
Y033
P007
J007
Y034
P008
J008
SGMAH-01AAA2C-E
MSMA012A1B
HC-KFS13B
SGMAH-02AAA2C-E
MSMA022A1B
HC-KFS23B
AT
備考
㈱安川電機
パナソニック㈱
三菱電機㈱
㈱安川電機
パナソニック㈱
三菱電機㈱
注(1) ブレーキ付きモータは別途、ブレーキ解除用電源が必要です。
備考 ブレーキ付きテーブルは、Y軸だけがブレーキ付きモータになります。
例 Y033を選択した場合はX軸にY028、Y軸にY033が組合わされます。
SA…DE
TZ
SP
電装システム
360
SA…M
AM
361
テーブル形式とモータの組合せ一覧
ACサーボモータ
精密アライメントテーブル AT
アライメントモジュール
呼び番号の配列例
AM
TSL…M
TSLH…M
CTLH…M
呼び番号の配列例
AT 120 A / Y027
TU
TX
CTX
AM 40 - 30 A / Y027 G 4 A
TC
大きさ
大きさ
AT120A
AT200A
AT300A
モータ記号
ブレーキなし
大きさ
ブレーキ付き
モータ記号
モータ形式
モータ記号
モータ形式
Y027
P001
J001
Y028
P002
J002
SGMAH-A5AAA21-E
MSMA5AZA1A
HC-KFS053
SGMAH-01AAA21-E
MSMA012A1A
HC-KFS13
−
−
−
−
−
−
−
−
−
−
−
−
備考
㈱安川電機
パナソニック㈱
三菱電機㈱
㈱安川電機
パナソニック㈱
三菱電機㈱
大きさ
AM25
AM40
AM60
アライメントステージ モジュール形 SA…M
AM86
モータ記号
ブレーキなし
TM
ブレーキ付き
モータ記号
モータ形式
モータ記号
モータ形式
AL6
HL6
Y027
P001
J001
Y028
P002
J002
Y029
P003
J003
SGMM-A2C312
HC-AQ0235D
SGMAH-A5AAA21-E
MSMA5AZA1A
HC-KFS053
SGMAH-01AAA21-E
MSMA012A1A
HC-KFS13
SGMAH-02AAA21-E
MSMA022A1A
HC-KFS23
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
TS
CT
備考
㈱安川電機
三菱電機㈱
㈱安川電機
パナソニック㈱
三菱電機㈱
㈱安川電機
パナソニック㈱
三菱電機㈱
㈱安川電機
パナソニック㈱
三菱電機㈱
呼び番号の配列例
LT
精密昇降テーブル TZ
SA 420 M 4 A / Y027 G 4
大きさ
大きさ
SA250M
SA420M
SA800M
ブレーキなし
LT…M
呼び番号の配列例
モータ記号
ブレーキ付き
モータ記号
モータ形式
モータ記号
モータ形式
AL6
HL6
Y027
P001
J001
Y028
P002
J002
SGMM-A2C312
HC-AQ0235D
SGMAH-A5AAA21-E
MSMA5AZA1A
HC-KFS053
SGMAH-01AAA21-E
MSMA012A1A
HC-KFS13
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
−
NT…V
NT
TZ 120 - 2 A / Y027
RT
備考
㈱安川電機
三菱電機㈱
㈱安川電機
パナソニック㈱
三菱電機㈱
㈱安川電機
パナソニック㈱
三菱電機㈱
AT
大きさ
モータ記号
SA…M
AM
大きさ
TZ120
TZ200
ブレーキ付き
(1)
ブレーキなし
モータ形式
モータ記号
モータ形式
Y027
P001
J001
Y028
P002
J002
SGMAH-A5AAA21-E
MSMA5AZA1A
HC-KFS053
SGMAH-01AAA21-E
MSMA012A1A
HC-KFS13
Y032
P006
J006
Y033
P007
J007
SGMAH-A5AAA2C-E
MSMA5AZA1B
HC-KFS053B
SGMAH-01AAA2C-E
MSMA012A1B
HC-KFS13B
備考
SA…DE
㈱安川電機
パナソニック㈱
三菱電機㈱
㈱安川電機
パナソニック㈱
三菱電機㈱
363
TZ
SP
電装システム
モータ記号
注(1) ブレーキ付きモータは別途、ブレーキ解除用電源が必要です。
362
TSLB
テーブル形式とモータの組合せ一覧
ステッピングモータ
■ステッピングモータ
高剛性シリーズ TSLH…M
TUシリーズ TU
大きさ
大きさ
モータ記号
ブレーキなし
モータ記号
モータ形式
ブレーキ付き
モータ記号
モータ形式
V004
PK523PA
−
−
V005
PK545AW
V006
PK545AWM
V011
PK569AE
V012
PK569AEM
備考
TSLH120M
TSLH220M
TSLH320M
PK599AE
ブレーキなし
ブレーキ付き
モータ記号
モータ形式
モータ記号
モータ形式
V011
PK569AE
V012
PK569AEM
V013
PK596AE
V014
PK596AEM
TM
TS
CT
備考
オリエンタルモーター㈱
TSLB
呼び番号の配列例
PK599AEM
V016
モータ記号
高剛性シリーズ CTLH…M
オリエンタルモーター㈱
V015
TX
CTX
TC
大きさ
TU 25
TU 30
TU 40
TU 50
TU 60
TU 86
TU100
TU130
TSLH…M
CTLH…M
TSLH 220 M - 200 A / V013 10 J R
TU 86 FG 89 A / V011 G 10 S 0 0 R Q
大きさ
TSL…M
呼び番号の配列例
呼び番号の配列例
TU
CTLH 220 M - 30 20 A / V013 5 J R C
LT
ロングストロークシリーズ TSL…M
大きさ
モータ記号
LT…M
呼び番号の配列例
大きさ
TSL 120 M - 200 A / V009 10
大きさ
大きさ
TSL 90M
TSL120M
TSL170M
TSL170SM
TSL220M
CTLH120M
CTLH220M
CTLH320M
モータ記号
ブレーキなし
ブレーキ付き
モータ記号
モータ形式
モータ記号
モータ形式
V009
PK566AE
V010
PK566AEM
備考
ブレーキなし
ブレーキ付き
モータ記号
モータ形式
モータ記号
モータ形式
V011
PK569AE
V012
PK569AEM
V013
PK596AE
V014
PK596AEM
NT…V
NT
備考
RT
オリエンタルモーター㈱
AT
ブレーキ付きテーブルは、Y軸だけがブレーキ付きモータになります。
例 V014を選択した場合はX軸にV013、Y軸にV014が組合わされます。
SA…M
AM
備考
SA…DE
TZ
オリエンタルモーター㈱
V013
PK596AE
V014
PK596AEM
SP
電装システム
364
365
テーブル形式とモータの組合せ一覧
ステッピングモータ
クリーンテーブルシリーズ TC
コンパクトシリーズ TS
呼び番号の配列例
TSL…M
TSLH…M
CTLH…M
呼び番号の配列例
TC 60 U 590 A / V011 G 20 2 R Q
TU
TX
CTX
TS 125/125 A / V007 5 SC
TC
大きさ
大きさ
TC40US
TC50US
TC60US
TC60U
TC86U
モータ記号
ブレーキなし
モータ記号
V005
モータ形式
PK545AW
大きさ
ブレーキ付き
モータ記号
モータ形式
V006
PK545AWM
備考
オリエンタルモーター㈱
V011
PK569AE
PK569AEM
V012
大きさ
TS 55/ 55
TS 75/ 75
TS125/125
TS125/220
TS220/220
TS220/310
TS260/350
モータ記号
ブレーキなし
モータ記号
TM
ブレーキ付き
モータ形式
モータ記号
モータ形式
S2
PX535MH-A
−
−
V007
PK564AE
V008
PK564AEM
V009
PK566AE
V010
PK566AEM
V013
PK596AE
V014
PK596AEM
TS
CT
備考
オリエンタルモーター㈱
TSLB
マイクロテーブルシリーズ TM
コンパクトシリーズ CT
呼び番号の配列例
LT
呼び番号の配列例
TM 15 - 20 A / T002 05 1
大きさ
LT…M
CT 125/125 A / V007 5 SC
NT…V
NT
モータ記号
大きさ
モータ記号
RT
大きさ
TM15
1
ブレーキ付き
()
ブレーキなし
モータ記号
モータ形式
モータ記号
モータ形式
T002
T003
TS3682N2
TS3692N2
−
−
−
−
備考
大きさ
多摩川精機㈱
CT 55/ 55T
CT 55/ 55
CT 75/ 75
CT125/125
CT220/220
CT260/350
CT350/350
備考
ブレーキなし
モータ記号
モータ形式
ブレーキ付き
モータ記号
モータ形式
V001
PK513PA
−
−
S2
PX535MH-A
−
−
V007
V009
PK564AE
PK566AE
V008
V010
PK564AEM
PK566AEM
V013
PK596AE
V014
PK596AEM
備考
AT
SA…M
AM
オリエンタルモーター㈱
SA…DE
TZ
ブレーキ付きテーブルは、Y軸だけがブレーキ付きモータになります。
例 V010を選択した場合はX軸にV009、Y軸にV010が組合わされます。
SP
電装システム
366
367
テーブル形式とモータの組合せ一覧
ステッピングモータ
高速ロングストロークシリーズ TSLB
精密アライメントテーブル AT
呼び番号の配列例
TSL…M
TSLH…M
CTLH…M
呼び番号の配列例
TSLB 120 - 700 A / V011
TU
TX
CTX
AT 120 A / V005
TC
大きさ
大きさ
TSLB 90
TSLB120
TSLB170
モータ記号
ブレーキなし
ブレーキ付き
モータ記号
モータ形式
モータ記号
モータ形式
V011
PK569AE
−
−
V013
PK596AE
−
−
大きさ
備考
大きさ
オリエンタルモーター㈱
AT120
AT200
AT300
モータ記号
ブレーキなし
TM
ブレーキ付き
モータ記号
モータ形式
モータ記号
モータ形式
V005
PK545AW
−
−
V009
PK566AE
−
−
TS
CT
備考
オリエンタルモーター㈱
TSLB
精密昇降テーブル
TZ
呼び番号の配列例
LT
TZ 120 -2 A / V006
大きさ
大きさ
TZ120
TZ200
LT…M
NT…V
NT
モータ記号
ブレーキなし
ブレーキ付き
モータ記号
モータ形式
モータ記号
モータ形式
V017
V018
PK545BW
PK564BE
V006
V008
PK545AWM
PK564AEM
RT
備考
AT
オリエンタルモーター㈱
SA…M
AM
SA…DE
TZ
SP
電装システム
368
369
ACサーボモータとドライバの組合せ一覧
TU
■㈱安川電機製モータと組み合わせるドライバ・モータコード・エンコーダコード
■パナソニック㈱製モータと組み合わせるドライバ・モータコード・エンコーダコード
TSL…M
TU、TSL…M、TSLH…M、CTLH…M、TC…US、TC…U、TS、CT、AT、SA…M、AM、TZとの組合せ
モータ記号
モータコード
エンコーダコード
モータ記号
ドライバ
SGDF-A2CP
TAE20J6-AM□□
(TAE20J5-AM□□)
最大長さ5mまで
TAE20J8-AMB□□
(TAE20J7-AMB□□)
最大長さ5mまで
TAE20K0-EC□□
(TAE20J9-EC□□)
最大長さ5mまで
TAE20K0-EC□□
(TAE20J9-EC□□)
最大長さ5mまで
P001
P002
P003
P004
P005
P006
P007
P008
P009
P010
MSDA5A5A1A
MSDA015A1A
MSDA023A1A
MSDA043A1A
MSDA083A1A
MSDA5A5A1A
MSDA015A1A
MSDA023A1A
MSDA043A1A
MSDA083A1A
AL6
AL6B
Y027
Y028
Y029
Y030
Y031
Y032
Y033
Y034
Y035
Y036
TU、TSL…M、TSLH…M、CTLH…M、TC…US、TC…U、TS、CT、AT、SA…M、AM、TZとの組合せ
ドライバ
SGDH-A5AE-E
SGDH-01AE-E
SGDH-02AE-E
SGDH-04AE-E
SGDH-08AE-E
SGDH-A5AE-E
SGDH-01AE-E
SGDH-02AE-E
SGDH-04AE-E
SGDH-08AE-E
TAE20G2-AM□□
(TAE20G1-AM□□)
TAE20G6-EC□□
(TAE20G5-EC□□)
TAE20G4-AMB□□
(TAE20G3-AMB□□)
モータコード
エンコーダコード
TSLH…M
CTLH…M
TX
CTX
TAE20G8-AM□□
(TAE20G7-AM□□)
TC
TAE20H2-EC□□
(TAE20H1-EC□□)
TAE20H0-AMB□□
(TAE20G9-AMB□□)
TM
TS
CT
備考1. ( )内は耐屈曲性に優れたコードです。
2. モータ・エンコーダコード長さは形式末尾の□□にて、最大20mまで1m単位で指定します。
※コード長さが10m未満の場合も2桁で指定します。
備考1. ( )内は耐屈曲性に優れたコードです。
2. モータ・エンコーダコード長さは形式末尾の□□にて、最大20mまで1m単位で指定します。
※コード長さが10m未満の場合も2桁で指定します。
TSLB
LT
LT…M
NT…V
NT
RT
AT
SA…M
AM
SA…DE
TZ
SP
電装システム
370
371
ACサーボモータとドライバの組合せ一覧
テーブルと
■三菱電機㈱製モータと組み合わせるドライバ・モータコード・エンコーダコード
■ACサーボモータ
コントローラの組合せ一覧
TU
TSL…M
㈱安川電機製システムを使用する場合の組合せ
TU、TSL…M、TSLH…M、CTLH…M、TC…US、TC…U、TS、CT、AT、SA…M、AM、TZとの組合せ
モータ記号
ドライバ
HL6
MR-J2-03A5
HL6B
J001
J002
J003
J004
J005
J006
J007
J008
J009
J010
モータコード
エンコーダコード
TAE20K2-AME□□
(TAE20K1-AME□□)
TAE20K4-AMBE□□
(TAE20K3-AMBE□□)
MR-J2S-10A
MR-J2S-20A
MR-J2S-40A
MR-J2S-70A
TAE20H4-AM□□
(TAE20H3-AM□□)
TAE20H8-EC□□
(TAE20H7-EC□□)
MR-J2S-10A
MR-J2S-20A
MR-J2S-40A
MR-J2S-70A
TAE20H6-AMB□□
(TAE20H5-AMB□□)
備考1. ( )内は耐屈曲性に優れたコードです。
2. モータ・エンコーダコード長さは形式末尾の□□にて、最大20mまで1m単位で指定します。
※コード長さが10m未満の場合も2桁で指定します。
区分
適用形式
TU
(大きさ25、
30を除く)
TSL…M
TSLH…M
TC…US
(大きさ30を除く)
TC…U
TS
1軸
AT
AM
(大きさ25を除く)
TZ
TU25
TU30
TC30US
AM25
TU
(大きさ25、
30を除く)
TSL…M
(2軸組合せ)
CTLH…M
TU25
2軸 TU30
TC30US
コントローラ
ティーチング
ボックス
備考1.
2.
2.
3.
4.
TX
CTX
TM
TAE10M7-LD□□
(TAE10M8-LD□□)
CTN480G
TS
CT
TAE10M5-TB
TAE10P3-LD□□
(TAE10P4-LD□□)
TSLB
TAE10M7-LD□□
(TAE10M8-LD□□)
2本
CTN480G
TAE10M5-TB
SA250M
CTN480G
SA420M
SA800M
パルス・リミットコード
TC
CT
3軸
TSLH…M
CTLH…M
TAE10M5-TB
TAE10P3-LD□□
(TAE10P4-LD□□)
2本
TAE10M7-LD□□
(TAE10M8-LD□□)
2本
+
TAE10R3-LCY
TAE10P3-LD□□
(TAE10P4-LD□□)
3本
TAE10M7-LD□□
(TAE10M8-LD□□)
3本
( )内は耐屈曲性に優れたコードです。
パルス・リミットコードの長さは、形式末尾の□□にて、最大20mまで1m単位で指定します。
※コード長さが10m未満の場合も2桁で指定します。
パルス・リミットのパルスコードの長さは、1.5mです。
SA…Mで4軸駆動ステージをご検討の際は、画像処理位置決めコントローラの使用を推奨します。システム構成に関す
る詳細については、
にお問い合わせください。
LT
LT…M
NT…V
NT
RT
AT
SA…M
AM
SA…DE
TZ
SP
電装システム
372
373
テーブルと
コントローラの組合せ一覧
TU
パナソニック㈱製システムを使用する場合の組合わせ
区分
適用形式
TU
TSL…M
TSLH…M
TC…US
1軸 TC…U
TS
AT
AM
TZ
TU
TSL…M
(2軸組合せ)
CTLH…M
2軸
コントローラ
CTN480G
ティーチング
ボックス
TAE10M5-TB
TAE10M5-TB
CT
3軸
備考1.
2.
2.
3.
SA…M
パルス・リミットコード
TAE10M9-LD□□
(TAE10P0-LD□□)
TAE10M9-LD□□
(TAE10P0-LD□□)
2本
CTN480G
CTN480G
TSL…M
三菱電機㈱製システムを使用する場合の組合わせ
TAE10M5-TB
TAE10M9-LD□□
(TAE10P0-LD□□)
2本
+
TAE10R3-LCY
TAE10M9-LD□□
(TAE10P0-LD□□)
3本
区分
適用形式
TU
(大きさ25、
30を除く)
TSL…M
TSLH…M
TC…US
TC…U
TS
1軸
AT
AM
(大きさ25を除く)
TZ
TU25
TU30
AM25
TU
(大きさ25、
30を除く)
TSL…M
(2軸組合せ)
CTLH…M
2軸
( )内は耐屈曲性に優れたコードです。
パルス・リミットコードの長さは、形式末尾の□□にて、最大20mまで1m単位で指定します。
※コード長さが10m未満の場合も2桁で指定します。
パルス・リミットのパルスコードの長さは、1.5mです。
TU25
TU30
コントローラ
ティーチング
ボックス
備考1.
2.
2.
3.
4.
TX
CTX
TAE10P1-LD□□
(TAE10P2-LD□□)
CTN480G
TAE10M5-TB
TM
TS
CT
TAE10P5-LD□□
(TAE10P6-LD□□)
TAE10P1-LD□□
(TAE10P2-LD□□)
2本
CTN480G
TAE10M5-TB
SA250M
CTN480G
SA420M
SA800M
パルス・リミットコード
TC
CT
3軸
TSLH…M
CTLH…M
TAE10M5-TB
TAE10P5-LD□□
(TAE10P6-LD□□)
2本
TAE10P1-LD□□
(TAE10P2-LD□□)
2本
+
TAE10R3-LCY
TAE10P5-LD□□
(TAE10P6-LD□□)
3本
TAE10P1-LD□□
(TAE10P2-LD□□)
3本
( )内は耐屈曲性に優れたコードです。
パルス・リミットコードの長さは、形式末尾の□□にて、最大20mまで1m単位で指定します。
※コード長さが10m未満の場合も2桁で指定します。
パルス・リミットのパルスコードの長さは、1.5mです。
SA…Mで4軸駆動ステージをご検討の際は、画像処理位置決めコントローラの使用を推奨します。システム構成に関す
る詳細については、
にお問い合わせください。
TSLB
LT
LT…M
NT…V
NT
RT
AT
SA…M
AM
SA…DE
TZ
SP
電装システム
374
375
テーブルと
コントローラの組合せ一覧
TU
■ステッピングモータ
CTLH…Mとの組合せ
TU
(1)、TSL…M、TSLH…M、TC
(2)
、TS、TSLB、AT、TZとの組合せ
モータ記号
S2
V005
V017
V007
V009
V011
V018
V013
V015
V006
V008
V010
V012
V014
V016
1
注
()
(2)
(3)
(3)
(4)
(4)
(5)
(5)
(5)
備考1.
2.
ドライバ
本体
モータコード
CRD5107P
(0)TAE20S3-SM□□(3)
(TAE20S4-SN□□)
プログラムコントローラ
本体
ティーチングボックス
パルス・リミットコード
(0)TAE10S1-LD□□
(5)
(TAE10S2-LD□□)
(0)TAE20R8-SM□□(4)
(TAE20R9-SN□□)
V014
CTN480G
TAE10M5-TB
RKD514H-A
(5)
(0)TAE10S3-LD□□
(TAE10S4-LD□□)
RKD507M-A
TAE20S1-SMB□□
(4)
RKD514LM-A (0)
(TAE20S2-SNB□□)
1
注
()
(1)
(2)
(2)
(2)
備考
本体
モータコード
TSL…M
プログラムコントローラ
本体
RKD514L-A
TAE20R8-SM□□(1)
(0)
2台
(TAE20R9-SN□□)
RKD514H-A
2本
2台
RKD514L-A
TAE20R8-SM□□(1) CTN480G
(0)
RKD514LM-A
(TAE20R9-SN□□)
各1台
+
RKD514H-A
TAE20S1-SMB□□
(1)
(0)
RKD514HM-A
(TAE20S2-SNB□□)
各1台
ティーチングボックス
パルス・リミットコード
TSLH…M
CTLH…M
TX
CTX
TAE10M5-TB
(0)
TAE10S3-LD□□(2)
(TAE10S4-LD□□)
2本
TC
TM
TS
CT
1
注( ) モータコード長さは、形式末尾の□□にて、最大10mまで1m単位で指定します。
(1) (3mの場合の例:TAE20R8-SM03)
(2) パルス・リミットコード長さは、形式末尾の□□にて、最大20mまで1m単位で指定します。
(2) (3mの場合の例:TAE10S3-LD03)
(3) 尚、パルスコード長さは、1.5mです。
備考 ( )内は耐屈曲性に優れたコードです。
RKD514HM-A
ドライバ
本体
CRD5103P
CTとの組合せ
モータ記号
モータコード
プログラムコントローラ
本体
(0)TAE20R6-SM□□(1)
CTN480G
(TAE20R7-SN□□)
ティーチングボックス
パルス・リミットコード
TAE10M5-TB
(0)TAE10S1-LD□□
(2 )
(TAE10S2-LD□□)
モータコード長さは、形式末尾の□□にて、最大5mまで1m単位で指定します。
(3mの場合の例:TAE20R6-SM03)
パルス・リミットコード長さは、形式末尾の□□にて、最大20mまで1m単位で指定します。
(3mの場合の例:TAE10S1-LD03)
尚、パルスコード長さは、1.5mです。
( )内は耐屈曲性に優れたコードです。
ドライバ
本体
V001
CRD5103P
2台
S2
CRD5107P
2台
V007
V009
V013
TU25、TU30との組合せ
V004
V013
V012
TU25、TU30には適用しません。下表を参照ください。
TC30USには適用しません。下表を参照ください。
モータコード長さは、形式末尾の□□にて、最大5mまで1m単位で指定します。
(3mの場合の例:TAE20S3-SM03)
モータコード長さは、形式末尾の□□にて、最大10mまで1m単位で指定します。
(3mの場合の例:TAE20R8-SM03)
パルス・リミットコード長さは、形式末尾の□□にて、最大20mまで1m単位で指定します。
(3mの場合の例:TAE10S3-LD03)
尚、パルスコード長さは、1.5mです。
( )内は耐屈曲性に優れたコードです。
モータコード及びリミットコードの標準長さは3mです。パルスコードの長さは1.5mです。
モータ記号
V011
RKD507A
RKD514L-A
ドライバ
モータ記号
V008
V010
V014
注(1)
(1)
(2)
(2)
(3)
(3)
(3)
備考
モータコード
プログラムコントローラ
本体
ティーチングボックス
TAE20R6-SM□□(1)
(0 )
(TAE20R7-SN□□)
2本
TAE20S3-SM□□(1)
(0)
(TAE20S4-SN□□)
2本
RKD514L-A
TAE20R8-SM□□(2)
(0)
2台
CTN480G
(TAE20R9-SN□□)
RKD514H-A
2本
2台
RKD514L-A
TAE20R8-SM□□(2)
(0)
RKD514LM-A
(TAE20R9-SN□□)
各1台
+
RKD514H-A
TAE20S1-SMB□□
(2)
(0)
RKD514HM-A
(TAE20S2-SNB□□)
各1台
TSLB
パルス・リミットコード
(0)
TAE10S1-LD□□(3)
(TAE10S2-LD□□)
2本
LT
LT…M
NT…V
NT
TAE10M5-TB
0
3
TAE10S3-LD□□( )
()
(TAE10S4-LD□□)
2本
+
TAE10R3-LCY
RT
AT
SA…M
AM
モータコード長さは、形式末尾の□□にて、最大5mまで1m単位で指定します。
(3mの場合の例:TAE20R6-SM03)
モータコード長さは、形式末尾の□□にて、最大10mまで1m単位で指定します。
(3mの場合の例:TAE20R8-SM03)
パルス・リミットコード長さは、形式末尾の□□にて、最大20mまで1m単位で指定します。
(3mの場合の例:TAE10S3-LD03)
尚、パルスコード長さは、1.5mです。
( )内は耐屈曲性に優れたコードです。
SA…DE
TZ
SP
電装システム
376
377
モータ・ドライバの仕様
TU
㈱安川電機製モータの仕様(RoHS指令適合品)
㈱安川電機製ドライバの仕様(RoHS指令適合品)
TSL…M
TSLH…M
CTLH…M
TX
CTX
φD
TC
φ
P
4-M
φd
LE
LM
□W
φP
TM
2-M
AL6、AL6B
Y027、Y028、Y032、Y033
LR
TS
CT
モータの仕様
ドライバの仕様
電圧
仕様
V
定格
出力
W
定格 瞬時最大 定格
モータイナーシャ JM
トルク トルク 回転数
×10−4 kg・m2
N・m
N・m r /min
AL6(1) SGMM-A2C312
24
AL6B
(1) SGMM-A2C312C
SGMAH-A5AAA21-E
Y027
SGMAH-01AAA21-E
Y028
SGMAH-02AAA21-E
Y029
SGMAH-04AAA21-E
Y030
SGMAH-08AAA21-E
Y031
SGMAH-A5AAA2C-E
Y032
SGMAH-01AAA2C-E
Y033
SGMAH-02AAA2C-E
Y034
SGMAH-04AAA2C-E
Y035
200
SGMAH-08AAA2C-E
Y036
SGMAS-02ACA21-E
Y039
SGMAS-04ACA21-E
Y040
SGMAS-06ACA21-E
Y041
SGMAS-08ACA21-E
Y042
SGMAS-02ACA2C-E
Y043
SGMAS-04ACA2C-E
Y044
SGMAS-06ACA2C-E
Y045
SGMAS-08ACA2C-E
Y046
1
注
( ) RoHS指令に適合していません。
20
20
50
100
200
400
750
50
100
200
400
750
200
400
600
750
200
400
600
750
0.0637
0.0637
0.159
0.318
0.637
1.27
2.39
0.159
0.318
0.637
1.27
2.39
0.637
1.27
1.91
2.39
0.637
1.27
1.91
2.39
モータ
記号
モータ形式
0.191
0.191
0.477
0.955
1.91
3.82
7.16
0.477
0.955
1.91
3.82
7.16
1.91
3.82
5.73
7.16
1.91
3.82
5.73
7.16
3000
0.00548
0.00673
0.0220
0.0364
0.106
0.173
0.672
0.0305
0.0449
0.164
0.231
0.812
0.116
0.190
0.326
0.769
0.180
0.254
0.390
0.940
エンコーダ仕様
0.16
0.26
0.4
0.5
1.1
インクリメンタル 1.7
13ビット
3.4
(8192pulse/rev) 0.7
0.8
1.6
2.2
4.3
0.9
1.2
インクリメンタル 1.7
2.5
17ビット
(131072
1.5
pulse/rev)
1.8
2.4
3.2
インクリメンタル
2048pulse/rev
モータの取付寸法
モータ
記号
□W×LM
単位
LR
LE
d
D
P
M
モータ
記号
□W×LM
LR
質量
kg
LE
d
D
P
mm
M
ドライバ形式
SGDFSGDHA2CP(1) A5AE-E
SGDH01AE-E
SGDH02AE-E
SGDH04AE-E
SGDHSGDSSGDS08AE-E 02A02A-E 04A02A-E
SGDS08A02A-E
適用モータ
記号
AL6B
AL6B
Y027
Y032
Y028
Y033
Y029
Y034
Y030
Y035
Y031
Y036
Y039
Y043
Y040
Y044
Y041
Y045
Y042
Y046
適用モータ
定格出力
20W
50W
100W
200W
400W
750W
200W
400W
600W
750W
フィードバック
インクリメンタル
エンコーダ
指令パルス
入力方式
シリアルエンコーダ
LT
符号+パルス列、90°位相二相パルス、CCW+CWパルスのうちいずれか1種類を選択
LT…M
指令パルス
入力形態
主回路
電源電圧
ラインドライバ、オープンコレクタ
DC24V
±10%
ラインドライバ
NT…V
NT
単相/三相 AC200〜230V −15〜10% 50/60Hz
単相 AC200〜230V −15〜10% 50/60Hz
制御回路電源
−
連続出力電流
Arms
2.0
0.64
0.91
2.1
2.8
05.7
2.1
2.8
05.5
最大出力電流
Arms
5.7
2.00
2.80
6.5
8.5
13.9
6.5
8.5
16.9
単相AC200〜230V −15〜10% 50/60Hz
SA…M
AM
00〜50℃
保存時周囲温度
−20〜85℃
使用・保存時
周囲湿度
90%RH以下(結露しないこと)
kg
RT
AT
使用時周囲温度
質量
TSLB
SA…DE
0.3
0.8
0.8
0.8
1.1
1.7
0.7
0.9
TZ
1.4
注(1) RoHS指令に適合していません。
378
25× 64
25× 92.5
40× 77
40× 94.5
60× 96.5
60×124.5
80×145
40×108.5
40×135
60×136
16
16
25
25
30
30
40
25
25
30
2.5
2.5
2.5
2.5
3
3
3
2.5
2.5
3
5
5
6
8
14
14
16
6
8
14
20
20
30
30
50
50
70
30
30
50
28
28
46
46
70
70
90
46
46
70
M3深5
M3深5
φ4.3
φ4.3
φ5.5
φ5.5
φ7.0
φ4.3
φ4.3
φ5.5
Y035
Y036
Y039
Y040
Y041
Y042
Y043
Y044
Y045
Y046
60×164
80×189.5
60× 80
60× 98.5
60×124.5
80×115
60×120
60×138.5
60×170.5
80×160
30
40
30
30
30
40
30
30
30
40
3
3
3
3
3
3
3
3
3
3
14
16
14
14
14
16
14
14
14
16
50
70
50
50
50
70
50
50
50
70
70
90
70
70
70
90
70
70
70
90
φ5.5
φ7.0
φ5.5
φ5.5
φ5.5
φ7.0
φ5.5
φ5.5
φ5.5
φ7.0
SP
電装システム
AL6
AL6B
Y027
Y028
Y029
Y030
Y031
Y032
Y033
Y034
379
モータ・ドライバの仕様
TU
パナソニック㈱製モータの仕様
パナソニック㈱製ドライバの仕様
TSL…M
TSLH…M
CTLH…M
TX
CTX
φD
□W
TC
φd
φ
P
LE
LM
TM
4-M
TS
CT
LR
モータの仕様
ドライバの仕様
電圧
仕様
V
定格
出力
W
定格 瞬時最大 定格
モータイナーシャ JM
トルク トルク 回転数
×10−4 kg・m2
N・m
N・m r /min
エンコーダ仕様
pulse/rev
質量
kg
ドライバ形式
モータ
記号
モータ形式
P001
MSMA5AZA1A
50
0.16
0.48
0.025
0.34
フィードバック
P002
MSMA012A1A
100
0.32
0.95
0.062
0.56
指令パルス入力方式
P003
MSMA022A1A
200
0.64
1.91
0.17
1.0
指令パルス入力形態
P004
MSMA042A1A
400
1.3
3.8
0.36
1.6
P005
MSMA082A1A
750
2.4
7.1
1.31
P006
MSMA5AZA1B
50
0.16
0.48
P007
MSMA012A1B
100
0.32
0.95
P008
MSMA022A1B
200
0.64
1.91
P009
MSMA042A1B
400
1.3
P010
MSMA082A1B
750
2.4
200
3000
インクリメンタル
2500
3.2
適用モータ記号
適用モータ定格出力
主回路電源電圧
モータ
記号
MSDA023A1A
MSDA043A1A
MSDA083A1A
P002、P007
P003、P008
P004、P009
P005、P010
50W
100W
200W
400W
750W
インクリメンタルエンコーダ
TSLB
2500pulse/rev
CW/CCWパルス信号、パルス信号/回転方向信号、90°位相差信号
ラインドライバ、オープンコレクタ
単相/三相 AC200V〜230V
−15〜10%
三相
AC200V〜230V
−15〜10%
50/60Hz
制御回路電源
0.066
0.76
電源容量 kVA
0.20
1.4
使用時周囲温度
0〜55℃(凍結なきこと)
3.8
0.39
2.0
保存時周囲温度
−20〜65℃(凍結なきこと)
7.1
1.39
3.9
使用・保存時周囲湿度
90%RH以下(結露なきこと)
単相 AC200V〜230V
0.3
1.0
0.3
1.0
−15〜10%
0.5
1.0
50/60Hz
LT
50/60Hz
0.9
1.3
LT…M
NT…V
NT
1.1
1.4
RT
単位 mm
LR
LE
d
D
P
M
P001
38× 73
25
3
8
30
45
φ3.4
P002
38×103
25
3
8
30
45
φ3.4
P003
60× 94
30
3
11
50
70
φ4.5
P004
60×123.5
30
3
14
50
70
φ4.5
P005
80×142.5
35
3
19
70
90
φ6
P006
38×105
25
3
8
30
45
φ3.4
P007
38×135
25
3
8
30
45
φ3.4
P008
60×127
30
3
11
50
70
φ4.5
P009
60×156.5
30
3
14
50
70
φ4.5
P010
80×177.5
35
3
19
70
90
φ6
AT
SA…M
AM
SA…DE
TZ
SP
電装システム
□W×LM
380
MSDA015A1A
P001、P006
0.53
0.030
質量 kg
モータの取付寸法
MSDA5A5A1A
381
モータ・ドライバの仕様
TU
三菱電機㈱製モータの仕様(RoHS指令適合品)
三菱電機㈱製ドライバの仕様(RoHS指令適合品)
TSL…M
TSLH…M
CTLH…M
φP
TC
TM
φd
LE
LM
φP
□W
φD
TX
CTX
4-M
2-M
LR
TS
CT
HL6、HL6B、J001、J002、J006、J007
モータの仕様
モータ
記号
ドライバの仕様
モータ形式
電圧
仕様
V
定格
出力
W
定格 瞬時最大 定格
モータイナーシャ JM
トルク トルク 回転数
×10−4 kg・m2
N・m
N・m r /min
J005、J010
100W
200W
400W
750W
DC21.6〜30V
1.9
0.42
0.99
制御回路電源
DC24V±10%
3.8
0.67
1.45
定格出力電流 A
1.6
0.83
3.0
最大出力電流 A
4.8
2.50
0.75
使用時周囲温度
0〜55℃(凍結のないこと)
0.89
保存時周囲温度
−20〜65℃(凍結のないこと)
1.6
使用・保存時周囲湿度
90%RH以下(結露しないこと)
0.72
2.1
質量 kg
1.635
4.0
HC-KFS13
100
0.32
0.95
J003
HC-KFS23
200
0.64
J004
HC-KFS43
400
1.3
J005
HC-KFS73
750
2.4
7.2
J006
HC-KFS053B
50
0.16
0.48
0.056
J007
HC-KFS13B
100
0.32
0.95
0.087
J008
HC-KFS23B
200
0.64
1.9
0.47
J009
HC-KFS43B
400
1.3
3.8
J010
HC-KFS73B
750
2.4
7.2
3000
1.51
2048pulse/rev
17ビット
アブソリュート・
インクリメンタル共用
インクリメンタルエンコーダ
TSLB
アブソリュート・インクリメンタル共用17ビットエンコーダ
符号+パルス列、90°位相二相パルス、CCW+CWパルスのうちいずれか1種類を選択
ラインドライバ、オープンコレクタ
0.2
三相AC200〜230V、50/60Hz又は単相AC230V、50/60Hz
単相AC200〜230V、50/60Hz
0.7
LT
0.71
1.1
2.3
15.8
2.20
3.4
6.9
18.6
0.7
LT…M
NT…V
NT
1.1
1.7
RT
単位 mm
□W×LM
LR
LE
d
D
P
M
HL6
28× 61
16
2.5
6
20
33
φ2.9
HL6B
28× 88
16
2.5
6
20
33
φ2.9
J001
40× 81.5
25
2.5
8
30
46
φ4.5
J002
40× 96.5
25
2.5
8
30
46
φ4.5
J003
60× 99.5
30
3
14
50
70
φ5.8
J004
60×124.5
30
3
14
50
70
φ5.8
J005
80×142
40
3
19
70
90
φ6.6
J006
40×109.5
25
2.5
8
30
46
φ4.5
J007
40×124.5
25
2.5
8
30
46
φ4.5
J008
60×131.5
30
3
14
50
70
φ5.8
J009
60×156.5
30
3
14
50
70
φ5.8
J010
80×177.5
40
3
19
70
90
φ6.6
AT
SA…M
AM
SA…DE
TZ
SP
電装システム
モータ
記号
382
J004、J009
50W
主回路電源電圧
0.053
モータの取付寸法
J003、J008
20W
0.53
0.0095
0.48
200
J002、J007
0.084
0.191
0.16
J002
MR-J2S-20A MR-J2S-40A MR-J2S-70A
J001、J006
指令パルス入力形態
0.0637
50
HC-KFS053
MR-J2S-10A
HL6、HL6B
指令パルス入力方式
20
HC-AQ0235BD
J001
適用モータ定格出力
MR-J2-03A5
0.4
0.0072
HL6B
適用モータ記号
0.32
0.191
24
ドライバ形式
フィードバック
0.0637
HC-AQ0235D
質量
kg
0.22
20
HL6
エンコーダ仕様
pulse/rev
383
モータ・ドライバの仕様
TU
多摩川精機㈱製モータの仕様(RoHS指令適合品)
多摩川精機㈱製ドライバの仕様(RoHS指令適合品)
TSL…M
TSLH…M
CTLH…M
TC
4.8
□14.5
φ4
φ11
TX
CTX
TM
2-M2.5深さ5
2
4.8
TS
CT
10
46.5
モータの仕様
モータ
記号
T001
ドライバの仕様
モータ形式
TS4861N4020E500
電圧
仕様
V
定格
出力
W
24
4
定格 瞬時最大 定格
モータイナーシャ JM
トルク トルク 回転数
×10−4 kg・m2
N・m
N・m r /min
0.0095
0.0285
4000
0.00064
レゾルバ仕様
pulse/rev
質量
kg
2048
0.05
ドライバ形式
適用モータ記号
適用モータ定格出力
フィードバック
TA8410N7318E936
T001
4W
指令パルス入力方式
CW/CCW信号、パルス信号/回転方向信号
指令パルス入力形態
ラインドライバ、オープンコレクタ
主回路電源電圧
DC24V
±10%
制御回路電源
DC24V
±10%
連続出力電流 Arms
最大出力電流 Arms
1.92
0〜40℃
保存時周囲温度
−10〜85℃(凍結のないこと)
質量 kg
LT
0.68
使用時周囲温度
使用・保存時周囲湿度
TSLB
ブラシレスレゾルバ
LT…M
NT…V
NT
90%以下(結露のないこと)
0.30
RT
AT
SA…M
AM
SA…DE
TZ
SP
電装システム
384
385
モータ・ドライバの仕様
TU
ステッピングモータの仕様(RoHS指令適合品)
モータの取付寸法
単位
mm
LM
L1
LE
LR
モータ形式
基本
ステップ角
励磁最大静止
トルク N・m
LR
LE
T002
20× 46.5
−
10
1.5
T003
20× 46.5
−
10
1.5
S2
38× 45
−
24
V001
20× 30
−
10
V004
28× 32
−
V005
42× 47
V006
42× 77
V007
V008
4
15
16
M2.0深2.0
4
15
16
M2.0深2.0
2
5
22
31
M3.0深3.5
1.5
4
16
16
M2.0深2.5
15
1.5
5
22
23
M2.5深2.5
−
20
2
5
22
31
M3.0深4.5
−
20
2
5
22
31
M3.0深4.5
60× 48.5
−
24
1.5
8
36
50
φ4.5
60× 88.5
−
24
1.5
8
36
50
φ4.5
V009
60× 59.5
−
24
1.5
8
36
50
φ4.5
V010
60× 99.5
−
24
1.5
8
36
50
φ4.5
V011
60× 89
−
24
1.5
8
36
50
φ4.5
V012
60×129
−
24
1.5
8
36
50
φ4.5
V013
85× 68
−
37
2
14
60
70
φ6.5
質量(参考)
kg
V014
85×119
−
37
2
14
60
70
φ6.5
V015
85× 98
−
37
2
14
60
70
φ6.5
−7
85×149
−
37
2
14
60
70
φ6.5
4-M
□B
電流
A/相
L1
B
モータの仕様
モータ
記号
□W×LM
D
□W
φd
φD
TSL…M
モータ
記号
ロータイナーシャ JM
kg・m2
d
M
TSLH…M
CTLH…M
T002
TS3682N2
0.72
0.024
0.35
04.00×10
0.085
T003
TS3692N2
1.80
0.024
0.35
04.00×10−7
0.085
V017
42× 47
62.0
20
2
5
22
31
M3.0深4.5
V018
60× 48.5
69.5
24
1.5
8
36
50
φ4.5
S2(1)
PX535MH-A
0.36
0.135
0.75
00.35×10−5
0.17
PK513PA
0.72
0.023
0.35
02.60×10−7
0.05
V004
PK523PA
0.72
0.048
0.35
09.00×10−7
0.11
V005
PK545AW
0.72
0.24
0.75
00.68×10−5
0.4
V006
PK545AWM
0.72
0.24
0.75
00.83×10−5
0.52
V007
PK564AE
0.72
0.42
1.4
01.75×10−5
0.6
PK564AEM
0.72
0.42
1.4
03.35×10−5
0.9
−5
V008
V009
PK566AE
0.72
0.83
1.4
02.80×10
0.8
V010
PK566AEM
0.72
0.83
1.4
04.40×10−5
1.1
V011
PK569AE
0.72
1.66
1.4
05.60×10−5
1.3
V012
PK569AEM
0.72
1.66
1.4
07.20×10−5
1.6
V013
PK596AE
0.72
2.1
1.4
14.00×10−5
1.7
V014
PK596AEM
0.72
2.1
1.4
24.70×10−5
2.4
V015
PK599AE
0.72
4.1
1.4
27.00×10−5
2.8
V016
PK599AEM
0.72
4.1
1.4
37.70×10−5
3.5
V017
PK545BW
0.72
0.24
0.75
00.68×10−5
0.4
V018
PK564BE
0.72
0.42
1.4
01.75×10−5
0.6
TC
TM
TS
CT
V016
V001
TX
CTX
TSLB
LT
LT…M
NT…V
NT
RT
AT
SA…M
AM
SA…DE
注
(1) RoHS指令に適合していません。
備考 モータ記号T002、T003は多摩川精機㈱製,その他はオリエンタルモーター㈱製です。
TZ
SP
電装システム
386
387
モータ・ドライバの仕様
TU
ステッピングモータ用ドライバの仕様(RoHS指令適合品)
ドライバ形式
TD5M13-L
eTD24A
CRD
5103P
CRD
5107P
RKD
507-A
RKD
507M-A
RKD
514L-A
RKD
514LM-A
V007
適用モータ記号
T002
V001
T003
S2
V004
V005
V006
V017
RKD
514HM-A
V013
V014
V015
V016
V008
V009
V010
V011
V012
V018
励磁方式
RKD
514H-A
TSL…M
TSLH…M
CTLH…M
TX
CTX
TC
マイクロステップ
マイクロステップ
最大500分割
マイクロステップ
TM
入力方式
入力形式
電源入力
CW/CCW信号、パルス信号/回転方向信号
フォトカプラ入力、
フォトカプラ入力、入力抵抗220Ω、
入力抵抗220Ω
入力電流10〜20mA
TS
CT
フォトカプラ入力、入力抵抗220Ω、入力電流10〜20mA
DC15〜36V
DC24V±10%
DC24V±10%
単相100-115V±15%
2.5A
3A
0.7A
50/60Hz 1A
周囲温度(動作時)
周囲湿度(動作時)
質量
CW/CCW信号、パルス信号/回転方向信号
0.17kg
単相100-115V±15%
50/60Hz 4.5A
0〜40℃
0〜50℃
(凍結のないこと)
(凍結のないこと)
85%以下
85%以下
(結露のないこと)
(結露のないこと)
0.06kg
0.04kg
0.4kg
0.85kg
TSLB
備考 詳細はドライバの取扱説明書をご参照ください。
LT
LT…M
NT…V
NT
RT
AT
SA…M
AM
SA…DE
TZ
SP
電装システム
388
389
モータ・ドライバの仕様
TU
ステッピングモータのトルク特性図
TSL…M
TSLH…M
CTLH…M
ハーフステップ
ハーフステップ
TX
CTX
フルステップ
フルステップ
TC
TM
モータ記号
モータ形番
ドライバ形式
モータ記号
モータ形番
ドライバ形式
モータ記号
モータ形番
ドライバ形式
T002
TS3682N2
TD-5M13-L
T003
TS3692N2
eTD-24A
V007
V018
PK564AE
PK564BE
RKD514L-A
モータ記号
モータ形番
ドライバ形式
V008
PK564AEM
RKD514LM-A
TS
CT
TSLB
モータ記号
モータ形番
ドライバ形式
モータ記号
モータ形番
ドライバ形式
モータ記号
モータ形番
ドライバ形式
S2
PX535MH-A
CRD5107P
V009
PK566AE
RKD514L-A
V010
PK566AEM
RKD514LM-A
LT
LT…M
NT…V
NT
RT
モータ記号
モータ形番
ドライバ形式
モータ記号
モータ形番
ドライバ形式
モータ記号
モータ形番
ドライバ形式
モータ記号
モータ形番
ドライバ形式
V001
PK513PA
CRD5103P
V004
PK523PA
CRD5103P
V011
PK569AE
RKD514L-A
V012
PK569AEM
RKD514LM-A
AT
SA…M
AM
SA…DE
TZ
SP
モータ形番
V005
V017
PK545AW
PK545BW
備考 PX535MH-Aのトルク特性は
390
ドライバ形式
RKD507-A
モータ記号
モータ形番
ドライバ形式
モータ記号
モータ形番
ドライバ形式
モータ記号
モータ形番
ドライバ形式
V006
PK545AWM
RKD507M-A
V013
PK596AE
RKD514H-A
V014
PK596AEM
RKD514HM-A
にお問い合わせください。
391
電装システム
モータ記号
モータ・ドライバの仕様
TU
モータ記号V001、V004、S2、T002、T003以外
ピン№
モータ記号
モータ形番
ドライバ形式
モータ記号
モータ形番
ドライバ形式
V015
PK599AE
RKD514H-A
V016
PK599AEM
RKD514HM-A
ブ
レ
ー
キ
な
し
モータ配線とコネクタの仕様
モータ記号S2の場合
ピン№
1
2
3
4
5
6
使用コネクタ(タイコ エレクトロニクス ジャパン合同会社製)
リード線の被服色
緑
白
黒
茶
橙
黄
灰
青
赤
紫
モータ側
相手側
プラグ・ハウジング
172168-1
キャップ・ハウジング
172160-1
接触子
170364-1
接触子
170366-1
未使用
ブ
レ
ー
キ
付
き
1
2
3
4
5
6
7
8
9
10
11
12
1
2
3
4
5
6
7
8
9
10
11
備考 相手側コネクタはお客様でご用意ください。
12
モータ記号T002、T003の場合
モータ記号 T002
ピン№
1
2
3
4
5
6
リード線の被服色
青
赤
橙
緑
黒
未使用
モータ記号 T003
ピン№
1
2
3
4
5
6
リード線の被服色
黒
未使用
青
赤
橙
緑
使用コネクタ(日本モレックス㈱製)
モータ側
相手側(1)
ハウジング
43025-0600
ハウジング
43020-0600
ターミナル
43030-0007
ターミナル
43031-0007
リード線の被服色
青
未使用
赤
未使用
橙
未使用
緑
未使用
黒
未使用
未使用
未使用
青
未使用
赤
未使用
橙
未使用
緑
未使用
黒
未使用
赤/白
(ブレーキ入力 +)
黒/白
(ブレーキ入力 −)
TSL…M
使用コネクタ(タイコ エレクトロニクス ジャパン合同会社製)
モータ側
相手側
TSLH…M
CTLH…M
TX
CTX
TC
TM
プラグ・ハウジング
キャップ・ハウジング
172170-1
172162-1
接触子
接触子
170364-1
170366-1
TS
CT
TSLB
備考1. 相手側コネクタはお客様でご用意ください。
2. V001及びV004は、モータ本体にコード側のコネクタを直接接続するため、配線は行いま
せん。
LT
LT…M
NT…V
NT
RT
注
(1) 相手側のコネクタはお客様にてご用意ください。
AT
SA…M
AM
SA…DE
TZ
SP
電装システム
392
393
プログラムコントローラの仕様
TU
CTN480G(RoHS指令適合品)
表2 一般仕様
CTN480G
サ不要で簡単にシステムを構成可能
wUSBインターフェースが標準装備されているので、パソコンによるデータ
の編集やコントローラ操作、ダイレクト実行が可能
xアブソリュートエンコーダ対応により原点復帰不要
y同期制御機能により、任意の軸の同時実行・停止が可能
zマルチタスク機能により、最大5本までのプログラムを同時実行可能
{あらかじめ位置決め補正データを入力しておくことで、位置決め精度補正
が可能
|軸専用入出力機能により、ドライバとの配線が容易
}リンク接続により最大コントローラ4台接続(16軸制御)が可能
形式
制御軸数
最大指令値
最大出力周波数
加減速時間
出力方式
入力方法
指令入力方式
プログラム容量
機能
入力点数
入力
操作入力
入
出
力
仕
様
入力方式
出力点数
出力
操作出力
出力方式
周囲湿度
20〜85%RH(結露しないこと)
停電対策
フラッシュメモリ
質量(参考)
1.2kg
その他の主な機能
CTN480G
4軸(同時実行可能)
±2147483648パルス(符号付き32ビット長)
6Mpps
0〜65.533sec(直線・サイクロイド・S字加減速)
CW/CCW方向パルス、方向指令/正逆パルス、90°位相差パルス
MDI、ティーチング、USBによるパソコン入力
アブソリュート指令 又は インクリメンタル指令
10000ステップ
ジャンプ、コール、繰返し、四則演算、速度設定、加減速設定、タイマ制御、
I/O制御、入力条件分岐、各種編集機能(作成、消去、削除、挿入、コピーなど)
LS入力
16点
汎用入力 20点
(I/O 増設ユニットにより、最大80点まで拡張可能)
スタート、ストップ、非常停止、正・逆手動運転、原点復帰、現在位置リセット、割込み、
位置決め完了、ドライバアラーム入力など(汎用入力にてパラメータで選択割付け)
フォトカプラ入力(無電圧接点 又は オープンコレクタ対応)
汎用出力 20点
(I/O 増設ユニットにより、最大80点まで拡張可能)
自動運転中、リミットセンサ検出、非常停止、パルス出力中、原点復帰完了、
サーボオン、ドライバアラームリセット、比例制御、
偏差カウンタクリア(汎用出力にてパラメータで選択割付け)
オープンコレクタ出力(DC30V 100mA MAX)
I/O用
DC24V
4A
リミット用 DC24V
100mA
USB(データ読取り、書込み、ダイレクト実行など)、コンパクトフラッシュ쏐によるプログラ
ムの保存・移動、リニアスケールによる位置補正、バックラッシ補正、ソフトウェアリミット、
LS論理補正、チェック機能(トレース、I/O、LS、停止条件)など、4軸直線補間、2軸円弧補間
C
N
3
︵
Z
︶
S1
S2
C
N
2
︵
Y
︶
ALM
C
F
ID
S3
TB
L
I
N
K
C
N
4
︵
W
︶
I
/
O
Program Controller
電源コネクタ
形式
10150-3000PE
(プラグ)
10350-52Y0-008
(カバー)
XW4B-03B1-H1
TC
TM
U
S
B
+
FG
表3 CTN480G付属品一覧
I/Oコネクタ
TX
CTX
RUN
C
N
1
︵
X
︶
TS
CT
DC24V
備考
55
75
4
115
住友スリーエム㈱
オムロン㈱
4832.1310(2個) Schurter AG
リンクコネクタ
CFS1/4C101J
DINレール
取付部品
TSLB
KOA㈱
㈱タカチ電機工業
DRT-1
LT
表4 オプション品
種類
ティーチング
ボックス
形式
LT…M
備考
NT…V
NT
TAE10M5-TB
I/O増設ユニット TAE10M6-KB
入力40点、出力40点
拡張(最大2台増設)
備考1. USB通信で使用するケーブルは、別途お客様にて
ご用意ください。
ケーブルは、コネクタA-Aタイプをご用意くださ
い(図1参照)。
2. コンパクトフラッシュ쏐(タイプⅠ準拠)
は、別途
お客様にてご用意ください(図2参照)
。
3. CompactFlash
(コンパクトフラッシュ)は、米国
SanDisk社の登録商標です。
RT
図1 USBケーブル(コネクタ:A-Aタイプ)
AT
SA…M
AM
SA…DE
TZ
SP
図2 コンパクトフラッシュ쏐(タイプⅠ準拠)
395
電装システム
入出力用電源
394
PWR
周囲温度
種類
TSLH…M
CTLH…M
CTN480G
0〜50℃
保存時 −10〜60℃
(終端抵抗)
項目
仕プ
様ロ
グ
ラ
ム
±10%
最大消費電流 4.5A
表1 機能・性能
出指
力令
仕パ
様ル
ス
DC24V
160
q最大10000ステップまでのプログラム入力が可能な超高機能タイプ
r最大6Mppsの高速パルス出力
s4軸直線補間・2軸円弧補間機能を標準装備
tリニアエンコーダによる位置補正に対応
uコンパクトフラッシュ쏐によるプログラムの保存・移動が可能
vI/Oシーケンス機能、タイマ、カウンタ、演算機能の内蔵によりシーケン
CTN480G
項目
電源電圧
TSL…M
4-φ4.5
形式
175
185
プログラムコントローラは、高機能で操作性のよい位置決め制御用のコントローラです。
プログラムコントローラは、各種モータ駆動用ドライバと組み合わせて使用することにより、
精密位置決めテーブルを始め、サーボモータやステッピングモータを使用した各種機械・装置を
制御することが可能です。
直動シリーズの紹介
成長の旗手、
直動シリーズ。
日本トムソンでは、今日まで直動案内に関連する数々
の製品を開発してまいりました。その品質と優れた機能特性が
認められ、直動案内機器の総合メーカーとして、多方面に応用
範囲の広い製品をお届けしております。
ここで紹介する
直動シリーズは、精密な位置決めを必
要とする半導体製造装置などの先端産業での伸びが著しく、今
後もメカトロニクス分野での大きな飛躍が期待されています。
なお、詳細は「直動シリーズ総合カタログ」をご参照ください。
LINEAR SERIES
408
409
410
411
● 製品の外観・仕様などは、改良のため予告なしに変更することがあります。
●本製品を輸出する際は、仕向国及び用途・需要者を確認いただき、客観要件に該当する場合は、
輸出許可申請等必要な手続きをお取りください。
●本カタログは正確を期して制作しておりますが、誤記・脱字等に起因する損害には責任を負いかねます。
再生紙を使用しています。
日本トムソン株式会社
CAT-1554 C 不許複製 O
Printed in Japan 2011.03
412
© Copyright 2026 Paperzz