第4章
制御対象の運動特性と運動方程式
4-1 静特性、動特性
PID 制御は、人間の考えにもっとも近い制御ルールとして広く使われている。
その特徴は、制御対象の大雑把な特性(静特性)をもとに、設計パラメータ Kp,Ki、
Kd を決めることができる。 言い換えれば、PID 制御は最大3つのパラメータ
を調節することで、制御目的に合うような制御を見つける考えである。
しかし、PID 制御ではどうしてもうまく制御できないものがあります。すなわ
ち、PID の調節は、まず、誤差を少なくするように、P 制御の調節が必要、また、
オフセットを無くすために、I 制御を加えること。ところが、なかなか定常状態
(オフセットの状態)まで落ち付かないシステムがある。
例:
ハンチング現象、ハンチング発散
PID 制御がうまくいくシステムは、制御対象が安定なものである。つまり、操
作量が少々ずれても、システムは暴走しないシステム。
例: タンクのレベル制御
エンジンの回転数制御
PID 制御がうまくいかない系は、制御対象が不安定なシステム。つまり、操作
量がずれたら、其のままほっとくと、出力が収束ではなく、発散するシステム。
例; 倒立振り子
磁気浮上
進路不安定船
このようなときには、PID 制御の3つのパラメータをどう調節しても、ハンチン
グから脱出することはできない。したがって、PID 制御とは違うやり方で操作信
号の大きさを決める必要があります。
・もっと沢山の情報を使う必要がある。
・運動性能をもっと知るべきである。
21
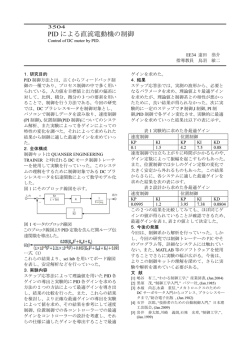
例 4-1 タンクの特性
: タンクの特性について、負荷曲線上の点は、 弁開度がある A% にし
たとき、タンクの水位は一定のレベル ya になる。弁開度が B%にした
とき、タンクレベルは yb になる。皆さん想像してぐらん。弁開度の
変化は瞬間的にできるが、水位レベルの変化は時間がかかる。すなわ
ち、上の曲線はタンク静特性である。じゃ、タンクの動特性はどうい
うものか?タンクの動特性は、時間経過を表すものである。
水位の変化の時間経過はタンクの動特性という。
なぜこのような動特性を考える必要があるか?磁気浮上の例で考えよ
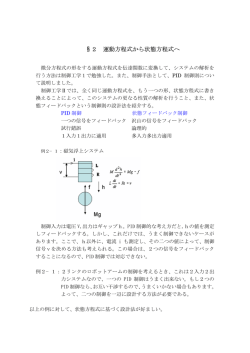
例4-2
磁気浮上系の特性
静特性(電磁石の力は、電流と正比例して、距離と反比例する
Mg = f = K1i − K 2 h )
22
この曲線は、hの値を大きくキープするためには、大きな電圧をかけ要が
ある。では、いま、VA でバランスがとっているとき、距離を開けるために、
この特性だったら、電圧を大きくすることが必要である。では、大きくした結
果、どうなりますか?その瞬間電磁力が大きくなり、重力より大きくなるので、
ボールを引き寄せます。その結果、hが小さくなり、それで力がさらにます、
という悪循環になるです。予想とは反対な結果となります。これは、この磁気
浮上システムはもともと不安定なシステムである。このとき静特性だけで制御
を考えではうまくいかないです。
よって、システムの動特性を考える必要がある。
システムの動特性は実験で調べることは当然できますが、タンクの場合、弁開
度を変化し、その後の水位の変化を時間をかけて記録することで、動特性がわ
かる。不安定なシステム場合は、危険が伴います。
そこで数理的な方法で調べることが制御の研究者が提案しています。システ
ムの動特性は運動方程式から求めることができる。
ここで PID 制御を説明するとき、私が物理問題の運動方程式を捨てたけど、
実際は運動方程式を使う必要が出てきました。即ち、運動方程式から、システ
ムが目標値に落ち着くための構造的な条件を見つける必要があります。この条
件を満たすように制御ルールを決める。
23
4-2
運動方程式――>システムの動特性
A)運動方程式は、時間とともに変化する物理量の間の因果関係を表す式である。
多くのシステムは、微分方程式の形をとる。
例4-3:
振り子の運動を考えよ。
Mg sin θ = − Ml θ&&
例4-4 LRC回路の運動方程式を導出せよ。
V (t ) = Ri(t ) + L
t
di (t )
+ C ∫ i (t )dt (電圧、電流、Vc の順にグラフで表す)
0
dt
運動方程式の多くは微分方程式であらわされる。これは、時刻tという瞬間に
おける各物理量の関係を表す。この式から、個別の物理量の時間経過を求める
ことができる。
操作信号の大きさが変化するとき、対応する出力信号の時間経過はシステム
24
の動特性という。
B)運動方程式から、運動の特徴(安定性など)が読み取れる。
このように、運動方程式からシステムの動特性を求めることができる。動特
性を求めるのに、2種類の方法がある。
方法1) 運動方程式を解く(各物理量の時間グラフを求める)
――>式で解く、コンピュータ
方法 2) 運動方程式のパラメータから動特性の特徴を見つける。
(昔の方法)
方法1はシステムの特徴をチェックするために使える方法 2 は、システム特徴
のチェックだけでなく、制御則の設計を行うための基準を見つけることができ
る。方法 2 を説明するために、運動方程式の変形を紹介する。
4-3 運動方程式の別表現1:伝達関数
4-3-1 「伝達関数の定義」
入力が u (t ) ,出力が y (t ) であるシステムにおいて、
初期値がゼロのとき、出力信号と入力信号のラプラス変換の比
y(s)
をシステムの伝達関数という。
u(s)
プラス変換に関する詳細は省略する。
結論からいうと、運動方程式を代数方程式に書き換えるためには、運動方程式
の各項目をラプラス変換する。このとき、
方法: 微分演算は演算子sでとなり、積分演算は演算子 1/s となる。
例:4-5 バネ、ダンパ系の運動方程式
M&x&(t ) = K 2 ( w(t ) − x(t )) + B2 ( w& (t ) − x& (t ))
25
ラプラス変換:
伝達関数:
Ms 2 X ( s ) = K 2 ( w( s ) − x( s )) + B2 ( sw( s ) − sx( s ))
( Ms 2 + B2 s + K 2 ) x( s ) = ( B2 s + K 2 ) w( s )
( B2 s + K 2 )
x( s ) =
w( s )
( Ms 2 + B2 s + K 2 )
G ( s) =
( B2 s + K 2 )
x( s )
=
w( s ) ( Ms 2 + B2 s + K 2 )
例4-6:RLC回路の運動方程式を伝達関数に書き換えよ。
di (t ) 1 t
V (t ) = Ri(t ) + L
+ ∫ i (t )dt
dt
C 0
である。これを以下のように書き換える
1
V ( s ) = Ri( s ) + Lsi ( s ) + i ( s)
Cs
Cs
1
=
V (s)
よって i ( s ) =
1
CRs + CLs + 1
R + Ls +
Cs
Cs
V から i までの伝達関数は
CRs + CLs + 1
補足:
ラプラス変換の定義と性質
時間 t の関数 f (t ) -----ラプラス変換--Æ 複数変数sの関数
f (s)
Å---逆ラプラス変換--
ラプラス変換:
∞
f ( s ) = ∫ e − st f (t )dt
、(
0
逆ラプラス変換
f (t ) =
1
2πj
∞
∫−∞ e
st
f ( s ) = L( f (t )) )
F ( s )ds ( f (t ) = L−1 ( f ( s))
として定義される。 f (t ) = L−1 ( F ( s )) と記す。ラプラプ変換と逆変換は一対
一の関係である。
z
例:f(t)=1, (ステップ関数)、
f (s) =
1
s
f (t ) = sin(ωt ) , f ( s ) =
26
ω
s + ω2
2
例のように、具体的に時間関数 f(t)が与えられたとき、そのラプラス変換後の
形は計算できる。
ラプラス変換表と性質は章末に書いています。よく使う性質をここに書く。
運動方程式に関しては、
1. 線形法則 L[ f (t )[= F ( s ), L[ g (t )] = G ( s ) のとき、
L[af (t ) + bg (t )] = aF ( s ) + bG ( s )
2. 微分法則: L[ f (t )] = F ( s ) のとき、
L[ f ' (t )] = sF ( s ) − f (0)
(ア)
(イ)
(ウ)
①
②
L[ f ( n ) (t )] = s n F ( s ) − f (0) s n −1 − f ' (0) s n−2 − L f ( n −1) (0)
積分法則: L[ f (t )] = F ( s ) のとき、
t
1
L[ ∫ f (t )dt ] = F ( s)
0
s
t t1
1
L[ ∫ ∫ L f (t )dtdt1 L] = n F ( s)
0 0
s
我々は、微分方程式をラプラス変換して、伝達関数に書き換えるときは、こ
のラプラス変換性質を使っています。
例: モータで負荷を回す運動方程式
Jω& = T − bω = Ku − bω ,
(T: モータトルク=Ku
、J:慣性モーメント、b: 摩擦係数)
入力を電圧 u,出力を回転速度 ω とするときの伝達関数を求めよ。
解: u (t ) のラプラス変換を u(s)、 θ (t ) のラプラス変換を θ (s ) とおく。
運動方程式をラプラス変換すると
Jsθ ( s) = Ku ( s) − bθ ( s)
よって、伝達関数は
θ ( s)
K
G(s) =
=
u ( s) Js + b
27
例:上の例で、J=1, b=0.5, K=2 ,u=3 とするときのθ(t)を求めよ
解、 伝達関数の式より、
K
2 3
1
2
2
θ ( s) =
u(s) =
=6
= 6( −
)
Js + b
s + 0.5 s
( s + 0.5) s
s s + 0.5
2
2
ω (t ) = L−1[6( −
)] = 12(1 − e −0.5t )
s s + 0.5
このように、微分方程式にラプラス変換をおよぼすことによって、伝達関数
に変換でき、この伝達関数を用いて、
1) システムの分析
3) 微分方程式の解を求める
伝達関数に関する以下のことを覚えましょう:
①
伝達関数の定義
伝達関数=
出力信号( s )
(注:ラプラス変換を求める
入力信号( s )
とき、運動方程式の初期条件をゼロと仮定する)
、
②
伝達関数を述べるとき、必ず入力と出入を明白にする
(入力 r から出力 y までの伝達関数、、
、
)
③
伝達関数についてシステムを表現するとき、出力=伝達関数・入力
④
伝達関数のメリット:連結システムの表現が簡単になる
4-3-2 伝達関数の結合――>システム表現
ブロック線図: 制御系の各構成部分の特徴(伝達関数)と信号の流れを表す
図形。
システムの基本的な結合の伝達関数:
28
4-4 運動方程式――>状態方程式
運動方程式(高次、連立)を連立一次微分方程式にで書き換える。
[x& ] = Ax + Bu
y = Cx
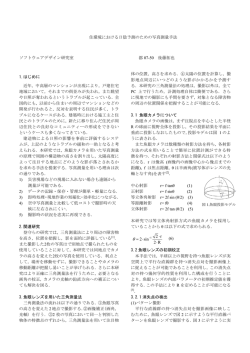
例:
Mg sin θ + Ml θ&& = 0 を状態方程式に書き換える。
Step1) 微分階数(2)と同じ数の状態変数(中間変数)を設定する。
例 3-2-1 振り子の運動を考えよ。
Mg sin θ = − Ml θ&&
角度が小さいとき、
Mgθ = − Ml θ&&
と近似できる。経験上、長い振り子は速く揺るがすことが難しい。つまり、長い振
り子の固有振動周期が長いことがわかる。この特徴は θ の2次微分項の係数に表れ
ている。
このように運動方程式のパラメータ(係数)から、沢山の情報を読み取るこ
とができます。安定性の判断もできます。従ってよい制御を行うためには、シ
ステムの運動方程式を分析し、適切な制御則を決めることが大切です。
以下、いくつかのシステムの運動方程式を紹介する。
例 3-2-3
ロボットアームの運動方程式
初期状態
:
水平、 θ = 0、 θ& = 0
最終状態
:
直角
中間状態
:
θ=
π
、 θ& = 0
2
&
&
&
Jθ + bθ = T − mgr sin(θ )
運動方程式
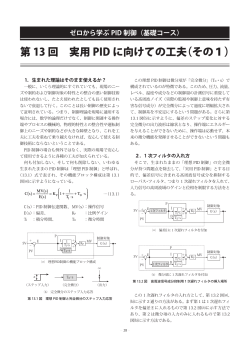
演習問題:
1. シーソ上に転がるボールの半径はr、質量 m である。シーソ角度αと
ボール位置 x の関係を運動方程式で表せ。
29
解 上の図から、ボールを拡大して、以下の図を描く。
ボールの斜面に沿った運動を考える。ボールに作用する力は重力 mg の斜面方向
の分力 mg sin(α ) である。この力によって、ボールは斜面に転がる加
速度を得る。一方、ボールの動きは、二つの部分で構成されます。
それは、重心が斜面に対する平衡移動とそのほかの部分が重心に対
する回転運動である。
斜面に対するボールの運動方程式は以下となる(剛体の力学から)。
d 2x
J
m
)
+
= mg sin(α )
r2
dt 2
ここで、Jはボールの重心に対する慣性モーメントである。
(
30
付録 1: ラプラス変換とその性質
区間 [0,+∞ ) で定義される関数 f (t ) に対して、 無限積分で定義される関数
∞
F ( s ) = ∫ e − st f (t )dt
0
を f (t ) のラプラス変換という。F ( s ) = L ( f (t )) と記す。ここでsは複素数変数である。
逆に、複素関数 F (s ) が与えられたとき、その原関数 f (t ) は
f (t ) =
1
2πj
∞
∫−∞ e
st
F ( s )ds
として求め、 F (s ) の逆ラプラス変換という。
主な関数のラプラス変換表:
時間関数
f (t ) = L−1 ( F ( s )) と記す。
s 関数
f(t)
δ (t )
インパルス関数
1
⎧0, t < 0
f (t ) = ⎨
⎩1, t ≥ 0
単位ステップ関数
1
s
t
速度関数
指数関数
三角関数
F(s)
1
s2
1
s−a
e at
正弦波
sin(ωt )
ω
s +ω2
2
余弦波
cos(ωt )
s
S +ω2
2
ω
e − at sin(ωt )
減衰正弦波
( s + a) 2 + ω 2
e − at con(ωt )
減衰余弦波
s+a
( s + a) 2 + ω 2
主なラプラス変換の性質: L{ f (t )} = F ( s) , L{g (t )} = G ( s ) とする
線形法則:
L{af (t ) + bg (t ) = aF ( s) + bG ( s)
微分法則:
①
②
積分法則:
①
畳込み積分法則
最終定理:
L[ f ' (t )] = sF ( s) − f (0)
L[ f ( n ) (t )] = s n F ( s ) − f (0) s n−1 − f ' (0) s n −2 − L f ( n −1) (0)
t
1
1
L[ ∫ f (t )dt ] = F ( s) , ② L{∫ L ∫ f (t )dt n } = n F ( s )
0
s
s
:
t
t
0
0
L{∫ f (t − τ ) g (τ )dτ } = L{∫ f (τ ) g (t − τ )dτ } = F ( s)G ( s )
lim f (t ) = lim sF ( s )
t →∞
s →0
31
© Copyright 2026 Paperzz