3PS-3101
平成28年 神奈川県ものづくり技術交流会 予稿
電気熱量効果による新規固体冷却素子の検討
湘南工科大学院 工学研究科 電気情報工学専攻
湘南工科大学
工学部
電気電子工学科
湘南工科大学院 工学研究科 電気情報工学専攻
1.緒言
強誘電体が持つ電気的特性として電気熱量効果
(Electrocaloric effect)が存在する。電気熱量効果とは
電場により物質の電気双極子モーメントの制御を行い、
エントロピーの変化によって発熱や吸熱を起こす現象
である。この電気熱量効果を利用した新規冷却素子を
開発するべく、研究が推し進められている。既存の冷
却素子と比較し、小型化が容易、高エネルギ効率、安
全等の利点があるが実現には至っていない。主な要因
としては、室温における電気熱量効果が高い強誘電体
化合物は発見されているが、環境負荷を与える鉛有材
料であること、電場印加・除去による素子の温度変化
に関する基礎研究が不足している点が挙げられる。
当研究では新規固体冷却素子の実現をする為に、効
果的な冷却が可能な非鉛強誘電体化合物の調査を行っ
た。
2.測定試料
本研究で用いた強誘電体材料は、鉛を有しないセラ
ミックスの Ba(Zr0.2,Ti0.8)O3 (BZT セラミックス)であ
る。焼結温度は 1300℃と 1450℃で作製した。
3.測定方法
誘電の誘電特性は試料の温度を 20℃から 80℃の間
で変化させて静電容量を測定した。また、電場と分極
の関係を同じ温度範囲で行った。また、0.1Hz の三角
波を試料に加え、その時の試料温度と電場の関係を測
定した。
4. 測定結果
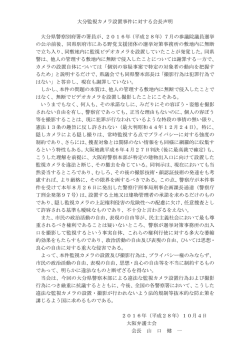
2つのBZTセラミックスの温度と誘電率の関係を図
1 に示す。温度を上昇させていった場合、1300℃焼結
BZT の場合は温度変化に伴い、誘電率は 40℃付近を
ピークに緩やかな上昇と下降を示すが、1450℃焼結
BZT は 33℃付近で急激な誘電率の上昇を示した。い
ずれの試料も、室温近傍に相転移温度を有する為、室
温環境で動作する素子には適していると思われる。分
極は 1450℃焼結 BZT のほうが総じて大きく、温度変
化も大きかった。電気熱量効果による温度変化は、
1450℃焼結 BZT のほうが大きかった。
5.まとめ
本研究によって、以下に示す結果が得られた。
1) BZT セラミックス試料の電気熱量効果による温度
変化は、1450℃焼結試料のほうが大きかった。誘
電特性、分極特性とも相関があると考えられる。
○大場 勇輝
木下 敬史
眞岩 宏司
2)電場 30kV/cm を加えたときの電気熱量効果による
温度変化は 1400℃焼結試料で 0.34K、分極の温度
変化から求めた温度変化は 0.33K であり、両者は
比較的良い一致を示した。
図1
温度と誘電特性
図 2 電場印加と分極特性
図 3 電場印加と温度変化特性
参考文献
[1] 眞岩宏司(2015)「電気熱量効果の固体冷却素子へ
の応用」,『超音波 TECHNO』2015.7-8,pp.33-38,日
本工業出版
3PS-3102
平成28年 神奈川県ものづくり技術交流会 予稿
MEMS センサを用いたミニチャネル内沸騰伝熱量の評価
明治大学大学院
明治大学
理工学研究科
理工学部
1. 緒論
近年、工業製品の高発熱密度化により高性能な冷却技
術の開発が必要とされている.
ミニ/マイクロチャネル内
沸騰現象は高い除熱能が得られるため研究は盛んに行わ
れている.しかしながら高速に生じる沸騰現象の詳細な
計測は難しく,
その伝熱機構は十分に解明されていない.
高速な伝熱機構の解明には高時空間分解能を有する
MEMS センサは有効手法である.そこで本報では,ミ
ニチャネル内沸騰現象の研究用に開発した MEMS セン
サを用いた壁面温度計測結果および熱伝導解析による壁
面熱輸送の評価について報告する.
○細谷 亮介
中別府 修
ニチャネル内沸騰の壁面熱輸送量の評価を示す.評価に
用いた計測例では 2 回発生した沸騰気泡のセンサ上滞在
時間は計測時間の約 40%に対して沸騰熱伝達による壁
面熱輸送量は全壁面熱輸送量に対して約 70%と沸騰気
泡が熱伝達を促進させていることが示された.以上のこ
とからミニチャネル内沸騰熱伝達において,気泡下に形
成されるミクロ液膜の蒸発が重要な伝熱機構であること
がわかった.
2. 実験装置及び MEMS センサ
図 1 に実験装置概略図と製作した MEMS センサを示
す.
流路断面は矩形でチャネル高さは 0.4mm,
幅4mm,
長さ 50mm である.本センサはスライドガラスを基板と
し,4 線式の薄膜測温抵抗体(RTD)と,背面のヒータ
ーから構成され,全デバイス上に 1μm 程度の SiO2 絶縁
層を有している.加熱脱気した蒸留水をシリンジポンプ
により 33.3kg/m2s でチャネルに供給し,背面ヒーター
で加熱して沸騰させた.沸騰挙動を同軸落射照明法によ
り流路上方からハイスピードカメラで撮影する.実験に
おいて壁面温度データは 10kHz で取得し,沸騰挙動は
5000fps で撮影した.本実験系では,微小領域の温度計測
と気泡挙動の高速顕微観察を同時に行うことができる.
図 2 気泡成長時の壁面温度変化計測結果
および壁面熱輸送の評価
図 1 実験装置概略図と MEMS センサ
3. ミニチャネル内沸騰の伝熱現象
図 2 に沸騰気泡が発生,成長,離脱の過程における壁
面温度変化計測例とその結果を用いて一次元非定常熱伝
導解析より算出した壁面熱流束及び熱輸送量を示してい
る.気泡先端の通過時に気泡下にミクロ液膜が形成され
ることにより急激な温度低下が生じ,壁面熱流束も急激
な増加が示された.その後,液膜の蒸発による温度低下
とドライアウトによる壁面温度の上昇が示された.壁面
伝熱量の評価において,液膜の形成からドライアウトま
での伝熱量qw に対する液膜蒸発による伝熱量qw_evp の割
合はどちらも 90%以上であることが示された.図 3 にミ
図 3 ミニチャネル内沸騰の壁面熱輸送の評価(RTD4)
4. まとめ
・MEMS センサによる壁面温度計測において気泡成長
時のミクロ液膜の形成,蒸発,ドライアウトに対応した
温度変化を捉え,熱伝導解析の結果ミクロ液膜の蒸発が
重要な伝熱機構であることがわかった.
3PS-3103
平成28年 神奈川県ものづくり技術交流会 予稿
MEMS を用いたエンジン内壁面熱流束計測の研究
明治大学大学院 理工学研究科
明治大学
理工学部
1. はじめに
本研究グループは内閣府の SIP(戦略的イノベーショ
ン創造プログラム)革新的燃焼技術(1)に所属し、エンジ
ン内壁面熱流束センサの開発を担っている。これまでに
シリコン基板 MEMS 熱流束センサによる燃焼場の壁面
熱流束研究から始まり、ステンレス基板 MEMS 熱流束
センサによる予混合燃焼場の壁面熱流束計測を行ってき
た。そして実機への搭載を想定したプラグ型アルミ合金
基板 MEMS 熱流束センサを製作し、急速圧縮膨張装置
(RCEM)を用いて計測試験を行った。
2. プラグ型 MEMS 熱流束センサ
図1に製作したプラグ型MEMS熱流束センサを示す。
金属基板上に絶縁層を介し白金測温抵抗体(RTD)が搭
載されている。隣接する微小乱流火炎からの熱流を計測
するため計測点を 3 点設けた。その内2点は数百ミクロ
ンスケールを持つ乱流火炎を計測するためセンササイズ
を 200m 角とし、1 点は熱流束較正(2)のために 1200m
角とした。基板材料はエンジンと同等な壁面温度計測を
行うためにエンジン材料に多く用いられる AC8A アル
ミ合金とし、配線は燃焼場への干渉を防ぐため基板を貫
通し背面から取り出す構造とした。熱流束計測方法は、
壁面温度を計測し非定常熱伝導解析を通じて熱流束を求
める過渡熱伝導法(2)を採用した。
3. 急速圧縮膨張装置を用いた熱流束計測試験
RCEM を用いて筒内圧力数メガパスカルの環境下で
乱流燃焼場の壁面熱流束を計測し、自作 MEMS 熱流束
センサの計測試験を行った。図 2 に実験装置概略図を示
す。センサは燃焼器ヘッド端部からシリンダライナーに
沿って 9mm の位置に面一に設置した。RCEM の圧縮、
膨張行程は各 30ms(1000RPM 相当)である。また行
程中はピエゾ式圧力センサで燃焼室内の圧力も計測する。
計測データは 500kHz でサンプリングし、その後 25kHz
にデータ数を圧縮している。図 3 に自作センサの計測結
果を示す。熱流束は上死点付近でピークとなり、約 28ms
で最大熱流束 15.3MW/m2 を計測した。また、標準偏差
から熱流束のノイズレベルを評価したところ、27kW/m2
となった。筒内圧力は最大で 5.8MPa まで上昇したがセ
ンサは正常に稼働した。
3. まとめ
AC8A アルミ合金基板上に薄膜抵抗体センサを蒸着さ
せ、
プラグ型の MEMS 熱流束センサを製作した。
RCEM
を用いて計測試験を行った結果、筒内圧力約 5MPa の環
境下で計測可能であることを確認した。またピーク熱流
束 15.3MW/m2 を標準偏差 27kW/m2 で計測し、信号に
対しノイズは 1%以内であった。
○長坂 圭輔、中村
中別府 修
優斗、土屋
智洋、出島
一仁
参考文献
[1]. 戦略的イノベーション創造プログラム(SIP) – 科学技
術 振 興 機 構
革 新 的 燃 焼 技 術
http://www.jst.go.jp/sip/k01.html
[2]. 中別府・他,燃焼場の壁面熱流束を計測する薄膜抵抗体
センサに関する研究,日本機械学会論文集 採択済み
謝辞
本研究は SIP(戦略的イノベーション創造プログラム)
革新的燃焼技術に関する研究として実施したものである.
また試験設備は東京工業大学工学院小酒,佐藤研究室の
協力を承った。これらの方々に深く敬意を表す。
図 1 プラグ型 MEMS 熱流束センサ
図 2 急速膨張圧縮装置
図 3 熱流束計測結果
3PS-3104
平成28年 神奈川県ものづくり技術交流会 予稿
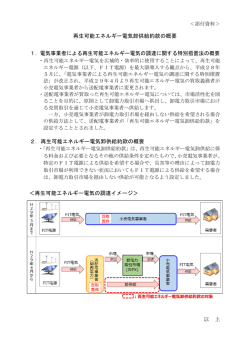
神奈川県産業技術センター電子技術分野の活用方法の紹介について
神奈川県産業技術センター
電子技術部
1.はじめに
公的な試験研究機関である神奈川県産業技術センター
は機械・材料技術分野、化学技術分野と共に、電子技術
分野にも対応しています。ここでは、電子技術分野に所
属する職員と機器を活用して、企業の皆様にどのような
技術サービスを提供できるか、ご紹介させていただきま
す。
2.半導体、実装関係の技術サービス例
・金属材料を原料として、電子線やプラズマを用いて加
熱することにより金属薄膜を作製します。
・シランガスを原料として、熱やプラズマを用いて分解
することにより半導体薄膜を作製します。
・電子線を用いて基板表面に微細なパターンを描き出し
ます。
・紫外線を用いて基板表面に微細なパターンを焼き付け
ます。
・MEMS 技術により微細な金型を作製します。これを
基板に押し当てれば、微細な構造が印刷されます。
・機能性樹脂をインクにして、フレキシブルシートに電
子回路を印刷します。
・半導体薄膜の微細な構造をエックス線回折により調べ
ます。
・磁性材料についてサンプルの形状や用途に合わせた最
適な方法により、磁気特性を測定します。
・半導体ウエハやチップ上のダイオードに針を当てて、
電気特性を測定します。
・実装基板上の部品や半田を引っ張ることにより、接合
強度を調べます。
・実装基板を高温でリフローしている最中に、顕微鏡で
サンプルの状態を観察します。
・半導体パワーモジュールを長時間動作させて、耐久性
試験を行います。
・半導体パワーモジュールに超音波を当てて、内部のモ
ールド樹脂に剥離がないか観察します。
3.電子回路、システム関係の技術サービス例
・電気製品の耐電圧や漏れ電流を測定して、電気的安全
性を確認します。
・製品に温度・湿度の変化や熱衝撃を与えて、劣化を加
速させる試験を行います。
・電気製品に高周波の電波を当てて、製品が誤動作しな
いか調べます。
・電気製品から発生する高周波の電波を測定して、電磁
環境規制の規格を満たしているか調べます。
・誘電材料についてサンプルの形状や使用周波数に合わ
せた最適な方法により、高周波インピーダンスを測定
します。
栗原 幸男
・高周波で使用する部品の形状を設計し、電磁界シミュ
レータで高周波特性を予測します。
・工場用のネットワーク装置が規格で定められた性能を
満たしているかどうかを試験します。
・製造設備の動作を高速度カメラで撮影し、スロー再生
により正常に動作しているか確認します。
・手の届かない機械の内部にファイバースコープ(工業
用内視鏡)を入れて、異常がないか観察します。
・制御で使用する小型のボードコンピュータを設計して
試作します。
・電力用の DC/DC 変換器やソレノイドコイルを設計し
て、試作します。
・太陽光パネル、蓄電池、電力変換器からなる電力シス
テムについて、コンピュータ上に監視システムを作成
します。
・高齢者や身障者の生活を支援するロボットの技術開発
について助言します。
4.おわりに
本稿でご紹介したのは神奈川県産業技術センターで取
り組んでいる技術サービスの一例です。一部の機器につ
いては条件が合えば、利用される方に機器を操作しても
らうこともできます。
企業の皆様には様々な技術課題をお持ちとのことと思
いますので、遠慮なく当センターまでお問い合わせいた
だきますようにお願いします。
3PS-3106
平成28年 神奈川県ものづくり技術交流会 予稿
電子線描画を用いたガラス熱ナノインプリント用 Ni-W 金型の開発
神奈川県産業技術センター 電子技術部
1.はじめに
光の反射を抑制し、鮮明な写真や写りこみのないテレ
ビ画面などが得られる微細形状としてナノ周期構造体が
注目され、ガラス表面にナノ周期構造体を形成するガラ
ス熱ナノインプリント技術が検討されている。しかしな
がら、一般的なガラス熱ナノインプリントの加熱温度は
600℃付近と高温であるため、耐熱性とガラスに対する
離型性が要求される。そこで、発表者らは、ガラス熱ナ
○安井 学、黒内 正仁、金子 智、小沢 武
認した。また、SU8 ナノパターンを原版とした Ni-W ナ
ノパターンを図 2 に示す。表面が粗くなりやすい Ni-W
めっき対して、金属濃度を上げることにより、ナノサイ
ズの Ni-W ナノパターンを形成できることを確認した。
4.まとめ
レジストの処理条件とめっき液の条件を検討すること
により、Ni-W パターンを 40μm 周期から 480nm 周期
へと微細化することに成功した。
ノインプリント用金型として、めっきで得られる Ni-W
膜の耐熱性と耐食性に注目し、硼珪酸ガラスに対するガ
ラス熱インプリント用金型として、Ni-W 膜が使えるこ
とを示した 1)、2)。ただし、試作した金型上のパターンは
40μm 周期のストライプパターンであり、更にパターン
サイズを小さくする必要がある。
そこで、代表的なナノ加工技術である電子線描画に適
したレジストの処理条件を検討し、ナノサイズのレジス
トパターンを作製した。そして、このパターンを原版と
してナノサイズに適した Ni-W めっきを行って、ナノサ
イズの Ni-W パターンを試作したので、その結果を報告
する。
2.実験方法
レジストに化学増幅型ネガ型レジストである SU8 を
用いた。W 基板上に 100 nm の厚みで塗布した SU8 に
対して、240 nm 角の正方形を 240 nm 間隔で縦横に配
置したパターンを描画した。使用した電子線描画装置は
エリオニクス社製の ELS-7000、加速電圧は 75 kV、電
流値は 1.0×10-11 A とした。また、露光時間は 0.7μs とし
た。そして、63 ℃の熱処理を 1 分間行った。現像では、
プロピレングリコール 1-モノメチルエーテル 2-アセタ
ートに 5 分浸漬し、イソプロパノールで洗浄した。
次に、 Ni-W めっき液としてスルファミン酸ニッケル、
タングステン酸ナトリウム、クエン酸アンモニウム、ギ
酸ナトリウムを純水に溶解させた。その組成は 1:1:2:
1 とした。スルファミン酸ニッケルから得られる Ni イオ
ンとタングステン酸ナトリウムから得られる W イオン
を合せた金属濃度を 1.0 M に調整した。クエン酸アンモ
ニウム、ギ酸ナトリウムは添加剤として用いた。析出条
件として、浴温を 60 ℃、電流密度を 1200 A/m2、析出
時間を 30 秒とした。
3.実験結果
図 1 に 480 nm 周期で描画した SU8 ナノパターンを
示す。残渣などが発生し易い化学増幅型レジストである
SU8 に対して、膜厚と熱処理温度を検討することにより、
ナノサイズの SU8 ナノパターンを形成できることを確
図 1 480nm 周期の SU8 パターン
(Copyright 2015 The Japan Society of Applied Physics)
図 2 480nm 周期の Ni-W パターン
(Copyright 2015 The Japan Society of Applied Physics)
文献
1) M. Yasui, S. Kaneko, M. Takahashi, H. Ito, M. Arai, Y.
Hirabayashi, T. Ozawa, and R. Maeda, JJAP, 52, 11NJ05
(2013).
2) 安井学,金子智,高橋正春,伊藤寛明,荒井政大,平林康男,小沢武,
前田龍太郎,日本機械学会論文集(A 編), 第 79 巻, pp.507
(2013).
3PS-3107
平成28年 神奈川県ものづくり技術交流会 予稿
10B 鉛筆で塗りつぶした紙へのレーザー照射による多層グラフェン粒の成長
神奈川県産業技術センター 電子技術部
○金子 智、安井 学、黒内 正仁、小沢 武
機械・材料技術部
本泉 佑、良知 健、斉藤 光弘
化学技術部
田中 聡美、加藤 千尋
(公財)神奈川科学技術アカデミー
牛山 幹夫、伊藤 裕子、小沼 誠司
大阪府立産業技術総合研究所
佐藤 和郎
1.はじめに
グラファイトの一層から成るグラフェンは新しい物理
を含んだ新素材として注目されている。その作製法とし
ては、
(1)グラファイトをスコッチテープで繰り返し剥が
す方法、(2)化学気相法(CVD法)、(3)シリコン・カーバ
イト(SiC)の熱分解法などが知られている。しかし、グラ
ファイトの引き剥がしでは小さな形状のグラフェンしか
作製できない。CVD法は金属触媒を必要とするために、
製膜後には膜を絶縁基板上に張り替える必要がある。ま
た、SiCの熱処理には高温が必要となる。
本発表では、紙と鉛筆とレーザーを用いた新しいグラ
フェンの作製法を提案する。鉛筆で塗り潰した紙の表面
に、フェムト秒レーザー装置を用いてレーザー照射する
ことでグラフェンを成長させる。この手法は、大気中の
室温で行われるため、熱分解法のような高温もCVD法の
高真空も不要である。更に、絶縁基板上にも応用できる
ため、CVD法では必須なグラフェンの絶縁基板上への転
写も不要となる。鉛筆と紙というありふれた材料を使う
手法であるが、紙に鉛筆で描いた歪みセンサーや化学セ
ンサー等も報告されていている1)。鉛筆の芯はグラファ
イトと粘土、ワックスで構成されていて、その比率によ
りグレードが決まっている。Hはハードネス(hardness)、
Bはブラック(black)であり、その他にもFというグレー
ドもある。Fはファイン(fine)を示す。
2.実験方法
10Bのグレードの鉛筆を用意して、銀塩写真用印画紙
を塗りつぶした。フェムト秒レーザーの照射前後でラマ
ン測定による評価を行った。レーザー照射の実験条件は
入射口径を50 μm、出力は5 mWとした。また、レーザ
ーの走査スピードは毎秒50から1,000μmとした。レーザ
ー照射の最適化については参考資料(1)に詳しい。電気移
動度など電気測定については、膜厚が必要となるため、
鉛筆の塗りの厚さについて、紙の断面試料を用意して電
子線顕微鏡での観察を行った。
3.結果と考察
10Bのグレードの鉛筆によるレーザー照射前後のラマ
ン測定をレーザーのスキャン速度別に図1に示す。ラマ
ン測定では一般的に、グラファイトに近くなるとDピー
クが消えてGピークのみになり、グラフェンではG’ピー
クが現れる。この結果からスキャン速度が毎秒1,000μm
図 1 ラマンのスキャン速度依存性
図 2 鉛筆で塗りつぶした紙の断面の電子線
顕微鏡像
の時にG’ピークが確認され、グラフェンが成長している
ことが分かった2)。
電気特性評価のためにクロスセクション・ポリッシャ
ーを用いて、10Bの鉛筆で塗り潰した紙の断面を用意し
た。図2に紙の断面の電子線顕微鏡図を示す。この像に
より、電子線顕微鏡でも紙の繊維質まで綺麗に観察され
ることが分かった。鉛筆の塗りつぶしの厚さに関しても
2 μm程度と観察された。現在、これらの鉛筆で塗りつぶ
した紙の電気特性の評価を進めている。
参考資料
1) C. Lin et. al. Scientific Report 4 3812 (2013).
2) S. Kaneko et.al. Jpn. J. Appl. Phys. 55 1S01AE24
(2016).
3PS-3401
平成28年 神奈川県ものづくり技術交流会 予稿
PV ピークシフト法を用いた Plug-in リアルタイムホットスポット検出システムの検討
神奈川工科大学
工学研究科 ○飯塚
直明,落合
1. はじめに
近年,設置から年数が経過した太陽電池モジュール
の故障件数が増加している.故障の原因の一つに,
欠陥のあるセルに長時間影が生じると,セルの温度
が上昇し,セルの破壊や火災を引き起こすホットス
ポット現象がある.従来のホットスポット検査法で
は,検査時間や労力を要するなどの問題点がある.
先に,筆者等はパワーコンディショナ (PCS) に搭
載するホットスポット検出システムを提案した[1].
そこで,今回は既設の太陽光発電システムに対応し
た Plug-in 型のリアルタイムホットスポット検出シ
ステムを新しく提案し,その有効性を検討した.
2. 本システムの原理
本システムには,筆者等が以前開発した“PV ピー
クシフト法”搭載の MPPT ユニットを用いる[2].図
1 に開発したユニットの回路図を示す.本ユニット
は,昇降圧形 DC-DC コンバータで構成され,MPPT
アルゴリズムである“スキャン法”によって定期的
に I-V (電流-電圧) 特性を測定している.本システ
ムでは,
“スキャン法”による I-V 特性の測定を利用
して,次に述べる電流変化率を算出し,ホットスポ
ットの検出を行う.
図 2 に正常セルとホットスポットセルに影が生じ
たときの I-V 特性を示す.V1 = 10 [V] 時の電流値 I1
と V2 = 15 [V] 時の電流値 I2 の差を,短絡電流 I0 で
除した値を,(1)式のように電流変化率として定義す
る.図 2 において,電流変化率を求めると,ホット
スポットモジュールでは 0.1 以上となることを確認
している.この電流変化率の値を”スキャン法”によ
って算出し,ホットスポット検出を行う.
将喬,バハシュ
ホサーム,板子
一隆
太陽電池モジュールのホットスポット検出システム
について検討を行っていく予定である.
図 1. MPPT ユニットの回路図
図 2. I-V 特性(左:正常セル,右:ホットスポットセル)
図 3. システム構成図
電流変化率 = (I1 − I2 )/I0 ⋯ (1)
3. 実験結果
図 3 に実験を行ったシステムの構成を示す.Plugin ホットスポット検出ユニットで,電流変化率の算
出と MPPT 制御を行い,オシロスコープでホットス
ポットの発生を確認するシステム構成となっている.
図 4 に本システムの実験結果を示す.今回,電流変
化率の算出と MPPT 制御を 10 秒毎に行い,電流変
化率が 0.1 以上となった場合,ホットスポットが発
生していると判定し,5V を出力するように設定して
いる.ホットスポットセルに 2 秒時点で影を付加し
たところ,太陽電池出力が低下した.10 秒時点にな
ると,ホットスポットを検出したことで,5V を出力
し,MPPT 制御によって出力が回復した.31 秒時点
で影を取り除くと,太陽電池出力が上昇し,40 秒時
点でホットスポットフラグが 0V になった.
4. まとめ
本システムによって,ホットスポットの発生を判別
できることが実験により確認され,本システムの有
効性が示された.今後は,ストリングで構成された
図 4.実験結果
参考文献
[1]Kazutaka Itako, Bakhsh Hossam, Tsugutomo
Kudoh, and Qixin Huang. Proceedings of in
Industrial Electronics Society, IECON 2015-41st
Annual Conference of the IEEE, pp.1032-1036.
[2]Kazutaka Itako, Masataka Ochiai, Naoaki
Iiduka and Bakhsh Hossam. Proceedings of in the
ICEE 2016.
3PS-3402
平成28年 神奈川県ものづくり技術交流会 予稿
中波・短波帯における磁性体と導体の二層構造体の磁界シールド効果の解析的検討
青山学院大学大学院 理工学研究科
神奈川県産業技術センター 電子技術部
【はじめに】 近年,パワーエレクトロニクス機器内部
のインバータのスイッチングに起因する kHz 帯から
MHz 帯までの放射ノイズが懸念されており,そのシー
ルドが求められている.しかし、従来使用されている銅
板シールドを用いて 0.1 MHz で磁界シールド効果の目
安となる 30 dB を得るためには図 1 に示すように
250μm 以上の厚みが必要である.
そこで我々は銅よりも
30 MHz 以下において高いシールド効果を得ることを目
的として,低周波において高い磁界シールド効果が期待
できる磁性体と銅を組み合わせて二層構造体とすること
に着目した.本報告では,磁性体と銅の二層構造体の磁
界シールド効果を近傍磁界シールド評価法である KEC
法[1]を用いて解析的に検討した.
【電磁界解析モデル】図 2 に KEC 法の測定治具の電磁
界解析モデルを示す.同モデルは,シールド材料の両端
に配置した二つのシールデッドループアンテナを配置し
た構造となっており,送受信アンテナにそれぞれ入出力
ポートを接続している.本モデルにおいて,試料の有無
における透過特性の差分からシールド効果を算出する.
なお,本解析には三次元電磁界シミュレータ ANSYS 社
HFSS を用いた.
【磁性体の複素比透磁率】本報告では,用いられる磁性
体として Mn-Zn 及び Ni-Zn フェライトとイットリウム
鉄ガーネット(YIG)の 3 つを選択した[2].これらの複素
比透磁率を図 3 に示す.同図に示すように 0.1 MHz に
おいて 3 つの磁性体の比透磁率の実部は高周波になるほ
ど減少する傾向にある.このとき,50μm 厚の磁性体と
銅を重ねた二層構造体のシールド効果を解析した.
【解析結果】 図 4 に二層構造体のシールド効果の解析
結果を示す.比較対象として 100μm 厚の銅のシールド
効果も併せて載せている.同図より,Mn-Zn と Ni-Zn
を用いた二層構造体のシールド効果は銅に比べ 8 MHz
以下で高いシールド効果となり,特に 0.1 MHz において
銅に比べ Mn-Zn は 24 dB 程度,Ni-Zn は 15 dB 程度シ
ールド効果が高くなった.また,8 MHz 以上においては
銅よりもシールド効果が低下するものの、60 dB 以上の
シールド効果が得られ,広帯域に高いシールド効果が得
られることが分かった.一方で,YIG を用いた場合は銅
よりもシールド効果は小さい値を示した.従って,二層
構造体に用いる磁性体の比透磁率がシールド効果に寄与
しており,比透磁率の値によって銅よりも高いシールド
効果を得られることを示した.
【参考文献】
[1]松原 智樹,他, ``磁界シールド効果測定法(KEC 法)の
計算モデル,'' 信学技報, EMCJ99-105, pp.27-34,
Dec. 1999.
[2]畠山 賢一, 他,``初めて学ぶ電磁遮へい講座,'' 第 1 版,
第 4 章, pp.122-126, Apr. 2013.
○坂本 大,須賀
土屋 明久,菅間
良介,橋本
秀晃
修
図 1 近傍磁界における銅板のシールド効果
図 2 KEC 法の測定治具の電磁界解析モデル
図3
磁性体の複素比透磁率
図 4 二層構造体のシールド効果の解析結果
3PS-3403
平成28年 神奈川県ものづくり技術交流会 予稿
利得傾斜を変化できる並列 CR 回路装荷アクティブイコライザ
湘南工科大学 大学院 電気情報工学専攻
1. はじめに
音響や通信機器では信号の通過損失が、周波数・温
度に依存して変化する周波数・温度依存性が長年の悩
みの種であった(1)。周波数や温度に対して一定の通過
レベルを保つためには、それらの損失を補償するイコ
ライザ(2)が必要である。実際の音響機器や通信機器で
は周波数・温度依存性が様々であり、それぞれの機器
に応じてアダプティブに補償できるものが望ましい。
本研究では差動増幅器の利得に正または負の傾斜をも
たせ、さらにその傾斜を制御できるようにしたアクテ
ィブイコライザを開発したので報告する。
2.
アクティブイコライザの設計・試作・評価
VCC
VC
RL
○高木 宙明、伊藤 康之
図 3 電圧利得の計算結果
正または負の傾斜が得られているのがわかる。
次に、図 1 および図 2 の回路をユニバーサル基板、デ
ィスクリート部品を用いて試作し、電圧利得をそれぞ
れ測定した。結果を図 4 に示す。
RL
OUT+
OUTIN+
IN-
RB
CV
CV
RS
RS
RC
図 4 電圧利得の測定結果
図 1 正の傾斜を有するアクティブイコライザ
図 3 の計算結果と図 4 の測定結果を比較すると、若干
の差はあるものの良い一致が得られている。
VCC
RL
OUTIN+
CV
CV
RB
RB
RL
OUT+
3. まとめ
差動増幅器の帰還回路または負荷回路に並列 CR 回
路を装荷することにより正の傾斜または負の傾斜が得
られることを計算で示し、測定で確かめた。計算結果
と測定結果に若干の差が生じたが、ほぼイコライザの
特性は一致したことより、本研究で提案したイコライ
ザの有効性を確かめることができた。
IN-
VC
RS
RS
RC
図 2 負の傾斜を有するアクティブイコライザ
正または負の傾斜を有するアクティブイコライザの
回路構成を図 1 および図 2 に示す。それぞれの電圧利
得を Gvp または Gvn とすると、
|𝐺𝑣𝑝| =
|𝐺𝑣𝑛| =
𝑅𝐿
2𝑅𝑠
𝑅𝐿
2𝑅𝑠
∙ √1 + (𝜔𝐶𝑣𝑅𝑠)2
∙
1
√1+(𝜔𝐶𝑣𝑅𝑠)2
(1)
(2)
で与えられる。ここで RL および RS は負荷および帰還
抵抗、CV は可変容量を示す。CV をパラメータとし、電
圧利得の周波数特性を計算した結果を図 3 に示す。
参考文献
(1) S. C. Bera, IEEE Microwave and Wireless Component
Letters, Vol. 21, No. 7, pp. 344-346, 2011.
(2) K. W. Goossen, J. A. Walker, D. T. Neilson, J. E. Ford
and W. H. Knox, IEEE Photonics Technology Letters,
Vol. 12, No. 7, pp. 831-833, 2000.
(3) M. Morgan, T. Newton, T. B. Hayward, and T. Boyd,
2007
IEEE/MTT-S
International
Microwave
Symposium Digest, pp. 545- 548
3PS-3404
平成28年 神奈川県ものづくり技術交流会 予稿
可変角超音波探触子を用いた骨折部位の簡易超音波診断システムの基礎研究
桐蔭横浜大学
大学院
工学研究科
桐蔭横浜大学
医用工学部
医用工学専攻
○遠山 大貴
臨床工学科
1. はじめに
現在、骨折の診断にはレントゲンや X 線 CT を用い
竹内 真一
3. 可変角超音波探触子の受波測定
作製した可変角超音波探触子の受波波形測定を行い、
て検査を行っていることが多い。しかし、これらは検
測定した波形をフーリエ解析した。その結果を図 2 に
査の際、放射線によって人体に悪影響を及ぼす恐れが
示す。
ある。一方近年、LIPUS (Low Intensity Pulsed
Ultrasound) と呼ばれる低強度のパルス超音波を照射
する骨折部位の治癒促進技術が注目されている。
LIPUS は、スポーツ競技や練習の現場で使用される
ことが多い。そのため、人体への影響が少なく簡易的
な骨折部位の診断方法を研究する必要がある。本研究
では、超音波を用いて骨折の損傷部位を特定する技術
の開発に関する検討を行う。
2. 骨折の診断方法
図 2 受波波形(左)とフーリエ解析結果(右)
4. 表面波測定実験
本研究では、超音波を用いて発生させた弾性表面波
次に、物体の表面に表面波が励起しているかの確認
を利用して骨折部位の特定及び診断を行う。そのため
実験を行った。その設置図を図 3 に示す。今回、測定
に、一対の可変角超音波探触子を用いる。一方の可変
では距離による変化と入射角度の変化による受波波形
角超音波探触子から軟部組織を模擬する水を介して模
を測定した。距離測定では、近い距離では測定値が高
擬骨の表面に弾性表面波を励起するために超音波を照
く、距離が離れれば測定値が小さくなることが確認で
射し、他方の可変角超音波探触子を用いて、表面波か
きた。しかし、角度測定ではスネルの法則で求めた最
ら水中に漏れ出す漏洩表面波を受信する。励振用音源
適な角度から数度の範囲までが受信できると考えてい
から照射される超音波の周波数を変化させて骨折部を
たのだが、測定結果からピーク値を示す角度 22°に対
模擬したスリットの影響を受けて変化した波形を取得
して-6dB (±10°) の範囲まで受信できることが判明し
する。この方法により骨折部位とスリットの深さを評
た。その結果を図 4 に示す。
価する。この測定原理図を図 1 に示す。骨の表面に表
面波を励起させるためにはスネルの法則を用いてウェ
ッジの音速と骨の表面波音速の関係から超音波入射角
を決める。超音波入射角が決まることで骨の表面に表
面波を励起させることが出来る。今回、作製した可変
角超音波プローブを用いてその基礎実験を行う。
図 3 使用器具設置の様子
図4 入射角度変化による測定結果
図 1 骨折部位の簡易診断システムの原理図
5. 参考文献
加藤 友佳子ら, “信学技報,” US2012-107, p.107, 2012.
3PS-3405
平成28年 神奈川県ものづくり技術交流会 予稿
医療応用を目的としたコイル状ステータ超音波モータの基礎検討
-音響導波路の形状による検討上原 長佑 1,栗田恵亮 1,大関誠也 1,2,竹内真一 1
(1 桐蔭横浜大学大学院 工学研究科医用工学専攻,2 つくば国際大学)
1. はじめに
我々はこれまでに,血管内で使用可能な検査機器であ
る血管内超音波 (IVUS: Intravascular Ultrasound) へ
の搭載を目的とした小型モータとしてコイル状ステータ
超音波モータ (CS-USM : Coiled Stator Ultrasound
Motor) の開発を行ってきた[1-3].しかし,これまでに報
告された CS-USM は振動子とコイル状ステータが垂直
方向にあるため,実用化が困難である.
そこで本研究では,音響導波路の形状を変更すること
によって,実用化に向けた構造を目的としている.
2.CS-USM の作製
本研究では,単一振動子型の CS-USM を用いる.
CS-USM は音響導波路,振動子,コイル状ステータ,
ロータで構成されており,非常にシンプルな構造である
ため,小型に有利である.音響導波路には銅材料を使用
しており[4],φ 0.2 mm の丸線を用いた.音響導波路を
巻き付け用丸棒に 4 回巻き付けることで,コイル状ステ
ータとしている.その末端部には圧電セラミック PZT
振動子を取り付けて CS-USM としている。圧電セラミ
ック PZT 振動子 (富士セラミックス、C213 材) の厚さ,
幅,長さをそれぞれ,0.25 mm,1 mm,5 mm とした。
ロータとして外径 0.5 mm ,内径 0.3 mm の SUS304
製の中空パイプを使用している.
3.駆動実験
作製した CS-USM を用いて駆動実験を行った.はじ
めに,CS-USM の駆動周波数の選定を行うために,レ
ー ザ ド ッ プ ラ ー 振 動 計 (LDV: Laser Doppler
Vibrometer, Ono Sokki Co.,Ltd.; LV1710) を用いて,周
波数を 250 kHz~350 kHz の範囲で,コイル状ステータ
の振動速度を測定した.振動速度は,周波数 263 kHz に
おいて最大値を示した.
次に,駆動周波数の選定を行った.印加電圧 32.2 Vpp
において,周波数 250 kHz ~350 kHz の範囲を 1 kHz
毎に変化させて,デジタルタコメータを用いて回転速度
を測定した.周波数と回転速度の関係の測定結果を Fig.
1 に示す.駆動周波数を 263 kHz として,電圧を 32.2
Vpp から 2.6 Vpp まで降下しながら印加電圧と回転速度
の関係を測定した.その測定結果を Fig. 2 に示す.図中
の測定データは、10 回の測定値の平均値を示している.
印加電圧 32.2 Vpp で,平均値 1977 rpm を記録した.
Fig.1 Measured relationship between driving
frequency and revolution speed of the CS-USM under
test in this study
Fig. 2 Measured relationship between applied voltage
and revolution speed of the CS-USM under test in this
study
4.まとめ
実用化に向けた構造として,音響導波路に丸線を用い
ることで,振動子とコイル状ステータが直線上の
CS-USM の作に製を行った.印加電圧 32.2 Vpp ,周波
数 263 kHz の時平均回転 1977 rpm を記録し,IVUS
の目標回転数である 1800 rpm を上回ることができた.
参考文献
[1] 守屋 他, 信学技報, US2005-29, p.41, 2005
[2] 阿部 他, 音講論 (春), 1289-1290, 2013
[3] 大関 他, 音講論 (秋), 1303-1304, 2014
[4] 大関 他, 神奈川県ものづくり技術交流会 予稿
1PS-1209, Oct. 2016
3PS-3406
平成28年 神奈川県ものづくり技術交流会 予稿
血管内での使用を目的としたアウターロータ型 CS-USM の試作
-実用化に向けた小型化栗田恵亮 1,上原長佑 1,大関誠也 2,竹内真一 1
(1 桐蔭横浜大学大学院 工学研究科,2 つくば国際大学)
1. はじめに
現在医療分野では,低侵襲な治療方法として血管
内超音波検査 (IVUS: IntraVascular UltraSound)
が用いられている。機械走査式の IVUS では,血管
内で回転運動を行う必要があり,駆動源は体外から
動力伝達ワイヤを介してプローブ先端に動力を伝え
ている。しかし,湾曲した血管内では動力伝達ワイ
ヤに負荷がかかり,安定した回転を得られず,画像
歪などが発生してしまう問題がある。そこで,これ
らの問題を解決するために,駆動源を小型にし,カ
テーテル先端に設置することが提案された。
我々は,これまでに圧電セラミックスおよび水熱
合成法により製膜した PZT 振動子を用いてコイル
状ステータ超音波モータ (CS-USM: Coiled Stator
UltraSound Motor) の作製を行い,回転速度,トル
ク,及び音響導波路材の検討などの研究結果を報告
してきた[1-3]。しかし,これらの CS-USM は回転子
であるロータと駆動用の振動子が垂直に存在するた
め,血管内に挿入することは不可能であった。また,
ロータが固定子であるステータの内側で回転するた
め,画像化用探触子の取り付けが困難であると考え
られる。
そこで,本研究では,ロータと駆動用の振動子が
同軸上に存在し,さらにロータがステータの外側を
回転するアウターロータ型 CS-USM の作製を行っ
たので報告する。
2. 駆動原理
進行波が音響導波路上を伝搬するとき,音響導波
路表面上の粒子の軌跡は楕円を描く。回転子が与圧
によって音響導波路に押さえつけられている状態で
ある時,音響導波路表面に発生した粒子の楕円運動
によって回転子を引掻くような運動が生まれ,発生
した摩擦力によって回転子を進行波とは逆方向に駆
動させる[4]。CS-USM では音響導波路をコイル状に
したものをステータとして使用するためロータをス
テータの内外どちらにも配置することが可能である。
3. 実験
作製した CS-USM を用いて駆動実験を行った。
まず,振動子に 16 Vpp の正弦波信号を入力し,入力
信号の周波数を徐々に変化させた。その時の音響導
波路表面の振動速度をレーザドップラ振動計
LV-1710 (小野測器社製) を用いて測定した。その結
果 305 kHz で振動速度が最大となることが分かっ
た。その結果から入力信号の周波数を 305 kHz とし
て,設定電圧の変化における回転数の変化を測定し
た。測定方法として設定電圧を上昇させていく場合
と降下させていく場合の 2 通りで測定を行った。測
定結果を Fig.2 に示す。
Fig.2 設定電圧と回転数の関係
4. まとめ
今回作製したアウターロータ型 CS-USM は最大
回転数 1007 rpm であった。また,設定電圧 11 Vpp
から 13 Vpp の間では降下方向と上昇方向の測定で,
回転数に違いがみられた。さらに,ロータの位置に
より回転方向やロータの軸ずれ方向が変化すること
が目視により確認できた。
今後の研究としてこれらの問題を解明するととも
に安定した回転が得られるよう工夫を施し,実際に
水中での駆動を行い画像化を行うことを目標とする。
参考文献
[1] 阿部 他, 音講論 (春), 1289-1290, 2013
[2] 大関 他, 音講論 (秋), 1303-1304, 2014
[3] 上原 他, 音講論 (春), 1233-1234, 2016
[4] 高 塚 公 朗 , 福 井 工 業 大 学 研 究 紀 要 , Vol.
30,pp.113-120, 2000
Fig.1 駆動原理
3PS-3407
平成28年 神奈川県ものづくり技術交流会 予稿
電源回路開発におけるシミュレータの活用
神奈川県産業技術センター 電子技術部
1. はじめに
パワー・エレクトロニクスの分野において、スイッチ
ング電源回路を中核とした技術がますます重要になって
おり、パワー半導体、インダクタ、コンデンサがキーデ
バイスとなっている 1)。
DC-DC コンバータのようなパワー・エレクトロニク
ス回路の場合は、実物を使ってカット&トライを繰り返
すことがあり、動作しない場合は途中で開発を中断する
ケースもあり、このような問題の解決にシミュレーショ
ンによる推測が有効である 2)。
特に電源用 IC の PWM 周波数が可変の場合は、外部
仕様が決定されても、周波数ごとにインダクタンスの推
奨値が異なり、インダクタンスに関しては無数の解が存
在するので、機械的にインダクタンスを決定することが
できない。
このような場合、電源用 IC の内部回路が公開されて
いればインダクタ選定は容易になるが、内部回路は非公
開でブラックボックスなので、特にシミュレータによる
推測が必要とされる。
2. 外部仕様とインダクタンス値
外部仕様は、入力電圧 15 V、出力電圧 5 V、定格電流
0.25 A、電源用 IC は代表的な MC34063A を用いた。
この電源用 IC に関わらず、インダクタを使ったスイ
ッチング回路に全般では、
インダクタ定格電流は、
概ね、
外部仕様で決めた定格電流の 3 倍以上の余裕が必要なの
で、インダクタの定格電流は 0.75 A 以上が必要となる。
インダクタの場合、同じ定格電流では、インダクタン
スと大きさやコストが比例するので、インダクタンスが
小さいほど大きさやコストが削減できるが、あまりにイ
ンダクタンスが小さいと出力電圧の低下や電源用 IC の
発熱増加の弊害等の問題点が発生する。
3. シミュレータによる検証
シミュレータで検証する回路は図 1 で、インダクタン
ス別に出力電圧、リップル電圧、IC 電力損失を検証する。
DIP 版 MC34063A のチップから雰囲気の熱抵抗は
100 ℃/W、チップから電極の熱抵抗は 40 ℃/W となる。
インダクタンス別のシミュレータの結果は表 1、イン
ダクタンス別の電源用 IC 温度上昇は表 2 となった。
出力電圧とリップル電流に関しては、インダクタンス別
での差異は少ないが、インダクタンスを下げると温度上
昇するという結果が得られた。
MC34063A の場合は放熱処理を前提としていないが、
特別に温度を下げたい場合は、電極からの放熱処理で温
度を下げることが可能だが、通常は行わない。
一般的には温度上昇は 40 以下とされるが、顧客より、
要求される状況によって温度上昇の上限やリップル
○三岩 幸夫
図 1 MC34063A を使った電源回路図
表 1 インダクタンス別のシミュレータの結果
インダク
出力電圧 リップル IC 電力損失
タンス(L1)
電圧
1 mH
5.010 V
0.055 V
0.192 W
0.33 mH
5.024 V
0.207 V
0.207 W
0.1 mH
5.041 V
0.16 V
0.249 W
0.047 mH
5.036 V
0.18 V
0.304 W
0.015mH
5.030 V
0.20 V
0.501 W
0.0068 mH
5.027 V
0.20 V
0.816 W
表 2 インダクタンス別の電源用 IC 温度上昇
インダク
IC の温度上昇
IC の温度上昇
タンス(L1)
(放熱処理せず)
(電極より放熱)
19.2 ℃
7.68 ℃
1 mH
20.7 ℃
8.28 ℃
0.33 mH
24.9 ℃
9.96 ℃
0.1 mH
30.4 ℃
12.16 ℃
0.047 mH
50.1 ℃
20.04 ℃
0.015 mH
81.6 ℃
32.64 ℃
0.0068 mH
電圧の上限も異なるので、インダクタンスの下限値は個
別のケースによって判断することとなる。
4. おわりに
電源用 IC で動作するインダクタンスには大きな幅が
あり、最適値がわかりにくいが、シミュレータで推測す
ることにより、
インダクタの選定のハードルが下がった。
文献
1) “トランジスタ技術2011 年5 月号”,
CQ 出版社,
P. 92.
2) “トランジスタ技術 2013 年 10 月号”,CQ 出版社,
P. 111.
※発表タイトルを変更しました。
3PS-3501
平成28年 神奈川県ものづくり技術交流会 予稿
簡易 STC を用いた搭乗型倒立モビリティの VSS 適応制御
東海大学大学院
工学研究科
東海大学
情報理工学部
近年、セグウェイを代表としたパーソナルモビリテ
ィが多く見受けられる.これらのパーソナルモビリティ
は不安定系のものが多く,コンピュータによる安定化
制御が必要不可欠である.本研究では,車椅子型の自動
二輪車ロボットを構成し,対象の物理パラメータを未知
とした制御設計を行い適応安定化制御することを目的
としている.
2.制御対象
本研究で使用する倒立モビリティの実機本体を Fig.1
に,運動モデル図を Fig.2 にそれぞれ示す. Fig.2 より導
出した運動方程式を式(1)に示す.
z
zv
M w : 車輪の質量 [ kg ]
M b : 振子の質量 [ kg ]
L : 振子の長さ [ m ]
J m : モータ慣性モーメント [ kgm 2 ]
xv
(r , )
yv
J
L
l
: ギア比
g : 重力[ m / s ]
W : 車輪距離 [ m ]
:トルク[ Nm ]
k :トルク定数 [ Nm / A]
2
( xg , y g , z g )
l
r
平田
弘志
ArS 2
0 ArC
J1
0
0
, C q 2 AJ SC , G 0 ,
M
JJ
0
b
b
2
b
AJ2 SC2
ArC 0 AJ3
ArgS
2 d m xv
R/2
R/2
E1
r
2 2
D
q
b
(W / 2) d m , Eb E2 , N bu WR / 4 WR / 4
0
0
0
0 l
(1)
H1 : det M / Ct Ct Rrk / 2
T
Y [r xv
T
[ H1 p1 / Ct
sgn(l ) sgn(r )]
p2 / Ct
p3 / Ct
p4 / Ct ]
3-2.旋回系
式(2)より,旋回系の方程式は式(5)となる.
J 4 ( B 2 2d m ) u2
(5)
sc 2 :切換関数を次式のように定義する.
e2 : ref , r : ref h2 e2 , (h2 0) , sc 2 : r e2 h2 e2
] ,
T [ H 2 W 2 2 w / Cr ]
i Y T ˆ k v sat ( S c / ) k v 0
T
ˆ ˆ 1 ˆ 2 ˆ 3
ˆ n
| sc |
sgn(sc )
sat ( sc ) :
|
s
sc |
c
(7)
ゲイン :境界層幅
:適応則ゲイン.
目標角 r f , ref が安定に与えられるとき, t で sc 0 と
なり,振子角 及び旋回角 は目標角 r f , ref に追従する.
A : R2 / 2, r : Mb L, S : sin , C : cos
E : R{E sgn( ) E sgn( )}/ 2
r
E2 : WR{El sgn(l ) Er sgn(r )}/ 4
式(1)を線形化すると式(2)となる.
0 xv Ar
2 x
R{E l sgn(l ) E r sgn(r )} / 2 u1
2 2 m v
J 4 0
W
/
4
m
WR{E l sgn( l ) E r sgn( r )} / 4 u 2
Arxv AJ 3 Arg 0 rxv J 3 rg 0
(2)
3.VSS 制御系設計
3-1.並進系
式(2)より,並進振子系の方程式は式(3)となる.
d e tM P1 P2xv P3 s gn
() P4 s g n(r ) ru1
det M J 1 J 3 Ar 2 , det M 0 , P1 J 1rg ,
(4)
T
Y H1sc i1 w1
k v :VSS
J 4 : (W / 2)2 (M w R2 J w 2 J m ) AJ , JJ : AS 2 J 2 J 4
r
式(3)に対し,不確定外乱 w1 を考慮すると式(4)となる.
パラメータ適応則
ˆ k aˆ 1YS c , ( 0)
u1
u
2
0
J1 : M b / 2 M w R2 J w 2 J m , J 2 : M b L2 , J 3 : M b L2 J
l
e1 : r f , r : rf h1e1 , (h1 0) , sc1 : r e1 h1e1 ,
3-3.VSS 適応則
Fig.2 モデル図
実機本体
:振子回転角度, rf :目標角, e1 :誤差, r :参照速度,
sc1 :切換関数を次式のように定義する.
Y T [r
y
M ( ) C ( , ) G ( ) D E () Nu
J 1
0
毅
式(5)に対して不確定外乱 w2 を考慮すると式(6)となる.
T
(6)
Y H 2 sc 2 i2 w2 H 2 J 4 / Cr Cr WRk / 4
p : 振子粘性摩擦 [ kgm 2 / s ]
R
r Mw
Jw
J : 振子慣性モーメント [ kgm 2 ]
w : 車輪粘性摩擦 [ kgm 2 / s ]
J
Mb
Jm
J w : 車輪慣性モーメント [ kgm 2 ]
J : 旋回慣性モーメント [ kgm 2 ]
x
z
l
稲葉
:旋回角度, ref :目標角, e 2 :誤差, r :参照速度,
R : 車輪の半径 [ m ]
y
1
勇
P2 r 2 w , P3 RrE 1 / 2 , P4 RrE 2 / 2
1.はじめに
Fig.1
○竹田
4.STC 設計
式(2)の車輪系方程式
(8)
rxv J3 rg 0
において r f とみなし を r f と置き換え,状態方程式
で表すと式(9)となる.
xv 0 0 0 xv 1
( 0 g , 1 J3 / r ) (9)
rf 0
rf 0
0
0
1 rf 0 rf
0 rf 1
上記のシステムにおいて, パラメータ 1 を逐次推定し
ながら次の評価関数 J
J
0
T
( xT Qx rf Rrf )dt, (Q 0, R 0) , xT : xv rf
rf
(10)
を最小にする Fo を制御周期毎に更新する.
(3)
rf FoT x ,
FoT : [ f1
f2
f3
f4 ]
以上より,振子系の安定化が達成される.
(11)
3PS-3502
平成28年 神奈川県ものづくり技術交流会 予稿
ハンドル操作によるジャイロアクチュエータを搭載した 2 輪車の自立走行制御
東海大学 工学研究科 電気電子工学専攻 今井 寛人
1 はじめに
近年、自動走行する自動車が普及し、この先、世の中
で主流となることが予想される。しかし自動車の場合、
4輪であるために狭い道は通ることができず、機動性に
も欠ける。本研究では自立走行が可能な 2 輪車の開発を
提案する。このような 2 輪車の実現により狭小空間への
侵入も可能となる。しかし低速走行では安定性が著しく
低下する欠点がある。これまでにジャイロをアクチュエ
ータとして利用した二輪車の開発を行っており、停止時
かつ無人であっても姿勢を安定させることができるシス
テムの開発を行っている。しかし、現段階のジャイロア
クチュエータは重量と電力消費が大きく、解決策が望ま
れている。そこでハンドル操作によって発生する遠心力
の利用することを本研究では提案する。遠心力を適切に
用いることでジャイロアクチュエータによる負担を減ら
すことができ、二輪車で様々な動作が実現できる。例え
ば、一般的に走行中における姿勢安定は人が重心移動と
二輪車のハンドル操作を行うことによって達成している。
このような動作は、ジャイロアクチュエータによって重
心移動を実現すれば、無人機でも可能である。本研究は
ジャイロ効果とハンドル操作による自立走行制御の実現
に向けての基礎研究と位置付け、報告を行う。
2 ジャイロアクチュエータ
本研究では図1のような実験機を使用する。
ジャイロユ
ニットに搭載されているセンサーで車体の傾き角度を計
測し、
図2のようなジャイロアクチュエータ内のフライホ
イールを高速回転させ、傾転させることでトルクを生み
出し、車体の自立及び重心移動を行う。
ジャイロユニット
図 1 実験機
図 2 ジャイロアクチュエータ イメージ図
3 ハンドル操作による自立走行
以下の図 3 のブロック線図のように車体の角度、角速
度に応じて PD 制御を行う。
また実験機のパラメータは図
4 のように示す。
図 3 ハンドル操作ブロック線図
名称
ジンバル角度
記号[単位]
2
θ g [m/s ]
名称
記号[単位]
前輪角度
[deg]
車体速度
v [m/s ]
前輪目標角
r [deg]
車体角度
[deg]
車体角速度
[deg/s]
図 4 実験機パラメータ表
4 動作検証
本実験は,ハンドル操作による自立走行を確認するた
め,車体速度が実験機の最高速度に達した状態でジャイ
ロアクチュエータのジンバル角度を固定し,ジャイロ効
果によって自立させない状況とする.その後,ハンドル
操作のみによって自立走行をさせる.以下にそのグラフ
を示す.(上から車体角度,ジンバル角度,前輪角度)
図 5 実験結果
5.おわりに
本報告では、ハンドル操作により発生する遠心力によ
って自立走行が可能であることを確認した。今回、ハン
ドル操作による検証実験のみの報告となってしまったが
今後、ジャイロアクチュエータにより重心移動を行い、
二輪車の自立走行制御に関する研究を進めていく。
6.参考文献
大内・小谷「ジャイロアクチュエータを用いたバイク
型二輪車の安定制御」日本機械学会論文集 vol.81 p.15
3PS-3504
平成28年 神奈川県ものづくり技術交流会 予稿
画が出ないカメラ、センサで監視カメラ、IoTカメラに省エネで貢献
株式会社 SEtech
関根 弘一
【要旨】高齢化社会での見守り、安心安全な社会の実現に向けて、監視カメラの需要は高まってきている。監視カメ
ラの能力アップ(解像力、画像処理技術(顔認証)
)に伴い、人ごみの中からの人物の抽出とか高機能なカメラが出現
してきている。その設置場所も固定設置箇所だけでなく、ドライブレコーダーやドローン、飛行船といった稼動物体
への普及も進んでいる。しかしながらこれらの監視カメラに使用されるイメージセンサは既存の汎用品を使わざるを
得ないため、ひたすら後段処理回路で画像処理技術を競っているに過ぎない。今後、映像で記録して保存するという
単純な監視用途から、IoTにおけるエンドデバイス、ビックデータ取得デバイスに姿を変えることが予想される中、
“既存のイメージセンサしか選択肢が無い状況で良いのか?”との疑問を抱き、判断機能を持った新規センサのコン
セプトの提案をする。本提案により、監視カメラの問題点を解消し、IoTカメラに省エネで貢献する。
【現状の監視カメラの問題点の把握】
監視カメラの現状の調査のために、13業種(介護、
医療、スーパー、美容健康機器、農業、車載電装、カメ
ラメーカー、電機メーカー、商社、大学、警備会社 etc.)
の39社を廻って実情を見てきた所、現状の監視カメラ
には次の6つの課題が有ると感ずるに至った。
①モニターし辛い(カメラ台数分画面が分割される)
②プライバシーが無い(設置場所でもめる)
③カメラサイズが大きい(嫌がって外される)
④高消費電力(リアルタイムの高度な画処理)
⑤情報量が多い(24時間動画で録画、定期的収集要)
⑥値段が高い
(沢山付けたいが値段とモニターで困難)
【画が出ないカメラ、センサの提案】
上記の課題の発生起源を考えるに、これらは画が出る
カメラ、センサしか存在していない現状に辿り着いた。
即ち、原状は画が出ているので、表示せざるを得ない、
プライバシーも無い、情報量が多い。また後段処理回路
で画像処理するので大きく、値段が高く、高消費電力。
これらの問題点の解決方法は“カメラ、センサから画
を出さないこと!”との着想に至る。具体的には下図。
画が出ないといっても、必要時には画像表示を行う。
具体的には、センサ、カメラ内部で特定領域での動きの
判定を行い、①動きがなければ画を出さず、②後段シス
テムの電源を OFF する。ここで特定領域とは、例えば
介護の現場でドア付近である。
③動きが有った場合には、
動きベクトルや、画像表示をする。④また動き判定の後
段処理回路を省略する。
これらの特長は特許登録された。
【画が出ない方式での問題解決】
この必要な画像だけが表示されることで、観察すべき
画像の数が減り、
拡大表示できてモニターが容易になる。
画が出ないセンサの4つの特長と解決策で、下表のよ
うに従来の監視カメラの6つの問題点は一気に解決する。
画が出ないセンサの上表の特長を活用し、今後の伸び
が期待されるIoTカメラにて超省エネで貢献していく。
【謝辞】
NEDOのH27年度研究開発型ベンチャー支援事業
の起業家候補(スタートアップイノベーター)に採択さ
れ、
本補助金を活用し機能確認用カメラを試作中である。
3PS-3505
平成28年 神奈川県ものづくり技術交流会 予稿
イーサネット通信による高精度時刻同期
ネットワークアディションズ株式会社
Interrupt Timer
Interface connect
Reference timing
Pulse
Generator
PREG
Time Stamper
Timestamp
PRBM
PTBM
PRPC
PTPC
PPID
PSEL
SyncPulse OUT
External
PHY
MAC
GMII
PTRIT
PTRI
PTRIR
Packet Controller
FPGA
2.イーサネット通信の高精度時刻同期
図 2
IEEE1588-2008 で規定する PTP(Precision Time
Protocol)をイーサネットに実装して、イーサネッ
ト通信による同期精度を評価した。その結果、限定
的な環境下に於ける数値ではあるが、約±10 ナノ秒
の極めて高い時刻同期の精度を得ることができた。
その評価環境を、図 1 に示す。市販の評価ボード3
に、自社開発の PTP ソフトウェアとハードウェアを
実装して、OC(Ordinary Clock)スレーブ機能を
実現するとともに、パソコンに市販の IEEE1588
PTP PCIe 同期カードを搭載、それをマスタとして
時刻同期精度を評価した。
イーサネットケーブル
interrupt
CPU
PCRI
広く普及した、イーサネット1を用いたネットワー
クを、更に広範なアプリケーションに適用するため
のキーワードが”同期”である。その”同期”を実現す
る手法の一つが”時刻同期”である。それは、ネット
ワークに接続される各装置に、精度の高い時計(時
刻カウンタ)を持たせる方法である。その精度を1
マイクロ秒以下の高い値とすることで、イーサネッ
トの適用を、映像・音声を扱う放送分野、工作機械・
ロボットといった FA(Factory Automation)分野、
移動体通信分野等へ拡大させることが期待できる。
IEEE 2は、ネットワークの高精度時刻同期を実現
するための国際標準規格 IEEE1588 version2 を、
2008 年に策定した。
同期を実現できた。今後は、その同期安定性を高め
る等の改善を行っていく。
PMAI
1.イーサネット通信と時刻同期
浅野篤哉
PTP ハードウェアの構成
pwDadBerry
dbMain
dbStateController
dbDiag
dbTable
dbOption
DataSet
dbManagement
ConfigData
dbTransparent
dbClockController
dbMessageProc
ClockDriver
PacketDriver
初期化
メッセージ送信
メッセージ受信
時刻設定
時刻参照
時刻補正
タイマ制御
タイマ割り込み 同期信号制御
オシロスコープ
dadBerry-Core
図 3
スレーブ側
同期信号
PTPパケット
マスタ側
1pps 同期信号
IEEE1588 PTP
PCIe同期カード搭載パソコン
市販評価ボード
評価環境
図 2 に、評価ボード搭載 FPGA4に実装した PTP
ハードウェア論理(dadBerry-Core)の構成を示す。
図 3 に、評価ボード搭載 FPGA 内の CPU に実装
した PTP ソフトウェアモジュールの構成を示す。
図 4 に、評価で得られた時刻同期の精度(オシロ
スコープ波形)を示す。上段がマスタ側、下段がス
レーブ側 1pps 同期信号の立上り波形である。オシ
ロスコープをトレースモードで動作させているので、
下段波形の振れ幅が同期精度となる。ここに示す評
価結果の通り、イーサネット通信による高精度時刻
2
3
4
同期精度(±12ns)
マスタ側同期信号
図 1
1
PTP ソフトウェアの構成
「イーサネット」、
「Ethernet」は富士ゼロックス社の登録商標
Institute of Electrical and Electronic Engineers
Xilinx 社製 Kintex-7 FPGA KC705 評価ボード
Field-Programmable Gate Array
スレーブ側
1pps 同期信号
図 4
時刻同期の精度
3.時刻同期ネットワークの展望
今後、ネットワークの同期化が進むと予想されて
いる。IEEE1588 は、国際標準規格として、その中
核を担うであろう。放送系の SMPTE5 ST 2059-2、
通信系の ITU6-T G.8265.1、電力系の IEEE C37.238
といった IEEE1588 関連規格が策定され、市場ニー
ズの高まりとともにその普及環境が整いつつある。
5
6
Society of Motion Picture and Television Engineers
International Telecommunication Union
© Copyright 2026 Paperzz