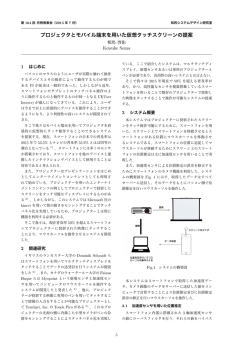
ソーラーカーのモータ消費電力低減のための基礎研究 ○片岡敏則(九州東海大学大学院工学研究科) 八戸和男、清田英夫、佐松崇史(九州東海大学) 1. はじめに ソーラーカーは、太陽光をエネルギー源として走 行する電気自動車であり、排出物を一切出さないク リーンビークルとして注目されている。九州東海大 学では、太陽光・太陽熱利用研究の一環としてソー ラーカープロジェクトを設立し、学内外でのクリー ンエネルギー利用研究の啓蒙的・奨励的役割を果た している。1998 年よりソーラーカーレースに出場し ており、その過程で遭遇する様々な技術的諸問題を 調査し、研究を行うことにより数々の実績や研究成 果をあげている 1) 2)。 2001 年から専用機器を使って走行性能データを 詳細に収集し、エネルギー解析を行っている。これ は省エネルギー研究分野において、エネルギー利用 効率を追及していくための feasibility study として も有効である。今回は、2002 年に出場したレースで の減速比設定の評価を行い、また、アクセルコント ロールの自動制御化を目的とした走行電力制御方法 の検討を行い、最適な制御方法を検討した。 プ)の競技コースである、秋田県大潟村のソーラー スポーツラインで 1 周 31km の往復直線コースであ る。JISC は、1 日約 8 時間、3 日間で計 25 時間(今 年は天候不順のため 22 時間に短縮)を走破する耐 久ソーラーカーレースである。 Table 1 車輌諸元 全長×全幅×全高(mm) 5250×1860×1000 車輌重量(kg) 250 車体・カウル CFRP・ケブラー 車輪配置 前 2 輪・後 1 輪 太陽電池 バッテリー メーカー Gochermann タイプ 単結晶シリコン 出力(kW) 1.195 変換効率(%) 16.5 メーカー・型式 日本電池・SB-A24 タイプ 鉛 電圧(V)/容量(Ah/5HR) 配置 総容量 (Wh,(5HR)) モータ Photo. 1 12 / 32(単体) 7 直列 2688 メーカー・型式 エプソン・SCM-4 タイプ DC ブラシレス 最高回転数(rpm) 5000 最大トルク(N-m) 14.7 駆動方式 後輪チェーンドライブ 空気抵抗係数 Cd 0.195(実測値より概算) 最高速度(km/h) 85(減速比 4.5) 九州東海大学 ”Nextage” 2.測定方法 測定データは、バッテリー電圧、バッテリー入出 力積算電流、ソーラーパネル発電積算電流である。 走行データの収集には、T&T 社製の Modem Logger を用いて 5 秒に 1 回の間隔でデータを測定し、携帯 電話から、ピット(受信者)のノート PC へデータ を転送した。 3. 走行データの分析 今回の実験に使用した九州東海大学のソーラーカ ー ”Nextage” 2002 年モデルの主な車輌スペックを Table 1 に示す。 実験に使用したコースは、2002 年に開催された JISC(全日本学生ソーラーカーチャンピオンシッ 3.1 減速比による走行電力の変化 駆動モータからの動力を伝達する減速比の選択は モータ消費電力と走行タイムに影響する。コースに 設定されている 6 箇所の速度制限区間を除くとほぼ 平坦な直線路である。そのため、巡航走行時にモー タ効率の高い領域で使用できるよう減速比の理論計 算を行った。また、レース期間中の天候状態により 減速比の変更を行ったので、減速比の違いによるコ ース 1 周あたりの平均時速とモータ消費電力との関 係について検討した。 3.1.1 減速比計算 コース 1 周の目標タイムを 30 分と設定し、 加速、 減速区間を加味すると、巡航速度は 75km/h となる。 使用したモータは、4000rpm 前後で 1.96N-m 前後 のトルクで駆動している場合が最も効率が良い 3)。 これよりモータ負荷トルク導出の理論式を用いて減 速比 i を求める。 速度制御法では、加速時に最高速度約 75km/h ま で加速した後、惰性走行を行った。そして 60km/h まで車輌速度が低下すると再び加速を行った。 5000 T=ρCDAV2D / 4i (1) モータ消費電力(W) T :モータ負荷トルク ρ :空気密度 CD :空気抵抗係数 A :前面投影面積 D :タイヤ外径 V :車輌速度 ⅰ :減速比 モータ平均消費電力(W) 1100 減速比 4.5 減速比 4.8 減速比 5.54 900 速度制御法 3000 2000 1000 0 -1000 この式より減速比i=4.6 が求められる。これより 歯数の構成上、予想される最適な減速比を 4.5 とし た。また、様々な走行状況に対応するため、この減 速比周辺のものを数種類設定した。 3.1.2 測定結果 減速比の違いによる平均時速とモータ消費電力と の関係を Fig. 1 に示す。3 つの減速比の中で最もモ ータ消費電力が少ない減速比は 4.8 の時である。理 論値に対し、実測値の適正減速比 4.8 との差は、空 気抵抗力を主とした走行抵抗や機械的損失が実測値 では理論値より多く発生しているものと考えられ、 今後改善していきたい。 1000 電力制御法 4000 -2000 0 60 Fig. 2 の区間における平均時速が同じ場合でのモ ータ消費電力量を比較すると、電力制御法は 49.6Wh、速度制御法は 50.6Wh であり、同程度の 消費電力量となった。 次に、走行制御法による周回時間、モータ平均消 費電力、消費電力量の比較を Table 2 に示す。各走 行制御法での消費電力量の変動の主な要因は、加速 から巡航速度に至るまでのアクセル操作によるもの であった。そのため、今後より効率的な走行を行う ためにはアクセル操作の自動制御化を実現していき たい。 走行制御法 600 電力制御 500 50 55 LAP speed (km/h) Fig. 1 減速比によ る 1周の平均時速とモータ消費電力との関係 180 Fig. 2 走行方法の違いによるモータ消費電力の比較 700 45 120 Table 2 走行制御法による消費電力量などの比較 800 40 時間(s) 60 3.2 走行制御法の検討 走行時のモータ消費電力は、ドライバーによるア クセル操作方法が異なり、モータ消費電力に影響す る。そのため、次の 2 つの走行制御法を行い、比較 を行った。 (1) 電力制御法 巡航走行時のモータ消費電力を一定にする。 (2) 速度制御法 車輌の最高速度まで加速した後、惰性走行を行 い、ある一定の速度まで車輌速度が低下すると再 び加速を行う。 3.2.1 測定結果 上記(1)の電力制御法と(2)の速度制御法について、 同一区間と時間の場合のモータ消費電力の推移を Fig.2 に示す。 電力制御法では巡航速度 70km/h まで加速し、そ の時のモータ平均消費電力 1135W 前後で一定して 走行した。 速度制御 周回時間 平均消費 消費電力量 (分’秒) 電力(W) (Wh) 33’00 864 475 33’09 885 489 37’37 701 432 38’25 928 594 4. おわりに (1) JISC コースの最適な減速比は 4.8 付近である。 (2) 走行消費電力を低減させていくためには、加速 中のアクセル操作を安定させなければならない。 (3) 今後の課題として、走行抵抗を明確に把握し、 低減に努めなければならない。 参考文献 1) 渡邊嘉徳, 清田英夫, 佐松崇史, 高木豊:ソーラーカー 初号機の設計・製作及びテスト, 九州東海大学産業技術研 究所所報, No.14 (1998) pp.69-89. 2) 片岡敏則, 八戸和男, 清田英夫, 佐松崇史:ソーラーカ ーの駆動系セッティングとその評価, 日本産業技術教育 学会第 15 回九州支部大会講演要旨集(2002) pp.25-26. 3) 橋口盛典:図解 ソーラーカー, 山海堂 (1993) 問合せ先:九州東海大学・八戸 和男 ℡.096-386-2678 [email protected]
© Copyright 2026 Paperzz