確率解析の技法
大谷俊介
平成 27 年 2 月 8 日
1
目次
1
2
3
確率論の基礎
1.1 確率変数と確率分布 . . . . . . . . .
1.2 モーメント母関数と特性関数 . . . . .
1.3 確率変数の独立性 . . . . . . . . . . .
1.4 大数の法則と中心極限定理 . . . . . .
1.5 ランダムウォークからブラウン運動へ
1.6 演習問題 . . . . . . . . . . . . . . . .
ブラウン運動と確率積分
2.1 ブラウン運動と 3 つの伊藤ルール
2.2 伊藤の補題 . . . . . . . . . . . .
2.3 確率積分 . . . . . . . . . . . . . .
2.4 演習問題 . . . . . . . . . . . . . .
確率微分方程式
3.1 伊藤の補題の拡張 . . . . .
3.2 ケーススタディ . . . . . .
3.3 ノイズ抽出 . . . . . . . .
3.4 偏微分方程式の初期値問題
3.5 演習問題 . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
3
4
5
8
9
11
.
.
.
.
12
12
15
16
22
.
.
.
.
.
24
24
24
26
28
34
A Dirac のデルタ関数の計算
37
B 確率変数と確率分布
B.1 確率空間 (Ω, F, P ) の構成 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.2 収束性についての補足 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
38
38
40
C 条件付き確率とマルチンゲール
C.1 条件付き確率 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
C.2 フィルタ付き確率空間 {Ω, F, P, Ft } とマルチンゲール . . . . . . . . . . . . .
43
43
45
D ブラウン運動の微分不能性
49
2
確率論の基礎
1
幸運とはチャンスに出会う準備ができているということである。
足早に基本事項をまとめます。ここでのポイントはガウス分布に従う確率変数を対象とし
た期待値、分散、共分散の計算と独立性の判定です。最後に、中心極限定理を紹介し、二項
分布からブラウン運動が構成される様子を見ていきます。
1.1
確率変数と確率分布
「正しいコインを投げて表が出る確率は 12 である」と言ったように、
「事象」と「確率」を
直接結びつけて考えることを一旦やめ、両者の間に確率変数という概念を導入します。
例えばコインを投げて表が出る確率を直接論じるのではなく、表に X = 1、裏に X = 0 を
対応させ、P (X(表) = 1) = 21 というように、事象と対応する変数 X (確率変数)を導入す
るわけです。
全事象の集合Ω
ボレル集合 B
実数 R
確率測度
事象ω
PX(B)=P(ω)
確率変数 X(ω)
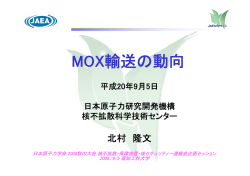
図 1: 模式図:ω = X −1 (B) より P (ω) = P (X −1 (B)) = P ◦ X −1 (B) ∈ [0, 1]
図のように事象 ω に対応する確率変数 X(ω) ∈ B を導入します。1 B(として適当な集合)
はボレル集合と呼ばれるものです。さらに事象 ω に対応する確率(確率測度)を
PX (B) = P (X ∈ B) = P ({ω | X(ω) ∈ B})(= P (ω))
のように表します。確率測度 PX (B) の集合を確率分布と呼び、確率変数と確率分布の関係
を「確率変数 X は 分布に従う」のように表現します。確率変数 X の従う確率分布、あ
るいは累積分布関数 FX (x) を次で定義します。
FX (x) = P (X(ω) ≤ x)
特に X が連続変数である場合、これに付随して次の概念も導入します。
確率変数と確率分布
定義 1.1
確率変数 X が x から x + dx までを取る確率が fX (x)dx で与えられるとき、fX (x) を確
率密度と呼び、次が成り立つ。
∫ ∞
fX (x)dx = 1
−∞
定義で与えられた積分式は『確率を全て足し合わせれば 1 になる』ことに対応し、これに
応じて期待値・分散が定まります。ポピュラーな例として
[
]
1
(x − µ)2
fX (x) = √
exp −
2σ 2
2πσ 2
1
サイコロを振る際に ω =(偶数の目が出る)とすると、B = {2, 4, 6} であり、X(ω) = 2, 4, 6 となります。
3
∫
と取ると
∞
−∞
fX (x)dx = 1 をみたしており、確率密度として機能することがわかります。こ
の fX (x) の確率分布をガウス分布(正規分布)と呼びます。ガウス分布を N (µ, σ 2 ) のよう
に表し、確率変数がガウス分布に従うことを X ∼ N (µ, σ 2 ) と書きます。ガウス分布の確率
密度を決める µ と σ 2 がそれぞれどのような役割を果たしているのか見て行きましょう。
1.2
モーメント母関数と特性関数
まずは期待値と分散を定めます。
期待値と分散の定義
∫
E[X] : =
∫
∞
X(ω)dP (ω) =
Ω
[
]
V [X] : = E (X − E[X])2
−∞
xfX (x)dx
(1.1)
(1.2)
ガウス分布について期待値と分散を計算してみるとそれぞれ µ, σ 2 となります。ここで µ = 0
とし、σ 2 を少しずつ小さくしていくと図のように fX (x) のグラフが変化します。
右端では σ 2 → 0 となっています。2 右端のグラフは確率変数が X = 0 しか取らないこと
(分散が 0⇔ X が期待値の周りに分散しない ⇔ X が確率的に変動しない)を意味し、この
とき X は一点分布に従うと言います。このように分散が大きくなるとグラフのピークは緩や
かに、小さくなるとグラフのピークが鋭くなることがわかります。これはどの確率密度関数
に対しても同様です。3 今度は期待値と分散を効率的に求める方法を考えてみましょう。
モーメント母関数
定理 1.2
実数 θ に対し、E[eθX ] をモーメント母関数と呼び、次が成り立つ。
d
θX E[X] =
E[e ]
dθ
θ=0
2
特に σ 2 = 0 のとき、fX (x) はディラックのデルタ δ(x) になります。δ(x) は任意の g(x) に対して
Z ∞
δ(x)g(x)dx = g(0)
−∞
をみたします。
3
lim af (ax) = δ(x) を以下に示します。任意の関数 g(x) に対してデルタ関数の定義式
a→∞
が成り立つことを用います。 lim af (ax)g(x) の積分を考え、ax = y とおいて置換し
Z
∞
δ(x)g(x) = g(0)
−∞
a→∞
Z
∞
lim af (ax)g(x)dx =
−∞ a→∞
=
Z
∞
lim f (y)g(
−∞ a→∞
Z ∞
y
a
)dy
f (y)g(0)dy = g(0)
−∞
となり、デルタ関数の定義式と比べて lim af (ax) = δ(x) を得ます。この性質は特定の確率密度関数において
a→∞
a → ∞ とすると分散 → 0 となることに相当します。
4
[ ∂ θx ]
d [ θx ]
d
θX
θX
∵ E e
= E ∂θ e
= E[xe ] より、両辺で θ = 0 として E[X] =
E[e ]
が
dθ
dθ
θ=0
得られます。
例 2. モーメント母関数 M (θ) ≡ E[eθX ] を用いて分散 V [X] を表せ。
(
)2
答. M 00 (θ) = E[X 2 eθX ] より V [X] = E[X 2 ] − E[X]E[X] = M 00 (0) − M 0 (0) となる。
例 3. X ∼ N (µ, σ 2 ) のとき、X のモーメント母関数 E[eθX ] を計算せよ。
答. fX (x) = √
θX
E[e
1
−
2πσ 2
∫ ∞
]=
−∞
e
(x−µ)2
2σ 2
とすると、
θX
fX (x)e
dx = √
1
2πσ 2
∫
∞
e−
(x−µ)2
+θx
2σ 2
dx
−∞
)
x−µ
=√
e
σdy
y=
とおいた
σ
2πσ 2 −∞
(
)
∫ ∞
∫ ∞
1
1
1
1 2 2
1
1
− 2 (y−θσ)2 + 2 σ 2 θ2 µθ
− 2 (y−θσ)2
=√
e
e
e dy = √
dy ×eµθ+ 2 σ θ
2π −∞
2π −∞
|
{z
}
1
∫
∞
y2
e− 2
(
σy+µ
確率密度の積分=1
1
となり、E[eθX ] = eµθ+ 2 σ
2 θ2
を得る。
例 4. X ∼ N (µ, σ 2 ) のとき、E[δ(X − x0 )] を計算せよ。x0 は定数とする。ここで δ(x) は
ディラックのデルタである。
答. fX (x) を N (µ, σ 2 ) の確率密度とすると、fX (x) = √
∫
E[δ(X − x0 )] =
∞
−∞
1
2πσ 2
e−
(x−µ)2
2σ 2
dxfX (x)δ(x − x0 ) = fX (x0 ) = √
1
2πσ 2
により、
−
e
(x0 −µ)2
2σ 2 .
(1.3)
となる。
特性関数
定理 1.3
E[eiθX ] を特性関数と呼び、fX (x) ≥ 0 なら特性関数は必ず存在する。
ここでいう「存在する」とは「発散しない」という意味です。実際 fX (x) ≥ 0 なら |fX (x)| =
[
]
fX (x) なので |E[eiθX ]| ≤ E |eiθX | = E[1] = 1 となり E[eiθX ] が θ に対し有限な値を取る
ことがわかります。
積分発散の恐れを持つモーメント母関数に対し、特性関数は(確率密度が非負なら)必ず
収束するため、その分だけ優れていることがわかります。特性関数が fX (x) のフーリエ変換
そのものであることにも注意してください。
1.3
確率変数の独立性
確率変数 X, Y が確率密度 fXY (x, y) の確率分布に従っている際、g(X, Y ) の期待値を
∫ ∞
∫ ∞
E[g(X, Y )] =
dx
dyg(x, y)fXY (x, y)
(1.4)
−∞
−∞
5
で定義します。これにより次の共分散が定まります。
共分散の定義
定義 1.4
x, y の期待値、分散を次で定める。
2
E[X] = µX , E[Y ] = µY , V [X] = σX
, V [Y ] = σY2
2 (= Cov[X, Y ]) を次で定める。
これに対し共分散 σXY
[
]
2
σXY
≡ E (X − µX )(Y − µY )
(1.5)
共分散は次のように計算されます。
[
]
[
]
2
σXY
= E (X − µX )(Y − µY ) = E XY − µX Y − µY X + µX µY
= E[XY ] − µX E[Y ] − µY E[X] + µX µY
= E[XY ] − E[X]E[Y ]
期待値と分散の性質
定理 1.5
実数 a, b, c、確率変数 X, Y に対し次が成り立つ。
E[aX + bY + c] = aE[X] + bE[Y ] + c
(1.6)
2
V [aX + bY + c] = a2 V [X] + 2abσXY
+ b2 V [Y ]
(1.7)
まずひとつめの式を示します。確率密度関数 fXY (x, y) を用いて(定積分の線形性から)
∫∫
[
]
E aX + bY + c =
dxdyfXY (x, y)(ax + by + c)
∫∫
∫∫
∫∫
=a
dxdyfXY (x, y)x + b
dxdyfXY (x, y)y + c
dxdyfXY
=aE[X] + bE[Y ] + c
となり、示せました。ふたつめの式は期待値の定義から計算して
V [aX + bY + c] =E[(aX + bY + c)2 − (E[aX + bY + c])2 ]
(
)
+ 2bcY
=E[ a2 X 2 + :::::
b2 Y 2 + c2 + 2abXY + 2acX
(
)
+ 2bcµ
− a2 µ2X + b2 µ2Y + c2 + 2abµX µY + 2acµ
X
Y ]
:::::
2
=a2 V [X] + b2 V [Y ] + 2abσXY
:::::::
となり示せました。 さて、これで準備が整ったので独立性と従属性についての議論をはじ
めましょう。事象 A の起きる確率 P (A) と事象 B の起きる確率 P (B)、および事象 A と事象
B が同時に起きる確率を P (A ∩ B) と書くことにしましょう。このとき
P (A ∩ B) = P (A) × P (B)
と書ける場合とそうでない場合があります。4 上式のように書けるとき事象 A と B は独立と
言い、そうでないとき事象 A と B は従属であると言います。これを連続確率変数の言葉に
4
例えば 52 枚のトランプ(ジョーカー無し)から一枚のカードを無作為に取り出す時のことを考えてみま
しょう。
1
4
=
P (偶数番の絵札が出る) =
52
13
6
置き換えると次のようになります。
2 つの確率変数の独立性
定義 1.6
2 つの確率変数 X, Y が従う確率分布の確率密度関数 fXY (x, y) が fXY (x, y) = fX (x) ·
fY (y) のように書けるとき、X と Y は独立であると言う
2
ここからただちに X, Y が独立 ⇒ σXY
= 0 が成り立つことがわかります。また、必要十
分条件のチェックが次の定理で行えます。5
カッツ
Kacの独立性判定定理
定理 1.7
X1 , X2 が独立 ⇔ E[eiθ1 X+iθ2 X2 ] = E[eiθ1 X1 ]E[eiθ2 X2 ]
(⇒) は独立性の定義から
∫∫
∫∫
iθ1 X+iθ2 X2
iθ1 x+iθ2 x2
E[e
]=
dx1 dx2 fX1 X2 (x1 , x2 )e
×
dx01 dx02 fX1 X2 (x01 , x02 )
|
{z
} |
{z
}
∫
=
これは E[eiθ1 X+iθ2 X2 ]
∫
dx1 fX1 (x1 )eiθ1 x
|
{z
∫
これは 1
dx02 fX2 (x02 ) dx2 fX2 (x2 )eiθ2 x2
}|
{z
これは E[eiθ1 X1 ]
∫
dx01 fX2 (x01 )
}
これは E[eiθ2 X2 ]
= E[eiθ1 X1 ]E[eiθ2 X2 ]
となって示されます。次に (⇐) を示しましょう。
∫
FX1 (x1 ) = dx02 fX1 X2 (x1 , x02 )
∫
FX2 (x2 ) =
dx01 fX1 X2 (x01 , x2 )
とおくと、仮定 E[eiθ1 X+iθ2 X2 ] = E[eiθ1 X1 ]E[eiθ2 X2 ] より
∫∫
E[eiθ1 X1 +iθ2 X2 ] =
dx1 dx2 fX1 X2 (x1 , x2 )eiθ1 x1 +iθ2 x2
:::::::::::::
∫∫
∫∫
iθ1 X1
iθ2 X2
0
0 iθ1 x1
E[e
]E[e
]=
dx1 dx2 fX1 X2 (x1 , x2 )e
×
dx01 dx2 fX1 X2 (x01 , x2 )eiθ2 x2
∫∫
=
dx1 dx2 FX1 (x1 )FX2 (x2 )eiθ1 x1 +iθ2 x2
::::::::::::::::
すなわち fX1 X2 (x1 , x2 ) = FX1 (x1 )FX2 (x2 ) が成り立ちます。これはほとんど独立性の定義と
同値ですね。
2 つの確率変数が独立であるかそうでないかの判断は重要です。独立な確率変数に対する
議論は簡単ですが、従属な確率変数に対して(期待値や分散などを)議論する際は条件付き
確率という概念を持ち出す必要があります。6
6
4
1
24
=
、P (絵札が出る) =
=
となり P (偶数番の絵札が出る) = P (偶
52
13
52
13
数番 ∩ 絵札) 6= P (偶数番) × P (絵札) となります。これより、「偶数番の札が出る」ことと「絵札が出る」こと
は独立でないことがわかります。
5
特性関数でなくモーメント母関数を用いても良いです。
6
条件付き確率は付録で取り上げます。
および P (偶数番の札が出る) =
7
例 5. X1 , X2 , · · · , Xn が互いに独立に N (0, 1) に従うとする。このとき E[Xi Xj ] を計算せよ。
答. i 6= j のとき、Xi と Xj が独立なので E[Xi Xj ] = E[Xi ]E[Xj ] = 0 であり、i = j のとき、
E[Xi Xj ] = E[Xi2 ] = V [Xi ] = 1 となる。これより E[Xi Xj ] = δij を得る。
1.4
大数の法則と中心極限定理
まずは準備としてマルコフの不等式を用意しておきましょう。
Markov の不等式
定理 1.8
確率変数 X に対して非負関数 ϕ(X) が存在するとき、任意の正数 a に対して次が成り
立つ。
E[ϕ(X)]
P (ϕ(X) ≥ a) ≤
a
P (ϕ(X) ≥ a) は ϕ(X) ≥ a となる確率を表す。
(証明)領域 A を次のように取ります。
A = {x : ϕ(x) ≥ a} = {ϕ(x) ≥ a となる x の領域 }
さらに階段関数 1A を次のように取ります。
1 (x ∈ A)
1A (x) =
0 (x 6∈ A)
(
)
1 ≥ 1A より ϕ(x) = 1A (x)ϕ(x) + 1 − 1A (x) ϕ(x) ≥ 1A (x)ϕ(x) ≥ 1A (x)a とすることがで
きます。これより E[ϕ(X)] ≥ E[1A (X)a] = aE[1A (X)] となり、E[1A (X)] = P (X ∈ A) =
P (ϕ(X) ≥ a) に気をつけて E[ϕ(X)] ≥ aP (ϕ(X) ≥ a) が得られます。これでマルコフの不
等式が示せましたね。
(
)2
マルコフの不等式で ϕ(X) = X − E[X] , a = 2 とおくと
P (|X − E[X]| ≥ ) ≤
チェビ
V [X]
2
シェフ
が得られます。これをChebyshev7 の不等式と呼びます。さらにチェビシェフの不等式から
1 ∑n
X=
Xi とおくと次の結果が得られます。
n i=1
大数の法則
定理 1.9
期待値 µ、分散 σ 2 の独立同分布な確率変数 Xi(i = 1, 2, · · · , n)に対し、次が成立する。
1∑
n→∞
Xi −→ µ
n
n
i=1
1∑
1
Xi に対し、E[X] = × nµ = µ より、チェビシェフの不等式から任意の ε > 0
n
n
i=1
に対し
V [X]
σ 2 n→∞
P (|X − µ| ≥ ) ≤
=
−→ 0
2
n2
n
X=
7
(ロシア人)チェビシェフの英綴りは Chebychev,Chebyshov,Tchebycheff,Tschebyscheff など揺れあり。
8
となり、X → µ となることが示せます。ただし収束の仕方8 から、このように示された性質
を大数の弱法則と呼びます。 最後に中心極限定理を示しましょう。
中心極限定理
定理 1.10
互いに独立な確率変数 X1 , X2 , · · · , Xn が平均 µ、分散 σ 2 の同一確率分布に従うとき、
X1 + X2 + · · · Xn
X −µ
X=
とおくと、確率変数 Z =
σ は n → ∞ で標準ガウス N (0, 1)
n
√
n
(ガウスで平均 0、分散 1)に従う。
証明します。独立同分布なので、それぞれの確率変数 Xi が確率密度 fX (xi ) に従っていると
します。9 ここで Xi の期待値 µ を 0 として一般性を失わないので10 Xi のモーメント母関数を
MX (θ) とおくと
0
00
MX (0) = 1, MX
(0) = 0(期待値 = 0), MX
(0) = σ 2
√
θ2
X
+ o(1/n) とし、Z = σ
となり、MX ( √θnσ ) をマクローリン展開して MX (θ/σ n) = 1 +
√
2n
n
のモーメント母関数は
}
{
X
X
X
X
( θ ) n
θ √
θ√ 1
θ√ 2
θ√ n
σ/
n
nσ
nσ
nσ
MZ (θ) = E[e
] = E[e
]E[e
] · · · E[e
] = MX σ√n
(
)n
θ2
となって、MZ (θ) = 1 +
+ o(1/n)
を得ます。両辺の対数を取ると
2n
(
)
( 2
)
2
θ2
θ
マクローリン展開
n→∞ θ
log MZ (θ) = n log 1 +
+ o(1/n)
=
n
+ o(1/n) −→
2n
2n
2
2
となり、n → ∞ で MZ (θ) = eθ /2 が得られます。これは標準ガウスのモーメント母関数で
あり、中心極限定理が証明できました。
1.5
ランダムウォークからブラウン運動へ
コインを投げて表が出れば 1 円もらえ、裏が出れば 1 円取られるというゲームを t 回繰り
返したとき、もらった額の累計を Zt で表し、1 次元ランダムウォークと呼びます。
1 次元対称ランダムウォーク
定義 1.11
非負整数 t に対して X1 , X2 , · · · , Xt をそれぞれ互いに独立で
1
1
P (Xi = +1) = , P (Xi = −1) =
2
2
をみたす確率変数とする。このとき、1 次元対称ランダムウォーク Zt を次式で定める。
Z0 = 0, Zt = X1 + X2 + · · · + Xt
Zt について中心極限定理を適用します。E[Xi ] = 0、V [Xi ] = 1 より、中心極限定理から
ε > 0 に対し P (|X| > ε) = 0 ⇒ X → 0 に注意。このような収束の仕方を確率収束と呼びます。
fX (xi ) は任意の確率密度とします。
10
それが嫌なら Yi = Xi − µ として先を続けても良いでしょう。
8∀
9
9
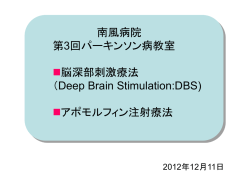
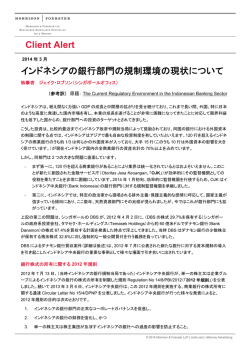
図 2: ブラウン運動の例(0.1 秒ごとに 1,000step) 連続だが至る所微分不能なイメージ
√
t → ∞ で Zt ∼ tN (0, 1) すなわち Zt ∼ N (0, t) が導けます。11
1 次元ランダムウォークはコインを 1 秒ごとに一度投げるモデルを想定していますが、こ
の時刻を連続変数にしたもの、つまりコインを連続的に投げるモデルがブラウン運動です。
ランダムウォークの極限(ブラウン運動)
定理 1.12
X1 , X2 , · · · を定義 1.11 と同様に取り、非負実数 t と ∆t に対して t/∆t が非負整数であ
るとする。確率変数 Bt を次で定義する。
B0 = 0, Bt = lim
√
∆t→0
∆t(X1 + X2 + · · · + Xt/∆t )
(1.8)
この Bt をブラウン運動(標準ブラウン運動)と呼ぶ。ブラウン運動は次を満足する。
1. 従う分布 Bt ∼ N (0, t)
2. 独立増分性 t ≥ s のとき Bt − Bs と Bs は互いに独立
3. 定常増分性 t ≥ s のとき Bt − Bs は N (0, t − s) に従う
∵ 1. は、先述したように中心極限定理から明らかです。2. は、
Bt − Bs = lim
∆t→0
Bs = lim
√
√
∆t→0
∆t(Xs/∆t+1 + · · · + Xt/∆t )
∆t(X1 + X2 + · · · + Xs/∆t )
からわかるように、それぞれの Xi が独立なので Bt − Bs と Bs は互いに独立です。3. は
Bt − Bs = lim
∆t→0
√
∆t (Xs/∆t+1 + Xs/∆t+2 + · · · + Xt/∆t )
|
{z
}
(t−s)/∆t 項
=
∼
√
t − s · lim
∆t→0
√
Xs/∆t+1 + Xs/∆t+2 + · · · + Xt/∆t
√
t−s
∆t
t − sN (0, 1) (中心極限定理より)
により Bt − Bs ∼ N (0, t − s) となり、求める結果が示せます。
11
X ∼ N (0, 1) のとき、E[σX] = 0, V [σX] = σ 2 より σX ∼ N (0, σ 2 ) を用いました。
10
1.6
演習問題
本章の内容に関連する問題です。以下では断りがなければ Bt は標準ブラウン運動とします。
1
ガウスの性質
互いに独立で同分布に従う確率変数 Xi ∼ N (µi , σi2 ) について
Yn = X1 + X2 + · · · + Xn
の従う分布を求めよう。
(1) Xi のモーメント母関数 Mi (θ) を求めよ。
(2) X1 + X2 + · · · + Xn のモーメント母関数 M n (θ) が次のようになることを示せ。
[
1∑ 2 2
σi θ
M (θ) = exp −
2
n
]
n
i=1
これにより、Yn の従う分布を求めよ。
∑
1
とする。 lim
fi Xi の従う確率分
n→∞
n
i=1
布を求めよ。
(ここでは収束性について気にしないで計算して良い(lim と E[·] の
入れ替えが可能)とする)12
n
2
(3) 適当な実数 t > 0, fi = f ( it
n ) を取り、σi =
2
ブラウン運動の性質
標準ブラウン運動 Bt について、次を計算せよ。
(1) E[|Bt |]
(2) E[Bt Bs ](ただし t > s とする)
3
ブラウン運動の計算
2 ) + B 2 + 2(B B + B B + · · · B
Zn = 2(B12 + B22 + · · · Bn−1
1 2
2 3
n−1 Bn ) の従う確率分布
n
を求めよ。
4
Chapman Kolmogorov 方程式
]
[
1
(y − x)2
初期値 x のブラウン運動 x + Bt の確率密度 ρt (x, y) = √
exp −
と、任
2t
2πt
意区間 C ∈ R について、次が成り立つことを示せ。
∫
∫ ∞
∫
dzρt+s (x, z) =
dyρs (x, y)
dzρt (y, z)
−∞
C
C
これをチャップマン・コルモゴロフ方程式という。
12
次のリーマン和を使って計算します。
Z
0
1
g(s)ds = lim
n→∞
11
n
X
i=1
g( ni ) n1
ブラウン運動と確率積分
2
自分に作れないものは理解できない。
確率変数 X が時刻 t によって変動するとき、これを Xt のように記して確率過程と呼びます。
t は正実数とします。Xt の微小時間 dt に対する変動を dXt = Xt+dt − Xt で表します。
2.1
ブラウン運動と 3 つの伊藤ルール
前節では二項分布(ランダムウォーク)の極限でブラウン運動が与えられることを見まし
た。本テキストでは以後議論して行くためのスタート地点として、あらためてブラウン運動
を以下の性質をみたす確率過程と再定義します。
ブラウン運動の性質
定義 2.1
ブラウン運動 Bt は次の性質をみたす連続確率過程である。以下では t > s > r とする。
(1) Bt は期待値 0、分散 t のガウス分布に従う。ただし B0 = 0 とする。
(2) Bt − Bs は Bs − Br と独立であり、期待値 0、分散 t − s のガウス分布に従う。
特に (2) の前半の性質を独立増分性と呼び、後半の性質を定常増分性と呼びます。13
例 1. E[Bt2 ]、E[Bt4 ] および E[Bt Bs ](t > s)を求めよ。
答. はじめのふたつは単純なガウス積分の計算です。Bt ∼N (0, t) により
∫ ∞
1 − x2
2
x2 √
E[Bt ] =
e 2t dx = t
2πt
−∞
∫ ∞
1 − x2
4
E[Bt ] =
x4 √
e 2t dx = 3t2
2πt
−∞
を得ます。14 次に E[Bt Bs ] を計算します。Bt − Bs と Bs が互いに独立なので
E[Bt Bs ] = E[(Bt − Bs )Bs ] + E[Bs2 ] = E[Bt − Bs ]E[Bs ] + E[Bs2 ] = E[Bs2 ] = s
を得ます。
伊藤解析の入り口として確率過程の微分の性質をまとめた 3 つの伊藤ルールを紹介します。
伊藤ルールその 1
おまじない
(dt)2 = 0
13
本来は確率過程の連続性についても定義が必要ですが、既にランダムウォークの極限から推察される通り自
明の性質なので、ここでは省略します。 r
Z ∞
2
π
14
ガウス積分を f (a) =
e−ax dx =
とおくと、f 0 (a), f 00 (a) を計算して得られる次式を利用します。
a
−∞
r
r
Z ∞
Z ∞
2
1 3 π
1 π
4 −ax2
,
x
e
·
x2 e−ax dx =
dx
=
2 a3
2 2 a5
−∞
−∞
12
df (t)
f (t + h) − f (t)
f (t + dt) − f (t)
は lim
だとか lim
で
h→0
dt→0
dt
h
dt
2
定義されるものでした。伊藤ルールその 1 は dt → 0 とする前に、(dt) = 0 としてしまうの
です。これは次のように考えます。
f (t) のテイラー展開16
微分可能な15 f (t) の微分係数
1
df (t) = f 0 (t)dt + f 00 (t)(dt)2 + · · ·
2
df
が作れますが、その際上式の第 2 項か
dt
ら先がすべてなくなって 0 になることに注目します。これは積分についても同様です。積分
も和をとって dt → 0 とするように構成するため、
∫
∫
∫
1
f 00 (dt)2 + · · ·
df = f 0 dt +
2
::::::::::::
で両辺を dt で割り、dt → 0 としてやれば微分係数
の右辺第
2 項は dt → 0 で 0 となるのです。これにより、微分 or 積分を前提とすると、(dt)2 = 0
:::::::
として良いことがわかるでしょう。
伊藤ルールその 2
補題 2.2
ブラウン運動の変動増分を dBt ≡ Bt+dt − Bt で定義する。このとき、次が成り立つ。
(dBt )2 = dt
(2.1)
s 6= t のとき dBt と dBs は互いに独立
(2.2)
しばしば dBt (正しくは dBt = Wt dt と書いたときの Wt )はホ
ワイトガウスノイズと呼ばれます。ブラウン運動の独立増分性は
非同時の白色雑音が互いに独立であると言い換えることができま
す。dBt が微小変分を表す記号ではないことに注意して下さい。17
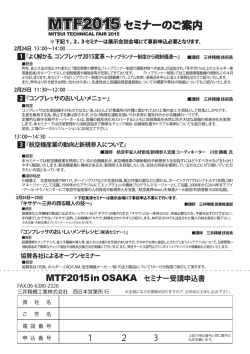
厳密には、この式 (dBt )2 = dt は平均二乗極限の意味18
dt
(dBt)2
で成り立ちます。
定常増分性(Bt − Bs ∼N (0, t − s)) よりただちに dBt ∼N (0, dt)
とわかり、以後もこの性質を使った計算が何度も現れます。
∵ 確率変数 (dBt )2 の期待値と分散を求めます。準備として 例 1. 同様にガウス積分から
E[(dBt )2 ] = dt, E[(dBt )4 ] = 3(dt)2 を先に得ておきます。これより
¬ E[(dBt )2 ] = dt
{
}2
V [(dBt )2 ] = E[ (dBt )2 − dt ] = E[(dBt )4 − 2(dBt )2 dt + (dt)2 ] = 2(dt)2
を得ます。伊藤ルールその 1 から dt2 = 0 となり、確率変数 (dBt )2 は図のような分散 0 の
一点分布(図は確率密度)に従い、期待値 dt しか取らないことから (2.1) を得ます。また、
(2.2) は独立増分性から明らかでしょう。
15
以後いちいちこのような仮定は明示しません。
1
f (t + a) = f (t) + f 0 (t)(t − a) + f 00 (t)(t − a)2 + · · · で t → t + dt, a → t, df = f (t + dt) − f (t) とします。
2
17
これは、ブラウン運動がいたるところでジグザグしている(微分不能である)ことに起因します。定常増分
性から dBt ∼N (0, dt) となるためです。ブラウン運動の微分不能性については付録で解説します。
`
´2
18
つまり lim E[ (dBt )2 − dt ] = 0 の意味で等しいということです。曖昧な書き方ですが、ここでは伊藤
16
dt→0
ルールその 1 に従って lim を外したものも同等と見なすわけです。
13
伊藤ルールその 3
dBt dt = 0
これは (dBt )2 = dt と同様に期待値と分散を計算して
E[(dBt )3 ] = dt · E[dBt ] = 0, V [(dBt )3 ] = E[(dBt )6 ] = (dt)3 = 0
から示されます。以上をまとめると、次の計算則が得られることがわかりました。
伊藤ルール
まとめ dBt = Bt+dt − Bt について、次が成り立つ。a
• (dt)2 = 0
• (dBt )2 = dt
• (dBt )(dt) = 0
a
これはあくまで(後の積分で)dt → 0 とすることを前提としているので、現時点では「主張」という
より計算のための「おまじない」だと思っておいた方が良い。
伊藤ルールには含めませんが、共分散の計算までを視野に入れた便利な公式があるのでこ
こで紹介しておきます。19
伊藤積分の等長性(確率微分形式表示)
補題 2.3
次が成り立つ。ただし δ(t) はディラックのデルタである。
E[dBt dBs ] = δ(t − s)dsdt
(2.3)
∵ t 6= s のとき dBt と dBs は互いに独立なので E[dBt dBs ] = E[dBt ]E[dBs ] = 0 となる。
また、t = s のとき、δ(0)ds = 1 から20 求める結果を得る。
続いて、積の微分のブラウン運動版(積の確率微分)を考えましょう。テイラー展開可能
な f (Bt , t), g(Bt , t) について、Xt = f (Bt , t), Yt = g(Bt , t) とし、d(Xt Yt ) を計算します。伊
藤ルールにより、積の微分には残らない項が出現します。
19
これを積分したものを伊藤積分の等長性と呼び、普通の教科書では(伊藤の)確率積分を定義した後、その
分散を計算するための補題として紹介されますが、微分形で表示した方が見通しも使い勝手も良いです。
Z ∞
20
直感的に δ(0)ds =
δ(t − s)ds = 1 と考えて良いのですが、これは例えば
−∞
(
0
δh (x) =
1/h
x < 0, h ≤ x
0≤x<h
とでもおき、h → 0 で δh (x) → δ(x) となることと、0 ≤ x < h で hδh (x) = 1 となることからもわかります。
つまり、十分小さな h > 0 に対して E[(Bt+h − Bt )(Bs+h − h)] = h2 δh (t − s) となることを示せばよいわけ
です。h2 が dtds を表しており、このままでは h → 0 とすると両辺 0 になってしまいます。h → 0 とする直前
の状態で表記するというのが伊藤ルールの考え方なのです。
別証明を演習問題 2 につけてあるので、そちらも参照してみてください。
14
積の確率微分
補題 2.4
次が成り立つ。
d(Xt Yt ) = dXt Yt + Xt dYt + (dXt )(dYt )
証明は簡単です。
∵ d(Xt Yt ) = Xt+dt Yt+dt − Xt Yt
= (Xt + dXt )(Yt + dYt ) − Xt Yt
=
X
X
t Yt + (dXt )Yt + Xt (Yt ) + (dXt )(dYt ) − t Yt
= (dXt )Yt + Xt (dYt ) + (dXt )(dYt )
これより求めるべき主張を得ます。21 同様に、d(Xt Ys ) = (dXt )Ys +Xt (dYs )+(dXt )(dYs )
も成り立ちます。
例 2. d(Bt )2 を計算せよ。
答. 積の確率微分から d(Bt )2 = 2Bt dBt + dt を得ます。
これで簡単な確率微分の計算ができるようになりました。次に、普通の微積分で言うとこ
レンマ
ろのテイラー展開に相当する伊藤の補題を扱います。これは後に確率積分を導入するきっか
けとなり、確率微分方程式を論じるための足がかりともなります。
2.2
伊藤の補題
はじめに制限を強くして、伊藤の補題をシンプル化した次式の成立を示しておきましょう。
1
df (Bt ) = f 0 (Bt )dBt + f 00 (Bt )dt
2
(2.4)
∵ f (x) がテイラー展開できるとし
df (x) = f dx +
1 d2 f
1 df
(dx)2 +
(dx)3 + · · ·
2
2 dx
6
dx
:::::::::::::::::::
x → Bt とすると伊藤ルールから波線部
= 0 となり、
::::::
1
df = f (Bt )dBt + f 0 (Bt )(dBt )2
2
1
= f (Bt )dBt + f 0 (Bt )dt
2
により、求める式 (2.4) を得ます。
例 3. 以下を計算せよ。
(1) d(Bt )2 (2) d(ln |Bt |) (3) d(cos Bt ) (4) d(Btn )
答. 全て伊藤の補題を使って計算します。
(1) f (x) = x2 とおくと f 0 (x) = 2x, f 00 (x) = 2 から df (Bt ) = 2Bt dBt + dt を得る。
ふつうの微積分では d(f g) = (df )g + f (dg) + (df )(dg) = (df )g + f (dg) + f 0 g 0 (dt)2 となり、(dt)2 = 0 よ
り第 3 項が落ちます。
21
15
(2) f (x) = ln |x| とおくと f 0 (x) =
1 00
1
dBt
dt
, f (x) = − 2 から df (Bt ) =
−
を得る。
x
x
Bt
2Bt2
(3) f (x) = cos x とおくと f 0 (x) = − sin x, f 00 (x) = − cos x から
1
df (Bt ) = − sin Bt dBt − cos Bt dt を得る。
2
(4) f (x) = xn とおくと f 0 (x) = nxn−1 , f 00 (x) = n(n − 1)xn−2 から
1
df (Bt ) = nBtn−1 dBt + n(n − 1)Btn−2 dt を得ます。
2
これで下地が整いました。伊藤の補題を示します。
伊藤の補題
補題 2.5
二変数関数 f (x, t) が x, t それぞれに対してテイラー展開可能であるとき次が成り立つ。
df (Bt , t) =
∂f
∂f
1 ∂2f
dt +
dBt +
dt
∂t
∂x
2 ∂x2
∵ 2 変数関数のテイラー展開は
(
df (g(t), t) =
) (
) (
)
∂f
1 ∂2f
∂f
1 ∂2f
1 ∂2f
2
2
dt +
(dt) + · · · +
dg +
(dg) dgdt + ·::
·· +
+ ···
∂t
2::::::::::::::::
∂t2
∂g
2 ∂g 2
2 ∂g∂t
::::::::::::::::
と書けるから、g(t) → Bt と置き換えることで伊藤ルールから波線部
= 0 となり、求めるべ
:::::::
き結果を得ます。
例 4. d(tBt2 ) を計算せよ。
答. 伊藤の補題から d(tBt2 ) = (Bt2 + t)dt + 2tBt dBt を得ます(積の確率微分を応用しても示
せます)。
2.3
確率積分
確率微分形式について整理できたところで、今度は確率積分を定義しましょう。
伊藤の確率積分
定義 2.6
t0 < t1 < · · · < t∞ に対し ∆t = supi (ti+1 − ti ) とする。また Bt を標準ブラウン運動と
する。このとき、伊藤積分(あるいは確率積分)を次で定める。
∫
t∞
dg(Bt )f (Bt , t) := lim
∆t→0
t0
∞
∑
(
)
g(Bti+1 ) − g(Bti ) f (Bti , ti )
(2.5)
i=0
例えば f = 1 とすると次が成り立つことがわかります。
∫ t∞
dg(Bt ) = g(Bt∞ ) − g(Bt0 )
t0
以後、具体計算の中で露骨に現れないため lim は省いて記述します(理由はすぐ後にわ
∆t→0
∫ t
かります)。定義に従って
dBs Bs を計算してみましょう。(Bti+1 − Bti )2 = ti+1 − ti 22 、
0
22
∆t → 0 とすることがわかっているので、このように考えていいわけです。
16
つまり (dBt )2 = dt から、
∫
t∞
t0
(
)
∞
∞
∑
∑
Bti + Bti+1
Bti+1
Bti
dBt Bt =
(Bti+1 − Bti )Bti =
(Bti+1 − Bti )
+
−
2
2
2
=
i=0
∞
∑
1
2
1
2
(Bt2i+1 − Bt2i ) −
i=0
i=0
∞
∑
i=0
1
1
(Bti+1 − Bti )2 = (Bt2∞ − Bt20 ) − (t∞ − t0 )
2
2
1
最後に t∞ → t, t0 → 0 として (Bt2 − t) を得ます。具体的な計算は以下のように定義に立ち
2
返らず伊藤の補題を援用します。
例 5. 次の確率積分を計算せよ。
∫ t
∫ t
1
(1) Bs dBs (2) eBs − 2 s dBs
0
0
答. どちらも頼りになるのは伊藤の補題です。23
(1) 伊藤の補題より d(Bs2 ) = 2Bs dBs + ds なので両辺整理して積分し次を得ます。
∫
t
0
1
Bs dBs = (Bt2 − t)
2
(2) こちらも伊藤の補題を適用します。
1
1 1
1 1 s −
1 Bs
−
2 s ds + eBs − 2 s dBs + eB
2 s ds
− e
deBs − 2 s = 2
2
両辺を積分し、左辺と右辺を反転し、
∫ t
1
1
eBs − 2 s dBs = eBt − 2 t − 1
0
1
を得ます。 このような eBs − 2 s を伊藤の指数関数と言います。24
例 6. 次の確率積分の期待値と分散を計算せよ。
∫ t
∫ t
∫ s
∫ t
1
(1) Bs dBs (2) dBu
dBv (3) eBs − 2 s dBs
0
0
0
0
答. 確率積分の計算の後で期待値を取るか、先に期待値を取るか、結果は変わりませんが後
者の方が要領よく計算できます。
1
(1) 積分した結果が既に 例 5. (1) からわかっており、期待値は E[ (Bt2 − t)] = 0、分散は
2
1 2
1
t2
2
V [ (Bt − t)] = V [Bt ] =
となります。
2
4
2
(2) 例 1. で求めたように期待値は当然 E[Bs Bt ] = min(s, t) となるわけですが、ここではそ
うせず、伊藤積分の等長性を使って計算してみましょう。
[∫ t
] ∫ t∫ s
∫ s
∫ t ∫ s
E
dBu
dBv =
E[dBu dBv ] =
δ(u − v)dudv
0
23
24
確率積分の定義から
0
Z
0
0
u=0
v=0
t
dg(Bs , s) = g(Bt , t) − g(0, 0) となることに注意。
0
伊藤の指数関数は指数関数の微分しても関数形が変わらない(det = et dt)性質を持った確率過程です。
17
ここで、t > s と仮定します。0 < u < t, 0 < v < s であることに気をつけると
∫ s
1 (0 < u < s)
δ(u − v)dv =
0 (s < u < t)
0
∫
t
∫
s
となるから、
E[dBu dBv ] = s となります。t > s の仮定を外すと、答えは
u=0
v=0
min(t, s) となって先に得ている結果に一致します。次に分散ですが、これは V [dBu dBv ] =
E[dudv] = dudv により、
[∫ t
] ∫ t∫ s [
] ∫ t ∫ s
∫ s
V
dBu
dBv =
V dBu dBv =
du
dv = ts
0
0
0
0
0
0
を得ます。
1
(3) 先の 例 5. (2) からわかるように積分結果は eBt − 2 t − 1 であり、E[eBt ] はガウス分布の
1
1
1
モーメント母関数であり e 2 t となり、E[eBt − 2 t − 1] = e− 2 t E[eBt ] − 1 = 0 を得ます。
次に分散は、V [· · · ] の線形性から
∫ t
∫ t
∫ t
1
1
Bs − 2 s
Bs − 2 s
V[ e
dBs ] =
V [e
dBs ] =
E[e2Bs −s ]ds = et − 1
0
0
(2.6)
0
と計算されます。
例 7. Xt = f (Bt , t) とおく。f (x, t) は x, t に対してテイラー展開可能な関数とする。t > s
のとき、Xt − Xs と dBt が互いに独立であることを示せ。
答. fx =
∂f
∂f
, ft =
と書くことにします。伊藤の補題により
∂x
∂t
1
df (Bu , u) = ft (Bu , u)du + fx (Bu , u)dBu + fxx (Bu , u)du
2
両辺積分して
Xt − Xs =
∫ t(
s
)
∫ t
1
ft (Bu , u) + fxx (Bu , u) du +
fx (Bu , u)dBu
2
s
となります。s < u < t において Bu と dBt が互いに独立25 、および dBu と dBt が互い
に独立であることから Xt − Xs と dBt が互いに独立であることが言えます。26 さて、 例 5. で見たように確率積分じたいが確率変数なので、期待値や分散を持ち、なん
らかの確率分布に従っているはずです。ここでは伊藤積分の持つ性質について、以下の順に
調べていきましょう。
∫ t
• 確率積分 It =
Xs dBs の期待値、分散は(一般的に)どう計算されるか
0
• 確率積分はどんな分布に従うか
25
これにより f (Bu , u) と dBt が互いに独立であることがわかります。
独立増分性から Xt と dBt が互いに独立で、Xs と dBt も互いに独立なので E[Xt dBt ] = 0, E[Xs dBt ] = 0
なので差を取って E[(Xt − Xs )dBt ] = 0 までは得られますが、独立性までは主張できません。
26
18
まずは期待値ですが、これは Xs と dBs が互いに独立であることから容易に
∫ t
∫ t
∫ t
E[It ] = E[ Xs dBs ] =
E[Xs dBs ] =
E[Xs ] · E[dBs ] = 0
0
0
:::::::
0
=0
とわかります。次に分散ですが、計算する前に次の補題を用意しておきます。
ブラウン運動の縮約則(等長性の拡張)
補題 2.7
次が成り立つ。
E[Xt Ys dBt dBs ] = E[Xs Ys ]δ(t − s)dtds
(証明)t = s として一般性を失わない。
まず E[(Xt − Xs )Ys dBt dBs ] = 0 を示す。これは t > s のとき 例 7. と dBt と Ys が互いに
独立であることと併せて (Xt − Xs )Ys dBs と dBt が独立であることから
t > s のとき
E[(Xt − Xs )Ys dBs ]E[dB
t]
:::::::
=0
E[(Xt − Xs )Ys dBt dBs ] =
t = s のとき
E[(Xt − Xt )Yt dBt2 ]
:::::::::::::::::::
=0
となることにより示せる。次に Xs Ys と dBs dBt が独立であることから
E[Xt Ys dBt dBs ] = E[(Xt − Xs + Xs )Ys dBt dBs ]
= E[(Xt − Xs )Ys dBt dBs ]
:::::::::::::::::::::::
+ E[Xs Ys dBt dBs ]
=0
= E[Xs Ys ]E[dBt dBs ]
= E[Xs Ys ]δ(t − s)dtds
を得る。最後の式変形で E[dBt ] = 0, E[dBt dBs ] = δ(t − s)dtds を使った。
∫ t
これより分散を計算しましょう。It =
Xs dBs に対し、E[It ] = 0 より
0
[( ∫
V [It ] =
E[It2 ]
∫ t∫
=
)2 ]
t
=E
Xs dBs
0
t
[∫
=E
∫ t∫ t
0
0
]
t
Xv dBv
Xu dBu
0
0
E[Xu2 ]δ(u
E[Xu Xv dBu dBv ] =
0
∫
t
∫
− v)dudv =
0
t
E[Xu2 ]du
0
となります。なお、最後の式変形で式(2.3)を使いました。
これらをまとめると次の結果が得られたことになります。
確率積分の期待値と分散(伊藤積分の等長性)
補題 2.8
∫ t
確率過程 Xs = f (Bs , s) の確率積分 It =
Xs dBs について、次が成り立つ。
0
∫
t
E[Xs2 ]ds
E[It ] = 0, V [It ] =
0
特に後者の性質を等長性と呼ぶ。
さらに一歩踏み込んで、Xs を単に s の関数 f (s) としたとき、It がどのような分布に従う
かを考えます。この場合も補題 2.3 が成り立つことを踏まえて、確率積分
∫ t
It =
f (s)dBs
0
19
の特性関数 E[eiθIt ] を計算してみましょう。略式表記ですが積分を和を取ることと見て、指
Rt
∏
数の肩の積分から E[eiθ 0 f (s)dBs ] = ts=0 eiθf (s)dBs のように書くと、27
(∫
iθIt
E[e
] = E[iθ exp
)
t
f (s)dBs ] = E[
0
t
∏
(
)
¬
exp iθf (s)dBs ] =
s=0
t
∏
(
)
E[exp iθf (s)dBs ]
s=0
と変形できます。最後の¬は、それぞれの dBs が互いに独立であることに依ります。続いて
1
dBs が N (0, ds) に従うことから E[eiθf (s)dBs ] = e− 2 θ
t
∏
t
∏
1 2
(
)
2
E[exp iθf (s)dBs ] =
e− 2 θ {f (s)} ds
s=0
s=0
2 {f (s)}2 ds
と書け、これにより
(
)
∫ t
1
= exp − θ2
{f (s)}2 ds
2
0
となります。これはガウス分布の特性関数そのものですから、以下の主張を得ます。28
f (s) の確率積分はガウス分布に従う
定理 2.9
( ∫ t
)
∫ t
2
確率積分 It =
f (s)dBs はガウス分布 N 0, {f (s)} ds に従う。
0
0
なお、確率過程 Xs = f (s, Bs ) についての確率積分 It が従う分布を求めようとすると¬で
先に進めなくなり、定理 2.9 と同様の主張は結論づけられません。
∫ t
例 8. 確率積分
eγ(s−t) dBs の期待値と分散を求めよ(γ は正の実定数)。
0
[∫
]
t
γ(s−t)
答. 定理 2.9 からもわかるように期待値は E
e
∫
t
eγ(s−t) E[dBs ] = 0 とな
dBs =
0
0
り、分散についても
] ∫ t
[∫ t
1
dse2γ(s−t) =
eγ(s−t) dBs =
(1 − e−2γt )
V
2γ
0
0
とわかります。 この結果はのちのち確率微分方程式の計算で現れます。
例 9. 次の確率積分の期待値と分散を計算せよ。
∫ ∞
I=
eiθBt dBt
0
∫
答. E[I] =
∞
E[eiθBt ] · E[dBt ] により、期待値は 0 です。次に分散は
0
∫
∞
V [I] =
√
1
2
due− 2 (2θu)
=
0
π2
2θ2
と計算されます(最後にガウス積分を用いました)。
きちんと書く場合は定義にさかのぼって(t0 → 0, t∞ → t で読みかえて下さい)次のように計算します。
»
„ Z t∞
«–
»
„ X
«–
»Y
–
∞
∞
指数法則
iθ(Bti+1 −Bti )f (ti )
E exp iθ
f (s)dBs
= E exp iθ
(Bti+1 − Bti )f (ti )
= E
e
27
t0
i=0
i=0
»
–
∞
Y
¬
=
E eiθ(Bti+1 −Bti )f (ti )
i=0
指数法則
=
exp
„
1
− θ2
2
Z
t∞
Y
=:
eiθdBs f (s)
!
s=t0
t∞
«
f (s)2 ds
t0
このように指数法則で和の指数関数を指数関数の積に分解し、独立性から期待値の積に書き換え、指数法則を逆
に辿る、というプロセスで計算します。
P
P
i.i.d.
28
ガウス分布の性質 Xi ∼ N (0, 1) ⇒ i ai Xi ∼ N (0, i a2i ) と照らし合わせると自然な帰結と言えます。
20
∫
t
eγ(s−t) dBs の共分散 Cov[It , Is ] を求めよ(γ は正の実定数)。
例 10. 伊藤積分 It =
0
答. E[It ]=0 なので、t ≥ s として E[It Is ] を計算すれば答えが得られます。
[∫
∫
t
γ(u−t)
]
s
γ(v−s)
E[It Is ] = E
e
dBu
e
dBv
0
0
∫ t∫ s
=
eγ(u−t) eγ(v−s) E[dBu dBv ]
0
0
∫ t∫ s
=
eγ(u−t) eγ(v−s) dudvδ(u − v)
∫0 s 0
=
eγ(2u−t−s) du
0
) 1
1 −γt ( γs
=
e
e − e−γs = e−γt sinh γs
2γ
γ
となります。t ≥ s の条件を外せば E[It Is ] =
ます。
(
)
1 −γ max(t,s)
e
sinh γ min(t, s) とも書け
γ
例 11. 伊藤積分によるブラウニアンブリッヂ Yt を 0 ≤ t ≤ T において次式で定義する。
∫
Yt = (T − t)
0
t
1
dBu
T −u
Yt と Ys の共分散を計算せよ。
答. 求めるべき共分散を σY2t Ys とおくと σY2t Ys = E[Yt Ys ] − E[Yt Ys ] であり、E[Yt ] = 0 から、
[∫ t
]
∫ s
1
1
σY2t Ys = E[Yt Ys ] = (T − t)(T − s)E
dBu
dBv
0 T −u
0 T −v
∫ t∫ s
1
= (T − t)(T − s)
E[dBu dBv ]
0 (T − u)(T − v)
0
∫ t∧s
1
= (T − t)(T − s)
du
(T − u)2
0
(
)
1
1
= (T − t)(T − s)
−
T −t∧s T
ここで t ∧ s = min(t, s) とし、デルタ関数の性質
∫ t∫
0
s
δ(u − v)dudv = t ∧ s
0
を用いました。ここで一般性を失わないので t ≥ s とすると
(
)
1
1
(T − t)s
2
σYt Ys = (T − t)(T − s)
−
=
T −s T
T
となり、これより t ≥ s の条件を外して σY2t Ys = t ∧ s −
21
st
を得ます。
T
2.4
演習問題
本章の内容に関連する問題です。以下では断りがなければ Bt は標準ブラウン運動とします。
1
(小問集合:計算例題)
(1) E[cos Bt ] を計算せよ。
2
(2) 0 ≤ t ≤ 1 において Xt = Bt − tB1 とおく29 。共分散 σX
(s < t) を計算せよ。
t Xs
∫ t
(3) c > 0 に対し Xt =
e−cs dBs とする。分散 lim V [Xt ] を計算せよ。
t→∞
0
2
(ブラウン運動の完全系関数による表示)
t が区間 [0, 1] 内にあり、実関数列 φn (x) は [0, 1] で完全系であるとする。また、{Zn }
はそれぞれ互いに独立であり、N (0, 1) に従うとする。
ここで φn (x) が完全系であるとは、次が成り立つことである。
∑
φn (x)φn (x0 ) = δ(x − x0 )
n
(1) 次が成り立つことを示せ。
Bt =
∑
n
∫
t
φn (x)dx
Zn
0
(2) (1) より E[dBt dBs ] = δ(t − s)dtds を示せ。
√
(3) φn (x) = 2 sin(nπx)(n = 1, 2, · · · )とし30 (1) の結果から Bt を構成せよ。
3
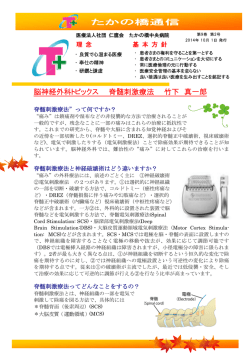
(停止時刻と鏡像原理の問題)
時刻 t = 0 で原点 x = 0 を出発した粒子が一次元ブラウン運動をするモデルを考え、初
めて x = θ に到達した時刻が [t, t + dt] の区間内にある確率 pθ (t) を求めよう。
Bt
e+(e-x)
e
x
t
Te
この粒子の、時刻 t における座標 x の確率密度を f (x, t) と書くとき、
(
)
1
x2
f (x, t) = √
exp −
2t
2πt
と書け、時刻 t に座標 x(> θ) に到着するには、必ず θ を一度は通過するから
∫
f (x, t) =
t
dsf (x − θ, t − s)pθ (s)
0
29
ブ ラ ウ ニ ア ン ブ リッヂ
このような Xt をBrownian Bridgeと呼びます。
この関数が完全系(さらに規格直交系)であることはここでは証明しません。量子力学では高さ無限の井戸
型ポテンシャルに完全束縛された粒子についてシュレディンガー方程式を解くことで完全規格直交系の波動関数
としてこの関数形が得られます。
30
22
が成り立つ。この関係式両辺をラプラス変換することで、初期通過時刻の確率密度 pθ (t)
を求めよ。ただし次の関係が成り立つことは用いてよい。
)
(
∫ ∞
√
1
1
z2
√ exp −
− st dt = √ e−|z| s
4t
s
πt
0
(
)
∫ ∞
2
√
|z|
z
√
exp −
− st dt = e−|z| s
4t
2 πt3
0
4
(ストラトノビッチ積分)
確率過程の f (t, Bt ) のストラトノビッチ積分を次で定義する。
∫ t
∫ t
f (s, Bs ) + f (s, Bs + dBs )
f (s, Bs ) ◦ dBs ≡
dBs
2
0
0
(a) f (s, Bs ) が Bs のみに従っている(単に f (Bs ) と書く)とすると、次が成り立つこ
とを示せ。
∫ t
∫
∫ t
1 t 0
f (Bs ) ◦ dBs =
f (Bs )dBs +
f (Bs )ds
2 0
0
0
(b) (a) と同じ仮定のもとで次が成り立つことを示せ。31
∫
f (Bt ) − f (B0 ) =
t
f 0 (Bs ) ◦ dBs
0
(c) 次のストラトノビッチ積分を計算せよ(右辺は答えです)。
∫ t
1
Bs ◦ dBs = Bt2
(1)
2
∫0 t
cos(Bs ) ◦ dBs = sin(Bt )
(2)
0
∫ t
(d) 次の確率積分がストラトノビッチ積分
f (Bs ) ◦ dBs に一致することを示せ。
0
∫
t
0
5
f (Bs + 12 dBs )dBs
ホワイトガウスノイズの自己相関(確率微分の等長性)
以下の手順に従って E[dBt dBs ] = δ(t − s)dtds を示そう。以下では一般性を失わない
ので t ≥ s とする。
(1) 0 < s + h < t, 0 < h に対して E[(Bt+h − Bt )(Bs+h − Bs )] = 0 を示せ。
(2) δh (x) を次のように定める。
δh (x) =
0
x ≥ h, x < 0
1/h
0≤x<h
十分小さい h > 0 に対して δh (x) をプロットせよ。また、lim δh (x) = δ(x) を示せ。
h→0
(3) (1) から E[(Bt+h − Bt )2 ] = h が示されている。h を十分小さくとれば32 次が成り
立つことを示せ。
E[(Bt+h − Bt )(Bs+h − Bs )] = h2 δh (t − s)
31
これは通常の解析学の連鎖則(微分積分学の基本定理)に相当し、計算結果はストラトノビッチ積分の結果
は通常の解析学の積分と同じであることがわかります。ただし、本質的に両者は全くの別モノです。
32
正しくは 0 < t − s < h の場合に E[(Bt+h − Bt )(Bs+h − Bs )] = h − (t − s) となることを考慮しなければな
らないのですが、h を十分小さくとれば t − s < h はほぼ t − s = 0 と見なしてかまわない、としてしまいます。
23
確率微分方程式
3
理解なんてものは、概ね願望に基づくものだ。
いよいよ確率微分方程式とその解法、応用を取り上げます。ここではまず確率微分方程式の
解を確率積分を用いて構成する手法を紹介し、続いて放物型偏微分方程式の解を対応する確
率微分方程式の解を用いて構成する方法(ファインマン・カッツの定理)について取り扱い
ます。
3.1
伊藤の補題の拡張
確率微分方程式を解く前段階として、伊藤過程と、伊藤過程による伊藤の補題を用意して
おきます。まず、適当な関数 a(x), b(x) を用いて
∫
Xt = X0 +
∫
t
a(Xs )ds +
0
t
b(Xs )dBs
0
をみたす確率過程 Xt を伊藤過程と言います。また、このように表された方程式を(積分形
ですが慣習的に)確率微分方程式と呼びます。33
伊藤の補題 (ver.up)
補題 3.1
二変数関数 f (x, t) を x, t でテイラー展開可能とする。伊藤過程 Xt に対し次が成り立つ。
df (Xt , t) =
∂f
1 ∂2f
∂f
dt +
dXt +
(dXt )2
∂t
∂x
2 ∂x2
∵ 伊藤の補題の証明で、Bt → Xt に書き換えるだけです。
3.2
ケーススタディ
振る舞いの良い関数 a(x), b(x) に対し、次の組み
dX = a(X )dt + b(X )dB · · · 確率微分方程式
t
t
t
t
X0 = x0 (定数)
· · · 初期条件
を確率微分方程式の初期値問題と呼ぶことにします。
ここで a(Xt )dt をシグナル項と呼び、b(Xt )dBt をノイズ項と呼びます。ノイズがない確率
微分方程式は通常の常微分方程式となります。34 いくつかの例題を通して確率微分方程式を
解く流れを眺めてみましょう。
例 1. 次の確率微分方程式の初期値問題を解け。ただし µ, σ は正の実定数とする。
dX = µdt + σdB
t
t
X0 = x0 (定数)
33
伊藤過程を微分形で書くと dXt = a(Xt )dt + b(Xt )dBt (これもまた確率微分方程式と呼ばれます)となり
ます。ここで b(Xt ) と dBt が独立であることを注意しておきます。
34
b = 0 でなくでも、xt = E[Xt ] とおいて確率微分方程式両辺の期待値を取ると、dxt = E[a(Xt )]dt となっ
てノイズが消えます。
24
答. 与式両辺を積分し、
Xt = x0 + µt + σBt
を得ます。
例 2. 次の確率微分方程式の初期値問題を解け。ただし µ, σ は正の実定数とする。
dX = −µX dt + σdB
t
t
t
X0 = x0 (定数)
答. まず d(eµt Xt ) を積の確率微分から計算します。
d(eµt Xt ) = µeµt Xt dt + eµt dXt
µt
t dt
=
µe
Xt dt + eµt (
−µX
+ σdBt )
= eµt σdBt
次に両辺を積分して、
∫
e Xt − X0 = σ
µt
となり、これを整理して Xt = x0 e−µt + σ
∫
t
eµs dBs
0
t
eµ(s−t) dBs を得ます。
0
例 3. 次の確率微分方程式の初期値問題を解け。ただし µ, σ は正の実定数とする。
dX = µX dt + σX dB
t
t
t
t
X0 = x0 (正の定数)
まず d ln |Xt | を伊藤の補題から計算します。
dXt (dXt )2
−
Xt
2Xt2
1
1
=
(µXt dt + σXt dBt ) −
(µXt dt + σXt dBt )2
Xt
2Xt2
(
)
1 2
σ2
dt + σdBt
= µdt + σdBt − σ dt = µ −
2
2
d ln |Xt | =
次に両辺積分して
(
)
Xt σ2
ln = µ −
+ σBt
X0
2
となり、|X0 | = x0 であり、指数関数が正であることに注意して
Xt = x0 e(µ−
σ2
2 )t+σBt
を得ます。 この Xt を幾何ブラウン運動と言います。
dx
= µx にノイズを付けたもので、液面上
dt
を(速度比例の)粘性抵抗を受けながら運動する粒子モデルや、金融工学におけるブラック
ショールズモデルなど、応用上様々な局面に登場します。
幾何ブラウン運動は典型的な 1 階斉次方程式
25
例 4. 次の確率微分方程式の初期値問題を解け。
dX = 1 dt + √X dB
t
t
t
4
X = 0
0
√
答. まず d(2 Xt ) を伊藤の補題から計算して
√
dXt
(dXt )2
d(2 Xt ) = √ − √
Xt
4 Xt3
√ 1
dt
√
√
+ dBt −
Xt2 dt = dBt
=
· 3
4 Xt
4 Xt
となり、次に両辺積分して
√
√
2 Xt − 2 X0 = Bt
1
X0 = 0 より Xt = Bt2 が得られます。
4
いくつかの例から、
(1) ある確率過程 f (Bt , t) を設定し、df を積の確率微分や伊藤の補題から計算する
(2) 与式を用いて整理し、df を dt と dBt の式で表示する
(3) 両辺を積分し、f −1 から確率微分方程式の解を得る。
という流れが見て取れます。ここで問題となるのは、(1) の段階で f (Bt , t) をどのように設定
すべきかということですが、これについては以下の技法で整理しましょう。
3.3
ノイズ抽出
いくつかの例題を取り上げましたが、これだけではあまりにも場当たり的です。万能では
ありませんが、以下のノイズ抽出35 を知っておくと便利です。
ノイズ抽出による確率微分方程式の解法
確率微分方程式
dXt = a(Xt )dt + b(Xt )dBt
に対して以下のそれぞれの条件に応じてシグナルを取り除き、Xt をノイズ項の積分で構
成できる。
(a) a(x) = −cx のとき(c は実定数)
d(ect Xt ) を計算し、両辺積分する。
)0
1(
{b(x)}2 + (定数) · b(x) のとき
4
1
0
f (x) =
となる f (x) を求め、df (Xt ) を計算し、両辺積分する。
b(x)
(b) a(x) =
∗(a) の手法で閉じた解が構成できるのは b(x) が定数の場合に限る。
考え方
極めて限定的な条件ですが、ひとまずこのような戦略を取る根拠を示しておきましょう。
35
ネーミングは本テキストのみの呼称です。
26
(a) について dXt = −cXt + b(Xt )dBt に対して、d(ect Xt ) を計算すると、
ct t + b(Xt )dBt ) = ect b(Xt )dBt
ce
Xt dt + ect (
−cX
d(ect Xt ) = cect Xt dt + ect dXt = となり、シグナルが取り除けます。両辺積分し、
∫ t
Xt = e−ct X0 +
e−c(t−s) b(Xs )dBs
0
が得られます(b が定数でなければ自己無撞着な解となります)。
(b) について f 0 (x) =
1
と取り、df (Xt ) を伊藤の補題から計算してみましょう。
b(x)
1
b0 (Xt )
dXt − 2
(dXt )2
b(Xt )
2b (Xt )
)
1 (
b0 (Xt )
=
a(Xt )dt + b(Xt )dBt −
{b(Xt )}2 dt
b(Xt )
2{b(Xt )}2
(
)
a(Xt ) b0 (Xt )
=
−
dt + dBt
b(Xt )
2
df (Xt ) =
:::::::::::::::::::
となり、仮定から:::::::
波線部 =(定数)となります。これにより、df (Xt ) = dBt が得られ
ます。
例 5. 次の確率微分方程式の初期値問題を解け。
1
2
dXt = 3Xt3 dt + 3Xt3 dBt
X = x (定数)
0
0
答. ノイズ抽出の条件 (b) を満足することから、f (x) = x1/3 と取ります。
1
1 2
1
1
· 2/3 dXt + · · 5/3 (dXt )2
3 X
2 3 X
t
t
(
)
1
1
1 1 2
1
1/3
2/3
4/3
= · 2/3 3Xt dt + 3Xt dBt + · · · 5/3 · 9Xt dt = dBt
3 X
2 3 3 X
t
t
( 1/3
)3
1/3
1/3
両辺を積分し、Xt − x0 = Bt を整理して Xt = x0 + Bt を得ます。
df (Xt ) =
例 6. 次の確率微分方程式の初期値問題を解け。ただし a, b, c は実定数とする。
dX = (a − bX )dt + cdB
t
t
t
X0 = x0 (定数)
答. 確率微分方程式両辺の期待値を取り
xt = E[Xt ] とおくと dxt = (a − bxt )dt となり、こ
a (
a ) −bt
れを解いて xt = + x0 −
e を得ておきます。Yt = Xt − xt とおくと、
b
b
dYt = −bYt dt + cdBt , Y0 = 0
が得られ、ノイズ抽出の条件 (a) をみたすことから、d(ebt Yt ) を計算します。
d(ebt Yt ) = bebt Yt + ebt dYt
= cebt dBt
27
∫
− Y0 = c
0
a (
れより Xt = Yt + xt = + x0 −
b
両辺を積分して
∫
t
ebt Yt
t
bs
e dBs となり、Yt = c
eb(s−t) dBs を得ます。こ
0
∫ t
a ) −bt
e +c
eb(s−t) dBs を得ます。
b
0
例 7. 次の確率微分方程式の初期値問題を解け。
√
dXt = − 1 Xt dt + 1 − Xt2 dBt
2
1
X 0 =
2
答. ノイズ抽出の条件 (b) を満足することから f (x) =Sin−1 x と取ります。
)
(
1
1
1
−2Xt
−1
dSin Xt = √
dXt + · −
·√
(dXt )2
2
2
2
1 − Xt
1 − Xt2
(
)
√
√
2
1
1
1
Xt
2
2 dt = dB
− Xt dt + 1 − Xt dBt + · √
=√
·
1
−
X
t
t
3
2
2
1 − Xt2
1 − Xt2
両辺を積分し Sin−1 12 =
3.4
より Xt = sin(Bt + π6 ) を得る。
π
6
偏微分方程式の初期値問題
1 次元空間の拡散方程式の初期値問題
1 ∂2u
∂u
=
, u(x, 0) = f (x)
∂t
2 ∂x2
を解いてみると、36 N (0, t) に従う Bt の確率密度 g(x) = √
∫
∞
u(x, t) =
−∞
36
1 − x2
e 2t を用いて
2πt
f (x + y)g(y)dy = E[f (x + Bt )]
よく使われる手法はフーリエ変換によるものです(興味のある読者は偏微分方程式とフーリエ変換をテーマ
Z ∞
u(x, t)e−ikx dx
にした書籍やサイトで解法を探してみて下さい)。u のフーリエ変換 Fu(x, t) = ũ(k, t) =
とおくと、与式両辺のフーリエ変換は
−∞
∂ ũ
k2
= − ũ
∂t
2
となり、これは変数分離で解け、ũ(k, t) = ũ(k, 0)e−
k2
t
2
が得られます。さらに ũ(k, t) を逆変換し、
u(x, t) = F −1 ũ(k, t)
Z ∞
1
=
ũ(k, t)eikx dk
2π −∞
Z ∞
k2
1
=
ũ(k, 0)e− 2 t eikx
2π −∞
`
´
= F −1 ũ(k, 0)g̃(k)
とします。ここで g̃(k) = e−
k2
t
2
は g(x) = √
示でき、
u(x, t) =
Z
=
Z
∞
−∞
∞
−∞
x2
1
e− 2t のフーリエ変換です。u(x, t) は u と g の畳み込みで表
2πt
u(x0 , 0)g(x − x0 )dx0
u(x + y, 0)g(y)dy (x0 − x → y とおいた)
と表せます。g(x) はガウス分布 N (0, t) の確率密度であることがわかります。
28
と書くことができます。x + Bt は確率微分方程式 dXt = dBt , X0 = x の解なので、これを用
いて u(x, t) = E[f (Xt )] と表せます。
このように(放物型偏微分方程式の解)↔(確率微分方程式の解)の間には明確な対応が
あり、これを決定づけるのが次に掲げる定理です。
放物型偏微分方程式と確率微分方程式の関係
定理 3.2
確率微分方程式 dXt = a(Xt )dt + b(Xt )dBt , X0 = x の解を Xt とするとき、u(x, t) =
E[f (Xt )] は偏微分方程式
∂u
∂u 1
∂2u
= a(x)
+ {b(x)}2 2 , u(x, 0) = f (x)
∂t
∂x 2
∂x
(コルモゴロフの後退偏微分方程式)の解となる。
∵ u(Xs , t − s) に対し(t を固定して s を変数と見る)伊藤の補題から
∂u
∂u
∂2u
ds u(Xs , t − s) = − ds +
dXs + 2 dXs2
∂x
∂x
( ∂s
)
2
∂u 1
∂u
∂u
2∂ u
+ a(Xs )
+ {b(Xs )}
= −
ds + a(Xs ) dBs
∂s
∂x 2
∂x2
∂x
両辺積分して
u(Xt , 0) − u(X0 , t) =
∫ t(
0
)
∫ t
2
∂u
∂u 1
∂u
2∂ u
−
+ a(Xs )
+ {b(Xs )}
a(Xs ) dBs
ds +
2
∂s
∂x 2
∂x
∂x
0
¬
両辺の期待値を取り、E[] = 0 と、E[u(Xt , 0)] = E[f (Xt )]、u(X0 , t) = u(x, t) より
u(x, t) = E[f (Xt )] − E[¬]
となる。u がコルモゴロフの後退偏微分方程式の解のとき、¬ = 0 より u(x, t) = E[f (Xt )]
が得られる。
具体例を通してこの対応の意味について考えてみましょう。
例 8. コルモゴロフの後退方程式の初期値問題
∂u
1 ∂2u
=
, u(x, 0) = δ(x)
∂t
2 ∂x2
の解 u(x, t) を次の手順に従って求めよ。
(1) 対応する確率過程 Xt の確率微分方程式の初期値問題を解け。
(2) Xt の従う確率分布を求めよ。
(3) u(x, t) を求めよ。
答. 既にフーリエ変換を使用する方法で答えを得ていますが、確率微分方程式を使ってやっ
てみましょう。
(1) a = 1, b = 1 より対応する確率微分方程式は dXt = dBt であり、初期条件 X0 = x に注
意して Xt = x + Bt を得ます。
(2) ブラウン運動はガウスに従います。答えは Xt ∼ N (x, t) です。
29
(3) E[δ(Xt )] を求めれば良いわけですが、これは 5 ページの 例 4. と同様、Bt の確率密度
に一致します。
∫ ∞
2
1 − (y−x)
1 − x2
2t δ(y) = √
√
u(x, t) = E[δ(Xt )] =
e
e 2t
2πt
2πt
−∞
となります。
例 9. コルモゴロフの後退方程式の初期値問題
∂u
∂u 1 2 ∂ 2 u
, u(x, 0) = δ(x − y)
=v
+ α
∂t
∂x 2 ∂x2
の解 u(x, t) を次の手順に従って求めよ。
(1) 対応する確率過程 Xt の確率微分方程式の初期値問題を解け。
(2) Xt の従う確率分布を求めよ。
(3) u(x, t) を求めよ。
答. これは等速直線運動にノイズ摂動(白色雑音)を入れたモデルです。
(1) a(x) = v, b(x) = α とすればよく、対応する確率微分方程式は
dXt = vdt + αdBt , X0 = x
となります。これはちょうど 例 1. で扱ったケースであり、両辺を積分して Xt =
x + vt + αBt を得ます。当初の想定通りの解となりますね。
(2) 確率的に変動するのは Bt だけなので Xt ∼ N (x + vt, α2 t) とわかります。
(3) 解は u(x, t) = E[δ(Xt − y)] であり、これもまた 5 ページの 例 4. と同様、Xt の
確率密度に一致し、
∫ ∞
(z−x−vt)2
(x−y+vt)2
1
1
√
u(x, t) = E[δ(Xt − y)] =
e− 2α2 t δ(z − y)dz = √
e− 2α2 t
2πα2 t
2πα2 t
−∞
として解が得られます。
折角なのでこの u(x, t) が与えられた偏微分方程式の解になっていることを確かめてみましょう。
(x−y+vt)
(x−y+vt)
∂u
−1
1
2v(x − y + vt)t − (x − y + vt)2
1
√
=
·√
e− 2α2 t −
e− 2α2 t
2
2
∂t
2t
2α t
2πα2 t
2πα2 t
2
1
v(x − y + vt)
(x − y + vt)
= − u(x, t) −
u(x, t) −
u(x, t)
2
2
2t
α t
2α2 t2
∂u
(x − y + vt)
=−
u(x, t)
∂x
α2 t
∂2u
1
(x − y + vt)2
=
−
u(x,
t)
−
u(x, t)
∂x2
α2 t
α 4 t2
2
2
となるので、確かに所与の偏微分方程式が成り立っていることがわかります。
この例題についてもう少し踏み込んでみましょう。まず、 例 9. で与えられた偏微分方程
式とその解について x ↔ y を交換してみると偏微分方程式は(x ↔ −x なので)
∂u 1 2 ∂ 2 u
∂u
∂u 1 2 ∂ 2 u
∂u
=v
+ α
↔
=
−v
+ α
∂t
∂x 2 ∂x2
∂t
∂x 2 ∂x2
30
と変換され、その解 u は
√
1
2πα2 t
e−
(x−y+vt)2
2α2 t
↔√
1
2πα2 t
e−
(x−y−vt)2
2α2 t
と変換されます。よく見ると v ↔ −v を交換した結果に一致していることがわかります。こ
のようにしてコルモゴロフの後退方程式から生成された偏微分方程式をコルモゴロフの前進
方程式(またはフォッカー・プランク方程式)と呼びます。 例 9. の教訓から、次の主張に導
かれます。
フォッカー・プランク方程式とその解
定理 3.3
確率微分方程式の初期値問題
dXt = a(Xt )dt + b(Xt )dBt , X0 = x
の解を Xtx とする。コルモゴロフの後退方程式の初期値問題
∂u
∂u 1
∂2u
= a(x)
+ {b(x)}2 2 , u(x, y, 0) = δ(x − y)
∂t
∂x 2
∂x
の解 u(x, y, t) = fXtx (y)、つまり Xtx の確率密度は次のフォッカー・プランク方程式の初
期値問題の解になる。
) 1 ∂2 (
)
∂u
∂ (
2
=−
a(y)u +
{b(y)}
u
, u(x, y, 0) = δ(y − x)
∂t
∂y
2 ∂y 2
∵ 時間の境界条件 g(x, ∞)
= g(x, 0) = 0 をみたす任意の 2 変数関数 g(x, t) をとり、
dg(Xt , t) を伊藤の補題から計算し、両辺積分すると Xt のみたす確率微分方程式から
)
∫ ∞(
∫ ∞
2
∂
∂g
1
x
x ∂
2 ∂
g(X∞ , ∞)−g(X0 , 0) =
+a(Xt ) + {b(Xt )}
g(Xt , t)dt+
b(Xtx )dBt
2
∂t
∂x 2
∂x
∂x
0
0
を得ます。仮定より左辺は 0 で、両辺の(Xt についての)期待値を取ると右辺第 2 項は 0 に
なります。ここで右辺第 1 項の期待値は fXt (y) についての積分で書き換えられることに注意
すると37
(
)
∫ ∞
∫ ∞
2
∂
∂
1
2 ∂
dy
dtfXt (y)
+ a(y, t)
+ {b(y, t)}
g(y, t) = 0
∂t
∂y 2
∂y 2
−∞
0
となり、積分順序を入れ替え、y と t について部分積分すると
∫ ∞ ∫ ∞ (
)
))
∂ (
∂2 ( 1
∂
2
a(y, t)fXt (y) + 2 {b(y, t)} fXt (y) g(y, t) = 0
dt
dy − fXt (y) −
∂t
∂y
∂y 2
0
−∞
:::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
が得られます。任意の g に対して:::::::
波線部 = 0 なので、これより求める結果を得ます。
38
例 10. フォッカー・プランク方程式の初期値問題
∂u
∂u 1 2 ∂ 2 u
= cu + cx
+ α
, u(x, 0) = δ(x − X0 )
∂t
∂x 2 ∂x2
を解け。
˛
∂a(Xt )
∂a(x) ˛˛
ここで気をつけたいのは、例えば
は、
を意味しているということです。
∂x
∂x ˛x=Xt
38
なお、ここまで初期条件をデルタ関数に限定しましたが、一般的な初期条件への拡張は演習問題で取り上げ
ています。
37
31
答. 対応する確率微分方程式の初期値問題は dXt = −cXt dt+αdBt , X0 > 0 であり、39 この解
は伊藤の補題で d(ect Xt ) = cect Xt dt+ect dXt = cect Xt +ect (−cXt dt+αdBt ) = ect αdBt
を計算し、両辺を積分して整理し、
∫ t
−ct
Xt = X0 e + α
ec(s−t) dBs
0
1 2
α (1 − e−2t ) となり、Xt がガ
2
ウス分布 N (µt , σt2 ) に従うため、定理 3.3 より Xt の確率密度 u(x, t) = fN (µt ,σt2 ) (x) が
求める解となります。
] √
[
[
]
1
(x − µ)2
c
(x − X0 e−ct )2
=
u(x, t) = √
exp −
exp − 2
2σ 2
πα2 (1 − e−2ct )
α (1 − e−2ct )
2πσ 2
を得ます。Xt は期待値が µt = X0 e−ct 、分散が σt2 =
このようにやや複雑な形のフォッカー・プランク方程式も、対応する確率微分方程式が
解ければたちどころに解が得られます。
視点を変えて、 定理 3.2 の主張を非斉次項付きの偏微分方程式に拡張してみましょう。
Feynman
Kac
ファインマン-カッツの定理
定理 3.4
確率微分方程式 dXt = a(Xt )dt + b(Xt )dBt , X0 = x の解を Xt とするとき、
u(x, t) = E[e−
Rt
0
q(Xr )dr
f (Xt )]
は偏微分方程式
∂u
∂u 1
∂2u
= a(x)
+ {b(x)}2 2 − q(x)u, u(x, 0) = f (x)
∂t
∂x 2
∂x
ポ テ ン シャル
(非斉次項付きコルモゴロフの後退偏微分方程式)の解となる。
∵ 定理 3.2 と同じ手法で示します。非斉次項をつけるため、e−
Rs
0
q(Xr )dr
u(Xt , t − s) につ
いて伊藤の補題を適用します。
)
( R
) (
Rs
Rs
(
)
s
ds e− 0 q(Xr )dr u(Xs , t − s) = ds e− 0 q(Xr )dr u(Xs , t − s) + e− 0 q(Xr )dr ds u(Xs , t − s)
(
)(
)
R
− 0s q(Xr )dr
+ ds e
ds u(Xs , t − s)
となりますが、下線部 = 0 に注意すると
( Rs
)
Rs
ds e− 0 q(Xr )dr u(Xs , t − s) = − q(Xs )e− 0 q(Xr )dr ds
)
(
Rs
∂u 1
∂2u
∂u
+ a(Xs )
+ {b(Xs )}2 2 ds
+ e− 0 q(Xr )dr −
∂s
∂x 2
∂x
Rs
∂u
+ e− 0 q(Xr )dr a(Xs ) dBs
∂x
)
(
2
Rs
∂u 1
∂u
2∂ u
− 0 q(Xr )dr
+ a(Xs )
+ {b(Xs )}
− q(Xs ) ds
=e
−
∂s
∂x 2
∂x2
::::::::::::::::::::::::::::::::::::::::::::
+ e−
Rs
0
q(Xr )dr
a(Xs )
39
∂u
dBs
∂x
この形の確率微分方程式をランジュバン方程式と呼びます。(ニュートンの運動方程式にノイズが入ったも
のです)
32
と展開できます。非斉次項付きコルモゴロフの後退偏微分方程式を仮定すると:::::::
波線部 = 0 と
なり、両辺 s : 0 → t で積分すると
∫ t R
R
s
∂u
− 0t q(Xr )dr
e
u(Xt , 0) − u(X0 , t) =
e− 0 q(Xr )dr a(Xs ) dBs
∂x
0
となり、右辺の期待値 = 0 となることから、両辺の期待値を取ると
E[e−
Rt
0
q(Xr )dr
u(Xt , 0)] − E[u(X0 , t)] = 0
となります。X0 = x, u(Xt , 0) = f (Xt ) に気をつけると
u(x, t) = E[e−
Rt
0
となり、求める結果を得ます。
33
q(Xr )dr
f (Xt )]
3.5
演習問題
本章の内容に関連する問題です。以下では断りがなければ Bt は標準ブラウン運動とします。
1
(確率微分方程式の例題)
次の確率微分方程式の初期値問題を解け。
dXt = dt + 2
√
Xt dBt , X0 = 0
また、Xt の期待値と分散を求めよ。
2
(オルンシュタイン-ウーレンベック過程の応用)
重力加速度を g とし、質量 µ の粒子の自由落下を考える。この粒子には速度 v(t) に比
例する粘性抵抗 −µγv(t) が働くとする。
(1) 落下する粒子の運動方程式を解き、v(t) を求めよ。
(2) 落下する粒子が乱雑力 αµdBt を受けるとして、運動方程式を解け。
(3) (2) で落下する粒子の速度を表す確率過程を Vt とするとき、v(t) = E[Vt ] となる
ことを示し、Vt の分散 V [Vt ] を求めよ。
3
(2 階の確率微分方程式)
調和振動の運動方程式に乱雑力が加わった次の微分方程式について考えよう。
µ
d2
dx(0)
dBt
, x(0) = x0 ,
=0
x(t) = −µω 2 x(t) + µα
2
dt
dt
dt
(a) ラプラス変換を利用することで解が
α
x(t) = x0 cos ωt +
ω
∫
t
sin ω(t − s)dBs
0
となることを示し、x(t) の期待値と分散を求めよ。
(b) Vt は速度過程とし、与式を次のように書き表す。
(
) (
)
( )
dXt
Vt
0
=
dt +
dBt
2
dVt
−ω Xt
α
( )
( )
Xt
0
ここで Yt =
,A =
とおくと、
Vt
α
(
)
(
)
( )
x0
0
1
1 0
dYt =
Yt dt +
AdBt , Y0 =
2
0
−ω 0
0 1
:::::::::::
::::::::
K
I
と書け、ここで:::::::
波線部の行列をそれぞれ K, I とおく。I は単位行列である。
K
sin ωt が成り立つことを示せ。
ω
(2) 形式的に Yt の確率微分方程式を解くと次のように書けることを示せ。
(1) K 2 = −ω 2 I, etK = I cos ωt +
∫
tK
Yt = e
t
e(t−s)K AdBs
Y0 +
0
Xt を求め、この結果が (a) の結果に一致していることを確かめよ。
34
4
(Square Root 過程)
定数 a, b, σ > 0 に関する次の確率微分方程式の初期値問題について考える。
√
dXt = (α − βXt )dt + σ Xt dBt , X0 > 0
(1) 伊藤の補題から d(eβt Xt ) を計算せよ。
(2) (1) の結果から、次の自己無撞着な解が得られることを示せ。
∫ t
√
α
−βt
−βt
Xt = X0 e
+ (1 − e ) + σ
eβ(s−t) Xs dBs
β
0
(3) Xt の期待値と分散を計算せよ。
5
(アインシュタインの関係とアボガドロ数)
運動方程式が次のランジュバン方程式で与えられている粒子の運動について考える。
√
dXt = F (Xt )dt + DdBt
ここで粒子の速度 Xt の確率密度を P (v, t) とする。
(1) P (v, t) の満たすフォッカープランク方程式を書き下せ。
(2) 確率密度保存則から次の連続方程式が成り立つとする。
∂P (v, t)
∂J(v, t)
=−
∂t
∂v
連続方程式をみたす J(v, t)(これを”流れ”という)を求めよ。
(3) この流体が平衡状態にあるとき(P (v, t) が時間に依存せず Peq (v) と書けるとき)、
J(v, t) = Jeq (v) = 0 が成り立つ。40 このとき、次の第 2 種揺動散逸定理を示せ。
F (x) =
D ∂
ln Peq (x)
2 ∂x
(4) 流体中の粒子の運動が次のランジュバン方程式で記述されているとする。
√
D
λ
dXt = −γXt dt +
dBt , γ =
m
m
フォッカープランク方程式を解き、平衡状態の速度の確率密度 Peq (v) を求めよ。
(5) 流体の温度を T 、ボルツマン定数を kB とすると、(4) の解は次のマクスウェル・
ボルツマン分布に従うことが知られている。
(
)
√
m
m 2
P (v, t) =
exp −
v
2πkB T
2kB T
D
が成り立つこ
2kB T
R
とを示せ。また、気体定数 R とアボガドロ数 NA に対して kB =
が成り立つ
NA
ことから、アボガドロ数 NA を求めよ。
このとき、(4) の解と比較してアインシュタインの関係 λ =
(6) 非定常状態のとき、初期条件 P (v, 0) = δ(v − v0 ) の元でフォッカー・プランク方程
式の解 P (v, t) を求めよ。41
40
41
これは定常状態で J が定数であること、および |v| → ∞ で J = 0 であることから自明です。
Z t
√
√
対応する確率微分方程式 dXt = −γXt dt + 2DdBt の解 Xt = v0 e−γt + 2D
eγ(s−t) dBs の期待値と
0
分散を求め、E[δ(Xt − v0 )] を計算します。
35
6
(フォッカー・プランク方程式)
定数 α, β, X0 > 0 におけるフォッカー・プランク方程式の初期値問題
) 1
)
∂
∂ (
∂2 (
u(x, t) = −
αxu(x, t) + α2 2 x2 u(x, t) , u(0, x) = δ(x − X0 )
∂t
∂x
2 ∂x
の解が次式で与えられることを示せ。42
u(x, t) = √
7
[
1
2πβ 2 t
exp −
(ln Xt − ln X0 −
2β 2 t
β2
(α− 2 )t 2 ]
e
)
(一般的な初期条件でのフォッカー・プランク方程式の初期値問題)
フォッカー・プランク方程式の初期値問題
) 1 ∂2 (
)
∂u
∂ (
2
=−
a(x)u +
{b(x)}
u
, u(x, 0) = δ(x − y)
∂t
∂x
2 ∂x2
の解を uy (x, t) とし、初期条件 u(x, 0) = g(x) のもとでの解を u(x, t) とする。
(1) 対応する確率微分方程式の初期値問題 dXt = a(Xt )dt + b(Xt )dBt , X0 = x の解 Xt
を用いて uy (x, 0) = E[δ(Xt − y)] が成り立つことを示し、Xt の確率密度 fXt (x)
を用いて表せ。
∫ ∞
(2) u(x, 0) を uy (x, 0) を用いて表せ。(答:u(x, 0) =
g(y)uy (x, 0)dy となる)
−∞
∫ ∞
g(y)uy (x, t)dy となる)
(3) u(x, t) を uy (x, 0) を用いて構成せよ。(答:u(x, t) =
−∞
8
(終端条件におけるファインマン・カッツの定理)
次の偏微分方程式を終端条件 u(x, T ) = f (x) のもとで解く。43
∂u 1
∂2u
∂u
+ a(x)
+ b(x)2 2 = q(x)u
∂t
∂x 2
∂x
このとき、u(x, t) が次の条件付き期待値で与えられることを示せ。
[
( ∫ T
)
]
u(x, t) = E exp −
q(Xs )ds f (XT )Xt = x
t
ただし Xs は確率微分方程式 dXs = a(Xs )ds + b(Xs )dBs , Xt = x の解である。
9
(ファインマン・カッツの定理の拡張)
偏微分方程式の初期値問題
∂u
∂u 1
∂2u
= a(x)
+ b(x)2 2 − k(x)u + g(x), u(0, x) = f (x)
∂t
∂x 2
∂x
の解が次で与えられることを示せ。
[
(∫ t
) ∫ t
( ∫ t
) ]
u(t, x) = E f (Xt ) exp
k(Xs )ds +
g(Xs ) exp −
k(Xu )du ds
0
0
s
ただし Xt は確率微分方程式 dXt = a(Xt , t)dt + b(Xt , t)dBt , X0 = x の解である。
対応する確率微分方程式 dXt = αXt dt + βXt dBt の解 Xt = X0 e(α−
の確率密度を求めると、それが解になります。
43
終端条件の問題は金融工学でよく用いられます。
42
36
β2
)t+βBt
2
の期待値と分散を求め、Xt
A
Dirac のデルタ関数の計算
人に教えることはできない、自ずから気づく手助けをするにすぎない。
本テキストで度々現れるディラックのデルタ関数の計算方法について復習します。まず、デ
ルタ関数は任意の連続関数 f (x) に対して
∫ ∞
δ(x)f (x)dx = f (0)
−∞
で定義されます。ディラックのデルタ関数は確率変数 X が確率 1 で X = 0 しか取らない場
合の確率密度を表し、上式は f (X) の期待値が f (0) であると解釈できます。
証明は省略しますが、デルタ関数は下記の性質をみたします。
ディラックのデルタの諸性質
¬ xδ(x) = 0
∞
® δ(x) =
0
δ(x) = δ(−x)
∫
x=0
b
¯
x 6= 0
a
1 x0 ∈ (a, b)
δ(x − x0 )dx =
0 x0 ∈
/ (a, b)
∫∞
= 0 ⇒ G(x) = 0』の流れで示します。
∫ ∞
(
)
f (x) δ(x) − δ(−x) dx = 0 から示
¬は定義から f (x) → xf (x) とおくと明らか。は
各々の恒等式は『任意の f (x) で
−∞ f (x)G(x)dx
−∞
せます。xδ(x) = 0 より x 6= 0 のとき δ(x) = 0 となり、
∫ ∫ ∞
δ(x)dx
δ(x)dx =
1=
−
−∞
が得られます。δ(0) = ∞ を示すには δ(0) < M < +∞ となる定数 M が存在すると仮定して
上式両辺から
∫
δ(x)dx = 2δ(0)
1=
−
となり、 がいくらでも小さくできることから δ(0) < M に矛盾し®が示せます。以上の結果
から¯も自然に示されます。
∫x
これらは一点分布の累積分布関数 H(x) = −∞ δ(x0 )dx0 の性質から示すこともできます。
+∞
+1
図 3: デルタ関数(左)とヘヴィサイドステップ関数(右)
(
)
∫∞
∫∞
0
例えば −∞ δ(x)f (x)dx = [H(x)f (x)]∞
−∞ − −∞ H(x)f (x)dx = f (∞) − f (∞) − f (0) =
f (0) によりデルタ関数の定義が導入でき、f → xf で¬が示せます。H(x) − 21 が奇関数であ
ることから、その導関数 δ(x) が偶関数であること()が示せます。図を見れば®は明らか
(H(x) の傾きに注目)ですし、¯は H(x0 + b) − H(x0 + a) そのものです。
37
確率変数と確率分布
B
無色の緑色の考えは激しく眠る。
本編ですっぽかしていた確率論の基本事項について、こちらでカバーします。
確率空間 (Ω, F, P ) の構成
B.1
サイコロ投げを例に、「出目が となる確率」について考えてみましょう。
1. 全事象 Ω: サイコロの出目を全て集めた集合(全事象)は Ω = {1, 2, 3, 4, 5, 6} です。
2. σ 集合 F : 上記 に思いつく限りの言葉を入れてみましょう。
「出目が 1 となる確率」
「出目が偶数となる確率」
「出目が偶数以外となる確率」
「出目が素数かつ奇数となる確率」
「出目が 1, 2, 3, 4, 5, 6 のどれかとなる確率」
「出目が Ø(空集合)となる確率」
(=「出目が奇数かつ偶数となる確率」)
(=「出目が 2014 となる確率」)
.
..
.
..
言い出せば際限がありませんが、これらは適当にとった事象の集合 A, B ⊂ Ω に対し
「事象 A」
「余事象 Ā」
「和事象 A ∪ B 」
「積事象 A ∩ B 」
の 4 つを利用することでスッキリとまとめられます。適当に取った Ω の部分集合 A, B
に対し = A, Ā, A ∪ B, A ∩ B などと取るように考えるわけです。
以下では としてふさわしいものの集合 F を次にように取ると約束しましょう。
σ 集合(あるいは σ 加法族)
定義 B.1
全事象 Ω の部分集合族a F を次で定義する。このような F を σ 集合(σ 加法族)という。
• Ø, Ω ∈ F
• A ∈ F ならば Ā ∈ F
• A1 , A2 , · · · ∈ F ならば
∪
Ai ∈ F, かつ
i
∩
Ai ∈ F
i
ここで F に属する集合 A を可測集合と呼び、Ω と F の組み (Ω, F) を可測空間と言う。
a
F ⊂ 2Ω ということ。
3. 確率測度 P : 事象に対応する確率を定めます。
38
σ 加法性
定義 B.2
(Ω 上で定義された)F 上の確率測度 P を次の性質で定める。
• P (Ω) = 1
• Ai ∈ F かつ Ai ∩ Aj = Ø (i 6= j) ならば P
(∪
)
Ai
=
∑
i
P (Ai )
i
前者は任意の事象が起こる(何が起こっても良い)確率は 1 という意味で、(例えばサイ
コロを振ることを考えれば「1∼6 のどれかが出る確率=1」なので)自明な性質ですね。後
者は「和事象の確率は確率の和」という意味で、
「出目が 1 か 2 である確率」は「出目が 1 で
ある確率」と「出目が 2 である確率」の和であるという、これまた自明の性質です。
これらをまとめ、確率論の議論のスタートとなる確率空間 (Ω, F, P ) が定まります。が、事
象の集合族 F と確率測度 P の紐付けができただけでは話は終わりません。期待値や分散は確
率変数を通じて計算されていたのでした。今度は事象と確率変数との紐づけを行いましょう。
確率測度は F 上で定義されているので、確率変数は F と紐づいている(確率変数の逆像
が可測集合である)必要があります。そこで、あらためて確率変数であることの定義が次の
ように決まります。
確率変数であるということ(F 可測)
定義 B.3
X : Ω → R が確率変数であるとは、任意の実数 x に対して次が成り立つことを言う。
{X ≤ x} = {ω ∈ Ω|X(ω) ≤ x} ∈ F
|
{z }
下図の灰色の楕円
事象 ω このとき、X は F-可測であるとも言う。
全事象の集合Ω
ボレル集合 B
実数 R
確率測度
事象ω
PX(B)=P(ω)
確率変数 X(ω)
図 4: 模式図:ω = X −1 (B) より P (ω) = P (X −1 (B)) = P ◦ X −1 (B) ∈ [0, 1]
図に示したボレル集合とは、実数上の必ずしも σ 加法族ではない実数 R 上の区間を肉付
け(足りない元を追加)して σ 加法族にしたものを表します。
生成される σ 集合族
定義 B.4
与えられた事象 Ω の σ 集合族ではない部分集合族 C に対して、C を含む Ω 上の最小の σ
集合族を σ(C) を C から生成された σ 集合族と呼ぶ。特に実数 R 上の区間 C R から生成
される σ 集合族 σ(C R ) をボレル集合族と言い、その要素をボレル集合と言う。
これで分布関数 FX (x) = P (X ≤ x) が定義できるようになりました。
39
B.2
収束性についての補足
確率変数 (列) の収束性には様々あり、状況ごとに使い分けが必要ですが本編ではあまり気
にせずに論じてきました。ここではそのフォローとして種々の収束性とその違いについて簡
単に整理します。
分布収束
定義 B.5
確率変数列 Xn の従う確率分布の累積分布関数列 {Fn (x)} と確率変数 X の従う確率分布
の累積分布関数 F (x) に対し、 lim Fn (x) = F (x) が任意の x で成り立つとき、Xn は X
n→∞
に分布収束するといい、次のように書く。
d
Xn → X
確率変数の収束性というよりは、確率分布(あるいは累積分布関数)の収束性という感じ
d
がしますが、それは決して気のせいではありません。Xn の分布収束性 Xn → X を仮定する
と、任意の g(x) と Xn の確率密度 fn (x) に対して、
∫ ∞
|E[g(X)] − E[g(Xn )]| ≤
|f∞ (x) − fn (x)| · |g(x)|dx → 0
−∞
が成り立ち、次の収束性に導かれます。
法則収束
定義 B.6
任意の関数 g(x) に対して
lim E[g(Xn )] = E[g(X)]
n→∞
が成り立つとき、Xn は X に法則収束あるいは弱収束するといい、次のように書く。
w
Xn → X
ヘヴィサイドのステップ関数を用いて g(Xn ) = H(x − Xn ) とでもおいてやれば、
∫ ∞
E[g(Xn )] =
H(x − y)fn (y)dy = Fn (x)
−∞
と書けるので、『法則収束 (⇒) 分布収束』が導け、けっきょく両者は同等の概念であること
がわかります。また、良く知られた事実に『弱収束 (⇔) 特性関数が各点収束』があります
が、これは任意の
g(Xn ) をフーリエ変換(周期関数ならフーリエ展開)すれば E[g(Xn )] =
∫ ∞
1
dtg̃(t)E[eitXn ] と書けることから簡単にわかります。ちなみに、中心極限定理で主張
2π −∞
した収束性がちょうどこの法則収束に当たります。
注目すべきは、これらの収束性が確率変数そのものではなく、確率分布や特性関数の収束
よりしろ
性を 憑代にして示される性質であるという点です。そこで確率変数そのものの収束性という
ものを定義したくなりますが、これにはじゃっかん準備が必要となるので、しばらくそれは
保留して、もう少し他の収束性のバリエーションについて眺めてみましょう。
大数の法則(弱法則)を示す際に使用した収束性に注目してみます。
40
確率収束
定義 B.7
任意の ε > 0 と、確率変数列 Xn 、確率変数 X に対して
lim P (|Xn − X| > ε) = 0
n→∞
が成り立つとき、Xn は X に確率収束すると言い、次のように書く。
P
Xn → X あるいは p lim Xn = X
n→∞
チェビシェフの不等式を応用するために定めた収束性ですが、『確率収束 (⇒) 弱収束』が
成り立つ一方で逆は成立しません。確率収束が弱収束より上位の収束性であることはわかり
ますが、さらに上位の収束性があります。マルコフの不等式(定理 1.4)
P (ϕ(X) ≥ a) ≤
E[ϕ(X)]
a
で ϕ(X) → Xn − X, a → ε2 とすると
[
]
E |Xn − X|2
P (|Xn − X| > ε) ≤
ε2
と書けることから、
(右辺)→ 0 とすれば確率収束の上位概念である次の収束性に導かれます。
平均二乗収束
定義 B.8
確率変数列 Xn 、確率変数 X に対して
lim E[(Xn − X)2 ] = 0
n→∞
が成り立つとき、Xn は X に平均二乗収束すると言い、次のように書く。
MS
Xn → X あるいは l.i.m.Xn = X
n→∞
MS は Mean Square Limit(平均二乗極限)を意味します。例えば式 (2.1) で取り上げた
(dBt )2 = dt も、E[(dBt )2 ] = dt に注意すれば
[
]
(
)2
lim E (dBt )2 − dt
= lim E[(dBt )4 ] − (dt)2 = lim 2(dt)2 = 0
dt→0
dt→0
dt→0
[
]
となることから示される性質です。また、これを拡張した E |Xn − X|r → 0 を平均 r 乗収
束と言います。
ここまでの内容を整理しておきましょう。
確率変数の収束性
まとめ 各収束性について次が成り立つ。
平均二乗収束 (⇒) 確率収束 (⇒) 弱収束 (⇔) 法則収束
MS
−→ (⇒)
P
−→ (⇒)
w
d
−→ (⇔) −→ ここまでは分布や期待値の収束性で確率変数の収束を表現しようとしてきましたが、最後
に確率変数自身の収束性を定めます。
41
概収束
確率変数列 Xn 、確率変数 X に対して
lim P (Xn → X) = 1
n→∞
が成り立つとき、Xn は X に概収束する(確率 1 で収束する)と言い、次のように書く。
a.s.
Xn → X
42
条件付き確率とマルチンゲール
C
人間が頭で考えることは、すべて実現可能である。
確率過程の応用を見据えると、来し方がわかっている確率変数の行く末を調べるというシー
ンが様々な局面で現れます。ここでは条件付き確率の性質に立脚し、マルチンゲールの理解
を目指しましょう。
C.1
条件付き確率
以下では全事象 Ω に対して A, B ⊂ Ω とします。
条件付き確率
定義 C.1
事象 A, B に対し「事象 A が起こった条件のもとで事象 B が起こる条件つき確率」P (B|A)
を次の式で定める。
P (A ∩ B)
P (B|A) =
P (A)
上の式を書き換えただけですが、P (B|A)P (A) = P (A ∩ B) が成り立つことを乗法定理と呼
びます。事象 A が起こる確率 P (A) に対し、事象 A が起こらないことを Ā で表し、事象 A
が起こらない確率を P (Ā) で表しましょう。このとき、乗法定理から
P (B|A)P (A) = P (A ∩ B)
(C.1)
P (B|Ā)P (Ā) = P (Ā ∩ B)
(C.2)
が成り立ち、P (B) = P (A ∩ B) + P (Ā ∩ B) と書けることから、次の主張にたどり着きます。
ベ イ ズ
Bayesの定理
定理 C.2
次が成り立つ。
P (A|B) =
P (A) · P (B|A)
P (A) · P (B|A) + P (Ā) · P (B|Ā)
要するに P (A|B) を P (B|A) で表したいわけです。P (A∩B) = P (B)P (A|B) = P (A)P (B|A)
と言っていることはほとんど変わりません。
ちなみに、先ほどの P (B) = P (A ∩ B) + P (Ā ∩ B) という式について、全事象を A と Ā
で分割するのではなく、全事象を互いに素な事象列44 Ai で分割してやることで、次の性質
が成り立つことがわかります。
全確率の公式
定理 C.3
全事象を互いに排反に分割して作られた Ai に対して次が成り立つ。
P (B) =
∑
P (B|Ai )P (Ai )
i
これで条件付き期待値が定義できるようになりました。
44
Ai が互いに排反 ⇔ Ai ∩ Aj = Ø (i 6= j)
43
条件付き期待値
定義 C.4
事象 A が起こったもとでの確率変数 X の条件付き期待値を次で定める。
1
E[X|A] =
P (A)
これは指示間数 1A を
1
1A =
0
∫
X −1 ∈A
xfX (x)dx
A が起こっている
A が起こっていない
E[1A X]
とも書けます。また、これによって互いに排反45 な事象
P (A)
Aj (j = 1, 2, · · · , n)に対して次が成り立ちます。
と定義した上で E[X|A] =
E[X] =
n
∑
E[X|Aj ]P (Aj )
j=1
一方で、E[X|Y ] や E[X|G] のように条件付き期待値を表示する場合もあり、こちらは具体
的な事象の発生を前提とせず、Y や G についての確率変数という意味を持っています。
例えば X を F-可測とし、G ⊂ F となる σ 加法族 G を取ります。このときに E[X|G] を G
が与えられたもとでの条件付き期待値と呼びます。もう少し具体的に書き表す際に EX []
を確率変数 X についての期待値を表すとし、Y を G 可測としましょう。このとき EX [X|Y ]
と書けば Y についての確率変数であることが一目瞭然となります。
見かけ上、X|Y を条件付きの確率変数とみなせば、先の条件付き確率の定義から
fX|Y (x|y) =
fXY (x, y)
fY (y)
と書くことができます。
期待値は条件付き期待値の期待値
補題 C.5
次が成り立つ。
[
]
E[X] = EY EX [X|Y ]
∵ 右辺は
∫
∫
dyE[X|Y ≤ y]fY (y) =
EY [EX [X|Y ]] =
::::::::::::
∫
=
∫
dy
∫
dy
dxxfX|Y (x|y)fY (y)
::::::::::::::::
dxxfXY (x, y) = E[X]
となり、左辺に一致します。
こういったものを考える背景のひとつとして
確率変数 Y を手がかりにしたとき、確率変数 X の最良の近似は何か?
(それを Y の関数 g(Y ) として表すとどうなるか?)
45
A ∩ B = Ø ⇔ P (A ∩ B) = 0 ⇔ A, B 排反
44
(
)2
といった問題意識が挙げられます。E[ X − g(Y ) ] を最小にする g(Y ) を求めてみましょう。
条件付き期待値は確率変数の最良近似
定理 C.6
(
)2
g(Y ) = E[X|Y ] は X の最良の近似となる。すなわち、この g について E[ X − g(Y ) ]
が最小となる。
∵ g で (汎関数) 微分して E[X] = E[E[X|Y ]] を用います。E[g(Y )|Y ] = g(Y ) に注意して
)2
δ (
E[ X − g(Y ) ] = −2E[X − g(Y )]
δg
[
]
= −2E E[X − g(Y )|Y ]
[
]
= −2E E[X|Y ] − g(Y )
:::::::::::::::
[(
)2 ]
ここで波線部
= 0 とすれば E X − g(Y )
が最小化でき46 主張が示せました。
:::::::
これによって、例えば確率過程 Xt について時刻 s までの情報を手がかりにして、時刻 s 以
後の Xt について考える、という発想に辿り着きます。
C.2
フィルタ付き確率空間 {Ω, F, P, Ft } とマルチンゲール
Ω 上で定義された F は全ての時刻の情報を持った σ 加法族です。我々の狙いは F におい
て、時刻 t までの情報に制限して確率変数の行く末を占うことでした。そのために時刻が経
過する度に情報が追加されていく σ 加法族 Ft を考えるわけです。これをフィルトレーショ
ンと呼びます。
フィルトレーション
定義 C.7
時刻 t ≥ 0 に対して、σ 加法族 Ft ⊂ F の集まり {Ft } が、
s ≤ t のとき、Fs ⊂ Ft
をみたしているとき、{Ft } はフィルトレーション(あるいは増大情報系)であると言う。
確率過程 Xt が Ft -可測であるとき、Ft に適合していると言う。
フィルトレーション自体は抽象的な概念ですが、具体的には適合する(Ft -可測な)確率過
程 Xs の s ∈ [0, t] における軌道の情報が定まっているということです。使いどころとしては、
Xt が Ft に適合している際、
E[Xt |Ft ] = Xt
のように書きます。
例 1. Ft に適合している Bt に対し、t ∈ [0, T ] における次のブラウニアンブリッヂ Xt は Ft
に適合しているか。
t
Xt = Bt − BT
T
答. Ft からは Bs (s ∈ [0, t]) の軌道しかわかりません。これだけでは BT の値がわからないの
で Xt は Ft に適合していないことがわかります。
46
g の 2 次関数から下に凸なのは明らかでしょう。
45
∫
例 2. Yt = (T − t)
0
t
dBu
は Ft に適合しているか。
T −u
答. Yt は時刻 t 以前の Bu から構成されているので Ft -可測です。余談ですが Yt は先の Xt と
同じ性質を持つブラウニアンブリッヂになっており、フィルトレーションと適合して
いるという意味においてこちらの方が使い勝手の良いものになっています。
マルチンゲール
定義 C.8
確率過程 Xt が Ft -可測であり(Ft に適合)、かつ s ≤ t において
E[Xt |Fs ] = Xs
をみたしているとき、Xt は Ft -マルチンゲールであると言う。
フィルトレーションをいちいち記載する必要
Xt 軌道が既知 未知
のない場合は単にマルチンゲールとも言います。
上がる?
図のように確率過程 Xt について時刻 s までの
平均すると
Xs
軌道が既知のとき、s 以降の時刻 t における Xt
E[Xt |Fs ]=Xs
...... 変わらない
がどうなるかを考える際に、Xs より大きくなる
下がる?
のか小さくなるのかは(情報がないので)わか
s
t
らないが、平均すると Xs と変わらない(だろ
う)という仮定として用いられるのがこのマルチンゲールの性質です。未知の確率過程に対
して仮定するには制限が強い嫌いがありますが、様々な応用が知られており、非常に便利な
ツールとなります。以下ではブラウン運動や伊藤積分がこの性質をみたしていることを確か
めてみましょう。
例 3. Bt が Ft -可測とする。次の確率過程はマルチンゲールか。
∫ t
2
σB
t
(1)Bt (2)Bt (3)e
(4)
f (Bs , s)dBs
0
答. 独立増分性をどう使うかが肝になります。以下では s ≤ t とし、Bt − Bs が Bs と独立で
あるため、E[Bt − Bs |Fs ] = 0 が成り立ちます。
(1) E[Bt |Fs ] = E[Bt − Bs |Fs ] + E[Bs |Fs ] = Bs でありマルチンゲールです。
(2) 基本的には (1) と同じです。E[(Bt − Bs )2 |Fs ] = E[(Bt − Bs )2 ] = t − s に注意です。
E[Bt2 |Fs ] = E[(Bt − Bs + Bs )2 |Fs ]
= E[(Bt − Bs )2 |Fs ] + 2E[(Bt − Bs )Bs |Fs ] + E[Bs2 |Fs ]
= (t − s) + 0 + Bs2
となり、マルチンゲールではないことがわかります。ただし、この結果からわかるよ
うに :::::::::::::::::::::::::::::::::::::::
Bt2 − t はマルチンゲールとなります。
(3) これも基本的な考え方は同じです。ガウスのモーメント母関数の性質から E[eσ(Bt −Bs ) |Fs ] =
46
1
E[eσ(Bt −Bs ) ] = e− 2 σ
2 (t−s)
と書けることに注意すると
E[eσBt |Fs ] = E[eσ(Bt −Bs ) eσBs |Fs ]
= E[eσ(Bt −Bs ) |Fs ] · E[eσBs |Fs ]
1
= e− 2 σ
2 (t−s)
eσBs
となり、こちらもマルチンゲールにはなりません。しかしこの結果からわかるように
1
eσBt − 2 σ t はマルチンゲールとなります。
::::::::::::::::::::::::::::::::::::::::::
2
(4) 与式を It とおきます。
E[It |Fs ] = E[It − Is |Fs ] + E[Is |Fs ]
となり、右辺第 1 項については、s ≤ u ≤ t において
E[f (Bu , u)dBu |Fs ] = E[f (Bu , u)|Fs ] · E[dBu ] = 0
から 0 となり、一方右辺第 2 項は 0 ≤ u ≤ s において E[f (Bu , u)dBu |Fs ] = f (Bs , s)dBs
であることに気をつけると、
∫ s
∫ s
E[Is |Fs ] =
E[f (Bs , s)dBs |Fs ] =
f (Bs , s)dBs = Is
0
0
であることから、E[It |Fs ] = Is となり、伊藤積分がマルチンゲールであることがわか
ります。
1
例えば (3) に関連したネタとして、伊藤の指数関数 eBt − 2 t がマルチンゲールになるのは既
に触れた通りですが、伊藤の指数関数が次のように伊藤積分で
∫ t
1
1
eBs − 2 s = eBt − 2 t − 1
0
で書けること(伊藤積分はマルチンゲールという性質)から伊藤の指数関数がマルチンゲー
ルであることが示せます。(1) でも Bt2 − t が伊藤積分で
∫
Bt2
t
−t=2
Bs dBs
0
と書けることからマルチンゲールであることが示せます。これらの結果からどのようなマル
チンゲールが伊藤積分で表示できるのかが気になるところですが、重要な結果として次の定
理が知られています。
マルチンゲール表現定理
定理 C.9
Bt を Ft -可測とするとき、Ft -可測なマルチンゲール Mt は伊藤積分で表せる。つまり
∫
Mt = M0 +
t
Ns dBs
0
が成り立つ確率過程 Nt が一意に存在する。
言い換えればブラウン運動から作られたマルチンゲールは確率積分で表せるという主張で
あり、この限りにおいてこれは自明でしょう。2 変数関数 f (x, t) に対して Mt = f (Bt , t) と
47
∂
f (Bt , t) と構成すればよいのは明らかです。ここではそれ以
∂x
外の取り方がないこと(一意性)だけ示しておきます。
∵ (一意であることの証明)
一意でないと仮定する。つまり互いに異なる Ns , Ns0 について
取ることができれば、Nt =
∫
t
Mt = M0 +
Ns dBs
¬
Ns0 dBs
0
∫
t
Mt = M0 +
0
が成り立つとすると、¬ − = 0 であり、E[(¬ − )2 ] = 0 が成り立つことを踏まえてこの
左辺を計算すると、伊藤積分の等長性から
[( ∫
E
t
(Ns −
Ns0 )dBs
)2 ]
∫
=
0
t
[
]
E (Ns − Ns0 )2 ds ≥ 0
0
であり、不等式の等号が成り立つときは Ns = Ns0 で仮定に矛盾。
48
D
ブラウン運動の微分不能性
予期しないことが起きる。そこで独創性が問われる。
ここまで遠回りしてきましたが、以下の主張は非常に重要です。
Paley-Wiener-Zygmund の定理
定理 D.1
t 7→ Bt はほとんど確実に至る所で微分できない。
初等的な説明としてよく用いられるのが、
(dBt )2 = dt による証明です。Bt が微分可能で
dBt ≤ δ となる δ < +∞ が任意の dt > 0 について成り立つと仮定し、両
ある、すなわち、
dt 辺を二乗して dt を十分小さくとると
dBt 2
1
2
dt ≈ dt ≤ δ
となって、dt をいくらでも小さくできることから δ < +∞ に矛盾をきたします。任意の時刻
t でこうなのだから、Bt は至る所で微分不能であろうという論理です。
しかし、これは微分係数が有限値で押さえられない(Bt のある時刻における傾きは(確率
変数なので)色々な値を取りうるだろう。0 かもしれないし、1 かも知れない。しかし『どん
なに大きくてもこれくらい』と断言することはできない)ということを言っているだけなの
で、必ずしも微分不能であることを示せたわけではありません。
∵ ここではブラウン運動を Bt → B(t) のように書くとし、t ∈ [0, 1] とする。適当な β > 0
dBt 0
について、ある点 s ∈ [0, 1] でのパスの微係数 B (s) =
の絶対値が β より小さいとす
dt t=s
1
る。これより、十分大きな n について |B(t) − B(s)| ≤ β|t − s|, |t − s| ≤ と書ける。
n
ここで、k を nk ≤ s となる最大の整数とすると、 nk < s < k+1
n より、
(
(
)
(
) (
)
)
3β
k
+
1
k
+
2
k
+
2
k
+
1
≤ B
B
−B
− B(s) + B
− B(s) ≤
n
n
n
n
n
( )
(
)
( ) (
)
B k + 1 − B k ≤ B k + 1 − B(s) + B k − B(s) ≤ 2β
n
n n
n
n
( )
(
(
) ( )
)
3β
k
k
−
1
k
k
−
1
B
≤ B
−B
− B(s) + B
− B(s) ≤
n
n
n
n
n
3β
となる。ここで、
n
{
}
1
An ≡ B(u)|B(t) − B(s)| ≤ β|t − s|, |t − s| ≤
n
}
{
n−2
∪
3β
Bn ≡
B(u)yk ≤
n
となるため、上三式の最大値を yk とおくと yk ≤
k=1
とおくと、An , Bn は単調減少列で、An ⊂ Bn であるから、 lim P (Bn ) = 0 が示されれば、
n→∞
49
lim P (An ) = 0 となり、題意が示せる。ここで
n→∞
( n−2
})
∪{
3β
P (Bn ) = P
B(u)yk ≤
n
k=1
{
}
)
n−2
∑ (
( k+2 )
( k+1 ) ( k+1 )
( k ) ( k )
( k−1 )
3β
≤
P max B n − B n , B n − B n , B n − B n ≤
n
k=1
(
{
}
)
(
)
( k+1 ) ( k+1 )
( k ) ( k )
( k−1 )
, B
≤ 3β
≤ nP max B k+2
−
B
−
B
n
n
n
n , B n −B n
n
(
)
( k+2 )
( k+1 ) 3β ( k+1 )
( k ) 3β ( k )
( k−1 ) 3β
= nP B n − B n ≤ n , B n − B n ≤ n , B n − B n ≤ n
( (
)
( k+1 ) 3β ) ( ( k+1 )
( k ) 3β ) ( ( k )
( k−1 )
≤
B
≤
B
≤
= nP B k+2
−
B
P
−
B
P
−
B
n
n
n
n
n
n
n
n
(√ ∫ 3β
)3
(√
)3
∫ 3β
nx2
x2
n
n
1
− 2
− 2n
=n
e
dx = n
e
dx → 0
2π − 3β
2πn −3β
n
より所望の結果が得られる。
50
3β )
n
参考文献
[1] I.Karatzas, S.E.Shreve “Brownian Motion and Stochastic Calculus” (SpringerVerlag,1988,1991) (渡邉寿夫訳『ブラウン運動と確率積分』(シュプリンガー・ジャパ
ン,2001))
[2] S.E.Shreve “Stochastic Calculus for Finance II Continuous-Time Models” (SpringerVerlag, 2004)(長山いづみ他訳『ファイナンスのための確率積分 II 連続時間モデル』
(シュプリンガー・ジャパン,2008))
[3] 藤田岳彦『ファイナンスの確率解析入門』(講談社,2007)
[4] B.Øksendal “Stochastic Differential Equations An Introduction with Appliations”(1998,Springer)(谷口説男訳「確率微分方程式」2004, シュプリンガージャパン)
[5] T.Mikosh “Elementary Stochastic Calculus with Finance in Veiw”(1999,World Scientific)(遠藤靖訳『ファイナンスのための確率微分方程式』
(2000, 東京電機大学出版局))
[6] Alison Etheridge”A Course in Finacial Calculs”(Cambridge Universoty Press,2002)
(遠藤靖訳『ファイナンスの数理』(2005, 東京電機大学出版局))
[7] R.Durrett “Essentials of Stochastic Processes”(1999,Springer)(今野紀雄訳「確率過程
の基礎」2006, シュプリンガージャパン)
[8] P.Bremaud”An Introduction to Probabilistic Modeling”(Springer-Verlag) (釜江哲郎
監修・向井久訳『新装版 モデルで学ぶ確率入門』(2004, シュプリンガージャパン))
51
© Copyright 2026 Paperzz