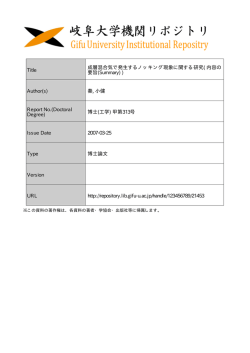
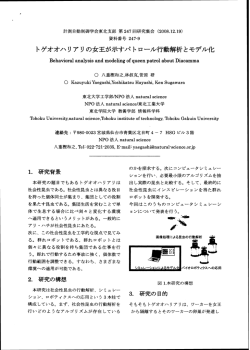
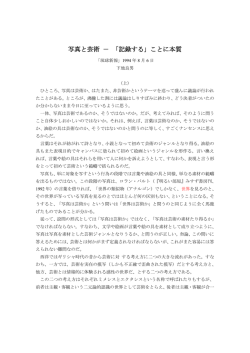
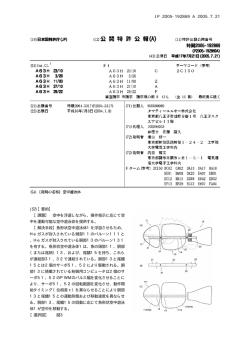
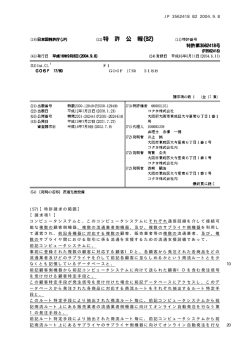
〔実 12 頁〕 公開特許公報(A) (19)日本国特許庁(JP) (12) (11)特許出願公開番号 特開2015-177761 (P2015−177761A) (43)公開日 平成27年10月8日(2015.10.8) (51)Int.Cl. FI テーマコード(参考) A01D 25/04 (2006.01) A01D 25/04 2B072 A01D 75/00 (2006.01) A01D 75/00 C 2B085 審査請求 未請求 (21)出願番号 特願2014-56751(P2014-56751) (22)出願日 平成26年3月19日(2014.3.19) 請求項の数5 OL (全16頁) (71)出願人 000006781 ヤンマー株式会社 大阪府大阪市北区茶屋町1番32号 (74)代理人 100080160 弁理士 松尾 憲一郎 (74)代理人 100149205 弁理士 (72)発明者 宗好 市川 泰央 紀彦 大阪府大阪市北区鶴野町1番9号 ヤンマ ー株式会社内 (72)発明者 福田 幸広 大阪府大阪市北区鶴野町1番9号 ヤンマ ー株式会社内 最終頁に続く (54)【発明の名称】ねぎ収穫機 (57)【要約】 【課題】搭乗用ステップ部に搭乗した作業者の立ち位置 において、各作業部の作業状況、さらには、ねぎの収穫 状況を、直後方から容易に視認することができるように して、ねぎと収穫部とに位置ズレが生じたとしても速や かに対処が可能なねぎ収穫機を提供すること。 【解決手段】収穫部は、各作業部として、ねぎを掘り起 こす掘り起こし部と、掘り起こし部により掘り起こした ねぎを後方へ搬送する搬送部と、搬送部により搬送しな がらねぎの根茎部に付着している土塊を掻き落とす掻き 落とし部と、を具備する。各作業部は、走行機体の前方 において、前後方向に延伸する仮想同一直線上に配設し た。走行機体には、作業者が搭乗する搭乗用ステップ部 を、各作業部の後方で、かつ、仮想同一直線上に配設し た。 【選択図】図1 ( 2 ) JP 1 2015-177761 A 2015.10.8 2 【特許請求の範囲】 1に開示されたねぎ収穫機は、各作業部として、ねぎを 【請求項1】 栽培している畝からねぎを掘り起こす掘り起こし部と、 自走可能な走行機体に、ねぎを栽培している畝からねぎ 掘り起こし部で掘り起こしたねぎを後方へ搬送する搬送 を掘り起こして収穫する収穫部を備えたねぎ収穫機であ 部と、搬送部により搬送しながらねぎの根茎部に付着し って、 ている土塊を掻き落とす掻き落とし部と、掻き落とし部 収穫部は、各作業部として、ねぎを掘り起こす掘り起こ により付着土塊が掻き落とされたねぎを収集する収集部 し部と、掘り起こし部により掘り起こしたねぎを後方へ とを具備しており、機体の右側後部には、作業者が搭乗 搬送する搬送部と、搬送部により搬送しながらねぎの根 する搭乗用ステップ部と、その搭乗用ステップ部上に作 茎部に付着している土塊を掻き落とす掻き落とし部と、 を具備するとともに、 業者が搭乗して操作する操作部が設けられている。 10 【先行技術文献】 各作業部は、走行機体の前方において、前後方向に延伸 【特許文献】 する仮想同一直線上に配設し、 【0003】 走行機体には、作業者が搭乗する搭乗用ステップ部を、 【特許文献1】特開2003−310021号公報 各作業部の後方で、かつ、仮想同一直線上に配設したこ 【発明の概要】 とを特徴とするねぎ収穫機。 【発明が解決しようとする課題】 【請求項2】 【0004】 搬送部は、前低後高の傾斜状に配置して、掘り起こした ところが、上記したねぎ収穫機では、搭乗用ステップ部 起立姿勢のねぎの中途部を挟持した状態で後上方へ向け 上に搭乗した作業者が操作部を操作することは容易に行 て搬送するようにしたことを特徴とする請求項1記載の えるものの、作業者の立ち位置が機体の右側部に偏倚し ねぎ収穫機。 20 ているため、ねぎの掘り起こしから付着土塊の掻き落と 【請求項3】 しに至るまでのねぎの搬送工程を右側後方から斜めに視 搬送部の直後方位置には、搬送部により起立姿勢で後上 認することになって、ねぎが各作業部において左右方向 方へ向けて搬送されるねぎを受け継いで、受け継いだね に位置ズレしていたとしても確認し辛い。そのため、位 ぎを起立姿勢から外側方へ傾斜した傾倒姿勢に姿勢変更 置ズレが原因でねぎが損傷等さているとしても速やかな するとともに、整列させる姿勢変更・整列部を配設し、 対処ができないという不具合がある。 姿勢変更・整列部は、ねぎを姿勢変更・整列しながら一 【0005】 側後上方へ向けて搬送するようにしたことを特徴とする そこで、本発明は、収穫部の各作業部と搭乗用ステップ 請求項1又は2記載のねぎ収穫機。 部を前後方向に延伸する仮想同一直線上に配設すること 【請求項4】 で、搭乗用ステップ部に搭乗した作業者の立ち位置にお 姿勢変更・整列部の後下方位置には、ねぎを収集する板 30 いて、各作業部の作業状況、さらには、ねぎの収穫状況 状の収集部を配設して、姿勢変更・整列部により姿勢変 を、直後方から容易に視認することができるようにして 更・整列されたねぎが収集部に収集されるようにしたこ 、ねぎと収穫部とに位置ズレが生じたとしても速やかに とを特徴とする請求項3記載のねぎ収穫機。 対処が可能なねぎ収穫機を提供することを目的とする。 【請求項5】 【課題を解決するための手段】 搭乗用ステップ部を間に挟んで、収集部を配設した側と 【0006】 は反対側に走行機体及び各作業部を操作するための操作 請求項1記載の発明は、 部を配設したことを特徴とする請求項4記載のねぎ収穫 自走可能な走行機体に、ねぎを栽培している畝からねぎ 機。 を掘り起こして収穫する収穫部を備えたねぎ収穫機であ 【発明の詳細な説明】 【技術分野】 って、 40 収穫部は、各作業部として、ねぎを掘り起こす掘り起こ 【0001】 し部と、掘り起こし部により掘り起こしたねぎを後方へ 本発明は、ねぎ収穫機、詳しくは、ねぎを栽培している 搬送する搬送部と、搬送部により搬送しながらねぎの根 畝からねぎを掘り起こして収集するまでの一連の収穫作 茎部に付着している土塊を掻き落とす掻き落とし部と、 業を可能としたねぎ収穫機に関する。 を具備するとともに、 【背景技術】 各作業部は、走行機体の前方において、前後方向に延伸 【0002】 する仮想同一直線上に配設し、 従来、ねぎ収穫機の一形態として、特許文献1に開示さ 走行機体には、作業者が搭乗する搭乗用ステップ部を、 れたものがあり、特許文献1には、機体に各作業部を配 各作業部の後方で、かつ、仮想同一直線上に配設したこ 設して、ねぎを収穫するまでの一連の収穫作業を可能と とを特徴とする。 したねぎ収穫機が開示されている。すなわち、特許文献 50 【0007】 ( 3 ) JP 3 2015-177761 A 2015.10.8 4 請求項1記載の発明では、収穫部の各作業部と搭乗用ス 【0012】 テップ部を前後方向に延伸する仮想同一直線上に配設し 請求項4記載の発明は、請求項3記載の発明であって、 ているため、搭乗用ステップ部に搭乗した作業者の立ち 姿勢変更・整列部の後下方位置には、ねぎを収集する板 位置において、各作業部の作業状況、さらには、ねぎの 状の収集部を配設して、姿勢変更・整列部により姿勢変 収穫状況を、直後方から容易に視認することができる。 更・整列されたねぎが収集部に収集されるようにしたこ したがって、ねぎと収穫部とに位置ズレが生じていたと とを特徴とする。 しても速やかに対処することができる。例えば、ねぎを 【0013】 栽培している畝に対して掘り起こし部を進入させる走行 請求項4記載の発明では、搭乗用ステップ部に搭乗した 機体の位置を調整する等の対処を速やかに行うことがで 作業者の立ち位置の一側方において、姿勢変更・整列部 きる。その結果、ねぎと収穫部との位置ズレによるねぎ 10 により姿勢変更されたねぎが板状の収集部上に自動的に の損傷を低減することができる。 落下して収集さらには貯留されるため、種々の操作を行 【0008】 っている作業者に収集作業が支障となることがない。そ 請求項2記載の発明は、請求項1記載の発明であって、 の際、収集部上にはねぎが整然と収集されるため、作業 搬送部は、前低後高の傾斜状に配置して、掘り起こした 者は、収集されたねぎの収集姿勢を修正する等の手間が 起立姿勢のねぎの中途部を挟持した状態で後上方へ向け 不要となる。したがって、この点からも収穫作業能率の て搬送するようにしたことを特徴とする。 向上と作業者の疲労低減を図ることができる。 【0009】 【0014】 請求項2記載の発明では、掘り起こされたねぎが搬送部 請求項5記載の発明は、請求項4記載の発明であって、 により後上方へ向けて搬送されるため、その直後方にお 搭乗用ステップ部を間に挟んで、収集部を配設した側と いて搭乗用ステップ部に搭乗した作業者は、搬送部によ 20 は反対側に走行機体及び各作業部を操作するための操作 るねぎの搬送状況を堅実に視認することができる。その 部を配設したことを特徴とする。 ため、例えば、ねぎと掘り起こし部との左右方向の位置 【0015】 ズレや、掘り起こし部による掘り起こし深さのズレ等を 請求項5記載の発明では、収集部を配設した側とは反対 容易に確認することができる。したがって、ねぎと収穫 側に操作部を配設しているため、操作部が作業者の前方 部とに位置ズレが生じたとしても速やかに対処すること 視界を遮ることない。したがって、この点からも収穫作 ができる。その結果、ねぎと収穫部との位置ズレによる 業能率の向上を図ることができる。 ねぎの損傷を低減することができる。 【発明の効果】 【0010】 【0016】 請求項3記載の発明は、請求項1又は2記載の発明であ 本発明によれば、収穫部の各作業部と搭乗用ステップ部 って 30 を前後方向に延伸する仮想同一直線上に配設することで 搬送部の直後方位置には、搬送部により起立姿勢で後上 、搭乗用ステップ部に搭乗した作業者の立ち位置におい 方へ向けて搬送されるねぎを受け継いで、受け継いだね て、各作業部の作業状況、さらには、ねぎの収穫状況を ぎを起立姿勢から外側方へ傾斜した傾倒姿勢に姿勢変更 、直後方から容易に視認することができるようにして、 するとともに、整列させる姿勢変更・整列部を配設し、 ねぎと収穫部とに位置ズレが生じたとしても速やかに対 姿勢変更・整列部は、ねぎを姿勢変更・整列しながら一 処が可能なねぎ収穫機を提供することができる。 側後上方へ向けて搬送するようにしたことを特徴とする 【図面の簡単な説明】 。 【0017】 【0011】 【図1】本実施形態のねぎ収穫機の斜視図。 請求項3記載の発明では、姿勢変更・整列部がねぎを起 【図2】本実施形態のねぎ収穫機の斜視説明図。 立姿勢から傾倒姿勢に姿勢変更しながら整列させて、一 40 【図3】本実施形態のねぎ収穫機の左側面説明図。 側後上方へ向けて搬送するようにしているため、搭乗用 【図4】本実施形態のねぎ収穫機の右側面説明図。 ステップ部に搭乗した作業者の立ち位置の一側方へねぎ 【図5】本実施形態のねぎ収穫機の平面説明図。 が傾倒姿勢で整列されて移行される。そのため、作業者 【図6】本実施形態のねぎ収穫機の正面説明図。 はねぎの全体を容易に確認することができる。また、ね 【図7】本実施形態のねぎ収穫機の断面左側面説明図。 ぎが作業者に接近する方向である一側後上方へ向けて搬 【図8】本実施形態のねぎ収穫機の背面図。 送されるため、作業者はねぎを身近で触ることもできる 【図9】掻き落とし部の斜視説明図。 。そのため、作業者は、ねぎに残された付着土塊を落と 【図10】掻き落とし部のねぎの搬送方向からの正面説 す等の調整作業を、前方を視認したまま容易に行うこと 明図。 ができる。したがって、収穫作業能率の向上と作業者の 【図11】掻き落とし部の左側面説明図。 疲労低減を図ることができる。 50 【図12】動力伝達機構の概念説明図。 ( 4 ) JP 5 2015-177761 A 2015.10.8 6 【発明を実施するための形態】 に間隔をあけて、前低後高の傾斜状に平行させて配置さ 【0018】 れた掘り起こし部20と搬送部21の直後方位置に起立 以下に、本発明の実施形態について図面を参照しながら することができる。したがって、作業者Opは、掘り起 説明する。すなわち、図1∼図7に示すAは、本実施形 こし部20と搬送部21の間の搬送空間及び搬送部21 態としてのねぎ収穫機であり、まず、ねぎ収穫機Aの全 の直上方の搬送空間において、収獲されたねぎNが作業 体構成を概略的に説明する。 者Opの視線Lsに沿って直前下方位置から作業者Op 【0019】 に接近してくる方向に搬送されてくるのを、前方を視認 [ねぎ収穫機の全体構成の概略的な説明] する作業者Opの視界内で堅実に視認することができる ねぎ収穫機Aは、自走可能な走行機体1に、ねぎNを栽 。 培している畝UからねぎNを掘り起こして収穫する収穫 10 【0023】 部2を備えている。本実施形態では、ねぎNは、根茎部 収穫部2は、各作業部として、ねぎNを掘り起こす掘り Naと葉部Nbを有する長ねぎである。 起こし部20と、掘り起こし部20により掘り起こした 【0020】 ねぎNを後上方へ向けて搬送する搬送部21と、搬送部 走行機体1は、左右一対のクローラ式の走行部10,1 21により搬送しながらねぎNの根茎部Naに付着して 0間に立体枠状に枠組みして形成した機体フレーム枠体 いる土塊を掻き落とす掻き落とし部22と、搬送部21 11を架設している。機体フレーム枠体11の右側後部 から受け継いだねぎNを姿勢変更・整列しながら一側後 には、エンジン12を左側の走行部10の後上方に位置 上方(本実施形態では左側後上方)へ向けて搬送する姿 させて搭載するとともに、機体フレーム枠体11の下部 勢変更・整列部23と、を具備している。各作業部であ には、ミッションケース13を左右側の走行部10,1 る掘り起こし部20と搬送部21と掻き落とし部22は 0間に位置させて配設して、エンジン12にミッション 20 、走行機体1の前方において、前後方向に延伸する仮想 ケース13を連動連結している。機体フレーム枠体11 同一直線L上に配設しているとともに、これらの作業部 の右側上部には、走行部10,10の操向・変速操作及 の後方で、かつ、仮想同一直線L上に走行機体1に設け び収穫部2の収穫操作をするための操作部14を配設し た搭乗用ステップ部24を配設している。 ている。機体フレーム枠体11の後端部には、作業者O つまり、走行機体1の左右中心線である仮想同一直線L pが搭乗する水平板状の搭乗用ステップ部24を、後述 上において、掘り起こし部20と搬送部21と掻き落と する収穫部2の各作業部の後方で、かつ、仮想同一直線 し部22と搭乗用ステップ部24とを、前後方向に一列 L上において、後方へ向けて張り出し状に配設している に配設している。 。仮想同一直線Lは、図5に示すように、走行機体1の 【0024】 左右幅の中央部において、前後方向に延伸する仮想の直 掘り起こし部20は、機体フレーム枠体11に、前後方 線である。15は主変速レバー、16は走行・作業レバ 30 向に延伸させて形成した四角形枠状の支持枠体30の基 ー、17は左サイドクラッチレバー、18は右サイドク 端部を、左右方向に軸線を向けた枢軸31を介して枢支 ラッチレバー、19はアクセルレバーである。 し、支持枠体30上にいわゆるバーコンベアである掘り 【0021】 起こしコンベア32を載設し、掘り起こしコンベア32 搭乗用ステップ部24は、前半部の固定側ステップ片9 の始端部(前端部)に掘り起こし刃33を前方へ向けて 4と、固定側ステップ片94の後端縁部に枢支連結部9 突設状に取り付けている。掘り起こし刃33は、板状に 6を介して前端縁部を枢支連結した後半部の可動側ステ 形成した基端側半部33aを前方へ向けて延設するとと ップ片95とから構成している。固定側ステップ片94 もに、先端側半部33bを基端側半部33aの前端縁部 は、機体フレーム枠体11の後端下部に設けたステップ から上方へ跳ね上げ状の先鋭な水平刃となしている。機 ステー97に前端縁部を固定して、後方へ向けて水平に 体フレーム枠体11に設けたシリンダステー35と、枢 張り出し状となしている。可動側ステップ片95は、後 40 軸31の中途部から上方へ向けて立設した昇降アーム3 方へ水平に張り出した使用姿勢P3と上方へ起立させた 6との間に、前後方向に伸縮作動する昇降シリンダ37 不使用姿勢P4との間で、枢支連結部96を中心に起到 を横架し、昇降アーム36の基端部と支持枠体30の左 方向eに回動させることで姿勢変更可能としている。 右延伸片30aとの間に連設片39を介設している。そ 【0022】 して、掘り起こし部20は、昇降シリンダ37により昇 このように、作業者Opが搭乗する水平板状の搭乗用ス 降作動可能としており、搬送部21と掻き落とし部22 テップ部24は、後述する収穫部2の各作業部の後方で も掘り起こし部20と一体的に昇降されるように構成し 、かつ、仮想同一直線L上において、機体フレーム枠体 ている。38は掘り起こし部20等を昇降操作するため 11の後端部に後方へ向けて張り出し状に配設している の昇降操作レバーである。 ため、作業者Opは、図7に示すように、搭乗用ステッ 【0025】 プ部24上に搭乗することで、後述するように上下方向 50 このように構成した掘り起こし部20では、ねぎNの収 ( 5 ) JP 2015-177761 A 2015.10.8 7 8 穫作業をする際には、昇降シリンダ37により掘り起こ ーム41は、右側の駆動軸ケース48と右側の搬送体4 し部20を適宜下降させて、掘り起こしコンベア32が 2の後部との間に介設している。左側の傾斜支持フレー 、前低後高の傾斜姿勢に配置されるとともに、掘り起こ ム46は、左側の搬送体42の前部と機体フレーム枠体 し刃33の先端側半部33bが、圃場G面に略水平に近 11の左側前部との間に斜交状に介設している。同様に 接配置されるようにする。このような状態にて、走行機 、右側の傾斜支持フレーム46は、右側の搬送体42の 体1の前進走行に伴って、掘り起こし刃33の先端側半 前部と機体フレーム枠体11の右側前部との間に斜交状 部33bが、ねぎNが栽培されている畝Uに対して、前 に介設している。49は搬送ベルト往路側部45aを弾 方へ向けて略水平に進入し、ねぎNの根茎部Naの直下 性付勢するテンションローラである。 方からねぎNを掘り起こすとともに、掘り起こし刃33 【0028】 の基端側半部33aがねぎNを後上方へ土塊D1ととも 10 このように構成した搬送部21では、左右一対の搬送体 に滑動移送させる。そして、掘り起こされたねぎNは、 42,42の搬送ベルト往路側部45a,45a同士がね 掘り起こし刃33の基端側半部33aの上面を滑動しな ぎNの葉部Nbを挟持するとともに、挟持した状態でね がら後上方へ移送されて、ねぎNの葉部Nbが後述する ぎNを後上方へ搬送するようにしているため、ねぎNの 搬送部21に挟持されて後上方へ搬送される一方、土塊 根茎部Naを下方から支持して搬送する掘り起こし部2 D1の付着したねぎNの根茎部Naが、掘り起こし刃3 0の掘り起こしコンベア32と協働して、ねぎNを起立 3の基端側半部33aから掘り起こしコンベア32上に した姿勢にて堅実に後上方へ搬送することができる。 受け渡されて、掘り起こしコンベア32によりさらに後 【0029】 上方へ搬送される。この際、ねぎNは、畝Uに栽培され 掻き落とし部22は、図9∼図11にも示すように、機 ている起立姿勢のまま後上方へ向けて搬送される。 体フレーム枠11に左右方向に延伸する横軸ケース50 【0026】 20 を横架し、横軸ケース50の右側部から前下方へ向けて 搬送部21は、掘り起こし部20の直上方において、掘 チェンケース51を延出させ、チェンケース51の先端 り起こし部20の掘り起こしコンベア32と平行させて 部(前端部)に軸ケース52を左側方へ向けて突設して 前低後高の傾斜状に配置して、掘り起こした起立姿勢の 、軸ケース52中に軸架した回転体支軸53の先端部に ねぎNの中途部を左右側方から挟持した状態で後上方へ 回転体54を同軸的に取り付けている。回転体54は、 向けて搬送するようにしている。すなわち、搬送部21 左右方向に軸線を向けた円筒状の周壁55と、周壁55 は、左右一対の前・後支持フレーム40,41及び傾斜 の左右側端面を閉塞する左右側端壁56,56とから形 支持フレーム46を介して掘り起こしコンベア32の直 成して、左右側端壁56,56の中心部に回転体支軸5 上方に平行に対向させて配設している。そして、搬送部 3の先端部を貫通させて取り付けている。つまり、回転 21は、前後方向に延伸する左右一対の搬送体42,4 体54は、搬送部21の搬送方向に対して直交する方向 2を配設して構成している。搬送体42は、前後方向に 30 に、その軸線を向けて配置するとともに、その軸線廻り 間隔をあけて配置した従動プーリ43と駆動プーリ44 に回転体支軸53を介して回転可能としている。 とに搬送ベルト45を巻回して形成している。左右に対 【0030】 向する両搬送体42,42の始端部(前端部)から終端 回転体54の周壁55の外周面には、その周方向と軸線 部(後端部)に向けて移送する搬送ベルト往路側部45 方向にそれぞれ間隔をあけて多数の掻き落とし用の突片 a,45a同士を対面状態で面接触させており、搬送ベ 57を放射状に突設するとともに、各突片57は、それ ルト往路側部45a,45a同士がねぎNの葉部Nbを らの先端部が根茎部Naに沿うように各突片57の突出 挟持するとともに、挟持した状態でねぎNを後上方へ搬 高さに変化をもたせている。すなわち、本実施形態では 送するようにしている。 、周壁55の外周面の周方向に同一間隔をあけて8個の 【0027】 突片を突設して突片ユニットを形成し、周壁55の軸線 左側の前支持フレーム40は、上下方向に延伸させて、 40 方向に同一間隔をあけてこの突片ユニットを5組形成し 掘り起こしコンベア32の左側部と左側の搬送体42の ている。 前部との間に介設している。同様に、右側の前支持フレ 【0031】 ーム40は、上下方向に延伸させて、掘り起こしコンベ 回転体54の外周面の中央部に突設した突片57aは、 ア32の右側部と右側の搬送体42の前部との間に介設 その突出幅を短幅に形成する一方、回転体54の外周面 している。後述する搬送部伝動横軸170を軸支する伝 の外側部に突設した突片57bは、その突出幅を中央部 動横軸ケース47の左右側部には、後述する左右一対の の突片の突出幅よりも長幅に形成して、根茎部Naの直 プーリ駆動軸85,85を軸支する左右一対の駆動軸ケ 下方と側方に沿ってそれぞれ各突片57a,57bの先 ース48,48を立設しており、左側の後支持フレーム 端部が位置するようにしている。本実施形態では中央部 41は、左側の駆動軸ケース48と左側の搬送体42の の3組を短幅の突片57aとするとともに、外側の2組 後部との間に介設している。同様に、右側の後支持フレ 50 を長幅の突片57bとしている。 ( 6 ) JP 9 2015-177761 A 2015.10.8 10 【0032】 列させるように配設して、ねぎNを姿勢変更・整列しな 回転体54の回転方向aは、突片57がねぎの根茎部N がら一側後上方(本実施形態では左側後上方)へ向けて aに付着した土塊D1に衝突する方向と、搬送部21の 搬送するようにしている。 搬送方向とが同一方向となるようにしている。本実施形 【0035】 態では、回転体54の回転方向を左側面視にて時計廻り すなわち、姿勢変更・整列部23は、前後方向に延伸す に設定して、突片57がねぎの根茎部Naに付着した土 る左右一対の移送体80,80を前低後高で、かつ、後 塊D1に衝突する方向と、搬送部21の後上方への搬送 端部が左側外方へ向くように配設して構成している。移 方向とが同一方向となるようにしている。回転体54の 送体80は、前後方向に間隔をあけて配置した駆動プー 回転速度は、搬送部21の搬送速度よりも大きくなるよ リ81と従動プーリ82とに移送ベルト83を巻回して うに設定している。例えば、回転体54の回転速度(周 10 形成しており、左右に対向する両移送体80,80の始 速度)を1m/sとし、搬送部21の搬送速度(周速度 端部(前端部)から終端部(後端部)に向けて移送する )を0.05m/sとして、回転体54の回転速度(周 移送ベルト往路側部83a,83a同士を対面状態で面 速度)が搬送部21の搬送速度(周速度)の20倍とな 接触させている。駆動プーリ81,81は、それらの軸 るように設定することができる。 線を上下方向に向けて配置する一方、従動プーリ82, 【0033】 82は、それらの軸線を左高右低の傾斜方向(例えば、 このように構成した掻き落とし部22では、搬送部21 45°)に傾けて配置して、移送ベルト往路側部83a と掘り起こしコンベア32とが協働して搬送してきたね ,83a同士の中途を捩り状に面接触させている。左側 ぎNの根茎分Naに付着している土塊D1の大部分を、 の搬送体42の駆動プーリ44と左側の移送体80の駆 回転体54の周壁に突設した多数の突片57により掻き 動プーリ81は、上下方向に軸線を向けて配置した左側 落として土塊D2とすことができる。この際、回転体5 20 のプーリ駆動軸85の上端部と中途部とに同軸的に取り 4は根茎分Naの下方において回転することで、土塊D 付けている。右側の搬送体42の駆動プーリ44は、上 1に多数の突片57が連続的に衝突(打撃)して、土塊 下方向に軸線を向けて配置した右側のプーリ駆動軸85 D1を砕くことで土塊D2さらには土塊D3となして、 の上端部にチェンケース86を介して連動連結するとと 根茎部Naに付着して残存する土塊D3を可及的に小型 もに、右側の移送体80の駆動プーリ81は、右側のプ 化させることができる。しかも、回転体54の外周面の ーリ駆動軸85の中途部に取り付けている。そして、搬 中央部に突設した突片57aは、その突出幅を短幅に形 送部21の終端部からねぎNを受け継いだ姿勢変更・整 成する一方、回転体54の外周面の外側部に突設した突 列部23は、移送ベルト往路側部83a,83a同士が 片57bは、その突出幅を中央部の突片の突出幅よりも ねぎNの葉部Nbを挟持するとともに、挟持した状態で 長幅に形成して、根茎部Naの直下方と左右側方に沿っ ねぎNを起立姿勢から傾到姿勢に姿勢変更させながら整 てそれぞれ各突片57a,57bの先端部が位置するよ 30 列させて、左側後上方へ搬送するようにしている。87 うにしているため、各突片57a,57bによりねぎN は姿勢変更・整列部23により移送されるねぎNの葉先 に干渉することなく、土塊D1を堅実に砕くことができ 側が垂れ下がらないように姿勢を保持する保持枠体であ る。つまり、突片57aは、根茎部Naの下方に付着し る。 ている土塊D1の下部に掻き落とし作用する一方、突片 【0036】 57bは、根茎部Naの左右側方に付着している土塊D このように構成した姿勢変更・整列部23では、ねぎN 1の左右側部に掻き落とし作用する。ここで、図10又 の搬送姿勢を起立姿勢から傾到姿勢に姿勢変更させるこ は図11における土塊D1は突片57が掻き落とし作用 とができるため、ねぎNを順次、かつ、堅実に後述する する前のブロック状の土塊、土塊D2は突片57が掻き 収集部25に収集・貯留させることができる。 落とし作用している際の小型化された土塊、土塊D3は 【0037】 突片57が掻き落とし作用した後の最終的な小型土塊を 40 姿勢変更・整列部23の後下方位置には、ねぎNを収集 示しており、土塊D1の下部に対して連続的に打撃して する四角形板状の収集部25を配設して、姿勢変更・整 掻き落とし作用する突片57aと、土塊D1の左右側部 列部23により姿勢変更・整列されたねぎNが収集部2 に対して連続的に打撃して掻き落とし作用する突片57 5に収集されるようにしている。そして、姿勢変更・整 bとの協働作用によって、土塊は土塊D1→土塊D2→ 列部23の終端部の下方に、収集部25の前端縁部を配 土塊D3と連続的にかつ堅実に砕かれる。 置して、姿勢変更・整列部23により搬送されたねぎN 【0034】 が収集部25上に落下されて収集・貯留されるようにし 姿勢変更・整列部23は、搬送部21の直後方位置に、 ている。 搬送部21により起立姿勢で後上方へ向けて搬送される 【0038】 ねぎNを受け継いで、受け継いだねぎNを起立姿勢から すなわち、収集部25は、機体フレーム枠11に収集部 外側方へ傾斜した傾倒姿勢に姿勢変更するとともに、整 50 支持アーム90を介して取り付けている。収集部支持ア ( 7 ) JP 11 2015-177761 A 2015.10.8 12 ーム90は、上下方向に軸線を向けた上下延伸アーム片 、取付円板64に突設した畝肩崩し爪65をアッパーカ 91と、上下延伸アーム片91の上端部から前後方向に ット方向bに回転させることで、畝肩崩し爪65により 軸線を向けた前後伸延アーム片92とから形成している 畝Uの肩部を崩すことができるようにしている。69は 。前後伸延アーム片92には、取付枠93を左側外方へ 飛散防止カバー、70は土塊粉砕棒である。71は収穫 張り出し状に設けて、取付枠93に収集部25の下面部 部2の前端部の対地高さを決めるゲージ輪、72はゲー を取り付けている。機体フレーム枠11の左側後端部に ジ輪支柱、73はゲージ輪支持機枠である。 は、上下方向に軸線を向けた円筒状支持部98を設けて 【0041】 おり、収集部支持アーム90は、円筒状支持部98中に 図12に示すMは、ねぎ収穫機Aが有する動力伝達機構 上下延伸アーム片91を上方から挿通して、その軸線廻 であり、動力伝達機構Mは、図12に示すように、走行 りに回動自在に取り付けている。図2に示すように、収 10 機体伝動機構部Maと収穫部伝動機構部Mbとから形成 集部25は、前後方向に軸線を向けた前後伸延アーム片 している。 92の横軸廻り方向cに横臥使用姿勢F1と、垂下不使 【0042】 用姿勢F2との間で姿勢変更可能とするとともに、上下 すなわち、走行機体伝動機構部Maは、次のように構成 方向に軸線を向けた上下延伸アーム片91の縦軸廻り方 している。機体フレーム枠11に搭載したエンジン12 向dに機体の一側方(本実施形態では左側方)に配置し の駆動軸12aと、油圧ポンプ100の入力軸101と た使用位置P1と、機体の直後方に垂下不使用姿勢F2 の間に、第1チェン伝動機構110を介設している。エ で配置した収納位置P2との間で位置変更可能としてい ンジン12の駆動軸12aと、機体フレーム枠11に設 る。したがって、搭乗用ステップ部24の可動側ステッ けた変速ケース120の入力軸121との間に、第2チ プ片95を上方へ起立させた不使用姿勢P4となすとと ェン伝動機構130を介設している。変速ケース120 もに、収集部25を、可動側ステップ片95の直後方位 20 の出力軸122の左側端部と、機体フレーム枠体11の 置にて垂下不使用姿勢F2で収納位置P2に配置するこ 下部に設けたミッションケース13の入力軸13aとの とで、ねぎ収穫機Aをコンパクトに格納することができ 間に、第1ベルト伝動機構140を介設している。ミッ る。また、収集部25を配設した左側とは反対側の右側 ションケース13の出力軸13bの両端部には走行部1 には、搭乗用ステップ部24を間に挟んで、走行機体1 0,10の駆動輪10a、10aを取り付けている。 及び収穫部2の各作業部を操作するための操作部14を 【0043】 配設している。 また、収穫部伝動機構部Mbは、次のように構成してい 【0039】 る。変速ケース120の出力軸122の右側端部と、横 このように構成した収集部25では、搭乗用ステップ部 軸ケース50中に軸架した収穫部伝動横軸150の右側 24上に起立して操向・収穫操作している作業者Opの 端部との間に、第2ベルト伝動機構160を介設してい 左側方において、収獲したねぎNを収集部25上に横臥 30 る。収穫部伝動横軸150の左側部にはウォームギヤケ 姿勢に山積みして堅実に収集することができるため、ね ース151を連動連設し、ウォームギヤケース151に ぎNの収集性能と作業者Opの操向・収穫操作性能を良 前方へ延出する伝動シャフト165を介して掘り起こし 好に確保することができる。 ギヤケース170を連動連結している。掘り起こしギヤ 【0040】 ケース178は、掘り起こしコンベア32の後部に横架 掘り起こし部20の前方には、収穫部2の一部である左 状に軸架した駆動軸34の左側端部に連動連結している 右一対の畝肩崩し装置60,60を配設している。畝肩 。伝動シャフト165の後部には、入・出力ギヤ171 崩し装置60,60は、畝Uの両肩部を崩して、後続の ,172を介して左右方向に軸線を向けた搬送部伝動横 掘り起こし部20の進入抵抗を軽減させることで、掘り 軸170の左側端部を連動連結し、また、入・出力ギヤ 起こし部20による掘り起こし作業がスムーズに行える ようにしている。すなわち、畝肩崩し装置60,60は 173,174を介して搬送部伝動横軸170の中途端 40 部に、左側のプーリ駆動軸85の下端部を連動連結し、 、横軸ケース50の左右側部に、前方へ向けて延伸する また、入・出力ギヤ175,176を介して搬送部伝動 前方延伸軸ケース61,61の基端部(後端部)を取り 横軸170の右側端部に、右側のプーリ駆動軸85の下 付け、各前方延伸軸ケース61,61の先端部(前端部 端部を連動連結している。左側のプーリ駆動軸85の上 )にギヤケース62,62を取り付け、ギヤケース62, 端部と中途部とには、左側の搬送体42の駆動プーリ4 62に円板支軸63,63を介して取付円板64,64を 4と左側の移送体80の駆動プーリ81を同軸的に取り 取り付けて、各取付円板64,64に4本ずつの畝肩崩 付けている。右側のプーリ駆動軸85の上端部には、チ し爪65,65を周方向に一定の間隔をあけて突設して ェンケース86を介して右側の搬送体42の駆動プーリ いる。前方延伸軸ケース61中には前方延伸軸66を軸 44を連動連結するとともに、右側のプーリ駆動軸85 架し、前方延伸軸66にギヤケース62内のギア67, の中途部には、右側の移送体80の駆動プーリ81を取 68を介して円板支軸63を連動連結している。そして 50 り付けている。177は搬送部伝動ケースである。 ( 8 ) JP 13 2015-177761 A 2015.10.8 14 【0044】 傾倒姿勢で整列されて移行される。そのため、作業者O 収穫部伝動横軸150の右側部には、前後方向に延伸す pはねぎNの全体(根茎部Naと葉部Nb)を容易に確 るチェンケース51の後端部を連動連結する一方、チェ 認することができる。また、ねぎNが作業者Opに接近 ンケース51の前端部に回転体支軸53の右側端部を連 する方向である左側後上方へ向けて搬送されるため、作 動連結している。回転体支軸53の左側端部には掻き落 業者OpはねぎNを身近で触ることもできる。そのため とし部22を取り付けている。収穫部伝動横軸150の 、作業者Opは、ねぎNに残された付着土塊D3を落と 左右側部には、それぞれ前方延伸軸ケース61,61中 す等の調整作業を、前方を視認したまま容易に行うこと に軸架した前方延伸軸66,66の後端部を連動連結す ができる。したがって、収穫作業能率の向上と作業者O る一方、前方延伸軸66,66の前端部に、ギヤケース pの疲労低減を図ることができる。 62,62を介して円板支軸63,63の基端部(左側端 10 【0050】 部)を連動連結している。前方延伸軸66にギヤケース (4)搭乗用ステップ部24に搭乗した作業者Opの立 62内のギア67,68を介して円板支軸63を連動連 ち位置の左側方において、姿勢変更・整列部23により 結している。 姿勢変更されたねぎNが板状の収集部25上に自動的に 【0045】 落下して収集さらには貯留されるため、種々の操作を行 このように構成した動力伝達機構Mでは、エンジン12 っている作業者Opに収集作業が支障となることがない から各作業部に動力を伝達することができて、ねぎNの 。その際、収集部25上にはねぎNが整然と収集される 収穫が効率良く行えるようにしている。 ため、作業者Opは、収集されたねぎNの収集姿勢を修 【0046】 正する等の手間が不要となる。したがって、この点から 本実施形態に係るねぎ収穫機Aは、上記のように構成し も収穫作業能率の向上と作業者Opの疲労低減を図るこ ているものであり、かかるねぎ収穫機Aでは、以下のよ 20 とができる。 うな作用効果が生起される。 【0051】 【0047】 (5)収集部25を配設した側とは反対側に操作部14 (1)収穫部2の各作業部と搭乗用ステップ部24を前 を配設しているため、操作部14が作業者Opの前方視 後方向に延伸する仮想同一直線L上に配設しているため 界を遮ることない。したがって、この点からも収穫作業 、搭乗用ステップ部24に搭乗した作業者Opの立ち位 能率の向上を図ることができる。 置において、各作業部の作業状況、さらには、ねぎNの 【0052】 収穫状況を、直後方から容易に視認することができる。 (6)回転体54の外周面に多数突設した各突片57の したがって、ねぎNと収穫部2とに位置ズレが生じてい 先端部が根茎部Naに沿うように、各突片57の突出高 たとしても速やかに対処することができる。例えば、ね さに変化をもたせているため、各突片57の先端部がね ぎNを栽培している畝Uに対して掘り起こし部20を進 30 ぎNの根茎部Naに付着している土塊D1に衝撃を与え 入させる走行機体1の位置を調整する等の対処を速やか て土塊D1を砕くことができる。この際、ねぎNの根茎 に行うことができる。その結果、ねぎNと収穫部2との 部Naの下方に位置する付着土塊D1のみならず、ねぎ 位置ズレによるねぎNの損傷を低減することができる。 Nの根茎部Naの側方に位置する付着土塊D1も砕くこ 【0048】 とができて、付着土塊D1を堅実に掻き落とすことがで (2)掘り起こされたねぎNが搬送部21により後上方 きる。したがって、土落とし残しを低減させることがで へ向けて搬送されるため、その直後方において搭乗用ス きて、土落とし残しを処理する作業(調整作業)の手間 テップ部24に搭乗した作業者Opは、搬送部21によ を低減させることができる。 るねぎNの搬送状況を堅実に視認することができる。そ 【0053】 のため、例えば、ねぎNと掘り起こし部20との左右方 (7)根茎部Naの直下方に位置して突出幅が短幅の突 向の位置ズレや、掘り起こし部20による掘り起こし深 40 片57aが、根茎部Naの下端部に付着している土塊D さのズレ等を容易に確認することができる。したがって 1に衝撃を与えてこれを砕くため、根茎部Naの左右側 、ねぎNと収穫部2とに位置ズレが生じたとしても速や 部に付着している土塊D1が左右に分離されるとともに かに対処することができる。その結果、ねぎNと収穫部 、根茎部Naの左右側方に位置して突出幅が長幅の突片 2との位置ズレによるねぎNの損傷を低減することがで 57bが、根茎部Naの左右側部に付着している土塊D きる。 1に衝撃を与えてこれらを砕くため、根茎部Naの付着 【0049】 土塊D1が堅実に掻き落とされる。 (3)姿勢変更・整列部23がねぎNを起立姿勢から傾 【0054】 倒姿勢に姿勢変更しながら整列させて、左側後上方へ向 (8)突片57がねぎNの根茎部Naに付着した土塊D けて搬送するようにしているため、搭乗用ステップ部2 1に衝突する方向と、搬送部21の搬送方向とが同一方 4に搭乗した作業者Opの立ち位置の左側方へねぎNが 50 向となるようにしているため、突片57がねぎNに衝突 ( 9 ) JP 15 2015-177761 16 したとしても、その際のねぎNへの衝撃を小さくするこ A ねぎ収穫機 とができる。そのため、ねぎNの損傷を低減することが N ねぎ できる。 Na 根茎部 【0055】 Nb 葉部 (9)回転体54の回転速度が、搬送部21の搬送速度 Op 作業者 よりも大きくなるように(例えば、20倍となるように 1 走行機体 )設定しているため、ねぎNの根茎部Naへの付着土塊 2 収穫部 D1に対して、回転体54に突設した多数の突片57を 20 掘り起こし部 連続的に衝突させて、付着土塊D1に連続的な衝撃を与 21 搬送部 えることができる。そのため、付着土塊D1が堅実に砕 10 22 掻き落とし部 かれて、土落とし残しを大幅に低減させることができる 23 姿勢変更・整列部 。 24 搭乗用ステップ部 【符号の説明】 54 回転体 【0056】 57 突片 【図1】 【図2】 A 2015.10.8 ( 10 ) JP 【図3】 【図5】 【図4】 【図6】 2015-177761 A 2015.10.8 ( 11 ) 【図7】 JP 【図9】 【図10】 【図8】 【図11】 2015-177761 A 2015.10.8 ( 12 ) JP 2015-177761 A 2015.10.8 【図12】 ──────────────────────────────────────────────────── フロントページの続き (72)発明者 稲垣 晴三 大阪府大阪市北区鶴野町1番9号 ヤンマー株式会社内 Fターム(参考) 2B072 AA08 BA01 BA28 CA03 CA12 CB01 2B085 AA01 AC42 AC70 BA29 CA17 CA50 EA06 FA01 FA03 FA07
© Copyright 2026 Paperzz