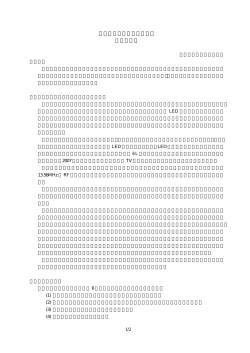
目次 1 スケジュール...................................................................................................................................2 2 注意事項...........................................................................................................................................2 3 マイコン基板の製作.......................................................................................................................2 4 センサー基板の製作.......................................................................................................................3 5 モータードライバ基板の製作.......................................................................................................3 6 本体の製作.......................................................................................................................................4 7 プログラミングの基礎...................................................................................................................5 8 ライントレーサーのプログラミング.........................................................................................10 9 回路図.............................................................................................................................................10 10 発展編:F3RC に向けて.............................................................................................................13 11 発展編:設計について(ハードウェア編)...........................................................................14 12 発展編:設計について(ソフトウェア、回路編)...............................................................15 1 1 スケジュール この講習会は全 6 回を予定しています。 回 日付 内容 1 基板、本体の製作 2 基板、本体の製作 3 プログラミング(1)、ライントレース(1) 4 プログラミング(3) 5 プログラミング(2)、ライントレース(2) 6 ライントレース(3) 2 注意事項 1. 新入生歓迎会に参加した人は、その時に作ったライントレーサーのギヤボックスを再利用しま すので、忘れずに持ってきてください。 2. ハンダゴテに加えて、各種の工作機械も使います。怪我には十分に注意しましょう。 3. この資料をよく読んで、電池や電子部品の極性(向き)を間違えないようにしましょう。向き を間違えると壊れてしまう可能性があります。 4. わからないことがあったら遠慮せずに先輩に質問してください。 3 マイコン基板の製作 それでは早速製作に入って行きましょう。まずはマイコン基板、人間で言うところの脳に当たる部 分です。プログラミングをすることでいろいろな動作をさせることが出来るようになります。 はんだ付けをしている間に、二人づつ部室で本体の製作を行なってもらうので、自分の順番が来たら 作業を中断して先輩の指示に従ってください。 中学の授業ではんだ付けをやったことがある人もいるとは思いますが、改めて簡単にはんだ付けに ついて説明したいと思います。 はんだ付けは電子工作の基本中の基本で、これの失敗が回路が上手く動かない原因となることが多 いです。練習を重ねて、ハンダ不良を減らしましょう。 はんだ付けの手順は 2 1. 部品の足をランドに差し込む 2. 小手先で基板のランドと足を加熱する(1、2 秒くらい。慣れてくれば何となく分かる) 3. はんだを軽く押し付け、適量を流し込む(富士山のような形になるくらい) 4. はんだがランドに行き渡ったら、はんだ、コテの順にランドから離して、冷却するのを待つ 5. 余分な足をニッパで切る 6. ハンダ不良がないか確認する となります。適量、くらい、など曖昧な表現が多いですが、自分の手を動かしているうちに感覚的に身 につくと思います。また、はんだ付けの順番は背の低い部品から順につけていくことがセオリーです。 6 のハンダ不良とは、はんだ付けが失敗している状態のことです。隣とくっついてしまっていたり、 ランドと足がしっかり接合していなかったりすると、回路がしっかり動いてくれないばかりか、最悪の 場合、故障の原因となります。はんだ付けの良し悪しが見分けられることもスキルの一つです。 とはいえ、絶対にはんだ付けを失敗しないということは有り得ません。部品の向きを間違えてし まったり、交換する必要が出てくる場合もあります。その場合、はんだを溶かして、部品を取り外す必 要があります。 ・外した部品を再利用したい場合、ハンダ吸い取り線やハンダ吸い取り器を使います。 1. ハンダ吸い取り線を使う場合、吸い取り線を外したい場所の上に乗せて、その上からハンダゴ テで加熱します。すると、溶けたはんだが吸い取り線に染みこんで、はんだを取り除けます。 2. 吸い取り器を使う場合、吸い取りのバネをセットしてから先端を外したい場所に近づけて、コ テではんだを溶かし、吸い取り器のボタンを押すと、溶けたはんだが吸い込まれます。 ・部品がいらない場合、部品面側(ハンダ付けしていない方)で足を切り、残った足は、コテで熱し て取ります。 また、複数人で協力したりして、いくつかのハンダゴテで部品の足を同時に加熱し、抜き取る方法も あります。 4 センサー基板の製作 次はセンサー基板です。人間で言う目に当たる部分です。 5 モータードライバ基板の製作 最後にモータードライバ基板の製作です。はんだ付けもこれで終わりになります。 ・モータードライバ ・モーターに線、コンデンサをつける 3 6 本体の製作 本体はアルミ板を加工して作ってもらいます。ロボットの金属部分は鉄でできているというイメージ を持つ人が多いようです。しかし、規模にもよりますが一般的には金属部分はアルミが使われることが 多いです。アルミ、と一口に言ってもいろいろあります。形状で言えば今回使う板状のものもあれ ば、 L 字 やコ の字 の棒 、四 角柱 、円 柱な どが あり 、 材 質で 言え ば今 回使 う 5052 の他 に、 2000 番、1000 番などがあります。アルミといっても実際にはアルミ合金のことを示すことが多く、合金で ないものを示す時は純アルミと呼びます。 アルミ板を目指す車体の形にするためにはおよそ 4 つのステップがあります。 1. 穴の位置に目印をつける 2. 目的の形に切り出す 3. 穴を開ける 4. 曲げる 6.1 けがく まずはアルミ板に目的とする形の目印を付けましょう。定盤とハイトゲージという道具を使います。 外形、穴の位置、曲げ線をけがきましょう。 6.2 切り出し のこぎりやカッター、ヤスリを使って目的の形に切り出します。終わった後はバリをヤスリやカッ ターでとって、触った人が怪我をしないようにしましょう。尖った角も落としておいたほうがいいかも しれません。 6.3 ポンチうち、穴あけ けがいた線の交点に、ポンチをあて、真上からハンマーで一回叩いてへこみを付けます。適切な深さ に一発でポンチが打てるようになりましょう。こうすることで、正しい位置にドリルで穴を開けやす くなります。穴あけにはボール盤を使います。今まで出てきた工具の中では最も危険です。安全に十分 気をつけてください。使い方は以下の通りです。 手袋を使って作業をすると巻き込まれてけがをします。絶対にやめましょう。 1. チャックにドリルを取り付け、スイッチを入れてドリルの軸がぶれていないか確かめスイッチ を切る。 2. 右手でハンドルをおろし、ドリルの先端が穴開け位置に来るようにアルミ板を動かす。この 時、必ず下に当て木を置くこと。 3. ドリルの先端が軽くへこみに触れた状態で、左手でチャック部分を掴んで上から見て反時計回 りに回すと、アルミ板が動いて目的の位置がピッタリとドリルの真下に来ます。 4. 左手でしっかりと板を固定し、右手でスイッチを入れてからハンドルを下ろしていきます。 4 5. アルミ板を貫通すると右手に伝わる感触が変わるので、そうしたらハンドルから手を離して、 スイッチを切ります。感触の違い以外に、下の当て木の粉が出てくるのでそれで判断しても良 いです。 6. 裏側にバリが出ているので、カッターで切り落とすか、少し穴より大きいドリルを手で持って 当てて何回か回してやるとバリが取れます。 穴あけ中に何か異変が生じた場合、右手はその位置から動かさずに(あるいは更に下に押し付け る)、左手を材料から離してスイッチを切ってください。材料がドリルの回転によって吹っ飛ぶのを防 ぐためです。 6.4 曲げ 今回の車体では精度はあまり必要ありませんが、曲げで精度を出すには慣れが必要です。使う工具は 曲げ機、万力などです。 7 プログラミングの基礎 プログラミングの詳細はマイコン講習会テキストに任せるとして、こちらでは大まかな概要を書いて いきます。 ・LED の点滅 まずは LED を点滅させるところからです。ものすごく地味ですが、千里の道も一歩から、というこ とで頑張りましょう。 ・フローチャート さて、プログラミング言語の文法のことは置いておいて、フローチャートの話をします。フロー チャート、流れ図――化学の実験で書かされた人もいるかもしれません――は手順や動作を図を使っ てわかりやすく整理したものです。プログラミングを書く前に簡単でもいいのでこれを書いておくと頭 を悩ますことが少なくなるかもしれません。本当はこれにもいろいろと細かいルールがあるのです が、今は最低限二つのことを覚えてください。 処理 条件 この二つです。これだけでは何のことかわからないので、例としてサークル選びを用いましょう。サー クルを選ぶときの頭の中を日本語で書くと、 「ここ面白そうだな、見学に行ってみて面白そうだったら入るけど、面白くなかったら勧誘とか嫌 だから捨てアドを教えておこう。他のサークルも色々見てみたい。」 みたいな感じでしょうか。これをフローチャートにすると以下のようになります。 5 見学するサークルを選ぶ 見学する 面白い? いいえ 捨てアドを教える はい 入る 実はこの図だといつまでたってもサークル選びを続けることになってしまうので、実際は見学する サークルを選ぶ前に「サークル見学を続けるかどうか」という判断をしていることになります。 フローチャートを用いた説明は今後も出てきますし、前述したようにプログラミング前に考えてお くと見通しが良くなりますので、この二種類の記号だけは覚えておきましょう。 ・スイッチの読取り LED を点滅させた次は、この条件分岐を使って、スイッチが押されたかどうかで動作が変わるよう にしてみましょう。 ・ライントレーサー(1) LED とスイッチとマイコンを組み合わせることが出来るようになったあなたは、もう簡単なライン トレーサーを作ることができます。 今回製作してもらったセンサー基板には 5 つのセンサーが搭載されていて、それぞれが直下の色に よってマイコンの各ピンに約 0V から 3.3V を出力するようになっています。センサー基板が黒を検知 した時は LED が点灯し、マイコンには約 3.3V(=1)が出力されます。一方、白を検知した時は LED が消灯し約 0V(=0)が出力されます。それぞれ先ほどのスイッチを離した状態、押した状態に対応して いることになります。 では、ライントレーサーを動かしてみましょう。ここで次の図のとおりに各センサーに番号をつけま す。センサー 1 と 5 を使ってライントレースしてみましょう。 6 1 2 3 4 5 まずはフローチャートを考えるといいと思います。センサー 1 が反応している時、センサー 5 が反応 している時、両方のセンサーが反応している時、それぞれどんな動きをモーターにさせれば線がトレー スできるでしょうか、場合分けしてみましょう。新入生歓迎会で作ったライントレーサーを思い出すと いいかもしれません。 ところで、新入生歓迎会で作ったライントレーサーは白線の交点に来ると停止してしまいましたね? 今回のライントレーサーは交点に来ても停止しないようにすることができます。どうしたらいいか考え てみましょう。これが出来るようになったら、マイコンを搭載したことで前のライントレーサーより 性能がアップした、と言えるでしょう。 今回は 5 つのセンサーのうち、2 つのセンサーのみを使いました。せっかく 5 つのセンサーがあるの だから、全て有効に活用したいところです。しかし、モーターの動作の状態が、「左 ON 右 ON 」 「左 ON 右 OFF」 「左 OFF 右 ON」の三種類しかないのでは、いくら 5 つのセンサーがあった ところで十分に活用出来ません。例えば、センサー 5 だけが反応している時と、センサー 4 だけが反応 している時、させたい動作は同じ「右に曲がる」という動作ですが、 5 が反応している時は 4 が反応し ている時よりも大きく左にそれていることになるので、より多く曲がったほうが確実に線がトレース できます。 7 そのためには、単純にモーターを ON、OFF するだけでなく、モーターの速度を変えられるように なる必要があります。右のモーターより左のモーターが早く回れば右に曲がります。そして、 2 つの モーターの速度差が大きくなればなるほど、大きく右に曲がります。極端な話、二つのモーターの回転 方向が互いに逆を向くと、その場で(厳密には重心とモーターの位置関係による)回転します。 では、具体的にどうやったらモーターの速度を変えられるでしょうか? もしかしたら、 LED の点 滅の要領で、モーターを動かしたり止めたりを繰り返すことを思いついた人がいるかもしれません。 その考え方を更に発展させたものが PWM(Pulse Width Modulation)です。例えば、10 秒間ライン 8 トレーサーを走らせるとしましょう。この時、 10 秒間ずっと両方のモーターを ON にし続けた場合 と、1 秒間 ON にして、1 秒間 OFF にする、という操作を 5 回繰り返した場合では、進んだ距離が倍 違うはずです。つまり、平均の速度が半分になっています。では、 ON と OFF の周期を 1 秒から 0.5 秒、0.1 秒……とどんどん縮めて言ったらどうなるでしょう。最初のうちは進んだり止まったりを繰り 返している様子がわかりますが、時間が短くなってくると、人間の目には進んでいる時と止まっている 時の区別がつかなくなって、半分の早さで進み続けているように見えそうですね。今度は ON と OFF の時間の比を 1:1 から 1:4 にしてみましょう。 1 秒 ON にして 4 秒 OFF を二回繰り返すわけです。 今度は進んだ距離が五倍違いますね。平均の速度が五分の一になっています。これもまた ON と OFF の周期を短くしていくと人間の目には五分の一の早さで進み続けているように見えます。 tH PWM周期 tH÷PWM周期=duty比 1÷PWM周期=キャリア周波数 PWM周波数 ・タイマー、LCD センサーの感知の仕方によって左右のモータの速度を調整すれば、より早く、より正確にライント レースできるようになるでしょう。調整がうまく行っているのかどうかを確かめるために、ストップ ウォッチが欲しいところです。そこで、マイコンのタイマー機能と LCD と呼ばれる液晶を使ってス トップウォッチ機能を追加します。先ほどの PWM もタイマー機能の一部です。 ・AD 変換 今まで何分間ライントレーサーカーを走らせたかはわかりませんが、モーター用電池が消耗してモー ターのスピードが落ちてきているかもしれません。電池残量によってスピードが変わってしまって は、この前は上手く走っていたのに、今回は走れない、なんてことが起きてしまうかもしれません。 最も有効な対策は、ロータリーエンコーダと呼ばれるセンサーを使ってタイヤの回転速度を計測し、 一定に保つことですが、ここでは、モーター用電池の電圧を測定して、電圧が下がっていたら電池を交 換するという原始的な方向で行きましょう。電圧に合わせて速度を調整してみることに挑戦してみても 9 いいかもしれません。電圧を測定するには、 AD 変換(ADC 、Analog to Digital Converter )という 機能を使います。スイッチやセンサーの読取りではマイコンは 0 か 1 かの判断しか出来ませんでし た。 AD 変換を使うと、 0V から Vref (設定や回路による。ここでは 3.3V )までを 0 から 1023 に分 けてマイコンに読み取らせることができます。例えば、電池電圧を AD 変換した結果、900 という値 が出てくれば、電池電圧は 3.3V*(900/1024)≒2.900V だとわかるわけです。 AD 変換を使う時の注意としては、測定する電圧が定格以下でないとマイコンが壊れてしまう可能性 がある、ということです。アルカリ電池の初期電圧は 1.6V のはずですが、実際には 1.7V ある場合も あり、二本直列だと最大で 3.4V 程度です。今回使うマイコンのデータシートによれば、アナログピン には VDD(今回は 3.3V)+0.3V 掛けても大丈夫だそうなのでセーフですが、万が一ということもあ るので、抵抗を使って電圧を下げておきました。 ・UART 今までは LCD に文字を表示していましたが、 16 文字×2 行の LCD では情報量に不足を感じること があるかもしれません。例えば、 USB ケーブルでマイコンとパソコンを繋いで、 LCD の代わりにパ ソコンの情報を表示できたら便利そうですね。残念ながら、パソコンと USB で繋ぐことの出来るマイ コンは限られていて、今回のマイコンにはその機能はついていません。このマイコンの扱える通信に は UART、SPI 、I2C などがあり、今回は UART を使ってパソコンと通信を試みます。 UART、マイ コンによっては USART と書かれていますが、いずれにしてもパソコンを使っていてこの文字を目に したことはないでしょう。パソコンには UART は搭載されていないのです。しかし、世の中には USB と UART を変換してくれる便利な IC が存在します。 FT232 が有名で、秋月電子などで入手出来ま す。 UART の信号ピンには TX 、 RX の二つがあり、 TX が送信用、 RX が受信用です。つまり一方の TX を他方の RX に繋げば通信出来ます。また、一方向の通信だけ出来ればいい場合は、信号線は一つ ですみます。 8 ライントレーサーのプログラミング それでは、今まで学んできたことを使って、より早くコースを走れるライントレーサーをプログラ ミングしてみましょう! より早く走るためには、ギヤボックスを組み替えてギヤ比を上げる必要があ ります。38.2:1 が限界です(12.7:1 はトルクが足りない)。 9 回路図 今回製作した 3 つの基板の回路図を示します。 ・モータドライバ基板 10 A B VCC3V C VCC3V VCC3V 0.01u 0.01u 1 D1 SIG1 1.5V*2 SIG2 Q1 IRLU3410 Q2 IRLU3410 R1 10k GND 2 1 D2 R2 10k GND VCC3V GND 2 R3 10k R4 10k GND AD1 A B C 基本は新入生歓迎会のライントレーサーと変わりません。Q1、Q2 は FET と言って、電圧で制御で きるスイッチだと思ってください。 Pch、Nch の二種類があり、今回使った NchFET はゲートにしき い値以上の電圧がかかるとドレイン・ソース間に電流が流れるので、マイコンから信号を送るとモー ターが回転します。直接マイコンにモーターを繋げば回りそうなものですが、マイコンのピンから流せ る電流の大きさには限りがあるため、間に FET をはさみます。FET のゲートに付けた抵抗はプルダウ ン抵抗で、マイコンからの信号がない時は FET が閉じた状態になります。モーターに付けたコンデン サはモーターのブラシで生じるノイズを吸収するためのものです。ダイオードはモーターの逆起電力 (レンツの法則だったか?)を回生するためのもので、フライホイールダイオードといいます。本来は FET のドレイン・ソース間にもつけるべきですが、寄生ダイオードと呼ばれるものが FET には付いて いるので今回は無しとしました。モーターの中にはコイルが入っています。それに電流が流れている状 態で急にスイッチを切ると、コイルは電流を流し続けようとして、電圧を発生させます。生じた電圧で FET が壊れるのを防ぐために、ダイオードに電流を通し、吸収します。この時、反応速度が早いダイ オードを使う必要があり、今回はショットキーバリアダイオードと呼ばれるものを使いました。 下の抵抗二本からなる回路は分圧回路です。VCC の電圧を半分にして AD1 に出力します。抵抗の誤 差により、ぴったり半分にはなりませんが、それほど精度は必要としないのでよしとします。 ただモーターを回転させたい場合にはこの回路で十分ですが、多くの場合、逆回転やブレーキをか ける必要があると思います。今回のライントレーサーでも、回転を止めようとしてもすぐには止まって くれず、旋回性能が悪いと感じるでしょう。モーターにそのような動作をさせたい場合、H ブリッジ 回路を使います。 H ブリッジ回路と周辺回路がひとまとまりになったモータードライバという電子部品もあります。 11 これを使う場合、電源電圧やロジック電圧に注意しましょう。また、 PWM への応答が悪いものもあ るので、PWM 対応が明記してあるものを使ったほうがいいでしょう。 ・センサー基板 A B C 1セット 1 VCC 3.3V R2 20k R1 470 C C VR1 100k 1 3 2 4 2 PR1 TPR-105 D LED R3 470 Q1 2N7000 D LED R R R R VR VR3 1 3 2 4 PR2 TPR-105 R R Q2 2N7000 GND VCC3.3V 3 1 2 3 4 5 6 7 CN CN-7P GND 4 センサー基板は少し省略しました。四角で囲った回路が全部で 5 セット並列になっています。 この回路は新歓ロボほぼそのままと言っていいでしょう。ですので詳細は新歓資料を参照してくださ い。VR を調整することで、センサーの感度を変えることができます。マイコンに出力される電圧が中 途半端だと動作が不安定になるので、LED がしっかり点灯、消灯するように感度を調整しましょう。 フォトリフレクタはコスト削減のため外乱光の影響をうけやすい物を使っています。自分で作る時は できれば RPR-220 など可視光フィルタのついた物を使いたいところです。マイコンカーラリーでは光 12 5 変調型フォト IC と赤外線ダイオードを組み合わせることが多いようです。この場合、外部に回路を追 加しなくてもコンパレータ等からなる回路が内蔵されているため容易にノイズに強い回路が構成でき るそうです。また、フォトリフレクタの出力を AD 変換で読み込んでより細かくライン位置を取る方 法もあります。 ・マイコン基板 ・電源について これら 3 つの基板の電源について説明します。マイコン基板とセンサー基板は 9V 電池を三端子レ ギュレータによって 3.3V に降圧して使っていて、モーター基板は乾電池 2 本を電源として使っていま す。グランド(電池の -側)は全て共通です。フォトカプラと呼ばれる部品を使って回路を分離する場 合を除いて、いくつかの回路で信号のやり取りをする場合には必ずグランドを共通にする必要があり ます。 13 10 発展編:F3RC に向けて 以上でライントレーサーの製作は終わりで す。お疲れ様でした。加工からプログラミング までロボット作りの一連の流れを体験してもら 目標を決める いました。これらが出来れば F3RC なんて怖く ない、と言いたいところですが、実のところロ ボット作りにはもう一つのステップがあります コンセプトを決める ――設計です。ここにはロボットを設計するた めのおおまかな流れと、参考になるかもしれな いことが書いてあります。 設計する まずは、ロボット完成までの流れ図です。こ こでは、 F3RC を想定して、複数人でユニット ごとにロボットを作る場合を説明します。 ユニットごとに試作 最初は目標です。どのオブジェクトを何処に 運ぶ、とりあえず目立つなど、目指すものを決 テスト めましょう。 F3RC の場合は複数のロボットが 連携することになります。チームとして何を目 問題点 標にするか(得点勝負、 V ゴール狙い)等と あり 一緒に決めましょう。 なし それにしたがって各機体のコンセプトを決め ていきます。目標を達成するのに最も効率的な 結合 物を、レギュレーションの範囲内で作るとなれ ば、この段階で大体の形が決まると思います。 大体の形が決まると、大まかなスケジュールを テスト 立てられるのが理想ですが、いきなりそれは難 しいでしょう。ただ、皆さんが思っているより 多くの時間が必要だろうとは言っておきます。 問題点 先輩達はロボットの中身について強制すること あり なし はありませんが、ことスケジュールに関してだ けは積極的に干渉していく方針です。 次に、コンセプトに従って設計を進めて行き 完成,練習 ましょう。これについては別に項目を作って説 明します。設計ができたら、部品表等を作って 細かいスケジュールを立てましょう。 そして、ユニットごとの製作、テストを行なって、問題が生じた場合は設計に戻り、問題点を修正す る、ということを繰り返します。 14 ユニットが完成したら、それらを結合、プログラングをしてテストを行います。ここで問題が生じた 場合も設計に戻って問題点を修正することになります。 ロボットが動くようになったら練習をしましょう。ロボットは動かしているうちに壊れてしまうこと が多いです。大会途中に壊れてしまった場合の対処の練習、致命的な欠陥の発見などのために、練習期 間が欲しいところです。生じた故障は調整や修理のため必ずメモに取り、場合によっては改良しましょ う。 11 発展編:設計について(ハードウェア編) いきなりロボットを設計しろと言われてもおろおろしてしまうものです。いきなり図面を書こうとせ ずに、まずはスケッチから始めると良いと思います。機構や全体像について大雑把な絵を書いてみま しょう。ちなみに筆者がスケッチを書くと他人に伝わらないどころか数カ月後に自分が見てもよくわ からなかったりしますがそれでも最後にはちゃんとロボットが完成しています、ので絵が下手な人も大 丈夫です。そういったスケッチ類や、会議の内容、不具合、アイデア、呪詛等をまとめるためのロボッ ト用ノートを用意することを強く推奨します。 アイデアが思い浮かばない時は他のロボットを参考にしてもいいですが、丸パクりはやめましょう。 また、機構を参考にすることも勿論ありですが、何も考えずにそのまま採用せずに、なぜそのように なっているのか、自分のロボットに採用する場合、それに適した形に改良することは出来ないか、自 分の頭で考えると色々と得るものがあると思います。ロボット以外も参考になります。例えば、ロボッ トの操作性をどうするか、という問題に関してはゲーム、ラジコンが参考になるでしょう(B ダッシュ とか)。 スケッチがまとまってきたら、実際の設計に入ります。要求されるスペック(速度、重量、大きさ、 持ち上げるものの重さなど)から、使用する部品を決めます。そして、図面を書いていきます。図面は 無理に CAD を使わずに、方眼紙に書いてもいいでしょう。設計する時には、可動範囲や強度はもちろ ん、作りやすさやメンテナンス性も重視しなければなりません。いきなりですがここでクイズです。 棒 棒 土 台 上の図で、同じ材質、形状の棒の同じ位置に同じ力がかかっています。この時、より大きくたわむの は上と下どちらの棒でしょう? 15 上と答えた人はまず居ないと思います。もし間違えてしまったとしてもうっかりしていただけでしょ う。他にも、上の棒にかかる力の位置が右に移っていった場合たわみはどうなるか、薄っぺらい紙と それを箱状に折ったものではどちらが頑丈か、など、 こういう素朴な感覚が設計をする時に大切で す。 作りやすさやメンテナンス性については、自分が制作する時を想像してみましょう。ありがちなミス としては、曲げられない形をしている、他の部品を外さないと外せない部品がある、ドライバーが入ら ない、などがあります。 ここに書いたことは極々僅かなことに過ぎません。後のことは自分で経験したり、先輩に聞いた り、調べたりして学んでください。 12 発展編:設計について(ソフトウェア、回路編) 回路の場合もいきなり回路図を書こうとしないで、まずは必要な機能を書き出しましょう。そして、 機能を満たすのに必要な部品を選定します。この時、データシートをしっかり読んで定格を超えること がないようにしましょう。インターネットにはいろいろな回路が公開されています。これらを参考にす る場合もハードウェアの場合と同様に自分の頭で色々と考えてから使いましょう。特に、定格には注 意する必要があります。 今回の講習会で使ったマイコンの機能はごく一部にしか過ぎません。マイコン講習会資料には一度 しっかり目を通しましょう。 一つのロボットに搭載するマイコンは一つでなければならないという決まりはありません。 UART や SPI、I2C などの機能を利用して複数のマイコンを連携させることができます。例えば、 8 のボタン を持つコントローラーを作ろうとした時、普通に作ろうと思ったら 8 信号線とグランド( +VCC)の 9(10)本の線をコントローラーと本体の間に伸ばさなければなりません。しかし、コントローラー側 にもマイコンを積んで UART で本体に送信するようにすれば信号線 1 とグラウンドの 2 本だけで済み ます。また、アナログパッドなどを使う場合も、信号線があまりに長いとノイズが乗ってしまうので、 コントローラー側で AD 変換した結果を送信したほうが安定します。あちこちに大量のケーブルを繋 ぐと、メンテナンス性も悪く、断線による故障も頻発するので上手く活用すると良いでしょう。な お、今回使ったマイコンはそれなりに高機能なものですが、入手性が悪いという欠点があります。コン トローラーの信号用に使うにはあまりにオーバースペックですので、ローエンドで入手性のいいマイ コンが使えるようになると工作の幅が広がるかもしれません。強制はしませんが。 回路やライントレーサーに関してはマイコンカーラリーで検索すると充実した情報が出てきます。自 動ロボットを作るときの助けになるでしょう。 16
© Copyright 2026 Paperzz