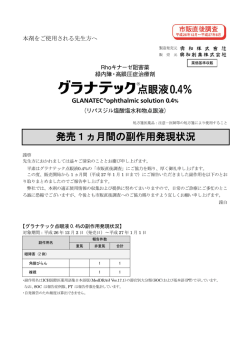
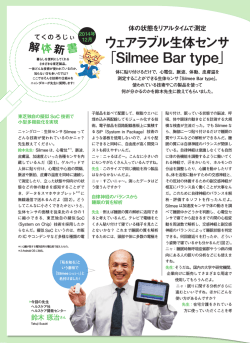
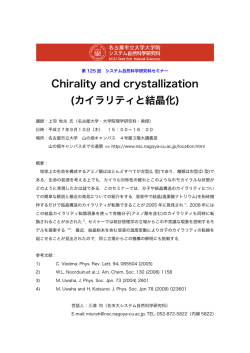
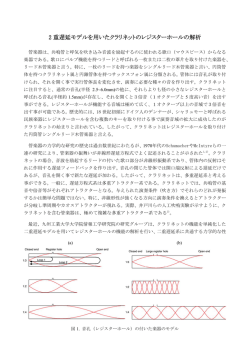
論文 HEV/EV向け電池の充電率推定 SOC Estimation of HEV/EV Batteries 枝本 吉広* 馬場 厚志* 寺西 望* 板橋 欣之介* Yoshihiro Edamoto Atsushi Baba Nozomu Teranishi Kinnosuke Itabashi 長村 謙介* 丸田 一郎** 足立 修一*** Kensuke Osamura Ichiro Maruta Shuichi Adachi Abstract “State of charge”estimation is one of the key technologies in battery electric vehicles (BEVs) and hybrid electric vehicles (HEVs). It is important to derive accurate SOC estimates to achieve maximum battery performance. The accuracy of prior estimations is not accurate enough. A new SOC estimation method,“Sensor-fusion”which integrates the advantages of Coulomb-counting and OCV-Estimation, is proposed in this paper, and its effectiveness is validated under the BEV environment. V and HV Systems, Power Storage System, System Technology, Battery Management, Key Word : E State Estimation, SOC 1. ま え が き これらの状態をセンシングする時,電池内部を直接計 近年の二次電池はエネルギー密度が向上しているもの 測することはできない.そのため電池を管理するには電 の,電気自動車 (Battery Electric Vehicle, 以下 BEV) の 池の入出力(電流・電圧)を観測し電池の状態を推定す エネルギー源としてはまだ十分ではない.また電池の搭 る技術が要求される. 載量を増やそうにもスペースや重量,コスト等の制約が 本稿では,従来の推定法の概論を述べた後に,弊社で あり,内燃機関を持つ自動車と比べると航続可能距離の 独自に開発した BEV/HEV システム向け SOC 推定法に 短さが難点となっている. ついて述べる. そのような中,自動車の動力として電池を利用する側 は,電池に蓄えられたエネルギーをいかに余すことなく 2. 従来の SOC 推定 使い切れるかを考えている.しかし BEV の場合,もし電 電池の SOC を求める基本的な方法として,電池の端子 池残量の見積もりを誤り使い切ってしまうとエネルギー 電圧から推測することが知られている.SOC に応じて起 補給することができず自走できなくなるという欠点があ 電圧が変化する特性を利用し,あらかじめ実験的に求め る.また,エネルギーを多く出し入れする際に促進され た端子電圧と SOC の関係から推測する手法である,ほと る劣化モードがあり,使い方を誤ると電池を劣化させて んどの電池システムでこの手法が何らかの形で使われて しまうだけでなく,バイタルな故障を招く危険性がある. いる. そういったことから自動車における電池管理では,電池 ただし,安定した SOC を得るには,無負荷時の電池内 の状態を正確にセンシングすることが重要になってくる. 部が平衡状態となっている開放電圧(以下 OCV)でなけ 電池管理の主な目的は次の三つがあげられる. ればならない.動作状態では電池の内部抵抗により過電圧 が生じてしまうため,この手法は,電池が安定しているシ • 航続可能距離に関わる状態の検出 ステム始動時の初期 SOC しか求めることができない. 充電率(SOC: State Of Charge) そこで,動作中の SOC を求める手法としては,電流の 劣化度(SOH: State Of Health) 収支を絶えず積算し,初期 SOC からの SOC 変化を計算す • 電池を安全に使うための能力の検出 電力供給/受給能力(SOF: State Of Function) る「電流積算法」を用いるのが一般的となっている.初 期 SOC からの SOC 変化Δ SOC は, • 電池の故障検出 社団法人 自動車技術会の了解を得て「2013年春季学術講演会前刷集」より転載. *電子事業本部 パワーエレクトロニクス設計グループ **京都大学 ***慶應義塾大学 13 CALSONIC KANSEI TECHNICAL REVIEW vol.10 2013 となる.FCC は電池全体の容量(満充電容量)であり, OCV からは直接 SOC に変換できるのに対し,電流積算 した値(単位 [Ah])から SOC(充電“率”)に変換する には,満充電容量を知らなければならない. 満充電容量は設計値から定めるか,もしくは事前計測 により求めることができるが,問題なのは,電池の満充 電容量は劣化すると減少するということである.従って, 電流積算法による SOC 推定は,一見単純に思えるが,満 充電容量を知るための別の仕組みと併用しなければなら Fig. 2 Coulomb counting system ない.また,電流を積算することから,電流センサ誤差 を蓄積してしまい,長時間の運用には適さないという難 点がある. これらの難点に対応するために,近年では電流積算方 式以外に,OCV を推定する方法(以下 OCV 推定法)が知 られている.OCV 推定法は動作中に生じる過電圧を求め ることにより (2) 式を用いて OCV を推定する手法であり, 初期 SOC や満充電容量を知らなくても直接 SOC を割り出 Fig. 3 OCV estimation system すことができ,誤差も蓄積しないというメリットがある. 3. センサフュージョン法を用いた SOC 推定 過電圧は,電池の内部抵抗から生じるものであり,電 流×内部抵抗で求まるものだが,内部抵抗は直接得るこ とができない.OCV 推定とは過電圧の発生原因であるこ の内部抵抗を推定することといえる.電池の内部抵抗は 電気抵抗とは異なり複数の化学的要因により生じており, Fig. 1のような等価回路モデルであらわすことができる. 連なった RC 並列回路は時定数の異なる複数の内部抵抗 要因が存在することを示している. OCV 推定法は,このような等価回路モデルの回路パラ メータを逐次推定(モデルベース推定)するため高度な アルゴリズムが必要になる.ゆえに,入力信号に依存し, 算出値が振動するなどの安定性の面や,計算量が増加す るなどの難点がある.しかしながら,電池を管理する上 で,電池状態を把握できる OCV 推定法は SOC のみを計測 弊社では,これら従来の推定方法の特長を活かした新 たな推定方法を開発してきた.ここからは,弊社が提案 する新たな推定方法(センサフュージョン法 (2))の概要 について述べる. まず,SOC の算出における電流積算法と OCV 推定法の 特徴をまとめてみると <電流積算法> 長所:短時間の相対変化に対する精度は良い 短所:誤差が蓄積(長時間積算時の精度が悪い) < OCV 推定法> 長所:平均的な精度が良い(誤差が蓄積しない) 短所:算出値に雑音が乗る (短時間の動きを正確に求められない) する電流積算法よりもメリットが多い. 電流積算法と OCV 推定法それぞれを用いた場合の電 池管理ロジック構成の例を Fig. 2, Fig. 3に示す.電流 積算法では満充電容量や内部抵抗を求めるためのロジッ クを別に実装しなければならない.それに対し OCV 推定 法では SOC が直接求まることはもとよりその他の電池管 理に必要なパラメータを一括して求めることができる. Fig. 4 Scheme of SOC estimation with sensor fusion Fig. 1 Detailed model 14 HEV/EV 向け電池の充電率推定 Table 1. RMSE % of each method in 4 different conditions. Fig. 5 Electrical current, voltage and SOC with respect to time となり,短所と長所が逆の関係にあることがわかる. センサフュージョン法はこの特徴に着目し,メリット の多い OCV 推定法をベースに両者の長所を融合してい る.全体像を Fig. 4に示す. Fig. 6 Estimation results under electrical current offset error -5A 4.1. シミュレーション条件 OCV 推定法による SOC 推定部とセンサフュージョン シミュレーションでは以下の三手法において,入力信 部からなり,それぞれに計算効率が良くロバスト性の高 号に誤差を与えた時の推定精度を比較する. いカルマンフィルタを用いた.特長であるセンサフュー 1. 電流積算法 ジョン部では,OCV 推定法の SOC 推定値と,電流積算 2. カルマンフィルタによる OCV 推定法 (1) 法にて積算する電流値には白色性の雑音が含まれている 3. センサフュージョンによる SOC 推定法 ものと仮定し,両者の誤差を最小にするようなカルマン フィルタを構成したものとなっている.これにより前述 した OCV 推定法の難点を克服し,SOC 推定精度を向上 させている. 入力条件はつぎの四通りとした. 条件1:電流センサに -5A のオフセット誤差がある 場合 条件2:OCV に +0.2V の初期値誤差がある場合 4. シミュレーションによる検証結果 市販 BEV 車の走行データを用いてセンサフュージョ ン法の有用性をシミュレーションによって示す. 条件3:電圧センサに +40mV のオフセット誤差が ある場合 条件4:SOH に -20% の推定誤差がある場合 シミュレーションに使用する実験によって取得した BEV 車の電流・電圧波形及びその時の SOC 真値を Fig. 4.2. シミュレーション結果 5に示す.急速充電を繰り返しながら,実際に高速道路 各条件における各 SOC 推定法の真値からの誤差の や山岳路を走行した際の波形となっている.なお,SOC 二 乗 平 均 平 方 根 (Root Mean Square Error, RMSE) を 真値は,誤差を最小限に抑えた高精度な電流計測器によ Table 1 にまとめた.この表からセンサフュージョン法 る電流積算法にて算出している.量産車においてそのよ は従来手法が対応できない条件の中で精度良く推定でき うなコストをかけるのは非現実的であることは言うまで ていることがわかる. もない. 15 CALSONIC KANSEI TECHNICAL REVIEW vol.10 2013 また,条件 1 のグラフを Fig. 6に示す.(a) の電流積 算法は電流センサ誤差の影響をそのまま受けてしまうの に対し,(b) の OCV 推定法は波形に雑音がのっているも のの入力誤差の影響を全く受けていない.そして (c) の センサフュージョン法は両者の良い所が融合され入力誤 差の影響をほとんど受けず滑らかでかつ高精度なことが わかる. 5. BEV システムへの適用 ここまでセンサフュージョン法の有効性について述べ てきたが,SOC 推定精度を決めるのは主にベースとなっ Fig. 8 Sensor-fusion System for BEV ている OCV 推定の精度に依存することには違いない. その OCV の推定は逐次推定であるがゆえに,入力波形 により推定精度が悪化するケースがある. Fig. 1の等価回路モデルで示すように,電池の化学的 に発生する内部抵抗要因を RC 並列回路に例えて列挙す ると複数並ぶことになる.このままでは OCV 推定モデ ルとしては複雑すぎるためこれを簡略化している.実際 にセンサフュージョン方式で使用している設計モデルを Fig. 7に示す.内部抵抗要因の中で比較的早い応答の 時定数がサンプリング周期に比べて短いものは,直達項 R0 で近似し,遅い応答部分をまとめて R1 と C1 並列回 路で近似している.また,充電量の変化による電圧変化 を表わすものとして C0 を直列に置いている. 電池の遅い応答の中には,活物質内でのイオンの拡散 など,時定数にすると数秒~数百秒程の無視できない内 部抵抗要因がある.これを逐次推定する場合,可観測性 の問題によりその電圧変化が過電圧なのか SOC 変化によ るものなのか区別がつかないことがある.つまり,遅い 応答による過電圧が顕著に現れるような電流波形,すな わち,DC 成分を多く含む波形からは推定が困難である. 例えば,HEV のように短期間に充放電が繰り返されるよ うなシステムには適しているが,電流が一方向に流れる 割合が多い BEV 等には本来は適さないことになる. 特に低温により内部抵抗が増加した時にはこの部分の 誤差が大きく現れる.センサフュージョン法は OCV 推 定法だけの場合と比べれば精度は向上するものの十分と は言えない. そこで,BEV システムにセンサフュージョン法を適用 する際には, 誤差要因となる遅い応答の過電圧モデル(以 Fig. 9 Estimation results @ 0℃ 下 緩応答モデル)を組み込むことで推定精度を高める 工夫をしている.概要を Fig. 8に示す. 緩応答モデルは,内部抵抗の遅い応答に相当する部分 を事前に実際のセルから計測したいわゆるブラックボッ クスモデルとなっている.観測した端子電圧から遅い応 答に相当する過電圧分を取除くハイパスフィルタ効果に より SOC 推定誤差を軽減させている. BEV 車におけるシャシダイナモを使った 0℃環境下 の 検 証 結 果 を Fig. 9 に 示 す. 走 行 パ タ ー ン は LA 4, 10.15,JC08,NEDC モード走行の組み合わせを2回行って いる.センサフュージョン法だけの場合,遅い応答の過 電圧に対応しきれず推定誤差が大きく出てしまっている が,緩応答モデルを組み合わせたことで誤差が軽減され ているのがわかる. 6. お わ り に センサフュージョン法の優位性と,BEV システムへ の適用について述べてきた.現在までに材料の異なる数 種類の Li-ion 電池にて検証しており市販 BEV 車の SOC Fig. 7 Equivalent circuit model of the battery used 16 出力値と比較しても良好な結果が得られている.現段階 HEV/EV 向け電池の充電率推定 での課題としては,環境条件によっては事前に計測した データに頼らなければならない点があげられ,逐次推定 の特長を最大限活かすために推定モデル及び推定手法の さらなる改良に取り組んでいる. 参 考 文 献 (1) 馬場 厚志,板橋 欣之介,寺西 望,川口 貴弘, 福永 しおり,足立 修一 : カルマンフィルタを用い た HEV/EV 向け電池の内部状態推定」,計測自動制 御学会第 11 回制御部門大会 (2) 馬場 厚志,川口 貴弘,杉浦 文音,足立 修一: 「セ ンサフュージョンを用いた HEV/EV 向け電池の状態 推定」,計測自動制御学会第 13 回制御部門大会 17
© Copyright 2026 Paperzz