第5回知能情報メディアシンポジウム, pp.17-24 (1999)
パノラマ画像群を位置合わせに用いたライブ映像上への注釈提示
とその実時間システム
A panorama-based annotation overlay on video frames and its real-time implementation
興梠 正克 y , 蔵田 武志 z , 坂上 勝彦 z , 村岡 洋一 y
y
早稲田大学大学院 理工学研究科, z電子技術総合研究所
y
z
z
y
Masakatsu Kourogi , Takeshi Kurata , Katsuhiko Sakaue , Yoichi Muraoka
y
Graduate School of Science and Engineering, Waseda University,
概要:
z
Electrotechnical Laboratory
本稿では,映像上への注釈情報の重ね合わせを実現するため,パノラマ画像とその画像上に
添付された注釈を情報源として用いるパノラマベースト・アノテーション手法を提案する.本手法は,
パノラマ画像と入力映像の位置合わせを行い,パノラマ画像上の注釈情報を映像上の対応する位置に
重ね合わせ表示する.カメラの視点が移動しても適切に注釈を表示できるように,環境中の複数地点
で撮影されたパノラマ画像群を用意しておき,最も近い視点位置で撮影されたパノラマ画像を選び出
す.その基準として画像間の位置合わせによる輝度の平均 2 乗誤差 (MSE) を用いる.このカメラの視
点の移動に伴う切替えを可能にするため,パノラマ画像間には隣接関係を与えておく.さらに,この参
照パノラマ画像の切替え状況を監視することで,カメラの大まかな位置とその軌跡を推定することが
可能である.
In this paper, we propose a panorama-based annotation method which uses a panoramic
image as source of information about the positions of the annotations. The proposed method nds
ane parameters of image registration between an input frame and the panoramic image. And then
the method maps the positions of annotations from the panoramic image to the input frame and
displays the input frame overlaid with those annotations. In order to allow the camera to move, a set
of panoramic images are prepared. We select the panoramic image that gives the least mean squared
error of the image registration. The selected panoramic image will be appropriately switched while
the camera moves around. It is also possible to track the position of the camera by monitoring the
status of switching of selected images. Experimental results show that this method can nd image
alignment parameters and display input frames overlaid with the annotations in near real-time.
Abstract:
1 はじめに
必要があるため,例えば建物など遠方の物体の多い屋
外環境では,その注釈を表示できない.一方で,Feiner
映像上への注釈情報の重ね合わせは,実環境とサイバ
ら [6] は衛星 GPS と磁気ジャイロなどの位置・方位セ
ースペースの視覚的な融合を可能とし,拡張記憶 (aug-
ンサーを用いてカメラの絶対位置と方向を推定するこ
mented memory) や不案内な場所のガ イド,アミュー
ズメントなど様々な応用分野に有効な拡張現実感 (AR)
技術の一つである [1][2].
とで,屋外の建物等への注釈表示を可能とした.しか
しながら,これらの位置・方位センサーは利用可能な
実環境を撮影した映像と注釈情報の位置合わせを実
本研究では,パノラマ画像群を映像と注釈情報の位
環境が制限される問題がある.
現する方法として,多くの画像ベースの従来研究では,
置合わせに用いて,注釈つき映像を簡易に生成・提示
人工的なマーカ群 (ducials) を実環境中に配置し,映
するパノラマベースト・アノテーション手法を提案す
像中から検出されるマーカの位置情報に基づいて,カ
る.提案手法では,環境中の異なる場所で撮影された
メラの位置と姿勢を求める手法を用いている [3][4][5].
パノラマ画像群とこれらの各画像上に添付された注釈
しかしながら,マーカを注釈対象に貼りつける必要が
情報,パノラマ画像間の隣接関係の情報を事前知識と
あるため,広範囲な環境をカバーすることは困難であ
して用いる.入力映像に対して,パノラマ画像群との
る.また,映像中で検出可能な大きさにマーカを写す
位置合わせを行い,もっとも良く位置合わせに成功す
るパノラマ画像を選び,その注釈情報を入力映像上の
対応する位置に重ね合わせ表示する.
画像を切替える.次に,参照パノラマ画像上に添えられ
ている注釈情報を,映像上の対応する位置にオーバー
提案手法はマーカや GPS やジャイロなどの位置・方
レ イ表示する.ユーザの移動に伴って,参照パノラマ
位センサーを必要とせず,また,パノラマ画像上の各物
画像が切り替えられることで,適切な注釈情報を提示
体の位置を目で確認できるため,注釈情報の添付など,
できる.また,ユーザの移動に伴う参照パノラマ画像
必要な事前知識の生成作業が簡便である特長を持つ.
の切り替え状況を監視することで,そのユーザの現在
位置とその軌跡を得ることが同時に可能となる.本ア
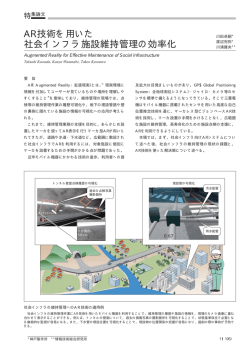
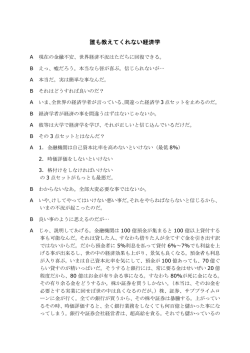
2 パノラマベースト・アノテーション
プローチの概念図を図 2に示す.
映像上への注釈情報の重ね合わせを実現するために,
本研究ではパノラマ画像とその上に添付された注釈を
情報源として用いる新しいアプローチであるパノラマ
0|±
þ2*ÇO"
ííí¤¹Ý
ONÝ
ベースト・アノテーションを提案する.入力映像とパ
ノラマ画像の位置合わせ結果が得られているとき,図
1に示すように,参照パノラマ画像上の注釈情報を映像
±.+-Nó`¤¹Ý2î
¡·q1G.»¾M§RN
上の対応する位置に重ね合わせることで,注釈つき映
6ZLWFKHG
像を生成できる.
0|±
0|±
¤¹ÝF1
íÞP%¥®j
ó`¤¹Ý
図 2: パノラマベースト・アノテーションの概念図
2.1
入力映像とパノラマ画像の位置合わせ
入力映像とパノラマ画像の位置合わせには ,文献
1Ý
0|'Ý
[7][8] の画像間の位置合わせ手法を用いる.この手法
は,輝度勾配に基づいてアフィンまたは射影動きモデ
図 1: パノラマ画像に基づく注釈表示
ルにより画像間の変換パラメータをロバストに高速推
定する.なお,得られる解の安定性から,ここではア
しかしながら,画像間の 2 次元的な位置合わせでは,
カメラの視点移動による視差の影響を扱えない.この
ため,異なる視点で撮影された入力映像とパノラマ画
像との位置合わせは原理的にはできない.そこで,環
境中の複数の地点で撮影されたパノラマ画像の集合を
事前に用意しておき,最も撮影地点が近いパノラマ画
A
フィンモデルを用いる.アフィン変換行列 は 6-パラ
メータから成り,以下のように表せる.
2
A = 64
a1
a2
a3
a4
a5
a6
0
0
1
3
75
この手法は画像間の平行移動成分 (a3 ; a6 ) が大きい
像を用いて近似的に画像間の位置合わせを行うことで,
と位置合わせパラメータを安定して推定できないこと
この問題に対処する.参照パノラマ画像の切替えを容
が実験的に分かっている.そこで,この手法に対して平
易にするため,パノラマ画像間には隣接関係を与えて
行移動成分だけが異なる複数個の初期値を与えて,そ
おく.
れぞれ位置合わせパラメータ推定を行う.最も良い位
提案手法は、まず最初に,入力映像に対応する参照
置合わせを与えるパラメータを,最終的な推定結果と
パノラマ画像を検索,選択する.そして,その参照パ
する.初期値の個数は,想定される動きの上限と計算
ノラマ画像と入力映像の位置合わせを行う.これと並
機性能に依存して決定される.
行して,隣接するパノラマ画像との位置合わせを行い,
より良い位置合わせ結果を与えるとき,参照パノラマ
位置合わせ結果の評価基準として,本手法では輝度
値の平均 2 乗誤差 (MSE) を用いる.フレーム画像上
A ! によって,パノ
0 0 ) に変換されるとする.ここで,
の点 (x; y ) がアフィン変換行列
f
P
ラマ画像上の点 (x ; y
IP
(x0 ; y 0 ); If (x; y ) を,それぞれパノラマ画像とフレー
2. 隣接先のパノラマ画像 IPj
3. 領域 Rk と対応する IPj の領域間のアフィン変換
A
行列
ム画像上の画素の輝度値とする.S をフレーム画像上の
画素集合とし,NS を集合 S の画素数とすると,MSE
は以下の式 (1) により与えられる.
M SE
=
1
NS
X
2
(x;y )
(If (x; y ) 0 IP (x0; y 0 ))2
Rk :Pi
Pj
このデータ組は,パノラマ画像 IPi の領域 Rk 上で,IPi
と IPj が隣接していることを表現している.
(1)
Ô^ Þ# µ¤·z
, 3M
5N
S
MSE の算出は計算コストが高く,全体の実時間処理を
5 3 → 3
N
L
M
, 3L
難しくする.そこで,画素集合 S の画素を取捨選択し
て,画素数を小さくする.具体的には,輝度の空間勾
Þ
1Ý
配の絶対値が十分に大きな画素だけを選択的に用いる.
2.2
!
, 3M
,I
入力映像とパノラマ画像のスケール係数
図 3: パノラマ画像間の隣接関係
入力映像とパノラマ画像の位置合わせが,平行移動・
回転・スケールで可能であると仮定すると,そのスケー
ル係数は以下の式より求められる.
s
=
p
パノラマ画像 IPi 上の点 (xPi ; yPi )
det Af !P
(2)
このスケール係数 s は,入力映像とパノラマ画像の物
A
列
Rk :Pi
2
64
に近いほど ,入力
映像を撮影した場所とパノラマ画像を撮影した場所が
xPj
yPj
近いことを示していると考えられる.
2.3
は,変換行
によって,式 (3) により変換されるので,
上の点 (xPj ; yPj ) に式 (4) により変換される.
ラマ画像を撮影するカメラの焦点距離をそれぞれ f ; fP
fP =f
Pj
Rk
フレーム画像 If 上の点 (xf ; yf ) は,パノラマ画像 IPj
体の写り方の大きさの比に相当する.入力映像とパノ
とすると,スケール係数 s が
!
2
1
3
75 =
=
位置合わせ結果の評価基準
A
Rk :Pi
A
Rk :Pi
!
Pj
2
64
xPi
yPi
1
! jA !
P
f
Pi
3
75
2
64
(3)
3
7
5
xf
yf
1
(4)
複数枚の異なるパノラマ画像と入力映像の位置合わ
せ結果を比較する評価基準として,輝度値の MSE は
必ずしも適切ではない.入力映像とパノラマ画像の撮
入力フレーム画像 If と参照パノラマ画像 IPi との位
置合わせパラメータが,If の中心位置 (xfc ; yfc ) を領域
内に変換するとき,図 3に示すように,If は Rk が対
影地点が離れていても,2 次元の画像上での位置合わ
Rk
せがうまくいくことがあるからである.そこで,本手
応するパノラマ画像 IPj 上の領域と類似する見込みが大
法では,位置合わせ結果の MSE が一定のしきい値以
きい.そこで,二つの変換行列の積
下であるとき,式 (2) のスケール係数が
を初期値として,入力フレーム画像 If とパノラマ画像
fP =f
に最も
IPj
近い位置合わせ結果を選ぶ.
2.4
A
Rk :Pi
! jA !
P
f
Pi
の位置合わせを並行して行う.
これら複数の位置合わせ結果から,2.3節で述べた評
隣接するパノラマ画像間の移動
価基準に基づいて参照パノラマ画像を選び出す.参照
パノラマ画像が切替えられたとき,ユーザの位置が移
ユーザの実環境中の移動を可能とするため,撮影地
動したと見なす.
点が近接しているパノラマ画像間には,ユーザの移動
この隣接関係は,ユーザの移動による切替えが起こ
に応じて参照パノラマ画像を切替えられるように隣接
りうるパノラマ画像間には必ず一つ以上与えられてい
関係を与える必要がある.
る必要がある.ユーザの移動は多くの場合,視線方向
本手法では,パノラマ画像間の隣接関係を次の 3 つ
のデータ組により表現する.
1. パノラマ画像 IPi 上の領域
への前進であるため,パノラマ画像上でその方向への
移動が可能な領域には隣接関係が与えられている必要
Rk
がある.
2.5
入力映像を含むパノラマ画像の検索
提案手法の初期状態では,入力映像に対応する参照
パノラマ画像は未知であり,画像間の位置合わせに利
用できる初期値は与えられていない.そこで,図 4に
示すように,各パノラマ画像ごとに画像全体を網羅す
る平行移動成分のみの初期値を用意する.これらの各
初期値から推定されるそれぞれの位置合わせ結果から,
2.3節で述べた評価基準に基づいてパノラマ画像とパラ
メータの組を選び出す.次回の位置合わせでは,この
選ばれたパノラマ画像を参照パノラマ画像とし,推定
されたパラメータを初期値として用いる.
初期状態では,2.5節で述べたように,パノラマ画像
群から入力映像を含むパノラマ画像を検索する.この
処理は計算コストが非常に大きくなるため,計算機ク
ラスタ上の全ての計算機により並列処理を行う.それ
以降については,参照パノラマ画像と隣接するパノラ
マ画像との位置合わせが必要であるが,これを一台の
計算機による処理で実現する.
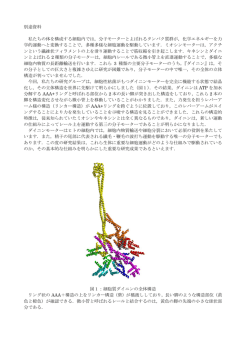
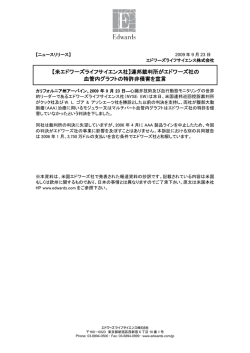
ウェアラブルビジョンシステム
3.2
本ソフトウェアへの映像の入力と伝送,注釈つき映
像の生成結果の表示出力には,我々が試作しているウェ
アラブルビジョンシステム [11][12] を用いる.図 5にそ
の外観を示す.
`/[½#ã-N
Tc1˼oUNï
図 4: パノラマ画像群の検索
3 評価実験
+0'
&&'f¤
図 5: ウェアラブルビジョンシステムの外観
本システムは,ユーザが装着する映像の入出力装置
提案手法を実装して,ユーザが実環境中を移動した
と携帯可能な計算機,および外部の画像処理のための
ときに得られる映像に注釈情報を実時間提示させ,同
据え置き型の計算機クラスタから成っている.図 6に
時にユーザ位置と方向を推定する実験を行った.
その構成を示す.
3.1
提案手法のソフトウェア実装
提案手法を,ネットワーク結合された計算機から成
¡·q
&&'f¤
¤~~3&
,(((
K~ª·j0ESV
3&1R
xab]
るクラスタをターゲットとして,ソフトウェアにより
K/$1
]jvt_®
-3(*ö9
実装した.本ソフトウェアは,計算機の OS やアーキ
Ïj¤tz
3&1R
0_·p~
xab]
3&1R
3&1R
xab]
xab]
テクチャ,ネットワークに依存しないようにするため,
各計算機への処理データの分配と処理結果の集配には
PVM 通信ライブラリ [9][10] を用いる.また,各計算
機上での処理には,スレッドを単位とした並列計算を
行うことで,マルチプロセッサ計算機上では,CPU の
個数に比例した高速化を実現できる.ここでは,具体
t_~|®k
+0'
K]
¨kµM
5)>Ï
5)M>Ï
0_·p~
¿
19*$´
9*$176&
{a®n®·z
図 6: ウェアラブルビジョンシステムの構成
的には,POSIX スレッド (UNIX 全般向け) と Win32
スレッド (Windows NT/9x 向け) を用いている.
提案手法における処理の最小単位は,一つの初期値
に基づくパノラマ画像と入力フレーム画像との位置合
わせである.本ソフトウェアでは,この処理を一つの
スレッドとして実装する.
映像の入力には小型カラー CCD カメラ (Sony CCDMC100) を用い,表示出力には装着型のディスプレー
(島津製作所 DataGlass) を用いている.映像の伝送
には 無線 LAN (IEEE 802.11 準拠 WaveLAN Turbo, 8Mbps) を用いる.映像はラップトップ PC (Sony
VAIO PCG-888, OS: Windows 98) により取り込ま
れ ,JPEG 方式により 1/10∼1/20 のデ ータ量に 圧
縮されてから伝送される.計算機クラスタは,100M
イーサネットに 接続され た 4 台の PC(IBM-PC 互
換機, CPU: Dual PentiumIII-500MHz(2 台), Dual
PentiumII-450MHz(2 台), OS: Linux-2.2.10 SMP 対
応) から成る.このネットワークには,スイッチング
ハブを介して無線 LAN アクセスポイント (10M イー
サネット ) が接続されている.伝送された圧縮画像は,
計算機クラスタ上の計算機により受信され,クラスタ
上で走っている画像処理の各プログラムに再配送され
る.本システムは,複数の異なる画像処理タスクを並
行して処理できるように設計されている.また,映像
の生成結果は,PC 上で X11 の表示として出力され,
ダウンコンバータ (VGA → NTSC) により NTSC コン
ポジット映像信号に変換され,ユーザ側に RF 無線伝
送される.
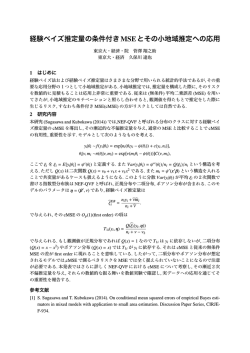
3.3
図 8: 実験に用いたパノラマ画像群 (上から順に地点
A,B,C,D で撮影したもの)
事前知識の生成
で囲む.図 3の例では,この領域は実線の枠に対
評価実験では,図 7に示す実環境上の各点 A{D 上で,
映像入力に用いるカメラを人の視点の高さとほぼ同一
にして三脚を用いてパンして 360 度撮影した映像から
応する.
2. 矩形領域ともう一方のパノラマ画像間の変換パラ
メータを推定して,これをこの領域に関するパノ
生成された 4 枚のパノラマ画像群を用いた (図 8).な
ラマ画像間の変換パラメータとする.
お,これらのパノラマ画像は文献 [8] の手法に基づい
て円筒面投影により生成されている.これらの各画像
上の適切な位置に注釈情報を添えた.
3.4
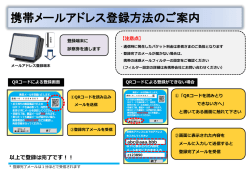
実験結果
評価実験では,本システムのユーザが図 7の下側の
>
79 :6
:6
のときの注釈つき映像の出力結果を図 9,12に示す.そ
ÄÜ
の際のユーザの位置とその向きの推定結果をそれぞれ
図 10と図 11に示す.
この評価実験の結果より,パノラマ画像上に添えら
れた注釈情報を映像上の適切な位置に表示できること
3&
:6
:6
:6
通路側から地点 A → B → C → D の順に移動した.そ
>
図 7: パノラマ画像の撮影地点
が分かった.図 9 の (a) と (b) は A 地点,(c) は B 地
点,(d) は C 地点,(e) と (f) は D 地点のパノラマ画像
をそれぞれ参照している.また,図 9(e) では,壁にか
けられたポスターに関する注釈情報が提示されている.
これは,ユーザが壁に接近した結果,壁の近く (D 地
点) で撮影された参照パノラマ画像が用いられ,より
詳細な注釈情報が提示されたためである.
また,本手法は,隣接するパノラマ画像間の変換パ
ラメータを事前知識として必要とする.これを,以下
の手順で対話的に生成した.
図 12に示すように,参照パノラマ画像には写ってい
ない物体 (人物など ) が入力映像中に含まれていても,
適切な位置に注釈情報を表示できた.また,照明など
の入力映像の撮影条件が多少異なっていても,同様に
1. ユーザは 2 枚の隣接するパノラマ画像を選び,一
注釈情報を表示できた.これは,画像間の位置合わせ
方の画像上で,画像間で重複している領域を矩形
手法 [7][8] が,外れ値に対してロバストであることに
¡·qÏÎ
(a)
(b)
§·ß
図 10: ユーザ位置の推定結果
(d)
¡·q1²»¼¾´
(c)
(e)
(f)
§·ß
図 9: 注釈つき映像の出力結果 (1)
図 11: ユーザの向きの推定結果
よる効果だと考えられる.
図 10に示したユーザの位置の推定結果より,ユーザ
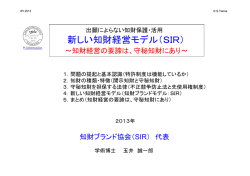
入力映像とパノラマ画像の位置合わせのスケール係
が A → B → C → D の経路で移動したことが容易に読
数 s のグラフを図 14に示す.本実験では,パノラマ画
み取れる.また,図 11に示したユーザの向きの推定結
像を撮影したカメラと同じカメラを用いて入力映像を
果より,フレーム番号 100{150 や 200{230,340{380
撮影しているので,スケール係数が fP =f = 1 に近いほ
付近では,ユーザが周囲を見回していることが読み取
ど ,入力映像の撮影地点がパノラマ画像の撮影地点と
れる.
近いことを表していると考えられる.ユーザが地点 B
本手法が注釈つき映像の提示に要した時間を計測し
から C に移動して,それぞれのパノラマ画像が写して
た.初期状態における 4 枚のパノラマ画像群からの検
いる壁に近付くに伴い,スケール係数が減少している
索に要した時間は,2000{3000 ミリ秒であった.それ
傾向が読み取れる.このスケール係数を用いて,ユー
以降の映像のキャプチャから注釈つき映像の表示まで
ザの前後移動を大まかに推定できる.
に要した遅延時間は 600{800 ミリ秒であり,その処理
のスループットは 100{120 ミリ秒 (毎秒 8{10 フレー
ム) であった.
4 まとめと今後の課題
前述の評価実験とは別に,ユーザが図 7に示す地点
B 付近から C 付近に上部の壁を見ながら移動したとき
基づいて,注釈つき映像の提示を実現するアプローチ
の注釈つき映像を提示させる実験を行った.参照パノ
であるパノラマベースト・アノテーションについて述
ラマ画像を選び出す基準として用いられた位置合わせ
べ,それを実現する手法を提案して,その実時間シス
本稿では,注釈情報が添えられたパノラマ画像群に
結果の PSNR 値 (MSE が小さくなるほど 大きくなる)
テムを実装,評価した.本システムを用いた評価実験
のグラフを,図 13に示した.このグラフから,ユーザ
を行い,注釈つき映像の表示とユーザの位置と方向の
が地点 B から C に移動するにしたがって,地点 B のパ
検出について,その処理の実時間性と精度に関して良
ノラマ画像の PSNR 値が低下して,地点 C の PSNR
好な結果を得た.
値が増加していることが読み取れる.
今後の課題としては,全方位視覚センサー (eg. Hy-
AAAAAAAAAAAAAAAAAA
A A A A A A AAA
AAAAAAAAAAAAAAAAAA
AA AAA AAA AAA AAA AAA AAA AAAAA
AA
AA
AAAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAAAA
A
A
A
A
A
A
A
AAAAAAAAAAAAAAAAAAA
AA AA AA AA AA AA AAAA
AA
AAAAAAAAAAAAAAAAA
AA
AAAAAAAAAAAAAAAAAA
A
A
A
A
A
A
A
AA
AAAAAAAAAAAAAAAAAA
A
A
A
A
A
A
A
AA
AAAAAAAAAAAAAAAAAA
A
A
A
A
A
A
A
AAAAAAAAAAAAAAAAAA
A A A A A A AAA
AA
18
PSNR値 [dB]
17
16
15
14
13
12
B
C
11
10
0
20
40
60
80
100
120
140
160
フレーム番号
図 13: 位置合わせ結果の PSNR 値
A A A A A A A AA
AAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAAA
AA AA AA AA AA AA AAAA
AAAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAAAA
AA AA AA AA AA AA AAAA
AAAAAAAAAAAAAAAAA
A A A A A A AA
AAAAAAAAAAAAAAAAA
AA AA AA AA AA AA AAAA
AAAAAAAAAAAAAAAAA
A A A A A A A AA
AAAAAAAAAAAAAAAA
AAAAAAAAAAAAAAAAAA
AA AA AA AA AA AA AAAA
1.6
B
C
1.4
fP
スケール係数
1.2
f =1.0
1
0.8
0.6
0.4
0.2
0
0
20
40
60
80
100
120
140
160
フレーム番号
図 12: 注釈つき映像の出力結果 (2)
perOmni Vision[13]) のような異なる撮像系を持つカ
メラで撮影,生成されたパノラマ画像を取り扱う場合
の検証を行う必要がある.同時に照明等の撮影条件の
変化に対してロバストであるように提案手法を拡張す
ることが挙げられる.
また,本システムをより有用なものとするため,事
前知識として必要なパノラマ画像の撮影位置とその個
数,各パノラマ画像間の隣接関係を,自動的に決定す
る手法について検討する必要がある.
謝辞 本研究はリアルワールド コンピューティング(
RWC )プログラムの一環として行われた.
参考文献
[1] R. Azuma, \A Survey of Augmented Reality",
in Presence: Teleoperators and Virtual Environments, vol. 6, no. 4, pp. 355-385, 1997.
[2] J. Rekimoto and K. Nagao, \The world through
the computer: Computer augmented interaction
図 14: 位置合わせ結果のスケール係数
with real world environments", in Proc. of UIST
'95, pp. 29-36, 1995.
[3] U. Neumann and J. Park, \Extendible objectcentric tracking for augmented reality", in Proc.
VRAIS'98, pp. 148-155, 1998.
[4] T. Starner, S. Mann, B. Rhodes, J. Levine, J.
Healy, D. Kirsh, R. Picard and A. Pentland,
\Augmented reality through wearable computing", in Presence: Teleoperator and Virtual Environments, vol. 6, no. 4, pp. 386-398, August
1997.
[5] D. Koller, G. Klinker, E. Rose, D. Breen, R.
Whitaker and M. Tuceryan, \Real-time visionbased camera tracking for augmented reality",
in Proc. of VRST'97, pp. 87-94, 1997.
[6] S. Feiner, B. MacIntyre and T. Hollerer, \Wearing It Out: First Steps Toward Mobile Augmented Reality Systems", in Mixed Reality { Merging
, pp. 363-377, Ohmusha-
Real and Virtual Worlds
Springer Verlag, 1999.
[7] 興梠, 村岡, \動画像のグローバルアフィン動きパ
ラメータの実時間推定手法", 信学論 (D-II), Vol.
J82-D-II, No. 7, pp. 1161-1170, 1999.
[8] 興梠, 蔵田, 星野, 村岡, \映像からのパノラマ画像
の実時間生成と可視化", 第 5 回画像センシングシ
ンポジウム (SII'99) 予稿集, pp. 147-152, 1999.
[9] \Parallel Virtual Machine (PVM) Home Page",
http://www.epm.ornl.gov/pvm/.
[10] A. Geist, \PVM: Parallel Virtual Machine, A
Users' Guide and Tutorial for Networked Parallel Computing", MIT Press, 1994.
[11] 蔵田, 興梠, 藤木, 坂上, \ウェアラブルカメラを
用いた高速でロバストな対象物体の 3 次元復元",
第 13 回人工知能学会全国大会予稿集, S3-07, pp.
103-104, 1999.
[12] \ウェアラブルビジョンシステムの実現に向けて",
http://www.etl.go.jp/~kurata/demo/.
[13] 山澤, 八木, 谷内田, \移動ロボットのナビゲーショ
ンのための全方位視覚系 HyperOmni Vision の提
案", 信学論 (D-II), Vol. J79-D-II, pp. 698{707,
1996.
© Copyright 2026 Paperzz